JP4098338B2 - ウェハ移載装置および基板移載装置 - Google Patents
ウェハ移載装置および基板移載装置Download PDFInfo
- Publication number
- JP4098338B2 JP4098338B2JP2006198771AJP2006198771AJP4098338B2JP 4098338 B2JP4098338 B2JP 4098338B2JP 2006198771 AJP2006198771 AJP 2006198771AJP 2006198771 AJP2006198771 AJP 2006198771AJP 4098338 B2JP4098338 B2JP 4098338B2
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- axis
- link body
- link
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/418—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM]
- G05B19/41815—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the cooperation between machine tools, manipulators and conveyor or other workpiece supply system, workcell
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45031—Manufacturing semiconductor wafers
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/137—Associated with semiconductor wafer handling including means for charging or discharging wafer cassette
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/139—Associated with semiconductor wafer handling including wafer charging or discharging means for vacuum chamber
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Robotics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Quality & Reliability (AREA)
- Automation & Control Theory (AREA)
- General Engineering & Computer Science (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Description
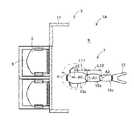
5に収容された状態で、半導体処理設備1に搬送される。ウェハ移載装置3は、準備空間形成部11と、フープオープナ6と、ウェハ搬送ロボット7とを有する。準備空間形成部11は、準備空間9を規定する。準備空間9は、準備空間形成部11に固定されるファンフィルタユニット等の集塵装置によってクリーンな空間に保たれる。フープオープナ6は、フープ5および準備空間形成部11に形成されるそれぞれのドアを開閉する。フープオープナ6は、各ドアを開閉することで、フープ5の内部空間と準備空間9とが連通した状態と、閉鎖した状態とを切換え可能である。ウェハ搬送ロボット7は、準備空間9に収容され、フープ5とウェハ処理装置2とにわたってウェハ4を搬送する。
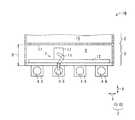
(b)予め定める前後方向に間隔をあけて配置される正面壁と背面壁とを有し、予め調整される雰囲気気体で満たされ、前後方向に比べて前後方向に垂直な左右方向が長い横長の準備空間を規定し、正面壁に複数の正面側開口が形成されるとともに各正面側開口毎に前記基板容器が設けられ、背面壁に前記準備空間とこの準備空間に隣接する処理空間とを連通する背面側開口が形成される準備空間形成部と、
(c)準備空間に隣接して配置される基板容器を開閉するとともに、準備空間形成部の正面側開口を開閉するための複数のフープオープナまたは基板容器設置台と、
(d)準備空間に配置され、各正面側開口と背面側開口とにわたって半導体ウェハを搬送するウェハ搬送ロボットとを含み、
(e)ウェハ搬送ロボットは、
(e1)準備空間形成部に固定され、前後方向に関して背面壁寄りに旋回軸線が設定される基台と、
(e2)基端部から先端部に向かう方向に順次連結される第1〜第3リンク体を備え、第1リンク体の基端部が基台に連結され、第3リンク体の先端部に基板を把持するためのロボットハンドが設けられて、旋回軸線まわりに角変位可能に構成され、前記ロボットハンドによって正面壁に設けられる最も離れた基板容器内の半導体ウェハを把持し、かつ準備空間内で旋回軸線まわりに旋回して前記背面側開口から処理空間内へ搬送するロボットアームと、
(e3)ロボットアームの各リンク体を対応する軸線まわりにそれぞれ個別に角変位駆動する駆動手段とを含んで構成され、
(e4)ロボットアームが変形されて、旋回軸線から、旋回軸線に対して半径方向に最も離れたアーム部分までの距離が最小となる最小変形状態において、旋回軸線から旋回軸線に対して半径方向に最も離れたアーム部分またはロボットハンドに把持された半導体ウェハのウェハ部分までの距離である最小回転半径Rが、準備空間形成部の正面壁と背面壁との間の準備空間の前後方向寸法Bの1/2を超え、かつ準備空間の前後方向寸法Bから、前後方向距離L0と、フープオープナによって設定される正面壁から背面壁側への前後方向のロボット侵入禁止領域寸法Eとを減算した減算値(B−L0−E)以下(B/2<R≦B−L0−E)に設定されることを特徴とするウェハ移載装置である。
基台に一端部が連結されて、前記旋回軸線まわりに角変位可能に構成され、前記旋回軸線に平行な第1関節軸線が設定される第1リンク体と、
第1リンク体の他端部に、一端部が連結されて、前記第1関節軸線まわりに角変位可能に構成され、前記旋回軸線に平行な第2関節軸線が設定される第2リンク体と、
第2リンク体の他端部に、一端部が連結されて、前記第2関節軸線まわりに角変位可能に構成され、他端部に前記ロボットハンドが設けられる1または複数の第3リンク体とを有し、
旋回軸線から、旋回軸線に対して第1関節軸線に向かう半径方向に最も離れた第1リンク体の端部までの距離である第1リンク距離L1が、前記許容方向寸法(B−L0−E)の1/2を超え、かつ前記許容寸法(B−L0−E)以下((B−L0−E)/2<L1≦B−L0−E)に設定されることを特徴とする。
第2関節軸線から、第2関節軸線に対して第1関節軸線に向かう方向に最も離れた第2リンク体の端部までの距離である第2リンク距離L2が、前記許容方向寸法(B−L0−E)の1/2を超えて、前記許容寸法(B−L0−E)以下に設定されることを特徴とする。
(b)前記準備空間を規定し、予め定める前後方向に間隔をあけて配置される正面壁と背面壁とを有し、正面壁に複数の第1出入口が形成され、背面壁に前記準備空間とこの準備空間に隣接する処理空間とを連通する第2出入口が形成される準備空間形成部と、
(c)準備空間形成部の各第1出入口を開閉する開閉手段と、
(d)準備空間に配置され、各第1出入口と第2出入口とにわたって基板を搬送する基板搬送ロボットとを含み、
(e)基板搬送ロボットは、
(e1)準備空間形成部に固定される基台と、
(e2)基台に一端部が連結されて、前記旋回軸線まわりに角変位可能に構成され、前記旋回軸線に平行な第1関節軸線が設定される第1リンク体と、
(e3)第1リンク体の他端部に、一端部が連結されて、前記第1関節軸線まわりに角変位可能に構成され、前記旋回軸線に平行な第2関節軸線が設定される第2リンク体と、
(e4)第2リンク体の他端部に、一端部が連結されて、前記第2関節軸線まわりに角変位可能に構成され、他端部に前記ロボットハンドが設けられる1または複数の第3リンク体と、
(e5)前記ロボットハンドによって正面壁に設けられる最も離れた基板容器内の半導体ウエハを把持し、かつ準備空間内で旋回軸線まわりに旋回して、前記第2出入口から処理空間内へ搬送するロボットアームと、
(e6)各リンク体を対応する関節軸まわりにそれぞれ個別に角変位駆動する駆動手段とを含んで構成され、
(e7)旋回軸線から、旋回軸線に対して第1関節軸線に向かう半径方向に最も離れた第1リンク体の端部までの距離である第1リンク距離L1が、準備空間形成部の正面壁と背面壁との間の準備空間の前後方向寸法Bの1/2を超え、かつ準備空間の前後方向寸法Bから、第1リンク体の旋回軸線まわりの周面の半径方向寸法T2およびロボットの干渉を防ぐための予め定める隙間寸法Qの和である前後方向寸法L0(=T2+Q)と、開閉手段によって設定される正面壁から背面壁側へ前後方向のロボット侵入禁止領域寸法Eとを減算した値(B−L0−E)以下(B/2<L1≦B−L0−E)に設定されることを特徴とする基板移載装置である。
Unified Pod、略称フープ)と称される基板容器に複数収容された状態で、半導体処理設備20に搬送される。フープ25は、極所クリーン化技術に関し、クリーン環境におけるミニエンバイロメント用基板容器である。
Materials International)規格によって、予め規定される。この場合、たとえばフープ25およびフープ25を開閉するためのフープオープナ(FOUP Opener)26は、SEMI規格のE47.1、E15.1、E57、E62、E63、E84などの仕様に従う。ただし、半導体処理設備20の構成がSEMI規格外の構成であっても、本実施の形態に含まれる。
Equipment Front End Module、略称EFEM)である。ウェハ移載装置23は、半導体処理設備23のうちで、フープ25とウェハ処理装置22との間でのウェハ24の受渡しを担うインターフェース部となる。ウェハ24は、フープ内空間34と、ウェハ処理装置22の処理空間30との間を移動する間に、予め定められる雰囲気気体で満たされるクリーン度の高い準備空間29を通過する。
International Organization for Standardization)に規定されるCLASS1が採用される。
Assembly Robot Arm、SCARA)型の水平多関節ロボットによって実現される。ロボット27は、準備空間29に配置され、ロボットアーム41と、水平駆動手段42aと、上下駆動手段42bと、基台43と、コントローラ44とを含んで構成される。
Read Only memory)などによって実現され、演算回路は、CPU(Central Processing
Unit)によって実現される。
(2・L11)2≧(L11+C)2+(1.5・W−H・Sinθ)2
…(1)
22 ウェハ処理装置
23 ウェハ移載装置
24 半導体ウェハ
25 フープ
26 フープオープナ
27 基板搬送ロボット
28 準備空間形成部
41 ロボットアーム
41a 第1リンク体
42b 第2リンク体
41c 第3リンク体
43 基台
110 正面壁
111 背面壁
120 正面側開口
121 背面側開口
R 最小回転半径
A0 旋回軸線
A1 第1関節軸線
A2 第2関節軸線
Claims (7)
- (a)複数の基板容器に収容される半導体ウェハを、半導体処理を行うウェハ処理装置に対して、搬入および搬出を行うウェハ移載装置であって、
(b)予め定める前後方向に間隔をあけて配置される正面壁と背面壁とを有し、予め調整される雰囲気気体で満たされ、前後方向に比べて前後方向に垂直な左右方向が長い横長の準備空間を規定し、正面壁に複数の正面側開口が形成されるとともに各正面側開口毎に前記基板容器が設けられ、背面壁に前記準備空間とこの準備空間に隣接する処理空間とを連通する背面側開口が形成される準備空間形成部と、
(c)準備空間に隣接して配置される基板容器を開閉するとともに、準備空間形成部の正面側開口を開閉するための複数のフープオープナまたは基板容器設置台と、
(d)準備空間に配置され、各正面側開口と背面側開口とにわたって半導体ウェハを搬送するウェハ搬送ロボットとを含み、
(e)ウェハ搬送ロボットは、
(e1)準備空間形成部に固定され、前後方向に関して背面壁寄りに旋回軸線が設定される基台と、
(e2)基端部から先端部に向かう方向に順次連結される第1〜第3リンク体を備え、第1リンク体の基端部が基台に連結され、第3リンク体の先端部に基板を把持するためのロボットハンドが設けられて、旋回軸線まわりに角変位可能に構成され、前記ロボットハンドによって正面壁に設けられる最も離れた基板容器内の半導体ウェハを把持し、かつ準備空間内で旋回軸線まわりに旋回して前記背面側開口から処理空間内へ搬送するロボットアームと、
(e3)ロボットアームの各リンク体を対応する軸線まわりにそれぞれ個別に角変位駆動する駆動手段とを含んで構成され、
(e4)ロボットアームが変形されて、旋回軸線から、旋回軸線に対して半径方向に最も離れたアーム部分までの距離が最小となる最小変形状態において、旋回軸線から旋回軸線に対して半径方向に最も離れたアーム部分またはロボットハンドに把持された半導体ウェハのウェハ部分までの距離である最小回転半径Rが、準備空間形成部の正面壁と背面壁との間の準備空間の前後方向寸法Bの1/2を超え、かつ準備空間の前後方向寸法Bから、前後方向距離L0と、フープオープナによって設定される正面壁から背面壁側への前後方向のロボット侵入禁止領域寸法Eとを減算した減算値(B−L0−E)以下(B/2<R≦B−L0−E)に設定されることを特徴とするウェハ移載装置。 - 前記第1リンク体は、基台に一端部が連結されて、前記旋回軸線まわりに角変位可能に構成され、前記旋回軸線に平行な第1関節軸線が設定され、
前記第2リンク体は、第1リンク体の他端部に、一端部が連結されて、前記第1関節軸線まわりに角変位可能に構成され、前記旋回軸線に平行な第2関節軸線が設定され、
前記第3リンク体は、第2リンク体の他端部に、一端部が連結されて、前記第2関節軸線まわりに角変位可能に設けられる1または複数のリンク体から成り、
旋回軸線から、旋回軸線に対して第1関節軸線に向かう半径方向に最も離れた第1リンク体の端部までの距離である第1リンク距離L1が、前記許容方向寸法(B−L0−E)の1/2を超え、かつ前記許容寸法(B−L0−E)以下((B−L0−E)/2<L1≦B−L0−E)に設定されることを特徴とする請求項1記載のウェハ移載装置。 - 旋回軸線から第1関節軸線までの第1軸間距離L11と、第1関節軸線から第2関節軸線までの第2軸間距離L12とが同一に設定され、
第2関節軸線から、第2関節軸線に対して第1関節軸線に向かう方向に最も離れた第2リンク体の端部までの距離である第2リンク距離L2が、前記許容方向寸法(B−L0−E)の1/2を超えて、前記許容寸法(B−L0−E)以下に設定されることを特徴とする請求項2記載のウェハ移載装置。 - 半導体ウェハをロボットハンドが把持した状態で、第2関節軸線から、第2関節軸線に対して半径方向に最も離れた第3リンク体の端部または半導体ウェハ部分までの距離である第3リンク距離L3が、前記許容方向寸法(B−L0−E)の1/2を超えて、前記許容寸法(B−L0−E)以下に設定されることを特徴とする請求項3記載のウェハ移載装置。
- 前記第1リンク距離L1、第2リンク距離L2および第3リンク距離L3が、前記許容寸法(B−L0−E)と同一に設定されることを特徴とする請求項4記載のウェハ移載装置。
- 準備空間形成部には、前後方向と旋回軸線方向とに直交する左右方向に関して並ぶ4つの正面側開口が形成され、各正面側開口毎に前記フープオープナが設けられることを特徴とする請求項1〜5のいずれか1つに記載のウェハ移載装置。
- (a)基板処理を行う基板処理装置に対して、予め調整される雰囲気気体で満たされ、前後方向に比べて前後方向に垂直な左右方向が長い横長の準備空間で基板の搬入および搬出を行う基板移載装置であって、
(b)前記準備空間を規定し、予め定める前後方向に間隔をあけて配置される正面壁と背面壁とを有し、正面壁に複数の第1出入口が形成され、背面壁に前記準備空間とこの準備空間に隣接する処理空間とを連通する第2出入口が形成される準備空間形成部と、
(c)準備空間形成部の各第1出入口を開閉する開閉手段と、
(d)準備空間に配置され、各第1出入口と第2出入口とにわたって基板を搬送する基板搬送ロボットとを含み、
(e)基板搬送ロボットは、
(e1)準備空間形成部に固定される基台と、
