JP2023004052A - catheter - Google Patents
catheterDownload PDFInfo
- Publication number
- JP2023004052A JP2023004052AJP2021105518AJP2021105518AJP2023004052AJP 2023004052 AJP2023004052 AJP 2023004052AJP 2021105518 AJP2021105518 AJP 2021105518AJP 2021105518 AJP2021105518 AJP 2021105518AJP 2023004052 AJP2023004052 AJP 2023004052A
- Authority
- JP
- Japan
- Prior art keywords
- lumen
- section
- catheter
- shaft
- proximal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Landscapes
- Media Introduction/Drainage Providing Device (AREA)
Abstract
Description
Translated fromJapanese本発明は、カテーテルに関する。 The present invention relates to catheters.
慢性完全閉塞(CTO:Chronic Total Occlusion)のように、血管内が閉塞物によって閉塞されてしまう場合がある。CTO開通のための手技では、一般に、モノレールガイドワイヤを用いて、カテーテルをCTO病変の位置までデリバリした後、貫通用ガイドワイヤを用いて、貫通用ガイドワイヤを偽腔から真腔へと再入させる。なお、偽腔とは、医療デバイスにより形成された真腔以外の全ての解離腔を指す。 The inside of a blood vessel may be blocked by an obstructing material, such as chronic total occlusion (CTO). The procedure for CTO patency generally uses a monorail guidewire to deliver a catheter to the location of the CTO lesion and then uses a penetrating guidewire to reenter the penetrating guidewire from the false lumen into the true lumen. Let The false lumen refers to all dissected lumens other than the true lumen formed by a medical device.
CTO開通のための手技は複雑であることから、センサのガイド下(例えばIVUS Guide)で手技を行いたいという要望がある。例えば特許文献1,2には、センサのガイド下での手技において使用できるデバイスが開示されている。特許文献1,2のデバイスは、画像用ルーメン(イメージングコア用ルーメン)と、複数のガイドワイヤルーメンとを個別に有しており、画像用ルーメンに挿入されたセンサによる観察下で、ガイドワイヤルーメンに挿入された貫通用ガイドワイヤの操作を行うことができる。 Since the procedure for opening CTO is complicated, there is a demand to perform the procedure under the guidance of a sensor (for example, an IVUS Guide). For example,
ここで、貫通用ガイドワイヤを偽腔から真腔へと確実に再入させるためには、貫通用ガイドワイヤの先端部を、真腔がある方向(以降「リエントリ方向」とも呼ぶ)に向ける必要がある。しかし、特許文献1に記載のデバイスでは、画像用ルーメンとモノレールガイドワイヤが挿入される第1ガイドワイヤルーメンを挟んで対称に、2つのガイドワイヤルーメン(第2及び第3ガイドワイヤルーメン)が配置されている。このため、特許文献1に記載のデバイスでは、他のガイドワイヤルーメンが妨げとなって、例えば、第2ガイドワイヤルーメンに貫通用ガイドワイヤを挿入した場合には第3ガイドワイヤルーメンが妨げとなって、貫通用ガイドワイヤの先端部をリエントリ方向に向けることが困難な場合があった。 Here, in order to ensure that the penetrating guidewire reenters the true cavity from the false cavity, the tip of the penetrating guidewire is directed in the direction of the true cavity (hereinafter also referred to as the "reentry direction"). There is a need. However, in the device described in
また、特許文献2に記載のデバイスは、画像用ルーメン(イメージングコア用ルーメン)と、モノレールガイドワイヤが挿入されるガイドワイヤルーメンと、貫通用ガイドワイヤが挿入されるガイドワイヤルーメンとが1列に並んで配置されている。このため、特許文献2に記載のデバイスでは、貫通用ガイドワイヤの先端部をリエントリ方向に向けるために、手元側でなされた回転操作が先端側まで伝達されず、かつ、デバイスが偽腔内でスタックしやすいため、貫通用ガイドワイヤの先端部をリエントリ方向に向けることが容易でないという課題があった。さらに、特許文献2に記載のデバイスでは、貫通用ガイドワイヤを偽腔から真腔へと再入させる際、生体組織からの反力によってデバイスが回転してしまい、生体組織に対して、再入のために十分な力を加えられない場合があった。 In addition, the device described in
なお、このような課題は、CTOの開通に限らず、センサのガイド下での手技を実現可能なデバイスの全般に共通する。また、このような課題は、血管系に限らず、リンパ腺系、胆道系、尿路系、気道系、消化器官系、分泌腺及び生殖器官といった、生体管腔内に挿入されるデバイスの全般に共通する。 It should be noted that such a problem is not limited to the opening of the CTO, but is common to all devices capable of performing manipulations under the guidance of sensors. In addition, such problems are not limited to the vascular system, but apply to all devices inserted into biological lumens, such as the lymphatic system, the biliary system, the urinary system, the respiratory system, the digestive system, the secretory glands, and the reproductive organs. common to
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、センサのガイド下での手技を実現可能なカテーテルにおいて、貫通用ガイドワイヤの先端部を容易にリエントリ方向に向けることを可能とし、かつ、貫通用ガイドワイヤの再入時における生体組織からの反力によるデバイスの回転を抑制することを目的とする。 SUMMARY OF THE INVENTION The present invention has been made to solve at least a part of the above-described problems, and provides a catheter capable of performing a procedure under the guidance of a sensor, in which the distal end of a penetrating guide wire can be easily moved in a reentry direction. The object is to enable orientation and to suppress rotation of the device due to reaction force from living tissue upon re-entry of the penetrating guidewire.
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態として実現することが可能である。 The present invention has been made to solve at least part of the above problems, and can be implemented as the following modes.
(1)本発明の一形態によれば、シャフトを有するカテーテルが提供される。このカテーテルにおいて、前記シャフトは、第1先端と第1基端とを有し、前記シャフトの長手方向に延びる第1ルーメンと、前記第1ルーメンに隣り合って延びる第2ルーメンであって、前記第1先端よりも基端側に位置する第2先端と、前記第1基端よりも基端側に位置する第2基端とを有する第2ルーメンと、前記第1ルーメンと前記第2ルーメンの両方に隣り合って延びる第3ルーメンであって、前記第1先端及び前記第2先端よりも基端側かつ前記第1基端よりも先端側に位置する第3先端と、前記第1基端よりも基端側に位置する第3基端とを有する第3ルーメンと、を備え、前記シャフトは、先端側から基端側に向かって、前記第1ルーメンと前記第2ルーメンを含み、楕円形状の横断面を有する先端区間と、前記第1ルーメンと前記第2ルーメンと前記第3ルーメンを含み、円形状の横断面を有する中間区間と、を有している。(1) According to one aspect of the present invention, a catheter having a shaft is provided. In this catheter, the shaft has a first distal end and a first proximal end, a first lumen extending longitudinally of the shaft, and a second lumen extending adjacent to the first lumen, a second lumen having a second distal end positioned closer to the proximal side than the first distal end and a second proximal end positioned closer to the proximal side than the first proximal end; the first lumen and the second lumen a third lumen extending adjacent to both of the and located proximally of the first distal end and the second distal end and distally of the first proximal end; a third lumen having a third proximal end located more proximal than the end, wherein the shaft includes the first lumen and the second lumen from the distal side toward the proximal side; A distal section having an elliptical cross-section and an intermediate section including the first, second and third lumens and having a circular cross-section.
