JP4976597B2 - 超音波処置具 - Google Patents
超音波処置具Download PDFInfo
- Publication number
- JP4976597B2 JP4976597B2JP2011553895AJP2011553895AJP4976597B2JP 4976597 B2JP4976597 B2JP 4976597B2JP 2011553895 AJP2011553895 AJP 2011553895AJP 2011553895 AJP2011553895 AJP 2011553895AJP 4976597 B2JP4976597 B2JP 4976597B2
- Authority
- JP
- Japan
- Prior art keywords
- treatment
- distal end
- ultrasonic
- unit
- probe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images























Classifications
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/2812—Surgical forceps with a single pivotal connection
- A61B17/282—Jaws
- A61B2017/2825—Inserts of different material in jaws
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B2017/320064—Surgical cutting instruments with tissue or sample retaining means
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320072—Working tips with special features, e.g. extending parts
- A61B2017/320078—Tissue manipulating surface
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320093—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing cutting operation
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320095—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw with sealing or cauterizing means
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00994—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combining two or more different kinds of non-mechanical energy or combining one or more non-mechanical energies with ultrasound
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Mechanical Engineering (AREA)
- Biomedical Technology (AREA)
- Dentistry (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Description
図1と図2と図3と図4と図5と図6と図7Aと図7Bと図8Aと図8Bとを参照し、本発明の第1実施形態を説明する。
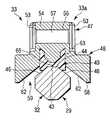
把持部材33の先端部と、処置部32の先端部との間に生じる図7Aに示すような隙間200は、図7Bに示すように凸部60によって埋められている。そのため図7Bに示すように、先端把持部34(処置部32と把持部材33)の最も先端の部分が薄い生体組織H1を把持する際、凸部60は処置部32の先端部と共に生態組織を摘む。このとき、凸部60は生体組織H1に当接し、凸部60によって生体組織H1に強い圧力が加わる。これにより図7Bに示すように、凸部60と処置部32とは生体組織H1を確実に把持し、処置部32と把持部材33とは、凸部60によって生体組織H1を確実に把持する。また処置部32と把持部材33とが生体組織を把持した際に、凸部60は生体組織H1に当接し、凸部60によって生体組織H1に強い圧力が加わるため、超音波振動が処置部32から生体組織に伝達しても、処置部32と把持部材33とに対する生体組織の滑り落ちが防止される。つまり生体組織H1は、滑ることなくしっかりと掴まれる。
外科処置システムの通常使用時には、生体組織は凝固切開処置及び凝固処置を行われる。
図4を参照し、本発明の第2実施形態を説明する。
本実施形態の把持部材33は、第1の実施形態と同様に歯部61を有している。つまり本実施形態の歯部61は、第1の実施形態と同様に、把持部材33の長手軸方向に沿って形成されている複数の歯を有している。
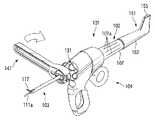
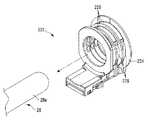
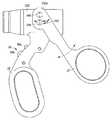
変形例1について図9と図10と図11と図12と図13と16とを参照して説明する。変形例1では、図11に示すように、外科処置具101は、超音波振動子を内蔵する振動子ユニット102と、プローブユニット103と一体のハンドルユニット104との2つのユニットを有する。なおプローブユニット103とハンドルユニット104とは、別体であってもよい。2つのユニットはそれぞれ取り外し可能に連結する。振動子ユニット102とハンドルユニット104の基端部とは、トルクレンチ141によって着脱自在に螺合される。この時、アダプタ151が使用される。アダプタ151は、振動子ユニット102がハンドルユニット104の基端部に着脱する際に、振動子ユニット102の外周面に取り付けられ、操作者が振動子ユニット102を固定保持するために用いられる。
図2に示すように、及び上述したように、プローブ29は挿入シース31に挿通されており、プローブ29の先端部は挿入シース31の先端開口から突出されている。プローブ29の先端部の外周面には、先端開口に対するプローブ29の先端部の突出長さを規定する規定部202が配設されている。規定部202は、突出長さを規定するために、内側シース41iと係合し、内側シース41iに固定されている。
上述した規定部202は、図2に示すように、樹脂材である。規定部202は、内側シース41iとプローブ29との接触を防止し、プローブ29が超音波振動によって内側シース41iと接触して破損することを防止する接触防止部でもある。
図2に示すようにゴムライニング42は、絶縁チューブ41kとプローブ29との間の気密を確保する。これにより本変形例では、気密のための部品を削除できる。
図2に示すように、外側シース41oは、金属パイプ411と、金属のパイプを覆う樹脂チューブ412とを有している。金属パイプ411は樹脂チューブ412よりも長く、金属パイプ411の先端部は樹脂チューブ412の先端部から露出している。挿入シース31が軸方向に移動した際に、樹脂チューブ412がめくれることを防止するために、金属パイプ411の先端部は樹脂チューブ412よりも径方向に膨らんでいる。
プローブ29において、プローブ29の通電に必要な箇所以外には、生体組織がこの箇所に張り付くことを防止するために、コーティングが施されている。この箇所は、図2に示すように、例えば挿入シース31に挿入されている部分29aを示す。
図2に示すように把持部材33の背面33aには、背面33aから生体組織を介して患者に電流が流れることを防止するために、絶縁性のコーティングが施されている。
