JP4874838B2 - Rough terrain vehicle - Google Patents
Rough terrain vehicleDownload PDFInfo
- Publication number
- JP4874838B2 JP4874838B2JP2007056047AJP2007056047AJP4874838B2JP 4874838 B2JP4874838 B2JP 4874838B2JP 2007056047 AJP2007056047 AJP 2007056047AJP 2007056047 AJP2007056047 AJP 2007056047AJP 4874838 B2JP4874838 B2JP 4874838B2
- Authority
- JP
- Japan
- Prior art keywords
- running
- traveling
- foot
- frames
- end side
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 210000002414legAnatomy0.000claimsdescription94
- 210000002683footAnatomy0.000claimsdescription62
- 210000004394hip jointAnatomy0.000claimsdescription36
- 210000003108foot jointAnatomy0.000claimsdescription31
- 210000000544articulatio talocruralisAnatomy0.000claimsdescription29
- 230000007246mechanismEffects0.000claimsdescription14
- 230000003028elevating effectEffects0.000claimsdescription3
- 210000001624hipAnatomy0.000claimsdescription3
- 210000000629knee jointAnatomy0.000description17
- 210000000689upper legAnatomy0.000description17
- 230000036544postureEffects0.000description13
- 210000001226toe jointAnatomy0.000description11
- 230000005484gravityEffects0.000description7
- 238000001514detection methodMethods0.000description5
- 238000010586diagramMethods0.000description3
- 239000003921oilSubstances0.000description3
- 241000195493CryptophytaSpecies0.000description1
- 210000003423ankleAnatomy0.000description1
- 238000005452bendingMethods0.000description1
- 238000006073displacement reactionMethods0.000description1
- 239000010720hydraulic oilSubstances0.000description1
- 238000009434installationMethods0.000description1
- 210000003127kneeAnatomy0.000description1
- 238000000034methodMethods0.000description1
- 229920003051synthetic elastomerPolymers0.000description1
- 239000005061synthetic rubberSubstances0.000description1
- 230000009466transformationEffects0.000description1
- XLYOFNOQVPJJNP-UHFFFAOYSA-NwaterSubstancesOXLYOFNOQVPJJNP-UHFFFAOYSA-N0.000description1
Images

















Landscapes
- Manipulator (AREA)
- Body Structure For Vehicles (AREA)
Description
Translated fromJapanese本発明は、山林で伐採した材木を運搬する運搬車又は水辺の藻を刈取る作業車等の不整地用走行車両に係り、より詳しくは、走行部に左右の脚体を介して前記作業機体を支持する不整地用走行車両に関するものである。 The present invention relates to a traveling vehicle for rough terrain, such as a transport vehicle for transporting timber cut down in a forest or a work vehicle for cutting waterside algae, and more specifically, the working machine body via left and right legs on a traveling portion. The present invention relates to a traveling vehicle for rough terrain that supports the vehicle.
この種の不整地用走行車両は、特許文献1に示されているように、左右の前側走行部と、左右の後側走行部とを備え、左右の前側走行部及び左右の後側走行部にリンク機構を介してボディ(作業機体)を支持させていた。また、オペレータ等が搭乗する運転キャビン(作業機体)を水平に保持する技術も公知である(特許文献2参照)。
ところで、特許文献1又は特許文献2のように、フレームによって左右及び前後の走行部が連結されている場合、左の走行部又は右の走行部の前後方向の接地幅を簡単に変更できないから、路面抵抗が大きい場所での旋回抵抗を簡単に低減できない等の問題がある。また、前後の走行部を個別に上下動できないから、走行部の旋回抵抗を低減しながら、走行部の接地圧を簡単に確保できない等の問題がある。また、機体重心を前後方向に移動しながら、前後の走行部の接地圧を低減できないから、前後の走行部のいずれか一方を地上に持上げて、左右の前側走行部又は左右の後側走行部だけで移動することができない等の問題がある。 By the way, as in
本発明の目的は、左右の前側走行部及び左右の後側走行部の旋回抵抗を簡単に低減できるものでありながら、走行部の接地圧を簡単に確保でき、且つ左右の前側走行部又は左右の後側走行部だけで移動できるようにした不整地用走行車両を提供するものである。 It is an object of the present invention to easily reduce the turning resistance of the left and right front running units and the left and right rear running units, while easily ensuring the ground pressure of the running unit, and to detect the left and right front running units or the left and right running units. The present invention provides a rough terrain vehicle that can be moved only by a rear traveling part.
前記目的を達成するため、請求項1に係る発明の不整地用走行車両は、左右の前側走行部と、左右の後側走行部と、駆動源及び作業機を配置する作業機体と、前記前側走行部及び後側走行部に前記作業機体を支持する左右の脚体とを備え、左右の脚体を屈曲可能に構成してなる不整地用走行車両において、前記左右の脚体の下端側に、左右の前側足関節軸及び左右の後側足関節軸を介して、左右の前側走行部の後端側及び左右の後側走行部の前端側を連結し、左右の前側走行部の前端側及び左右の後側走行部の後端側が、左右の前側足関節軸及び左右の後側足関節軸回りに上下動するように構成する一方、前記左右の脚体の上端側に前記作業機体を回動可能に連結する股関節軸を備え、前記股関節軸の軸芯回りに前記作業機体を回動して水平姿勢に維持可能に構成し、前記作業機体に対して前記左右の脚体の相対連結角度を変更する左右の股関節油圧シリンダと、前記作業機体の前後方向の傾斜角を変更するピッチ油圧シリンダとを備え、前記左右の股関節油圧シリンダによって前記股関節軸回りに前記左右の脚体を回動可能に構成し、前記ピッチ油圧シリンダによって前記股関節軸回りに前記作業機体を回動可能に構成したものである。In order to achieve the above object, the rough terrain vehicle of the invention according to
請求項2に記載の発明は、請求項1に記載の不整地用走行車両において、前記左右の前側走行部の前端側を前記左右の前側足関節軸回りに上下動する左右の前側昇降機構と、前記左右の後側走行部の後端側を前記左右の後側足関節軸回りに上下動する左右の後側昇降機構とを備えたものである。 According to a second aspect of the present invention, in the rough terrain vehicle according to the first aspect, the left and right front lifting mechanisms that vertically move the front end sides of the left and right front traveling portions around the left and right front ankle joint axes; And a left and right rear elevating mechanism for moving the rear end side of the left and right rear running parts up and down around the left and right rear ankle joint axes.