(e2)基台に一端部が連結されて、前記旋回軸線まわりに角変位可能に構成され、前記旋回軸線に平行な第1関節軸線が設定される第1リンク体と、
(e3)第1リンク体の他端部に、一端部が連結されて、前記第1関節軸線まわりに角変位可能に構成され、前記旋回軸線に平行な第2関節軸線が設定される第2リンク体と、
(e4)第2リンク体の他端部に、一端部が連結されて、前記第2関節軸線まわりに角変位可能に構成され、他端部に前記ロボットハンドが設けられる1または複数の第3リンク体と、
(e5)前記ロボットハンドによって正面壁に設けられる最も離れた基板容器内の半導体ウエハを把持し、かつ準備空間内で旋回軸線まわりに旋回して、前記第2出入口から処理空間内へ搬送するロボットアームと、
(e6)各リンク体を対応する関節軸まわりにそれぞれ個別に角変位駆動する駆動手段とを含んで構成され、
(e7)旋回軸線から、旋回軸線に対して第1関節軸線に向かう半径方向に最も離れた第1リンク体の端部までの距離である第1リンク距離L1が、準備空間形成部の正面壁と背面壁との間の準備空間の前後方向寸法Bの1/2を超え、かつ準備空間の前後方向寸法Bから、第1リンク体の旋回軸線まわりの周面の半径方向寸法T2およびロボットの干渉を防ぐための予め定める隙間寸法Qの和である前後方向寸法L0(=T2+Q)と、開閉手段によって設定される正面壁から背面壁側へ前後方向のロボット侵入禁止領域寸法Eとを減算した値(B−L0−E)以下(B/2<L1≦B−L0−E)に設定されることを特徴とする基板移載装置。
Priority Applications (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006198771AJP4098338B2 (ja) | 2006-07-20 | 2006-07-20 | ウェハ移載装置および基板移載装置 |
| US11/879,509US7874782B2 (en) | 2006-07-20 | 2007-07-18 | Wafer transfer apparatus and substrate transfer apparatus |
| KR1020070072303AKR100909727B1 (ko) | 2006-07-20 | 2007-07-19 | 웨이퍼 이재 장치 및 기판 이재 장치 |
| EP07112793.0AEP1881526B1 (en) | 2006-07-20 | 2007-07-19 | Wafer transfer apparatus and substrate transfer apparatus |
| US13/750,625USRE45772E1 (en) | 2006-07-20 | 2013-01-25 | Wafer transfer apparatus and substrate transfer apparatus |
| US14/852,993USRE46465E1 (en) | 2006-07-20 | 2015-09-14 | Wafer transfer apparatus and substrate transfer apparatus |
| US15/599,227USRE47145E1 (en) | 2006-07-20 | 2017-05-18 | Wafer transfer apparatus and substrate transfer apparatus |
| US15/976,405USRE47909E1 (en) | 2006-07-20 | 2018-05-10 | Wafer transfer apparatus and substrate transfer apparatus |
| US16/178,125USRE48031E1 (en) | 2006-07-20 | 2018-11-01 | Wafer transfer apparatus and substrate transfer apparatus |
| US16/869,962USRE48792E1 (en) | 2006-07-20 | 2020-05-08 | Wafer transfer apparatus and substrate transfer apparatus |
| US17/492,300USRE49671E1 (en) | 2006-07-20 | 2021-10-01 | Wafer transfer apparatus and substrate transfer apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006198771AJP4098338B2 (ja) | 2006-07-20 | 2006-07-20 | ウェハ移載装置および基板移載装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007319013ADivisionJP4746027B2 (ja) | 2007-12-10 | 2007-12-10 | 基板搬送方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008028134A JP2008028134A (ja) | 2008-02-07 |
| JP4098338B2true JP4098338B2 (ja) | 2008-06-11 |
Family
ID=38515493
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006198771AActiveJP4098338B2 (ja) | 2006-07-20 | 2006-07-20 | ウェハ移載装置および基板移載装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (8) | US7874782B2 (ja) |
| EP (1) | EP1881526B1 (ja) |
| JP (1) | JP4098338B2 (ja) |
| KR (1) | KR100909727B1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9252035B2 (en) | 2012-11-09 | 2016-02-02 | Kabushiki Kaisha Yaskawa Denki | Substrate transfer system, substrate processing system, and substrate transfer robot |
| US10724942B2 (en) | 2017-02-10 | 2020-07-28 | Kabushiki Kaisha Toshiba | Inspection apparatus and inspection method |
| JP2023019386A (ja)* | 2021-07-29 | 2023-02-09 | シンフォニアテクノロジー株式会社 | 基板搬送装置 |
Families Citing this family (347)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7604449B1 (en)* | 2005-06-27 | 2009-10-20 | Kla-Tencor Technologies Corporation | Equipment front end module |
| JP4098338B2 (ja)* | 2006-07-20 | 2008-06-11 | 川崎重工業株式会社 | ウェハ移載装置および基板移載装置 |
| TWI398335B (zh)* | 2006-11-27 | 2013-06-11 | Nidec Sankyo Corp | Workpiece conveying system |
| JP5387412B2 (ja)* | 2007-11-21 | 2014-01-15 | 株式会社安川電機 | 搬送ロボット、筐体、半導体製造装置およびソータ装置 |
| US8186927B2 (en)* | 2008-05-27 | 2012-05-29 | Tdk Corporation | Contained object transfer system |
| JP5504641B2 (ja)* | 2009-02-13 | 2014-05-28 | 株式会社安川電機 | 基板搬送用ロボット及びそれを備えた基板搬送装置、半導体製造装置 |
| JP5246550B2 (ja)* | 2009-03-03 | 2013-07-24 | 川崎重工業株式会社 | ロボット及びその制御方法 |
| US9394608B2 (en) | 2009-04-06 | 2016-07-19 | Asm America, Inc. | Semiconductor processing reactor and components thereof |
| US8802201B2 (en) | 2009-08-14 | 2014-08-12 | Asm America, Inc. | Systems and methods for thin-film deposition of metal oxides using excited nitrogen-oxygen species |
| JP5316521B2 (ja)* | 2010-03-31 | 2013-10-16 | 株式会社安川電機 | 基板搬送システム、基板処理システムおよび基板搬送ロボット |
| JP5755842B2 (ja)* | 2010-04-22 | 2015-07-29 | 株式会社ダイヘン | ワーク搬送システム |
| US20130145893A1 (en)* | 2010-09-03 | 2013-06-13 | Mitsubishi Electric Corporation | Ceiling-mounted scara robot |
| US9443749B2 (en)* | 2011-01-20 | 2016-09-13 | Tokyo Electron Limited | Vacuum processing apparatus |
| US20130023129A1 (en) | 2011-07-20 | 2013-01-24 | Asm America, Inc. | Pressure transmitter for a semiconductor processing environment |
| KR20180128987A (ko)* | 2011-09-16 | 2018-12-04 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이동 장치 |
| JP5364769B2 (ja) | 2011-09-26 | 2013-12-11 | 株式会社安川電機 | 搬送ロボットおよび基板処理装置 |
| US9017481B1 (en) | 2011-10-28 | 2015-04-28 | Asm America, Inc. | Process feed management for semiconductor substrate processing |
| JP2012035408A (ja)* | 2011-11-09 | 2012-02-23 | Kawasaki Heavy Ind Ltd | 基板搬送ロボット |
| JP5614417B2 (ja) | 2012-01-05 | 2014-10-29 | 株式会社安川電機 | 搬送システム |
| JP5621796B2 (ja) | 2012-01-31 | 2014-11-12 | 株式会社安川電機 | 搬送システム |
| JP5541299B2 (ja)* | 2012-01-31 | 2014-07-09 | 株式会社安川電機 | 搬送システム |
| JP5569544B2 (ja) | 2012-01-31 | 2014-08-13 | 株式会社安川電機 | 搬送ロボット |
| JP2013165241A (ja)* | 2012-02-13 | 2013-08-22 | Yaskawa Electric Corp | 搬送装置 |
| JP5885528B2 (ja)* | 2012-02-14 | 2016-03-15 | 株式会社安川電機 | 搬送装置 |
| JP6110636B2 (ja)* | 2012-08-09 | 2017-04-05 | 日本電産サンキョー株式会社 | 産業用ロボット |
| US10714315B2 (en) | 2012-10-12 | 2020-07-14 | Asm Ip Holdings B.V. | Semiconductor reaction chamber showerhead |
| US20160376700A1 (en) | 2013-02-01 | 2016-12-29 | Asm Ip Holding B.V. | System for treatment of deposition reactor |
| JP5853991B2 (ja) | 2013-05-22 | 2016-02-09 | 株式会社安川電機 | 基板搬送ロボット、基板搬送システムおよび基板搬送方法 |
| JP5861677B2 (ja) | 2013-07-08 | 2016-02-16 | 株式会社安川電機 | 吸着構造、ロボットハンドおよびロボット |
| JP5861676B2 (ja) | 2013-07-08 | 2016-02-16 | 株式会社安川電機 | 吸着構造、ロボットハンドおよびロボット |
| US10424498B2 (en)* | 2013-09-09 | 2019-09-24 | Persimmon Technologies Corporation | Substrate transport vacuum platform |
| US11015245B2 (en) | 2014-03-19 | 2021-05-25 | Asm Ip Holding B.V. | Gas-phase reactor and system having exhaust plenum and components thereof |
| US10858737B2 (en) | 2014-07-28 | 2020-12-08 | Asm Ip Holding B.V. | Showerhead assembly and components thereof |
| US9890456B2 (en) | 2014-08-21 | 2018-02-13 | Asm Ip Holding B.V. | Method and system for in situ formation of gas-phase compounds |
| US10941490B2 (en) | 2014-10-07 | 2021-03-09 | Asm Ip Holding B.V. | Multiple temperature range susceptor, assembly, reactor and system including the susceptor, and methods of using the same |
| JP6374295B2 (ja)* | 2014-10-30 | 2018-08-15 | 日本電産サンキョー株式会社 | 産業用ロボット |
| US10276355B2 (en) | 2015-03-12 | 2019-04-30 | Asm Ip Holding B.V. | Multi-zone reactor, system including the reactor, and method of using the same |
| US10458018B2 (en) | 2015-06-26 | 2019-10-29 | Asm Ip Holding B.V. | Structures including metal carbide material, devices including the structures, and methods of forming same |
| US9929034B2 (en) | 2015-09-03 | 2018-03-27 | Kawasaki Jukogyo Kabushiki Kaisha | Substrate transfer device |
| US10211308B2 (en) | 2015-10-21 | 2019-02-19 | Asm Ip Holding B.V. | NbMC layers |
| US11139308B2 (en) | 2015-12-29 | 2021-10-05 | Asm Ip Holding B.V. | Atomic layer deposition of III-V compounds to form V-NAND devices |