この構成によれば、カテーテルのシャフトは、モノレールガイドワイヤを挿入するための第1ルーメンと、画像用のセンサを挿入するための第2ルーメンと、貫通用ガイドワイヤを挿入するための第3ルーメンとを備えるため、センサのガイド下での手技を実現可能なデバイスを提供できる。また、シャフトは、第1ルーメンと第2ルーメンと第3ルーメンを含む中間区間を有し、当該中間区間の横断面は円形状である。このため、貫通用ガイドワイヤの先端部をリエントリ方向に向けるため、換言すれば第3ルーメンをリエントリ方向に向けるために、手元側(基端側)でなされた回転操作を先端側まで伝達しやすくできると共に、回転時にカテーテルが偽腔内でスタックすることを抑制できる。この結果、貫通用ガイドワイヤの先端部を容易にリエントリ方向に向けることができる。さらに、シャフトにおいて、貫通用ガイドワイヤが挿入される第3ルーメンは、モノレールガイドワイヤが挿入される第1ルーメンと、センサが挿入される第2ルーメンの両方に隣り合って延びている。このため、貫通用ガイドワイヤを含む第3ルーメンをリエントリ方向に向けた際に、リエントリ方向と逆側(換言すれば、真腔から遠い側)には、第1ルーメンと第2ルーメンとが、第3ルーメンに隣り合ってそれぞれ位置した状態となる。この結果、第3ルーメンに挿入された貫通用ガイドワイヤを偽腔から真腔へと再入させる際、生体組織からの反力を受けた場合であっても、第1ルーメンと第2ルーメンとによって第3ルーメン内の貫通用ガイドワイヤを支持することができ、反力によるカテーテルの回転を抑制できる。この結果、本構成のカテーテルを用いれば、生体組織に対して、貫通用ガイドワイヤ再入のために十分な力を加えることができる。これらの結果、本構成のカテーテルによれば、CTO開通のための手技の手間と時間を削減し、手技を効率よく進めることが可能となる。 According to this configuration, the catheter shaft has a first lumen for inserting the monorail guidewire, a second lumen for inserting the imaging sensor, and a third lumen for inserting the penetrating guidewire. and , it is possible to provide a device capable of performing a procedure under the guidance of a sensor. Also, the shaft has an intermediate section including a first lumen, a second lumen and a third lumen, and the intermediate section has a circular cross section. Therefore, in order to orient the tip of the penetrating guide wire in the reentry direction, in other words, to orient the third lumen in the reentry direction, the rotational operation performed on the proximal side (proximal side) is transmitted to the distal side. In addition, it is possible to prevent the catheter from being stuck in the false lumen during rotation. As a result, the distal end of the penetrating guidewire can be easily directed in the reentry direction. Further, in the shaft, a third lumen through which the penetrating guidewire is inserted extends adjacent to both the first lumen through which the monorail guidewire is inserted and the second lumen through which the sensor is inserted. Therefore, when the third lumen including the penetrating guide wire is directed in the reentry direction, the first and second lumens are located on the side opposite to the reentry direction (in other words, the side far from the true lumen). are positioned adjacent to the third lumen. As a result, when the penetrating guidewire inserted into the third lumen is re-entered from the false cavity into the true cavity, even if the reaction force from the living tissue is received, the first lumen and the second lumen can support the penetrating guidewire in the third lumen, and can suppress the rotation of the catheter due to the reaction force. As a result, by using the catheter of this configuration, sufficient force can be applied to the living tissue for reentry of the penetrating guidewire. As a result, according to the catheter of this configuration, it is possible to reduce the labor and time required for the procedure for opening the CTO, and to proceed with the procedure efficiently.
(2)上記形態のカテーテルにおいて、前記シャフトは、前記中間区間よりも基端側において、さらに、前記第2ルーメンと前記第3ルーメンを含み、円形状の横断面を有する基端区間を有していてもよい。
この構成によれば、シャフトは、中間区間よりも基端側において、さらに、第2ルーメンと第3ルーメンを含み、円形状の横断面を有する基端区間を有している。このため、第3ルーメンをリエントリ方向に向けるために手元側でなされた回転操作を、より一層先端側まで伝達しやすくできると共に、回転時にカテーテルが偽腔内でスタックすることをより一層抑制できる。この結果、貫通用ガイドワイヤの先端部をより容易にリエントリ方向に向けることができる。(2) In the catheter of the above aspect, the shaft further includes a proximal section having a circular cross-section, including the second lumen and the third lumen, on the proximal side of the intermediate section. may be
According to this configuration, the shaft further has a proximal section having a circular cross-section, including the second lumen and the third lumen, proximal to the intermediate section. Therefore, it is possible to more easily transmit the rotation operation performed on the proximal side in order to orient the third lumen in the reentry direction to the distal side, and further suppress the catheter from being stuck in the false lumen during rotation. . As a result, the distal end of the penetrating guidewire can be more easily directed in the reentry direction.
(3)上記形態のカテーテルにおいて、前記シャフトのうち、前記基端区間に対応する部分は、管状の補強部材により覆われていてもよい。
この構成によれば、シャフトのうち基端区間に対応する部分は、管状の補強部材により覆われているため、カテーテルのトルク伝達性を向上できる。この結果、第3ルーメンをリエントリ方向に向けるために手元側でなされた回転操作を、より一層先端側まで伝達しやすくできると共に、手元側の回転操作を正確に先端側まで伝達できる。(3) In the catheter of the above aspect, a portion of the shaft corresponding to the proximal end section may be covered with a tubular reinforcing member.
According to this configuration, the portion of the shaft corresponding to the proximal section is covered with the tubular reinforcing member, so that the torque transmissibility of the catheter can be improved. As a result, the rotation operation performed on the proximal side to turn the third lumen in the reentry direction can be more easily transmitted to the distal side, and the rotational operation on the proximal side can be accurately transmitted to the distal side.
