JP3969373B2 - Navigation device - Google Patents
Navigation deviceDownload PDFInfo
- Publication number
- JP3969373B2 JP3969373B2JP2003334856AJP2003334856AJP3969373B2JP 3969373 B2JP3969373 B2JP 3969373B2JP 2003334856 AJP2003334856 AJP 2003334856AJP 2003334856 AJP2003334856 AJP 2003334856AJP 3969373 B2JP3969373 B2JP 3969373B2
- Authority
- JP
- Japan
- Prior art keywords
- route
- storage
- destination
- searched
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003860storageMethods0.000claimsdescription207
- 238000000034methodMethods0.000description28
- 230000015654memoryEffects0.000description16
- 238000012545processingMethods0.000description12
- 238000004891communicationMethods0.000description10
- 238000010586diagramMethods0.000description8
- 238000001514detection methodMethods0.000description7
- 230000003287optical effectEffects0.000description7
- 230000006870functionEffects0.000description3
- 230000001133accelerationEffects0.000description2
- 238000004519manufacturing processMethods0.000description2
- 239000004065semiconductorSubstances0.000description2
- 206010039203Road traffic accidentDiseases0.000description1
- 230000001413cellular effectEffects0.000description1
- 230000000694effectsEffects0.000description1
- 238000005516engineering processMethods0.000description1
- 239000004973liquid crystal related substanceSubstances0.000description1
- 238000005259measurementMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 238000003825pressingMethods0.000description1
- 230000003936working memoryEffects0.000description1
Images










Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Description
Translated fromJapanese本発明は、ナビゲーション装置に関するものである。 The present invention relates to a navigation device.
従来、自動車等の車両に搭載されたナビゲーション装置においては、運転者等の操作者が所定の入力部を操作して目的地を設定すると、現在位置検出処理部によって検出された車両の現在位置を出発地として、該出発地から目的地までの経路が探索され、案内される。この場合、出発地から目的地までの距離が最短となるように経路を探索したり、所要時間が最短となるように経路を探索するようになっている。 Conventionally, in a navigation apparatus mounted on a vehicle such as an automobile, when an operator such as a driver operates a predetermined input unit to set a destination, the current position of the vehicle detected by the current position detection processing unit is determined. As a starting point, a route from the starting point to the destination is searched and guided. In this case, the route is searched so that the distance from the departure point to the destination is the shortest, or the route is searched so that the required time is the shortest.
もっとも、一般的に、ナビゲーション装置は比較的大きな道路を通るように経路を設定し、また、実際の交通量、運転のし易さ等が十分に反映されないので、必ずしも所要時間が最短となる経路が設定されるとは限らない。さらに、操作者の好み(例えば、できるだけ右折をしないような経路を好む等)が反映されることもない。そこで、出発地及び目的地に対応する経路を記憶手段に記憶させておき、前記経路の探索コストを下げる技術や、過去において車両が走行した軌跡を記憶手段に記憶させておき、今回の経路探索における出発地及び目的地が前記軌跡上に存在する場合に、該軌跡を使用して経路を設定する技術が提案されている(例えば、特許文献1参照。)。 However, in general, the navigation device sets the route so as to pass a relatively large road, and the actual traffic volume, ease of driving, etc. are not sufficiently reflected, so the route that requires the shortest time is not necessarily required. Is not always set. Furthermore, the preference of the operator (for example, the user prefers a route that does not turn right as much as possible) is not reflected. Therefore, the route corresponding to the departure point and the destination is stored in the storage unit, the technology for reducing the search cost of the route, the trajectory of the vehicle traveling in the past is stored in the storage unit, and the route search this time A technique has been proposed in which a route is set using a locus when a starting point and a destination are located on the locus (see, for example, Patent Document 1).
これにより、操作者が実際に走行した経験に基づいて所要時間が最短となる経路や、操作者の好みに合致した経路を設定することができる。
しかしながら、前記従来のナビゲーション装置においては、出発地及び目的地の両方が一致する場合でないと記憶された経路や軌跡を利用することができなかった。そのため、例えば、遠隔地から自宅に帰宅する経路を探索するような場合に、操作者が熟知している自宅周辺のエリアにおいて、所要時間が最短とならない経路や操作者の好みに反する経路、すなわち、操作者にとって不適切な経路が設定されてしまうことがある。 However, in the conventional navigation device, the stored route and locus cannot be used unless both the starting point and the destination match. Therefore, for example, when searching for a route to return home from a remote place, in the area around the home that the operator is familiar with, a route that does not have the shortest required time or a route that is contrary to the operator's preference, i.e. A route that is inappropriate for the operator may be set.
本発明は、前記従来のナビゲーション装置の問題点を解決して、探索された経路と記憶されている経路との出発地又は目的地が一致する場合には、一致している前記出発地又は目的地を含む記憶されている経路の少なくとも一部を含む経路を案内する経路として設定するようにして、操作者にとって、より適切な経路を案内することができるナビゲーション装置を提供することを目的とする。 The present invention solves the problem of the conventional navigation device, and when the starting point or destination of the searched route and the stored route match, the starting point or destination that matches An object of the present invention is to provide a navigation device capable of guiding a route more appropriate for an operator by setting a route including at least a part of a stored route including the ground as a route to be guided. .
本発明のナビゲーション装置においては、過去の経路を出発地及び目的地とともに記憶経路として格納する経路記憶部と、入力された出発地から目的地までの経路を探索する経路探索部と、前記探索された経路と前記記憶経路とを比較する経路比較部と、該経路比較部の比較によって前記探索された経路と前記記憶経路との出発地が一致する場合、前記記憶経路の少なくとも前記出発地を含む一部を案内経路とする案内経路設定部とを有し、該案内経路設定部は、前記探索された経路と前記記憶経路とが同一のノードを複数含んでいる場合、前記出発地から最も遠距離に存在する同一のノードまでの記憶経路を案内経路とする。In the navigation device of the present invention, the route storage unit that stores the past route as a storage route together with the departure point and the destination, the route search unit that searches for the route from the input departure point to the destination, the search A route comparison unit that compares the stored route and the storage route, and if the departurepoint of the route searched by the comparison of the route comparison unit and the storage route match, includes at least the departurepoint of the storage routepossess a guidance route setting unit to guide routepart, the guide route setting portion, when said searched route and the storage path contains a plurality of the same node, farthest from the departure point A storage route to the same node existing at a distance is set as a guide route .
本発明の他のナビゲーション装置においては、過去の経路を出発地及び目的地とともに記憶経路として格納する経路記憶部と、入力された出発地から目的地までの経路を探索する経路探索部と、前記探索された経路と前記記憶経路とを比較する経路比較部と、該経路比較部の比較によって前記探索された経路と前記記憶経路との目的地が一致する場合、前記記憶経路の少なくとも前記目的地を含む一部を案内経路とする案内経路設定部とを有し、該案内経路設定部は、前記探索された経路と前記記憶経路とが同一のノードを複数含んでいる場合、前記目的地から最も遠距離に存在する同一のノードまでの記憶経路を案内経路とする。In another navigation device of the present invention,a route storage unit that stores a past route as a storage route together with a departure point and a destination, a route search unit that searches for a route from the input departure point to the destination, A route comparison unit that compares the searched route with the storage route, and when the destination of the searched route and the storage route matches by comparison of the route comparison unit, at least the destination of the storage route A guide route setting unit having a part including the guide route, and the guide route setting unit starts from the destination when the searched route and the storage route include a plurality of the same nodes. A storage route to the same node existing at the longest distance is set as a guide route .
本発明の更に他のナビゲーション装置においては、過去の経路を出発地及び目的地とともに記憶経路として格納する経路記憶部と、入力された出発地から目的地までの経路を探索する経路探索部と、前記探索された経路と前記記憶経路とを比較する経路比較部と、該経路比較部の比較によって前記探索された経路と前記記憶経路との出発地が一致する場合、前記記憶経路の少なくとも前記出発地を含む一部を案内経路とする案内経路設定部とを有し、該案内経路設定部は、前記探索された経路と記憶経路とが互いに隣接するノードを含んでいる場合、前記出発地から前記ノードまでの記憶経路を案内経路とする。In still another navigation device of the present invention,a route storage unit that stores a past route as a storage route together with a departure point and a destination, a route search unit that searches for a route from the input departure point to the destination, A route comparison unit that compares the searched route with the stored route, and a starting point of the stored route that matches the searched route by the comparison of the route comparison unit, at least the departure of the stored route and a guidance route setting unit to guide route a portion including the earth, the guidance route setting unit, if it contains a node where the the route searched and storage paths are adjacent to each other,or the departurepoint The storage route to the node is defined as a guide route.