| US10529554B2 (en) | 2016-02-19 | 2020-01-07 | Asm Ip Holding B.V. | Method for forming silicon nitride film selectively on sidewalls or flat surfaces of trenches |
| US10343920B2 (en) | 2016-03-18 | 2019-07-09 | Asm Ip Holding B.V. | Aligned carbon nanotubes |
| US10865475B2 (en) | 2016-04-21 | 2020-12-15 | Asm Ip Holding B.V. | Deposition of metal borides and silicides |
| US10190213B2 (en) | 2016-04-21 | 2019-01-29 | Asm Ip Holding B.V. | Deposition of metal borides |
| US10367080B2 (en) | 2016-05-02 | 2019-07-30 | Asm Ip Holding B.V. | Method of forming a germanium oxynitride film |
| US11453943B2 (en) | 2016-05-25 | 2022-09-27 | Asm Ip Holding B.V. | Method for forming carbon-containing silicon/metal oxide or nitride film by ALD using silicon precursor and hydrocarbon precursor |
| JP2018000126A (ja)* | 2016-07-05 | 2018-01-11 | シンフォニアテクノロジー株式会社 | 細胞搬送装置 |
| US10612137B2 (en) | 2016-07-08 | 2020-04-07 | Asm Ip Holdings B.V. | Organic reactants for atomic layer deposition |
| US9859151B1 (en) | 2016-07-08 | 2018-01-02 | Asm Ip Holding B.V. | Selective film deposition method to form air gaps |
| US10714385B2 (en) | 2016-07-19 | 2020-07-14 | Asm Ip Holding B.V. | Selective deposition of tungsten |
| US9812320B1 (en) | 2016-07-28 | 2017-11-07 | Asm Ip Holding B.V. | Method and apparatus for filling a gap |
| US9887082B1 (en) | 2016-07-28 | 2018-02-06 | Asm Ip Holding B.V. | Method and apparatus for filling a gap |
| KR102532607B1 (ko) | 2016-07-28 | 2023-05-15 | 에이에스엠 아이피 홀딩 비.브이. | 기판 가공 장치 및 그 동작 방법 |
| JP6774276B2 (ja) | 2016-09-13 | 2020-10-21 | 川崎重工業株式会社 | 基板移載装置 |
| US10643826B2 (en) | 2016-10-26 | 2020-05-05 | Asm Ip Holdings B.V. | Methods for thermally calibrating reaction chambers |
| US11532757B2 (en) | 2016-10-27 | 2022-12-20 | Asm Ip Holding B.V. | Deposition of charge trapping layers |
| US10229833B2 (en) | 2016-11-01 | 2019-03-12 | Asm Ip Holding B.V. | Methods for forming a transition metal nitride film on a substrate by atomic layer deposition and related semiconductor device structures |
| US10714350B2 (en) | 2016-11-01 | 2020-07-14 | ASM IP Holdings, B.V. | Methods for forming a transition metal niobium nitride film on a substrate by atomic layer deposition and related semiconductor device structures |
| US10262884B2 (en)* | 2016-11-10 | 2019-04-16 | Applied Materials, Inc. | Systems, apparatus, and methods for an improved load port |
| KR102546317B1 (ko) | 2016-11-15 | 2023-06-21 | 에이에스엠 아이피 홀딩 비.브이. | 기체 공급 유닛 및 이를 포함하는 기판 처리 장치 |
| KR102762543B1 (ko) | 2016-12-14 | 2025-02-05 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| US11447861B2 (en) | 2016-12-15 | 2022-09-20 | Asm Ip Holding B.V. | Sequential infiltration synthesis apparatus and a method of forming a patterned structure |
| US11581186B2 (en) | 2016-12-15 | 2023-02-14 | Asm Ip Holding B.V. | Sequential infiltration synthesis apparatus |
| KR102700194B1 (ko) | 2016-12-19 | 2024-08-28 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| US10269558B2 (en) | 2016-12-22 | 2019-04-23 | Asm Ip Holding B.V. | Method of forming a structure on a substrate |
| US10867788B2 (en) | 2016-12-28 | 2020-12-15 | Asm Ip Holding B.V. | Method of forming a structure on a substrate |
| US11390950B2 (en) | 2017-01-10 | 2022-07-19 | Asm Ip Holding B.V. | Reactor system and method to reduce residue buildup during a film deposition process |
| US20180308728A1 (en)* | 2017-02-07 | 2018-10-25 | Brooks Automation, Inc. | Method and apparatus for substrate transport |
| US10468261B2 (en) | 2017-02-15 | 2019-11-05 | Asm Ip Holding B.V. | Methods for forming a metallic film on a substrate by cyclical deposition and related semiconductor device structures |
| BR112019018103A2 (pt)* | 2017-03-01 | 2020-03-24 | Kao Corporation | Promotor para crescimento de planta leguminosa |
| US10529563B2 (en) | 2017-03-29 | 2020-01-07 | Asm Ip Holdings B.V. | Method for forming doped metal oxide films on a substrate by cyclical deposition and related semiconductor device structures |
| KR102457289B1 (ko) | 2017-04-25 | 2022-10-21 | 에이에스엠 아이피 홀딩 비.브이. | 박막 증착 방법 및 반도체 장치의 제조 방법 |
| US10892156B2 (en) | 2017-05-08 | 2021-01-12 | Asm Ip Holding B.V. | Methods for forming a silicon nitride film on a substrate and related semiconductor device structures |
| US10770286B2 (en) | 2017-05-08 | 2020-09-08 | Asm Ip Holdings B.V. | Methods for selectively forming a silicon nitride film on a substrate and related semiconductor device structures |
| US10886123B2 (en) | 2017-06-02 | 2021-01-05 | Asm Ip Holding B.V. | Methods for forming low temperature semiconductor layers and related semiconductor device structures |
| US12040200B2 (en) | 2017-06-20 | 2024-07-16 | Asm Ip Holding B.V. | Semiconductor processing apparatus and methods for calibrating a semiconductor processing apparatus |
| US11306395B2 (en) | 2017-06-28 | 2022-04-19 | Asm Ip Holding B.V. | Methods for depositing a transition metal nitride film on a substrate by atomic layer deposition and related deposition apparatus |
| US10685834B2 (en) | 2017-07-05 | 2020-06-16 | Asm Ip Holdings B.V. | Methods for forming a silicon germanium tin layer and related semiconductor device structures |
| KR20190009245A (ko) | 2017-07-18 | 2019-01-28 | 에이에스엠 아이피 홀딩 비.브이. | 반도체 소자 구조물 형성 방법 및 관련된 반도체 소자 구조물 |
| US11374112B2 (en) | 2017-07-19 | 2022-06-28 | Asm Ip Holding B.V. | Method for depositing a group IV semiconductor and related semiconductor device structures |
| US10541333B2 (en) | 2017-07-19 | 2020-01-21 | Asm Ip Holding B.V. | Method for depositing a group IV semiconductor and related semiconductor device structures |
| US11018002B2 (en) | 2017-07-19 | 2021-05-25 | Asm Ip Holding B.V. | Method for selectively depositing a Group IV semiconductor and related semiconductor device structures |
| US10590535B2 (en) | 2017-07-26 | 2020-03-17 | Asm Ip Holdings B.V. | Chemical treatment, deposition and/or infiltration apparatus and method for using the same |
| TWI815813B (zh) | 2017-08-04 | 2023-09-21 | 荷蘭商Asm智慧財產控股公司 | 用於分配反應腔內氣體的噴頭總成 |
| US10770336B2 (en) | 2017-08-08 | 2020-09-08 | Asm Ip Holding B.V. | Substrate lift mechanism and reactor including same |
| US10692741B2 (en) | 2017-08-08 | 2020-06-23 | Asm Ip Holdings B.V. | Radiation shield |
| US11139191B2 (en) | 2017-08-09 | 2021-10-05 | Asm Ip Holding B.V. | Storage apparatus for storing cassettes for substrates and processing apparatus equipped therewith |
| US11769682B2 (en) | 2017-08-09 | 2023-09-26 | Asm Ip Holding B.V. | Storage apparatus for storing cassettes for substrates and processing apparatus equipped therewith |
| US11830730B2 (en) | 2017-08-29 | 2023-11-28 | Asm Ip Holding B.V. | Layer forming method and apparatus |
| US11056344B2 (en) | 2017-08-30 | 2021-07-06 | Asm Ip Holding B.V. | Layer forming method |
| KR102491945B1 (ko) | 2017-08-30 | 2023-01-26 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| US11295980B2 (en) | 2017-08-30 | 2022-04-05 | Asm Ip Holding B.V. | Methods for depositing a molybdenum metal film over a dielectric surface of a substrate by a cyclical deposition process and related semiconductor device structures |
| KR102401446B1 (ko) | 2017-08-31 | 2022-05-24 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| KR102630301B1 (ko) | 2017-09-21 | 2024-01-29 | 에이에스엠 아이피 홀딩 비.브이. | 침투성 재료의 순차 침투 합성 방법 처리 및 이를 이용하여 형성된 구조물 및 장치 |
| US10844484B2 (en) | 2017-09-22 | 2020-11-24 | Asm Ip Holding B.V. | Apparatus for dispensing a vapor phase reactant to a reaction chamber and related methods |