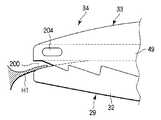
図4に示すように、電極部材48は、パッド部材49が電極部材48からの抜けることを防止するために、パッド部材49の先端部が引っかかる開口部204を有している。開口部204は、電極部材48の側面に形成される例えば横穴である。
把持部材33の電極部材48において、図5に示すような把持部材33の内面である電極受面62には、生体組織が電極受面62に張り付くことを防止するために、通電可能な超撥水性メッキが施されている。また電極受面62以外の背面33aを含む把持部材33の外周面には、外周面から生体組織を介して患者に電流が流れることを防止するために、絶縁性のコーティングが施されている。
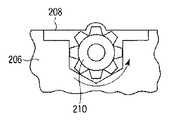
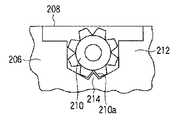
外科処置具21は図15Aに示すように滅菌トレイ206に収容され、図15Bに示すように滅菌トレイ206には外科処置具21を覆うようにシート208が被せられる。滅菌トレイ206と外科処置具21とは、シート208が被せられた状態で、滅菌される。このときシート208全体も滅菌される。外科処置具21において、凸凹形状の回転ノブ210は、ハンドルユニット26よりも径方向に大きい。これにより外科処置具21が図15Bに示すように滅菌トレイ206に収容されると、回転ノブ210ががたつく(回転する)。そのため、外科処置具21が滅菌トレイ206内でがたつき、外科処置具21が傷つく虞が生じる。またシート208が滅菌トレイ206に被せられた際に、図15Bに示すように、シート208と回転ノブ210とが接触し、シート208が擦れ傷つく虞が生じる。
図1に示すように、ハンドルユニット26は、保持筒220を有している。保持筒220の内部には、図16Aに示すような円筒状の接点ユニット222が配設されている。接点ユニット222は、樹脂製の円筒状の電極保持部材224を有している。電極保持部材224は、図16Aと図16Bとに示すように、それぞれ大きさが異なる3個の電極受け部226を有している。電極受け部226には、電極部材228が組みつけられる。電極部材228は、組み立ての簡略化と部品点数の削減のために、電極受け部226に係合する形状を有しており、バネ性を有している。
図16Aに示すように、円筒状の接点ユニット222は、半田付けの工程削減と組み立て性の向上のため超音波振動子28の基端部側における接点部28aに差し込まれる。
図17に示すように、保持筒220の内部には、可動ハンドル37の操作力を把持部材33と接続している内側シース41iに伝達する操作力伝達機構230が配設されている。
図17に示すように、固定ハンドル36は、操作者が固定ハンドル36を把持できるようにリング状を有している。この固定ハンドル36の外周面には、操作者が固定ハンドル36を把持した際に、指が掛けられる凹部252がさらに配設されている。
図17に示すように、固定ハンドル36の内部には、スイッチ部38(切開スイッチ39a及び凝固スイッチ39b)のための基板と、基板とスイッチ部38との間に配設されスイッチ部38の作動力量を向上させる例えば樹脂などの軟性部材254とが配設されている。軟性部材254によってスイッチ部38の作動力量が向上し、スイッチ部38の誤作動が防止される。
図2に示すように可動ハンドル37は、上部にほぼU字状のアーム部256を有する。U字状のアーム部256は、2つのアーム256a,256bを有する。可動ハンドル37は、2つのアーム256a,256b間に保持筒220が挿入される状態で、保持筒220に組み付けられている。
図19に示すように、保持筒220の内部には、可動ハンドル37を介してスライダ部材234の移動に伴い回動する板ばねなどの弾性部材266と、回動する弾性部材266によって弾かれるピン268とが固定されている。弾性部材266と、ピン268とは、例えばバネ受け240に配設されている。ピン268が弾性部材266によって弾かれることで、例えば音が発生する。これにより、可動ハンドル37の握りこみ量が操作者に知らされる。
図20に示すように、スライダ部材234は、爪270を先端部に有している。爪270は、スライダ部材234と一体化しており、スライダ部材234と共に移動する。バネ受け240は、スライダ部材234の移動に伴い移動する爪270によって弾かれるフィルム272を有している。フィルム272は、バネ受け240の周面に形成されており、円盤状を有している。フィルム272が爪270によって弾かれることで、例えば音が発生する。これにより、可動ハンドル37の握りこみ量が操作者に知らされる。
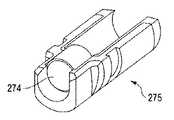
図21Aと図21Bと示すように、先端部にはプローブ29の把持部材33側の面を保護するとともに、プローブ29と内側シース41i(把持部材33との接続部)の間の通電を防止するためのチューブ274を備えたプローブ抑え規定部275が配設されている。チューブ274は、プローブ抑え規定部275と分離しても良い。なお図21Cに示すように、チューブ274は、プローブ抑え規定部275と一体化されていてもよい。
絶縁チューブ41kの先端部は、絞られ、プローブ29と把持部材33とに差し込まれてもよい。
図22に示すように、内側シース41iの一部は、プローブ29に当接するように、プローブ29に向かって絞り加工を施されている。
シースユニット24に挿入されているプローブ29は、基端部において、例えば図示しないピンなどを介してシースユニット24と連結し、シースユニット24と一体となっている。ピンは、ハンドルユニット26における回転ノブ210に内蔵されている。そのためプローブ29とシースユニット24とは、ピンを介してハンドルユニット26によってトルクを掛けられる。
Claims (6)
- 超音波振動を発生させる超音波振動子と、
前記超音波振動子で発生した前記超音波振動を伝達する振動伝達部と、
前記振動伝達部の先端部に形成され、前記超音波振動子からの超音波振動を生体組織へと伝達する処置部と、
前記処置部に対して開閉可能に設けられた把持部材と、
前記把持部材の前記処置部と対向する箇所に設けられているパッド部材と、
前記パッド部材に配設され、前記把持部材が閉状態において前記処置部の長手方向と略平行に配設されている平面状の対向面と、
を具備し、
前記処置部の先端部は、前記パッド部材と対向し、前記処置部の基端部側から前記処置部の前記先端部側に向かって前記対向面から離れる方向に湾曲し、
前記パッド部材は、前記対向面に配設され、前記対向面から前記処置部の前記先端部に向かって突出し、前記把持部材が閉状態において、前記処置部の前記先端部に当接する突出部を有する超音波処置具。 - 前記処置部の先端部は、少なくとも前記パッド部材と対向する側において先細り領域を有し、
前記突出部は、前記処置部の前記先細り領域に沿うように形成されている請求項1に記載の超音波処置具。 - 前記突出部は、前記突出部の前記先細り領域と対向する面の曲率半径が前記処置部の前記先細り領域よりも小さくなるように、形成されている請求項2に記載の超音波処置具。
- 前記先細り領域および前記突出部は、前記処置部の前記先細り領域の曲率半径と前記突出部の前記先細り領域と対向する面の曲率半径が略同一となるように、形成されている請求項2に記載の超音波処置具。
- 前記把持部材は、前記処置部側の部分において前記把持部材の長手軸方向に沿って形成されている複数の歯からなる歯部を有し、
前記複数の歯は、隣り合う前記歯とのピッチが前記歯部の基端部側よりも先端部側のほうが細かくなるように、形成されている請求項1に記載の超音波処置具。 - 前記ピッチは、0.1mm〜1mmである請求項5に記載の超音波処置具。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US30371510P | 2010-02-12 | 2010-02-12 | |
| US61/303,715 | 2010-02-12 | ||
| PCT/JP2011/052907WO2011099571A1 (ja) | 2010-02-12 | 2011-02-10 | 超音波処置具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4976597B2true JP4976597B2 (ja) | 2012-07-18 |
