JP6199847B2 - Tactile presentation device - Google Patents
Tactile presentation deviceDownload PDFInfo
- Publication number
- JP6199847B2 JP6199847B2JP2014229422AJP2014229422AJP6199847B2JP 6199847 B2JP6199847 B2JP 6199847B2JP 2014229422 AJP2014229422 AJP 2014229422AJP 2014229422 AJP2014229422 AJP 2014229422AJP 6199847 B2JP6199847 B2JP 6199847B2
- Authority
- JP
- Japan
- Prior art keywords
- cantilever member
- tactile sensation
- piezoelectric element
- actuator
- providing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Landscapes
- User Interface Of Digital Computer (AREA)
Description
Translated fromJapanese本発明は、触感呈示装置に関するものである。 The present invention relates to a tactile sensation providing apparatus.
例えば特許文献1には、タッチパネル等のパネル上で、指等の接触物に対してリアルな触感を呈示する技術が開示されている。特許文献1に開示の触感呈示装置は、パネルを厚さ方向に振動させることにより、操作者に「押した」という押下感を呈示している。 For example, Patent Document 1 discloses a technique for presenting a realistic tactile sensation to a contact object such as a finger on a panel such as a touch panel. The tactile sensation providing apparatus disclosed in Patent Document 1 presents the operator with a pressing feeling of “pressed” by vibrating the panel in the thickness direction.
従来知られている触感呈示装置は、パネルを振動させる振動部の構造によっては、パネルが振動する変位量が小さく、良好な触感を呈示しにくい場合があることから、装置構成上、改善の余地がある。 Conventionally known tactile sensation presentation devices have a small amount of displacement that the panel vibrates depending on the structure of the vibration part that vibrates the panel, and it may be difficult to present a good tactile sensation. There is.
かかる事情に鑑みてなされた本発明の目的は、改善された触感呈示装置を提供することにある。 An object of the present invention made in view of such circumstances is to provide an improved tactile sensation providing apparatus.
上記課題を解決するため、本発明に係る触感呈示装置は、
一端が固定され、他端が開放された揺動可能な片持ち部材と、
前記片持ち部材の延在方向に沿って伸縮可能に該片持ち部材の一方の面側に配置されたアクチュエータと、を備え、
前記片持ち部材が他方の面側から接触物により押圧されると、該片持ち部材が変位するとともに前記アクチュエータが圧縮され、
前記アクチュエータが伸長すると、前記片持ち部材に前記押圧に反する力を発生させて前記接触物に対して触感を呈示し、
前記片持ち部材は、前記他端側の前記一方の面側に、該片持ち部材の延在方向に交差して延在する溝を有する。In order to solve the above problems, a tactile sensation providing apparatus according to the present invention is
A swingable cantilever member having one end fixed and the other end open;
An actuator disposed on one surface side of the cantilever member so as to be expandable and contractible along the extending direction of the cantilever member,
When the cantilever member is pressed by the contact object from the other surface side, the cantilever member is displaced and the actuator is compressed,
When the actuator is extended, the cantilever member generates a force against the pressing and presents a tactile sensation to the contact object,
It said cantilevered member, on the one surface side of the other end side,to have a groove that extends to intersect the extending direction of the該片retention member.
また、本発明に係る触感呈示装置は、
一端が固定され、他端が開放された揺動可能な片持ち部材と、
前記片持ち部材の延在方向に沿って伸縮可能に該片持ち部材の一方の面側に配置されたアクチュエータと、を備え、
前記片持ち部材が他方の面側から接触物により押圧されると、該片持ち部材が変位するとともに前記アクチュエータが圧縮され、
前記アクチュエータが伸長すると、前記片持ち部材に前記押圧に反する力を発生させて前記接触物に対して触感を呈示し、
前記片持ち部材の前記他方の面側に配置されたタッチパッドを備え、
前記アクチュエータは、前記タッチパッドへの前記接触物の接触位置に応じて伸縮変位される。Further, the tactile sensation providing apparatus according to the present invention is
A swingable cantilever member having one end fixed and the other end open;
An actuator disposed on one surface side of the cantilever member so as to be expandable and contractible along the extending direction of the cantilever member,
When the cantilever member is pressed by the contact object from the other surface side, the cantilever member is displaced and the actuator is compressed,
When the actuator is extended, the cantilever member generates a force against the pressing and presents a tactile sensation to the contact object,
A touch pad disposed on the other surface of the cantilever member;
The actuatorRu is stretchable displaced according to the contact position of the contacted object to the touchpad.