(4)上記形態のカテーテルにおいて、前記シャフトは、前記第3ルーメンの前記第3先端に対応する位置において、前記シャフトの横断面が、先端側から基端側に向かって楕円形状から円形状に徐変する第1徐変区間を有しており、前記シャフトの外周面のうち、前記第1徐変区間には、前記第3先端と外部とを連通する楕円形状の第3先端開口が設けられていてもよい。
この構成によれば、シャフトは、第3ルーメンの第3先端に対応する位置において、シャフトの横断面が、先端側から基端側に向かって楕円形状から円形状に徐変する第1徐変区間を有している。このため、第1徐変区間においてカテーテルの剛性を徐々に変化させることができると共に、シャフトの横断面形状が急激に変化する構成と比較して、生体組織を損傷する虞を低減し、カテーテルの安全性を向上できる。また、第1徐変区間に設けられた第3先端開口は楕円形状であるため、第3先端開口から貫通用ガイドワイヤを容易に突出させることができる。(4) In the catheter of the above aspect, the shaft has a cross section that changes from an elliptical shape to a circular shape from the distal end side to the proximal end side at a position corresponding to the third distal end of the third lumen. It has a first gradually changing section that gradually changes, and an elliptical third tip opening that communicates the third tip with the outside is provided in the first gradually changing section of the outer peripheral surface of the shaft. may have been
According to this configuration, the shaft has a first gradual change in which the cross section of the shaft gradually changes from an elliptical shape to a circular shape from the distal end side to the proximal end side at the position corresponding to the third distal end of the third lumen. has an interval. Therefore, the stiffness of the catheter can be gradually changed in the first gradual change section, and compared with a configuration in which the cross-sectional shape of the shaft changes abruptly, the danger of damaging living tissue is reduced, and the It can improve safety. Further, since the third tip opening provided in the first gradually changing section is elliptical, the penetrating guide wire can be easily protruded from the third tip opening.
(5)上記形態のカテーテルにおいて、前記シャフトは、前記第1ルーメンの前記第1基端に対応する位置において、前記シャフトの横断面が、先端側から基端側に向かって円形状から楕円形状に徐変する第2徐変区間を有しており、前記シャフトの外周面のうち、前記第2徐変区間には、前記第1基端と外部とを連通する楕円形状の第1基端開口が設けられていてもよい。
この構成によれば、シャフトは、第1ルーメンの第1基端に対応する位置において、シャフトの横断面が、先端側から基端側に向かって円形状から楕円形状に徐変する第2徐変区間を有している。このため、第2徐変区間においてカテーテルの剛性を徐々に変化させることができると共に、シャフトの横断面形状が急激に変化する構成と比較して、生体組織を損傷する虞を低減し、カテーテルの安全性を向上できる。また、第2徐変区間に設けられた第1基端開口は楕円形状であるため、第1基端開口から第1ルーメン内のモノレールガイドワイヤを容易に引き出すことができる。(5) In the catheter of the above aspect, the shaft has a cross section that changes from a circular shape to an elliptical shape from the distal end side to the proximal end side at a position corresponding to the first proximal end of the first lumen. In the outer peripheral surface of the shaft, the second gradually changing section has an elliptical first proximal end that communicates the first proximal end with the outside. An opening may be provided.
According to this configuration, the shaft has a second gradual change in cross section from a circular shape to an elliptical shape from the distal end side to the proximal end side at a position corresponding to the first proximal end of the first lumen. It has variable intervals. Therefore, the stiffness of the catheter can be gradually changed in the second gradual change section, and compared with a configuration in which the cross-sectional shape of the shaft changes abruptly, the danger of damaging living tissue can be reduced, and the catheter can be It can improve safety. Further, since the first proximal opening provided in the second gradually changing section is elliptical, the monorail guidewire in the first lumen can be easily pulled out through the first proximal opening.
(6)上記形態のカテーテルにおいて、前記シャフトは、前記第2徐変区間と前記基端区間の間において、さらに、前記第2ルーメンと前記第3ルーメンを含み、楕円形状の横断面を有する接続区間を有していてもよい。
この構成によれば、シャフトは、第2徐変区間と基端区間の間において、さらに、楕円形状の横断面を有する接続区間を有しているため、接続区間がない場合と比較して、第1ルーメン内のモノレールガイドワイヤを、第1基端開口からより一層引き出しやすくできる。この結果、カテーテルの使い勝手を向上できる。(6) In the catheter of the above aspect, the shaft further includes the second lumen and the third lumen between the second gradually changing section and the proximal section, and has an elliptical cross section. It may have intervals.
