JP4156231B2 - 超音波ハンド・ピースにおける横振動を検出するための方法 - Google Patents
超音波ハンド・ピースにおける横振動を検出するための方法Download PDFInfo
- Publication number
- JP4156231B2 JP4156231B2JP2001360101AJP2001360101AJP4156231B2JP 4156231 B2JP4156231 B2JP 4156231B2JP 2001360101 AJP2001360101 AJP 2001360101AJP 2001360101 AJP2001360101 AJP 2001360101AJP 4156231 B2JP4156231 B2JP 4156231B2
- Authority
- JP
- Japan
- Prior art keywords
- hand piece
- blade
- impedance
- ultrasonic
- generator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034methodMethods0.000titleclaimsdescription87
- 230000004044responseEffects0.000claimsdescription24
- 239000004973liquid crystal related substanceSubstances0.000claimsdescription16
- 238000013213extrapolationMethods0.000claimsdescription8
- 238000010408sweepingMethods0.000claimsdescription8
- 238000012544monitoring processMethods0.000claimsdescription7
- 238000002604ultrasonographyMethods0.000claimsdescription6
- 238000005259measurementMethods0.000description22
- 210000001519tissueAnatomy0.000description21
- 230000008859changeEffects0.000description16
- 230000000694effectsEffects0.000description6
- 230000006378damageEffects0.000description5
- 238000002405diagnostic procedureMethods0.000description5
- 230000023597hemostasisEffects0.000description5
- 230000015271coagulationEffects0.000description4
- 238000005345coagulationMethods0.000description4
- 238000001514detection methodMethods0.000description4
- 230000006870functionEffects0.000description4
- 238000001816coolingMethods0.000description3
- 230000008878couplingEffects0.000description3
- 238000010168coupling processMethods0.000description3
- 238000005859coupling reactionMethods0.000description3
- 230000007423decreaseEffects0.000description3
- 230000000977initiatory effectEffects0.000description3
- 230000007257malfunctionEffects0.000description3
- 238000013021overheatingMethods0.000description3
- 230000008569processEffects0.000description3
- 230000000451tissue damageEffects0.000description3
- 231100000827tissue damageToxicity0.000description3
- 125000002066L-histidyl groupChemical group[H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H]0.000description2
- 230000003044adaptive effectEffects0.000description2
- 230000008901benefitEffects0.000description2
- 210000004204blood vesselAnatomy0.000description2
- 239000000919ceramicSubstances0.000description2
- 230000003247decreasing effectEffects0.000description2
- 238000013461designMethods0.000description2
- 238000010586diagramMethods0.000description2
- 230000005284excitationEffects0.000description2
- 238000010438heat treatmentMethods0.000description2
- 230000000737periodic effectEffects0.000description2
- 238000012360testing methodMethods0.000description2
- 206010037660PyrexiaDiseases0.000description1
- 230000002411adverseEffects0.000description1
- 230000000712assemblyEffects0.000description1
- 238000000429assemblyMethods0.000description1
- 230000002238attenuated effectEffects0.000description1
- 230000009286beneficial effectEffects0.000description1
- 230000015572biosynthetic processEffects0.000description1
- 230000000740bleeding effectEffects0.000description1
- 238000004590computer programMethods0.000description1
- 239000002826coolantSubstances0.000description1
- 238000012937correctionMethods0.000description1
- 238000003745diagnosisMethods0.000description1
- 238000006073displacement reactionMethods0.000description1
- 238000002224dissectionMethods0.000description1
- 230000001747exhibiting effectEffects0.000description1
- 239000012530fluidSubstances0.000description1
- 238000013467fragmentationMethods0.000description1
- 238000006062fragmentation reactionMethods0.000description1
- 230000035876healingEffects0.000description1
- 230000020169heat generationEffects0.000description1
- 238000002847impedance measurementMethods0.000description1
- 238000007689inspectionMethods0.000description1
- 230000003993interactionEffects0.000description1
- 230000002262irrigationEffects0.000description1
- 238000003973irrigationMethods0.000description1
- 239000000463materialSubstances0.000description1
- 230000007246mechanismEffects0.000description1
- 238000006386neutralization reactionMethods0.000description1
- 230000010363phase shiftEffects0.000description1
- 238000011084recoveryMethods0.000description1
- 238000005070samplingMethods0.000description1
- 229920006395saturated elastomerPolymers0.000description1
- 230000035945sensitivityEffects0.000description1
- 238000010008shearingMethods0.000description1
- 210000004872soft tissueAnatomy0.000description1
- 238000003786synthesis reactionMethods0.000description1
- 238000013024troubleshootingMethods0.000description1
- 238000009834vaporizationMethods0.000description1
- 230000008016vaporizationEffects0.000description1
- XLYOFNOQVPJJNP-UHFFFAOYSA-NwaterSubstancesOXLYOFNOQVPJJNP-UHFFFAOYSA-N0.000description1
Images













Landscapes
- Surgical Instruments (AREA)
Description
本発明は本発明と同一の発明の名称を有していて本明細書に参考文献として含まれる2000年10月20日に出願されている米国仮特許出願第60/242,251号に関連し、これに基づく優先権を主張する。
【0001】
【発明の属する技術分野】
本発明は一般に超音波外科システムに関し、特に、超音波ハンド・ピース/ブレードにおける横モード振動を検出するための方法に関する。
【0002】
【従来の技術】
電気的な外科用メスおよびレーザーが組織および血管を焼灼することにより軟質組織の切開および止血を同時に行なうという2種類の機能を実行するための外科装置として使用できることが知られている。しかしながら、このような装置は凝固状態を形成するために極めて高い温度を使用するために気化および発煙ならびにはねかえりを生じる。さらに、このような装置を使用することにより、比較的広い熱的な組織損傷の領域を形成する場合が多い。
【0003】
超音波駆動機構による高速で振動する外科ブレードによる組織の切断および焼灼も良く知られている。このような超音波切断装置に付随する問題の一例は無調整または無減衰状態の振動および熱、およびこれらによる材料疲労である。動作空間の環境内において、ブレードを冷却するための熱交換器によるシステムの冷却処理を含むことによる上記加熱の問題を制御する試みがこれまで行なわれてきた。例えば、既知のシステムの一例において、超音波切断および組織フラグメント化システムは循環水ジャケットおよび切断部位の灌注および吸引のための手段を備えた冷却システムを必要とする。別の既知のシステムは切断ブレードへの低温流体の供給が必要である。
【0004】
トランスデューサ内に発生する熱を制限するための手段として当該トランスデューサに供給する電流を制限することが知られている。しかしながら、このことにより患者の最も効果的な治療を必要とする時にブレードに不十分な出力を供給することが起こり得る。本特許出願の譲受人に譲渡されていて本明細書に参考文献として含まれるThomasに発行されている米国特許第5,026,387号はブレードに供給する駆動エネルギーを制御することにより冷却剤を使用することなく超音波外科切断および止血システムにおける発熱を調整するためのシステムを開示している。この特許によるシステムにおいて、超音波発生装置は特定の電圧、電流および例えば1秒当たり55,500サイクルの振動数の電気的信号を生成する超音波発生装置が備えられている。この発生装置はケーブルを介してハンド・ピースに接続されており、このハンド・ピースが圧電セラミック素子を収容して超音波トランスデューサを形成している。ハンド・ピース上のスイッチまたは別のケーブルにより発生装置に接続しているフット・スイッチに応じて、この発生装置の信号がトランスデューサに供給されて、その素子における長手方向の振動が生じる。一定の構造体がこのトランスデューサを外科ブレードに接続しており、これにより、外科ブレードが発生装置からの信号のトランスデューサへの供給時に超音波振動数で振動する。さらに、上記の構造体は所定の振動数で共振するように構成されているので、トランスデューサにより開始される動作が増幅できる。
【0005】
トランスデューサに供給される信号はブレードの負荷状態(組織に対する接触または後退)についての継続的または周期的な感知情報に応じて適宜トランスデューサに出力を供給するように制御される。この結果、装置は低出力のアイドリング状態から、外科用メスの組織への接触の有無に自動的に応じて選択可能な高出力の切断処理状態に到達する。第3の高出力凝固モードはブレードが組織に接触していない時のアイドリング出力レベルへの自動復帰を伴って手動により選択可能である。この超音波出力はブレードに継続的に供給されないので、周囲の発熱を減少しながら、必要に応じて切開および焼灼のために組織に十分なエネルギーを供給できる。
【0006】
上記Thomas特許におけるコントロール・システムはアナログ型である。位相ロック・ループ(電圧制御型オシレータ、周波数分割器、電源スイッチ、整合ネットワークおよび位相検出器を含む)がハンド・ピースに供給される振動数を安定化する。ハンド・ピースに供給される振動数、電流および電圧等のパラメータはブレード上の負荷により変化するので、マイクロプロセッサがこれらをサンプリングすることにより出力量を制御する。
【0007】