本発明の更に他のナビゲーション装置においては、さらに、前記経路比較部は、前記探索された経路と出発地が一致する記憶経路があるか否かを判断し、ある場合には、前記探索された経路と記憶経路とが互いに隣接するノードを含んでいるか否かを判断する。In still another navigation device of the present invention, the route comparison unit further determines whether there is a storage route whose startingpoint matches the searched route, and if there is, the searched route It is determined whether the path and the storage path includeadjacent nodes.
本発明の更に他のナビゲーション装置においては、過去の経路を出発地及び目的地とともに記憶経路として格納する経路記憶部と、入力された出発地から目的地までの経路を探索する経路探索部と、前記探索された経路と前記記憶経路とを比較する経路比較部と、該経路比較部の比較によって前記探索された経路と前記記憶経路との目的地が一致する場合、前記記憶経路の少なくとも前記目的地を含む一部を案内経路とする案内経路設定部とを有し、該案内経路設定部は、前記探索された経路と記憶経路とが互いに隣接するノードを含んでいる場合、前記目的地から前記ノードまでの記憶経路を案内経路とする。In still another navigation device of the present invention,a route storage unit that stores a past route as a storage route together with a departure point and a destination, a route search unit that searches for a route from the input departure point to the destination, A route comparison unit that compares the searched route with the storage route, and a destination of the storage route that matches the searched route by comparison of the route comparison unit, at least the destination of the storage route A guide route setting unit having a part including the ground as a guide route, and the guide route setting unit starts from the destination when the searched route and the storage route include nodes adjacent to each other. A storage route to the node is a guide route .
本発明の更に他のナビゲーション装置においては、さらに、前記経路比較部は、前記探索された経路と目的地が一致する記憶経路があるか否かを判断し、ある場合には、前記探索された経路と記憶経路とが互いに隣接するノードを含んでいるか否かを判断する。In still another navigation device of the present invention, further, the route comparison unit determines whether there is a stored path the searched routeand their destinationsare the same, in some cases, be the search It is determined whether the determined path and the storage path include adjacent nodes.
本発明の更に他のナビゲーション装置においては、さらに、前記記憶経路は、車両が目的地に到着した後に操作者が記憶することを選択した経路である。 In still another navigation device of the present invention, the storage route is a route that the operator has selected to store after the vehicle arrives at the destination.
本発明の更に他のナビゲーション装置においては、さらに、所望の地点を登録地点として登録する地点登録部を有し、前記記憶経路は、前記登録地点を結ぶ走行経路のうち、所定以上の頻度で走行する経路である。 In still another navigation device of the present invention, the navigation device further includes a point registration unit for registering a desired point as a registered point, and the storage route travels at a predetermined frequency or more in a traveling route connecting the registered points. It is a route to do.
本発明によれば、探索された経路と記憶されている経路との出発地又は目的地が一致する場合には、一致している前記出発地又は目的地を含む記憶されている経路の少なくとも一部を含む経路を案内する経路として設定するので、操作者にとって、より適切な経路を案内することができる。 According to the present invention, when the starting point or the destination of the searched route and the stored route match, at least one of the stored routes including the matching starting point or destination. Since the route including the part is set as the route for guiding, it is possible to guide a more appropriate route for the operator.
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。 Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings.
図2は本発明の第1の実施の形態における車両用ナビゲーション装置の構成を示す図、図3は本発明の第1の実施の形態における車両用ナビゲーション装置の機能の観点からみた構成を示す図である。 FIG. 2 is a diagram showing the configuration of the vehicle navigation device according to the first embodiment of the present invention, and FIG. 3 is a diagram showing the configuration from the viewpoint of the function of the vehicle navigation device according to the first embodiment of the present invention. It is.
図2において、15は乗用車、トラック、バス、オートバイ等の車両に搭載されたナビゲーション装置としての車両用ナビゲーション装置であり、一種のコンピュータである。前記車両用ナビゲーション装置15は、現在位置を検出する現在位置検出処理部18、道路データ、探索データ等が記録された記録媒体としてのデータ記録部16、入力された情報に基づいて、ナビゲーション処理等の各種の演算処理を行うナビゲーション処理部17、入力部34、表示部35、音声入力部36、音声出力部37及び通信部38を有し、前記ナビゲーション処理部17に車速センサ41が接続される。 In FIG. 2,
そして、前記現在位置検出処理部18は、GPS(Global Positioning System)センサ21、地磁気センサ22、距離センサ23、ステアリングセンサ24、ビーコンセンサ25、ジャイロセンサ26、図示されない高度計等から成る。なお、前記GPSセンサ21、地磁気センサ22、距離センサ23、ステアリングセンサ24、ビーコンセンサ25、ジャイロセンサ26、高度計等の中のいくつかは、製造コスト等の観点から、適宜省略することもできる。 The current position
そして、前記GPSセンサ21は、人工衛星(GPS衛星)から送信された電波を受信することによって地球上における現在位置を検出し、前記地磁気センサ22は、地磁気を測定することによって車両が向いている方位を検出し、前記距離センサ23は、道路上の所定の位置間の距離等を検出する。前記距離センサ23としては、例えば、図示されない車輪の回転数を測定し、該回転数に基づいて距離を検出するもの、加速度を測定し、該加速度を二回積分して距離を検出するもの等を使用することができる。 The
また、前記ステアリングセンサ24は、舵(だ)角を検出し、前記ステアリングセンサ24としては、例えば、図示されないステアリングホイールの回転部に取り付けられた光学的な回転センサ、回転抵抗センサ、車輪に取り付けられた角度センサ等が使用される。 The
そして、前記ビーコンセンサ25は、道路に沿って配設されたビーコンからの位置情報を受信して現在位置を検出する。前記ジャイロセンサ26は、車両の回転角速度、すなわち、旋回角を検出し、前記ジャイロセンサ26としては、例えば、ガスレートジャイロ、振動ジャイロ等が使用される。そして、前記ジャイロセンサ26によって検出された旋回角を積分することによって、車両が向いている方位を検出することができる。 And the said
なお、前記GPSセンサ21及びビーコンセンサ25は、それぞれ、単独で現在位置を検出することができる。そして、距離センサ23によって検出された距離と、地磁気センサ22及びジャイロセンサ26によって検出された方位とを組み合わせることによって現在位置を検出することもできる。また、距離センサ23によって検出された距離と、ステアリングセンサ24によって検出された舵角とを組み合わせることによって現在位置を検出することもできる。 Each of the
そして、前記データ記録部16は、各種のデータファイルから成るデータベースを備え、経路を探索するための探索データの他、前記表示部35の画面に、探索された経路に沿って案内図を表示したり、交差点又は経路における特徴的な写真、コマ図等を表示したり、次の交差点までの距離、次の交差点における進行方向等を表示したり、他の案内情報を表示したりするために、地図データ、施設データ等の各種のデータを記録する。なお、前記データ記録部16には、所定の情報を音声出力部37によって音声出力するための各種のデータも記録される。 The
ここで、前記探索データには、交差点データ、ノードデータ、道路データ、交通規制データ及び経路表示データが含まれる。そして、前記交差点データには、データが格納されている交差点の数に加え、それぞれの交差点に関するデータが交差点データとして、識別するための番号が付与されて格納されている。さらに、それぞれの前記交差点データには、該当する交差点に接続する道路、すなわち、接続道路の数に加え、それぞれの接続道路を識別するための番号が付与されて格納されている。なお、前記交差点データには、交差点の種類、すなわち、交通信号灯器の設置されている交差点であるか又は交通信号灯器の設置されていない交差点であるかの区別が含まれていてもよい。また、前記ノードデータは、前記地図データファイルに記録された地図データにおける少なくとも道路の位置及び形状を構成するものであり、実際の道路の分岐点(交差点、T字路等を含む)、ノード、及び、各ノード間を連結するリンクを示すデータから成る。さらに、前記ノードは、少なくとも道路の屈曲点の位置を示す。 Here, the search data includes intersection data, node data, road data, traffic regulation data, and route display data. In the intersection data, in addition to the number of intersections in which data is stored, data relating to each intersection is assigned with a number for identification as intersection data. Further, each intersection data is stored with a number for identifying each connection road in addition to the number of roads connected to the corresponding intersection, that is, the number of connection roads. The intersection data may include the type of the intersection, that is, whether the intersection is a traffic signal lamp or an intersection where no traffic signal lamp is installed. Further, the node data constitutes at least the position and shape of the road in the map data recorded in the map data file, and includes actual branch points (including intersections, T-junctions, etc.), nodes, And data indicating a link connecting the nodes. Further, the node indicates at least the position of the inflection point of the road.