| JPWO2011099571A1 JPWO2011099571A1 (ja) | 2013-06-17 |
Family
ID=44367841
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011553895AActiveJP4976597B2 (ja) | 2010-02-12 | 2011-02-10 | 超音波処置具 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8518067B2 (ja) |
| EP (1) | EP2484301B1 (ja) |
| JP (1) | JP4976597B2 (ja) |
| CN (1) | CN102639075B (ja) |
| WO (1) | WO2011099571A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015137139A1 (ja)* | 2014-03-14 | 2015-09-17 | オリンパス株式会社 | 把持ユニット及びバイポーラ処置具 |
Families Citing this family (141)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11229472B2 (en) | 2001-06-12 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with multiple magnetic position sensors |
| US8182501B2 (en) | 2004-02-27 | 2012-05-22 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical shears and method for sealing a blood vessel using same |
| US20060079879A1 (en) | 2004-10-08 | 2006-04-13 | Faller Craig N | Actuation mechanism for use with an ultrasonic surgical instrument |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US7621930B2 (en) | 2006-01-20 | 2009-11-24 | Ethicon Endo-Surgery, Inc. | Ultrasound medical instrument having a medical ultrasonic blade |
| US8142461B2 (en) | 2007-03-22 | 2012-03-27 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| US8911460B2 (en) | 2007-03-22 | 2014-12-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8808319B2 (en) | 2007-07-27 | 2014-08-19 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8523889B2 (en) | 2007-07-27 | 2013-09-03 | Ethicon Endo-Surgery, Inc. | Ultrasonic end effectors with increased active length |
| US9044261B2 (en) | 2007-07-31 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Temperature controlled ultrasonic surgical instruments |
| US8430898B2 (en) | 2007-07-31 | 2013-04-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8512365B2 (en) | 2007-07-31 | 2013-08-20 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| EP2217157A2 (en) | 2007-10-05 | 2010-08-18 | Ethicon Endo-Surgery, Inc. | Ergonomic surgical instruments |
| US10010339B2 (en) | 2007-11-30 | 2018-07-03 | Ethicon Llc | Ultrasonic surgical blades |
| US9089360B2 (en) | 2008-08-06 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Devices and techniques for cutting and coagulating tissue |
| US9700339B2 (en) | 2009-05-20 | 2017-07-11 | Ethicon Endo-Surgery, Inc. | Coupling arrangements and methods for attaching tools to ultrasonic surgical instruments |
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US9050093B2 (en) | 2009-10-09 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US10441345B2 (en) | 2009-10-09 | 2019-10-15 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US8469981B2 (en) | 2010-02-11 | 2013-06-25 | Ethicon Endo-Surgery, Inc. | Rotatable cutting implement arrangements for ultrasonic surgical instruments |
| US8486096B2 (en) | 2010-02-11 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Dual purpose surgical instrument for cutting and coagulating tissue |
| US8951272B2 (en) | 2010-02-11 | 2015-02-10 | Ethicon Endo-Surgery, Inc. | Seal arrangements for ultrasonically powered surgical instruments |
| US8795327B2 (en) | 2010-07-22 | 2014-08-05 | Ethicon Endo-Surgery, Inc. | Electrosurgical instrument with separate closure and cutting members |
| US9192431B2 (en) | 2010-07-23 | 2015-11-24 | Ethicon Endo-Surgery, Inc. | Electrosurgical cutting and sealing instrument |
| US9259265B2 (en) | 2011-07-22 | 2016-02-16 | Ethicon Endo-Surgery, Llc | Surgical instruments for tensioning tissue |