上記Thomas特許において記載されているような典型的な超音波外科システム内の発生装置における出力対負荷曲線は2個の部分を有している。第1の部分は負荷の増加に従って出力が増加する定常的な電流供給を示している正の勾配を有している。第2の部分は負荷の増加に従って出力が減少する定常的または飽和状態の出力電圧を示している負の勾配を有している。第1の部分に対応して調整される電流は各電子部品の設計により固定され、第2の部分の電圧は設計における最大出力電圧により制限される。このようなシステムの出力における出力対負荷の特性は種々のハンド・ピース・トランスデューサおよび超音波ブレードに対して最適化できないために上記の構成は柔軟性に欠ける。外科装置用の従来のアナログ型超音波出力システムの性能は部品の許容度および動作温度変化による発生装置の電子部品における可変性により影響を受ける。特に、温度変化は振動数ロック範囲、駆動信号レベル、およびその他のシステム性能測定値を含む重要なシステム・パラメータにおいて多様な変化を生じる。
【0008】
効率的な様式で超音波外科システムを動作するために、始動時においてハンド・ピース・トランスデューサに供給される信号振動数を一定範囲において掃引することにより共振振動数を位置決めする。この位置が見つかると、発生装置の位相ロック・ループがその共振振動数に対してロックされ、電圧位相角度に対してトランスデューサ電流を継続してモニターして、その共振振動数でトランスデューサを駆動することにより当該装置を共振状態に維持する。このようなシステムにおける重要な機能はトランスデューサを負荷の存在下に共振する状態に維持することおよび共振振動数を変化する温度変化である。しかしながら、これら従来の超音波駆動システムは適応振動数制御に対して柔軟性がほとんどまたは全く無い。このような柔軟性は不所望な共振を識別するシステム能力において重要である。特に、これらのシステムは一方向における共振に応じて探索できるのみである、すなわち、振動数の増減を伴い、これらの探索パターンが固定されている。このシステムは(i)無関係の共振モードを飛び越えること、またはどの共振を飛び越えるかまたはロックするか等の任意の発見的決定(heuristic decisions)を行なうことができず、(ii)適当な振動数の係止が行なわれている時のみにおいて出力供給を確実に行なうことができない。
【0009】
さらに、従来技術の超音波発生装置システムは当該システムにおいて適応制御アルゴリズムの使用および決定動作を可能にする振幅制御においても柔軟性がほとんど無い。例えば、これらの固定されたシステムはブレード上の負荷および/または電圧位相角度に対する電流に基づいて例えば電流または振動数等の出力駆動要素に関する発見的決定を行なう能力に欠けている。このことはトランスデューサの有効寿命を延ばしてブレードに対する安全な動作条件を確定する一定の効率的な性能に対応する最適なトランスデューサ駆動信号レベルを設定するためのシステム能力も制限する。さらに、このような振幅および振動数に関する制御の欠如により、トランスデューサ/ブレード・システムについての診断検査および全体的なトラブルシューティングの支援を行なうシステム能力が低下する。
【0010】
過去に行われたいくつかの限定された診断検査は信号をトランスデューサに供給してブレードを動かし、システムを共鳴その他の振動モード状態にする。次いで、システムがこれらモードの一つの状態にあるときにトランスデューサに供給される電気信号を測定することにより、ブレードの応答を決定している。本明細書に参考文献として含まれる2000年10月20日に出願されている米国特許第09/693,621号に記載されている超音波システムは出力駆動振動数を掃引して、超音波トランスデューサおよびブレードの振動数応答をモニターし、この応答からパラメータを抽出して、これらのパラメータをシステム診断情報として使用する能力を有している。この振動数掃引および応答測定モードはデジタル・コード(digital code)を介して達成され、その出力駆動振動数が従来技術の超音波システムにおいて存在しない高い解像度、精度、および再現性により段階付けできる。
【0011】
【発明が解決しようとする課題】
従来の超音波システムに付随する他の問題点はハンド・ピース/ブレードにおいて望まない振動が起きることである。超音波ブレードはこのハンド・ピース/ブレードの振動の長手軸に垂直である軸に沿っても振動する。このような振動は横モード振動と呼ばれている。長手方向振動がX,Y,Z座標系におけるZ方向であると考えると、このブレードのY軸に沿う振動は横「フラップ・モード(flap mode)」振動と呼ばれ、このブレードのX軸に沿う振動は横「フック・モード(hook mode)」と呼ばれる。ブレードは典型的にはそれらの刃の部分を包囲するシースを有する。
【0012】
横モード振動は熱を発生し、それにより高いブレードおよび/またはブレード・シース温度がもたらされる。これにより凹んだ(indented)狭い切断箇所(cut)を囲む組織または凝固領域を損傷し、患者の治癒および回復時間に悪影響を及ぼすことがある。さらに、横モード振動はブレード先端の破損を引き起こすことがある。これらの振動はトランスデューサにおけるディスクの損傷のようなハンド・ピースの傷を示していることもある。過剰な横モード振動により発生する音が時には耳に煩わしいが、使用者はできるだけこれを無視しようとする場合が多い。従って、過熱したブレードにより生じる組織の損傷のような不所望の効果の発生を防止するため、横モード振動を検出することは有益である。
【0013】
【課題を解決するための手段】
本発明は超音波トランスデューサ/ブレードにおける横モード振動を検出するための方法である。この方法では、ハンド・ピース/ブレードに供給される出力レベルが変化した際に、それが予想した通りに変化しているか否かを決定するために当該ハンド・ピース/ブレードに供給する出力を多数の出力レベルでモニターしている。(出力レベルは、ブレードにかかる負荷の変化の程度にかかわらず、発生装置がハンド・ピース/ブレードを駆動する特定の電流と関連している。)
【0014】
横モード振動は長手方向振動とハンド・ピース/ブレードとの(非線形)相互作用により励起される。これらの振動によりブレードが屈曲し、それにより熱が発生し、その結果望んでいる長手方向振動からエネルギーが徐々に流失する。このエネルギーの流出はハンド・ピース/ブレードのインピーダンスの増加として現れ、それによりハンド・ピースのトランスデューサを通して必要とされる電流を維持するためにハンド・ピース/ブレードに供給される出力の増加を必要とする。
【0015】
長手方向振動から横振動への非線形機械的カップリングは一定のエネルギー/変位の閾値より上でのみ容易に感知できる。従って、低い「基準(reference)」出力レベルにおいて見られるインピーダンスがより高い出力レベルにおける同じハンド・ピース/ブレードのインピーダンスよりも少ないと、横振動は非常に起きやすい。本発明の実施形態において、検査している低出力レベルにおける出力測定値を用いて高出力レベルにおいて予想される出力を計算する。
【0016】
低出力レベル環境における基準電力消費測定を実行する。この測定は高出力レベル環境において合格/不合格の出力消費レベルを確定するのに用いられる。この基準出力レベル測定は本質的であるが、その理由は発生装置により見られるトランスデューサ/ブレードのインピーダンスは使用するブレードによって決まるからである。
【0017】
本発明によれば、ブレードが中空(midair)に保持されている間に、ハンド・ピース/ブレードに供給される出力を、駆動電流が低く横振動を誘発しない低出力レベル環境において測定する。低駆動電流環境で得られた値を用いて第2の高出力において予想される出力を計算し、これを用いて高出力レベル環境における第2の測定の合格/不合格の閾値を設定する。次に、ハンド・ピース/ブレードに供給される実際の出力を高出力レベル環境において測定し、高出力レベル環境で実際に測定した出力が上記確定された合格/不合格の閾値レベルを超えたか否かに基づいて、ハンド・ピース/ブレードが横モード振動を示すか否かの決定をする。超えていれば、発生装置の動作を停止し、「横モード振動がハンド・ピース/ブレードに存在します(Transverse Mode Vibrations Present in Hand Piece/Blade)」というエラー・コードをこの発生装置に記憶するとともにコンソールのLCD上に「ハンド・ピース不良(Bad Hand Piece)」というメッセージを表示する。
【0018】
本発明の実施形態の一例において、ブレードが中空に保持されている間に、駆動電流レベルを最小駆動電流から最大駆動電流まで掃引する。この電流掃引時にトランスデューサ電圧と電流駆動信号とをモニターし、これらを発生装置に配置された不揮発性メモリに記憶する。記憶された電圧および電流データを用いて、トランスデューサに供給される出力を計算し、供給電圧(Power-Delivered)対駆動電流(Drive Current)曲線とハンド・ピース/ブレードインピーダンス(Hand Piece/Blade Impedance)対駆動電流(Drive Current)曲線を生成する。生成された応答曲線を用いて外挿を実行してハンド・ピース/ブレードが横モード振動を示しているか否かを決定する。示していれば、発生装置の動作を停止し、「横モード振動がハンド・ピース/ブレードに存在します(Transverse Mode Vibrations Present in Hand Piece/Blade)」というエラー・コードをこの発生装置に記憶するとともにコンソールのLCD上に「ハンド・ピース不良(Bad Hand Piece)」というメッセージを表示する。
【0019】
本発明の別の実施形態において、多レベル駆動出力(Multiple Level Drive Power)対供給出力(Power Delivered)関係および/または、多レベル駆動出力(Multiple Level Drive Power)対インピーダンス(Impedance)関係を、使用する出力レベルの正常な範囲を超える1つまたは複数の出力駆動レベルにおけるハンド・ピースの「オーバードライブ(over-drive)」とともに、潜在的な横モードの問題を検出または予言するのに用いる。これらの「オーバードライブ」出力レベルは問題のある、または問題を生じる可能性のある横モード状態を迅速に認識するのに特に有効である。
【0020】
本発明の別の実施形態において、高出力駆動信号がハンド・ピースに供給されている間、ハンド・ピースに供給される出力を複数の振動数において測定する。あるいはまた、「オーバードライブ」を用いる。ここでは、3つの振動数、すなわち、第1の振動数、第2の振動数および第3の振動数を相互に近接して測定する。第1の振動数はハンド・ピース/ブレードの一次的共鳴振動数であり、主要または意図する長手共鳴振動数と別称される。第2の振動数は第1の振動数の少し下にある。第3の振動数は第1の振動数の少し上にある。予想されるインピーダンスまたは出力は第2の振動数および第3の振動数において若干増加する。インピーダンスまたは出力が実質的により高いか、または予想よりも高い場合は、この状態は、不所望の熱を発生しおよび/または組織に供給される超音波エネルギーを減少させる横共鳴の存在を示す。この場合、発生装置のコンソールにより待機指令または警報が発せられる。必要ならば、ハンド・ピース駆動装置のハンディキャップ付き機能制限または完全な無力化が実行される。
【0021】
ハンド・ピースのインピーダンスまたはそれに供給される出力をモニターする代わりに、位相、電流、電圧、出力係数(power factor)その他の変数を比較のためにモニターすることもできる。あるいはまた、一次的振動数の測定値を僅かに高いおよび僅かに低い振動数測定の双方と比較する代わりに、「二次的振動数」でのみまたは「三次的振動数」でのみ比較を実行する。その結果、追加の振動数をモニターすることが必須ではなくまたは必要とされない場合にモニタリング過程が促進される。
【0022】
本発明の別の実施形態において、ブレードが中空に保持されているか、または組織に接している間に、ハンド・ピース/ブレードに供給される出力を第1の振動数および第2の振動数において測定する。第1の振動数および第2の振動数において得られた値を用いて第3の振動数、第4の振動数および第5の振動数における予想される出力を計算し、実際に測定される第3の出力乃至第5の出力に対する合格/不合格の閾値レベルをそれぞれ設定するために使用する。次に第3の振動数、第4の振動数および第5の振動数においてハンド・ピース/ブレードに供給される実際の出力を測定する。実際に測定した出力のいずれかが上記確定された合格/不合格の閾値レベルを超えたか否かに基づいて、ハンド・ピース/ブレードが横モード振動を示すか否かの決定をする。超えていれば、発生装置の動作を停止し、警告(alert)/警報(alarm)メッセージおよび/または音による警告/警報が発せられる。ハンド・ピースに供給される出力をモニターするのではなく、別の実施形態では、位相、インピーダンス、電流、電圧、出力係数(power factor)、位相マージン、その他の変数を比較のためにモニターすることもできる。
【0023】
本発明のさらに別の実施形態において、横振動が起きるのが意図する駆動共鳴の近くに位置決めされるか否かを決定するので、高出力において一次的/主要共鳴駆動振動数により励振される横モードの検出に関連する困難が解消される。
【0024】
この方法は出力レベル検査に不合格となったハンド・ピースが使用時に横振動モードを示すか否かの指標を与える。さらに、この方法は診断検査時にハンド・ピースとともに使用されているブレードの特定のタイプを知る必要がなくなる。本発明の上記およびその他の特徴および利点は以下の添付図面に基づく本発明の好ましい実施形態の詳細な説明によりさらに明らかになる。
【0025】
【発明の実施の形態】
図1は本発明による方法を実施するためのシステムを示している図である。ケーブル20内の第1の一式のワイヤにより、電気的エネルギー、すなわち、駆動電流がコンソール10からハンド・ピース30に送られ、このハンド・ピース30において、電気的エネルギーが外科メス用ブレード32のような外科装置に長手方向に沿う超音波振動動作を与える。このブレード32は組織の同時的な切開および焼灼処理のために使用できる。ハンド・ピース30に対する超音波電流の供給は当該ハンド・ピース30上に配置されているスイッチ34の制御下に行なうことができ、このスイッチ34はケーブル20内のワイヤを介してコンソール10の中の発生装置に接続している。さらに、この発生装置10はフット・スイッチ40により制御可能であり、このフット・スイッチ40は別のケーブル50を介してコンソール10に接続している。従って、使用時において、外科医は、自分の指でハンド・ピース上のスイッチ34を操作するか自分の足でフット・スイッチ40を操作して、ハンド・ピースに対して超音波電気信号を供給することによりブレードを一定の超音波振動数で長手方向に沿って振動させることができる。
【0026】
発生装置のコンソール10は液晶表示装置12を備えており、この表示装置12は最大切断出力率または切断出力に付随する数値的出力レベル等の種々の手段において選択される切断出力レベルを指示するために使用できる。この液晶表示装置12はシステムにおける別のパラメータを表示するために使用することもできる。出力スイッチ11を使用して装置を始動する。ウォーミング・アップ状態において、「待機(standby)」ライト13が点灯する。動作準備が完了すると、「準備完了(ready)」インジケータ14が点灯して、待機ライトが消える。装置が最大出力を供給する場合に、MAXボタン15が押される。それよりも少ない出力が必要である場合には、MINボタン17を作動する。さらに、MINボタン17を作動する際の出力レベルがボタン16により設定される。
【0027】