また、前記道路データには、データが格納されている道路の数に加え、それぞれの道路に関するデータが道路データとして、識別するための番号が付与されて格納されている。そして、それぞれの前記道路データには、道路種別、それぞれの道路の長さとしての距離、それぞれの道路を走行するのに要する時間としての旅行時間等が格納されている。さらに、前記道路種別には、国道、県道、主要地方道、一般道、高速道路等の行政道路属性が含まれる。 In addition to the number of roads in which the data is stored, the road data is stored with data relating to each road assigned with a number for identification as road data. Each road data stores a road type, a distance as a length of each road, a travel time as a time required for traveling on each road, and the like. Further, the road type includes administrative road attributes such as a national road, a prefectural road, a main local road, a general road, and an expressway.
なお、前記道路データには、道路自体について、幅員、勾(こう)配、カント、高度、バンク、路面の状態、中央分離帯があるか否か、道路の車線数、該車線数の減少する地点、幅員の狭くなる地点等のデータが含まれることが望ましい。そして、高速道路や幹線道路の場合、対向方向の車線のそれぞれが別個の道路データとして格納され、二条化道路として処理される。例えば、片側二車線以上の幹線道路の場合、二条化道路として処理され、上り方向の車線と下り方向の車線は、それぞれ、独立した道路として道路データに格納される。さらに、コーナについては、曲率半径、交差点、T字路、コーナの入口等のデータが含まれることが望ましい。また、踏切、高速道路出入口ランプウェイ、高速道路の料金所、降坂路、登坂路等の道路属性が含まれていてもよい。 In the road data, the width, gradient, cant, altitude, bank, road surface condition, whether or not there is a median strip, the number of road lanes, and the number of lanes are reduced. It is desirable to include data such as points and points where the width becomes narrower. In the case of an expressway or a main road, each of the lanes in the opposite direction is stored as separate road data and processed as a double road. For example, in the case of a trunk road with two or more lanes on one side, it is processed as a two-way road, and the lane in the upward direction and the lane in the downward direction are each stored in the road data as independent roads. Further, for corners, it is desirable to include data such as radii of curvature, intersections, T-junctions, and corner entrances. Road attributes such as railroad crossings, expressway entrance / exit rampways, expressway toll gates, downhill roads, and uphill roads may also be included.
また、前記ナビゲーション処理部17は、車両用ナビゲーション装置15の全体の制御を行うCPU、MPU等の演算手段としてのプロセッサ31、該プロセッサ31が各種の演算処理を行うに当たりワーキングメモリとして使用されるRAM(Random Access Memory)32、及び、制御プログラムの他、目的地までの経路の探索、経路中の走行案内、特定区間の決定、地点、施設等の検索等を行うための各種のプログラムが記録された記憶媒体としてのROM(Read Only Memory)33から成る。そして、前記ナビゲーション処理部17には、前記入力部34、表示部35、音声入力部36、音声出力部37及び通信部38が接続される。そして、経路の探索、経路中の走行案内、特定区間の決定、地点、施設等の検索等の各種処理を実行する。なお、前記音声入力部36、音声出力部37等は、製造コスト等の観点から、適宜省略することもできる。 The
また、前記ナビゲーションプログラムや、探索データ、道路データ等を記録したコンピュータ読み取り可能な記憶媒体は、半導体メモリだけでなく、磁気テープ、磁気ディスク、磁気ドラム、CD−R/W、MD、DVD−RAM、DVD−R/W、光ディスク、MO、ICカード、光カード、メモリカード等、あらゆる形態の記憶媒体を含むものである。 The computer-readable storage medium in which the navigation program, search data, road data, etc. are recorded is not only a semiconductor memory, but also a magnetic tape, magnetic disk, magnetic drum, CD-R / W, MD, DVD-RAM. , DVD-R / W, optical disc, MO, IC card, optical card, memory card, and other forms of storage media.
なお、前記データ記録部16及びROM33は、図示されない磁気コア、半導体メモリ等によって構成される。また、前記データ記録部16及びROM33として、磁気テープ、磁気ディスク、磁気ドラム、CD−R/W、MD、DVD−RAM、DVD−R/W、光ディスク、MO、ICカード、光カード、メモリカード等の各種の記憶媒体を使用することもできる。該記憶媒体は、車両用ナビゲーション装置15にあらかじめ据え付けられたものであってもよく、ユーザによって適宜交換可能なものであってもよい。 The
本実施の形態においては、前記ROM33に各種のプログラムが記録され、前記データ記録部16に各種のデータが記録されるようになっているが、プログラム及びデータを同じように外部記憶媒体に記録することもできる。この場合、例えば、前記ナビゲーション処理部17に図示されないフラッシュメモリ等の記憶媒体を配設し、前記外部記憶媒体から前記プログラム及びデータを読み出して前記記憶媒体に書き込むこともできる。したがって、外部記憶媒体を交換することによって前記プログラム及びデータを更新することができる。このように、各種の記憶媒体に記録されたプログラムを起動し、データに基づいて各種の処理を行うことができる。なお、前記外部記憶媒体は、磁気テープ、磁気ディスク、磁気ドラム、CD−R/W、MD、DVD−RAM、DVD−R/W、光ディスク、MO、ICカード、光カード、メモリカード等いかなる種類のものであってもよい。 In the present embodiment, various programs are recorded in the
さらに、前記通信部38は、FM送信装置、電話回線網、インターネット、携帯電話回線網、無線LAN(Local Area Network)等との間で各種のデータの送受信を行うためのものであり、例えば、図示されない情報センサ等によって受信した渋滞等の道路情報、交通事故情報、GPSセンサ21の検出誤差を検出するD−GPS情報等の各種のデータを受信する。また、本発明の機能を実現するためのプログラム、車両用ナビゲーション装置15を作動させるためのその他のプログラム、データ等を、情報センタ(インターネットサーバ、ナビゲーション用サーバ等)から複数の基地局(インターネットのプロバイダ端末、前記通信部38と電話回線網、通信回線網等を介して接続された通信局等)に送信し、さらに各基地局から通信部38に送信することもできる。このようなシステムを使用する場合、各基地局から送信された前記プログラム及びデータの少なくとも一部が受信されると、前記プロセッサ31は、読み書き可能なメモリ、例えば、RAM32、フラッシュメモリ、ハードディスク等の記憶媒体にダウンロードし、前記プログラムを起動し、データに基づいて各種の処理を行うことができる。 Further, the
この場合、例えば、プログラム及びデータを異なる記憶媒体に記録したり、同じ記憶媒体に記録したりすることもできる。 In this case, for example, the program and data can be recorded on different storage media, or can be recorded on the same storage medium.
また、家庭用のパーソナルコンピュータを使用し、前記情報センタから送信されたプログラム、データ等をパーソナルコンピュータに対して脱着自在なメモリカード、CD−R等の記憶媒体にダウンロードし、前記プログラムを起動し、データに基づいて各種の処理を行うこともできる。 Also, using a personal computer for home use, download the program, data, etc. transmitted from the information center to a storage medium such as a memory card or CD-R that can be attached to and detached from the personal computer, and start the program. Various processes can be performed based on the data.
