JP2025060382A - CONTROL DEVICE AND REQUEST PROCESSING SYSTEM COMPRISING THE SAME - Google Patents
CONTROL DEVICE AND REQUEST PROCESSING SYSTEM COMPRISING THE SAMEDownload PDFInfo
- Publication number
- JP2025060382A JP2025060382AJP2024064292AJP2024064292AJP2025060382AJP 2025060382 AJP2025060382 AJP 2025060382AJP 2024064292 AJP2024064292 AJP 2024064292AJP 2024064292 AJP2024064292 AJP 2024064292AJP 2025060382 AJP2025060382 AJP 2025060382A
- Authority
- JP
- Japan
- Prior art keywords
- information
- episode
- control signal
- request
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Manipulator (AREA)
Abstract
Description
Translated fromJapanese本発明は、要求に応じた処理を行わせるための制御信号を生成して処理ユニットを制御する制御装置及びそれを具備する要求処理システムに関する。The present invention relates to a control device that generates a control signal to control a processing unit to perform processing according to a request, and a request processing system that includes the control device.
ロボットが要求に応じた処理を行うホームサービスロボットシステムは、利用される家庭固有の情報、例えば、利用現場の間取りや物の配置等の情報が、ロボットの制御信号を生成する制御装置に予め登録されている。制御装置に登録されている当該情報を基礎情報として、制御装置が制御信号を生成する際に利用する情報が基礎情報のみの場合、利用可能な基礎情報が登録されていない要求に対しては、利用者による基礎情報の更新等がなされるまで、その要求に対する処理を行うことができない。In a home service robot system in which a robot processes requests, information specific to the home being used, such as the layout of the site of use and the placement of objects, is preregistered in a control device that generates control signals for the robot. If the information registered in the control device is the basic information and the control device uses only the basic information when generating control signals, then requests for which usable basic information is not registered cannot be processed until the basic information is updated by the user.
この点、非特許文献1、2に示されているような海馬モデルをホームサービスロボットシステムに適用すれば、ロボットの利用現場での経験により生じるエピソード情報も制御信号の生成の際に利用することが可能となる。ここで、エピソード情報とは、ロボットが検知した視覚情報、聴覚情報、臭覚情報、味覚情報及び触覚情報のいずれか1つ又は複数に位置情報及び時間情報を組み合わせて構成されるものであり、例えば、先週の火曜日の午後1時にミネラル水のペットボトルが冷蔵庫内にあった等の情報である。In this regard, if the hippocampus model shown in Non-Patent
しかしながら、海馬モデルを適用したホームサービスロボットシステムであっても、基礎情報及びエピソード情報に制御信号の生成に有効な情報が存在しない場合、ロボットに要求に応じた処理を行わせることができない。これは、ホームサービスロボットシステムに限定されず、ロボット以外の処理ユニット(例えば、利用者の要求に応じてその利用者に合った内容を表示するモニタ)を有するシステムでも同様であった。However, even in a home service robot system that applies the hippocampus model, if the basic information and episode information do not contain information that is effective for generating a control signal, the robot cannot be made to perform processing according to the request. This is not limited to home service robot systems, but is also true for systems that have processing units other than a robot (for example, a monitor that displays content appropriate to the user in response to the user's request).
本発明は、かかる事情に鑑みてなされたもので、処理ユニットを制御するために有効な基礎情報及びエピソード情報がなくとも処理ユニットに要求に応じた処理を行わせるための制御信号を生成可能な制御装置及びそれを具備する要求処理システムを提供することを目的とする。The present invention has been made in consideration of the above circumstances, and aims to provide a control device and a request processing system equipped with the same that can generate control signals for causing a processing unit to perform processing according to a request even in the absence of basic information and episode information that are effective for controlling the processing unit.
前記目的に沿う第1の発明に係る制御装置は、要求に応じた処理を行わせるための制御信号を処理ユニットに与えて該処理ユニットを制御する制御装置において、前記処理ユニットが検知した視覚情報、聴覚情報、臭覚情報、味覚情報及び触覚情報のいずれか1つ又は複数に位置情報及び時間情報を組み合わせて形成されるエピソード情報を記憶するエピソード記憶部と、前記制御信号を生成する制御信号生成部とを備え、前記制御信号生成部は、前記制御信号の生成に利用する情報を、前記エピソード記憶部が記憶している前記エピソード情報、及び、大規模言語モデルから取得する一般的な情報のいずれにするか、又は、双方とするかを選択する。A control device according to a first invention that meets the above objective controls a processing unit by providing the processing unit with a control signal for causing the processing unit to perform processing in response to a request, and includes an episode memory unit that stores episode information formed by combining positional information and temporal information with one or more of visual information, auditory information, olfactory information, gustatory information, and tactile information detected by the processing unit, and a control signal generation unit that generates the control signal, and the control signal generation unit selects whether the information to be used in generating the control signal is the episode information stored in the episode memory unit or general information obtained from a large-scale language model, or both.