請求項3に記載の発明は、請求項1に記載の不整地用走行車両において、前記左右の脚体は、前記左右の前側走行部を支持する左右の前側足フレームと、前記左右の後側走行部を支持する左右の後側足フレームとを有し、前記左右の前側足フレームに前記左右の前側足関節軸を介して左右の足根フレームを連結し、前記左右の後側足フレームに前記左右の後側足関節軸を介して前記左右の足根フレームを連結したものである。 According to a third aspect of the present invention, in the traveling vehicle for rough terrain according to the first aspect, the left and right legs include left and right front foot frames that support the left and right front traveling portions, and the left and right rear sides. Left and right rear foot frames that support the traveling portion, and the left and right foot frames are connected to the left and right front foot frames via the left and right front foot joint axes, and the left and right rear foot frames The left and right foot frame is connected via the left and right rear foot joint axes.
請求項1に係る発明によれば、左右の前側走行部と、左右の後側走行部と、駆動源及び作業機を配置する作業機体と、前記前側走行部及び後側走行部に前記作業機体を支持する左右の脚体とを備え、左右の脚体を屈曲可能に構成してなる不整地用走行車両において、前記左右の脚体の下端側に、左右の前側足関節軸及び左右の後側足関節軸を介して、左右の前側走行部の後端側及び左右の後側走行部の前端側を連結し、左右の前側走行部の前端側及び左右の後側走行部の後端側が、左右の前側足関節軸及び左右の後側足関節軸回りに上下動するように構成する一方、前記左右の脚体の上端側に前記作業機体を回動可能に連結する股関節軸を備え、前記股関節軸の軸芯回りに前記作業機体を回動して水平姿勢に維持可能に構成し、前記作業機体に対して前記左右の脚体の相対連結角度を変更する左右の股関節油圧シリンダと、前記作業機体の前後方向の傾斜角を変更するピッチ油圧シリンダとを備え、前記左右の股関節油圧シリンダによって前記股関節軸回りに前記左右の脚体を回動可能に構成し、前記ピッチ油圧シリンダによって前記股関節軸回りに前記作業機体を回動可能に構成したものであるから、左の走行部又は右の走行部の前後方向の接地幅を変更して、路面抵抗が大きい場所での旋回抵抗を簡単に低減できる。軟弱路面の移動において、走行部の前後方向の接地幅を長くして接地圧を低減でき、且つ旋回抵抗が大きくなる場所では、走行部の前後方向の接地幅を短くして旋回抵抗を低減でき、不整地での走行性能を向上できるものである。According to the first aspect of the present invention, the left and right front traveling parts, the left and right rear traveling parts, the work machine body in which the drive source and the work machine are disposed, and the work machine body in the front running part and the rear running part. In a rough terrain vehicle comprising left and right legs that support the left and right legs, the right and left front ankle joint shafts and the left and right rear legs are disposed at the lower ends of the left and right legs. The rear end side of the left and right front running parts and the front end side of the left and right rear running parts are connected via the side foot joint shaft, and the front end side of the left and right front running parts and the rear end side of the left and right rear running parts areA hip joint shaft that is configuredto move up and down around the left and right front foot joint axes and the left and right rear foot joint shafts,and rotatably connects the work machine body to the upper end side of the left and right legs, The work machine body is configured to be able to rotate around the axis of the hip joint axis and maintain a horizontal posture. Left and right hip hydraulic cylinders for changing the relative connecting angle of the left and right legs, and a pitch hydraulic cylinder for changing the tilt angle in the front-rear direction of the work machine body. The left and right legs are configured to be rotatable about the hip joint axis, and the work machine body is configured tobe rotatable about the hip joint axis by the pitch hydraulic cylinder. By changing the ground contact width in the front-rear direction, it is possible to easily reduce the turning resistance in a place where the road surface resistance is large. When moving on soft roads, the ground contact width in the front-rear direction of the traveling part can be increased to reduce the ground pressure, and in places where the turning resistance increases, the grounding width in the front-rear direction of the traveling part can be shortened to reduce the turning resistance. The driving performance on rough terrain can be improved.
請求項2に係る発明によれば、前記左右の前側走行部の前端側を前記左右の前側足関節軸回りに上下動する左右の前側昇降機構と、前記左右の後側走行部の後端側を前記左右の後側足関節軸回りに上下動する左右の後側昇降機構とを備えたものであるから、前後の走行部を個別に上下動でき、走行部の旋回抵抗を低減しながら、走行部の接地圧を簡単に確保できるものである。 According to the second aspect of the present invention, the left and right front elevating mechanisms that vertically move the front end sides of the left and right front running portions around the left and right front ankle joint axes, and the rear end sides of the left and right rear running portions With the left and right rear lifting mechanisms that move up and down around the left and right rear foot joint axes, the front and rear traveling parts can be individually moved up and down while reducing the turning resistance of the traveling part, The ground pressure of the traveling part can be easily secured.
請求項3に係る発明によれば、前記左右の脚体は、前記左右の前側走行部を支持する左右の前側足フレームと、前記左右の後側走行部を支持する左右の後側足フレームとを有し、前記左右の前側足フレームに前記左右の前側足関節軸を介して左右の足根フレームを連結し、前記左右の後側足フレームに前記左右の後側足関節軸を介して前記左右の足根フレームを連結したものであるから、機体重心を前後方向に移動しながら、前記左右の前側走行部又は前記左右の後側走行部の少なくともいずれか一方又は両方の接地圧を簡単に低減できる。前記左右の前側走行部又は前記左右の後側走行部のいずれか一方を地上に持上げた状態で、左右の前側走行部又は左右の後側走行部のいずれか他方だけを利用して移動することができるものである。 According to a third aspect of the present invention, the left and right legs include left and right front foot frames that support the left and right front running portions, and left and right rear foot frames that support the left and right rear running portions. The left and right foot frames are connected to the left and right front foot frames via the left and right front foot joint axes, and the left and right rear foot frames are connected to the left and right rear foot joint shafts via the left and right rear foot joint shafts. Since the left and right foot frames are connected, the ground pressure of at least one or both of the left and right front running parts and the left and right rear running parts can be easily changed while moving the center of gravity of the aircraft in the front-rear direction. Can be reduced. With either one of the left and right front running units or the left and right rear running units lifted to the ground, the vehicle uses only the other of the left and right front running units or the left and right rear running units. It is something that can be done.