そして、前記入力部34は、走行開始時の位置を修正したり、目的地を入力したりするためのものであり、前記車両用ナビゲーション装置15の本体に配設された操作キー、押しボタン、ジョグダイヤル、十字キー等から成るものであるが、リモートコントローラであってもよい。なお、表示部35がタッチパネルである場合には、前記表示部35の画面に表示された操作キー、操作メニュー等の操作スイッチから成るものであることが望ましい。この場合、通常のタッチパネルのように前記操作スイッチを押す、すなわち、タッチすることによって、入力を行うことができる。 The
そして、前記表示部35の画面には、操作案内、操作メニュー、操作キーの案内、現在位置から目的地までの経路、該経路に沿った案内情報等が表示される。前記表示部35としては、CRT、液晶ディスプレイ、LED(Light Emitting Diode)ディスプレイ、プラズマディスプレイ、フロントガラスにホログラムを投影するホログラム装置等を使用することができる。 The screen of the
また、音声入力部36は、図示されない音声認識用のマイクロホン、音声認識装置等を備え、音声によって必要な情報を入力することができる。これにより、操作者は、入力部34の操作スイッチ等を操作することなく、音声によって目的地等を入力したり、経路探索等を行わせることができる。さらに、音声出力部37は、図示されない音声合成装置及びスピーカを備え、音声情報、例えば、音声合成装置によって合成された音声から成る案内情報、変速情報等をスピーカから出力し、操作者に知らせる。なお、音声合成装置によって合成された音声の他に、各種の音、あらかじめテープ、メモリ等に録音された各種の案内情報をスピーカから出力することもできる。 The
本実施の形態において、図3に示されるように、車両用ナビゲーション装置15は、機能の観点から、入力された出発地から目的地までの経路を探索する経路探索部42、過去の経路を出発地及び目的地とともに記憶経路として格納する経路記憶部43、探索された経路と前記記憶経路とを比較する経路比較部44、該経路比較部44の比較結果に基づいて案内経路を設定する案内経路設定部45、及び、所望の地点を登録地点として登録する地点登録部46を有する。 In the present embodiment, as shown in FIG. 3, the
ここで、前記経路探索部42は、通常のナビゲーション装置と同様に、出発地から目的地までの経路を探索する。なお、出発地は、通常、車両の現在位置が自動的に入力されるが、操作者が任意の地点を出発地として入力することもできる。そして、前記経路探索部42は、データ記録部16に格納されたデータベースにアクセスして、出発地から目的地までの距離が最短となるように経路を探索したり、所要時間が最短となるように経路を探索するが、VICS(R)(道路交通情報通信システム:Vehicle Information & Communication System)等の道路交通情報を参照して経路を探索してもよい。なお、該経路が案内の対象としての経路、すなわち、案内経路として設定されると、前記表示部35の画面に前記案内経路や該案内経路に沿った案内情報が表示されたり、音声出力部37から案内情報が音声出力されることによって、経路案内が行われる。 Here, the
また、前記経路記憶部43は、経路案内に従って車両が走行した出発地から目的地までの経路であり、車両が目的地に到着した後に、操作者が記憶すべきものとして選択した経路を、出発地及び目的地とともに記憶経路として前記ルートバンクに格納する。ここで、該ルートバンクは、データ記録部16、RAM32等の記憶手段内に設定された記憶経路を格納するための記憶領域である。なお、前記経路記憶部42は、経路案内が行われた経路以外の経路を記憶経路とすることもできる。例えば、通勤経路、通学経路等のように日常的に走行する経路を、車両の走行軌跡に基づいて、記憶経路とすることができる。この場合、自宅、勤務地、学校等をあらかじめ登録地点として操作者が選択して地点登録部46に登録しておくことによって、前記登録地点を結ぶ車両の走行軌跡を日常的に走行する経路と判断することができる。また、例えば、一週間に一度以上等のように所定以上の頻度で走行する経路を、車両の走行軌跡に基づいて、記憶経路とすることができる。この場合、記憶されている過去の車両の走行軌跡の中で重複する頻度が所定以上のものを、所定以上の頻度で走行する経路と判断することができる。 The
さらに、前記経路比較部44は、探索された経路と出発地又は目的地と一致する記憶経路があるか否かを判断し、ある場合には、前記探索された経路と記憶経路とが同一のノードを含んでいるか否かを判断する。すなわち、前記経路比較部44は、前記経路探索部42によって探索された経路とルートバンクに格納されている記憶経路とを比較し、探索された経路と出発地又は目的地が一致する記憶経路があるか否かを判断する。そして、出発地又は目的地のいずれかが一致する記憶経路がある場合、前記経路比較部44は、両方の経路が同一のノードを含んでいるか否か、すなわち、両方の経路が交差する箇所があるか否かを判断する。そして、両方の経路が同一のノードを含んでいる場合、すなわち、両方の経路が交差する箇所がある場合、前記経路比較部44は、さらに、出発地又は目的地のいずれが一致するのかを判断する。 Further, the
さらに、前記案内経路設定部45は、探索された経路と記憶経路とが同一のノードを含んでいる場合、出発地又は目的地から前記ノードまでの記憶経路を案内経路とする。すなわち、前記案内経路設定部45は、前記探索された経路と前記記憶経路との出発地又は目的地が一致する場合、前記記憶経路の少なくとも前記出発地又は目的地を含む一部を案内経路とする、すなわち、前記経路比較部44が探索された経路と出発地及び目的地が一致する記憶経路とがあると判断した場合、該記憶経路を案内経路として設定する。これにより、出発地から目的地までの案内経路として、探索された経路よりも操作者にとって、より適切な経路である記憶経路を設定することができる。 Further, when the searched route and the stored route include the same node, the guide
また、探索された経路と出発地が一致する記憶経路があり、両方の経路が同一のノードを含んでいる場合、前記案内経路設定部45は、出発地から同一のノードまでは記憶経路を案内経路として設定し、同一のノードから目的地までは探索された経路を案内経路として設定する。これにより、出発地周辺のエリアにおいては、出発地からの案内経路として、探索された経路よりも操作者にとって、より適切な経路である記憶経路を設定することができる。 In addition, when there is a storage route in which the searched route and the departure point coincide, and both the routes include the same node, the guide
一方、探索された経路と目的地が一致する記憶経路があり、両方の経路が同一のノードを含んでいる場合、前記案内経路設定部45は、同一のノードから目的地までは記憶経路を案内経路として設定し、出発地から同一のノードまでは探索された経路を案内経路として設定する。これにより、目的地周辺のエリアにおいては、目的地までの案内経路として、探索された経路よりも操作者にとって、より適切な経路である記憶経路を設定することができる。 On the other hand, if there is a storage route whose destination matches the searched route, and both routes include the same node, the guide
なお、探索された経路と出発地及び目的地がともに一致する記憶経路がある場合、前記案内経路設定部45は、記憶経路を案内経路として設定する。 When there is a storage route in which the searched route matches the departure point and the destination, the guide
次に、前記構成の車両用ナビゲーション装置15の動作について説明する。まず、経路を記憶経路としてルートバンクに格納する動作について説明する。 Next, the operation of the
図4は本発明の第1の実施の形態における車両用ナビゲーション装置の記憶経路を示す図、図5は本発明の第1の実施の形態における車両用ナビゲーション装置の経路を記憶経路としてルートバンクに格納する動作を示すフローチャートである。 FIG. 4 is a diagram showing a storage path of the vehicle navigation apparatus according to the first embodiment of the present invention, and FIG. 5 is a route bank using the path of the vehicle navigation apparatus according to the first embodiment of the present invention as a storage path. It is a flowchart which shows the operation | movement to store.
まず、車両の運転者等の操作者は、入力部34を操作して、図4に示されるような目的地52を設定し、該目的地52までの経路53aを記録するように入力する。なお、図4は表示部35の表示画面に表示された状態を示している。すると、経路記憶部43は、現在位置検出処理部18が検出した車両の現在位置を出発地51とし、該出発地51と前記目的地52とを記録する。この場合、前記出発地51及び目的地52の位置座標が記録される。そして、車両が走行を開始すると、前記経路記憶部43は、所要時間の測定及び走行した経路53aの記録を開始する。ここで、該経路53aは、車両の走行軌跡に基づいて記録されるので、実際の走行経路が記録される。 First, an operator such as a driver of the vehicle operates the
そして、車両が目的地52に到着すると、前記経路記憶部43は、所要時間の測定及び経路53aの記録を終了し、今回走行した経路53aを記憶経路としてルートバンクに格納するか否かを操作者に選択させる。この場合、表示部35の表示画面上に、今回走行した経路53aを記憶するか否かの質問と、「記憶する」及び「記憶しない」を選択するための選択手段が表示される。この場合、操作者の選択を容易にするために、表示部35の表示画面上に、図4に示されるように、走行した経路53aを表示してもよい。さらに、測定された所要時間等を表示することもできる。そして、操作者は、入力部34の操作キー等を操作して「記憶する」又は「記憶しない」を選択する。 When the vehicle arrives at the
ここで、操作者が「記憶する」を選択した場合、前記経路記憶部43は、出発地51、目的地52、所要時間とともに、今回走行した経路53aを記憶経路53としてルートバンクに格納する。また、操作者が「記憶しない」を選択した場合、前記経路記憶部43は、出発地51、目的地52、所要時間及び今回走行した経路53aの記録を消去する。 Here, when the operator selects “store”, the
なお、前記経路記憶部43は、経路探索部42が探索した経路を記憶経路53としてルートバンクに格納することができる。さらに、車両が日常的に走行する経路や所定以上の頻度で走行する経路を記憶経路53としてルートバンクに格納することもできる。 The
次に、フローチャートについて説明する。
ステップS1 目的地52を設定する。
ステップS2 出発地51と目的地52とを記録する。
ステップS3 経路記憶部43は、所要時間の測定及び経路53aの記録を開始する。
ステップS4 車両が目的地52に到着したか否かを判断する。車両が目的地52に到着した場合はステップS5に進み、車両が目的地52に到着しない場合は待機する。
ステップS5 経路記憶部43は、所要時間の測定及び経路53aの記録を終了する。
ステップS6 今回走行した経路53aを記憶するか否かを判断する。今回走行した経路53aを記憶する場合はステップS7に進み、今回走行した経路53aを記憶しない場合はステップS8に進む。
ステップS7 出発地51、目的地52、所要時間及び今回走行した経路53aを記憶経路53としてルートバンクに記憶し、処理を終了する。
ステップS8 出発地51、目的地52、所要時間及び今回走行した経路53aの記録を消去し、処理を終了する。Next, a flowchart will be described.