| US10658205B2 (en) | 2017-09-28 | 2020-05-19 | Asm Ip Holdings B.V. | Chemical dispensing apparatus and methods for dispensing a chemical to a reaction chamber |
| US10403504B2 (en) | 2017-10-05 | 2019-09-03 | Asm Ip Holding B.V. | Method for selectively depositing a metallic film on a substrate |
| US10319588B2 (en) | 2017-10-10 | 2019-06-11 | Asm Ip Holding B.V. | Method for depositing a metal chalcogenide on a substrate by cyclical deposition |
| US10923344B2 (en) | 2017-10-30 | 2021-02-16 | Asm Ip Holding B.V. | Methods for forming a semiconductor structure and related semiconductor structures |
| US10910262B2 (en) | 2017-11-16 | 2021-02-02 | Asm Ip Holding B.V. | Method of selectively depositing a capping layer structure on a semiconductor device structure |
| US10155309B1 (en)* | 2017-11-16 | 2018-12-18 | Lam Research Corporation | Wafer handling robots with rotational joint encoders |
| US11022879B2 (en) | 2017-11-24 | 2021-06-01 | Asm Ip Holding B.V. | Method of forming an enhanced unexposed photoresist layer |
| CN111344522B (zh) | 2017-11-27 | 2022-04-12 | 阿斯莫Ip控股公司 | 包括洁净迷你环境的装置 |
| WO2019103613A1 (en) | 2017-11-27 | 2019-05-31 | Asm Ip Holding B.V. | A storage device for storing wafer cassettes for use with a batch furnace |
| US10872771B2 (en) | 2018-01-16 | 2020-12-22 | Asm Ip Holding B. V. | Method for depositing a material film on a substrate within a reaction chamber by a cyclical deposition process and related device structures |
| TWI799494B (zh) | 2018-01-19 | 2023-04-21 | 荷蘭商Asm 智慧財產控股公司 | 沈積方法 |
| KR102695659B1 (ko) | 2018-01-19 | 2024-08-14 | 에이에스엠 아이피 홀딩 비.브이. | 플라즈마 보조 증착에 의해 갭 충진 층을 증착하는 방법 |
| US11018047B2 (en) | 2018-01-25 | 2021-05-25 | Asm Ip Holding B.V. | Hybrid lift pin |
| USD880437S1 (en) | 2018-02-01 | 2020-04-07 | Asm Ip Holding B.V. | Gas supply plate for semiconductor manufacturing apparatus |
| US11081345B2 (en) | 2018-02-06 | 2021-08-03 | Asm Ip Holding B.V. | Method of post-deposition treatment for silicon oxide film |
| WO2019158960A1 (en) | 2018-02-14 | 2019-08-22 | Asm Ip Holding B.V. | A method for depositing a ruthenium-containing film on a substrate by a cyclical deposition process |
| US10896820B2 (en) | 2018-02-14 | 2021-01-19 | Asm Ip Holding B.V. | Method for depositing a ruthenium-containing film on a substrate by a cyclical deposition process |
| US10731249B2 (en) | 2018-02-15 | 2020-08-04 | Asm Ip Holding B.V. | Method of forming a transition metal containing film on a substrate by a cyclical deposition process, a method for supplying a transition metal halide compound to a reaction chamber, and related vapor deposition apparatus |
| KR102636427B1 (ko) | 2018-02-20 | 2024-02-13 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 방법 및 장치 |
| US10975470B2 (en) | 2018-02-23 | 2021-04-13 | Asm Ip Holding B.V. | Apparatus for detecting or monitoring for a chemical precursor in a high temperature environment |
| US11473195B2 (en) | 2018-03-01 | 2022-10-18 | Asm Ip Holding B.V. | Semiconductor processing apparatus and a method for processing a substrate |
| US11629406B2 (en) | 2018-03-09 | 2023-04-18 | Asm Ip Holding B.V. | Semiconductor processing apparatus comprising one or more pyrometers for measuring a temperature of a substrate during transfer of the substrate |
| US11114283B2 (en) | 2018-03-16 | 2021-09-07 | Asm Ip Holding B.V. | Reactor, system including the reactor, and methods of manufacturing and using same |
| KR102646467B1 (ko) | 2018-03-27 | 2024-03-11 | 에이에스엠 아이피 홀딩 비.브이. | 기판 상에 전극을 형성하는 방법 및 전극을 포함하는 반도체 소자 구조 |
| US11230766B2 (en) | 2018-03-29 | 2022-01-25 | Asm Ip Holding B.V. | Substrate processing apparatus and method |
| US11088002B2 (en) | 2018-03-29 | 2021-08-10 | Asm Ip Holding B.V. | Substrate rack and a substrate processing system and method |
| KR102501472B1 (ko) | 2018-03-30 | 2023-02-20 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 방법 |
| KR102600229B1 (ko) | 2018-04-09 | 2023-11-10 | 에이에스엠 아이피 홀딩 비.브이. | 기판 지지 장치, 이를 포함하는 기판 처리 장치 및 기판 처리 방법 |
| TWI811348B (zh) | 2018-05-08 | 2023-08-11 | 荷蘭商Asm 智慧財產控股公司 | 藉由循環沉積製程於基板上沉積氧化物膜之方法及相關裝置結構 |
| US12025484B2 (en) | 2018-05-08 | 2024-07-02 | Asm Ip Holding B.V. | Thin film forming method |
| US12272527B2 (en) | 2018-05-09 | 2025-04-08 | Asm Ip Holding B.V. | Apparatus for use with hydrogen radicals and method of using same |
| KR20190129718A (ko) | 2018-05-11 | 2019-11-20 | 에이에스엠 아이피 홀딩 비.브이. | 기판 상에 피도핑 금속 탄화물 막을 형성하는 방법 및 관련 반도체 소자 구조 |
| KR102596988B1 (ko) | 2018-05-28 | 2023-10-31 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 방법 및 그에 의해 제조된 장치 |
| JP2019207930A (ja)* | 2018-05-29 | 2019-12-05 | 川崎重工業株式会社 | ロボットシステム |
| TWI840362B (zh) | 2018-06-04 | 2024-05-01 | 荷蘭商Asm Ip私人控股有限公司 | 水氣降低的晶圓處置腔室 |
| US11718913B2 (en) | 2018-06-04 | 2023-08-08 | Asm Ip Holding B.V. | Gas distribution system and reactor system including same |
| US11286562B2 (en) | 2018-06-08 | 2022-03-29 | Asm Ip Holding B.V. | Gas-phase chemical reactor and method of using same |
| US10797133B2 (en) | 2018-06-21 | 2020-10-06 | Asm Ip Holding B.V. | Method for depositing a phosphorus doped silicon arsenide film and related semiconductor device structures |
| KR102568797B1 (ko) | 2018-06-21 | 2023-08-21 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 시스템 |
| TWI873894B (zh) | 2018-06-27 | 2025-02-21 | 荷蘭商Asm Ip私人控股有限公司 | 用於形成含金屬材料及包含含金屬材料的膜及結構之循環沉積方法 |
| KR102854019B1 (ko) | 2018-06-27 | 2025-09-02 | 에이에스엠 아이피 홀딩 비.브이. | 금속 함유 재료를 형성하기 위한 주기적 증착 방법 및 금속 함유 재료를 포함하는 필름 및 구조체 |
| US10612136B2 (en) | 2018-06-29 | 2020-04-07 | ASM IP Holding, B.V. | Temperature-controlled flange and reactor system including same |
| KR102686758B1 (ko) | 2018-06-29 | 2024-07-18 | 에이에스엠 아이피 홀딩 비.브이. | 박막 증착 방법 및 반도체 장치의 제조 방법 |
| US10755922B2 (en) | 2018-07-03 | 2020-08-25 | Asm Ip Holding B.V. | Method for depositing silicon-free carbon-containing film as gap-fill layer by pulse plasma-assisted deposition |
| US10388513B1 (en) | 2018-07-03 | 2019-08-20 | Asm Ip Holding B.V. | Method for depositing silicon-free carbon-containing film as gap-fill layer by pulse plasma-assisted deposition |
| US10767789B2 (en) | 2018-07-16 | 2020-09-08 | Asm Ip Holding B.V. | Diaphragm valves, valve components, and methods for forming valve components |
| US11053591B2 (en) | 2018-08-06 | 2021-07-06 | Asm Ip Holding B.V. | Multi-port gas injection system and reactor system including same |
| US10883175B2 (en) | 2018-08-09 | 2021-01-05 | Asm Ip Holding B.V. | Vertical furnace for processing substrates and a liner for use therein |
| US10829852B2 (en) | 2018-08-16 | 2020-11-10 | Asm Ip Holding B.V. | Gas distribution device for a wafer processing apparatus |
| US11430674B2 (en) | 2018-08-22 | 2022-08-30 | Asm Ip Holding B.V. | Sensor array, apparatus for dispensing a vapor phase reactant to a reaction chamber and related methods |
| KR102707956B1 (ko) | 2018-09-11 | 2024-09-19 | 에이에스엠 아이피 홀딩 비.브이. | 박막 증착 방법 |
| US11024523B2 (en) | 2018-09-11 | 2021-06-01 | Asm Ip Holding B.V. | Substrate processing apparatus and method |
| US10636693B2 (en) | 2018-09-11 | 2020-04-28 | Kawasaki Jukogyo Kabushiki Kaisha | Substrate transfer device and control method therefor |
| US11049751B2 (en) | 2018-09-14 | 2021-06-29 | Asm Ip Holding B.V. | Cassette supply system to store and handle cassettes and processing apparatus equipped therewith |
| CN110970344B (zh) | 2018-10-01 | 2024-10-25 | Asmip控股有限公司 | 衬底保持设备、包含所述设备的系统及其使用方法 |