前記目的に沿う第2の発明に係る要求処理システムは、要求に応じた処理を行う処理ユニット及び要求に応じた処理を行わせるための制御信号を生成して前記処理ユニットに与える制御信号生成部を有する要求処理システムにおいて、前記処理ユニットが検知した視覚情報、聴覚情報、臭覚情報、味覚情報及び触覚情報のいずれか1つ又は複数に位置情報及び時間情報を組み合わせて形成されるエピソード情報を記憶するエピソード記憶部を備え、前記制御信号生成部は、前記制御信号の生成に利用する情報を、前記エピソード記憶部が記憶している前記エピソード情報、及び、大規模言語モデルから取得する一般的な情報のいずれにするか、又は、双方とするかを選択する。A request processing system according to a second invention that meets the above objective has a processing unit that performs processing in response to a request and a control signal generation unit that generates a control signal for causing the processing in response to the request and provides the processing unit with the control signal, and further includes an episode memory unit that stores episode information formed by combining positional information and temporal information with one or more of visual information, auditory information, olfactory information, gustatory information, and tactile information detected by the processing unit, and the control signal generation unit selects whether the information to be used in generating the control signal is the episode information stored in the episode memory unit or general information obtained from a large-scale language model, or both.
第1の発明に係る制御装置は、処理ユニットが検知した視覚情報、聴覚情報、臭覚情報、味覚情報及び触覚情報のいずれか1つ又は複数に位置情報及び時間情報を組み合わせて形成されるエピソード情報を記憶するエピソード記憶部と、制御信号を生成する制御信号生成部とを備え、制御信号生成部が、制御信号の生成に利用する情報を、エピソード記憶部が記憶しているエピソード情報、及び、大規模言語モデルから取得する一般的な情報のいずれにするか、又は、双方とするかを選択する。The control device according to the first invention includes an episode memory unit that stores episode information formed by combining one or more of visual information, auditory information, olfactory information, gustatory information, and tactile information detected by a processing unit with positional information and temporal information, and a control signal generation unit that generates a control signal, and the control signal generation unit selects whether the information to be used in generating the control signal is the episode information stored in the episode memory unit or general information obtained from a large-scale language model, or both.
また、第2の発明に係る要求処理システムは、処理ユニットが検知した視覚情報、聴覚情報、臭覚情報、味覚情報及び触覚情報のいずれか1つ又は複数に位置情報及び時間情報を組み合わせて形成されるエピソード情報を記憶するエピソード記憶部を備え、制御信号生成部が、制御信号の生成に利用する情報を、エピソード記憶部が記憶しているエピソード情報、及び、大規模言語モデルから取得する一般的な情報のいずれにするか、又は、双方とするかを選択する。
従って、第1の発明に係る制御装置及び第2の発明に係る要求処理システムは、処理ユニットを制御するために有効な基礎情報及びエピソード情報がなくとも制御信号を生成可能である。In addition, the request processing system of the second invention includes an episode memory unit that stores episode information formed by combining one or more of the visual information, auditory information, olfactory information, gustatory information, and tactile information detected by the processing unit with positional information and temporal information, and the control signal generation unit selects whether the information to be used in generating the control signal is the episode information stored in the episode memory unit or general information obtained from a large-scale language model, or both.
Therefore, the control device according to the first aspect of the invention and the request processing system according to the second aspect of the invention are capable of generating a control signal even without effective basic information and episode information for controlling the processing unit.
続いて、添付した図面を参照しつつ、本発明を具体化した実施の形態につき説明し、本発明の理解に供する。
図1に示すように、本発明の第1の実施の形態に係る要求処理システム10は、要求に応じた処理を行う処理ユニットの一例であるロボット11及び要求に応じた処理を行わせるための制御信号を生成してロボット11に与える制御信号生成部12を有するシステムである。以下、詳細に説明する。Next, with reference to the attached drawings, an embodiment of the present invention will be described for understanding the present invention.