Step S1: The
Step S2 The
Step S3 The
Step S4: It is determined whether or not the vehicle has arrived at the
Step S5 The
Step S6: It is determined whether or not the
Step S7 The
Step S8: The record of the
次に、出発地又は目的地が、記憶経路の出発地又は目的地と一致している場合に、案内経路として記憶経路を設定する場合の動作について説明する。 Next, an operation when a storage route is set as a guide route when the departure point or destination coincides with the departure point or destination of the storage route will be described.
図1は本発明の第1の実施の形態における車両用ナビゲーション装置の目的地までの記憶経路を案内経路として設定する動作を示す図、図6は本発明の第1の実施の形態における車両用ナビゲーション装置が探索した経路を示す図、図7は本発明の第1の実施の形態における車両用ナビゲーション装置の目的地までの記憶経路を案内経路として設定する動作を示すフローチャートである。 FIG. 1 is a diagram showing an operation of setting a storage route to a destination of a vehicle navigation apparatus according to the first embodiment of the present invention as a guide route, and FIG. 6 is for a vehicle according to the first embodiment of the present invention. The figure which shows the path | route which the navigation apparatus searched, FIG. 7 is a flowchart which shows the operation | movement which sets the memory | storage path | route to the destination of the navigation apparatus for vehicles in the 1st Embodiment of this invention as a guidance path | route.
まず、車両の運転者等の操作者は、入力部34を操作して、図6に示されるように、目的地55を設定し、該目的地55までの経路56を探索するように入力する。なお、図6は表示部35の表示画面に表示された状態を示している。すると、経路探索部42は、現在位置検出処理部18が検出した車両の現在位置を出発地54とし、該出発地54から設定された目的地55までの経路56を探索する。 First, an operator such as a vehicle driver operates the
続いて、経路比較部44は、前記経路探索部42によって探索された経路56とルートバンクに格納されている記憶経路53とを比較し、前記探索された経路56の出発地54又は目的地55と出発地51又は目的地52とが一致する記憶経路53があるか否かを判断する。ここで、前記経路比較部44が探索された経路56の出発地54及び目的地55のいずれもが出発地51及び目的地52と一致する記憶経路53があると判断した場合、案内経路設定部45は、前記記憶経路53を後述される図1(b)に示されるような案内経路58として設定する。これにより、探索された経路56よりも操作者にとって、より適切な経路である記憶経路が出発地51、54から目的地52、55までの案内経路58として設定される。そして、該案内経路58が表示部35の表示画面に表示され、経路案内が行われる。 Subsequently, the
また、前記経路比較部44が、探索された経路56の出発地54又は目的地55のいずれかでも出発地51及び目的地52と一致する記憶経路53がないと判断した場合、案内経路設定部45は前記探索された経路56を案内経路58として設定する。そして、該案内経路58が表示部35の表示画面に表示され、経路案内が行われる。 Further, when the
そして、探索された経路56の出発地54又は目的地55のいずれかが出発地51又は目的地52と一致する記憶経路53があると判断した場合、前記経路比較部44は、さらに、前記記憶経路53と前記探索された経路56とが、後述される図1(a)に示されるノード57のような同一のノード57を含んでいるか否か、すなわち、前記記憶経路53と前記探索された経路56とが交差する箇所があるか否かを判断する。ここで、前記経路比較部44が前記記憶経路53と前記探索された経路56とが同一のノード57を含んでおらず、交差する箇所がないと判断した場合、案内経路設定部45は前記探索された経路56を案内経路58として設定する。そして、該案内経路58が表示部35の表示画面に表示され、経路案内が行われる。 When it is determined that there is a
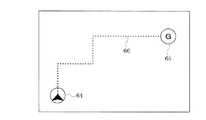
また、前記記憶経路53と前記探索された経路56とが同一のノードを含んでいて、交差する箇所があると判断した場合、前記経路比較部44は、さらに、出発地51、54が一致するのか、又は、目的地52、55が一致するのかを判断する。そして、図1(a)に示されるように、前記経路比較部44が記憶経路53の目的地52と、探索された経路56の目的地55とが一致すると判断した場合、案内経路設定部45は、図1(b)に示されるように、同一のノード57から目的地52、55までは記憶経路53を案内経路58として設定し、出発地54から前記ノード57までは探索された経路56を案内経路58として設定する。これにより、出発地54からノード57までは探索された経路56が表示部35の表示画面に表示されて経路案内が行われ、ノード57から目的地52、55までは、操作者にとって、より適切な経路である記憶経路53が表示部35の表示画面に表示されて経路案内が行われる。 Further, when it is determined that the stored
なお、同一のノード57が複数存在する場合、例えば、図1(a)に示されるように、ノード57の他にノード57−2も同一のノードである場合、案内経路設定部45は、同一の目的地52、55から記憶経路53に沿って最も遠距離に存在するノード57を選択し、該ノード57から目的地52、55までは記憶経路53を案内経路58として設定する。 When there are a plurality of the same nodes 57, for example, as shown in FIG. 1A, when the node 57-2 is the same node as the node 57, the guide
一方、前記経路比較部44が出発地51、54が一致すると判断した場合、案内経路設定部45は、出発地51、54から同一のノード57までは記憶経路53を案内経路58として設定し、前記ノード57から目的地55までは探索された経路56を案内経路58として設定する。これにより、出発地51、54からノード57までは作者にとって、より適切な経路である記憶経路53が表示部35の表示画面に表示されて経路案内が行われ、ノード57から目的地55までは探索された経路56が表示部35の表示画面に表示されて経路案内が行われる。 On the other hand, when the
なお、同一のノード57が複数存在する場合、案内経路設定部45は、同一の出発地51、54から記憶経路53に沿って最も遠距離に存在するノード57を選択し、出発地51、54から同一のノード57までは記憶経路53を案内経路58として設定する。 When there are a plurality of the same nodes 57, the guide
次に、フローチャートについて説明する。
ステップS11 目的地55を設定する。
ステップS12 目的地55までの経路56を探索する。
ステップS13 経路56の出発地54又は目的地55と出発地51又は目的地52とが一致する記憶経路53があるか否かを判断する。経路56の出発地54又は目的地55のいずれかが出発地51又は目的地52と一致する記憶経路53があると判断した場合はステップS14に進み、経路56の出発地54又は目的地55のいずれかでも出発地51又は目的地52と一致する記憶経路53がないと判断した場合はステップS17に進み、経路56の出発地54及び目的地55のいずれもが出発地51及び目的地52と一致する記憶経路53があると判断した場合はステップS18に進む。
ステップS14 記憶経路53と探索された経路56とが交差するノード57があるか否かを判断する。記憶経路53と探索された経路56とが交差するノード57がある場合はステップS15に進み、記憶経路53と探索された経路56とが交差するノード57がない場合はステップS17に進む。
ステップS15 出発地51、54が一致するのか、又は、目的地52、55が一致するのかを判断する。出発地51、54が一致する場合はステップS19に進み、目的地52、55が一致する場合はステップS16に進む。
ステップS16 交差するノード57から目的地52、55までは記憶経路53を使用する。
ステップS17 案内経路58を表示し、処理を終了する。
ステップS18 記憶経路53を使用する。
ステップS19 出発地51、54から交差するノード57までは探索された経路56を使用する。Next, a flowchart will be described.
Step S11: The
Step S12: A
Step S13: It is determined whether or not there is a
Step S14: It is determined whether or not there is a node 57 at which the
Step S15: It is determined whether the starting
Step S16 The
Step S17: The guide route 58 is displayed and the process is terminated.