出力がスイッチ34またはスイッチ40のいずれかの操作により超音波ハンド・ピースに供給される場合に、この組立体は外科用メスまたはブレードを約55.5kHzで長手方向に沿って振動させ、この長手方向の移動量は使用者により調節可能に選択される駆動出力(電流)の量に比例して変化する。比較的高い切断出力が供給される場合に、ブレードはその超音波振動速度において約40ミクロン乃至100ミクロンの範囲内で長手方向に移動するように設計されている。このようなブレードの超音波振動によりブレードが組織に接触する際に熱が発生する。すなわち、ブレードが組織内において加速することにより移動するブレードの機械的エネルギーが極めて狭い局在化した領域内で熱エネルギーに変換する。この局在化した熱が狭い領域の凝固を形成し、これにより直径が1ミリメートルよりも小さい血管における出血が減少または消去できる。このブレードの切断効率および止血の程度は供給される駆動出力のレベル、外科医の切断速度、組織の性質および血管分布により変化する。
【0028】
図2においてさらに詳細に示すように、超音波ハンド・ピース30は電気的エネルギーを機械的エネルギーに変換してトランスデューサの各端部において長手方向に沿う振動動作を生じるための圧電変換トランスデューサ36を収容している。トランスデューサ36はそのスタック(堆積体)に沿う特定の点に配置されている動作ゼロ点(motion null point)を有する積み重ね状のセラミック圧電素子の形態である。このトランスデューサ・スタックは2個のシリンダ31とシリンダ33との間に取り付けられている。さらに、シリンダ35がシリンダ33に取り付けられており、当該シリンダ35は別の動作ゼロ点37においてハウジング内に取り付けられている。さらに、ホーン38はその一端側においてゼロ点37に取り付けられていて、その他端側においてカップラー39に取り付けられている。ブレード32はこのカップラー39に固定されている。この結果、ブレード32はトランスデューサ36による一定の超音波振動数の速度で長手方向に沿って振動する。トランスデューサの各端部は当該トランスデューサの共振振動数において一定の最大電流により駆動する場合に不動の節部を構成するスタックの部分を伴って最大の動作を行なう。しかしながら、この最大動作を行なう電流は各ハンド・ピースにより変化し、システムが使用できるハンド・ピースの不揮発性メモリーに記憶されているバルブである。
【0029】
ハンド・ピースの各部品はその組み合わせ体が同一の共振振動数で振動するように設計されている。特に、最終的なこれらの各要素の長さが1/2波長になるように各要素が同調される。長手方向に沿う前後方向の動作は音響学的取付ホーン38のブレード32に近い方の直径が減少するに従って増幅される。従って、ホーン38およびブレード/カップラーはブレード動作を増幅して音響システムにおける残りの部分に対して同調した共振振動を行なうように形状付けられて寸法付けられており、このことにより、ブレード32に近接している音響学的取付ホーン38の端部において最大の前後動作が生じる。トランスデューサ・スタックにおける動作がホーン38により増幅されて約20ミクロン乃至25ミクロンまで移動する。さらに、カップラー39における動作がブレード32により増幅されて約40ミクロン乃至100ミクロンまでブレードが移動する。
【0030】
ハンド・ピースの中のトランスデューサを駆動するための超音波電気信号を形成するシステムを図3および図4に示す。この駆動システムは柔軟であり、所望の振動数および出力レベル設定値において駆動信号を形成できる。システム内のDSP60またはマイクロプロセッサを使用して適当な出力パラメータおよび振動周波数をモニターして切断または凝固動作モードのいずれかにおいて供給される適当な出力レベルを生じる。DSP60またはマイクロプロセッサはさらにトランスデューサ/ブレードのようなシステム中の構成部品について診断検査を行なうために使用するコンピュータ・プログラムも記憶している。
【0031】
例えば、DSPまたはマイクロコンピュータ60に記憶されている位相補正アルゴリズム等のプログラムの制御下において、始動中の振動数を一定の範囲、例えば20kHz乃至70kHz内の特定値に設定できる。好適な実施形態においては、始動中の振動数を50kHzに設定する。このことは共振に接近していることを示すインピーダンスにおける変化を検出するまで特定速度で掃引することにより行なうことができる。その後、掃引速度を減少してシステムが共振振動数、例えば、55kHzをオーバーシュートしないようにする。この掃引速度は、例えば、50サイクルの増加分における振動数変化を得ることにより達成できる。比較的遅い速度が望まれる場合は、プログラムにおいて、例えば、25サイクルにその増加分を減少することができ、両方の場合が測定したインピーダンスの大きさおよび位相に基づいて適応できる。もちろん、上記増加分の大きさを増加することによりさらに大きな速度が達成できる。さらに、上記の掃引速度は振動数の増加分の更新速度を変化することにより変更できる。
【0032】
例えば、51kHzにおいて不所望な共振モードが存在することが分かっている場合に、上記プログラムは、例えば60kHzから振動数を下げて掃引して共振を見つけることができる。さらに、上記システムは50kHzから掃引して不所望な共振が存在している51kHzを飛び越えることができる。いずれの場合においても、このシステムは高度の柔軟性を有している。
【0033】
動作時において、使用者は外科装置において使用する特定の出力レベルを設定する。この処理はコンソールのフロント・パネル上の出力レベルスイッチ16により行なわれる。このスイッチはDSP60に供給される信号150を発生する。その後、DSP60はコンソール・フロント・パネルの表示装置12に対して配線152(図4)上に信号を送ることにより所定の出力レベルを表示する。
【0034】
実際に外科ブレードを振動させるために、使用者はフット・スイッチ40またはハンド・ピース・スイッチ34を作動する。この作動により図3における配線154上に信号が送られる。この信号は出力をプッシュ−プル増幅器78からトランスデューサ36に供給するために有効である。DSPまたはマイクロプロセッサ60がハンド・ピース・トランスデューサの共振振動数をロックして出力がハンド・ピース・トランスデューサに継続的に供給されるようになると、オーディオ・ドライブ信号が配線156上に送られる。このことによりシステム内の音響指示手段が音を発生して、使用者に対して出力がハンド・ピースに供給されて外科用メスが動作状態になっていることを通知する。
【0035】
図6および図7は本発明の実施形態の一例を示すフロー・チャートである。良好な状態のトランスデューサとブレードを自由状態の空気中にある場合、発生装置により測定されるインピーダンスは使用時の特定の出力レベルに対応する駆動電流とは無関係であり、出力レベル対供給出力の曲線は二次の関係式に従う。従って、低出力レベル/駆動電流により横振動が誘導されない単一の基準低出力レベル環境において供給される出力を測定する際に、他の出力レベルにおいて供給される予想される出力は測定された単一の基準低出力レベルから外挿することができる。この数学的関係はハンド・ピースとともに使用するブレードのタイプにかかわらず、該当する。本発明の目的においては、出力という用語は出力と電圧、インピーダンスおよび電流を始めとしてその任意の構成要素を含む。
【0036】
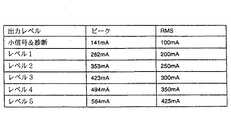
ハンド・ピース/ブレードを駆動するために超音波発生装置により使用される典型的な最大出力レベルを図5に示す。
レベル5の横モード動作を示すハンド・ピースとブレードの組立体は出力レベル1または2において横モード動作を示さず、出力レベル3においては非常に稀にしか横モード動作を示さない。ハンド・ピース/ブレード組立体は出力レベル4においてときどき横モード動作を示す。横モード動作は所定の負荷(この場合、ブレードが自由状態で動作している)に対してハンド・ピース/ブレード組立体に供給される出力がブレードに供給される特定の出力レベルに対して予想されるよりも高いときに示される。
【0037】
各出力レベルは発生装置がハンド・ピースのトランスデューサを駆動する特定の電流と関連しており、ブレードにかかる負荷の変化にわたって制御している。トランスデューサ/ブレードが横振動を示さない場合は、出力レベルが増加しても発生装置により測定されるトランスデューサ/ブレードのインピーダンスは増加しない。この場合、トランスデューサ/ブレードに供給される出力の予想される増加は既知の関係(すなわち、供給された出力は駆動電流の関数)に従う。この関係は発生装置により測定されるトランスデューサ/ブレードのインピーダンスのレベルが発生装置出力レベル環境と関連する駆動電流とは無関係である場合(すなわち、横振動が存在しない場合)に該当する。駆動電流レベルの関数としての供給された出力とトランスデューサ/ブレードのインピーダンスとの数学的関係は図13に示すように二次の関係である。この好適な実施形態では、上記二次の関係は次式の通りである:
PL=(IL)2*Z (1)
式中、PLはトランスデューサ/ブレードに供給される出力、ILはトランスデューサに供給される電流(上記5つの出力レベルのそれぞれにプリセットされている)であり、Zはインピーダンスの実部である。
【0038】
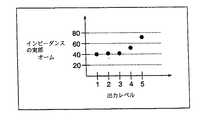
トランスデューサ/ブレードが横振動を示す場合は、出力レベルが増加すると、発生装置により測定されるトランスデューサ/ブレードのインピーダンスのレベルが増加する。その結果、横振動が存在する場合は、トランスデューサ/ブレードに実際に供給される出力は予想される出力を超える。一般に横振動は低出力レベルでは稀にしか存在しない。これにより、低出力レベル環境における基準出力消費測定の性能によって高出力レベル環境に対する合格/不合格の出力消費レベルを確定することが可能となる。基準出力レベルの測定は必須の測定であるが、その理由は発生装置により測定されるトランスデューサ/ブレードのインピーダンスが使用するブレードによって決まるからである。横モード振動の存在についての正確な指標は、いつ出力消費が高出力レベルにおいて予想される閾値よりも大きくなるかである(図14参照)。
【0039】
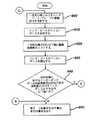
従って、本発明の方法は、工程500に示すように、図3および図4に示すDSPまたはマイクロコンピュータ60に記憶されているプログラムの制御下において、ハンド・ピース/ブレードが中空に保持されている間に、超音波発生装置を使用してこのハンド・ピース/ブレードを励振することにより実施される。ハンド・ピース/ブレードが依然として中空に保持されている間に、工程510に示すように、ハンド・ピース/ブレードに供給される出力を出力レベル1において測定する。工程520に示すように、出力レベル1において測定されたハンド・ピース/ブレードに供給される出力を用いて、出力レベル5に対する予想される出力を計算し、この予想される出力に基づいて、出力レベル5に対して合格/不合格の閾値を設定する。これらの合格/不合格の閾値は、ハンド・ピース/ブレードに横振動が存在しない場合に測定される、上記計算された予想出力の所定のパーセント上に設定される。この好適な実施形態において、この閾値は予想測定出力の約10%上に設定される。
【0040】
出力レベル5においてハンド・ピース/ブレードに供給される実際の出力を工程530に示すように測定する。次に、工程540に示すように、この実際に測定された出力を出力レベル5に対する上記合格/不合格の閾値と比較する。実際に測定された出力がそれぞれの上記合格/不合格の閾値(工程550)よりも大きい場合は、工程555に示すように、発生装置の動作を停止し、「横モード振動がハンド・ピース/ブレードに存在します(Transverse Mode Vibrations Present in Hand Piece/Blade)」というエラー・コードをこの発生装置に記憶するとともにコンソールのLCD上に「ハンド・ピース不良(Bad Hand Piece)」というメッセージを表示する。一方、工程560に示すように、実際に測定された出力のいずれもそれぞれの上記合格/不合格の閾値よりも大きくない場合は、ハンド・ピースは横モード振動を含まないので良好である。
【0041】
インピーダンス測定値および位相測定値を得るために、図3および図4のDSP60および他の回路要素を用いる。特にプッシュ−プル増幅器78が超音波信号を電源変圧器86に送り、この電源変圧器86が今度は信号をケーブル26中の配線85を介してハンド・ピースの中の圧電トランスデューサ36に送る。配線85の電流とその配線の電圧を電流感知回路88と電圧感知回路92とによりそれぞれ検出する。電流および電圧感知信号を平均電圧回路122と平均電流回路120とにそれぞれ送り、これらの回路がこれらの平均値をとる。平均電圧はアナログ−デジタル変換器(ADC)126によりデジタル・コードに変換され、このデジタル・コードがDSP60に入力される。同様に、電流平均信号はアナログ−デジタル変換器(ADC)126によりデジタル・コードに変換され、このデジタル・コードがDSP60に入力される。DSPにおいて、電流に対する電圧の比を継続して計算して振動数が変化に応じた現在のインピーダンス値を得る。共鳴状態に近づくとインピーダンスに有意の変化が起きる。
【0042】
電流センス88および電圧センス92もそれぞれのゼロ・クロス検出器100,102にも供給される。これらの検出器はそれぞれの信号がゼロと交差するとパルスを生成する。検出器100からのパルスは位相検出論理回路104に供給され、位相検出論理回路104はそのパルスにより開始されるカウンタを備えていてもよい。検出器102からのパルスも同様に位相検出論理回路104に供給され、上記カウンタを停止するために使用することができる。その結果、カウンタにより到達されたカウントは配線104上のデジタル・コードであり、このデジタル・コードは電流と電圧の間の位相差を表す。この位相差の大きさも共鳴の指標である。例えばプッシュプル増幅器78を駆動する直接デジタル合成(DDS)回路128への振動数信号を発生するために位相デルタをDSPの位相設定点と比較することにより、これらの信号を、発生装置の振動数を共鳴状態にロックする位相ロック・ループの一部分として使用することができる。
【0043】
さらに、インピーダンス値と位相値を上述のように動作の診断フェーズにおいてブレードの取り付けが緩んでいるか検出するために使用することができる。そのような媒、DSPは位相ロックを共鳴状態に確立しようとせず、むしろハンド・ピースを特定の振動数で駆動してブレードの取り付けが緊密であるかを決定するためにインピーダンスと位相を測定する。
【0044】
図8および図9は本発明の別の実施形態を説明するフロー・チャートである。良好なトランスデューサとブレードとを中空または組織内で駆動する場合、振動数対供給出力曲線は既知の関係式に従う。従って、3つの近接する振動数(すなわち、一次的共鳴状態とわずかに共鳴状態から離れて一次的共鳴の上または下の状態)においてハンド・ピースのインピーダンスを測定する際に、他の振動数におけるハンド・ピースの予想されるインピーダンスはこれらの先行する測定値から外挿することにより得ることができる。一般に、そのような相対的関係が広範囲のブレードとシャリング機に対して存在する。
【0045】