1, a
ロボット11は、図1に示すように、アーム13、自走機構14、撮像手段15、複数のセンサ16、メモリ17、制御部18及び入力部19等を有している。アーム13及び自走機構14はそれぞれ複数の駆動部(モータ等)を具備し、制御部18はそれらの駆動部を作動するための指令信号を送ってアーム13及び自走機構14を制御する。アーム13は物を把持できるように設計され、自走機構14はロボット11が移動できるように設計されている。As shown in Figure 1, the
撮像手段15はロボット11の周囲を撮像できるように撮像方向等が調整されている。複数のセンサ16はそれぞれ圧力センサや距離センサ等であり、制御部18は撮像手段15が撮像した画像及び各センサ16の検出値を撮像手段15及び各センサ16からそれぞれ取得可能である。撮像手段15が撮像した画像及び各センサ16の検出値は適宜メモリ17に記憶される。The imaging means 15 has its imaging direction adjusted so that it can capture images of the
入力部19はタッチパネル、キーボード及びマイクのいずれか一つ又は複数を有し、要求処理システム10の利用者は、ロボット11への要求(例えば、テレビのリモコンを家の中で検索して利用者の元に持ってくるという要求)やロボット11が処理を行うために必要な情報(以下、「基礎情報」とも言う)等を入力部19に対する操作や発声によって要求処理システム10に与えることができる。入力部19は制御部18との間で信号の送受信ができればよく、例えば、無線通信機能付きのリモコンであってもよい。The
要求処理システム10は、CPU及びメモリ等によって構成可能でロボット11に有線接続又は無線接続された制御装置20を備えている。制御装置20は、制御信号生成部12に加え、ロボット11の行動(ロボット11が行った処理)等を基にして生成されたエピソード情報を記憶するエピソード記憶部21及び基礎情報等を記憶する基礎情報記憶部22を備えている。The
エピソード情報とは、ロボット11のセンサ16等が検知した視覚情報、聴覚情報、臭覚情報、味覚情報及び触覚情報(以下、これらをまとめて「知覚情報」とも言う)のいずれか1つ又は複数に、知覚情報を検知した位置の情報(以下、「位置情報」とも言う)及び知覚情報を検知した時間(日時)の情報(以下、「時間情報」とも言う)を組み合わせた情報である。Episode information is information that combines one or more of the visual information, auditory information, olfactory information, taste information, and tactile information (hereinafter collectively referred to as "perceptual information") detected by the
例えば、テレビのリモコンを家の中で検索して利用者の元に持ってくるという要求に対して、ロボット11が11月11日の13時5分にリビングのローテーブルにテレビのリモコンが無く同日の13時10分に台所のダイニングテーブルの上でテレビのリモコンを発見し取得した場合、11月11日の13時5分にリビングのローテーブルにテレビのリモコンが無かったというエピソード情報、及び、11月11日の13時10分に台所のダイニングテーブル上にテレビのリモコンがあったというエピソード情報が生成される。For example, in response to a request to search for a TV remote control in the house and bring it to the user, if the
基礎情報とは、要求処理システム10が利用される家庭(現場)の情報、例えば、その家庭のレイアウト等(部屋の間取りやどの部屋のどの位置に何が配置されているか等)の情報である。基礎情報は要求処理システム10を利用する前の準備段階で制御装置20が外部から通信により取得すること等によって基礎情報記憶部22に与えられ基礎情報記憶部22に記憶される。The basic information is information about the home (site) where the
家庭の状況が変化(例えば、レイアウトを変更)した際には、適宜、基礎情報記憶部22に新しい基礎情報が与えられたり、記憶している基礎情報が修正されたりする。本実施の形態では、基礎情報記憶部22とエピソード記憶部21が接続されており、エピソード記憶部21に記憶されている所定のエピソード情報(例えば、所定期間内に同じ事象が所定回数検出されたエピソード情報)が基礎情報として基礎情報記憶部22にも記憶される。When the situation at home changes (e.g., the layout is changed), new basic information is provided to the basic
また、制御装置20には、外部ネットワークを介して、大規模言語モデル23が接続されている。本実施の形態において、大規模言語モデル23はインターネット回線経由で情報を収集し、回答を求められた事柄に対応する情報を返すモデルである。なお、大規模言語モデル23のタイプは特に限定されない。制御装置20は、大規模言語モデル23との間で情報を送受信するデータ入出力部24及び大規模言語モデル23からデータ入出力部24経由で与えられる情報を解析して(制御信号生成部12が利用できる情報に変換して)制御信号生成部12に与える解析部25を具備している。本実施の形態では、制御装置20がチップとして構成されているが、これに限定されない。In addition, the
制御信号生成部12が解析部25から得る大規模言語モデル23から与えられる情報は、要求処理システム10が利用されている家庭に固有の情報ではなく、一般的な情報(共通情報)である。例えば、日本国では一般家庭においてテレビのリモコンが置かれている可能性が高い場所は、テレビボードの上、リビングテーブルの上、ダイニングテーブルの上及びリビングのソファの上であるという情報が一般的な情報に該当する。The information provided by the large-