According to this configuration, the shaft further has a connection section having an elliptical cross section between the second gradually changing section and the proximal section. The monorail guidewire in the first lumen can be pulled out more easily from the first proximal opening. As a result, the usability of the catheter can be improved.
なお、本発明は、種々の態様で実現することが可能であり、例えば、カテーテル、カテーテルの製造または使用方法、カテーテル、センサ、モノレールガイドワイヤ、及び貫通用ガイドワイヤを含むカテーテルシステム、カテーテルシステムの製造または使用方法などの形態で実現することができる。 It should be noted that the present invention can be embodied in a variety of ways, including catheters, methods of making or using catheters, catheter systems including catheters, sensors, monorail guidewires, and penetrating guidewires, catheter systems. It can be realized in a form such as a manufacturing method or a method of use.
<第1実施形態>
図1は、再開通カテーテルシステム1の構成を例示した説明図である。再開通カテーテルシステム1は、例えば、血管に生じたCTO(慢性完全閉塞、CTO:Chronic Total Occlusion)を順行性アプローチで治療する場合に用いられる。再開通カテーテルシステム1は、カテーテル100と、イメージングセンサ200と、イメージングコンソール300と、貫通用ガイドワイヤ400と、モノレールガイドワイヤ500と、を備えている。図1では、カテーテル100の概略側面図を表すと共に、カテーテル100に対してそれぞれ挿入された、イメージングセンサ200、貫通用ガイドワイヤ400、及びモノレールガイドワイヤ500を図示している。<First embodiment>
FIG. 1 is an explanatory diagram illustrating the configuration of a
図1では、説明の便宜上、各構成部材の大きさの相対比を実際とは異なるように記載している部分を含んでいる。また、各構成部材の一部を誇張して記載している部分を含んでいる。また、図1には、相互に直交するXYZ軸を図示する。X軸はカテーテル100の長手方向に対応し、Y軸はカテーテル100の高さ方向に対応し、Z軸はカテーテル100の幅方向に対応する。図1の左側(-X軸方向)をカテーテル100及び各構成部材の「先端側」と呼び、図1の右側(+X軸方向)をカテーテル100及び各構成部材の「基端側」と呼ぶ。また、カテーテル100及び各構成部材の長手方向(X軸方向)における両端のうち、先端側に位置する一端を「先端」と呼び、基端側に位置する他端を「基端」と呼ぶ。また、先端及びその近傍を「先端部」と呼び、基端及びその近傍を「基端部」と呼ぶ。先端側は生体内部へ挿入され、基端側は医師等の術者により操作される。これらの点は、図1以降においても共通する。 For convenience of explanation, FIG. 1 includes a portion in which the relative size ratio of each component is described as different from the actual size. In addition, it includes a portion exaggeratedly describing a part of each constituent member. In addition, FIG. 1 illustrates XYZ axes that are orthogonal to each other. The X-axis corresponds to the longitudinal direction of
図2は、カテーテル100の構成を例示した説明図である。図2では、カテーテル100のシャフト101の内部に形成されたルーメン(具体的には、第1ルーメン110L、第2ルーメン120L、及び第3ルーメン130L)を破線で表している。また、図2では、シャフト101のうち、中間区間S2の中心を通る軸線Oを一点鎖線で表している。カテーテル100は、シャフト101と、調節器150と、コネクタ160とを備えている。シャフト101は、第1ルーメン110Lと、第2ルーメン120Lと、第3ルーメン130Lとを備えている。 FIG. 2 is an explanatory diagram illustrating the configuration of the
第1ルーメン110Lは、シャフト101の長手方向(X軸方向)に沿って延びるルーメンである(図2)。図1に示すように、第1ルーメン110Lは、カテーテル100にモノレールガイドワイヤ500を挿入するための「モノレールガイドワイヤルーメン」として機能する。以降、第1ルーメン110Lの先端を「第1先端」とも呼び、第1ルーメン110Lの基端を「第1基端」とも呼ぶ。図2に示すように、シャフト101の先端部のうち、第1ルーメン110Lの第1先端に対応する位置には、第1ルーメン110Lの第1先端と外部とを連通する第1先端開口110aが形成されている。また、シャフト101の外周面のうち、第1ルーメン110Lの第1基端に対応する位置には、第1ルーメン110Lの第1基端と外部とを連通する第1基端開口110bが形成されている。第1基端開口110bは、X軸方向に長軸を有し、Z軸方向に短軸を有する楕円形状の開口である。第1基端開口110bは、第1基端開口110bの基端が、第1基端開口110bの先端と比べて第2ルーメン120Lの側に位置するように、傾斜している。 The
第2ルーメン120Lは、シャフト101の長手方向(X軸方向)に沿って、第1ルーメン110Lに隣り合って延びるルーメンである(図2)。図1に示すように、第2ルーメン120Lは、カテーテル100にイメージングセンサ200を挿入するための「センサルーメン」として機能する。以降、第2ルーメン120Lの先端を「第2先端」とも呼び、第2ルーメン120Lの基端を「第2基端」とも呼ぶ。図2に示すように、シャフト101の先端部のうち、第2ルーメン120Lの第2先端に対応する位置には、第2ルーメン120Lの第2先端と外部とを連通する第2先端開口120aが形成されている。また、シャフト101の基端部のうち、第2ルーメン120Lの第2基端に対応する位置には、第2ルーメン120Lの第2基端と外部とを連通する第2基端開口120bが形成されている。 The
図2に示すように、第2ルーメン120Lの第2先端は、第1ルーメン110Lの第1先端よりも基端側に位置している。換言すれば、第2先端開口120aは、第1先端開口110aよりも基端側に位置している。また、第2ルーメン120Lの第2基端は、第1ルーメン110Lの第1基端よりも基端側に位置している。換言すれば、第2基端開口120bは、第1基端開口110bよりも基端側に位置している。 As shown in FIG. 2, the second distal end of the