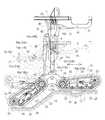
以下、本発明の実施の形態を、不整地用走行車両としての材木運搬車に適用した場合の図面について説明する。図1は材木運搬車の斜視図、図2は材木運搬車1の側面図、図3は同平面図、図4は後側走行部2a,2b及び前側走行部3a,3bの斜視図、図5は脚体5a,5bの側面図、図6は左右の脚体5a,5bを上方から視た斜視図、図7は左右の脚体5a,5bを下方から視た斜視図である。なお、以下の説明では、材木運搬車1の前進方向に向かって左側を単に左側と称し、同じく前進方向に向かって右側を単に右側と称する。 DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS Hereinafter, drawings when an embodiment of the present invention is applied to a timber transport vehicle as a rough terrain vehicle will be described. 1 is a perspective view of a timber transporter, FIG. 2 is a side view of the
図1乃至図3に示されるように、材木運搬車1は、左右の後側走行部2a,2bと、左右の前側走行部3a,3bと、後述する駆動源としてのエンジン20、油圧機器21、及び作業機としての丸太握持アーム22等を配置する作業機体4と、後側走行部2a,2b及び前側走行部3a,3bに作業機体4を支持する左右の脚体5a,5bとを備えている。 As shown in FIGS. 1 to 3, the
図2に示されるように、作業機体4には、オペレータが搭乗する運転キャビン23と、丸太扼持アーム22によって丸太24を載せる荷台25とを備える。運転キャビン23は、オペレータが座乗する操縦座席26と、左の前側走行部2a及び後側走行部3aと右の前側走行部2b及び後側走行部3bとを差動させて進路を変更操作(舵取り)する操縦ハンドル27と、左右の後側走行部2a,2b及び左右の前側走行部3a,3bの駆動速度の変更(車速の変速)と回転方向の変更(前進と後進の切換)とを操作する走行変速レバー28と、左右の後側走行部2a,2b又は左右の前側走行部3a,3bを制動操作するブレーキペダル29とを有する。また、運転キャビン23内の設置台98に遠隔操縦器99を取外し可能に配置する。材木運搬車1は、主として遠隔操縦器99によって操縦して、材木の積み下ろし及び運搬等の作業を実行するが、オペレータが操縦座席26に座乗して材木を積み下ろしたり運搬できるように構成している。 As shown in FIG. 2, the
図3及び図4に示されるように、左右の後側走行部2a,2b及び左右の前側走行部3a,3bは、複数のトラックローラ30を軸支したトラックフレーム31と、トラックフレーム31に回動可能に配置した駆動スプロケット32と、トラックフレーム31にテンション調節機構33を介して配置したテンションローラ34と、駆動スプロケット32を駆動する走行駆動油圧モータ35と、合成ゴム製の履帯形状の走行クローラ36とを有する。駆動スプロケット32と、テンションローラ34と、複数のトラックローラ30とを介して、トラックフレーム31に走行クローラ36を支持している。走行駆動油圧モータ35によって走行クローラ36が前進方向又は後進方向に駆動されることになる。 As shown in FIGS. 3 and 4, the left and right
図5乃至図7に示されるように、左右の脚体5a,5bは、第1乃至第10の複数の軸によって、個別に折り曲げてそれぞれの姿勢を変更可能に構成している。即ち、第1軸及び第2軸として後述する左右の股関節軸7と、第3軸及び第4軸として後述する左右の膝関節軸6と、第5軸及び第6軸として後述する左右の足首関節軸5と、第7軸及び第8軸として後述する左右の後側足関節軸10と、第9軸及び第10軸として後述する左右の前側足関節軸11とを備えている。 As shown in FIGS. 5 to 7, the left and
図5乃至図7に示されるように、左右の脚体5a,5bは、それぞれ水平方向(横方向)に延びる足首関節軸5と、膝関節軸6と、股関節軸7とを有する。左右の脚体5a,5bに足首関節軸5を介して左右の後側走行部2a,2b及び左右の前側走行部3a,3bを連結する。左右の脚体5a,5bに股関節軸7を介して作業機体4を連結する。膝関節軸6を介して左右の脚体5a,5bが側面視でく形状に折り曲がるように構成している。 As shown in FIGS. 5 to 7, the left and
図5乃至図7に示されるように、左右の脚体5a,5bは、第1乃至第10の複数のフレームによって、個別に折り曲げてそれぞれの姿勢を変更可能に構成している。即ち、第1フレーム及び第2フレームとして後述する左右の後側足フレーム8a,8bと、第3フレーム及び第4フレームとして後述する左右の前側足フレーム9a,9bと、第5フレーム及び第6フレームとして後述する左右の足根フレーム12a,12bと、第7フレーム及び第8フレームとして後述する左右の脛フレーム13a,13bと、第9フレーム及び第10フレームとして後述する左右の大腿フレーム14a,14bとを備えている。 As shown in FIGS. 5 to 7, the left and
図5乃至図7に示されるように、左右の脚体5a,5bは、左右の後側走行部2a,2bを支持する左右の後側足フレーム8a,8bと、左右の前側走行部3a,3bを支持する左右の前側足フレーム9a,9bと、左右の後側足フレーム8a,8bの前端側(左右の前側足フレーム9a,9bの後端側)に左右の後側足関節軸10(前側足関節軸11)を介して後端側(前端側)を連結する左右の足根フレーム12a,12bと、左右の足根フレーム12a,12bの前後幅の中間の上端側に左右の足首関節軸5を介して下端側を連結する左右の脛フレーム13a,13bと、左右の脛フレーム13a,13bの上端側に左右の膝関節軸6を介して下端側を連結する左右の大腿フレーム14a,14bとを有している。左右の脚体5a,5bは、左右対称の構造に構成されている。 As shown in FIGS. 5 to 7, the left and
図2乃至図5に示されるように、左右の前側走行部3a,3bと、左右の後側走行部2a,2bと、駆動源としてのエンジン20及び作業機としての丸太握持アーム22を配置する作業機体4と、前側走行部3a,3b及び後側走行部2a,2bに作業機体4を支持する左右の脚体5a,5bとを備える。左右の脚体5a,5bは、足首関節軸5と、膝関節軸6と、股関節軸7とを有し、左右の脚体5a,5bに足首関節軸5を介して左右の前側走行部3a,3b及び左右の後側走行部2a,2bを連結し、左右の脚体5a,5bに股関節軸7を介して作業機体4を連結し、膝関節軸6を介して左右の脚体5a,5bが折り曲がるように構成している。したがって、左右の前側走行部3a,3b及び左右の後側走行部2a,2bを接地させた状態で、前後方向、左右方向、上下方向に機体重心を移動でき、作業機体4の地上高を簡単に変更できる。また、左右の脚体5a,5bを互い違いにして、前後の走行部2a,2b,3a,3bの前後方向の最大接地幅を簡単に大きくすることができ、進行方向の幅が大きなくぼ地を簡単に乗り越えることができる。 As shown in FIGS. 2 to 5, left and right
図5乃至図7に示されるように、作業機体4は坐フレーム15を有し、左右の脚体5a,5bの各大腿フレーム14a,14bの上下幅の中間に股関節軸7を介して坐フレーム15の前後幅の中間を連結している。股関節軸7回りに坐フレーム15が回動することによって、坐フレーム15の前端側(後端側)が上動(下動)又は下動(上動)し、坐フレーム15の前後方向の傾斜角が変更されることになる。 As shown in FIGS. 5 to 7, the working