利用者からロボット11に対して新たな要求がなされると、制御信号生成部12は、基礎情報記憶部22から必要な基礎情報を取得し、更に、エピソード記憶部21にその新たな要求に対応する制御信号を生成するために利用可能なエピソード情報の有無を検出する。制御信号生成部12は、制御信号の生成に有効なエピソード情報がエピソード記憶部21に有ることを検出した場合、基礎情報及びその有効な情報を基に制御信号を生成する。When a new request is made to the
ここで言う「制御信号の生成に有効なエピソード情報」とは、基礎情報記憶部22に記憶されている1つ又は複数のエピソード情報のみから制御信号を生成できる場合の、その1つ又は複数のエピソード情報を意味する。The term "episode information effective for generating a control signal" refers to one or more pieces of episode information stored in the basic
一方、制御信号生成部12は、制御信号の生成に有効なエピソード情報がエピソード記憶部21に無いことを検出した場合、データ入出力部24を介して、大規模言語モデル23に新たな要求に関連性のある一般的な情報を求める。これによって、制御信号生成部12は、データ入出力部24及び解析部25経由で大規模言語モデル23から一般的な情報を取得し、基礎情報及び取得した一般的な情報を基に制御信号を生成する。
ここで、制御信号生成部12が大規模言語モデル23に新たな要求に関連性のある一般的な情報を求める際のオプションとして以下の2つが存在する。On the other hand, when the control
Here, there are two options for the
オプション1:
新たな要求についての問い合わせのみを大規模言語モデル23に行う。
例えば、新たな要求が乾電池を探して持ってくるというものであれば、新たな要求についての問い合わせは、一般家庭で乾電池が置かれている可能性のある場所はどこかというものになる。Option 1:
Only new requests are queried from the
For example, if the new requirement is to find and bring back dry cell batteries, the inquiry about the new requirement will be where in an average household dry cell batteries might be placed.
オプション2:
新たな要求についての問い合わせを大規模言語モデル23に行う際、エピソード記憶部21に記憶されているエピソード情報を大規模言語モデル23に提供する。
例えば、新たな要求が乾電池を探して持ってくるというものであれば、大規模言語モデル23に提供されるエピソード情報は、電球のストックが先月リビングの整理棚にあったという情報や、工具は寝室のクローゼット内に収納されているという情報である。大規模言語モデル23に提供されるエピソード情報は1つであってもよいし、複数であってもよい。Option 2:
When a query about a new requirement is made to the large
For example, if a new request is to find and bring back dry-cell batteries, the episode information provided to the large-
オプション1、2のいずれを選択するかや、オプション2を選択した場合でも大規模言語モデル23に提供されるエピソード情報がどのような情報かによって、大規模言語モデル23から与えられる情報は異なる。オプション1、2のいずれを選択するかは設定により定めることが可能である。The information provided by the large-
従って、本実施の形態では、エピソード記憶部21にロボット11への要求に対応するエピソード情報が記憶されている場合、そのエピソード情報及び基礎情報を基に(該当のエピソード情報を用いて)制御信号を生成し、エピソード記憶部21にロボット11への要求に対応するエピソード情報が記憶されていない場合、大規模言語モデル23から対応する一般的な情報を取得しその一般的な情報及び基礎情報を基に(該当の一般的な情報を用いて)制御信号を生成する。Therefore, in this embodiment, if episode information corresponding to a request to the
また、制御信号の生成のために利用可能なエピソード情報がエピソード記憶部21に存在しても、大規模言語モデル23から一般的な情報を取得し、基礎情報、エピソード情報及び一般的な情報を基に制御信号を生成するようにしてもよい。例えば、制御信号の生成のために利用可能なエピソード情報がエピソード記憶部21に存在するが、該当のエピソード情報が古い(例えば、半年前のエピソード情報)場合には、基礎情報、エピソード情報及び一般的な情報を基に制御信号を生成する。この場合も、制御信号生成部12が大規模言語モデル23に情報を求める際、上述したオプション1、2のいずれかを採用できる。In addition, even if episode information that can be used to generate a control signal exists in the
よって、制御信号生成部12は、新たな要求に対応する制御信号を生成するために利用する情報を、エピソード記憶部21が記憶しているエピソード情報、及び、大規模言語モデル23から取得する一般的な情報のいずれにするか、又は、双方とするかを予め設定された条件に従って選択し、選択した情報を用いて制御信号を生成することができる。そのため、制御信号生成部12は、制御信号の生成に利用できるエピソード情報が存在しない場合であっても、大規模言語モデル23から取得する一般的な情報を用いて制御信号を生成可能である。Therefore, the control