| US11232963B2 (en) | 2018-10-03 | 2022-01-25 | Asm Ip Holding B.V. | Substrate processing apparatus and method |
| KR102592699B1 (ko) | 2018-10-08 | 2023-10-23 | 에이에스엠 아이피 홀딩 비.브이. | 기판 지지 유닛 및 이를 포함하는 박막 증착 장치와 기판 처리 장치 |
| US10847365B2 (en) | 2018-10-11 | 2020-11-24 | Asm Ip Holding B.V. | Method of forming conformal silicon carbide film by cyclic CVD |
| US10811256B2 (en) | 2018-10-16 | 2020-10-20 | Asm Ip Holding B.V. | Method for etching a carbon-containing feature |
| KR102546322B1 (ko) | 2018-10-19 | 2023-06-21 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 및 기판 처리 방법 |
| KR102605121B1 (ko) | 2018-10-19 | 2023-11-23 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 및 기판 처리 방법 |
| USD948463S1 (en) | 2018-10-24 | 2022-04-12 | Asm Ip Holding B.V. | Susceptor for semiconductor substrate supporting apparatus |
| US12378665B2 (en) | 2018-10-26 | 2025-08-05 | Asm Ip Holding B.V. | High temperature coatings for a preclean and etch apparatus and related methods |
| US11087997B2 (en) | 2018-10-31 | 2021-08-10 | Asm Ip Holding B.V. | Substrate processing apparatus for processing substrates |
| KR102748291B1 (ko) | 2018-11-02 | 2024-12-31 | 에이에스엠 아이피 홀딩 비.브이. | 기판 지지 유닛 및 이를 포함하는 기판 처리 장치 |
| US11572620B2 (en) | 2018-11-06 | 2023-02-07 | Asm Ip Holding B.V. | Methods for selectively depositing an amorphous silicon film on a substrate |
| US11031242B2 (en) | 2018-11-07 | 2021-06-08 | Asm Ip Holding B.V. | Methods for depositing a boron doped silicon germanium film |
| US10847366B2 (en) | 2018-11-16 | 2020-11-24 | Asm Ip Holding B.V. | Methods for depositing a transition metal chalcogenide film on a substrate by a cyclical deposition process |
| US10818758B2 (en) | 2018-11-16 | 2020-10-27 | Asm Ip Holding B.V. | Methods for forming a metal silicate film on a substrate in a reaction chamber and related semiconductor device structures |
| US12040199B2 (en) | 2018-11-28 | 2024-07-16 | Asm Ip Holding B.V. | Substrate processing apparatus for processing substrates |
| US11217444B2 (en) | 2018-11-30 | 2022-01-04 | Asm Ip Holding B.V. | Method for forming an ultraviolet radiation responsive metal oxide-containing film |
| KR102636428B1 (ko) | 2018-12-04 | 2024-02-13 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치를 세정하는 방법 |
| US11158513B2 (en) | 2018-12-13 | 2021-10-26 | Asm Ip Holding B.V. | Methods for forming a rhenium-containing film on a substrate by a cyclical deposition process and related semiconductor device structures |
| TWI874340B (zh) | 2018-12-14 | 2025-03-01 | 荷蘭商Asm Ip私人控股有限公司 | 形成裝置結構之方法、其所形成之結構及施行其之系統 |
| TWI866480B (zh) | 2019-01-17 | 2024-12-11 | 荷蘭商Asm Ip 私人控股有限公司 | 藉由循環沈積製程於基板上形成含過渡金屬膜之方法 |
| KR102727227B1 (ko) | 2019-01-22 | 2024-11-07 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| CN111524788B (zh) | 2019-02-01 | 2023-11-24 | Asm Ip私人控股有限公司 | 氧化硅的拓扑选择性膜形成的方法 |
| TWI873122B (zh) | 2019-02-20 | 2025-02-21 | 荷蘭商Asm Ip私人控股有限公司 | 填充一基板之一表面內所形成的一凹槽的方法、根據其所形成之半導體結構、及半導體處理設備 |
| TWI845607B (zh) | 2019-02-20 | 2024-06-21 | 荷蘭商Asm Ip私人控股有限公司 | 用來填充形成於基材表面內之凹部的循環沉積方法及設備 |
| TWI838458B (zh) | 2019-02-20 | 2024-04-11 | 荷蘭商Asm Ip私人控股有限公司 | 用於3d nand應用中之插塞填充沉積之設備及方法 |
| KR102626263B1 (ko) | 2019-02-20 | 2024-01-16 | 에이에스엠 아이피 홀딩 비.브이. | 처리 단계를 포함하는 주기적 증착 방법 및 이를 위한 장치 |
| TWI842826B (zh) | 2019-02-22 | 2024-05-21 | 荷蘭商Asm Ip私人控股有限公司 | 基材處理設備及處理基材之方法 |
| US11742198B2 (en) | 2019-03-08 | 2023-08-29 | Asm Ip Holding B.V. | Structure including SiOCN layer and method of forming same |
| KR102858005B1 (ko) | 2019-03-08 | 2025-09-09 | 에이에스엠 아이피 홀딩 비.브이. | 실리콘 질화물 층을 선택적으로 증착하는 방법, 및 선택적으로 증착된 실리콘 질화물 층을 포함하는 구조체 |
| KR102782593B1 (ko) | 2019-03-08 | 2025-03-14 | 에이에스엠 아이피 홀딩 비.브이. | SiOC 층을 포함한 구조체 및 이의 형성 방법 |
| JP2020167398A (ja) | 2019-03-28 | 2020-10-08 | エーエスエム・アイピー・ホールディング・ベー・フェー | ドアオープナーおよびドアオープナーが提供される基材処理装置 |
| KR102809999B1 (ko) | 2019-04-01 | 2025-05-19 | 에이에스엠 아이피 홀딩 비.브이. | 반도체 소자를 제조하는 방법 |
| US11279032B2 (en)* | 2019-04-11 | 2022-03-22 | Applied Materials, Inc. | Apparatus, systems, and methods for improved joint coordinate teaching accuracy of robots |
| KR20200123380A (ko) | 2019-04-19 | 2020-10-29 | 에이에스엠 아이피 홀딩 비.브이. | 층 형성 방법 및 장치 |
| KR20200125453A (ko) | 2019-04-24 | 2020-11-04 | 에이에스엠 아이피 홀딩 비.브이. | 기상 반응기 시스템 및 이를 사용하는 방법 |
| US11289326B2 (en) | 2019-05-07 | 2022-03-29 | Asm Ip Holding B.V. | Method for reforming amorphous carbon polymer film |
| KR20200130121A (ko) | 2019-05-07 | 2020-11-18 | 에이에스엠 아이피 홀딩 비.브이. | 딥 튜브가 있는 화학물질 공급원 용기 |
| KR20200130652A (ko) | 2019-05-10 | 2020-11-19 | 에이에스엠 아이피 홀딩 비.브이. | 표면 상에 재료를 증착하는 방법 및 본 방법에 따라 형성된 구조 |
| JP7598201B2 (ja) | 2019-05-16 | 2024-12-11 | エーエスエム・アイピー・ホールディング・ベー・フェー | ウェハボートハンドリング装置、縦型バッチ炉および方法 |
| JP7612342B2 (ja) | 2019-05-16 | 2025-01-14 | エーエスエム・アイピー・ホールディング・ベー・フェー | ウェハボートハンドリング装置、縦型バッチ炉および方法 |
| USD947913S1 (en) | 2019-05-17 | 2022-04-05 | Asm Ip Holding B.V. | Susceptor shaft |
| USD975665S1 (en) | 2019-05-17 | 2023-01-17 | Asm Ip Holding B.V. | Susceptor shaft |
| USD935572S1 (en) | 2019-05-24 | 2021-11-09 | Asm Ip Holding B.V. | Gas channel plate |
| USD922229S1 (en) | 2019-06-05 | 2021-06-15 | Asm Ip Holding B.V. | Device for controlling a temperature of a gas supply unit |
| KR20200141002A (ko) | 2019-06-06 | 2020-12-17 | 에이에스엠 아이피 홀딩 비.브이. | 배기 가스 분석을 포함한 기상 반응기 시스템을 사용하는 방법 |
| KR20200141931A (ko) | 2019-06-10 | 2020-12-21 | 에이에스엠 아이피 홀딩 비.브이. | 석영 에피택셜 챔버를 세정하는 방법 |
| KR20200143254A (ko) | 2019-06-11 | 2020-12-23 | 에이에스엠 아이피 홀딩 비.브이. | 개질 가스를 사용하여 전자 구조를 형성하는 방법, 상기 방법을 수행하기 위한 시스템, 및 상기 방법을 사용하여 형성되는 구조 |
| USD944946S1 (en) | 2019-06-14 | 2022-03-01 | Asm Ip Holding B.V. | Shower plate |
| USD931978S1 (en) | 2019-06-27 | 2021-09-28 | Asm Ip Holding B.V. | Showerhead vacuum transport |
| KR20210005515A (ko) | 2019-07-03 | 2021-01-14 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치용 온도 제어 조립체 및 이를 사용하는 방법 |
| JP7499079B2 (ja) | 2019-07-09 | 2024-06-13 | エーエスエム・アイピー・ホールディング・ベー・フェー | 同軸導波管を用いたプラズマ装置、基板処理方法 |
| CN112216646A (zh) | 2019-07-10 | 2021-01-12 | Asm Ip私人控股有限公司 | 基板支撑组件及包括其的基板处理装置 |
| KR20210010307A (ko) | 2019-07-16 | 2021-01-27 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| KR102860110B1 (ko) | 2019-07-17 | 2025-09-16 | 에이에스엠 아이피 홀딩 비.브이. | 실리콘 게르마늄 구조를 형성하는 방법 |
| KR20210010816A (ko) | 2019-07-17 | 2021-01-28 | 에이에스엠 아이피 홀딩 비.브이. | 라디칼 보조 점화 플라즈마 시스템 및 방법 |
| US11643724B2 (en) | 2019-07-18 | 2023-05-09 | Asm Ip Holding B.V. | Method of forming structures using a neutral beam |
| KR20210010817A (ko) | 2019-07-19 | 2021-01-28 | 에이에스엠 아이피 홀딩 비.브이. | 토폴로지-제어된 비정질 탄소 중합체 막을 형성하는 방법 |
| TWI839544B (zh) | 2019-07-19 | 2024-04-21 | 荷蘭商Asm Ip私人控股有限公司 | 形成形貌受控的非晶碳聚合物膜之方法 |
| TWI851767B (zh) | 2019-07-29 | 2024-08-11 | 荷蘭商Asm Ip私人控股有限公司 | 用於利用n型摻雜物及/或替代摻雜物選擇性沉積以達成高摻雜物併入之方法 |
| US12169361B2 (en) | 2019-07-30 | 2024-12-17 | Asm Ip Holding B.V. | Substrate processing apparatus and method |
| CN112309899A (zh) | 2019-07-30 | 2021-02-02 | Asm Ip私人控股有限公司 | 基板处理设备 |
| CN112309900A (zh) | 2019-07-30 | 2021-02-02 | Asm Ip私人控股有限公司 | 基板处理设备 |
| US11587815B2 (en) | 2019-07-31 | 2023-02-21 | Asm Ip Holding B.V. | Vertical batch furnace assembly |
| US11587814B2 (en) | 2019-07-31 | 2023-02-21 | Asm Ip Holding B.V. | Vertical batch furnace assembly |
| US11227782B2 (en) | 2019-07-31 | 2022-01-18 | Asm Ip Holding B.V. | Vertical batch furnace assembly |
| CN112323048B (zh) | 2019-08-05 | 2024-02-09 | Asm Ip私人控股有限公司 | 用于化学源容器的液位传感器 |
| CN112342526A (zh) | 2019-08-09 | 2021-02-09 | Asm Ip私人控股有限公司 | 包括冷却装置的加热器组件及其使用方法 |