| EP2810612B1 (en) | 2012-02-01 | 2016-09-14 | Olympus Corporation | Grasping treatment device |
| WO2013119545A1 (en) | 2012-02-10 | 2013-08-15 | Ethicon-Endo Surgery, Inc. | Robotically controlled surgical instrument |
| CN104010584B (zh)* | 2012-03-19 | 2017-03-01 | 奥林巴斯株式会社 | 把持处理装置 |
| US9439668B2 (en) | 2012-04-09 | 2016-09-13 | Ethicon Endo-Surgery, Llc | Switch arrangements for ultrasonic surgical instruments |
| US20140005705A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulating shafts |
| US9226767B2 (en) | 2012-06-29 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Closed feedback control for electrosurgical device |
| US9351754B2 (en) | 2012-06-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| US9820768B2 (en) | 2012-06-29 | 2017-11-21 | Ethicon Llc | Ultrasonic surgical instruments with control mechanisms |
| US9326788B2 (en) | 2012-06-29 | 2016-05-03 | Ethicon Endo-Surgery, Llc | Lockout mechanism for use with robotic electrosurgical device |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US20140005702A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with distally positioned transducers |
| US9198714B2 (en) | 2012-06-29 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Haptic feedback devices for surgical robot |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| EP2900158B1 (en) | 2012-09-28 | 2020-04-15 | Ethicon LLC | Multi-function bi-polar forceps |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
| US20140135804A1 (en)* | 2012-11-15 | 2014-05-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic and electrosurgical devices |
| US10226273B2 (en) | 2013-03-14 | 2019-03-12 | Ethicon Llc | Mechanical fasteners for use with surgical energy devices |
| WO2014196641A1 (ja)* | 2013-06-07 | 2014-12-11 | オリンパスメディカルシステムズ株式会社 | 把持処置装置 |
| EP3031417B8 (en) | 2013-08-07 | 2022-05-25 | Olympus Corporation | Ultrasonic probe and ultrasonic treatment apparatus |
| US9814514B2 (en) | 2013-09-13 | 2017-11-14 | Ethicon Llc | Electrosurgical (RF) medical instruments for cutting and coagulating tissue |
| US9265926B2 (en) | 2013-11-08 | 2016-02-23 | Ethicon Endo-Surgery, Llc | Electrosurgical devices |
| US9901358B2 (en)* | 2013-11-15 | 2018-02-27 | Ethicon Llc | Ultrasonic surgical instrument with integral blade cleaning feature |
| US9949785B2 (en) | 2013-11-21 | 2018-04-24 | Ethicon Llc | Ultrasonic surgical instrument with electrosurgical feature |
| US9943325B2 (en) | 2013-11-26 | 2018-04-17 | Ethicon Llc | Handpiece and blade configurations for ultrasonic surgical instrument |
| GB2521229A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| GB2521228A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| US9795436B2 (en) | 2014-01-07 | 2017-10-24 | Ethicon Llc | Harvesting energy from a surgical generator |
| US9554854B2 (en) | 2014-03-18 | 2017-01-31 | Ethicon Endo-Surgery, Llc | Detecting short circuits in electrosurgical medical devices |
| US10092310B2 (en) | 2014-03-27 | 2018-10-09 | Ethicon Llc | Electrosurgical devices |
| US10463421B2 (en) | 2014-03-27 | 2019-11-05 | Ethicon Llc | Two stage trigger, clamp and cut bipolar vessel sealer |
| US9737355B2 (en) | 2014-03-31 | 2017-08-22 | Ethicon Llc | Controlling impedance rise in electrosurgical medical devices |
| US9913680B2 (en) | 2014-04-15 | 2018-03-13 | Ethicon Llc | Software algorithms for electrosurgical instruments |
| JP5959769B2 (ja)* | 2014-05-23 | 2016-08-02 | オリンパス株式会社 | 処置具 |
| JP6735272B2 (ja)* | 2014-05-30 | 2020-08-05 | アプライド メディカル リソーシーズ コーポレイション | 電気外科的密封・切開システム |
| CN106535799B (zh)* | 2014-07-15 | 2019-06-18 | 奥林巴斯株式会社 | 送液器具及处置装置 |