ロボット11は、制御信号生成部12が生成した制御信号を制御部18が受信して、アーム13や自走機構14等を作動させ、与えられた要求に対する処理を行う。ロボット11が行った処理により、要求を実現できた場合(テレビのリモコンを検索して利用者に渡すことができた等)、その過程で生じたセンサ16の検出値等の情報が制御部18で整理され、エピソード記憶部21に送られ、新たなエピソード情報としてエピソード記憶部21に追加(記憶)される。ロボット11は新たな要求を待機するモードとなる。The
一方、ロボット11が行った処理により、要求を実現できなかった場合(テレビのリモコンを検索したが見つからなかった等)、その課程で生じたセンサ16の検出値等の情報が制御部18で整理され、エピソード記憶部21に送られ、新たなエピソード情報(例えば、検索したダイニングテーブル及びリビングテーブルにテレビのリモコンが無かったという情報)がエピソード記憶部21に追加される。そして、新たな制御信号(例えば、別の場所でテレビのリモコンを検索するための制御信号)を生成すべく、新たな一般的な情報を大規模言語モデル23から取得したり、ロボット11が利用者に必要な情報の入力を要求したりする。その後、ロボット11は新たな制御信号を与えられてその制御信号に基づく処理を行う。On the other hand, if the request cannot be fulfilled by the processing performed by the robot 11 (e.g., the TV remote control is searched for but not found), information generated during the process, such as the detection values of the
また、要求処理システム10では、制御装置20をロボット本体と分離して、外側に配置しているので、ロボット本体の軽量化を実現でき、バッテリーの消耗などを抑制可能となる。さらに設計の仕方によれば、一台の制御装置20にて複数のロボット11を同時にあるいは個別にコントロールすることも可能となり、この際、エピソード記憶部21及び基礎情報記憶部22は、複数のロボット11毎に対応して設けることが好ましい。In addition, in the
更に、大規模言語モデル23をインターネットなどを介して取得する場合には、制御装置20をロボット本体外に設けることで接続性を安定させることができる。即ち、制御装置20をロボット本体内に設けた場合であって、例えば、インターネットとの接続を無線で行う場合に、ロボットの移動した位置により、送受信状態が、不安定になることがある。
従って、特に無線にてインターネットに接続させる場合には、制御装置20をロボット本体とは別の所に固定させることにより、インターネットなどの接続状態を安定化させることができ、信頼性を向上させることができる。Furthermore, when the large-
Therefore, particularly when connecting to the Internet wirelessly, by fixing the
制御装置20を、制御装置20の機能をプログラムにて実施可能な、ノートブックパソコン、デスクトップパソコンなどのパーソナルコンピューターや、スマートホン、タブレット端末等のモバイル通信端末などで構成することができる。
その他、制御装置20を、モジュール基板上にワンチップICで構成しても良いし、複数の半導体ICを組み合わせて構成してもよい。なお、本実施の形態では、制御装置20をロボット11の各部を収納するロボット本体(図示せず)の外に設けたが、制御装置20の全部もしくは少なくとも一部をロボット本体内に設けてもよい。The
Alternatively, the
制御装置20全部をロボット本体に設ける構成にすることで、ロボット11と制御装置20との間のデータ通信部材を簡略化することができるとともに、自律動作可能なロボット11を提供可能となる。
また、ロボットの仕様や使用形態に応じて、制御装置20の一部をロボット本体に収納することが可能となる。例えば、大規模言語モデル23とのアクセスを司る、解析部25及びデータ入出力部24をロボット本体外に配置して、その他の部分をロボット本体に収納すること等も考えられる。By providing the
In addition, depending on the specifications and usage of the robot, it is possible to store part of the
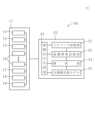
ここまで説明した要求処理システム10は、大規模言語モデル23を有さないシステムであるが、図2に示すように、大規模言語モデル31を備える本発明の第2の実施の形態に係る要求処理システム30を採用してもよい。
大規模言語モデル31は、所定のソフトウェア及びサーバによって構成でき、制御装置32に設けられている(制御装置32が大規模言語モデル31を備えている)。大規模言語モデル31は、内部回線及びインターネット回線を経由してインターネット上の情報を収集し一般的な情報を生成する。The
The large-
要求処理システム30は、制御信号生成部33及び大規模言語モデル23から取得する一般的な情報を解析して制御信号生成部33に与える解析部34が大規模言語モデル31に接続されている。なお、要求処理システム30において、要求処理システム10と同様の構成は同じ符号を付して詳しい説明を省略する。The
また、制御信号生成部を、エピソード記憶部及び大規模言語モデルに必要な情報の問い合わせ等を行う評価統合手段と制御信号を生成する信号生成手段とに分けてもよい。図3~図6を参照して、制御信号生成部を信号生成手段42と評価統合手段43に分けた制御装置41、及び、その制御装置41及びロボット11を備える本発明の第3の実施の形態に係る要求処理システム40について説明する。なお、要求処理システム40において、要求処理システム10と同様の構成については同じ符号を付して詳しい説明を省略する。The control signal generation unit may also be divided into an evaluation integration means for making inquiries of the episode storage unit and the large-scale language model for information required, and a signal generation means for generating control signals. With reference to Figures 3 to 6, a