Step S18: The
Step S19 The searched
このように、本実施の形態においては、経路比較部44が探索された経路56の出発地54又は目的地55のいずれかが出発地51及び目的地52と一致する記憶経路53があると判断し、かつ、両方の経路53、56が同一のノード57を含んでいると判断した場合、一致する出発地51、54から同一のノード57まで、又は、同一のノード57から一致する目的地52、55までは、記憶経路53を案内経路58として設定するようになっている。すなわち、探索された経路56の出発地54又は目的地55のいずれかが、記憶経路53の出発地51又は目的地52と一致している場合には、一致している出発地51、54又は目的地52、55を含む記憶経路53の少なくとも一部を利用して案内経路58を設定するようになっている。そのため、操作者にとって、より適切な経路を案内経路58として設定することができる。 As described above, in the present embodiment, the
これにより、例えば、遠隔地から自宅に帰宅する経路を探索した場合、目的地としての自宅周辺のエリアにおいて、所要時間が最短となる経路や操作者の好みに合致する経路、すなわち、操作者にとって適切な経路としてあらかじめ選択されてルートバンクに格納された記憶経路53を通るように経路案内が行われる。また、例えば、自宅から遠隔地に出向く経路を探索した場合、出発地としての自宅周辺のエリアにおいて、所要時間が最短となる経路や操作者の好みに合致する経路、すなわち、操作者にとって適切な経路としてあらかじめ選択されてルートバンクに格納された記憶経路53を通るように経路案内が行われる。 Thus, for example, when searching for a route to return home from a remote location, in the area around the home as the destination, the route that takes the shortest time or the route that matches the operator's preference, that is, for the operator The route guidance is performed so as to pass through the
したがって、実際の交通量、信号待ちの時間、道幅、見通しの善し悪し、歩行者の多少、走り易さ等の状況を操作者が熟知しているエリアにおいて、操作者に適した経路を通るように案内経路58が設定されるので、操作者は、車両用ナビゲーション装置15の経路案内を信頼し、車両用ナビゲーション装置15を十分活用することができる。 Therefore, in areas where the operator is familiar with the actual traffic volume, waiting time for traffic lights, road width, good or bad visibility, pedestrians, ease of driving, etc., the route should be suitable for the operator. Since the guide route 58 is set, the operator can rely on the route guidance of the
次に、本発明の第2の実施の形態について説明する。なお、前記第1の実施の形態と同じ構造を有するものについては、同じ符号を付与することによってその説明を省略する。また、前記第1の実施の形態と同じ動作及び同じ効果についても、その説明を省略する。 Next, a second embodiment of the present invention will be described. In addition, about what has the same structure as the said 1st Embodiment, the description is abbreviate | omitted by providing the same code | symbol. The description of the same operation and the same effect as those of the first embodiment is also omitted.
図8は本発明の第2の実施の形態における車両用ナビゲーション装置の記憶経路を示す図、図9は本発明の第2の実施の形態における車両用ナビゲーション装置が探索した経路を示す図、図10は本発明の第2の実施の形態における車両用ナビゲーション装置の目的地までの記憶経路を案内経路として設定する動作を示す図、図11は本発明の第2の実施の形態における車両用ナビゲーション装置の目的地までの記憶経路を案内経路として設定する動作を示すフローチャートである。 FIG. 8 is a diagram showing a storage path of the vehicle navigation apparatus according to the second embodiment of the present invention, and FIG. 9 is a diagram showing a path searched by the vehicle navigation apparatus according to the second embodiment of the present invention. 10 is a diagram showing an operation of setting a storage route to a destination of the vehicle navigation apparatus according to the second embodiment of the present invention as a guide route, and FIG. 11 is a vehicle navigation according to the second embodiment of the present invention. It is a flowchart which shows the operation | movement which sets the memory | storage path | route to the destination of an apparatus as a guidance path | route.
本実施の形態において、案内経路設定部45は、探索された経路と記憶経路とが互いに近接するノードを含んでいる場合、出発地又は目的地から前記ノードまでの記憶経路を案内経路とする。また、経路比較部44は、前記探索された経路と出発地又は目的地と一致する記憶経路とがあるか否かを判断し、ある場合には、前記探索された経路と記憶経路とが互いに近接するノードを含んでいるか否かを判断する。すなわち、本実施の形態においては、探索された経路の出発地又は目的地のいずれかと出発地又は目的地のいずれかとが一致する記憶経路がある場合、探索された経路と記憶経路とが同一のノードを含んでいなくても、互いに隣接するノードを含んでいるのであれば、記憶経路の一部を案内経路として設定するようになっている。なお、図8に示されるような出発地61から目的地62までの記憶経路63が、あらかじめルートバンクに格納されているものとする。図8は表示部35の表示画面に表示された状態を示している。 In the present embodiment, when the searched route and the stored route include nodes close to each other, the guide
まず、車両の運転者等の操作者は、入力部34を操作して、図9に示されるように、目的地65を設定し、該目的地65までの経路66を探索するように入力する。なお、図9は表示部35の表示画面に表示された状態を示している。すると、経路探索部42は、現在位置検出処理部18が検出した車両の現在位置を出発地64とし、該出発地64から設定された目的地65までの経路66を探索する。 First, an operator such as a vehicle driver operates the
続いて、経路比較部44は、前記経路探索部42によって探索された経路66とルートバンクに格納されている記憶経路63とを比較し、前記探索された経路66の出発地64又は目的地65と出発地61又は目的地62とが一致する記憶経路63があるか否かを判断する。ここで、前記経路比較部44が探索された経路66の出発地64及び目的地65のいずれもが出発地61及び目的地62と一致する記憶経路63があると判断した場合、案内経路設定部45は、前記記憶経路63を後述される図10(b)に示されるような案内経路68として設定する。これにより、探索された経路66よりも操作者にとって、より適切な経路である記憶経路63が出発地61、64から目的地62、65までの案内経路68として設定される。そして、該案内経路68が表示部35の表示画面に表示され、経路案内が行われる。 Subsequently, the
また、前記経路比較部44が、探索された経路66の出発地64又は目的地65のいずれかでも出発地61及び目的地62と一致する記憶経路63がないと判断した場合、案内経路設定部45は前記探索された経路66を案内経路68として設定する。そして、該案内経路68が表示部35の表示画面に表示され、経路案内が行われる。 Further, when the
そして、探索された経路66の出発地64又は目的地65のいずれかが出発地61又は目的地62と一致する記憶経路63があると判断した場合、前記経路比較部44は、さらに、前記記憶経路63と前記探索された経路66とが、後述される図10(a)に示されるような互いに隣接するノード67a及びノード67bを、それぞれ、含んでいるか否か、すなわち、前記記憶経路63と前記探索された経路66とが隣接する箇所があるか否かを判断する。When it is determined that there is a
ここで、互いに隣接するノードとは、一つのリンクの両端に、それぞれ、存在するノードである。そして、ノードは、少なくとも道路上の交差点や分岐点に対応する位置に設定され、交差点や分岐点に対応するノードには交差点に接続される道路の数に対応する数のリンクが接続されている。例えば、交差点が十字路であれば、交差点に接続される道路と同様に四本のリンクが接続されている。そのため、探索された経路66に交差点や分岐点が存在する場合、該交差点や分岐点に対応するノードには、前記経路66に含まれるリンク以外のリンクが接続されている。
Here, the nodes adjacent to each other, at both ends of one link, anode, respectively, are present. The node is set at a position corresponding to at least an intersection or a branch point on the road, and a number of links corresponding to the number of roads connected to the intersection are connected to the node corresponding to the intersection or the branch point. . For example, if the intersection is a crossroad, four links are connected as in the road connected to the intersection. Therefore, when an intersection or a branch point exists in the searched
そこで、前記経路比較部44は、探索された経路66に含まれるすべてのノードについて、前記経路66に含まれるリンク以外のリンクが接続されているか否かを判断し、存在する場合には該リンクの他端のノードが記憶経路63に存在するか否かを判断する。そして、存在する場合には前記探索された経路66と前記記憶経路63とが、互いに隣接するノード67a及びノード67bをそれぞれ含んでいるものとする。 Therefore, the
ここで、前記経路比較部44が前記記憶経路63と前記探索された経路66とが互いに隣接するノード67a及びノード67bを含んでおらず、隣接する箇所がないと判断した場合、案内経路設定部45は前記探索された経路66を案内経路68として設定する。そして、該案内経路68が表示部35の表示画面に表示され、経路案内が行われる。 Here, when the