| US10285724B2 (en) | 2014-07-31 | 2019-05-14 | Ethicon Llc | Actuation mechanisms and load adjustment assemblies for surgical instruments |
| US10639092B2 (en) | 2014-12-08 | 2020-05-05 | Ethicon Llc | Electrode configurations for surgical instruments |
| US10245095B2 (en) | 2015-02-06 | 2019-04-02 | Ethicon Llc | Electrosurgical instrument with rotation and articulation mechanisms |
| US10342602B2 (en) | 2015-03-17 | 2019-07-09 | Ethicon Llc | Managing tissue treatment |
| US10321950B2 (en) | 2015-03-17 | 2019-06-18 | Ethicon Llc | Managing tissue treatment |
| US10595929B2 (en) | 2015-03-24 | 2020-03-24 | Ethicon Llc | Surgical instruments with firing system overload protection mechanisms |
| US11020140B2 (en) | 2015-06-17 | 2021-06-01 | Cilag Gmbh International | Ultrasonic surgical blade for use with ultrasonic surgical instruments |
| US10357303B2 (en) | 2015-06-30 | 2019-07-23 | Ethicon Llc | Translatable outer tube for sealing using shielded lap chole dissector |
| US11141213B2 (en) | 2015-06-30 | 2021-10-12 | Cilag Gmbh International | Surgical instrument with user adaptable techniques |
| US10898256B2 (en) | 2015-06-30 | 2021-01-26 | Ethicon Llc | Surgical system with user adaptable techniques based on tissue impedance |
| US11129669B2 (en) | 2015-06-30 | 2021-09-28 | Cilag Gmbh International | Surgical system with user adaptable techniques based on tissue type |
| US10034704B2 (en) | 2015-06-30 | 2018-07-31 | Ethicon Llc | Surgical instrument with user adaptable algorithms |
| US11051873B2 (en) | 2015-06-30 | 2021-07-06 | Cilag Gmbh International | Surgical system with user adaptable techniques employing multiple energy modalities based on tissue parameters |
| US10154852B2 (en) | 2015-07-01 | 2018-12-18 | Ethicon Llc | Ultrasonic surgical blade with improved cutting and coagulation features |
| EP3718494B1 (en) | 2015-08-12 | 2022-11-16 | Reach Surgical, Inc. | Curved ultrasonic surgical blade |
| US10194973B2 (en) | 2015-09-30 | 2019-02-05 | Ethicon Llc | Generator for digitally generating electrical signal waveforms for electrosurgical and ultrasonic surgical instruments |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| US10179022B2 (en) | 2015-12-30 | 2019-01-15 | Ethicon Llc | Jaw position impedance limiter for electrosurgical instrument |
| US10575892B2 (en) | 2015-12-31 | 2020-03-03 | Ethicon Llc | Adapter for electrical surgical instruments |
| US10716615B2 (en) | 2016-01-15 | 2020-07-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with curved end effectors having asymmetric engagement between jaw and blade |
| US11129670B2 (en) | 2016-01-15 | 2021-09-28 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US12193698B2 (en) | 2016-01-15 | 2025-01-14 | Cilag Gmbh International | Method for self-diagnosing operation of a control switch in a surgical instrument system |
| US11051840B2 (en) | 2016-01-15 | 2021-07-06 | Ethicon Llc | Modular battery powered handheld surgical instrument with reusable asymmetric handle housing |
| US10555769B2 (en) | 2016-02-22 | 2020-02-11 | Ethicon Llc | Flexible circuits for electrosurgical instrument |
| US10646269B2 (en) | 2016-04-29 | 2020-05-12 | Ethicon Llc | Non-linear jaw gap for electrosurgical instruments |
| US10485607B2 (en) | 2016-04-29 | 2019-11-26 | Ethicon Llc | Jaw structure with distal closure for electrosurgical instruments |
| US10702329B2 (en) | 2016-04-29 | 2020-07-07 | Ethicon Llc | Jaw structure with distal post for electrosurgical instruments |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| US10245064B2 (en) | 2016-07-12 | 2019-04-02 | Ethicon Llc | Ultrasonic surgical instrument with piezoelectric central lumen transducer |