制御装置41は、図3に示すように、信号生成手段42に接続された評価統合手段43を備え、信号生成手段42と評価統合手段43は情報(データ)のやり取りが可能である。評価統合手段43は、利用者から要求処理システム40に対する要求の情報(以下、「要求情報」とも言う)を信号生成手段42経由で取得できる。更に、評価統合手段43は、エピソード記憶部44との間、及び、大規模言語モデル45との間でも情報のやり取りが可能であり、取得した要求情報に応じて、エピソード記憶部44及び大規模言語モデル45にそれぞれ(いずれか一方の場合もある)要求情報に対応するエピソード情報及び一般的な情報を問い合わせて取得することができる。As shown in FIG. 3, the
そして、エピソード情報や一般的な情報を取得した評価統合手段43は、その情報を基にして、信号生成手段42が制御信号の生成に必要な情報を信号生成手段42に与える。なお、図示化は省略しているが、制御装置41には基礎情報記憶部や解析部等が設けられている。
以下、要求処理システム40の要求に対する処理の具体例について説明する。Then, the evaluation integration means 43, which has acquired the episode information and general information, provides the signal generation means 42 with information necessary for the signal generation means 42 to generate a control signal based on that information. Although not shown in the figure, the
A specific example of the process performed by the
<第1の例>
利用者から所定のオブジェクトを利用者の元に持っていくという要求がなされた場合、図4に示すように、(1)評価統合手段43はロボット11が当該オブジェクトを利用者の元に持っていくために必要なエピソード情報をエピソード記憶部44に問い合わせる。
該当のエピソード情報が見つかった場合、(2)評価統合手段43はエピソード記憶部44から該当のエピソード情報を取得する。(3)信号生成手段42は評価統合手段43から必要な情報を取得して制御信号を生成し、(4)制御信号をロボット11に送信する。制御信号を受信したロボット11が行動中のセンサ16の検出値等を基にしてエピソード情報が生成され、(5)そのエピソード情報が評価統合手段43を介してエピソード記憶部44に記憶される。<First Example>
When a user requests that a specific object be brought to the user, as shown in FIG. 4, (1) the evaluation integration means 43 queries the
When the corresponding episode information is found, (2) the evaluation integration means 43 acquires the corresponding episode information from the
一方、(1)評価統合手段43からエピソード記憶部44へのエピソード情報の問い合わせに対して、要求に対応するエピソード情報がエピソード記憶部44に存在しなかった場合、(2)評価統合手段43は、図5に示すように、ロボット11が所定のオブジェクトを利用者の元に持っていくために必要な一般的な情報を大規模言語モデル45に問い合わせ、(3)該当の一般的な情報を大規模言語モデル45から取得する。評価統合手段43が大規模言語モデル45に情報を求める際、上述したオプション1、2のいずれかを採用できる。On the other hand, (1) if the
(4)信号生成手段42は評価統合手段43から一般的な情報を制御信号の生成に必要な情報として取得して制御信号を生成し、(5)制御信号をロボット11に送信する。ロボット11が行動中のセンサ16の検出値等を基にしてエピソード情報が生成され、(6)そのエピソード情報が評価統合手段43を介してエピソード記憶部44に記憶される。(4) The signal generating means 42 obtains general information from the evaluation integration means 43 as information necessary for generating a control signal, generates a control signal, and (5) transmits the control signal to the
なお、評価統合手段43からの問い合わせに対し、エピソード記憶部44及び大規模言語モデル45のいずれからも制御信号の生成に有効な情報を取得できなかった場合、制御装置32は、利用者から所定のオブジェクトの位置等を教示されて、制御信号を作成し、ロボット11に送信する。If, in response to a query from the evaluation integration means 43, information useful for generating a control signal cannot be obtained from either the
<第2の例>
利用者から所定のオブジェクトを利用者の元に持っていくという要求に対し、エピソード記憶部44にそのオブジェクトのエピソード情報はあるが、そのエピソード情報が制御信号の作成への利用には妥当でない場合がある。例えば、季節により置き場所が変わるオブジェクトであり、エピソード記憶部44に記憶されている該当のオブジェクトのエピソード情報の季節(例えば、夏)が、現在(要求がなされた時点)の季節(例えば、冬)と異なっている場合である。<Second Example>