本発明によれば、改善された触感呈示装置を提供できる。 According to the present invention, an improved tactile sensation providing apparatus can be provided.
以下、本発明の実施の形態について、図を参照して説明する。 Embodiments of the present invention will be described below with reference to the drawings.
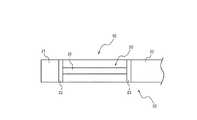
図1は、本発明の一実施の形態に係る触感呈示装置の概略構成を示す側面図であり、図2は、図1の触感呈示装置の概略構成を示す底面図である。触感呈示装置10は、片持ち部材20と、片持ち部材20の一方の面側に配置されたアクチュエータ30とを備える。 FIG. 1 is a side view showing a schematic configuration of a tactile sensation providing apparatus according to an embodiment of the present invention, and FIG. 2 is a bottom view showing a schematic configuration of the tactile sensation providing apparatus of FIG. The tactile
片持ち部材20は、一端が開放端21、他方が固定端22として、可撓性材料により構成される。片持ち部材20は、一方の面(裏面)側に、片持ち部材20の延在方向に離間してアクチュエータ30を保持する一対の保持部23を有する。 The
図1及び図2に示すように、一対の保持部23は、下端側においてアクチュエータ30を挟み込むようにして保持(挟持)する。保持部23とアクチュエータ30とは、例えば接着剤により接着される。 As shown in FIGS. 1 and 2, the pair of holding
アクチュエータ30は、伸縮変位を行うことにより、片持ち部材20を揺動変位させるための駆動源を構成するもので、例えば圧電素子31を用いて構成される。圧電素子31は、電気信号(電圧)を印加することで、構成材料の電気機械結合係数に従い伸縮又は屈曲変位する素子である。これらの素子は、例えばセラミックや水晶からなるものが用いられる。圧電素子31は、ユニモルフ、バイモルフ又は積層型圧電素子であってよい。積層型圧電素子には、バイモルフを積層した積層型バイモルフ素子や、例えばPZT(チタン酸ジルコン酸鉛)からなる複数の誘電体層と、該複数の誘電体層間に配置された電極層との積層構造体から構成されるスタックタイプのものがある。ユニモルフは電気信号が印加されると伸縮変位し、バイモルフは電気信号が印加されると屈曲変位し、スタックタイプの積層型圧電素子は電気信号が印加されると積層方向に沿って伸縮変位する。本実施の形態では、圧電素子31がスタックタイプの積層型圧電素子からなり、図1において、左右方向に伸縮変位する。圧電素子31の伸縮変位は、触感呈示装置10の制御部により制御される。 The
アクチュエータ30が伸縮変位を行うと、片持ち部材20は、固定端22を支点にして、図1において矢印で示すように開放端21を上下に揺動変位する。 When the
図3を参照して、圧電素子31の変位による片持ち部材20の動作について説明する。図3は、圧電素子31の伸長変位による片持ち部材20の動作を説明するための模式図である。図3において、圧電素子31の伸長変位前の触感呈示装置10の状態が実線で、圧電素子31の伸長変位後の状態が二点鎖線でそれぞれ示されている。圧電素子31が、実線で示される伸長前の状態から、二点鎖線で示される伸長後の状態に変位した場合、片持ち部材20は、固定端22を支点にして、開放端21が片持ち部材20の表面側(図3の上方向)に変位する。かかる変位により、触感呈示装置10は、片持ち部材20に接触する操作者に、触感を呈示できる。 The operation of the
圧電素子31が伸長するように変位すると、片持ち部材20は、固定端22を支点にして、開放端21が片持ち部材20の表面側(図3の上方向)に変位し、湾曲した状態となる。図3に示すように、2つの保持部23のそれぞれに沿って延長した線(図3の2つの点線)の交点をOとすると、片持ち部材20の湾曲の形状は、点Oを中心とした円弧状に近似できる。保持部23に沿って延長した点線のうち、固定端22側の保持部23に沿って延長した線を線A、開放端21側の保持部23に沿って延長した線を線Bとする。 When the
ここで、説明の便宜上、圧電素子31、片持ち部材20及び保持部23の厚さを無視すると、図3において、変位後の片持ち部材20を示す仮想的な線(図3の一点鎖線)を線C、2つの点線A及びBがなす角をθ、保持部23の長さをdとする。また、伸長前の圧電素子31の長さをL、伸長後の圧電素子31の長さをL´とする。線Bと線Cとの交点を点Pとして、点Oと点Pとの距離をrとする。また、点Pにおける圧電素子31の伸長変位による上方向への変位量をxとし、本実施の形態において、圧電素子31の伸長量ΔLに対する点Pの変位量xを変位拡大率Gと定義する。 Here, for convenience of explanation, ignoring the thicknesses of the
θが十分小さいとき、線Cと線A及び線Bとの交点間の距離は、伸長前の圧電素子31の長さLに近似できるため、L/r=L´/(r+d)が成立する。従って、圧電素子31の伸長量ΔLは、次式(1)のように表される。
ΔL=L´−L=Ld/r ・・・(1)When θ is sufficiently small, the distance between the intersections of the line C, the line A, and the line B can be approximated to the length L of the
ΔL = L′−L = Ld / r (1)
また、L/2=r×sin(θ/2)と表されるため、点Pの変位量xは次式(2)により表される。
x=L×sin(θ/2)=L×L/(2r) ・・・(2)Further, since L / 2 = r × sin (θ / 2), the displacement amount x of the point P is expressed by the following equation (2).