また、前記記憶経路63と前記探索された経路66とが互いに隣接するノード67a及びノード67bをそれぞれ含んでいて、近接する箇所があると判断した場合、前記経路比較部44は、さらに、出発地61、64が一致するのか又は目的地62、65が一致するのかを判断する。そして、図10(a)に示されるように、前記経路比較部44が目的地62、65が一致すると判断した場合、案内経路設定部45は、図10(b)に示されるように、ノード67bから目的地62、65までは記憶経路63を案内経路68として設定し、ノード67aからノード67bまではノード67aとノード67bとを結ぶリンク69に対応する道路を案内経路68として設定し、出発地64からノード67aまでは探索された経路66を案内経路68として設定する。これにより、出発地64から同一のノード67aまでは探索された経路66が表示部35の表示画面に表示されて経路案内が行われ、ノード67bから目的地62、65までは、操作者にとって、より適切な経路である記憶経路63が表示部35の表示画面に表示されて経路案内が行われる。 In addition, when it is determined that the
なお、互いに隣接するノード67a及びノード67bが複数組存在する場合、案内経路設定部45は、同一の目的地62、65から記憶経路63に沿って最も遠距離に存在するノード67bを含む組を選択し、該ノード67bから目的地62、65までは記憶経路63を案内経路68として設定する。 In addition, when there are a plurality of sets of
一方、前記経路比較部44が出発地61、64が一致すると判断した場合、案内経路設定部45は、出発地61、64からノード67aまでは記憶経路63を案内経路68として設定し、ノード67aからノード67bまではノード67aとノード67bとを結ぶリンク69に対応する道路を案内経路68として設定し、ノード67bから目的地65までは探索された経路66を案内経路68として設定する。これにより、出発地61、64から同一のノード67aまでは作者にとって、より適切な経路である記憶経路63が表示部35の表示画面に表示されて経路案内が行われ、ノード67bから目的地65までは探索された経路66が表示部35の表示画面に表示されて経路案内が行われる。 On the other hand, when the
なお、互いに隣接するノード67a及びノード67bが複数組存在する場合、案内経路設定部45は、同一の出発地61、64から記憶経路63に沿って最も遠距離に存在するノード67bを含む組を選択し、出発地61、64からノード67bまでは記憶経路63を案内経路68として設定する。 In addition, when there are a plurality of sets of
次に、フローチャートについて説明する。
ステップS21 目的地65を設定する。
ステップS22 目的地65までの経路66を探索する。
ステップS23 経路66の出発地64又は目的地65と出発地61又は目的地62とが一致する記憶経路63があるか否かを判断する。経路66の出発地64又は目的地65のいずれかが出発地61又は目的地62と一致する記憶経路63があると判断した場合はステップS24に進み、経路66の出発地64又は目的地65のいずれかでも出発地61又は目的地62と一致する記憶経路63がないと判断した場合はステップS27に進み、経路66の出発地64及び目的地65のいずれもが出発地61及び目的地62と一致する記憶経路63があると判断した場合はステップS28に進む。
ステップS24 記憶経路63と探索された経路66とが互いに隣接するノードを、それぞれ、含んでいるか否かを判断する。記憶経路63と探索された経路66とが互いに隣接するノードを、それぞれ、含んでいる場合はステップS25に進み、記憶経路63と探索された経路66とが互いに隣接するノードを、それぞれ、含んでいない場合はステップS27に進む。
ステップS25 出発地61、64が一致するのか、又は、目的地62、65が一致するのかを判断する。出発地61、64が一致する場合はステップS29に進み、目的地62、65が一致する場合はステップS26に進む。
ステップS26 出発地64からノード67aまでは探索された経路66、ノード67aからノード67bまではリンク69、ノード67bから目的地62、65までは記憶経路63を使用する。
ステップS27 案内経路68を表示し、処理を終了する。
ステップS28 記憶経路63を使用する。
ステップS29 出発地61、64からノード67aまでは記憶経路63、ノード67aからノード67bまではリンク69、ノード67bから目的地65までは探索された経路66を使用する。Next, a flowchart will be described.
Step S21: The
Step S22: A
Step S23: It is determined whether or not there is a
Step S24: It is determined whether or not the
Step S25: It is determined whether the starting
Step S26 The searched
Step S27: The
Step S28: The
Step S29 The
このように、本実施の形態においては、経路比較部44が探索された経路66の出発地64又は目的地65のいずれかが出発地61及び目的地62と一致する記憶経路63があると判断し、かつ、前記記憶経路63と前記探索された経路66とが互いに隣接するノード67a及びノード67bを、それぞれ、含んでいると判断した場合、一致する出発地61、64からノード67bまで、又は、ノード67bから一致する目的地62、65までは、記憶経路63を案内経路58として設定するようになっている。すなわち、探索された経路66の出発地64又は目的地65のいずれかが、記憶経路63の出発地61又は目的地62と一致している場合には、一致している出発地61、64又は目的地62、65を含む記憶経路63の少なくとも一部を利用して案内経路68を設定するようになっている。そのため、操作者にとって、より適切な経路を案内経路68として設定することができる。 Thus, in the present embodiment, the
この場合、前記第1の実施の形態のように、記憶経路63と探索された経路66とが交差していなくても、近接する箇所が存在する場合には、一致している出発地61、64又は目的地62、65を含む記憶経路63の少なくとも一部を利用して案内経路68を設定することができる。したがって、操作者にとって適切な経路としてあらかじめ選択されてルートバンクに格納された記憶経路63を通るように経路案内が行われる可能性が高くなり、操作者は、車両用ナビゲーション装置15の経路案内をより信頼し、車両用ナビゲーション装置15をより多く活用することができる。 In this case, as in the first embodiment, even if the
なお、本発明の第1及び第2の実施の形態においては、車両用ナビゲーション装置15がデータ記録部16にデータベースを格納し、該データベースにアクセスして、案内経路58、68を設定する場合について説明したが、情報センタ等に配設されたサーバにデータベースを格納し、無線通信等の通信を行うことによって、車両用ナビゲーション装置15が前記サーバにアクセスして、該サーバが設定した案内経路58、68を取得するようにしてもよい。また、経路の探索だけを前記サーバに行わせ、探索された経路56、66を前記サーバから取得し、データ記録部16に格納されている記憶経路53、63と比較して、車両用ナビゲーション装置15が案内経路58、68を設定するようにしてもよい。 In the first and second embodiments of the present invention, the
また、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。 The present invention is not limited to the above-described embodiment, and various modifications can be made based on the spirit of the present invention, and they are not excluded from the scope of the present invention.
15 車両用ナビゲーション装置
43 経路記憶部
44 経路比較部
45 案内経路設定部
51、54、61、64 出発地
52、55、62、65 目的地
53a、56、66 経路
57、57−2、67a、67b ノード
58、68 案内経路
53、63 記憶経路15
Claims (8)
Translated fromJapanese(b)入力された出発地から目的地までの経路を探索する経路探索部と、
(c)前記探索された経路と前記記憶経路とを比較する経路比較部と、
(d)該経路比較部の比較によって前記探索された経路と前記記憶経路との出発地が一致する場合、前記記憶経路の少なくとも前記出発地を含む一部を案内経路とする案内経路設定部とを有し、
(e)該案内経路設定部は、前記探索された経路と前記記憶経路とが同一のノードを複数含んでいる場合、前記出発地から最も遠距離に存在する同一のノードまでの記憶経路を案内経路とすることを特徴とするナビゲーション装置。(A) a route storage unit that stores a past route as a storage route together with a departure place and a destination;
(B) a route search unit for searching for a route from the input departure point to the destination;
(C) a route comparison unit that compares the searched route with the stored route;
(D) a guide route setting unit that uses at least a part of the storage route including the departurepoint as a guide route when the route searched by the route comparison unit matches the departurepoint of the storage route;have a,
(E) When the searched route and the storage route include a plurality of the same nodes, the guide route setting unit guides the storage route to the same node existing at the longest distance from the departure place. A navigation device characterized by aroute .
(b)入力された出発地から目的地までの経路を探索する経路探索部と、
(c)前記探索された経路と前記記憶経路とを比較する経路比較部と、
(d)該経路比較部の比較によって前記探索された経路と前記記憶経路との目的地が一致する場合、前記記憶経路の少なくとも前記目的地を含む一部を案内経路とする案内経路設定部とを有し、
(e)該案内経路設定部は、前記探索された経路と前記記憶経路とが同一のノードを複数含んでいる場合、前記目的地から最も遠距離に存在する同一のノードまでの記憶経路を案内経路とすることを特徴とするナビゲーション装置。(A) a route storage unit that stores a past route as a storage route together with a departure place and a destination;
(B) a route search unit for searching for a route from the input departure point to the destination;
(C) a route comparison unit that compares the searched route with the stored route;
(D) a guide route setting unit that uses at least a part of the storage route including the destination as a guide route when the route searched by the comparison by the route comparison unit matches the destination of the storage route; Have
(E) When the searched route and the storage route include a plurality of the same nodes, the guide route setting unit guides the storage route to the same node existing at the farthest distance from the destination. A navigation devicecharacterized by a route .