図5乃至図7に示されるように、左右の脚体5a,5bは、第1乃至第10の複数の油圧シリンダによって、個別に折り曲げてそれぞれの姿勢を変更可能に構成している。即ち、第1油圧シリンダ及び第2油圧シリンダとして後述する左右の股関節油圧シリンダ44a,44bと、第3油圧シリンダ及び第4油圧シリンダとして後述する左右の膝関節油圧シリンダ48a,48bと、第5油圧シリンダ及び第6油圧シリンダとして後述する左右の足首関節油圧シリンダ52a,52bと、第7油圧シリンダ及び第8油圧シリンダとして後述する左右のかかと関節油圧シリンダ56a,56bと、第9油圧シリンダ及び第10油圧シリンダとして後述する左右のつま先関節油圧シリンダ60a,60bとを備えている。 As shown in FIGS. 5 to 7, the left and
股関節軸7に側面視L形状の中間を回動可能に被嵌したピッチアーム40と、坐フレーム15の前後方向の傾斜角を調節するための水平機構としてのピッチ油圧シリンダ16とを備える。坐フレーム15の前端側に軸体41を介してピッチ油圧シリンダ16を連結する。ピッチ油圧シリンダ16のピストン16aの先端側に軸体42を介してピッチアーム40のL形状の一端側を連結する。また、左右の大腿フレーム14a,14bの下端側に軸体43を介して左右の股関節油圧シリンダ44a,44bを連結する。股関節油圧シリンダ44a,44bのピストン45の先端側に軸体46を介してピッチアーム40のL形状の他端側を連結する。 A
その結果、ピッチ油圧シリンダ16によって股関節軸7回りに坐フレーム15を回動して、坐フレーム15の前後方向の傾斜を修正して前後方向に水平に支持することになる。また、左右の股関節油圧シリンダ44a,44bによって股関節軸7回りに坐フレーム15が回動して、坐フレーム15と左右の大腿フレーム14a,14bとの相対的な連結角度を変更することになる。 As a result, the
即ち、左右の股関節油圧シリンダ44a,44bを作動させながら、ピッチ油圧シリンダ16を作動させることによって、坐フレーム15の前後方向の傾斜が略水平に維持された状態で、坐フレーム15と左右の大腿フレーム14a,14bとの相対角度が変更されることになる。なお、左右の股関節油圧シリンダ44a,44bを各別に作動することによって、坐フレーム15に対する左右の大腿フレーム14a,14bの相対角度は独立してそれぞれ変更される。 That is, by operating the pitch
図2乃至図5に示されるように、左右の脚体5a,5bは、足根フレーム12a,12bに足首関節軸11を介して連結する脛フレーム13a,13bと、脛フレーム13a,13bに膝関節軸6を介して連結する大腿フレーム14a,14bとを有し、作業機体4は坐フレーム15を有し、左右の脚体5a,5bの各大腿フレーム14a,14bに股関節軸7を介して坐フレーム15を連結し、坐フレーム15の前後方向の傾斜角を調節するための水平機構としてのピッチ油圧シリンダ16を備え、坐フレーム15を水平に支持するように構成している。したがって、作業機体4の地上高を確保しながら、作業機体4の左右方向及び前後方向の傾斜角を簡単に変更でき、作業機体4を安定した姿勢で支持できる。 As shown in FIGS. 2 to 5, the left and
左右の大腿フレーム14a,14bの上端側には、左右の軸体47を介して、左右の膝関節油圧シリンダ48a,48bをそれぞれ連結する。左右の膝関節油圧シリンダ48a,48bのピストン49の先端側には、左右の軸体50を介して、脛フレーム13a,13bの中間をそれぞれ連結する。その結果、左右の膝関節油圧シリンダ48a,48bを作動することによって、左右の膝関節軸6回りに左右の大腿フレーム14a,14bが回動して、左右の脛フレーム13a,13bと左右の大腿フレーム14a,14bとの相対的な連結角度がそれぞれ変更されることになる。なお、左右の膝関節油圧シリンダ48a,48bを各別に作動することによって、左右の脛フレーム13a,13bに対する左右の大腿フレーム14a,14bの相対角度は独立してそれぞれ変更される。 Left and right knee joint
左右の脛フレーム13a,13bの上端側には、左右の軸体51を介して、左右の足首関節油圧シリンダ52a,52bをそれぞれ連結する。左右の足首関節油圧シリンダ52a,52bのピストン53の先端側には、左右の軸体54を介して、左右の足根フレーム12a,12bの前端側をそれぞれ連結する。その結果、左右の足首関節油圧シリンダ52a,52bを作動することによって、左右の足首関節軸5回りに左右の脛フレーム13a,13bが回動して、左右の足根フレーム12a,12bと左右の脛フレーム13a,13bとの相対的な連結角度がそれぞれ変更されることになる。なお、左右の足首関節油圧シリンダ52a,52bを各別に作動することによって、左右の足根フレーム12a,12bに対する左右の脛フレーム13a,13bの相対角度は独立してそれぞれ変更される。 Left and right ankle joint
左右の足根フレーム12a,12bの後端側には、左右の軸体55を介して、左右のかかと関節油圧シリンダ56a,56bをそれぞれ連結する。左右のかかと関節油圧シリンダ56a,56bのピストン57の先端側には、左右の軸体58を介して、左右の後側足フレーム8a,8bの後端側をそれぞれ連結する。その結果、左右のかかと関節油圧シリンダ56a,56bを作動することによって、左右の後側足関節軸10回りに左右の後側足フレーム8a,8bが回動して、左右の後側足フレーム8a,8bと左右の足根フレーム12a,12bとの相対的な連結角度がそれぞれ変更されることになる。なお、左右のかかと関節油圧シリンダ56a,56bを各別に作動することによって、左右の足根フレーム12a,12bに対する左右の後側足フレーム8a,8bの相対角度は独立してそれぞれ変更される。 Left and right heel joint
左右の足根フレーム12a,12bの前端側には、左右の軸体59を介して、左右のつま先関節油圧シリンダ60a,60bをそれぞれ連結する。左右のつま先関節油圧シリンダ60a,60bのピストン61の先端側には、左右の軸体62を介して、左右の前側足フレーム9a,9bの前端側をそれぞれ連結する。その結果、左右のつま先関節油圧シリンダ60a,60bを作動することによって、左右の前側足関節軸11回りに左右の前側足フレーム9a,9bが回動して、左右の前側足フレーム9a,9bと左右の足根フレーム12a,12bとの相対的な連結角度がそれぞれ変更されることになる。なお、左右のつま先関節油圧シリンダ60a,60bを各別に作動することによって、左右の足根フレーム12a,12bに対する左右の前側足フレーム9a,9bの相対角度は独立してそれぞれ変更される。 Left and right toe joint
図2乃至図5に示されるように、左右の脚体5a,5bは、前側走行部3a,3bを支持する前側足フレーム9a,9bと、後側走行部2a,2bを支持する後側足フレーム8a,8bとを有し、前側足フレーム9a,9bに前側足関節軸11を介して足根フレーム12a,12bを連結し、後側足フレーム8a,8bに後側足関節軸10を介して足根フレーム12a,12bを連結している。したがって、前側走行部3a,3bの前側又は後側走行部2a,2bの後側を上下方向に移動して迎え角を大きくすることができるから、大きな段差地を簡単に移動できる。また、前側走行部3a,3bの前側と後側走行部2a,2bの後側とを同時に下方向に移動して足根フレーム12a,12bを持上げることができるから、左右の脚体5a,5bの全長より高く作業機体4を上昇できる。また、前側走行部3a,3bの前側と後側走行部2a,2bの後側とを同時に上方向に移動して前後の接地幅を小さくすることができるから、狭小場所でもUターン又は信地旋回等の方向転換を簡単に実行できる。 As shown in FIGS. 2 to 5, the left and