| US10893883B2 (en) | 2016-07-13 | 2021-01-19 | Ethicon Llc | Ultrasonic assembly for use with ultrasonic surgical instruments |
| WO2018011918A1 (ja) | 2016-07-13 | 2018-01-18 | オリンパス株式会社 | 把持処置具 |
| US10842522B2 (en) | 2016-07-15 | 2020-11-24 | Ethicon Llc | Ultrasonic surgical instruments having offset blades |
| US10376305B2 (en) | 2016-08-05 | 2019-08-13 | Ethicon Llc | Methods and systems for advanced harmonic energy |
| US10285723B2 (en) | 2016-08-09 | 2019-05-14 | Ethicon Llc | Ultrasonic surgical blade with improved heel portion |
| USD847990S1 (en) | 2016-08-16 | 2019-05-07 | Ethicon Llc | Surgical instrument |
| US10952759B2 (en) | 2016-08-25 | 2021-03-23 | Ethicon Llc | Tissue loading of a surgical instrument |
| US10736649B2 (en) | 2016-08-25 | 2020-08-11 | Ethicon Llc | Electrical and thermal connections for ultrasonic transducer |
| US10987124B2 (en) | 2016-11-22 | 2021-04-27 | Covidien Lp | Surgical instruments and jaw members thereof |
| US10603064B2 (en) | 2016-11-28 | 2020-03-31 | Ethicon Llc | Ultrasonic transducer |
| US11266430B2 (en) | 2016-11-29 | 2022-03-08 | Cilag Gmbh International | End effector control and calibration |
| WO2018134908A1 (ja)* | 2017-01-18 | 2018-07-26 | オリンパス株式会社 | 処置具 |
| US10932807B2 (en) | 2017-02-08 | 2021-03-02 | Covidien Lp | Assembly tool for ultrasonic surgical instruments and kits and methods including the same |
| US10820920B2 (en) | 2017-07-05 | 2020-11-03 | Ethicon Llc | Reusable ultrasonic medical devices and methods of their use |
| US11076910B2 (en) | 2018-01-22 | 2021-08-03 | Covidien Lp | Jaw members for surgical instruments and surgical instruments incorporating the same |
| WO2019224956A1 (ja)* | 2018-05-23 | 2019-11-28 | オリンパス株式会社 | 処置具のアセンブリ方法、及び樹脂パッド |
| WO2020016974A1 (ja)* | 2018-07-18 | 2020-01-23 | オリンパス株式会社 | 処置具 |
| US12336747B2 (en) | 2019-12-30 | 2025-06-24 | Cilag Gmbh International | Method of operating a combination ultrasonic / bipolar RF surgical device with a combination energy modality end-effector |
| US12114912B2 (en) | 2019-12-30 | 2024-10-15 | Cilag Gmbh International | Non-biased deflectable electrode to minimize contact between ultrasonic blade and electrode |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US12082808B2 (en) | 2019-12-30 | 2024-09-10 | Cilag Gmbh International | Surgical instrument comprising a control system responsive to software configurations |
| US12023086B2 (en) | 2019-12-30 | 2024-07-02 | Cilag Gmbh International | Electrosurgical instrument for delivering blended energy modalities to tissue |
| US12262937B2 (en) | 2019-12-30 | 2025-04-01 | Cilag Gmbh International | User interface for surgical instrument with combination energy modality end-effector |
| US20210196357A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with asynchronous energizing electrodes |
| US11452525B2 (en) | 2019-12-30 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising an adjustment system |
| US12343063B2 (en) | 2019-12-30 | 2025-07-01 | Cilag Gmbh International | Multi-layer clamp arm pad for enhanced versatility and performance of a surgical device |
| US11684412B2 (en) | 2019-12-30 | 2023-06-27 | Cilag Gmbh International | Surgical instrument with rotatable and articulatable surgical end effector |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US11911063B2 (en) | 2019-12-30 | 2024-02-27 | Cilag Gmbh International | Techniques for detecting ultrasonic blade to electrode contact and reducing power to ultrasonic blade |