第3ルーメン130Lは、シャフト101の長手方向(X軸方向)に沿って、第1ルーメン110Lと第2ルーメン120Lの両方に隣り合って延びるルーメンである(図2)。図1に示すように、第3ルーメン130Lは、カテーテル100に貫通用ガイドワイヤ400を挿入するための「貫通用ガイドワイヤルーメン」として機能する。以降、第3ルーメン130Lの先端を「第3先端」とも呼び、第3ルーメン130Lの基端を「第3基端」とも呼ぶ。図2に示すように、シャフト101の外周面のうち、第3ルーメン130Lの第3先端に対応する位置には、第3ルーメン130Lの第3先端と外部とを連通する第3先端開口130aが形成されている。第3先端開口130aは、X軸方向に長軸を有し、Y軸方向に短軸を有する楕円形状の開口である。第3先端開口130aは、第3先端開口130aの先端が、第3先端開口130aの基端と比べて第1ルーメン110L及び第2ルーメン120Lの側に位置するように、傾斜している。また、シャフト101の基端部のうち、第3ルーメン130Lの第3基端に対応する位置には、第3ルーメン130Lの第3基端と外部とを連通する第3基端開口130bが形成されている。 The
図2に示すように、第3ルーメン130Lの第3先端は、第1ルーメン110Lの第1先端よりも基端側、かつ、第2ルーメン120Lの第2先端よりも基端側、かつ、第1ルーメン110Lの第1基端よりも先端側(すなわち、第1先端及び第2先端と、第1基端との間)に位置している。換言すれば、第3先端開口130aは、第1先端開口110aよりも基端側、かつ、第2先端開口120aよりも基端側、かつ、第1基端開口110bよりも先端側に位置している。また、第3ルーメン130Lの第3基端は、第1ルーメン110Lの第1基端よりも基端側に位置している。換言すれば、第3基端開口130bは、第1基端開口110bよりも基端側に位置している。 As shown in FIG. 2, the third distal end of the
図3、図4、及び図5は、カテーテル100の横断面図である。図3(A)は、図2のA-A線におけるシャフト101の横断面図を表す。図3(B)は、図2のB-B線におけるシャフト101の横断面図を表す。図4(A)は、図2のC-C線におけるシャフト101の横断面図を表す。図4(B)は、図2のD-D線におけるシャフト101の横断面図を表す。図5(A)は、図2のE-E線におけるシャフト101の横断面図を表す。図5(B)は、図2のF-F線におけるシャフト101の横断面図を表す。 3, 4, and 5 are cross-sectional views of
図3~図5に示すように、本実施形態のシャフト101は、第1インナーシャフト110と、第2インナーシャフト120と、第3インナーシャフト130と、封止部材102と、補強部材140とを用いて形成されている。第1インナーシャフト110、第2インナーシャフト120、及び第3インナーシャフト130は、いずれも、長尺状の外形を有する円筒形状の部材である。図4(A)に示すように、本実施形態の例では、第1インナーシャフト110の内径Φ110と、第2インナーシャフト120の内径Φ120と、第3インナーシャフト130の内径Φ130は、それぞれ等しい。また、第1インナーシャフト110の内側は、第1ルーメン110L(モノレールガイドワイヤルーメン)として機能し、第2インナーシャフト120の内側は、第2ルーメン120L(センサルーメン)として機能し、第3インナーシャフト130の内側は、第3ルーメン130L(貫通用ガイドワイヤルーメン)として機能する。 As shown in FIGS. 3 to 5, the
図2に示すように、シャフト101は、先端側から基端側に向かって、先端区間S1と、中間区間S2と、基端区間S3とを有している。なお、本実施形態では、カテーテル100の長手方向(X軸方向)に沿った任意の範囲を「区間」と呼ぶ。図2に示す本実施形態では、先端区間S1と、中間区間S2と、基端区間S3とは隣接していない。この点についての詳細は、後述する。 As shown in FIG. 2, the
先端区間S1は、シャフト101内に、第1ルーメン110Lと第2ルーメン120Lとを含む区間である。図3(A)のA-A断面に示すように、先端区間S1において、シャフト101は楕円形状の横断面を有している。具体的には、先端区間S1では、隣接して配置された第1インナーシャフト110と第2インナーシャフト120とが、第1及び第2インナーシャフト110,120の外周面側に配置された封止部材102により固定されている。また、先端区間S1では、封止部材102の外形が、楕円形状の横断面になるように成形されている。なお、本実施形態において「楕円形状」とは、軸線(長軸、または短軸)に対して完全に対称な楕円形状だけでなく、非対称な一部分を有する略楕円形状を含み得る意味である。 The tip section S1 is a section within the
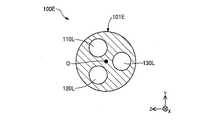
中間区間S2は、シャフト101内に、第1ルーメン110L、第2ルーメン120L、及び第3ルーメン130Lを含む区間である。図4(A)のC-C断面に示すように、中間区間S2において、シャフト101は円形状の横断面を有している。具体的には、中間区間S2では、それぞれ隣接して配置された第1インナーシャフト110、第2インナーシャフト120、及び第3インナーシャフト130が、第1~第3インナーシャフト110,120,130の外周面側に配置された封止部材102により固定されている。また、中間区間S2では、封止部材102の外形が、円形状の横断面になるように成形されている。なお、本実施形態において「円形状」とは、軸線に対して完全に対称な円形状だけでなく、非対称な一部分を有する略円形状を含み得る意味である。 The intermediate section S2 is a section that includes the
基端区間S3は、シャフト101内に、第2ルーメン120Lと第3ルーメン130Lとを含む区間である。図5(B)のF-F断面に示すように、基端区間S3において、シャフト101は円形状の横断面を有している。具体的には、基端区間S3では、補強部材140の内側(ルーメン140L)に、第2インナーシャフト120と第3インナーシャフト130とが隣接した状態で収容されている。図2に示すように、補強部材140は、テーパ部141と、本体部142とを有する管状の部材である。テーパ部141は、補強部材140の先端部に設けられており、先端側から基端側に向かって外径が徐々に拡径した部分である。本体部142は、略一定の外形を有する部分である。図5(B)に示すように、本実施形態の補強部材140は、樹脂製の管状体に、素線を網目織りにしたメッシュ形状のブレード143が埋設された構成である。なお、図5(B)に示すように、補強部材140の中心は、シャフト101の中間区間S2の中心を通る軸線Oとは一致していない。しかし、補強部材140の中心と、シャフト101の中間区間S2の中心を通る軸線Oとは、一致させてもよい。また、図示の例では、ルーメン140Lには何も充填されていないが、例えば、ルーメン140Lには封止部材102が充填されていてもよい。 The proximal section S3 is a section that includes the
図2に戻り、説明を続ける。シャフト101は、先端区間S1と中間区間S2との間であって、第3ルーメン130Lの第3先端開口130aに対応する位置に、第1徐変区間S11を有している。また、シャフト101は、中間区間S2と基端区間S3との間であって、第1ルーメン110Lの第1基端開口110bに対応する位置に、第2徐変区間S12を有している。さらに、シャフト101は、第2徐変区間S12と基端区間S3との間に、接続区間S13を有している。 Returning to FIG. 2, the description is continued. The
第1徐変区間S11は、第3先端開口130aに対応する位置、すなわち、第3ルーメン130Lの第3先端に対応する位置に設けられた区間である。図3(B)のB-B断面に示すように、第1徐変区間S11では、シャフト101の横断面形状が、先端側から基端側に向かって、楕円形状から円形状に徐変していく。換言すれば、第1徐変区間S11のシャフト101の横断面形状は、先端側では図3(A)に示す楕円形状により近い形状となり、基端側では図4(A)に示す円形状により近い形状となる。図3(B)に示すように、第1徐変区間S11では、第1インナーシャフト110、第2インナーシャフト120、及び第3インナーシャフト130が隣接して配置されている。また、第3インナーシャフト130の先端部のうち、第1及び第2インナーシャフト110,120と接触していない外側部分が斜めにカットされている。この状態で、第1インナーシャフト110、第2インナーシャフト120、及び第3インナーシャフト130は、外周面側に配置された封止部材102により固定されている。 The first gradually changing section S11 is a section provided at a position corresponding to the