x = L × sin (θ / 2) = L × L / (2r) (2)
変位拡大率Gの定義により、G=x/ΔLであるから、式(1)及び式(2)により、変位拡大率Gは、次式(3)により表される
G=x/ΔL=Ld/ΔL ・・・(3)Since G = x / ΔL by the definition of the displacement magnification rate G, the displacement magnification rate G is expressed by the following equation (3) according to the equations (1) and (2): G = x / ΔL = Ld / ΔL (3)
式(3)より、圧電素子31の伸長量ΔLが一定に制御される場合、変位拡大率Gは保持部23の長さdの値によって定まる。すなわち、触感呈示装置10において、保持部23の長さdを適宜設計することにより、操作者に良好な触感を呈示するように変位拡大率Gを調整できる。 From Expression (3), when the extension amount ΔL of the
圧電素子31が伸長変位し、触感を提示する場合について、図3を参照して説明したが、圧電素子31は、操作者による片持ち部材20への押圧を検出する押圧検出部としても機能する。図4(a)に示すように、操作者が、片持ち部材20の表面に対して押圧を行うと、片持ち部材20は、固定端22を支点にして、開放端21が下方向に押し下げられる。このとき、圧電素子31は、保持部23により圧縮されるように変位する。 The case where the
圧電素子31は、保持部23からの押圧に係る荷重(力)の大きさ(または、荷重(力)の大きさが変化する速さ(加速度))に応じた、電気的な特性である電圧の大きさ(電圧値(以下、押圧に基づくデータと称する))の出力を行う。圧電素子31から出力された押圧に基づくデータは、触感呈示装置10の制御部に送信され、当該データに対応する押圧(入力)がされたことが検出される。このように、圧電素子31は、触感呈示とともに押圧検出にも用いることができる。 The
制御部は、圧電素子31の出力(押圧に基づくデータ)に基づいて片持ち部材20への押下荷重が所定値に達したことを検出すると、圧電素子31を伸長変位させるように制御する。すると、図4(b)に示すように、片持ち部材20は、固定端22を支点にして開放端21が上方向に変位するように、湾曲する。これにより、触感呈示装置10は操作者に触感を呈示する。 When detecting that the pressing load on the
図5は、図1の触感呈示装置10の要部の回路構成を示す機能ブロック図である。触感呈示装置10は、制御部40と、記憶部41と、圧電素子駆動部42と、上述した圧電素子31とを有する。 FIG. 5 is a functional block diagram showing a circuit configuration of a main part of the tactile
制御部40は、触感呈示装置10の各機能ブロックを含む装置全体を制御及び管理するプロセッサである。制御部40は、制御手順を規定したプログラムを実行するCPU(Central Processing Unit)等のプロセッサで構成される。かかるプログラムは、例えば記憶部41又は外部の記憶媒体等に格納される。 The
記憶部41は、半導体メモリ等で構成され、各種情報や触感呈示装置10を動作させるためのプログラム等を記憶するとともに、ワークメモリとしても機能する。 The storage unit 41 is configured by a semiconductor memory or the like, and stores various information and programs for operating the tactile
圧電素子駆動部42は、制御部40からの制御信号に基づいて圧電素子31に印加する電気信号を生成して圧電素子31に印加する。 The piezoelectric
制御部40は、圧電素子31の出力(押圧に基づくデータ)に基づいて片持ち部材20への押下荷重が所定値に達したことを検出すると、圧電素子駆動部42により圧電素子31を所定の駆動パターンで駆動する。圧電素子31の駆動により、片持ち部材20が変位して、操作者に入力に対する触感が呈示される。 When the
圧電素子31の駆動パターンは、記憶部41に記憶しておくことができる。例えば、押しボタンを押した触感を呈示する場合は、所定周波数の半サイクルのパルス状の駆動電圧を圧電素子31に印加して、片持ち部材20を一往復変位させる駆動パターンとすることができる。その他、所定周波数の複数サイクルの駆動電圧を圧電素子31に印加して、片持ち部材20を複数往復変位させる駆動パターンとすることもできる。 The drive pattern of the