横モードの共鳴を検出するためにそのような振動数−シフトを利用することの利点はブレードが組織内にある間に検査を実行することができる点にある。この一次的共鳴からシフトしてずらすことは非常に短時間で達成される。その結果、組織による負荷は瞬間的なシフトの間に認識可能なほどには変化しない。従って、組織による負荷の効果は共鳴振動と得られる横モード検出能力とに実質的に影響を及ぼすことはない。その結果、システム使用時に、特に横モードにより発生する熱の問題がもっとも生じやすいレベル5またはレベル4において、診断手順を実行することが可能である。本発明の方法は、使用者が開始した診断および/または例えばブレードが中空に保持されまたは組織に摂食している間のように他の所望の時点で発生装置がハンド・ピース/ブレードを駆動中に、例えば10秒毎にのように、周期的に実行することが可能である。
【0046】
レベル1、レベル2またはレベル3において使用する際よりも実質的な横モード動作を励起し誘起する可能性がより高いレベル5および/またはレベル4における使用の際のような使用の際に周期的に短期間、駆動振動数を一次的共鳴からわずかに離れるように移動する。この好適な実施形態において、一次的共鳴を約50ヘルツ乃至500ヘルツ変化させ、上記短期間は約10ミリ秒(msec)乃至0.5秒である。出力電力、出力電流または他のパラメータが実質的にシフトした場合(すなわち、例えばインピーダンスが認識し得るほど増加した場合)、横振動数は一次的振動数からの励振を介して駆動されつつあるか、または駆動されつつある状態に近い。例えば、発生装置はブレードを一次的な意図された共鳴において駆動を続けることができ、横モード共鳴に近づくと振動数がその横モード共鳴に向けてわずかにシフトすることによりさらに励振されることが大いにあり得る。一次的共鳴からわずかにシフトするだけでも近接する任意の横モード共鳴に相当なエネルギーカップリングが引き起こされる。一次的共鳴からわずかに共鳴から離れた振動数へシフトする際のインピーダンスの差および/または出力変化を測定し、これを適切に動作している非横モード状態のシステムについてのインピーダンスの変化と比較する。横モード共鳴が問題となっており、または問題になりそうな場合は、共鳴からわずかに離れるインピーダンスの変化は良好対問題のある横モードハンド・ピースに対して異なる。この好適な実施形態において、測定された変化は出力レベル、電流レベル、インピーダンス、位相その他である。
【0047】
適切に動作している非横モード状態のシステムとの比較は確立された合格/不合格の基準に基づいておよび/または先ず特定のブレードを用いて信頼し得る基準線測定値を得ることにより実行してもよい。例えば、予想される一次的共鳴の概略的近傍において駆動信号の振動数を掃引し、存在する共鳴を認識することによりもっとも近い横振動数を決定する。そのような掃引はブレードがハンド・ピースに最初に取り付けられたときに実行する。その後、発生装置はシフトが起きていないかモニターするためにハンド・ピース/ブレードをこれらの特定の横振動数で周期的に駆動する。あるいはまた、ハンド・ピースに取り付けられたブレードのタイプが既知である場合は、そのブレードに対する合格/不合格の閾値を使用に先立ってブレードを実際に掃引することなく、より詳細に規定することができる。
【0048】
図3および図4に示すDSPまたはマイクロプロセッサ60に記憶したプログラムの制御の下に、本発明の方法を、工程600に示すように、超音波駆動ユニットを用いて一次的共鳴振動数においてハンド・ピース/ブレードを駆動することにより実施される。好適な実施形態において、この一次的共鳴振動数は55Khzである。
【0049】
工程610に示すように、ハンド・ピースに供給される出力を測定する。工程620に示すように、一次的駆動振動数を約200Hz下げてシフトする。工程630に示すように、ハンド・ピースのインピーダンスの測定を実行する。工程640に示すように、この一次的共鳴におけるハンド・ピースのインピーダンが、一次的振動数を200Hz下回る振動数において測定されたハンド・ピースのインピーダンスよりも20%以下低いか否かを決定するために検査する。
【0050】
一次的共鳴におけるハンド・ピースのインピーダンスが一次的振動数を200Hz下回る振動数において測定されたハンド・ピースのインピーダンスよりも20%より多く低い場合は、工程650に示すように、横モードの誤動作が存在することを示すために警告または警報が発せられる。一次的共鳴におけるハンド・ピースのインピーダンスが、一次的振動数を200Hz下回る振動数において測定されたハンド・ピースのインピーダンスよりも20%以下低い場合は、駆動振動数は、工程660に示すように、一次的共鳴振動数の約200Hz上側にシフトされる。工程670に示すように、ハンド・ピースのインピーダンスを測定する。工程680に示すように、この一次的共鳴におけるハンド・ピースのインピーダンスが、一次的共鳴振動数の約200Hz上側の振動数において測定されたハンド・ピースのインピーダンスよりも20%以下低いか否かを決定するために検査する。
【0051】
測定された一次的共鳴におけるハンド・ピースのインピーダンスが一次的共鳴振動数の約200Hz上側の振動数において測定されたハンド・ピースのインピーダンスよりも20%以下低い場合は、休止が開始され(工程685)、工程600への帰還が起こる。この好適な実施形態において、この休止は約10秒である。一方、一次的共鳴におけるハンド・ピースのインピーダンスが一次的共鳴振動数の約200Hz上側の振動数において測定されたハンド・ピースのインピーダンスよりも20%よりも多く低い場合は、工程650への帰還が起こり、横モードの誤動作が存在することを示すために工程650で警告または警報が発せられる。あるいはまた、ハンド・ピースに供給される出力を一定した駆動を用いることにより測定してもよい。横モード振動が存在する場合は、ハンド・ピースに供給される出力は認識し得る程度により大きくなっている。
【0052】
図10は本発明の別の実施形態を説明するフロー・チャートである。良好な振動数とブレードとを自由状態の空気内で駆動する場合、供給出力対駆動電流レベル曲線とハンド・ピース/ブレードのインピーダンス対駆動電流レベル曲線は既知の数学的関係に従う。図13に示すように、ハンド・ピース/ブレードのインピーダンス対駆動電流レベル曲線の場合、この数学的関係はほぼ直線(すなわち、発生装置により測定されたインピーダンスは駆動電流レベルと無関係)であり、供給出力対駆動電流レベル曲線の場合は、この数学的関係は2次である。これらの数学的関係はハンド・ピースと一緒に使用するブレードのタイプにかかわらず該当する。
【0053】
横モード動作が存在すると、供給出力対駆動電流レベル曲線とハンド・ピース/ブレードのインピーダンス対駆動電流レベル曲線は既知の数学的関係に従わない。横モード動作は、図14に示すように、所定の負荷(この場合、ブレードが自由状態でまたは中空において動作している間)に対して振動数とブレードの組立体に入る出力がブレードに供給されている特定の出力レベルに対して予想されるよりも高い(すなわち、より高いインピーダンスとより高い出力)。
【0054】
従って、図3および図4に示すDSPまたはマイクロプロセッサ60に記憶したプログラムの制御の下に、ブレードが中空に自由状態で保持されている間に、本発明の方法を、工程700に示すように、最小駆動電流レベルから最大駆動電流レベルまでハンド・ピース/ブレードに供給される駆動電流レベルを掃引するために超音波駆動ユニットを用いることにより実施する。この好適な実施形態において、最小駆動電流レベルは100mA RMSおよび最大駆動電流レベルは425mA RMSである。
【0055】
電流掃引の際、工程710に示すように、振動数の電圧レベルと電流駆動レベルとをモニターして発生装置内に配置された不揮発性メモリ記憶する。工程720に示すように、記憶された電圧および電流データを用いて、振動数に供給される出力を計算し、供給出力対駆動電流レベル曲線とハンド・ピース/ブレードのインピーダンス対駆動電流レベル応答曲線を作成する。
【0056】
作成された応答曲線を用いて、工程730に示すように、ハンド・ピース/ブレードが、熱を発生することがある横モード振動を示すか否か決定するために外挿を実行する。この外挿は、それらの曲線が直線に均等な関係を表すわすか否か(例えば、インピーダンスの比較のために)、または二次の関係(例えば、出力の比較のために)を決定するために作成された応答曲線を検査することを含む。この好適な実施形態では、二次関係は式1に従う。横モード動作が存在する場合(工程740)は、すなわち、曲線は予想される数学的関係に従わない(すなわち、関係は超過している)場合は、工程745に示すように、発生装置の動作を停止し、「横モード振動がハンド・ピース/ブレードに存在します(Transverse Mode Vibrations Present in Hand Piece/Blade)」というエラー・コードをこの発生装置に記憶するとともにコンソールのLCD上に「ハンド・ピース不良(Bad Hand Piece)」というメッセージをコンソールのLCD上に表示する。一方、上記曲線が予想される数学的関係と一致する場合、工程750に示すように、ハンド・ピース/ブレードは良好であるが、その理由はハンド・ピース/ブレードが横モード振動を含まないからである。
【0057】
図11および図12はそれぞれ本発明の好適な実施形態を説明するフロー・チャートである。図3および図4に示すDSPまたはマイクロプロセッサ60に記憶したプログラムの制御の下に、本発明の方法を、工程800に示すように、ハンド・ピース/ブレードが中空に保持されている間に、超音波発生装置を使用してこのハンド・ピース/ブレードを励振することにより実施される。ブレードが依然として中空に保持されている間に、工程810に示すように、ハンド・ピース/ブレードに供給される出力を出力レベル1において測定する。工程820に示すように、出力レベル1において測定されたハンド・ピース/ブレードに供給される出力を用いて、出力レベル5に対する予想される出力を計算し、この予想される出力に基づいて、出力レベル5に対して合格/不合格の閾値を設定する。これらの合格/不合格の閾値は、ハンド・ピース/ブレードに横振動が存在しない場合に測定される、上記計算された予想出力の所定のパーセント上に設定される。この好適な実施形態において、この閾値は予想測定出力の約10%上に設定される。
【0058】
出力レベル5においてハンド・ピース/ブレードの実際のインピーダンスを工程830に示すように測定する。次に、工程840に示すように、この実際に測定されたインピーダンスを出力レベル5に対する上記合格/不合格の閾値と比較する。実際に測定されたインピーダンスがそれぞれの上記合格/不合格の閾値(工程850)よりも大きい場合は、工程855に示すように、発生装置の動作を停止し、「横モード振動がハンド・ピース/ブレードに存在します(Transverse Mode Vibrations Present in Hand Piece/Blade)」というエラー・コードをこの発生装置に記憶するとともにコンソールのLCD上に「ハンド・ピース不良(Bad Hand Piece)」というメッセージを表示する。一方、工程860に示すように、実際に測定された出力のいずれもそれぞれの上記合格/不合格の閾値よりも大きくない場合は、ハンド・ピースは横モード振動を含まないので良好である。
【0059】
さらなる実施形態において、回路が横状態で駆動しているか、または横モードが生じようとしているかを決定する。特に、システム使用時に周期的に、好ましくは実質的な横モード動作をより励振しやすいレベル5で動作するときに、駆動振動数を短期間、わずかに共鳴から離れるように変化(すなわち、一次的/主共鳴の上側/下側)させる。ここで、ブレードは依然として実質的にその主共鳴振動数において駆動する。横モード振動数がすぐ近くにあると、駆動振動数をわずかにシフトすることにより、より多く励振されることがおおいに起こり得る。の意図は一次的共鳴ピーク(例えば、約100Hz乃至500Hz)から広がりすぎず、一次的共鳴および任意の隣接する横モード振動数に対して依然として顕著な量のエネルギーカップリングが起きるようにすることである。
【0060】
次に、一次的共鳴振動数からこの共鳴振動数わずかに離れた振動数へ移動するときのインピーダンスおよび/または出力の差を検査する。例えば、適切に動作している非横モード状態の、問題のないシステムについて測定された出力変化を予想される出力変化との比較を実行する。横モードが問題となっているか、またはまさに問題となりつつある場合、共鳴からわずかに離れるインピーダンスの変化は良好(good)対問題のある(problematic)ハンド・ピース/ブレードに対して異なる。この共鳴からわずかに離れる検査は短期間であり、比較的使用者にとって判りやすい。この好適な実施形態において、共鳴状態での測定値とわずかに共鳴から離れた状態の測定値との比較を出力、インピーダンス、位相シフト又は他の変数の間で実行する。この比較は絶対値、デルタ、変化率および/または2次微分係数の少なくとも1つの間で実行する。
【0061】
横モード振動数が検出されると、一次的共鳴駆動振動数がこの共鳴振動数からわずかに中心から離れるようにシフトされるように当該一次的共鳴駆動振動数をシフトすることにより、横モード活動を減衰することができる。この好適な実施形態において、振動数を横モード感受性の方向と反対の方向にシフトする。横モード活動に対する検査を繰り返し、この減衰により横モード動作が停止されない場合は、超音波システムの動作を停止しおよび/または使用者は不所望の状態に対して警告がなされる。この実施形態はブレードの過熱、ブレードの損傷、またはハンド・ピースの過熱を安全に回避する手段を提供する。
【0062】
別の実施形態において、多レベル駆動出力(Multiple Level Drive Power)対供給出力(Power Delivered)関係および/または多レベル駆動出力(Multiple Level Drive Power)対インピーダンス(Impedance)関係を潜在的な横モード問題を、使用する出力レベルの正常な範囲を超える1つまたは複数の出力駆動レベルにおけるハンド・ピースの「オーバードライブ(over-drive)」とともに、潜在的な横モードの問題を検出または予言するのに用いる。これらの「オーバードライブ」出力レベルは問題のある、または問題を生じる可能性のある横モード状態を迅速に認識するのに特に有効である。
【0063】
別の実施形態において、高出力駆動信号がハンド・ピースに供給されている間にハンド・ピースに供給される出力を複数の振動数において測定する。あるいはまた、「オーバードライブ」を用いる。ここでは、3つの振動数、すなわち、第1の振動数、第2の振動数および第3の振動数を相互に近接して測定する。第1の振動数はハンド・ピース/ブレードの一次的共鳴振動数であり、主要または意図する長手方向共鳴振動数と別称される。第2の振動数は第1の振動数の少し下にある。第3の振動数は第1の振動数の少し上にある。
【0064】
一般に、出力レベル5は使用時に出力される最大出力である。この出力はハンド・ピースに供給される出力の測定を実行することを意図されたレベルのうちの最大のレベルである。しかしながら、この実施形態によると、レベル5を超える出力(すなわち、電流)はハンド・ピース/ブレードに短期間(例えば、100ミリ秒(msec))供給される。この短期間供給される出力は組織に対して与える衝撃は最小であるが、ハンド・ピースに対して実質的により多くの出力を供給して隣接する横モード共鳴振動数とより有効に係合し、より有効に潜在する横モードの問題を認識することができる。その結果、レベル5と関連して正常な最大範囲において駆動した場合に、この意図的な過剰な駆動が迅速に横モード共鳴の応答を誘起する、他の方法ではみられないかまたは十分に優れてはいない、より高い能力を有するため、「オーバードライブ(over-drive)」は潜在的に問題のある横モードを認識するより高い能力を提供する。あるいはまた、多数の「オーバードライブ(over-drives)」を、出力レベル同士の間の非線形性を迅速に認識し、それにより潜在的な横モード状態を明示し、低動作レベルにおける測定を実行する必要性を低減化するために使用することが可能である。