| USD965524S1 (en) | 2019-08-19 | 2022-10-04 | Asm Ip Holding B.V. | Susceptor support |
| USD965044S1 (en) | 2019-08-19 | 2022-09-27 | Asm Ip Holding B.V. | Susceptor shaft |
| JP2021031769A (ja) | 2019-08-21 | 2021-03-01 | エーエスエム アイピー ホールディング ビー.ブイ. | 成膜原料混合ガス生成装置及び成膜装置 |
| USD949319S1 (en) | 2019-08-22 | 2022-04-19 | Asm Ip Holding B.V. | Exhaust duct |
| USD940837S1 (en) | 2019-08-22 | 2022-01-11 | Asm Ip Holding B.V. | Electrode |
| KR20210024423A (ko) | 2019-08-22 | 2021-03-05 | 에이에스엠 아이피 홀딩 비.브이. | 홀을 구비한 구조체를 형성하기 위한 방법 |
| USD930782S1 (en) | 2019-08-22 | 2021-09-14 | Asm Ip Holding B.V. | Gas distributor |
| USD979506S1 (en) | 2019-08-22 | 2023-02-28 | Asm Ip Holding B.V. | Insulator |
| US11286558B2 (en) | 2019-08-23 | 2022-03-29 | Asm Ip Holding B.V. | Methods for depositing a molybdenum nitride film on a surface of a substrate by a cyclical deposition process and related semiconductor device structures including a molybdenum nitride film |
| KR20210024420A (ko) | 2019-08-23 | 2021-03-05 | 에이에스엠 아이피 홀딩 비.브이. | 비스(디에틸아미노)실란을 사용하여 peald에 의해 개선된 품질을 갖는 실리콘 산화물 막을 증착하기 위한 방법 |
| KR102806450B1 (ko) | 2019-09-04 | 2025-05-12 | 에이에스엠 아이피 홀딩 비.브이. | 희생 캡핑 층을 이용한 선택적 증착 방법 |
| KR102733104B1 (ko) | 2019-09-05 | 2024-11-22 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| US11562901B2 (en) | 2019-09-25 | 2023-01-24 | Asm Ip Holding B.V. | Substrate processing method |
| CN112593212B (zh) | 2019-10-02 | 2023-12-22 | Asm Ip私人控股有限公司 | 通过循环等离子体增强沉积工艺形成拓扑选择性氧化硅膜的方法 |
| KR20210042810A (ko) | 2019-10-08 | 2021-04-20 | 에이에스엠 아이피 홀딩 비.브이. | 활성 종을 이용하기 위한 가스 분배 어셈블리를 포함한 반응기 시스템 및 이를 사용하는 방법 |
| TWI846953B (zh) | 2019-10-08 | 2024-07-01 | 荷蘭商Asm Ip私人控股有限公司 | 基板處理裝置 |
| TW202128273A (zh) | 2019-10-08 | 2021-08-01 | 荷蘭商Asm Ip私人控股有限公司 | 氣體注入系統、及將材料沉積於反應室內之基板表面上的方法 |
| TWI846966B (zh) | 2019-10-10 | 2024-07-01 | 荷蘭商Asm Ip私人控股有限公司 | 形成光阻底層之方法及包括光阻底層之結構 |
| US12009241B2 (en) | 2019-10-14 | 2024-06-11 | Asm Ip Holding B.V. | Vertical batch furnace assembly with detector to detect cassette |
| TWI834919B (zh) | 2019-10-16 | 2024-03-11 | 荷蘭商Asm Ip私人控股有限公司 | 氧化矽之拓撲選擇性膜形成之方法 |
| US11637014B2 (en) | 2019-10-17 | 2023-04-25 | Asm Ip Holding B.V. | Methods for selective deposition of doped semiconductor material |
| KR102845724B1 (ko) | 2019-10-21 | 2025-08-13 | 에이에스엠 아이피 홀딩 비.브이. | 막을 선택적으로 에칭하기 위한 장치 및 방법 |
| KR20210050453A (ko) | 2019-10-25 | 2021-05-07 | 에이에스엠 아이피 홀딩 비.브이. | 기판 표면 상의 갭 피처를 충진하는 방법 및 이와 관련된 반도체 소자 구조 |
| US11646205B2 (en) | 2019-10-29 | 2023-05-09 | Asm Ip Holding B.V. | Methods of selectively forming n-type doped material on a surface, systems for selectively forming n-type doped material, and structures formed using same |
| KR20210054983A (ko) | 2019-11-05 | 2021-05-14 | 에이에스엠 아이피 홀딩 비.브이. | 도핑된 반도체 층을 갖는 구조체 및 이를 형성하기 위한 방법 및 시스템 |
| US11501968B2 (en) | 2019-11-15 | 2022-11-15 | Asm Ip Holding B.V. | Method for providing a semiconductor device with silicon filled gaps |
| KR102861314B1 (ko) | 2019-11-20 | 2025-09-17 | 에이에스엠 아이피 홀딩 비.브이. | 기판의 표면 상에 탄소 함유 물질을 증착하는 방법, 상기 방법을 사용하여 형성된 구조물, 및 상기 구조물을 형성하기 위한 시스템 |
| US11450529B2 (en) | 2019-11-26 | 2022-09-20 | Asm Ip Holding B.V. | Methods for selectively forming a target film on a substrate comprising a first dielectric surface and a second metallic surface |
| CN112951697B (zh) | 2019-11-26 | 2025-07-29 | Asmip私人控股有限公司 | 基板处理设备 |
| CN112885692B (zh) | 2019-11-29 | 2025-08-15 | Asmip私人控股有限公司 | 基板处理设备 |
| CN120432376A (zh) | 2019-11-29 | 2025-08-05 | Asm Ip私人控股有限公司 | 基板处理设备 |
| JP7527928B2 (ja) | 2019-12-02 | 2024-08-05 | エーエスエム・アイピー・ホールディング・ベー・フェー | 基板処理装置、基板処理方法 |
| KR20210070898A (ko) | 2019-12-04 | 2021-06-15 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| US11370114B2 (en) | 2019-12-09 | 2022-06-28 | Applied Materials, Inc. | Autoteach enclosure system |
| JP2021091078A (ja) | 2019-12-10 | 2021-06-17 | 川崎重工業株式会社 | ロボット用コントローラ |
| KR20210078405A (ko) | 2019-12-17 | 2021-06-28 | 에이에스엠 아이피 홀딩 비.브이. | 바나듐 나이트라이드 층을 형성하는 방법 및 바나듐 나이트라이드 층을 포함하는 구조 |
| KR20210080214A (ko) | 2019-12-19 | 2021-06-30 | 에이에스엠 아이피 홀딩 비.브이. | 기판 상의 갭 피처를 충진하는 방법 및 이와 관련된 반도체 소자 구조 |
| JP7636892B2 (ja) | 2020-01-06 | 2025-02-27 | エーエスエム・アイピー・ホールディング・ベー・フェー | チャネル付きリフトピン |
| JP7730637B2 (ja) | 2020-01-06 | 2025-08-28 | エーエスエム・アイピー・ホールディング・ベー・フェー | ガス供給アセンブリ、その構成要素、およびこれを含む反応器システム |
| US11993847B2 (en) | 2020-01-08 | 2024-05-28 | Asm Ip Holding B.V. | Injector |
| KR20210093163A (ko) | 2020-01-16 | 2021-07-27 | 에이에스엠 아이피 홀딩 비.브이. | 고 종횡비 피처를 형성하는 방법 |
| KR102675856B1 (ko) | 2020-01-20 | 2024-06-17 | 에이에스엠 아이피 홀딩 비.브이. | 박막 형성 방법 및 박막 표면 개질 방법 |
| TWI889744B (zh) | 2020-01-29 | 2025-07-11 | 荷蘭商Asm Ip私人控股有限公司 | 污染物捕集系統、及擋板堆疊 |
| TW202513845A (zh) | 2020-02-03 | 2025-04-01 | 荷蘭商Asm Ip私人控股有限公司 | 半導體裝置結構及其形成方法 |
| KR20210100010A (ko) | 2020-02-04 | 2021-08-13 | 에이에스엠 아이피 홀딩 비.브이. | 대형 물품의 투과율 측정을 위한 방법 및 장치 |
| JP7545805B2 (ja)* | 2020-02-07 | 2024-09-05 | 川崎重工業株式会社 | ロボット及びそれを備えた基板搬送システム |
| US11776846B2 (en) | 2020-02-07 | 2023-10-03 | Asm Ip Holding B.V. | Methods for depositing gap filling fluids and related systems and devices |
| JP7542960B2 (ja)* | 2020-02-07 | 2024-09-02 | 川崎重工業株式会社 | 水平多関節ロボット及びそれを備えた基板搬送システム |
| TW202146691A (zh) | 2020-02-13 | 2021-12-16 | 荷蘭商Asm Ip私人控股有限公司 | 氣體分配總成、噴淋板總成、及調整至反應室之氣體的傳導率之方法 |
| KR20210103956A (ko) | 2020-02-13 | 2021-08-24 | 에이에스엠 아이피 홀딩 비.브이. | 수광 장치를 포함하는 기판 처리 장치 및 수광 장치의 교정 방법 |
| TWI855223B (zh) | 2020-02-17 | 2024-09-11 | 荷蘭商Asm Ip私人控股有限公司 | 用於生長磷摻雜矽層之方法 |
| CN113410160A (zh) | 2020-02-28 | 2021-09-17 | Asm Ip私人控股有限公司 | 专用于零件清洁的系统 |
| KR20210113043A (ko) | 2020-03-04 | 2021-09-15 | 에이에스엠 아이피 홀딩 비.브이. | 반응기 시스템용 정렬 고정구 |
| US11876356B2 (en) | 2020-03-11 | 2024-01-16 | Asm Ip Holding B.V. | Lockout tagout assembly and system and method of using same |
| KR20210116240A (ko) | 2020-03-11 | 2021-09-27 | 에이에스엠 아이피 홀딩 비.브이. | 조절성 접합부를 갖는 기판 핸들링 장치 |
| KR102775390B1 (ko) | 2020-03-12 | 2025-02-28 | 에이에스엠 아이피 홀딩 비.브이. | 타겟 토폴로지 프로파일을 갖는 층 구조를 제조하기 위한 방법 |
| US12173404B2 (en) | 2020-03-17 | 2024-12-24 | Asm Ip Holding B.V. | Method of depositing epitaxial material, structure formed using the method, and system for performing the method |
| KR102755229B1 (ko) | 2020-04-02 | 2025-01-14 | 에이에스엠 아이피 홀딩 비.브이. | 박막 형성 방법 |
| TWI887376B (zh) | 2020-04-03 | 2025-06-21 | 荷蘭商Asm Ip私人控股有限公司 | 半導體裝置的製造方法 |
| TWI888525B (zh) | 2020-04-08 | 2025-07-01 | 荷蘭商Asm Ip私人控股有限公司 | 用於選擇性蝕刻氧化矽膜之設備及方法 |
| US11821078B2 (en) | 2020-04-15 | 2023-11-21 | Asm Ip Holding B.V. | Method for forming precoat film and method for forming silicon-containing film |
| KR20210128343A (ko) | 2020-04-15 | 2021-10-26 | 에이에스엠 아이피 홀딩 비.브이. | 크롬 나이트라이드 층을 형성하는 방법 및 크롬 나이트라이드 층을 포함하는 구조 |
| US11996289B2 (en) | 2020-04-16 | 2024-05-28 | Asm Ip Holding B.V. | Methods of forming structures including silicon germanium and silicon layers, devices formed using the methods, and systems for performing the methods |
| KR20210130646A (ko) | 2020-04-21 | 2021-11-01 | 에이에스엠 아이피 홀딩 비.브이. | 기판을 처리하기 위한 방법 |
| KR102866804B1 (ko) | 2020-04-24 | 2025-09-30 | 에이에스엠 아이피 홀딩 비.브이. | 냉각 가스 공급부를 포함한 수직형 배치 퍼니스 어셈블리 |
| TW202208671A (zh) | 2020-04-24 | 2022-03-01 | 荷蘭商Asm Ip私人控股有限公司 | 形成包括硼化釩及磷化釩層的結構之方法 |
| CN113555279A (zh) | 2020-04-24 | 2021-10-26 | Asm Ip私人控股有限公司 | 形成含氮化钒的层的方法及包含其的结构 |
| KR20210132612A (ko) | 2020-04-24 | 2021-11-04 | 에이에스엠 아이피 홀딩 비.브이. | 바나듐 화합물들을 안정화하기 위한 방법들 및 장치 |
| KR20210132600A (ko) | 2020-04-24 | 2021-11-04 | 에이에스엠 아이피 홀딩 비.브이. | 바나듐, 질소 및 추가 원소를 포함한 층을 증착하기 위한 방법 및 시스템 |