| US11786294B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Control program for modular combination energy device |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US12076006B2 (en) | 2019-12-30 | 2024-09-03 | Cilag Gmbh International | Surgical instrument comprising an orientation detection system |
| US11937866B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Method for an electrosurgical procedure |
| US12053224B2 (en) | 2019-12-30 | 2024-08-06 | Cilag Gmbh International | Variation in electrode parameters and deflectable electrode to modify energy density and tissue interaction |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US20210196362A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical end effectors with thermally insulative and thermally conductive portions |
| US11986201B2 (en) | 2019-12-30 | 2024-05-21 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US12064109B2 (en) | 2019-12-30 | 2024-08-20 | Cilag Gmbh International | Surgical instrument comprising a feedback control circuit |
| WO2021152753A1 (ja)* | 2020-01-29 | 2021-08-05 | オリンパス株式会社 | 処置具、及び処置具の製造方法 |
| US20230129956A1 (en)* | 2020-04-08 | 2023-04-27 | Covidien Lp | Surgical instruments and methods incorporating ultrasonic and electrosurgical functionality |
| US20220265307A1 (en)* | 2021-02-23 | 2022-08-25 | Olympus Medical Systems Corp. | Ultrasonic treatment devices |
| US20240180578A1 (en)* | 2021-03-17 | 2024-06-06 | Covidien Lp | Ultrasonic surgical instruments and systems incorporating enhanced grasping functionality |
| CN114404028B (zh)* | 2022-01-22 | 2023-06-30 | 邦士医疗科技股份有限公司 | 一种双极等离子超声手术刀 |
| WO2025074944A1 (ja)* | 2023-10-02 | 2025-04-10 | オリンパスメディカルシステムズ株式会社 | 超音波処置具 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008272393A (ja)* | 2007-04-25 | 2008-11-13 | River Seiko:Kk | 内視鏡用モノポーラ型高周波鋏 |
| JP2009082711A (ja)* | 2007-09-28 | 2009-04-23 | Olympus Medical Systems Corp | 外科手術装置 |
| JP2010005460A (ja)* | 2002-05-13 | 2010-01-14 | Axya Medical Inc | 柔組織の切断及び凝固のための超音波システム |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE68924692T2 (de)* | 1988-11-11 | 1996-04-25 | United States Surgical Corp | Chirurgisches Instrument. |
| US5413268A (en)* | 1989-05-26 | 1995-05-09 | United States Surgical Corporation | Apparatus and method for placing stables in laparoscopic or endoscopic procedures |
| US5217460A (en)* | 1991-03-22 | 1993-06-08 | Knoepfler Dennis J | Multiple purpose forceps |
| US5322055B1 (en)* | 1993-01-27 | 1997-10-14 | Ultracision Inc | Clamp coagulator/cutting system for ultrasonic surgical instruments |
| US5397324A (en)* | 1993-03-10 | 1995-03-14 | Carroll; Brendan J. | Surgical stapler instrument and method for vascular hemostasis |
| AU4603697A (en)* | 1996-10-04 | 1998-04-24 | United States Surgical Corporation | Ultrasonic dissection and coagulation system |
| US6024750A (en)* | 1997-08-14 | 2000-02-15 | United States Surgical | Ultrasonic curved blade |
| US20040097911A1 (en)* | 2001-02-13 | 2004-05-20 | Olympus Optical Co., Ltd. | Ultrasonic operating apparartus and tool for changing tip thereof |
| JP4109096B2 (ja)* | 2002-01-11 | 2008-06-25 | オリンパス株式会社 | 超音波処置具 |
| WO2004012615A1 (ja)* | 2002-08-02 | 2004-02-12 | Olympus Corporation | 超音波処置具 |
| US20040243151A1 (en)* | 2003-04-29 | 2004-12-02 | Demmy Todd L. | Surgical stapling device with dissecting tip |
| CA2529740C (en)* | 2003-06-17 | 2013-12-24 | Ethicon Endo-Surgery, Inc. | Hand activated ultrasonic instrument |
| JP4253540B2 (ja)* | 2003-07-24 | 2009-04-15 | オリンパス株式会社 | 医療器械 |
| US7442193B2 (en)* | 2003-11-20 | 2008-10-28 | Covidien Ag | Electrically conductive/insulative over-shoe for tissue fusion |
| JP4727575B2 (ja)* | 2004-06-15 | 2011-07-20 | オリンパス株式会社 | エネルギー処置具 |