第2徐変区間S12は、第1基端開口110bに対応する位置、すなわち、第1ルーメン110Lの第1基端に対応する位置に設けられた区間である。図4(B)のD-D断面に示すように、第2徐変区間S12では、シャフト101の横断面形状が、先端側から基端側に向かって、円形状から楕円形状に徐変していく。換言すれば、第2徐変区間S12のシャフト101の横断面形状は、先端側では図4(A)に示す円形状により近い形状となり、基端側では図5(A)に示す楕円形状により近い形状となる。図4(B)に示すように、第2徐変区間S12では、第1インナーシャフト110、第2インナーシャフト120、及び第3インナーシャフト130が隣接して配置されている。また、第1インナーシャフト110の先端部のうち、第2及び第3インナーシャフト120,130と接触していない外側部分が斜めにカットされている。この状態で、第1インナーシャフト110、第2インナーシャフト120、及び第3インナーシャフト130は、外周面側に配置された封止部材102により固定されている。 The second gradually changing section S12 is a section provided at a position corresponding to the first base end opening 110b, that is, a position corresponding to the first base end of the
接続区間S13は、第2徐変区間S12と基端区間S3との間に設けられており、シャフト101内に、第2ルーメン120Lと第3ルーメン130Lとを含む区間である。図5(A)のE-E断面に示すように、接続区間S13において、シャフト101は楕円形状の横断面を有している。具体的には、接続区間S13では、隣接して配置された第2インナーシャフト120と第3インナーシャフト130とが、第2,3インナーシャフト120,130の外周面側に配置された封止部材102により固定されている。また、接続区間S13では、封止部材102の外形が、楕円形状の横断面になるように成形されている。 The connection section S13 is provided between the second gradually changing section S12 and the proximal section S3, and is a section that includes the
図2に戻り、説明を続ける。シャフト101のうち、先端区間S1よりも先端側には、シャフト101内に第1ルーメン110Lのみを含む突出部101pが形成されている。突出部101pの先端側の一部分には、突出部101pの周囲を取り囲むようにして、先端チップ103が接合されている。先端チップ103は、先端側に向かって外径が縮径した筒状の部材である。なお、先端チップ103は任意の形状とできる。先端チップ103は、視認性を向上させるために着色されていてもよく、放射線不透過性を有する材料により形成されていてもよい。先端チップ103とシャフト101との接合には、例えば、熱溶融による樹脂同士の接合や、エポキシ系接着剤などの絶縁性の接着剤による接合を採用できる。 Returning to FIG. 2, the description is continued. A projecting
シャフト101の外周面のうち、先端区間S1の基端部(換言すれば、第3先端開口130aよりも先端側の一部分)には、マーカー104が接合されている。マーカー104は、シャフト101の外周面に沿った半円形状の部材である。マーカー104は、視認性を向上させるために着色されていてもよく、放射線不透過性を有する材料により形成されていてもよい。マーカー104とシャフト101との接合には、例えば、熱溶融による樹脂同士の接合や、エポキシ系接着剤などの絶縁性の接着剤による接合を採用できる。 A
シャフト101のうち、基端区間S3よりも基端側では、シャフト101が二股に分岐している。分岐したシャフト101のうち、一方は第3ルーメン130Lを含む第3インナーシャフト130であり、他方は第2ルーメン120Lを含む第2インナーシャフト120である。なお、基端区間S3よりも基端側では、第2インナーシャフト120と第3インナーシャフト130との少なくとも一方は、補強のための別途の管状体により覆われていてもよい。 The
第3インナーシャフト130の基端部には、中空のコネクタ160が固定されている。コネクタ160は、一対の羽根部を有し、術者によって把持される部材である。図2に示すように、コネクタ160の基端側の開口が、上述した第3基端開口130bに相当する。第2インナーシャフト120の基端部には、調節器150が固定されている。調節器150は、第2ルーメン120Lにおけるイメージングセンサ200の前進後退を行うための操作部である。調節器150は、術者が操作可能なダイヤルを備えており、ダイヤルを回転させることで、第2ルーメン120Lに挿入されたイメージングセンサ200が、前進、または後退可能に構成されている。図2に示すように、調節器150の基端側の開口が、上述した第2基端開口120bに相当する。 A
第1インナーシャフト110、第2インナーシャフト120、第3インナーシャフト130、封止部材102、補強部材140のブレード143を除く肉厚部、コネクタ160、及び調節器150は、例えば、ポリアミドなどのナイロン樹脂、ポリエチレン、ポリプロピレン、エチレン-プロピレン共重合体などのポリオレフィン、ポリエチレンテレフタラートなどのポリエステル、ポリ塩化ビニル、エチレン-酢酸ビニル共重合体、架橋型エチレン-酢酸ビニル共重合体、ポリウレタンなどの熱可塑性樹脂、ポリアミドエラストマー、ポリオレフィンエラストマー、ポリウレタンエラストマー、シリコーンゴム、ラテックスゴム等の公知の材料により形成され得る。第1インナーシャフト110、第2インナーシャフト120、第3インナーシャフト130、封止部材102、補強部材140のブレード143を除く肉厚部、コネクタ160、及び調節器150は、同一の材料で形成されていてもよく、少なくとも一部、または全部が、他とは異なる材料により形成されていてもよい。なお、第1インナーシャフト110、第2インナーシャフト120、第3インナーシャフト130、及び封止部材102について、少なくとも第3先端開口130aの近傍に位置する一部分については、生体組織との音響インピーダンスの差が小さい樹脂、例えば、ポリエチレンで形成されることが好ましい。これは、イメージングセンサ200から生体組織に向けて発信される超音波を阻害しないためである。 The first
先端チップ103及びマーカー104は、柔軟性を有する樹脂材料、例えば、ポリウレタンエラストマーで形成できる。先端チップ103及びマーカー104は、放射線不透過性を有する樹脂材料や金属材料により形成してもよい。例えば、放射線不透過性の樹脂材料を用いる場合、ポリアミド樹脂、ポリオレフィン樹脂、ポリエステル樹脂、ポリウレタン樹脂、シリコン樹脂、フッ素樹脂等に対して、三酸化ビスマス、タングステン、硫酸バリウム等の放射線不透過材料を混ぜて形成できる。例えば、放射線不透過性の金属材料を用いる場合、金、白金、タングステン、またはこれらの元素を含む合金(例えば、白金ニッケル合金)等で形成できる。先端チップ103及びマーカー104は、同一の材料で形成されていてもよく、異なる材料により形成されていてもよい。 The
図6は、イメージングセンサ200の概略図である。イメージングセンサ200は、長尺状の外形を有し、生体組織の情報を取得する「センサ」である。イメージングセンサ200は、トランスデューサ201と、ドライビングケーブル202と、コネクタ203と、モータドライブ204とを有している。トランスデューサ201は、生体組織に向けて超音波を発信し、生体組織を伝搬して反射した超音波を受信する超音波探触子(超音波振動子、圧電体、超音波送受信素子、超音波素子とも呼ばれる)を備えている。ドライビングケーブル202はその内側に、トランスデューサ201とモータドライブ204とを電気的に接続する同軸線を有する。コネクタ203は、ドライビングケーブル202の同軸線とトランスデューサ201の回転を制御するモータドライブ204とを接続する。なお、モータドライブ204はケーブル50によりイメージングコンソール300と電気的に接続されている。 FIG. 6 is a schematic diagram of