| KR102783898B1 (ko) | 2020-04-29 | 2025-03-18 | 에이에스엠 아이피 홀딩 비.브이. | 고체 소스 전구체 용기 |
| KR20210134869A (ko) | 2020-05-01 | 2021-11-11 | 에이에스엠 아이피 홀딩 비.브이. | Foup 핸들러를 이용한 foup의 빠른 교환 |
| JP7726664B2 (ja) | 2020-05-04 | 2025-08-20 | エーエスエム・アイピー・ホールディング・ベー・フェー | 基板を処理するための基板処理システム |
| KR102788543B1 (ko) | 2020-05-13 | 2025-03-27 | 에이에스엠 아이피 홀딩 비.브이. | 반응기 시스템용 레이저 정렬 고정구 |
| TW202146699A (zh) | 2020-05-15 | 2021-12-16 | 荷蘭商Asm Ip私人控股有限公司 | 形成矽鍺層之方法、半導體結構、半導體裝置、形成沉積層之方法、及沉積系統 |
| KR20210143653A (ko) | 2020-05-19 | 2021-11-29 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| KR20210145079A (ko) | 2020-05-21 | 2021-12-01 | 에이에스엠 아이피 홀딩 비.브이. | 기판을 처리하기 위한 플랜지 및 장치 |
| KR102795476B1 (ko) | 2020-05-21 | 2025-04-11 | 에이에스엠 아이피 홀딩 비.브이. | 다수의 탄소 층을 포함한 구조체 및 이를 형성하고 사용하는 방법 |
| TWI873343B (zh) | 2020-05-22 | 2025-02-21 | 荷蘭商Asm Ip私人控股有限公司 | 用於在基材上形成薄膜之反應系統 |
| KR20210146802A (ko) | 2020-05-26 | 2021-12-06 | 에이에스엠 아이피 홀딩 비.브이. | 붕소 및 갈륨을 함유한 실리콘 게르마늄 층을 증착하는 방법 |
| TWI876048B (zh) | 2020-05-29 | 2025-03-11 | 荷蘭商Asm Ip私人控股有限公司 | 基板處理方法 |
| TW202212620A (zh) | 2020-06-02 | 2022-04-01 | 荷蘭商Asm Ip私人控股有限公司 | 處理基板之設備、形成膜之方法、及控制用於處理基板之設備之方法 |
| WO2021245956A1 (ja) | 2020-06-05 | 2021-12-09 | ローツェ株式会社 | ウエハ搬送装置、およびウエハ搬送方法 |
| TW202208659A (zh) | 2020-06-16 | 2022-03-01 | 荷蘭商Asm Ip私人控股有限公司 | 沉積含硼之矽鍺層的方法 |
| TW202218133A (zh) | 2020-06-24 | 2022-05-01 | 荷蘭商Asm Ip私人控股有限公司 | 形成含矽層之方法 |
| TWI873359B (zh) | 2020-06-30 | 2025-02-21 | 荷蘭商Asm Ip私人控股有限公司 | 基板處理方法 |
| US12431354B2 (en) | 2020-07-01 | 2025-09-30 | Asm Ip Holding B.V. | Silicon nitride and silicon oxide deposition methods using fluorine inhibitor |
| TW202202649A (zh) | 2020-07-08 | 2022-01-16 | 荷蘭商Asm Ip私人控股有限公司 | 基板處理方法 |
| KR20220010438A (ko) | 2020-07-17 | 2022-01-25 | 에이에스엠 아이피 홀딩 비.브이. | 포토리소그래피에 사용하기 위한 구조체 및 방법 |
| TWI878570B (zh) | 2020-07-20 | 2025-04-01 | 荷蘭商Asm Ip私人控股有限公司 | 用於沉積鉬層之方法及系統 |
| KR20220011092A (ko) | 2020-07-20 | 2022-01-27 | 에이에스엠 아이피 홀딩 비.브이. | 전이 금속층을 포함하는 구조체를 형성하기 위한 방법 및 시스템 |
| US12322591B2 (en) | 2020-07-27 | 2025-06-03 | Asm Ip Holding B.V. | Thin film deposition process |
| KR20220021863A (ko) | 2020-08-14 | 2022-02-22 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 방법 |
| US12040177B2 (en) | 2020-08-18 | 2024-07-16 | Asm Ip Holding B.V. | Methods for forming a laminate film by cyclical plasma-enhanced deposition processes |
| TW202228863A (zh) | 2020-08-25 | 2022-08-01 | 荷蘭商Asm Ip私人控股有限公司 | 清潔基板的方法、選擇性沉積的方法、及反應器系統 |
| US11725280B2 (en) | 2020-08-26 | 2023-08-15 | Asm Ip Holding B.V. | Method for forming metal silicon oxide and metal silicon oxynitride layers |
| TW202229601A (zh) | 2020-08-27 | 2022-08-01 | 荷蘭商Asm Ip私人控股有限公司 | 形成圖案化結構的方法、操控機械特性的方法、裝置結構、及基板處理系統 |
| TW202217045A (zh) | 2020-09-10 | 2022-05-01 | 荷蘭商Asm Ip私人控股有限公司 | 沉積間隙填充流體之方法及相關系統和裝置 |
| USD990534S1 (en) | 2020-09-11 | 2023-06-27 | Asm Ip Holding B.V. | Weighted lift pin |
| KR20220036866A (ko) | 2020-09-16 | 2022-03-23 | 에이에스엠 아이피 홀딩 비.브이. | 실리콘 산화물 증착 방법 |
| USD1012873S1 (en) | 2020-09-24 | 2024-01-30 | Asm Ip Holding B.V. | Electrode for semiconductor processing apparatus |
| TWI889903B (zh) | 2020-09-25 | 2025-07-11 | 荷蘭商Asm Ip私人控股有限公司 | 基板處理方法 |
| US12009224B2 (en) | 2020-09-29 | 2024-06-11 | Asm Ip Holding B.V. | Apparatus and method for etching metal nitrides |
| KR20220045900A (ko) | 2020-10-06 | 2022-04-13 | 에이에스엠 아이피 홀딩 비.브이. | 실리콘 함유 재료를 증착하기 위한 증착 방법 및 장치 |
| CN114293174A (zh) | 2020-10-07 | 2022-04-08 | Asm Ip私人控股有限公司 | 气体供应单元和包括气体供应单元的衬底处理设备 |
| TW202229613A (zh) | 2020-10-14 | 2022-08-01 | 荷蘭商Asm Ip私人控股有限公司 | 於階梯式結構上沉積材料的方法 |
| TW202232565A (zh) | 2020-10-15 | 2022-08-16 | 荷蘭商Asm Ip私人控股有限公司 | 製造半導體裝置之方法及使用乙太網路控制自動化技術之基板處理裝置 |
| TW202217037A (zh) | 2020-10-22 | 2022-05-01 | 荷蘭商Asm Ip私人控股有限公司 | 沉積釩金屬的方法、結構、裝置及沉積總成 |
| TW202223136A (zh) | 2020-10-28 | 2022-06-16 | 荷蘭商Asm Ip私人控股有限公司 | 用於在基板上形成層之方法、及半導體處理系統 |
| TW202229620A (zh) | 2020-11-12 | 2022-08-01 | 特文特大學 | 沉積系統、用於控制反應條件之方法、沉積方法 |
| TW202229795A (zh) | 2020-11-23 | 2022-08-01 | 荷蘭商Asm Ip私人控股有限公司 | 具注入器之基板處理設備 |
| TW202235649A (zh) | 2020-11-24 | 2022-09-16 | 荷蘭商Asm Ip私人控股有限公司 | 填充間隙之方法與相關之系統及裝置 |
| TW202235675A (zh) | 2020-11-30 | 2022-09-16 | 荷蘭商Asm Ip私人控股有限公司 | 注入器、及基板處理設備 |
| US12255053B2 (en) | 2020-12-10 | 2025-03-18 | Asm Ip Holding B.V. | Methods and systems for depositing a layer |
| TW202233884A (zh) | 2020-12-14 | 2022-09-01 | 荷蘭商Asm Ip私人控股有限公司 | 形成臨限電壓控制用之結構的方法 |
| US11946137B2 (en) | 2020-12-16 | 2024-04-02 | Asm Ip Holding B.V. | Runout and wobble measurement fixtures |
| TW202232639A (zh) | 2020-12-18 | 2022-08-16 | 荷蘭商Asm Ip私人控股有限公司 | 具有可旋轉台的晶圓處理設備 |
| TW202231903A (zh) | 2020-12-22 | 2022-08-16 | 荷蘭商Asm Ip私人控股有限公司 | 過渡金屬沉積方法、過渡金屬層、用於沉積過渡金屬於基板上的沉積總成 |
| TW202242184A (zh) | 2020-12-22 | 2022-11-01 | 荷蘭商Asm Ip私人控股有限公司 | 前驅物膠囊、前驅物容器、氣相沉積總成、及將固態前驅物裝載至前驅物容器中之方法 |
| TW202226899A (zh) | 2020-12-22 | 2022-07-01 | 荷蘭商Asm Ip私人控股有限公司 | 具匹配器的電漿處理裝置 |
| TW202249142A (zh) | 2021-02-25 | 2022-12-16 | 日商東京威力科創股份有限公司 | 基板搬送機構及基板搬送方法 |
| USD980814S1 (en) | 2021-05-11 | 2023-03-14 | Asm Ip Holding B.V. | Gas distributor for substrate processing apparatus |
| USD1023959S1 (en) | 2021-05-11 | 2024-04-23 | Asm Ip Holding B.V. | Electrode for substrate processing apparatus |
| USD981973S1 (en) | 2021-05-11 | 2023-03-28 | Asm Ip Holding B.V. | Reactor wall for substrate processing apparatus |
| USD980813S1 (en) | 2021-05-11 | 2023-03-14 | Asm Ip Holding B.V. | Gas flow control plate for substrate processing apparatus |
| USD990441S1 (en) | 2021-09-07 | 2023-06-27 | Asm Ip Holding B.V. | Gas flow control plate |
| USD1060598S1 (en) | 2021-12-03 | 2025-02-04 | Asm Ip Holding B.V. | Split showerhead cover |
| WO2023188177A1 (ja)* | 2022-03-30 | 2023-10-05 | 平田機工株式会社 | 基板搬送システム及び移載ロボット制御装置 |
| KR20250006926A (ko)* | 2022-04-22 | 2025-01-13 | 램 리써치 코포레이션 | 로봇을 갖는 얕은 깊이의 장비 프론트 엔드 모듈 |
| KR102788691B1 (ko)* | 2022-10-31 | 2025-03-28 | 세메스 주식회사 | 기판 반송 로봇 및 이를 포함하는 기판 처리 시스템 |
Family Cites Families (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB8709064D0 (en) | 1986-04-28 | 1987-05-20 | Varian Associates | Wafer handling arm |
| JPS63272474A (ja) | 1987-04-30 | 1988-11-09 | 日本電子株式会社 | 試料搬送ア−ム |
| KR100267617B1 (ko) | 1993-04-23 | 2000-10-16 | 히가시 데쓰로 | 진공처리장치 및 진공처리방법 |
| JP3671983B2 (ja) | 1993-10-22 | 2005-07-13 | 東京エレクトロン株式会社 | 真空処理装置 |
| JP3453223B2 (ja) | 1994-08-19 | 2003-10-06 | 東京エレクトロン株式会社 | 処理装置 |
| TW295677B (ja) | 1994-08-19 | 1997-01-11 | Tokyo Electron Co Ltd | |
| JP3965343B2 (ja) | 1994-08-19 | 2007-08-29 | 東京エレクトロン株式会社 | 処理装置 |
| JPH09216180A (ja)* | 1996-02-08 | 1997-08-19 | Hitachi Ltd | 半導体ウェハカセット搬送システム |
| US6121743A (en) | 1996-03-22 | 2000-09-19 | Genmark Automation, Inc. | Dual robotic arm end effectors having independent yaw motion |
| JPH1133949A (ja) | 1997-07-14 | 1999-02-09 | Fanuc Ltd | 産業用ロボット |
| JPH1174328A (ja) | 1997-08-28 | 1999-03-16 | Nec Kansai Ltd | ウエハ処理装置 |
| JPH11157609A (ja) | 1997-11-28 | 1999-06-15 | Komatsu Engineering Kk | ウエハ分類装置 |
| US6215897B1 (en) | 1998-05-20 | 2001-04-10 | Applied Komatsu Technology, Inc. | Automated substrate processing system |
| JP2000141272A (ja) | 1998-09-10 | 2000-05-23 | Fanuc Ltd | 産業用ロボット |
| JP2000133690A (ja) | 1998-10-26 | 2000-05-12 | Rorze Corp | ウエハ搬送装置 |
| JP2000174091A (ja)* | 1998-12-01 | 2000-06-23 | Fujitsu Ltd | 搬送装置及び製造装置 |
| US6244811B1 (en)* | 1999-06-29 | 2001-06-12 | Lam Research Corporation | Atmospheric wafer transfer module with nest for wafer transport robot |
| US6297611B1 (en) | 2000-07-06 | 2001-10-02 | Genmark Automation | Robot having independent end effector linkage motion |