図8は本実施形態における材木運搬車1(不整地用走行車両)の油圧回路70を示している。材木運搬車1の油圧回路70は、左右の後側走行部2a,2b及び左右の前側走行部3a,3bの出力可変容量形の各走行駆動油圧モータ35をそれぞれ駆動する走行用油圧ポンプ71と、油圧機器21の各部にチャージ圧油を供給するチャージ用油圧ポンプ72と、左の脚体5aの各油圧シリンダ44a,48a,52a,56a,60aを作動する出力可変容量形の右側脚体用油圧ポンプ73と、右の脚体5bの各油圧シリンダ44b,48b,52b,56b,60bを作動する出力可変容量形の左側脚体用油圧ポンプ74とを備える。走行用油圧ポンプ71と、チャージ用油圧ポンプ72と、右側脚体用油圧ポンプ73と、左側脚体用油圧ポンプ74とは、エンジン20の回転力により作動する。なお、油圧回路70には、リリーフ弁や流量調整弁、チェック弁、オイルクーラ、オイルフィルタ等を備えている。 FIG. 8 shows a
また、右側脚体用油圧ポンプ73には、分流弁75aと、右の股関節制御弁76aとを介して右の股関節油圧シリンダ44aを接続している。右側脚体用油圧ポンプ73には、分流弁77aと、右の膝関節制御弁78aとを介して右の膝関節油圧シリンダ48aを接続している。右側脚体用油圧ポンプ73には、分流弁79aと、右の足首関節制御弁80aとを介して右の足首関節油圧シリンダ52aを接続している。右側脚体用油圧ポンプ73には、分流弁81aと、右のつま先関節制御弁82aとを介して右のつま先関節油圧シリンダ56aを接続している。右側脚体用油圧ポンプ73には、分流弁83aと、右のかかと関節制御弁84aとを介して右のかかと関節油圧シリンダ60aを接続している。右側脚体用油圧ポンプ73には、分流弁85と、ピッチ制御弁86(電磁比例油圧制御弁)とを介してピッチ油圧シリンダ16を接続している。 The right leg
また、上述した右側脚体用油圧ポンプ73と同様に、左側脚体用油圧ポンプ74には、分流弁75bと、左の股関節制御弁76bとを介して左の股関節油圧シリンダ44bを接続している。右側脚体用油圧ポンプ73には、分流弁77bと、左の膝関節制御弁78bとを介して左の膝関節油圧シリンダ48bを接続している。右側脚体用油圧ポンプ73には、分流弁79bと、左の足首関節制御弁80bとを介して左の足首関節油圧シリンダ52bを接続している。右側脚体用油圧ポンプ73には、分流弁81bと、左のつま先関節制御弁82bとを介して左のつま先関節油圧シリンダ56bを接続している。右側脚体用油圧ポンプ73には、分流弁83bと、左のかかと関節制御弁84bとを介して左のかかと関節油圧シリンダ60bを接続している。 Similarly to the right leg
上述した各油圧シリンダ44a,48a,52a,56a,60a,44b,48b,52b,56b,60bには、それらの作動油圧をそれぞれ検出する油圧センサ87を取付けている。なお、上述した各制御弁76a,78a,80a,82a,84a,76b,78b,80b,82b,84bは、電磁式方向流量制御油圧切換弁にて形成し、位置制御及び力制御(インピーダンス制御)によって、各油圧シリンダに供給する作動油の印加方向及び印加流量を制御可能に構成している。 Each of the
さらに走行用油圧ポンプ71には、左前変速制御弁88aを介して左前走行駆動油圧モータ35を接続する。左前走行駆動油圧モータ35の出力(回転速度)を変更する操向油圧シリンダ89を備える。左前変速制御弁88aに操向制御弁90aを介して操向油圧シリンダ89を接続している。走行用油圧ポンプ71には、右前変速制御弁88bを介して右前走行駆動油圧モータ35を接続する。右前走行駆動油圧モータ35の出力(回転速度)を変更する操向油圧シリンダ89を備える。右前変速制御弁88bに操向制御弁90bを介して操向油圧シリンダ89を接続している。 Further, the left front travel drive
また、走行用油圧ポンプ71には、左後変速制御弁88cを介して左後走行駆動油圧モ
ータ35を接続する。左後走行駆動油圧モータ35の出力(回転速度)を変更する操向油圧シリンダ89を備える。左後変速制御弁88cに操向制御弁90cを介して操向油圧シリンダ89を接続している。走行用油圧ポンプ71には、右後変速制御弁88dを介して右後走行駆動油圧モータ35を接続する。右後走行駆動油圧モータ35の出力(回転速度)を変更する操向油圧シリンダ89を備える。右後変速制御弁88dに操向制御弁90dを介して操向油圧シリンダ89を接続している。各走行駆動油圧モータ35の出力軸の回転速度を検出する左前車速センサ91、右前車速センサ91、左後車速センサ91、右後車速センサ91を備える。Further, the left rear travel drive
次に、本実施形態の材木運搬車1の走行制御について説明する。図9は、材木運搬車1の走行制御手段の機能ブロック図であり、マイクロコンピュータ等の走行コントローラ100は、制御プログラムを記憶したROMと各種データを記憶したRAMとを備える。図9に示されるように、走行コントローラ100の入力側には、坐フレーム15の左右方向の傾斜角を検出するロールセンサ101と、坐フレーム15の左右方向の傾斜角速度を検出するロール角速度センサ102と、坐フレーム15の前後方向の傾斜角を検出するピッチセンサ103と、右側脚体5aの縮小(坐フレーム15の右側の下動)リミット位置を検出する左下限センサ104と、左側脚体5bの縮小(坐フレーム15の左側の下動)リミット位置を検出する右下限センサ105と、上述した各油圧センサ87と、オペレータが操作する操縦ハンドル27の切り角(左旋回操作量及び右旋回操作量)を検出する操舵角センサ106と、走行変速レバー28の操作位置(前進操作位置及び後進操作位置)を検出する走行変速センサ107と、上述した各車速センサ91とを接続している。また、操舵角センサ106と、走行変速センサ107とは、遠隔操縦器99からの無線操縦信号を受信するように構成している。 Next, traveling control of the
また、図9に示されるように、走行コントローラ100の出力側には、上述した左右の脚体5a,5bの姿勢を制御する各制御弁76a,78a,80a,82a,84a,76b,78b,80b,82b,84bと、坐フレーム15の前後傾きを制御するピッチ制御弁86と、上述した左右の後側走行部2a,2b及び左右の前側走行部3a,3bの各走行駆動油圧モータ35を制御する各制御弁88a,88b,88c,88d,90a,90b,90c,90dとを接続している。 Further, as shown in FIG. 9, on the output side of the
上記の構成により、材木運搬車1が前進方向又は後進方向に移動している場合、ロール角速度センサ102の検出結果に基づき、各制御弁76a,78a,80a,82a,84a,76b,78b,80b,82b,84bが作動して、左下限センサ104及び右下限センサ105によって制限される高さ以上で、左右の脚体5a,5bを各別に伸縮させるための制御を開始する。ロールセンサ101の検出結果に基づき、各制御弁76a,78a,80a,82a,84a,76b,78b,80b,82b,84bの作動を中止して、坐フレーム15の左右方向の傾斜を修正する。また、ピッチセンサ103の検出結果に基づき、ピッチ制御弁86を作動して、坐フレーム15の前後方向の傾斜を修正する。 With the above configuration, when the
その結果、坐フレーム15は、左右の脚体5a,5bを介して略水平に保持される。また、左右の脚体5a,5b(坐フレーム15)を水平制御中、油圧センサ87の検出結果に基づき、各油圧シリンダ44a,48a,52a,56a,60a,44b,48b,52b,56b,60bの駆動速度を制御して、走行部2a,2b,3a,3bから左右の脚体5a,5bに伝達される路面からの衝撃力を吸収する。走行部2a,2b,3a,3bからの衝撃力が、坐フレーム15に伝わるのを防止できる。 As a result, the