In response to a request from a user to bring a specific object to the user, the
これについて、制御信号生成部は、エピソード記憶部44にロボット11への要求に対応するエピソード情報(冬、利用者に該当のオブジェクトを持っていったというエピソード情報)が記憶されている場合、評価統合手段43がそれを検知し、そのエピソード情報を信号生成手段42に与え、信号生成手段42がそのエピソード情報を用いて制御信号を生成する。In this regard, when episode information corresponding to the request to the robot 11 (episode information that in winter, the user brought the relevant object) is stored in the
一方、エピソード記憶部44にロボット11への要求に対応するエピソード情報が記憶されていない場合、評価統合手段43は、図6に示すように、(1)要求に関連性のある一般的な情報を大規模言語モデル45に問い合わせ、(2)該当の一般的な情報を大規模言語モデル45から取得する。この場合も、評価統合手段43が大規模言語モデル45に情報を求める際、上述したオプション1、2のいずれかを採用できる。冬カフェオレを利用者の元に持っていくという要求に対して、その要求に関連性のある一般的な情報とは、例えば、カフェオレの表現揺れにあたる物品が何かの情報(例、カフェオレの表現揺れにあたる物品はコーヒー牛乳であるという情報)や、カフェオレに類似の物品(例、コーヒー)が冬に家庭で置かれている場所の情報である。On the other hand, if the
そして、(3)評価統合手段43は、大規模言語モデル45から所得した要求に関連性のある一般的な情報が制御信号の生成への利用に妥当であると判定した場合、その一般的な情報を基にエピソード記憶部44から適切なエピソード情報を取得し、そのエピソード情報を信号生成手段42に与え、(4)信号生成手段42は制御信号を生成してロボット11に送信する。(5)その後のロボット11の行動により生成されたエピソード情報はエピソード記憶部44に記憶される。Then, (3) if the evaluation integration means 43 determines that the general information related to the request obtained from the large-
例えば、評価統合手段43がカフェオレの表現揺れにあたる物品はコーヒー牛乳であるという情報を取得した場合、コーヒー牛乳を冬にその家庭で見つけたというエピソード情報がエピソード記憶部44に存在していた場合、評価統合手段43は、大規模言語モデル45から所得した関連性のある一般的な情報が制御信号の生成への利用に妥当であるという判定を行い、該当のエピソード情報を信号生成手段42に与える。For example, if the evaluation integration means 43 acquires information that the item that corresponds to the variation of the expression café au lait is coffee milk, and episode information that coffee milk was found in the household in winter exists in the
一方、大規模言語モデル45から所得した要求に関連性のある一般的な情報が制御信号の生成への利用に妥当でないと評価統合手段43が判定した場合(例えば、コーヒー牛乳を冬にその家庭で見つけたというエピソード情報がエピソード記憶部44に記憶されていない場合)、制御装置41は利用者に所定のオブジェクトの検索先候補の入力を求める。On the other hand, if the evaluation integration means 43 determines that the general information related to the request obtained from the large-
<第3の例>
ロボット11に複数の異なる要求がなされたとして、これらの要求は内容の一部が等しく、その他の部分が異なることがある。例えば、朝、家族のために水を取ってくるという要求と、昼、来客者のために水を取ってくるという要求では、水を取ってくるという点は等しく、要求されている時間帯と誰のためにという点が相違する。これについて、評価統合手段43(即ち、制御信号生成部)は、要求の内容に応じて、制御信号の生成に必要な情報を優先的に問い合わせる先をエピソード記憶部44とするか大規模言語モデル45とするかを選択し、その選択に基づいてエピソード記憶部44又は大規模言語モデル45に問い合わせを行う。<Third Example>
If multiple different requests are made to the
以上、本発明の実施の形態を説明したが、本発明は、上記した形態に限定されるものでなく、要旨を逸脱しない条件の変更等は全て本発明の適用範囲である。
例えば、ロボット以外の処理ユニット(問い合わせに対する適切な回答を画面に表示するユニット等)を採用してもよい。Although the embodiment of the present invention has been described above, the present invention is not limited to the above-mentioned embodiment, and all changes in conditions that do not depart from the gist of the present invention are within the scope of application of the present invention.
For example, a processing unit other than a robot (such as a unit that displays an appropriate response to an inquiry on a screen) may be used.