【0065】
あるいはまた、ハンド・ピース/ブレードを使用時に出力レベル5の最大値を約10%上回る一つの「オーバードライブ(over-drive)」出力レベルにおいて瞬間的に駆動駆動する。横モードが存在するか、またはその予兆がある場合は、そのような「オーバードライブ(over-drive)」により、レベル5において正常に予想されるよりも顕著に高い出力または異なるインピーダンスが迅速に明らかになる。実施形態の一例において、比較は、例えば自動ブレード認識によりまたは手動で記入したブレードタイプのような、ブレードのタイプに対して示された普通に予想される合格/不合格の限界の表に基づいている。
【0066】
本発明の別の実施形態において、横モード振動の存在は振動数駆動電圧と振動数の駆動電流の両方をモニターしてハンド・ピース/ブレードのインピーダンス対駆動電流レベル曲線または供給出力対駆動電流レベル曲線が比較的に急勾配の、予想される曲線から逸れているか否か検出することにより決定する。この実施形態によると、ブレードが中空にまたは組織内に保持されている間、振動数を最小振動数から最大振動数まで掃引する。振動数の掃引時、振動数の電圧レベルと電流レベルをモニターし、発生装置またはブレードの中に配置されたメモリに記憶する。この記憶された電圧および電流データを用いてハンド・ピースに供給される出力を計算し、供給出力対駆動電流レベル曲線とハンド・ピース/ブレードのインピーダンス対駆動電流レベル応答曲線を作成する。これらの作成された応答曲線を用いて、ハンド・ピース/ブレードが横モード振動を示すか否か、または限界状態にあり従ってまさに横モード動作を示そうとしているかを決定するために外挿を実行する。そのような横モードによりシステムの望まない位置において熱が発生することがあり、これは非常に危険であり得る。横モード共鳴が存在することが決定された場合、警告または警報が発生装置により発せられ、使用者はシステムの使用を停止しまたは他の適切な措置を講ずることが可能となる。別の実施形態において、発生装置は自動的にハンド・ピースの駆動を停止する。
【0067】
別の実施形態において、横モード振動状態の存在は多数の出力レベルにおいて測定されたインピーダンスの比率を計算し、これらの計算された比率に基づいて横振動の存在を決定することにより検出する。好適な実施形態において、レベル5におけるインピーダンスを測定し、そしてレベル1におけるインピーダンスを測定する。次に、測定された出力レベルを所定の閾値と比較して横振動が存在するか否かを決定する。好適な実施形態において、この所定の閾値は1.6である。
【0068】
本発明のさらに別の実施形態において、横モード共鳴の開始を回避または低減するために予言的手段を用いる。横モード共鳴は一次的共鳴に近いまたはそれにおける振動数により励振されることが多い。そのような共鳴同士の間の振動数の「ギャップ(gap)」は使用時にブレードの加熱により縮まり、このため最終的には横モード振動数においてハンド・ピース/ブレードを偶発的に駆動する結果となることがある。もっとも近い横モード共鳴振動数を周期的にモニターすることにより、そのような共鳴振動数間のギャップを決定することができ、ハンド・ピース/ブレードを横モード振動数において偶発的に駆動するための相対的ポテンシャルを測定することができ、潜在的な横モードの問題点を予言するのに使用することができる。例えば、駆動レベルが高いとブレードが速く加熱しやすく、このためギャップがより迅速に減少する。この予言的情報を用いてその後振動数の駆動を停止し、使用者に潜在的な横モード問題がまさに起きようとしていることを警告し、または一次的駆動振動数を変えて駆動振動数を理想的共鳴からわずかに離れるようにバイアスして、横モード振動数からさらに離れた振動数にしてもよい。ギャップの大きさ、ギャップの変化率および/またはギャップの2次微分係数を相対的ポテンシャルおよび/または横モードの存在についての予言的情報を得るために使用することができる。
【0069】
本発明の好適な実施形態において、電流(すなわち、「出力レベル(power level)」は出力に関係式 P=I2*Z、式中電流Iはrmsアンペアであり、Zはインピーダンスの実部である。従って、第1の低レベルにおいて、P1=I12*Z1である。第2の低レベルにおいて、P2=I22*Z2である。Zが増加しない(または減少しない)場合は、P2/P1=(I2/I1)2である。従って、P1およびP2の実際の測定値がP2/P1>(I2/I1)2である場合、横振動がハンド・ピースに存在する。
【0070】
本発明の方法を使用すると、出力レベル検査で不合格となったハンド・ピースが横振動モードを示すか否かの指標が提供される。さらに、ブレードのタイプにかわらず該当する数学的関係の結果、本発明の方法は任意のハンド・ピース/ブレード組立体と一緒に使用することができる。さらに、本発明の方法はブレードの過熱を防止することによりハンド・ピースの安全な動作を確実にし、それによりブレードに対する損傷またはハンド・ピースを使用する個人に対する障害が回避される。
【0071】
以上において、本発明を詳細に図示および説明したが、これらは例示を目的としていることが明らかに理解でき、(本発明を)制限するためのものではないと考えるべきである。本発明の範囲および趣旨は本明細書において記載する特許請求の範囲およびその実施態様における用語のみにより限定される。
【0072】
本発明の実施態様は以下の通りである。
実施形態(A)は、以下の通りである。
超音波ハンド・ピースにおける横振動を検出するための方法において、駆動信号を超音波発生装置により超音波ハンド・ピースに供給する工程と、ハンド・ピース/ブレードが中空(midair)に保持されている間に第1の出力レベルにおいてハンド・ピース/ブレードに供給される出力を測定する工程と、第1の出力レベルにより予想される出力を計算する工程と、予想された出力に基づいて実際の測定値に対する合格/不合格の閾値を設定する工程と、ハンド・ピース/ブレードに供給される実際の出力を測定する工程と、測定された実際の出力が合格/不合格の閾値よりも小さい場合に、発生装置の液晶ディスプレイ上に第1のメッセージを表示する工程と、測定された実際の出力が合格/不合格の閾値よりも大きい場合に、発生装置の液晶ディスプレイ上に第2のメッセージを表示する工程を含む方法。
(1)前記第1のメッセージをが「ハンド・ピース/ブレード合格(Hand Piece/Blade Passed)」メッセージである実施形態(A)に記載の方法。
(2)前記第1の出力レベルが約100maRMSである実施形態(A)記載の方法。
(3)前記計算工程が予想される出力をレベル5の環境に対して計算する工程を含む実施態様(2)に記載の方法。
(4)前記第2のメッセージを表示する工程が「横モード振動がハンド・ピース/ブレードに存在します(Transverse Mode Vibrations Present in Hand Piece/Blade)」エラー・コードを発生装置内に記憶する工程と、「ハンド・ピース不良(Bad Hand Piece)」というメッセージを発生装置の液晶ディスプレイ上に表示する工程を含む実施形態(A)記載の方法。
(5)前記駆動信号が約20KHz乃至70KHzの振動数を有する実施形態(A)記載の方法。
【0073】
(6)前記合格/不合格の閾値が予想される出力の約10%である実施形態(A)記載の方法。
(7)前記レベル5環境が約425maRMSである実施態様(2)記載の方法。
実施形態(B)は以下の通りである。
超音波ハンド・ピースにおける横振動を検出するための方法において、一次的共鳴振動数における駆動信号を超音波発生装置により超音波ハンド・ピースに供給する工程と、一次的共鳴振動数におけるハンド・ピース/ブレードのインピーダンスを測定する工程と、駆動信号の一次的共鳴振動数をシフトする工程と、一次的共鳴振動数において測定されたハンド・ピースのインピーダンスをシフトされた共鳴振動数におけるハンド・ピースのインピーダンスと比較する工程と、測定されたインピーダンス所定の閾値よりも大きい場合に、発生装置の液晶ディスプレイ上にメッセージを表示する工程を含む方法。
(8)前記シフト工程が駆動振動数を第1の振動数を通り越して下方にシフトする工程を含む実施形態(B)記載の方法。
(9)前記第1の振動数が約200Hzである実施態様(8)記載の方法。
(10)前記一次的共鳴が約55kHzである実施形態(B)記載の方法。
【0074】
(11)前記比較工程が、一次的共鳴におけるハンド・ピースのインピーダンスがシフトした共鳴振動数におけるハンド・ピースのインピーダンスよりも20%以下低いか否かを決定する工程と、一次的共鳴におけるハンド・ピースのインピーダンスがシフトした共鳴振動数におけるハンド・ピースのインピーダンスよりも20%以下低い場合に、横モードの誤動作が存在することを示すために警報を開始する工程を含む請求項2記載の方法。
(12)駆動振動数を上方にシフトする工程をさらに含む実施形態(B)記載の方法。
(13)前記シフト工程が駆動振動数を所定の振動数だけ一次的共鳴の上にシフトする工程と、所定の振動数においてハンド・ピースのインピーダンスを測定する実施態様(12)記載の方法。
(14)前記所定の振動数が約200Hzである実施態様(12)記載の方法。
(15)一次的振動数において測定されたインピーダンスを一次的振動数の上の所定の振動数において測定されたインピーダンスと比較する工程をさらに含む実施態様(13)記載の方法。
【0075】
(16)前記比較工程が一次的共鳴におけるハンド・ピースのインピーダンスが、一次的共鳴の上の、所定の振動数におけるハンド・ピースのインピーダンスよりも20%以下低いか否かを決定する工程を含む実施態様(15)記載の方法。
(17)前記所定の振動数が約200Hzである実施態様(16)記載の方法。
(18)一次的共鳴におけるハンド・ピースのインピーダンスが一次的共鳴振動数の約200Hz上側の振動数において測定されたハンド・ピースのインピーダンスよりも20%以下低い場合に、休止を開始する工程と、一次的共鳴振動数における駆動信号を超音波発生装置により超音波ハンド・ピースに供給する工程に帰還する工程をさらに含む実施態様(16)記載の方法。
(19)前記休止が少なくとも10秒である実施態様(18)記載の方法。
(20)前記一次的共鳴におけるハンド・ピースのインピーダンスが、一次的共鳴の上の、所定の振動数におけるハンド・ピースのインピーダンスよりも20%より多く低い場合に、前記警報を開始する工程に帰還する工程をさらに含む実施態様(16)記載の方法。
【0076】
(21)前記駆動信号が一定の電流レベルを有する請求項2記載の方法。
実施形態(C)は、以下の通りである。
超音波ハンド・ピースにおける横振動を検出するための方法において、超音波ハンド・ピース/ブレードに供給される電圧および電流を有する駆動信号を超音波発生装置により掃引する工程と、ハンド・ピース/ブレードに供給される電圧と電流をモニターし、超音波発生装置内に配置された不揮発性メモリに記憶する工程と、ハンド・ピースに供給される出力を記憶された電圧および記憶された電流に基づいて計算する工程と、記憶された電圧および記憶された電流に基づいて応答曲線を作成する工程と、応答曲線により外挿を実行してハンド・ピース/ブレードが横モードを示すか否かを決定する工程と、ハンド・ピース/ブレードが横モードを示す場合、発生装置の液晶ディスプレイ上にメッセージを表示する工程を含む方法。
(22)前記メッセージが「ハンド・ピース/ブレードは横モード振動を含んでいます(Hand Piece/Blade Contains Transverse Mode Vibration)」メッセージである実施形態(C)記載の方法。
(23)前記供給工程が駆動信号を最小駆動電流レベルから最大駆動電流レベルまで供給する実施形態(C)記載の方法。
(24)前記最小駆動電流レベルが約100maRMSであり、かつ最大駆動電流レベルが約425maRMSである実施態様(23)記載の方法。
(25)前記応答曲線が供給電圧(Power-Delivered)対駆動電流(Drive Current)曲線とハンド・ピース/ブレードインピーダンス(Hand Piece/Blade Impedance)対駆動電流(Drive Current)曲線の少なくとも1つである実施形態(C)記載の方法。
【0077】
(26)前記外挿が作成された応答曲線を検査して直線および二次関係の少なくとも1つを表す任曲線が存在するか否かを決定する工程を含む実施形態(C)記載の方法。
実施形態(D)は、以下の通りである。
超音波ハンド・ピースにおける横振動を検出するための方法において、駆動信号を超音波発生装置により超音波ハンド・ピースに供給する工程と、ハンド・ピース/ブレードが中空に保持されている間、第1の出力レベルにおいてハンド・ピース/ブレードのインピーダンスを測定する工程と、第1の出力レベルにより第2の出力レベルにおいて予想されるインピーダンスを計算する工程と、計算された予想されるインピーダンスに基づいてハンド・ピース/ブレードのインピーダンスの増加に対して合格/不合格の閾値を設定する工程と、第2の出力レベルにおけるハンド・ピース/ブレードのインピーダンスを測定する工程と、第2の出力レベルにおける測定されたインピーダンスを合格/不合格の閾値と比較する工程と、ハンド・ピース/ブレードの測定されたインピーダンスが合格/不合格の閾値よりも小さい場合に、発生装置の液晶ディスプレイ上に第1のメッセージを表示する工程と、測定された実際の出力が合格/不合格の閾値よりも大きい場合に、発生装置の液晶ディスプレイ上に第2のメッセージを表示する工程を含む方法。
(27)前記第1のメッセージをが「ハンド・ピース/ブレード合格(Hand Piece/Blade Passed)」メッセージである実施形態(D)に記載の方法。
(28)前記第1の出力レベルが約100maRMSである実施形態(D)記載の方法。
(29)前記計算工程が予想される出力をレベル5の環境に対して計算する工程を含む実施態様(28)に記載の方法。
(30)前記第2のメッセージを表示する工程が「横モード振動がハンド・ピース/ブレードに存在します(Transverse Mode Vibrations Present in Hand Piece/Blade)」エラー・コードを発生装置内に記憶する工程と、「ハンド・ピース不良(Bad Hand Piece)」というメッセージを発生装置の液晶ディスプレイ上に表示する工程を含む実施形態(D)記載の方法。
【0078】
(31)前記駆動信号が約20KHz乃至70KHzの振動数を有する実施形態(D)記載の方法。
(32)前記合格/不合格の閾値が予想される出力の約10%である実施形態(D)記載の方法。
(33)前記レベル5の環境が約425maRMSである実施態様(28)記載の方法。
【0079】
【発明の効果】
従って、本発明によれば、過熱したブレードにより生じる組織の損傷のような不所望の効果の発生を防止できる、超音波ハンド・ピースにおける横振動を検出するための方法が提供できる。
【図面の簡単な説明】
【図1】本発明の方法を実施するための超音波外科切断および止血システム用のコンソール、およびハンド・ピースおよびフット・スイッチの斜視図である。
【図2】図1の超音波外科切断および止血システムの超音波外科用メスのハンド・ピースにおける概略的切断図である。
【図3】本発明の方法を実施するための超音波発生装置を示すブロック図である。