また、材木運搬車1外でオペレータが遠隔操縦器99を操作したり、材木運搬車1にオペレータが搭乗して操縦ハンドル27又は走行変速レバー28を操作することによって、材木運搬車1が前進方向又は後進方向に移動している場合、オペレータによって遠隔操縦器99又は操縦ハンドル27又は走行変速レバー28が操作されることによって、操舵角センサ106又は走行変速センサ107の検出結果に基づき、各制御弁88a,88b,88c,88d又は各制御弁90a,90b,90c,90dが作動して、各走行駆動油圧モータ35の駆動油圧又は出力回転速度を制御する。その結果、左右の後側走行部2a,2bの各走行クローラ36及び左右の前側走行部3a,3bの各走行クローラ36が各別に駆動制御され、前進移動又は後進移動又はUターン又はスピンターン(信地旋回)等が実行され、オペレータが希望する方向に希望する速度で移動できる。 In addition, when the operator operates the
次いで、図10乃至図15を参照して、左右の脚体5a,5bの折れ曲り作動を説明する。図10に示されるように、左右の脛フレーム13a,13bの上端側を前方に移動しながら、大腿フレーム14a,14bを機体前方に向けて水平姿勢に移動することによって、坐フレーム15が最前方に移動する。即ち、機体重心が最前方に移動することになる。したがって、急斜面を登る前進走行や、急斜面を下る後進走行のときの機体姿勢が安定する。 Next, the bending operation of the left and
図11に示されるように、左右の脛フレーム13a,13bの上端側を後方に移動しながら、左右の大腿フレーム14a,14bの上端側を後方に移動することによって、坐フレーム15が最後方に移動する。即ち、機体重心が最後方に移動することになる。したがって、急斜面を登る後進走行や、急斜面を下る前進走行のときの機体姿勢が安定する。 As shown in FIG. 11, by moving the upper end sides of the left and right thigh frames 14a and 14b rearward while moving the upper end sides of the left and right tibial frames 13a and 13b rearward, the
図12に示されるように、左右の脛フレーム13a,13bを略直立した姿勢に移動しながら、左右の大腿フレーム14a,14bを略直立した姿勢に移動し、後側走行部2a,2bの後端側を下降させ、且つ前側走行部3a,3bの前端側を下降させて、足根フレーム12a,12bの対地高さを高くすることによって、坐フレーム15の対地高さが高くなる。即ち、脛フレーム13a,13bの連結長さと、大腿フレーム14a,14bの連結長さと、足根フレーム12a,12bの対地高さとを加算した高さに、坐フレーム15が上動することになる。したがって、高所作業に必要な坐フレーム15の支持高さ(脚体5a,5bの長さ)、又は坐フレーム15を水上に支持しながら水中を移動するのに必要な坐フレーム15の支持高さ(脚体5a,5bの長さ)等を簡単に確保できる。 As shown in FIG. 12, the left and right thigh frames 13a and 13b are moved to a substantially upright posture while the left and right thigh frames 14a and 14b are moved to a substantially upright posture, and the
図13に示されるように、前側走行部3a,3bの前端側を上昇させることによって、前側走行部3a,3bの走行クローラ36の迎え角より大きな路面の進行方向の段差を、前側走行部3a,3bが上り下り移動できる。また、図14に示されるように、後側走行部2a,2bの後端側を下降させることによって、後側走行部2a,2bの走行クローラ36の迎え角より大きな路面の進行方向の段差を、後側走行部2a,2bが上り下り移動できる。 As shown in FIG. 13, by raising the front end side of the front traveling
図15に示されるように、右側の脚体5a(左側の脚体5b)を伸長(縮小)しながら、左側の脚体5b(右側の脚体5a)を縮小(伸長)することによって、右の前側走行部3a及び後側走行部2aを路面の左右方向の段差の低い方に移動させながら、左の前側走行部3b及び後側走行部2bを路面の左右方向の段差の高い方に移動させることができる。即ち、路面の左右方向の段差に追従させて、右の前側走行部3a及び後側走行部2a高さと、左の前側走行部3b及び後側走行部2bの高さとを段違いに異ならせて移動できる。したがって、路肩の土手を跨ぐ走行状態や、山の斜面を横切る走行状態のときに、安定した機体姿勢を維持しながら簡単に移動できる。 As shown in FIG. 15, the
図16に示されるように、右側の脚体5a(左側の脚体5b)を前方(後方)に移動しながら、左側の脚体5b(右側の脚体5a)を後方(前方)に移動させ、右の前側走行部3a及び後側走行部2aを先行して移動させながら、左の前側走行部3b及び後側走行部2bを後で遅れて移動させることができる。即ち、右側の脚体5aと左側の脚体5bとを互い違いに前後方向に延長することによって、右の前側走行部3a及び後側走行部2aと、左の前側走行部3b及び後側走行部2bとの前後方向の接地幅を最大に形成できる。したがって、大きな凹部がある路面や、凹凸の激しい路面のときに、路面の凹凸に追従させて、安定した機体姿勢を維持しながら簡単に移動でき、進行方向の幅が大きなくぼ地を簡単に乗り越えることができる。 As shown in FIG. 16, the
図17に示されるように、左右の後側走行部2a,2bを地上に持上げた状態で、左右の前側走行部3a,3bだけを接地させて移動できる。即ち、走行部2a,2b,3a,3bの前後方向の接地幅を最小に形成できる。したがって、狭小場所で材木運搬車1を簡単に旋回できたり、狭少場所に材木運搬車1を簡単に格納することができる。また、着地場所が狭いトラックの荷台上等に材木運搬車1をコンパクトに搭載して、遠隔地等に簡単に搬送できる。なお、前記と逆に、左右の前側走行部3a,3bを地上に持上げた状態で、左右の後側走行部2a,2bだけを接地させて移動できる。 As shown in FIG. 17, with the left and right
次に、図18を参照して、左右の前側走行部3a,3b及び左右の後側走行部2a,2bの第2実施形態を説明する。図17に示されるように、走行クローラ36に代えて、複数の走行車輪36aを一組として、左右の前側走行部3a,3b及び左右の後側走行部2a,2bに複数の走行車輪36aをそれぞれ配置している。左右の前側走行部3a,3b及び左右の後側走行部2a,2bのトラックフレーム31に各組の複数の走行車輪36aを転動自在に組み付けている。なお、各走行車輪36aは、トラックフレーム31にそれぞれ独立懸架してもよい。また、走行駆動油圧モータ35によって少なくとも一つ又は全部の走行車輪36aを同時に駆動してもよい。 Next, a second embodiment of the left and right