本実施の形態に係る触感呈示装置10は、片持ち部材20の裏面に設けた保持部23により、アクチュエータ30を保持する。アクチュエータ30が伸縮変位を行うと、伸縮変位が片持ち部材20における上下方向の変位に変換され、操作者に触感が呈示される。このとき、変位を変換する場合における変位拡大率Gは、保持部23の長さdにより決定される。そのため、長さdを調整することにより、良好な触感を呈示しやすくなる。また、触感呈示装置10は、従来の触感呈示装置と比較して、簡単な構造で構成することができる。そのため、従来の触感呈示装置と比較して触感呈示装置10の小型化が実現しやすい。触感呈示装置10は、このような特徴を有するため、多様な機器に実装しやすくなる。以下、本実施の形態に係る触感呈示装置10の実装例について説明する。 The tactile
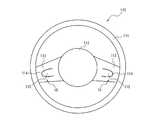
図6は、触感呈示装置10を車両のステアリングホイールに実装した例を示す図である。ステアリングホイール110は、ドライバの手によって握られるリム部111、リム部111の中央に配置され、図示しないステアリングシャフトに接続されてエアバッグ装置及びホーンスイッチ等を収納するボス部112、及び、リム部111とボス部112とを連結する複数のスポーク部113を備える。図6に示したステアリングホイール110は、ボス部112から左右それぞれの方向に延びる2つのスポーク部113を備える。 FIG. 6 is a diagram illustrating an example in which the tactile
ステアリングホイール110は、2つのスポーク部113のそれぞれに触感呈示装置10を備える。スポーク部113は、ステアリングホイール110の中央部から周縁のリム部111に向かうU字型の切れ込み114を有する。切れ込み114の位置は、図6に示したものに限られないが、切れ込み114により形成されたU字部材115が、操作者であるドライバがリム部111を握って車両を運転する場合に、ドライバの指が接触可能な位置に設けられることが好ましい。また、U字型の切れ込み114は、リム部111からボス部112に向かう方向に設けられていてもよい。 The
U字部材115は、触感呈示装置10の片持ち部材20として機能する。U字部材115の先端側(リム部111側)は、図1における開放端21に相当し、ボス部112側は、図1における固定端22に相当する。U字部材115の裏側には、保持部23があり、保持部23により圧電素子31が保持される。 The
ドライバは、ステアリング操作により車両の操舵操作を行うことができるとともに、U字部材115への押圧操作を行うことにより押圧操作に対応する車両の被制御装置の操作を行うことができる。すなわち、ドライバがU字部材115に押圧操作を行うと、U字部材115の裏側に配置された圧電素子31が、図4で説明したように圧縮される。そして、制御部40は、圧電素子31の出力(押圧に基づくデータ)に基づいてU字部材115への押下荷重が所定値に達したことを検出すると、押圧操作に対応する車両の被制御装置に対して所定の操作を行う。所定の操作は、例えば車両の被制御装置が実行可能な機能の1つの選択等であるが、これに限られない。 The driver can perform the steering operation of the vehicle by the steering operation, and can operate the controlled device of the vehicle corresponding to the pressing operation by performing the pressing operation to the
また、制御部40は、圧電素子31の出力(押圧に基づくデータ)に基づいてU字部材115への押下荷重が所定値に達したことを検出すると、圧電素子31を伸長変位させるように制御する。かかる制御によりU字部材115が変位し、ステアリングホイール110はドライバに触感を提示できる。ドライバは、U字部材115の変位(振動)により、目視確認によらず、押圧操作が入力されたことを確認できる。そのため、運転時におけるドライバの視線の移動を防止しやすくなり、運転中における操作の安全性を確保しやすくなる。 Further, when the
触感呈示装置10は、多様な電子機器に実装することができる。触感呈示装置10を実装しうる電子機器には、例えば、スマートフォン等の携帯電話機、携帯型ミュージックプレイヤ、ノートパソコン、腕時計、タブレット端末、ゲーム機、コンピュータ操作用マウス等が含まれるが、これらに限られない。これらの電子機器のうち、触感呈示装置10を実装するコンピュータ操作用マウス及び携帯電話機の例について、具体的に説明する。 The tactile