| JP2002158272A (ja)* | 2000-11-17 | 2002-05-31 | Tatsumo Kk | ダブルアーム基板搬送装置 |
| JP3565177B2 (ja) | 2001-03-19 | 2004-09-15 | ダイキン工業株式会社 | 真空搬送装置 |
| JP4199432B2 (ja) | 2001-03-30 | 2008-12-17 | 芝浦メカトロニクス株式会社 | ロボット装置及び処理装置 |
| JP2002359273A (ja) | 2001-06-01 | 2002-12-13 | Takehide Hayashi | ウェハー搬送容器用オープナー |
| US6585470B2 (en)* | 2001-06-19 | 2003-07-01 | Brooks Automation, Inc. | System for transporting substrates |
| JP4709436B2 (ja) | 2001-07-13 | 2011-06-22 | 株式会社ダイヘン | ワーク搬送用ロボット |
| JP3880343B2 (ja) | 2001-08-01 | 2007-02-14 | 株式会社ルネサステクノロジ | ロードポート、基板処理装置および雰囲気置換方法 |
| JP4327599B2 (ja)* | 2001-11-29 | 2009-09-09 | ダイアモンド セミコンダクタ グループ エルエルシー | ウエーハ取り扱い装置及び方法 |
| JP2003170384A (ja) | 2001-12-04 | 2003-06-17 | Rorze Corp | 平板状物の搬送用スカラ型ロボットおよび平板状物の処理システム |
| JP4070994B2 (ja) | 2001-12-20 | 2008-04-02 | 株式会社ダイヘン | ワーク搬送用ロボット及びこのロボットを備えたワーク加工装置 |
| US6824343B2 (en)* | 2002-02-22 | 2004-11-30 | Applied Materials, Inc. | Substrate support |
| JP3623205B2 (ja)* | 2002-03-22 | 2005-02-23 | 株式会社半導体理工学研究センター | アナログ/ディジタルコンバータ |
| US20030202865A1 (en)* | 2002-04-25 | 2003-10-30 | Applied Materials, Inc. | Substrate transfer apparatus |
| JP3928527B2 (ja) | 2002-09-13 | 2007-06-13 | 東京エレクトロン株式会社 | ティーチング方法及び基板処理システム |
| JP3970749B2 (ja) | 2002-10-30 | 2007-09-05 | 日本電産サンキョー株式会社 | 産業用ロボット |
| JP4277100B2 (ja) | 2002-11-14 | 2009-06-10 | 東京エレクトロン株式会社 | 搬送機構の基準位置補正装置及び基準位置補正方法 |
| JP4344593B2 (ja) | 2002-12-02 | 2009-10-14 | ローツェ株式会社 | ミニエンバイロメント装置、薄板状物製造システム及び清浄容器の雰囲気置換方法 |
| JP2004235516A (ja) | 2003-01-31 | 2004-08-19 | Trecenti Technologies Inc | ウエハ収納治具のパージ方法、ロードポートおよび半導体装置の製造方法 |
| TWI228750B (en)* | 2003-02-25 | 2005-03-01 | Samsung Electronics Co Ltd | Apparatus and method for processing wafers |
| JP3674864B2 (ja)* | 2003-03-25 | 2005-07-27 | 忠素 玉井 | 真空処理装置 |
| JP3999712B2 (ja) | 2003-07-14 | 2007-10-31 | 川崎重工業株式会社 | 多関節ロボット |
| US7107125B2 (en) | 2003-10-29 | 2006-09-12 | Applied Materials, Inc. | Method and apparatus for monitoring the position of a semiconductor processing robot |
| US7665946B2 (en)* | 2003-11-04 | 2010-02-23 | Advanced Display Process Engineering Co., Ltd. | Transfer chamber for flat display device manufacturing apparatus |
| KR100583727B1 (ko)* | 2004-01-07 | 2006-05-25 | 삼성전자주식회사 | 기판 제조 장치 및 이에 사용되는 기판 이송 모듈 |
| US7226269B2 (en)* | 2004-01-15 | 2007-06-05 | Applied Materials, Inc. | Substrate edge grip apparatus |
| US20060045668A1 (en)* | 2004-07-19 | 2006-03-02 | Grabowski Al W | System for handling of wafers within a process tool |
| JP2006073834A (ja) | 2004-09-02 | 2006-03-16 | Dainippon Screen Mfg Co Ltd | 基板搬送装置およびそれを用いた基板処理装置 |
| JP4907077B2 (ja)* | 2004-11-30 | 2012-03-28 | 株式会社Sen | ウエハ処理装置及びウエハ処理方法並びにイオン注入装置 |
| JP4579723B2 (ja) | 2005-03-07 | 2010-11-10 | 川崎重工業株式会社 | 搬送系ユニットおよび分割体 |
| US9248568B2 (en) | 2005-07-11 | 2016-02-02 | Brooks Automation, Inc. | Unequal link SCARA arm |
| JP4098338B2 (ja)* | 2006-07-20 | 2008-06-11 | 川崎重工業株式会社 | ウェハ移載装置および基板移載装置 |
- 2006
- 2006-07-20JPJP2006198771Apatent/JP4098338B2/jaactiveActive
- 2007
- 2007-07-18USUS11/879,509patent/US7874782B2/ennot_activeCeased
- 2007-07-19KRKR1020070072303Apatent/KR100909727B1/koactiveActive
- 2007-07-19EPEP07112793.0Apatent/EP1881526B1/enactiveActive
- 2013
- 2013-01-25USUS13/750,625patent/USRE45772E1/enactiveActive
- 2015
- 2015-09-14USUS14/852,993patent/USRE46465E1/enactiveActive
- 2017
- 2017-05-18USUS15/599,227patent/USRE47145E1/enactiveActive
- 2018
- 2018-05-10USUS15/976,405patent/USRE47909E1/enactiveActive
- 2018-11-01USUS16/178,125patent/USRE48031E1/enactiveActive
- 2020
- 2020-05-08USUS16/869,962patent/USRE48792E1/enactiveActive
- 2021
- 2021-10-01USUS17/492,300patent/USRE49671E1/enactiveActive
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9252035B2 (en) | 2012-11-09 | 2016-02-02 | Kabushiki Kaisha Yaskawa Denki | Substrate transfer system, substrate processing system, and substrate transfer robot |
| US9252036B2 (en) | 2012-11-09 | 2016-02-02 | Kabushiki Kaisha Yaskawa Denki | Substrate transfer system, substrate processing system, and substrate transfer robot |
| US9293355B2 (en) | 2012-11-09 | 2016-03-22 | Kabushiki Kaisha Yaskawa Denki | Substrate transfer system and substrate processing system |
| US9570336B2 (en) | 2012-11-09 | 2017-02-14 | Kabushiki Kaisha Yaskawa Denki | Substrate transfer system and substrate processing system |
| US9620405B2 (en) | 2012-11-09 | 2017-04-11 | Kabushiki Kaisha Yaskawa Denki | Substrate transfer system, substrate processing system, and substrate transfer robot |
| US10724942B2 (en) | 2017-02-10 | 2020-07-28 | Kabushiki Kaisha Toshiba | Inspection apparatus and inspection method |
| JP2023019386A (ja)* | 2021-07-29 | 2023-02-09 | シンフォニアテクノロジー株式会社 | 基板搬送装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR100909727B1 (ko) | 2009-07-29 |
| JP2008028134A (ja) | 2008-02-07 |
| USRE47909E1 (en) | 2020-03-17 |
| KR20080008981A (ko) | 2008-01-24 |
| USRE46465E1 (en) | 2017-07-04 |
| EP1881526B1 (en) | 2015-03-04 |
| EP1881526A3 (en) | 2009-04-01 |
| USRE48031E1 (en) | 2020-06-02 |
| USRE48792E1 (en) | 2021-10-26 |
| US7874782B2 (en) | 2011-01-25 |
| USRE47145E1 (en) | 2018-11-27 |
| USRE45772E1 (en) | 2015-10-20 |
| USRE49671E1 (en) | 2023-09-26 |
| EP1881526A2 (en) | 2008-01-23 |
| US20080025824A1 (en) | 2008-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4098338B2 (ja) | ウェハ移載装置および基板移載装置 | |
| JP4980127B2 (ja) | 基板搬送ロボット | |
| JP4746027B2 (ja) | 基板搬送方法 | |
| JP2008103755A5 (ja) | ||
| JP2024169655A (ja) | 基板搬送ロボット | |
| EP1892755B1 (en) | Substrate Container Opener and Opener-Side Door Drive Mechanism Thereof | |
| JP2012035408A (ja) | 基板搬送ロボット | |
| CN115088062B (zh) | 水平多关节机器人以及包括水平多关节机器人的基板运送系统 | |
| TWI839595B (zh) | 機器人以及包括機器人的基板運送系統 | |
| JP6027661B2 (ja) | 基板搬送ロボット | |
| JP6649995B2 (ja) | 基板搬送ロボット | |
| JP5819357B2 (ja) | 基板搬送装置および基板搬送ロボット | |
| JP2011161629A (ja) | 基板搬送ロボット | |
| JP5819356B2 (ja) | 基板搬送ロボットおよび基板搬送装置 | |
| JP2018152610A (ja) | 基板搬送ロボット | |
| JP2018152609A (ja) | 基板搬送ロボット | |
| JP2013016843A (ja) | 基板搬送ロボット、基板搬送装置および半導体処理設備 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20070821 | |
| A871 | Explanation of circumstances concerning accelerated examination | Free format text:JAPANESE INTERMEDIATE CODE: A871 Effective date:20070821 | |
| A975 | Report on accelerated examination | Free format text:JAPANESE INTERMEDIATE CODE: A971005 Effective date:20071002 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20071009 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20071210 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20080311 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20080312 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:4098338 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 Free format text:JAPANESE INTERMEDIATE CODE: R150 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20110321 Year of fee payment:3 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20120321 Year of fee payment:4 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20120321 Year of fee payment:4 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20130321 Year of fee payment:5 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20130321 Year of fee payment:5 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20140321 Year of fee payment:6 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20150321 Year of fee payment:7 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 |