図1に示すイメージングコンソール300は、イメージングセンサ200を制御すると共に、画像を生成し、表示する。具体的には、イメージングコンソール300は、調節器150の操作に応じて、第2ルーメン120L内のトランスデューサ201を、シャフト101の長手方向(X軸方向)に移動させ、また、シャフト101の周方向(YZ軸方向)に回転させる。また、イメージングコンソール300は、図示しない入力手段を介した術者の操作に応じて、トランスデューサ201から超音波を発信し、トランスデューサ201によって反射波を受信させる。トランスデューサ201が受信した反射波は、ドライビングケーブル202及びケーブル50を介して、イメージングコンソール300に送信される。イメージングコンソール300は、受信した反射波の強度に応じた濃淡の諧調を付した画像(2次元画像)を生成し、生成した画像をディスプレイ302に表示させる。以降、イメージングセンサ200により取得され、ディスプレイ302に表示された画像を「センサ画像」とも呼ぶ。
図1に示す貫通用ガイドワイヤ400は、先端に尖状部401を有する長尺な医療デバイスである。尖状部401は、基端側から先端側に向かって、やじり形状或いは楔形状とされた部分である。貫通用ガイドワイヤ400は、先端に設けられた尖状部401によって、生体組織を貫通することができる。貫通用ガイドワイヤ400は「生体組織を貫通するガイドワイヤ」に相当する。図1に示すモノレールガイドワイヤ500は、血管にカテーテル100を挿入する際に用いられる長尺な医療デバイスである。モノレールガイドワイヤ500は、単に「ガイドワイヤ」とも呼ばれる。なお、図示の例では、貫通用ガイドワイヤ400のうち、カテーテル100の外側に露出した一部分には、トルカー402が取り付けられている。トルカー402は、術者によるデバイスの把持及び回転操作を容易にするための器具である。トルカー402は、モノレールガイドワイヤ500に対して取り付けられてもよく、省略されてもよい。 A penetrating
図7及び図8は、再開通カテーテルシステム1の使用方法について説明する図である。図7及び図8では、生体管腔の一例としての冠動脈80と、冠動脈80に発生したCTO81と、冠動脈80の内膜または内膜下に形成された偽腔82(モノレールガイドワイヤ500により形成された真腔以外の全ての解離腔)と、真腔84と、偽腔82と真腔84との間に存在する線維性皮膜またはプラーク83(以下「線維性皮膜83」とも呼ぶ)と、をそれぞれ示す。線維性皮膜83は、CTO病変の表面に繊維状に形成されることがある。なお、図8では、カテーテル100の内側に挿入されているイメージングセンサ200及び貫通用ガイドワイヤ400を破線で図示する。 FIGS. 7 and 8 are diagrams explaining how to use the
図7(A)は、冠動脈80にモノレールガイドワイヤ500を挿入した様子を示す。図7(A)では、術者が操作するモノレールガイドワイヤ500が、冠動脈80の内膜に迷入し、あるいは内膜下で偽腔82を形成している。 FIG. 7A shows how the monorail guidewire 500 is inserted into the
図7(B)は、モノレールガイドワイヤ500を用いてカテーテル100をデリバリする様子を示す。術者は、患者の体外において、モノレールガイドワイヤ500の基端部を、カテーテル100の第1先端開口110aから第1ルーメン110L内に挿入する。術者は、第1ルーメン110L内部において、モノレールガイドワイヤ500を基端側に押し進め、モノレールガイドワイヤ500の基端部を、カテーテル100の第1基端開口110bから外部へと引き出す。このように、第1基端開口110bは、いわゆるラピッドエクスチェンジ型のカテーテルの「ポート」として機能するため、第1ルーメン110L内においてモノレールガイドワイヤ500を送り出す距離を短くできる。その後、術者は、図7(B)に示すように、モノレールガイドワイヤ500に沿わせて、カテーテル100を偽腔82までデリバリする。 FIG. 7B shows delivery of
図8(A)は、カテーテル100及びイメージングセンサ200の位置を調整する様子を示す。術者は、次のa1~a3に示す各位置の調整を行う。
(a1)カテーテル100の長手方向(図1:X軸方向)における位置の調整。術者は、カテーテル100を冠動脈80に沿って移動させることで、カテーテル100の第3先端開口130aを、貫通用ガイドワイヤ400による真腔84への穿通のために最適な位置に配置する。調整a1は、センサ画像上の冠動脈80の位置、または、X線画像上のマーカー104の位置を確認しつつ、実施できる。
(a2)カテーテル100の周方向(図1:YZ軸方向)における向きの調整。術者は、カテーテル100を周方向に回転させることで、カテーテル100が、図示の向き(すなわち、第3先端開口130aが、CTO81側に位置する向き)となるよう調整する。調整a2は、センサ画像上のモノレールガイドワイヤ500と冠動脈80との位置関係を確認しつつ、実施できる。
(a3)イメージングセンサ200のトランスデューサ201についての、長手方向(図1:X軸方向)における位置の調整。術者は、調節器150を操作することで、トランスデューサ201が、貫通用ガイドワイヤ400の穿通を観察するために適した位置となるよう、トランスデューサ201を移動させる。調整a3は、センサ画像上の冠動脈80を確認しつつ、実施できる。FIG. 8A shows how the positions of the
(a1) Adjusting the position of the
(a2) Adjusting the orientation of the
(a3) Adjusting the position of the
図8(B)は、貫通用ガイドワイヤ400で生体組織を貫通する様子を示す。術者は、カテーテル100のコネクタ160を把持して、貫通用ガイドワイヤ400の先端部を、カテーテル100の第3基端開口130bから第3ルーメン130L内に挿入する。術者は、第3ルーメン130L内部において、貫通用ガイドワイヤ400を先端側に押し進める。術者は、センサ画像上の貫通用ガイドワイヤ400の先端部(尖状部401)の位置を確認しつつ、尖状部401を、上述した穿通の至適部位に誘導する。その後、術者は、貫通用ガイドワイヤ400の尖状部401を用いてCTO81(生体組織)を貫通し、貫通用ガイドワイヤ400の先端部を真腔84に到達させる。 FIG. 8B shows how the penetrating
このような方法により、再開通カテーテルシステム1によるCTO81の開通が可能となる。なお、上述した方法はあくまで一例であり、再開通カテーテルシステム1は、種々の手技で使用できる。例えば、再開通カテーテルシステム1は、偽腔82から真腔84へのアプローチに限らず、近位側の真腔84から遠位側の真腔84へのCTOを貫通するアプローチを行う際に使用されてもよい。 Such a method allows the
図9は、図8(B)のG-G線におけるカテーテル100及びCTO81の横断面図である。図9を用いて、本実施形態のカテーテル100の効果例について説明する。図8(A)で説明した調整a1~a3(特に調整a2)の結果、カテーテル100は、貫通用ガイドワイヤ400を含む第3ルーメン130Lを、リエントリ方向(真腔84がある方向)に向けた状態とされる。この時、図9に示すように、リエントリ方向と逆側(換言すれば、真腔84から遠い側)には、第1ルーメン110Lと第2ルーメン120Lとが、第3ルーメン130Lに隣り合ってそれぞれ位置した状態となる。この状態で、図8(B)で説明したように、貫通用ガイドワイヤ400の尖状部401を用いてCTO81を貫通する。ここで、CTO81を貫通する際、貫通用ガイドワイヤ400には、CTO81(生体組織)からの反力が加わる。しかし、本実施形態のカテーテル100では、図9に示すように、第1ルーメン110Lと第2ルーメン120L、及び、第1ルーメン110L内のモノレールガイドワイヤ500と第2ルーメン120L内のイメージングセンサ200によって、第3ルーメン130L内の貫通用ガイドワイヤ400を支持することができる。換言すると、図8(B)のG-G線におけるカテーテル100及びCTO81の横断面において、貫通用ガイドワイヤ400は、CTO81の反対側に位置する両側の2箇所において、第1ルーメン110Lと第2ルーメン120L、及び、第1ルーメン110L内のモノレールガイドワイヤ500と第2ルーメン120L内のイメージングセンサ200によって、支持されている。このため、CTO81からの反力によるカテーテル100の回転を抑制することができると共に、貫通用ガイドワイヤ400に対して、CTO81を貫通し、真腔84へと貫通用ガイドワイヤ400を再入させるために十分な力を加えることができる。 FIG. 9 is a cross-sectional view of