図7は、触感呈示装置10を実装したコンピュータ操作用マウスを示す図である。マウス120は有線又は無線によりコンピュータに接続され、操作者はマウス120を操作することにより、マウス120に接続されたコンピュータに対して各種操作を行う。 FIG. 7 is a diagram illustrating a computer operating mouse on which the tactile
図7のマウス120は、操作者が右手で操作を行う場合、手のひらで覆うように保持するマウス本体121と、通常人差し指で入力操作を行う左ボタン122と、通常中指で入力操作を行う右ボタン123とを備える。以下説明するマウス120が備える触感呈示装置10に関する機構を除き、マウス120は、従来周知のマウスと同様の構造及び機能を有する。操作者がマウス120を通常の使用態様で保持した場合に指先が配置される側をマウス120の前方、手首が配置される側をマウス120の後方として、以下説明する。 The
マウス120において、左ボタン122及び右ボタン123それぞれの前方側は、上下に変位可能に構成され、マウス本体121への接続部分である後方側は、マウス本体121に対して変位しないように構成されている。すなわち、左ボタン122及び右ボタン123それぞれの前方側は図1における開放端21に相当し、後方側は図1における固定端22に相当する。左ボタン122及び右ボタン123は、裏面側すなわちマウス120の内部側に、それぞれ保持部23を備える。保持部23は、マウス120の前後の方向に伸縮変位可能に圧電素子31を保持している。左ボタン122及び右ボタン123は、それぞれ図1の片持ち部材20に相当する。 In the
操作者が人差し指で左ボタン122を押下(クリック)すると、左ボタン122の裏側に配置された圧電素子31が、図4で説明したように圧縮される。そして、制御部40は、圧電素子31の出力(押圧に基づくデータ)に基づいて左ボタン122への押下荷重が所定値に達したことを検出すると、マウス120が接続されたコンピュータに対して、押圧操作に対応する所定の操作を行うように指示する信号を送信する。 When the operator presses (clicks) the
また、制御部40は、圧電素子31の出力(押圧に基づくデータ)に基づいて左ボタン122への押下荷重が所定値に達したことを検出すると、圧電素子31を伸長変位させるように制御する。かかる制御により左ボタン122が変位し、マウス120は操作者に触感を提示できる。このとき、制御部40は、操作者が実際のボタンをクリックしたような触感(クリック触感)を得られるように、圧電素子31を制御することが好ましい。 Further, when the
また、操作者が中指で右ボタン123を押下(クリック)した場合においても、制御部40は、上述の左ボタン122の押下時と同様の制御を行うことにより、操作者にクリック触感を呈示できる。 Even when the operator presses (clicks) the
図8は、触感呈示装置10を実装した携帯電話機を示す図である。携帯電話機50は、外観形状が概略長方形状を成す筐体51を備える。筐体51は、上部筐体51aと下部筐体51bとにより構成される。上部筐体51aと下部筐体51bとは、弾性部材で構成される接合部52により接合され、1つの筐体51を構成している。接合部52は、防水性のテープ又はスポンジ等として構成されていてもよい。上部筐体51aと下部筐体51bとは、接合部52を介して、互いに変位可能に接合される。上部筐体51aと下部筐体51bとは、変位方向を筐体51の厚み方向に制限するガイドに沿って変位するものであってもよい。 FIG. 8 is a diagram showing a mobile phone on which the tactile
筐体51は、金属や硬質プラスチック等で形成される。上部筐体51aには、筐体51の表面53側にパネル54が配置されている。また、筐体51の内部には、パネル54の下側に図1にパネル54の一部を切り欠いて示すように、表示部55が保持されている。筐体51は、内部に触感呈示装置10を備える。 The
パネル54は、接触を検出するタッチパネル又は表示部55を保護するカバーパネル等からなる。パネル54は、例えばガラス又はアクリル等の合成樹脂により、例えば長方形状に形成される。パネル54は、タッチパネルである場合、操作者の指、ペン又はスタイラスペン等の接触物による接触を検出する。タッチパネルの検出方式は、静電容量方式、抵抗膜方式、表面弾性波方式(又は超音波方式)、赤外線方式、電磁誘導方式又は荷重検出方式等の任意の方式を用いることができる。ここでは、説明の便宜上、パネル54は、タッチパネルとする。この場合、パネル54は表示部55と一体的に構成される場合もある。パネル54は、パネル表面54aの周辺部を除く領域が、筐体51の表面53に形成された開口53aから露出する。 The