【図4】本発明の方法を実施するための超音波発生装置を示すブロック図である。
【図5】ハンド・ピースを駆動する種々の出力レベルと関連する最大電力環境を示すである。
【図6】本発明の方法の実施形態の一例を示すフロー・チャートである。
【図7】本発明の方法の実施形態の一例を示すフロー・チャートである。
【図8】本発明の実施形態の一例を示すフロー・チャートである。
【図9】本発明の実施形態の一例を示すフロー・チャートである。
【図10】本発明の別の実施形態を示すフロー・チャートである。
【図11】本発明の好適な実施形態の一例を示すフロー・チャートである。
【図12】本発明の好適な実施形態の一例を示すフロー・チャートである。
【図13】ハンド・ピース/ブレードに横振動が存在しない場合の種々の発生装置出力レベル環境におけるトランスデューサ/ブレードの出力消費をプロットした図である。
【図14】ハンド・ピース/ブレードに横振動が存在する場合の種々の発生装置出力レベル環境におけるトランスデューサ/ブレードの出力消費をプロットした図である。
【図15】ハンド・ピース/ブレードに横振動が存在しない場合の種々の発生装置出力レベル環境におけるトランスデューサ/ブレードのインピーダンスをプロットした図である。
【図16】ハンド・ピース/ブレードに横振動が存在する場合の種々の発生装置出力レベル環境におけるトランスデューサ/ブレードのインピーダンスをプロットした図である。
【符号の説明】
10 コンソール
20 ケーブル
30 ハンド・ピース
32 外科メス用ブレード
40 フット・スイッチ
50 ケーブル
Claims (23)
- 超音波ハンド・ピースにおける横振動を検出するための方法において、
駆動信号を超音波発生装置により超音波ハンド・ピースに供給する工程と、
ハンド・ピース/ブレードが中空(midair)に保持されている間に第1の電気的特性レベルにおいてハンド・ピース/ブレードに供給される電気的特性を測定する工程と、
第1の電気的特性レベルにより予想される電気的特性を計算する工程と、
予想された電気的特性に基づいて実際に測定される電気的特性に対する合格/不合格の閾値を設定する工程と、
ハンド・ピース/ブレードに供給される実際の電気的特性を測定する工程と、
測定された実際の電気的特性を合格/不合格の閾値と比較する工程と、
測定された実際の電気的特性が合格/不合格の閾値よりも小さい場合に、発生装置の液晶ディスプレイ上に第1のメッセージを表示する工程と、
測定された実際の電気的特性が合格/不合格の閾値よりも大きい場合に、発生装置の液晶ディスプレイ上に第2のメッセージを表示する工程を含む方法。 - 前記第1のメッセージが「ハンド・ピース/ブレード合格」メッセージである請求項1に記載の方法。
- 前記第1の電気的特性レベルが出力レベルである請求項1に記載の方法。
- 前記計算工程がレベル5の環境に関して予想される電気的特性を計算する工程を含む請求項3に記載の方法。
- 前記電気的特性が出力である請求項4に記載の方法。
- 前記レベル5の環境が約425maRMSである請求項3に記載の方法。
- 前記出力レベルが約100maRMSである請求項3に記載の方法。
- 前記第2のメッセージを表示する工程が「横モード振動がハンド・ピース/ブレードに存在します」というエラー・コードを発生装置内に記憶する工程と、「ハンド・ピース不良」というメッセージを発生装置の液晶ディスプレイ上に表示する工程を含む請求項1に記載の方法。
- 前記駆動信号が約20KHz乃至70KHzの振動数を有する請求項1に記載の方法。
- 前記合格/不合格の閾値が予想される電気的特性の約10%である請求項1記載の方法。
- 前記電気的特性が出力である請求項10に記載の方法。
- 超音波ハンド・ピースにおける横振動を検出するための方法において、
一次的共鳴振動数における駆動信号を超音波発生装置により超音波ハンド・ピースに供給する工程と、
一次的共鳴振動数におけるハンド・ピース/ブレードのインピーダンスを測定する工程と、
駆動信号の一次的共鳴振動数をシフトする工程と、
シフトされた共鳴振動数においてハンド・ピースのインピーダンスを測定する工程と、
一次的共鳴振動数において測定されたハンド・ピースのインピーダンスをシフトされた共鳴振動数におけるハンド・ピースのインピーダンスと比較する工程と、
測定されたインピーダンスが所定の閾値よりも大きい場合に、発生装置の液晶ディスプレイ上にメッセージを表示する工程を含む方法。 - 超音波ハンド・ピースにおける横振動を検出するための方法において、
超音波ハンド・ピース/ブレードに供給される電圧および電流を有する駆動信号を超音波発生装置により掃引する工程と、
ハンド・ピース/ブレードに供給されるパラメータをモニターし、超音波発生装置内に配置された不揮発性メモリに記憶する工程と、
ハンド・ピースに供給される電気的特性を記憶されたパラメータに基づいて計算する工程と、
記憶されたパラメータに基づいて応答曲線を作成する工程と、
応答曲線により外挿を実行してハンド・ピース/ブレードが横モードを示すか否かを決定する工程と、
ハンド・ピース/ブレードが横モードを示す場合、発生装置の液晶ディスプレイ上にメッセージを表示する工程を含む方法。 - 前記メッセージが「ハンド・ピース/ブレードは横モード振動を含んでいます」というメッセージである請求項13に記載の方法。
- 前記供給工程が駆動信号を最小駆動電流レベルから最大駆動電流レベルまで供給する工程を含む請求項13に記載の方法。
- 前記最小駆動電流レベルが約100maRMSであり、かつ最大駆動電流レベルが約425maRMSである請求項15に記載の方法。
- 前記応答曲線が供給電圧(Power-Delivered)対駆動電流(Drive Current)曲線とハンド・ピース/ブレードインピーダンス(Hand Piece/Blade Impedance)対駆動電流(Drive Current)曲線の少なくとも1つである請求項13に記載の方法。
- 前記外挿が作成された応答曲線を検査して直線および二次関係の少なくとも1つを表す任意の曲線が存在するか否かを決定する工程を含む請求項13に記載の方法。
- 前記電気的特性が出力である請求項13に記載の方法。
- 前記パラメータが電圧及び電流である請求項13に記載の方法。
- 超音波ハンド・ピースにおける横振動を検出するための方法において、
駆動信号を超音波発生装置により超音波ハンド・ピースに供給する工程と、
ハンド・ピース/ブレードが中空に保持されている間、第1の出力レベルにおいてハンド・ピース/ブレードのインピーダンスを測定する工程と、
第1の出力レベルにより第2の出力レベルにおいて予想されるインピーダンスを計算する工程と、
計算された予想されるインピーダンスに基づいてハンド・ピース/ブレードのインピーダンスの増加に対して合格/不合格の閾値を設定する工程と、
第2の出力レベルにおけるハンド・ピース/ブレードのインピーダンスを測定する工程と、
第2の出力レベルにおける測定されたインピーダンスを合格/不合格の閾値と比較する工程と、
ハンド・ピース/ブレードの測定されたインピーダンスが合格/不合格の閾値よりも小さい場合に、発生装置の液晶ディスプレイ上に第1のメッセージを表示する工程と、
測定された実際の出力が合格/不合格の閾値よりも大きい場合に、発生装置の液晶ディスプレイ上に第2のメッセージを表示する工程を含む方法。 - 制御可能な超音波エネルギー発生装置および、該発生装置からのエネルギーにより一定の超音波共鳴振動数で振動するブレード(32)を備えたハンド・ピース(30)を含む超音波外科システムにおいて、前記発生装置は、
一次的共鳴振動数において駆動信号をハンド・ピースに供給する手段(60、78、128)と、
一次的共鳴振動数においてハンド・ピースのインピーダンスを測定する手段(60、80、92)と、
駆動信号の一次的共鳴振動数をシフトする手段(60)と、
シフトされた共鳴振動数においてハンド・ピースのインピーダンスを測定する手段(60、88、92)と、
一次的共鳴振動数において測定されたハンド・ピースのインピーダンスをシフトされた共鳴振動数におけるハンド・ピースのインピーダンスと比較する手段(60)と、
測定されたインピーダンスが所定の閾値よりも大きい場合に、液晶ディスプレイ(12)上にメッセージを表示する手段(60、152)とを備える、超音波外科システム。 - 制御可能な超音波エネルギー発生装置および、該発生装置からのエネルギーにより一定の超音波共鳴振動数で振動するブレード(32)を備えたハンド・ピース(30)を含む超音波外科システムにおいて、前記発生装置は、
ハンド・ピース/ブレードに供給される電圧および電流を有する駆動信号を掃引する手段(60)と、
ハンド・ピース/ブレードに供給されるパラメータをモニターし、記憶する不揮発性メモリと、
ハンド・ピースに供給される電気的特性を記憶されたパラメータに基づいて計算する手段(60)と、
記憶されたパラメータに基づいて応答曲線を作成する手段(60)と、
応答曲線により外挿を実行してハンド・ピース/ブレードが横モードを示すか否かを決定する手段(60)と、
ハンド・ピース/ブレードが横モードを示す場合、液晶ディスプレイ(12)上にメッセージを表示する手段(60、152)とを含む、超音波外科システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US24225100P | 2000-10-20 | 2000-10-20 | |
| US242251 | 2000-10-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003153919A JP2003153919A (ja) | 2003-05-27 |
| JP4156231B2true JP4156231B2 (ja) | 2008-09-24 |
Family
ID=22914046
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001360101AExpired - LifetimeJP4156231B2 (ja) | 2000-10-20 | 2001-10-22 | 超音波ハンド・ピースにおける横振動を検出するための方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4156231B2 (ja) |
Families Citing this family (122)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11229472B2 (en) | 2001-06-12 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with multiple magnetic position sensors |
| JP4041014B2 (ja) | 2003-06-06 | 2008-01-30 | オリンパス株式会社 | 超音波手術装置 |
| US8182501B2 (en) | 2004-02-27 | 2012-05-22 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical shears and method for sealing a blood vessel using same |
| US20060079879A1 (en) | 2004-10-08 | 2006-04-13 | Faller Craig N | Actuation mechanism for use with an ultrasonic surgical instrument |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US7621930B2 (en) | 2006-01-20 | 2009-11-24 | Ethicon Endo-Surgery, Inc. | Ultrasound medical instrument having a medical ultrasonic blade |
| GEP20135840B (en)* | 2006-06-09 | 2013-06-10 | Univ Aberdeen | Method and apparatus for drilling rock |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| US8911460B2 (en) | 2007-03-22 | 2014-12-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8142461B2 (en) | 2007-03-22 | 2012-03-27 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8808319B2 (en) | 2007-07-27 | 2014-08-19 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8523889B2 (en) | 2007-07-27 | 2013-09-03 | Ethicon Endo-Surgery, Inc. | Ultrasonic end effectors with increased active length |
| US8430898B2 (en) | 2007-07-31 | 2013-04-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8512365B2 (en) | 2007-07-31 | 2013-08-20 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US9044261B2 (en) | 2007-07-31 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Temperature controlled ultrasonic surgical instruments |
| EP2217157A2 (en) | 2007-10-05 | 2010-08-18 | Ethicon Endo-Surgery, Inc. | Ergonomic surgical instruments |
| US10010339B2 (en) | 2007-11-30 | 2018-07-03 | Ethicon Llc | Ultrasonic surgical blades |
| US9089360B2 (en) | 2008-08-06 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Devices and techniques for cutting and coagulating tissue |
| US9700339B2 (en) | 2009-05-20 | 2017-07-11 | Ethicon Endo-Surgery, Inc. | Coupling arrangements and methods for attaching tools to ultrasonic surgical instruments |