(b)入力された出発地から目的地までの経路を探索する経路探索部と、
(c)前記探索された経路と前記記憶経路とを比較する経路比較部と、
(d)該経路比較部の比較によって前記探索された経路と前記記憶経路との出発地が一致する場合、前記記憶経路の少なくとも前記出発地を含む一部を案内経路とする案内経路設定部とを有し、
(e)該案内経路設定部は、前記探索された経路と記憶経路とが互いに隣接するノードを含んでいる場合、前記出発地から前記ノードまでの記憶経路を案内経路とすることを特徴とするナビゲーション装置。(A) a route storage unit that stores a past route as a storage route together with a departure place and a destination;
(B) a route search unit for searching for a route from the input departure point to the destination;
(C) a route comparison unit that compares the searched route with the stored route;
(D) a guide route setting unit that uses at least a part of the storage route including the departure point as a guide route when the route searched by the route comparison unit matches the departure point of the storage route; Have
(E) the guidance route setting unit, when the searched route and the storage path contains adjacent nodes to each other,and characterized in that the guide route storage path of the todeparture or we said nodes navigation devicethat.
(b)入力された出発地から目的地までの経路を探索する経路探索部と、
(c)前記探索された経路と前記記憶経路とを比較する経路比較部と、
(d)該経路比較部の比較によって前記探索された経路と前記記憶経路との目的地が一致する場合、前記記憶経路の少なくとも前記目的地を含む一部を案内経路とする案内経路設定部とを有し、
(e)該案内経路設定部は、前記探索された経路と記憶経路とが互いに隣接するノードを含んでいる場合、前記目的地から前記ノードまでの記憶経路を案内経路とすることを特徴とするナビゲーション装置。(A) a route storage unit that stores a past route as a storage route together with a departure place and a destination;
(B) a route search unit for searching for a route from the input departure point to the destination;
(C) a route comparison unit that compares the searched route with the stored route;
(D) a guide route setting unit that uses at least a part of the storage route including the destination as a guide route when the route searched by the comparison by the route comparison unit matches the destination of the storage route; Have
(E) When the searched route and the storage route include nodes adjacent to each other, the guide route setting unit sets the storage route from the destination to the node as a guide route. Navigation device.
(b)前記記憶経路は、前記登録地点を結ぶ走行経路のうち、所定以上の頻度で走行する経路である請求項1〜6のいずれか1項に記載のナビゲーション装置。(A) having a point registration unit for registering a desired point as a registration point;
(B) The navigation device according to any one of claims 1 to 6, wherein the storage route is a route that travels at a predetermined frequency or more among travel routes that connect the registration points.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003334856AJP3969373B2 (en) | 2003-09-26 | 2003-09-26 | Navigation device |
| US10/898,940US7463972B2 (en) | 2003-09-26 | 2004-07-27 | Navigation apparatus and method |
| DE602004018445TDE602004018445D1 (en) | 2003-09-26 | 2004-09-17 | Navigation device, method and computer program |
| EP04022208AEP1519151B1 (en) | 2003-09-26 | 2004-09-17 | Navigation apparatus, method and computer program |
| CNB200410011977XACN100543422C (en) | 2003-09-26 | 2004-09-27 | navigation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003334856AJP3969373B2 (en) | 2003-09-26 | 2003-09-26 | Navigation device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005098904A JP2005098904A (en) | 2005-04-14 |
| JP3969373B2true JP3969373B2 (en) | 2007-09-05 |
Family
ID=34462415
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003334856AExpired - Fee RelatedJP3969373B2 (en) | 2003-09-26 | 2003-09-26 | Navigation device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3969373B2 (en) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4968903B2 (en)* | 2006-12-05 | 2012-07-04 | アルパイン株式会社 | Navigation device |
| JP5027737B2 (en)* | 2008-05-30 | 2012-09-19 | 株式会社ゼンリンデータコム | Route guidance system and route search server used in the route guidance system |
| CN102194312B (en)* | 2010-03-05 | 2014-07-02 | 高德软件有限公司 | Road merging method and road merging device |
| JP5885927B2 (en)* | 2011-02-07 | 2016-03-16 | 株式会社ナビタイムジャパン | NAVIGATION SYSTEM, SERVER DEVICE, TERMINAL DEVICE, NAVIGATION DEVICE, NAVIGATION METHOD, AND PROGRAM |
| US10154382B2 (en) | 2013-03-12 | 2018-12-11 | Zendrive, Inc. | System and method for determining a driver in a telematic application |
| JP5928392B2 (en) | 2013-03-28 | 2016-06-01 | アイシン・エィ・ダブリュ株式会社 | Route search system, route search method, and route search program |
| JP6487739B2 (en)* | 2015-03-23 | 2019-03-20 | アイシン・エィ・ダブリュ株式会社 | Route search system, route search method and computer program |
| US9818239B2 (en) | 2015-08-20 | 2017-11-14 | Zendrive, Inc. | Method for smartphone-based accident detection |
| ES2904564T3 (en) | 2015-08-20 | 2022-04-05 | Zendrive Inc | Accelerometer assisted navigation method |
| WO2018049416A1 (en) | 2016-09-12 | 2018-03-15 | Zendrive, Inc. | Method for mobile device-based cooperative data capture |
| US10012993B1 (en) | 2016-12-09 | 2018-07-03 | Zendrive, Inc. | Method and system for risk modeling in autonomous vehicles |
| US10304329B2 (en) | 2017-06-28 | 2019-05-28 | Zendrive, Inc. | Method and system for determining traffic-related characteristics |
| US11151813B2 (en) | 2017-06-28 | 2021-10-19 | Zendrive, Inc. | Method and system for vehicle-related driver characteristic determination |
| EP3717996B1 (en) | 2017-11-27 | 2023-12-20 | Zendrive, Inc. | System and method for vehicle sensing and analysis |
| JP7392422B2 (en)* | 2019-11-25 | 2023-12-06 | コベルコ建機株式会社 | Work support server and work support system |
| US12400272B2 (en) | 2019-12-02 | 2025-08-26 | Credit Karma, Llc | System and method for assessing device usage |
| US11775010B2 (en) | 2019-12-02 | 2023-10-03 | Zendrive, Inc. | System and method for assessing device usage |
| WO2021113475A1 (en) | 2019-12-03 | 2021-06-10 | Zendrive, Inc. | Method and system for risk determination of a route |
| WO2023102257A2 (en) | 2021-12-03 | 2023-06-08 | Zendrive, Inc. | System and method for trip classification |
- 2003
- 2003-09-26JPJP2003334856Apatent/JP3969373B2/ennot_activeExpired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005098904A (en) | 2005-04-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100543422C (en) | navigation device | |
| JP3969373B2 (en) | Navigation device | |
| EP0833291B2 (en) | Vehicle navigation apparatus and storage medium | |
| EP1146496B1 (en) | Method and system for providing routing guidance | |
| JP4277746B2 (en) | Car navigation system | |
| US6169956B1 (en) | Vehicle navigation system providing for determination of a point on the border of a map stored in memory on the basis of a destination remote from the area covered by the map | |
| US6269303B1 (en) | Vehicle navigation system and recording medium | |
| JP3801433B2 (en) | Navigation device and storage medium thereof | |
| US6415225B1 (en) | Navigation system and a memory medium | |
| US20060271285A1 (en) | Navigation device | |
| US6845319B2 (en) | Navigation apparatus, method and program for updating facility information and recording medium storing the program | |
| JP4305181B2 (en) | Navigation device | |
| JP3629885B2 (en) | Vehicle navigation device and medium storing computer program for navigation processing | |
| JP4635376B2 (en) | Navigation device and navigation program | |
| JP3546719B2 (en) | Vehicle navigation device and storage medium | |
| US8560226B2 (en) | Navigation device and navigation method | |
| JP2002310695A (en) | Navigation device and navigation program | |
| JP2003042787A (en) | Navigation system and navigation program | |
| JP4561355B2 (en) | Navigation device | |
| JP4261967B2 (en) | Vehicle navigation apparatus, program for the apparatus, and recording medium | |
| JP4392512B2 (en) | Navigation device | |
| JP2005326304A (en) | Navigation device | |
| JP4078942B2 (en) | In-vehicle device | |
| JP2005326306A (en) | Navigation device | |
| JP4621976B2 (en) | Vehicle navigation device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20050310 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20061121 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20061212 | |
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20070208 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20070515 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20070528 | |
| R150 | Certificate of patent or registration of utility model | Free format text:JAPANESE INTERMEDIATE CODE: R150 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20110615 Year of fee payment:4 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20110615 Year of fee payment:4 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20120615 Year of fee payment:5 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20120615 Year of fee payment:5 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20130615 Year of fee payment:6 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20140615 Year of fee payment:7 | |
| LAPS | Cancellation because of no payment of annual fees |