表示部55は、例えば、液晶ディスプレイ、有機ELディスプレイ、無機ELディスプレイ、電子ペーパ等を用いて構成される。表示部55は、ブラウザや電子ブック等のアプリケーションソフトウェア(以下、単に「アプリケーション」と記す)における画像(ページ)、アイコンや押しボタン等の入力用オブジェクト等を表示する。 The
図9は、上部筐体51aを取り除いて示す、下部筐体51bにおける触感呈示装置10の配置例を示す平面図である。下部筐体51bには、図9に示すように、下部筐体51bの四隅の周辺に、下部筐体51bの長辺に平行に、4つの触感呈示装置10が配置されている。各触感呈示装置10は、下部筐体51bの中央側において、支持部56により固定端22が固定されている。また、各触感呈示装置10の開放端21には、上部筐体51a側に突起部24が設けられている。触感呈示装置10は、図9に仮想線で示した表示部55の表示領域Dから外れた、下部筐体51bの四隅の近傍で、突起部24とパネル54とが係合するように支持部56により支持される。 FIG. 9 is a plan view illustrating an arrangement example of the tactile
図10は、携帯電話機50の要部の概略構成を示す断面図であり、携帯電話機50の筐体51の長辺に平行な断面を示す図である。図10に示すように、触感呈示装置10は、支持部56により支持され、突起部24においてパネル54に係合する。 FIG. 10 is a cross-sectional view showing a schematic configuration of a main part of the
図11は、携帯電話機50の動作の一例を説明する模式図である。例えば、携帯電話機50の操作者が、図11(a)に示すようにパネル54を押圧すると、パネル54は、接合部52の弾性力に抗して、上部筐体51aと一体となった状態で、筐体51の内部方向(図11(a)では下方向)に押し下げられる。すると、パネル54に係合する突起部24が押し下げられ、突起部24が設けられた開放端21が押し下げられる。固定端22は、支持部56により支持されているため、片持ち部材20は湾曲し、圧電素子31は保持部23により圧縮されるように変位する。 FIG. 11 is a schematic diagram for explaining an example of the operation of the
制御部は、圧電素子31の出力(押圧に基づくデータ)に基づいて片持ち部材20への押下荷重が所定値に達したことを検出すると、圧電素子31を伸長変位させるように制御する。すると、図11(b)に示すように、片持ち部材20は、固定端22を支点にして開放端21が上方向に変位するように、湾曲する。これにより、突起部24が押し上げられ、突起部24に係合するパネル54が、上部筐体51aと一体となった状態で押し上げられる。携帯電話機50は、パネル54のかかる変位により操作者に触感を呈示する。 When detecting that the pressing load on the
なお、本発明は、上記実施の形態にのみ限定されるものではなく、幾多の変形又は変更が可能である。例えば、触感呈示装置10は、片持ち部材20の裏面側に、片持ち部材20の延在方向に交差して延在する溝を有していてもよい。例えば図12(a)に示すように、溝25は片持ち部材20の一部に切り込みとして構成されていてもよい。また、例えば図12(b)に示すように、溝25は、片持ち部材20における一対の保持部23の間において、片持ち部材20の厚みを変化させることにより構成されていてもよい。片持ち部材20に溝25を設けることにより、片持ち部材20が上下方向に変位しやすくなる。また、溝25の位置及び形状を調整することにより、圧電素子31が伸縮変位した場合における片持ち部材20の変位の大きさ等を調整できる。 In addition, this invention is not limited only to the said embodiment, Many deformation | transformation or a change is possible. For example, the tactile