10:要求処理システム、11:ロボット、12:制御信号生成部、13:アーム、14:自走機構、15:撮像手段、16:センサ、17:メモリ、18:制御部、19:入力部、20:制御装置、21:エピソード記憶部、22:基礎情報記憶部、23:大規模言語モデル、24:データ入出力部、25:解析部、30:要求処理システム、31:大規模言語モデル、32:制御装置、33:制御信号生成部、34:解析部、40:要求処理システム、41:制御装置、42:信号生成手段、43:評価統合手段、44:エピソード記憶部、45:大規模言語モデル10: Request processing system, 11: Robot, 12: Control signal generation unit, 13: Arm, 14: Self-propelled mechanism, 15: Imaging means, 16: Sensor, 17: Memory, 18: Control unit, 19: Input unit, 20: Control device, 21: Episode storage unit, 22: Basic information storage unit, 23: Large-scale language model, 24: Data input/output unit, 25: Analysis unit, 30: Request processing system, 31: Large-scale language model, 32: Control device, 33: Control signal generation unit, 34: Analysis unit, 40: Request processing system, 41: Control device, 42: Signal generation means, 43: Evaluation integration means, 44: Episode storage unit, 45: Large-scale language model
Claims (11)
Translated fromJapanese前記処理ユニットが検知した視覚情報、聴覚情報、臭覚情報、味覚情報及び触覚情報のいずれか1つ又は複数に位置情報及び時間情報を組み合わせて形成されるエピソード情報を記憶するエピソード記憶部と、
前記制御信号を生成する制御信号生成部とを備え、
前記制御信号生成部は、前記制御信号の生成に利用する情報を、前記エピソード記憶部が記憶している前記エピソード情報、及び、大規模言語モデルから取得する一般的な情報のいずれにするか、又は、双方とするかを選択することを特徴とする制御装置。A control device for controlling a processing unit by providing a control signal to the processing unit to cause the processing unit to perform processing in response to a request,
an episode storage unit that stores episode information formed by combining one or more of visual information, auditory information, olfactory information, taste information, and tactile information detected by the processing unit with position information and time information;
A control signal generating unit that generates the control signal,
A control device characterized in that the control signal generation unit selects whether the information to be used in generating the control signal is the episode information stored in the episode memory unit, general information obtained from a large-scale language model, or both.
前記処理ユニットが検知した視覚情報、聴覚情報、臭覚情報、味覚情報及び触覚情報のいずれか1つ又は複数に位置情報及び時間情報を組み合わせて形成されるエピソード情報を記憶するエピソード記憶部を備え、前記制御信号生成部は、前記制御信号の生成に利用する情報を、前記エピソード記憶部が記憶している前記エピソード情報、及び、大規模言語モデルから取得する一般的な情報のいずれにするか、又は、双方とするかを選択することを特徴とする要求処理システム。A request processing system having a processing unit for performing processing in response to a request and a control signal generating unit for generating a control signal for causing the processing in response to the request to be performed and providing the control signal to the processing unit,
A request processing system comprising an episode memory unit that stores episode information formed by combining one or more of visual information, auditory information, olfactory information, gustatory information, and tactile information detected by the processing unit with positional information and temporal information, and the control signal generation unit selects whether the information to be used in generating the control signal is the episode information stored in the episode memory unit or general information obtained from a large-scale language model, or both.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023170719 | 2023-09-29 | ||
| JP2023170719 | 2023-09-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2025060382Atrue JP2025060382A (en) | 2025-04-10 |
Family
ID=95289777
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024064292APendingJP2025060382A (en) | 2023-09-29 | 2024-04-11 | CONTROL DEVICE AND REQUEST PROCESSING SYSTEM COMPRISING THE SAME |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2025060382A (en) |
- 2024
- 2024-04-11JPJP2024064292Apatent/JP2025060382A/enactivePending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10992491B2 (en) | Smart home automation systems and methods | |
| US20210050013A1 (en) | Information processing device, information processing method, and program | |
| US11538477B2 (en) | Generating IoT-based notification(s) and provisioning of command(s) to cause automatic rendering of the IoT-based notification(s) by automated assistant client(s) of client device(s) | |
| EP4080349B1 (en) | Customized interface based on vocal input | |
| US10185534B2 (en) | Control method, controller, and recording medium | |
| CN109032356B (en) | Sign language control method, device and system | |
| KR101568347B1 (en) | Computing device with robotic functions and operating method for the same | |
| TWI244637B (en) | Voice control system for operating home electrical appliances | |
| JP2017506772A (en) | Intelligent device scene mode customization method and apparatus | |
| JP2017502623A (en) | Smart device control method, control apparatus, program and recording medium based on set scene mode | |
| WO2015137740A1 (en) | Home network system using robot and control method thereof | |
| CN110618614A (en) | Control method and device for smart home, storage medium and robot | |
| WO2019082630A1 (en) | Information processing device and information processing method | |
| KR20190096589A (en) | System and method for providing conversational contents | |
| CN107466404A (en) | Articles search method, apparatus and robot | |
| JP2017535084A (en) | Data communication system, method, apparatus, program, and recording medium | |
| WO2020116026A1 (en) | Response processing device, response processing method, and response processing program | |
| CN109450745A (en) | Information processing method, device, intelligence control system and intelligent gateway | |
| KR102730324B1 (en) | Method for dynamically recommending catalog and electonic device therof | |
| CN111628917A (en) | Electronic device and method for providing information by electronic device | |
| JP2025060382A (en) | CONTROL DEVICE AND REQUEST PROCESSING SYSTEM COMPRISING THE SAME | |
| KR20190043940A (en) | Electronic apparatus and service providing method thereof | |
| WO2020065410A1 (en) | Discovery of internet-of-things resources | |
| CN117971154A (en) | Multimodal response | |
| US20210056046A1 (en) | Managing connections of input and output devices in a physical room |