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US10441345B2 (en) | 2009-10-09 | 2019-10-15 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US9050093B2 (en) | 2009-10-09 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| USRE47996E1 (en) | 2009-10-09 | 2020-05-19 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US8951272B2 (en) | 2010-02-11 | 2015-02-10 | Ethicon Endo-Surgery, Inc. | Seal arrangements for ultrasonically powered surgical instruments |
| US8469981B2 (en) | 2010-02-11 | 2013-06-25 | Ethicon Endo-Surgery, Inc. | Rotatable cutting implement arrangements for ultrasonic surgical instruments |
| US8486096B2 (en) | 2010-02-11 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Dual purpose surgical instrument for cutting and coagulating tissue |
| US8795327B2 (en) | 2010-07-22 | 2014-08-05 | Ethicon Endo-Surgery, Inc. | Electrosurgical instrument with separate closure and cutting members |
| US9192431B2 (en) | 2010-07-23 | 2015-11-24 | Ethicon Endo-Surgery, Inc. | Electrosurgical cutting and sealing instrument |
| US9259265B2 (en) | 2011-07-22 | 2016-02-16 | Ethicon Endo-Surgery, Llc | Surgical instruments for tensioning tissue |
| WO2013119545A1 (en) | 2012-02-10 | 2013-08-15 | Ethicon-Endo Surgery, Inc. | Robotically controlled surgical instrument |
| US9439668B2 (en) | 2012-04-09 | 2016-09-13 | Ethicon Endo-Surgery, Llc | Switch arrangements for ultrasonic surgical instruments |
| US9237921B2 (en)* | 2012-04-09 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Devices and techniques for cutting and coagulating tissue |
| US20140005705A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulating shafts |
| US9326788B2 (en) | 2012-06-29 | 2016-05-03 | Ethicon Endo-Surgery, Llc | Lockout mechanism for use with robotic electrosurgical device |
| US9351754B2 (en) | 2012-06-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| US20140005702A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with distally positioned transducers |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9198714B2 (en) | 2012-06-29 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Haptic feedback devices for surgical robot |
| US9820768B2 (en) | 2012-06-29 | 2017-11-21 | Ethicon Llc | Ultrasonic surgical instruments with control mechanisms |
| US9226767B2 (en) | 2012-06-29 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Closed feedback control for electrosurgical device |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| EP2900158B1 (en) | 2012-09-28 | 2020-04-15 | Ethicon LLC | Multi-function bi-polar forceps |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
| US20140135804A1 (en) | 2012-11-15 | 2014-05-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic and electrosurgical devices |
| US10226273B2 (en) | 2013-03-14 | 2019-03-12 | Ethicon Llc | Mechanical fasteners for use with surgical energy devices |
| US9814514B2 (en) | 2013-09-13 | 2017-11-14 | Ethicon Llc | Electrosurgical (RF) medical instruments for cutting and coagulating tissue |
| US9265926B2 (en) | 2013-11-08 | 2016-02-23 | Ethicon Endo-Surgery, Llc | Electrosurgical devices |
| GB2521229A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| GB2521228A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| US9795436B2 (en) | 2014-01-07 | 2017-10-24 | Ethicon Llc | Harvesting energy from a surgical generator |
| US9554854B2 (en) | 2014-03-18 | 2017-01-31 | Ethicon Endo-Surgery, Llc | Detecting short circuits in electrosurgical medical devices |
| US10463421B2 (en) | 2014-03-27 | 2019-11-05 | Ethicon Llc | Two stage trigger, clamp and cut bipolar vessel sealer |
| US10092310B2 (en) | 2014-03-27 | 2018-10-09 | Ethicon Llc | Electrosurgical devices |
| US9737355B2 (en) | 2014-03-31 | 2017-08-22 | Ethicon Llc | Controlling impedance rise in electrosurgical medical devices |
| US9913680B2 (en) | 2014-04-15 | 2018-03-13 | Ethicon Llc | Software algorithms for electrosurgical instruments |
| US10285724B2 (en) | 2014-07-31 | 2019-05-14 | Ethicon Llc | Actuation mechanisms and load adjustment assemblies for surgical instruments |
| US10639092B2 (en) | 2014-12-08 | 2020-05-05 | Ethicon Llc | Electrode configurations for surgical instruments |
| US10245095B2 (en) | 2015-02-06 | 2019-04-02 | Ethicon Llc | Electrosurgical instrument with rotation and articulation mechanisms |
| US10342602B2 (en) | 2015-03-17 | 2019-07-09 | Ethicon Llc | Managing tissue treatment |
| US10321950B2 (en) | 2015-03-17 | 2019-06-18 | Ethicon Llc | Managing tissue treatment |
| US10595929B2 (en) | 2015-03-24 | 2020-03-24 | Ethicon Llc | Surgical instruments with firing system overload protection mechanisms |
| US10034684B2 (en) | 2015-06-15 | 2018-07-31 | Ethicon Llc | Apparatus and method for dissecting and coagulating tissue |
| US11020140B2 (en) | 2015-06-17 | 2021-06-01 | Cilag Gmbh International | Ultrasonic surgical blade for use with ultrasonic surgical instruments |
| US10357303B2 (en) | 2015-06-30 | 2019-07-23 | Ethicon Llc | Translatable outer tube for sealing using shielded lap chole dissector |
| US11141213B2 (en) | 2015-06-30 | 2021-10-12 | Cilag Gmbh International | Surgical instrument with user adaptable techniques |
| US10034704B2 (en) | 2015-06-30 | 2018-07-31 | Ethicon Llc | Surgical instrument with user adaptable algorithms |
| US10898256B2 (en) | 2015-06-30 | 2021-01-26 | Ethicon Llc | Surgical system with user adaptable techniques based on tissue impedance |
| US11129669B2 (en) | 2015-06-30 | 2021-09-28 | Cilag Gmbh International | Surgical system with user adaptable techniques based on tissue type |
| US11051873B2 (en) | 2015-06-30 | 2021-07-06 | Cilag Gmbh International | Surgical system with user adaptable techniques employing multiple energy modalities based on tissue parameters |
| US10154852B2 (en) | 2015-07-01 | 2018-12-18 | Ethicon Llc | Ultrasonic surgical blade with improved cutting and coagulation features |
| US10194973B2 (en) | 2015-09-30 | 2019-02-05 | Ethicon Llc | Generator for digitally generating electrical signal waveforms for electrosurgical and ultrasonic surgical instruments |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| US10179022B2 (en) | 2015-12-30 | 2019-01-15 | Ethicon Llc | Jaw position impedance limiter for electrosurgical instrument |
| US10575892B2 (en) | 2015-12-31 | 2020-03-03 | Ethicon Llc | Adapter for electrical surgical instruments |
| US11129670B2 (en) | 2016-01-15 | 2021-09-28 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| US11051840B2 (en) | 2016-01-15 | 2021-07-06 | Ethicon Llc | Modular battery powered handheld surgical instrument with reusable asymmetric handle housing |
| US12193698B2 (en) | 2016-01-15 | 2025-01-14 | Cilag Gmbh International | Method for self-diagnosing operation of a control switch in a surgical instrument system |
| US10716615B2 (en) | 2016-01-15 | 2020-07-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with curved end effectors having asymmetric engagement between jaw and blade |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US10555769B2 (en) | 2016-02-22 | 2020-02-11 | Ethicon Llc | Flexible circuits for electrosurgical instrument |