また、触感呈示装置10は、表面側の一部又は全体にタッチパッドを備えていてもよい。図13は、表面側の一部にタッチパッドを備える触感呈示装置10を示す図であり、触感呈示装置10を表面側から見た場合の図である。図13の例において、タッチパッド60は開放端21側に配置されているが、タッチパッド60の位置はこれに限られず、例えば、片持ち部材20全体にわたって配置されていてもよい。タッチパッド60は、操作者によるタッチパッド60への接触位置をタッチ面において検出する。 Further, the tactile
操作者が触感呈示装置10を押圧すると、片持ち部材20が変位することにより、圧電素子31が圧縮されるように変位する。圧電素子31は、押圧に基づくデータを制御部に送信する。また、操作者による触感呈示装置10の押圧時に、タッチパッド60は、接触位置を検出する。検出された接触位置に関するデータは制御部に送信される。制御部は、圧電素子31の出力(押圧に基づくデータ)及びタッチパッド60の出力(接触位置に関するデータ)に応じて、圧電素子31の伸縮変位を制御する。 When the operator presses the tactile
制御部は、例えば、圧電素子31の出力に基づいて片持ち部材20への押下荷重が所定値に達したことを検出し、かつ、タッチパッド60の出力に基づいて所定の位置が接触されていることを検出すると、圧電素子31を伸長変位させるように制御する。制御部は、例えばタッチパッド60における接触位置が所定の位置でない場合、片持ち部材20への押下荷重が所定値に達していても、触感を呈示しなくてもよい。また、制御部は、タッチパッド60における接触位置に応じて、異なるパターンで圧電素子31を伸縮変位させるように制御してもよい。このように、タッチパッド60を備える触感呈示装置10によれば、接触位置に応じた圧電素子31の制御により、触感呈示の方法を多様にできる。 For example, the control unit detects that the pressing load on the
10 触感呈示装置
20 片持ち部材
21 開放端
22 固定端
23 保持部
24 突起部
25 溝
30 アクチュエータ
31 圧電素子
40 制御部
41 記憶部
42 圧電素子駆動部
50 携帯電話機
51 筐体
51a 上部筐体
51b 下部筐体
52 接合部
53 表面
54 パネル
55 表示部
56 支持部
60 タッチパッド
110 ステアリングホイール
111 リム部
112 ボス部
113 スポーク部
114 切れ込み
115 U字部材
120 マウス
121 マウス本体
122 左ボタン
123 右ボタンDESCRIPTION OF
Claims (2)
Translated fromJapanese前記片持ち部材の延在方向に沿って伸縮可能に該片持ち部材の一方の面側に配置されたアクチュエータと、を備え、
前記片持ち部材が他方の面側から接触物により押圧されると、該片持ち部材が変位するとともに前記アクチュエータが圧縮され、
前記アクチュエータが伸長すると、前記片持ち部材に前記押圧に反する力を発生させて前記接触物に対して触感を呈示し、
前記片持ち部材は、前記他端側の前記一方の面側に、該片持ち部材の延在方向に交差して延在する溝を有する、触感呈示装置。A swingable cantilever member having one end fixed and the other end open;
An actuator disposed on one surface side of the cantilever member so as to be expandable and contractible along the extending direction of the cantilever member,
When the cantilever member is pressed by the contact object from the other surface side, the cantilever member is displaced and the actuator is compressed,
When the actuator is extended, the cantilever member generates a force against the pressing and presents a tactile sensation to the contact object,
It said cantilevered member, on the one surface side of the other end has a groove that extends to intersect the extending direction of the該片retentionmember, tactile sensation presentation apparatus.