上記の記載及び図2乃至図5から明らかなように、左右の前側走行部3a,3bと、左右の後側走行部2a,2bと、駆動源としてのエンジン20及び作業機としての丸太握持アーム22を配置する作業機体4と、前側走行部3a,3b及び後側走行部2a,2bに作業機体4を支持する左右の脚体5a,5bとを備え、左右の脚体5a,5bを屈曲可能に構成してなる不整地用走行車両において、左右の脚体5a,5bの下端側に、左右の前側足関節軸11及び左右の後側足関節軸10を介して、左右の前側走行部3a,3bの後端側及び左右の後側走行部2a,2bの前端側を連結し、左右の前側走行部3a,3bの前端側及び左右の後側走行部2a,2bの後端側が、左右の前側足関節軸11及び左右の後側足関節軸10回りに上下動するように構成したものであるから、左の走行部2b,3b又は右の走行部2a,3aの前後方向の接地幅を変更して、路面抵抗が大きい場所での旋回抵抗を簡単に低減できる。軟弱路面の移動において、走行部2a,2b,3a,3bの前後方向の接地幅を長くして接地圧を低減でき、且つ旋回抵抗が大きくなる場所では、走行部2a,2b,3a,3bの前後方向の接地幅を短くして旋回抵抗を低減でき、不整地での走行性能を向上できる。 As is clear from the above description and FIGS. 2 to 5, the left and right
上記の記載及び図2乃至図5から明らかなように、左右の前側走行部3a,3bの前端側を左右の前側足関節軸11回りに上下動する左右の前側昇降機構としてのつま先関節油圧シリンダ60a,60bと、左右の後側走行部2a,2bの後端側を左右の後側足関節軸10回りに上下動する左右の後側昇降機構としてのかかと関節油圧シリンダ56a,56bとを備えたものであるから、前後の走行部2a,2b,3a,3bを個別に上下動でき、走行部2a,2b,3a,3bの旋回抵抗を低減しながら、走行部2a,2b,3a,3bの接地圧を簡単に確保できる。 As apparent from the above description and FIGS. 2 to 5, the toe joint hydraulic cylinder as a left and right front lifting mechanism that moves up and down the left and right
上記の記載及び図2乃至図5から明らかなように、左右の脚体5a,5bは、前記左右の前側走行部3a,3bを支持する左右の前側足フレーム9a,9bと、前記左右の後側走行部2a,2bを支持する左右の後側足フレーム8a,8bとを有し、前記左右の前側足フレーム9a,9bに左右の前側足関節軸11を介して左右の足根フレーム12a,12bを連結し、左右の後側足フレーム8a.8bに左右の後側足関節軸10を介して左右の足根フレーム12a,12bを連結したものであるから、機体重心を前後方向に移動しながら、左右の前側走行部3a,3b又は左右の後側走行部2a,2bの少なくともいずれか一方又は両方の接地圧を簡単に低減できる。左右の前側走行部3a,3b又は左右の後側走行部2a,2bのいずれか一方を地上に持上げた状態で、左右の前側走行部3a,3b又は左右の後側走行部2a,2bのいずれか他方だけを利用して移動することができる。 As is clear from the above description and FIGS. 2 to 5, the left and
2a,2b 後側走行部
3a,3b 前側走行部
4 作業機体
5a,5b 脚体
5 足首関節軸
6 膝関節軸
7 股関節軸
8a,8b 後側足フレーム
9a,9b 前側足フレーム
10 後側足関節軸
11 前側足関節軸
12a,12b 足根フレーム
20 エンジン(駆動源)
22 丸太握持アーム(作業機)
56a,56b かかと関節油圧シリンダ(後側昇降機構)
60a,60b つま先関節油圧シリンダ(前側昇降機構)2a, 2b Rear
22 Log gripping arm (work machine)
56a, 56b Heel joint hydraulic cylinder (rear lifting mechanism)
60a, 60b toe joint hydraulic cylinder (front lifting mechanism)
Claims (3)
Translated fromJapanese前記左右の脚体の下端側に、左右の前側足関節軸及び左右の後側足関節軸を介して、前記左右の前側走行部の後端側及び前記左右の後側走行部の前端側を連結し、
前記左右の前側走行部の前端側及び前記左右の後側走行部の後端側が、前記左右の前側足関節軸及び前記左右の後側足関節軸回りに上下動するように構成する一方、
前記左右の脚体の上端側に前記作業機体を回動可能に連結する股関節軸を備え、前記股関節軸の軸芯回りに前記作業機体を回動して水平姿勢に維持可能に構成し、
前記作業機体に対して前記左右の脚体の相対連結角度を変更する左右の股関節油圧シリンダと、前記作業機体の前後方向の傾斜角を変更するピッチ油圧シリンダとを備え、
前記左右の股関節油圧シリンダによって前記股関節軸回りに前記左右の脚体を回動可能に構成し、前記ピッチ油圧シリンダによって前記股関節軸回りに前記作業機体を回動可能に構成したことを特徴とする不整地用走行車両。Left and right front running units, left and right rear running units, a working machine body in which a drive source and a work machine are arranged, and left and right leg bodies that support the work machine body in the front running unit and the rear running unit. , In the rough terrain vehicle configured to bend the left and right legs,
The rear end side of the left and right front running parts and the front end side of the left and right rear running parts are connected to the lower end sides of the left and right leg bodies via left and right front foot joint axes and left and right rear foot joint axes. Concatenate,
The front end side of the left and right front running parts and the rear end side of the left and right rear running parts are configuredto move up and down around the left and right front ankle joint axes and the left and right rear ankle joint axes,
A hip joint shaft that rotatably connects the working machine body to the upper end side of the left and right legs, and configured to be able to rotate the work machine body about the axis of the hip joint shaft and maintain a horizontal posture.
Left and right hip hydraulic cylinders that change the relative connection angle of the left and right legs with respect to the work implement, and a pitch hydraulic cylinder that changes the tilt angle in the front-rear direction of the work implement,