| US20060079879A1 (en)* | 2004-10-08 | 2006-04-13 | Faller Craig N | Actuation mechanism for use with an ultrasonic surgical instrument |
| US8366727B2 (en)* | 2006-06-01 | 2013-02-05 | Ethicon Endo-Surgery, Inc. | Tissue pad ultrasonic surgical instrument |
| US20080015575A1 (en)* | 2006-07-14 | 2008-01-17 | Sherwood Services Ag | Vessel sealing instrument with pre-heated electrodes |
| US7766929B2 (en) | 2007-09-28 | 2010-08-03 | Olympus Medical Systems Corp. | Surgical operating apparatus |
- 2011
- 2011-02-10JPJP2011553895Apatent/JP4976597B2/jaactiveActive
- 2011-02-10CNCN201180004735.6Apatent/CN102639075B/zhactiveActive
- 2011-02-10EPEP11742314.5Apatent/EP2484301B1/enactiveActive
- 2011-02-10WOPCT/JP2011/052907patent/WO2011099571A1/jaactiveApplication Filing
- 2012
- 2012-01-23USUS13/355,681patent/US8518067B2/enactiveActive
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010005460A (ja)* | 2002-05-13 | 2010-01-14 | Axya Medical Inc | 柔組織の切断及び凝固のための超音波システム |
| JP2008272393A (ja)* | 2007-04-25 | 2008-11-13 | River Seiko:Kk | 内視鏡用モノポーラ型高周波鋏 |
| JP2009082711A (ja)* | 2007-09-28 | 2009-04-23 | Olympus Medical Systems Corp | 外科手術装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015137139A1 (ja)* | 2014-03-14 | 2015-09-17 | オリンパス株式会社 | 把持ユニット及びバイポーラ処置具 |
| JP5989275B2 (ja)* | 2014-03-14 | 2016-09-07 | オリンパス株式会社 | 把持ユニット及びバイポーラ処置具 |
| US9872726B2 (en) | 2014-03-14 | 2018-01-23 | Olympus Corporation | Gripping unit and bipolar treatment instrument |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2484301A4 (en) | 2012-10-17 |
| JPWO2011099571A1 (ja) | 2013-06-17 |
| EP2484301A1 (en) | 2012-08-08 |
| US20120277778A1 (en) | 2012-11-01 |
| EP2484301B1 (en) | 2016-06-15 |
| CN102639075B (zh) | 2014-10-22 |
| CN102639075A (zh) | 2012-08-15 |
| US8518067B2 (en) | 2013-08-27 |
| WO2011099571A1 (ja) | 2011-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4976597B2 (ja) | 超音波処置具 | |
| JP4388475B2 (ja) | 超音波処置具 | |
| CN101371797B (zh) | 外科用手术装置 | |
| JP4291202B2 (ja) | 超音波処置具 | |
| JP4157574B2 (ja) | 外科用処置具 | |
| CN101569549B (zh) | 外科手术装置 | |
| US8328834B2 (en) | Ultrasonic device for cutting and coagulating | |
| JP4980363B2 (ja) | 切断および凝固のための超音波装置 | |
| CN101467917B (zh) | 外科手术装置 | |
| JP3600070B2 (ja) | 超音波処置具 | |
| JP3537387B2 (ja) | 超音波処置具 | |
| JP2000000249A (ja) | 超音波処置具 | |
| JPH105236A (ja) | 超音波処置具 | |
| JP2005278935A (ja) | 超音波処置装置 | |
| JPH11178833A (ja) | 超音波処置具 | |
| JP2009240773A (ja) | 外科手術装置 | |
| CN109475363B (zh) | 把持处置器具和制造方法 | |
| JP2000254138A (ja) | 超音波凝固切開装置 | |
| JP4436556B2 (ja) | 外科手術用超音波処置具 | |
| US12167851B2 (en) | Treatment instrument | |
| JP3791875B2 (ja) | 超音波処置具 | |
| JPH105238A (ja) | 超音波処置具 | |
| JP2006110388A (ja) | 超音波切開凝固装置 | |
| WO2013042515A1 (ja) | 超音波処置具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20120313 | |
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20120412 | |
| R151 | Written notification of patent or utility model registration | Ref document number:4976597 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R151 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20150420 Year of fee payment:3 | |
| S111 | Request for change of ownership or part of ownership | Free format text:JAPANESE INTERMEDIATE CODE: R313111 | |
| R350 | Written notification of registration of transfer | Free format text:JAPANESE INTERMEDIATE CODE: R350 | |
| S531 | Written request for registration of change of domicile | Free format text:JAPANESE INTERMEDIATE CODE: R313531 | |
| R350 | Written notification of registration of transfer | Free format text:JAPANESE INTERMEDIATE CODE: R350 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 |