前記片持ち部材の延在方向に沿って伸縮可能に該片持ち部材の一方の面側に配置されたアクチュエータと、を備え、
前記片持ち部材が他方の面側から接触物により押圧されると、該片持ち部材が変位するとともに前記アクチュエータが圧縮され、
前記アクチュエータが伸長すると、前記片持ち部材に前記押圧に反する力を発生させて前記接触物に対して触感を呈示し、
前記片持ち部材の前記他方の面側に配置されたタッチパッドを備え、
前記アクチュエータは、前記タッチパッドへの前記接触物の接触位置に応じて伸縮変位される、触感呈示装置。A swingable cantilever member having one end fixed and the other end open;
An actuator disposed on one surface side of the cantilever member so as to be expandable and contractible along the extending direction of the cantilever member,
When the cantilever member is pressed by the contact object from the other surface side, the cantilever member is displaced and the actuator is compressed,
When the actuator is extended, the cantilever member generates a force against the pressing and presents a tactile sensation to the contact object,
A touch pad disposed on the other surface of the cantilever member;
Said actuator, said being stretched displaced in accordance with the contact position of the touch object on the touchpad, touch sensitive presentation device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014229422AJP6199847B2 (en) | 2014-11-12 | 2014-11-12 | Tactile presentation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014229422AJP6199847B2 (en) | 2014-11-12 | 2014-11-12 | Tactile presentation device |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017143766ADivisionJP6382409B2 (en) | 2017-07-25 | 2017-07-25 | Tactile presentation device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016095550A JP2016095550A (en) | 2016-05-26 |
| JP6199847B2true JP6199847B2 (en) | 2017-09-20 |
Family
ID=56071165
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014229422AActiveJP6199847B2 (en) | 2014-11-12 | 2014-11-12 | Tactile presentation device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6199847B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6504011B2 (en)* | 2015-10-02 | 2019-04-24 | 株式会社村田製作所 | Tactile presentation device |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4869568B2 (en)* | 2004-06-14 | 2012-02-08 | ソニー株式会社 | Input device and electronic device |
| JP2010157037A (en)* | 2008-12-26 | 2010-07-15 | Nissha Printing Co Ltd | Panel member having oscillating element |
| JP2012073588A (en)* | 2010-08-31 | 2012-04-12 | Kenta Nakamura | Pin input/output device realizing input/output unification |
| JP2013012148A (en)* | 2011-06-30 | 2013-01-17 | Fujitsu Ltd | Tactile presentation touch panel and electronic equipment using the touch panel |
| JP2013238941A (en)* | 2012-05-12 | 2013-11-28 | Kyocera Corp | Piezoelectric device, input device, display device, and electronic apparatus |
| JP6052704B2 (en)* | 2012-07-10 | 2016-12-27 | カシオ計算機株式会社 | INPUT DEVICE, INPUT OPERATION ANALYSIS METHOD, INPUT OPERATION ANALYSIS PROGRAM |
- 2014
- 2014-11-12JPJP2014229422Apatent/JP6199847B2/enactiveActive
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016095550A (en) | 2016-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6073451B1 (en) | Electronics | |
| JP5704428B2 (en) | Touch panel device and control method of touch panel device | |
| CN100430874C (en) | Input/output device and electronic device using the same | |
| JP4543863B2 (en) | Input/output devices and electronic devices with tactile functions | |
| JP6246640B2 (en) | Electronics | |
| WO2005015375A1 (en) | Tactile and force feedback device | |
| JP5700086B2 (en) | Input device and imaging device | |
| WO2015079688A1 (en) | Electronic instrument | |
| JP2017111462A (en) | Tactile sensation presentation apparatus and tactile sensation presentation method | |
| WO2016027668A1 (en) | Tactile sensation presentation device | |
| WO2013061605A1 (en) | Force-feedback device | |
| JP2011175518A (en) | Touch panel device | |
| JP2012068823A (en) | Display device with input function | |
| JP6528086B2 (en) | Electronics | |
| JP6382409B2 (en) | Tactile presentation device | |
| JP6199847B2 (en) | Tactile presentation device | |
| JP6294170B2 (en) | Tactile presentation device | |
| WO2015098061A1 (en) | Electronic instrument | |
| JP6490400B2 (en) | Tactile presentation device | |
| JP6613153B2 (en) | Tactile presentation device | |
| JP2017199200A (en) | Touch manipulation device | |
| WO2015079687A1 (en) | Electronic device | |
| KR20150079445A (en) | Devices, systems, and methods for using corrugated tessellation to create surface features | |
| JP6282575B2 (en) | Tactile presentation device | |
| JP2005339298A (en) | Input device, and electronic device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20161128 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20161220 | |
| A02 | Decision of refusal | Free format text:JAPANESE INTERMEDIATE CODE: A02 Effective date:20170425 | |
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20170725 | |
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) | Free format text:JAPANESE INTERMEDIATE CODE: A911 Effective date:20170731 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20170822 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20170824 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:6199847 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 |