The left and right legs are configured to be rotatable about the hip joint axis by the left and right hip joint hydraulic cylinders, and the work machine body is configured tobe rotatable about the hip joint axis by the pitch hydraulic cylinders. Rough terrain vehicle.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007056047AJP4874838B2 (en) | 2007-03-06 | 2007-03-06 | Rough terrain vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007056047AJP4874838B2 (en) | 2007-03-06 | 2007-03-06 | Rough terrain vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008213730A JP2008213730A (en) | 2008-09-18 |
| JP4874838B2true JP4874838B2 (en) | 2012-02-15 |
Family
ID=39834279
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007056047AExpired - Fee RelatedJP4874838B2 (en) | 2007-03-06 | 2007-03-06 | Rough terrain vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4874838B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111532349B (en)* | 2020-05-07 | 2021-10-15 | 杭州华能工程安全科技股份有限公司 | Multi-foot crawler float valve type crawler and crawling method thereof |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63203483A (en)* | 1987-02-18 | 1988-08-23 | Res Dev Corp Of Japan | Active adaptive crawler vehicle |
- 2007
- 2007-03-06JPJP2007056047Apatent/JP4874838B2/ennot_activeExpired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008213730A (en) | 2008-09-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4860508B2 (en) | Rough terrain vehicle | |
| US8118316B2 (en) | Operational methods for a road-building machine | |
| JP4680355B2 (en) | Combine | |
| JP2004143668A (en) | Skid steering loader | |
| US6761234B1 (en) | Skid steer vehicle with steerable suspension | |
| JP6899799B2 (en) | Work platform | |
| JP2866300B2 (en) | Transport vehicle | |
| JP4874838B2 (en) | Rough terrain vehicle | |
| JP2009213400A (en) | Traveling vehicle for unleveled ground | |
| JP4874839B2 (en) | Rough terrain vehicle | |
| JP2007022233A (en) | Crawler type moving body | |
| JP3995621B2 (en) | Paddy field machine | |
| EP2055509A1 (en) | Suspension system having hydraulic equalizer bar control | |
| CA2527894C (en) | Articulated dozer with frame structure for decreased height variation in the vehicle chassis | |
| JP2009214713A (en) | Traveling vehicle for irregular ground | |
| JP2010012928A (en) | Traveling vehicle for irregular ground | |
| JP6899800B2 (en) | Work platform | |
| JP2004299615A (en) | Work vehicle traction device and traction method | |
| JP7264557B1 (en) | Elevating crawler work vehicle | |
| JPH0559750A (en) | Traveling vehicle fitted with liftable working machine | |
| JP3838879B2 (en) | Power steering device for paddy field machine | |
| JP2867544B2 (en) | Travel chassis such as combine | |
| JP4423153B2 (en) | Agricultural vehicle attitude control device | |
| JPH1175423A (en) | Work equipment traveling equipment | |
| JP2009213401A (en) | Traveling vehicle for unleveled ground |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20090701 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20110325 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20110817 | |
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20110929 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20111026 | |
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20111124 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20141202 Year of fee payment:3 | |
| R150 | Certificate of patent or registration of utility model | Free format text:JAPANESE INTERMEDIATE CODE: R150 | |
| LAPS | Cancellation because of no payment of annual fees |