| US10646269B2 (en) | 2016-04-29 | 2020-05-12 | Ethicon Llc | Non-linear jaw gap for electrosurgical instruments |
| US10702329B2 (en) | 2016-04-29 | 2020-07-07 | Ethicon Llc | Jaw structure with distal post for electrosurgical instruments |
| US10485607B2 (en) | 2016-04-29 | 2019-11-26 | Ethicon Llc | Jaw structure with distal closure for electrosurgical instruments |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| US10245064B2 (en) | 2016-07-12 | 2019-04-02 | Ethicon Llc | Ultrasonic surgical instrument with piezoelectric central lumen transducer |
| US10893883B2 (en) | 2016-07-13 | 2021-01-19 | Ethicon Llc | Ultrasonic assembly for use with ultrasonic surgical instruments |
| US10842522B2 (en) | 2016-07-15 | 2020-11-24 | Ethicon Llc | Ultrasonic surgical instruments having offset blades |
| US10376305B2 (en) | 2016-08-05 | 2019-08-13 | Ethicon Llc | Methods and systems for advanced harmonic energy |
| US10285723B2 (en) | 2016-08-09 | 2019-05-14 | Ethicon Llc | Ultrasonic surgical blade with improved heel portion |
| USD847990S1 (en) | 2016-08-16 | 2019-05-07 | Ethicon Llc | Surgical instrument |
| US10736649B2 (en) | 2016-08-25 | 2020-08-11 | Ethicon Llc | Electrical and thermal connections for ultrasonic transducer |
| US10952759B2 (en) | 2016-08-25 | 2021-03-23 | Ethicon Llc | Tissue loading of a surgical instrument |
| US10603064B2 (en) | 2016-11-28 | 2020-03-31 | Ethicon Llc | Ultrasonic transducer |
| US11266430B2 (en) | 2016-11-29 | 2022-03-08 | Cilag Gmbh International | End effector control and calibration |
| US10820920B2 (en) | 2017-07-05 | 2020-11-03 | Ethicon Llc | Reusable ultrasonic medical devices and methods of their use |
| US12076006B2 (en) | 2019-12-30 | 2024-09-03 | Cilag Gmbh International | Surgical instrument comprising an orientation detection system |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US12023086B2 (en) | 2019-12-30 | 2024-07-02 | Cilag Gmbh International | Electrosurgical instrument for delivering blended energy modalities to tissue |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US20210196357A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with asynchronous energizing electrodes |
| US11452525B2 (en) | 2019-12-30 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising an adjustment system |
| US12343063B2 (en) | 2019-12-30 | 2025-07-01 | Cilag Gmbh International | Multi-layer clamp arm pad for enhanced versatility and performance of a surgical device |
| US12114912B2 (en) | 2019-12-30 | 2024-10-15 | Cilag Gmbh International | Non-biased deflectable electrode to minimize contact between ultrasonic blade and electrode |
| US11937866B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Method for an electrosurgical procedure |
| US12064109B2 (en) | 2019-12-30 | 2024-08-20 | Cilag Gmbh International | Surgical instrument comprising a feedback control circuit |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US11684412B2 (en) | 2019-12-30 | 2023-06-27 | Cilag Gmbh International | Surgical instrument with rotatable and articulatable surgical end effector |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US12053224B2 (en) | 2019-12-30 | 2024-08-06 | Cilag Gmbh International | Variation in electrode parameters and deflectable electrode to modify energy density and tissue interaction |
| US12336747B2 (en) | 2019-12-30 | 2025-06-24 | Cilag Gmbh International | Method of operating a combination ultrasonic / bipolar RF surgical device with a combination energy modality end-effector |
| US11986201B2 (en) | 2019-12-30 | 2024-05-21 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11911063B2 (en) | 2019-12-30 | 2024-02-27 | Cilag Gmbh International | Techniques for detecting ultrasonic blade to electrode contact and reducing power to ultrasonic blade |
| US20210196362A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical end effectors with thermally insulative and thermally conductive portions |
| US12262937B2 (en) | 2019-12-30 | 2025-04-01 | Cilag Gmbh International | User interface for surgical instrument with combination energy modality end-effector |
| US11786294B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Control program for modular combination energy device |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US12082808B2 (en) | 2019-12-30 | 2024-09-10 | Cilag Gmbh International | Surgical instrument comprising a control system responsive to software configurations |
- 2001
- 2001-10-22JPJP2001360101Apatent/JP4156231B2/janot_activeExpired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003153919A (ja) | 2003-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4156231B2 (ja) | 超音波ハンド・ピースにおける横振動を検出するための方法 | |
| CA2359400C (en) | Method for detecting transverse vibrations in an ultrasonic hand piece | |
| AU784295B2 (en) | Method for detecting presence of a blade in an ultrasonic system | |
| JP4318890B2 (ja) | 超音波ハンド・ピース/ブレードにおける横モード振動を検出するための方法 | |
| US6633234B2 (en) | Method for detecting blade breakage using rate and/or impedance information | |
| JP4128353B2 (ja) | 負荷をかけた状態およびひび割れ状態の超音波的に同調されているブレードを識別するための方法 | |
| JP4180264B2 (ja) | ゼロ負荷状態における超音波システムの始動性能を改善するための方法 | |
| CA2359152C (en) | Method for driving an ultrasonic system to improve acquisition of blade resonance frequency at startup | |
| AU783220B2 (en) | Method for detecting blade breakage using rate and/or impedance information |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A821 Effective date:20011221 | |
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20041015 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20071009 | |
| RD04 | Notification of resignation of power of attorney | Free format text:JAPANESE INTERMEDIATE CODE: A7424 Effective date:20071122 | |
| A601 | Written request for extension of time | Free format text:JAPANESE INTERMEDIATE CODE: A601 Effective date:20080109 | |
| A602 | Written permission of extension of time | Free format text:JAPANESE INTERMEDIATE CODE: A602 Effective date:20080115 | |
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20080402 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20080610 | |
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20080709 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20110718 Year of fee payment:3 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:4156231 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 Free format text:JAPANESE INTERMEDIATE CODE: R150 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20110718 Year of fee payment:3 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20120718 Year of fee payment:4 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20120718 Year of fee payment:4 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20130718 Year of fee payment:5 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| EXPY | Cancellation because of completion of term |