図10は、比較例のカテーテル100x及びCTO81の横断面図である。比較例のカテーテル100xは、上述した第1インナーシャフト110を有していない。比較例のカテーテル100xは、第1ルーメン110Lと第3ルーメン130Lとが個別に存在せず、第3インナーシャフト130の内側が、第1ルーメン110L(モノレールガイドワイヤルーメン)の機能と、第3ルーメン130L(貫通用ガイドワイヤルーメン)の機能とを果たす。比較例のカテーテル100xの場合、術者は、カテーテル100xの第3ルーメン130Lに対してモノレールガイドワイヤ500を挿入した状態で、カテーテル100xをデリバリする。そして術者は、図8(A)で説明した方法を用いてカテーテル100xの位置を調整した後、第3ルーメン130Lからモノレールガイドワイヤ500を抜去する。その後、術者は、カテーテル100xの第3ルーメン130Lに対して貫通用ガイドワイヤ400を挿入する。 FIG. 10 is a cross-sectional view of
図10(A)は、貫通用ガイドワイヤ400を含む第3ルーメン130Lを、リエントリ方向(真腔84がある方向)に向けた状態を示す。この時、リエントリ方向と逆側(真腔84から遠い側)には、第2ルーメン120Lのみが位置した状態となる。この状態で、貫通用ガイドワイヤ400の尖状部401を用いてCTO81を貫通する操作を行う。すると、貫通用ガイドワイヤ400がCTO81(生体組織)からの反力を受けることによって、図10(B)に示すように、カテーテル100xが周方向に回転してしまう。これは、図9で説明した本実施形態のカテーテル100と比べて、比較例のカテーテル100xでは、第3ルーメン130L内の貫通用ガイドワイヤ400が、十分な支持力を得られないことに起因する。換言すると、貫通用ガイドワイヤ400は、CTO81の反対側に位置する1箇所のみでしか支持されていないことに起因する。なお、図10(B)は、カテーテル100xが反力により回転する様子を図示している。 FIG. 10A shows a state in which the
以上のように、第1実施形態の再開通カテーテルシステム1によれば、カテーテル100のシャフト101は、モノレールガイドワイヤ500を挿入するための第1ルーメン110Lと、画像用のイメージングセンサ200を挿入するための第2ルーメン120Lと、貫通用ガイドワイヤ400を挿入するための第3ルーメン130Lとを備えるため、イメージングセンサ200のガイド下での手技を実現可能なデバイス(カテーテル100)を提供できる。また、図4(A)に示すように、シャフト101は、第1ルーメン110Lと第2ルーメン120Lと第3ルーメン130Lを含む中間区間S2を有し、当該中間区間S2の横断面は円形状である。このため、上述した調整a2において、貫通用ガイドワイヤ400の尖状部401(先端部)をリエントリ方向に向けるため、換言すれば第3ルーメン130Lをリエントリ方向に向けるために、手元側(基端側)でなされた回転操作を先端側まで伝達しやすくできると共に、回転時にカテーテル100が偽腔82内でスタックすることを抑制できる。この結果、貫通用ガイドワイヤ400の尖状部401を容易にリエントリ方向に向けることができる。さらに、シャフト101において、貫通用ガイドワイヤ400が挿入される第3ルーメン130Lは、モノレールガイドワイヤ500が挿入される第1ルーメン110Lと、イメージングセンサ200が挿入される第2ルーメン120Lの両方に隣り合って延びている。このため、図9に示すように、貫通用ガイドワイヤ400を含む第3ルーメン130Lをリエントリ方向に向けた際に、リエントリ方向と逆側(換言すれば、真腔84から遠い側)には、第1ルーメン110Lと第2ルーメン120Lとが、第3ルーメン130Lに隣り合ってそれぞれ位置した状態となる。この結果、第3ルーメン130Lに挿入された貫通用ガイドワイヤ400を偽腔82から真腔84へと再入させる際、生体組織(CTO81)からの反力を受けた場合であっても、第1ルーメン110Lと第2ルーメン120Lとによって第3ルーメン130L内の貫通用ガイドワイヤ400を支持することができ、反力によるカテーテル100の回転を抑制できる。この結果、第1実施形態のカテーテル100を用いれば、生体組織に対して、貫通用ガイドワイヤ400再入のために十分な力を加えることができる。これらの結果、第1実施形態のカテーテル100によれば、CTO開通のための手技の手間と時間を削減し、手技を効率よく進めることが可能となる。 As described above, according to the
また、第1実施形態のカテーテル100によれば、シャフト101は、図5(B)に示すように、中間区間S2よりも基端側においてさらに、第2ルーメン120Lと第3ルーメン130Lを含み、円形状の横断面を有する基端区間S3を有している。このため、第3ルーメン130Lをリエントリ方向に向けるために手元側でなされた回転操作を、より一層先端側まで伝達しやすくできると共に、回転時にカテーテル100が偽腔82内でスタックすることをより一層抑制できる。この結果、貫通用ガイドワイヤ400の尖状部401(先端部)をより容易にリエントリ方向に向けることができる。 Further, according to the
さらに、第1実施形態のカテーテル100によれば、シャフト101のうち基端区間S3に対応する部分は、図5(B)に示すように、管状の補強部材140により覆われている。このため、カテーテル100のトルク伝達性を向上できる。この結果、第3ルーメン130Lをリエントリ方向に向けるために手元側でなされた回転操作を、より一層先端側まで伝達しやすくできると共に、手元側の回転操作を正確に先端側まで伝達できる。 Furthermore, according to the
さらに、第1実施形態のカテーテル100によれば、シャフト101は、図3(B)に示すように、第3ルーメン130Lの第3先端に対応する位置において、シャフト101の横断面が、先端側から基端側に向かって楕円形状から円形状に徐変する第1徐変区間S11を有している。このため、第1徐変区間S11においてカテーテル100の剛性を徐々に変化させることができると共に、シャフトの横断面形状が急激に変化する構成と比較して、生体組織を損傷する虞を低減し、カテーテル100の安全性を向上できる。また、第1徐変区間S11に設けられた第3先端開口130aは楕円形状である(図1)ため、第3先端開口130aから貫通用ガイドワイヤ400を容易に突出させることができる。 Furthermore, according to the
さらに、第1実施形態のカテーテル100によれば、シャフト101は、図4(B)に示すように、第1ルーメン110Lの第1基端に対応する位置において、シャフト101の横断面が、先端側から基端側に向かって円形状から楕円形状に徐変する第2徐変区間S12を有している。このため、第2徐変区間S12においてカテーテル100の剛性を徐々に変化させることができると共に、シャフトの横断面形状が急激に変化する構成と比較して、生体組織を損傷する虞を低減し、カテーテル100の安全性を向上できる。また、第2徐変区間S12に設けられた第1基端開口110bは楕円形状である(図1)ため、第1基端開口110bから第1ルーメン110L内のモノレールガイドワイヤ500を容易に引き出すことができる(図7)。 Furthermore, according to the
さらに、第1実施形態のカテーテル100によれば、シャフト101は、図5(A)に示すように、第2徐変区間S12と基端区間S3の間において、さらに、楕円形状の横断面を有する接続区間S13を有しているため、接続区間S13がない場合と比較して、第1ルーメン110L内のモノレールガイドワイヤ500を、第1基端開口110bからより一層引き出しやすくできる。この結果、カテーテル100の使い勝手を向上できる。 Furthermore, according to the
<第2実施形態>
図11は、第2実施形態のカテーテル100Aの構成を例示した説明図である。第2実施形態では、第1徐変区間S11と第2徐変区間S12とを有さず、先端区間S1と中間区間S2とが隣り合う例について説明する。第2実施形態の再開通カテーテルシステム1は、第1実施形態で説明したカテーテル100に代えて、図11に示すカテーテル100Aを備える。カテーテル100Aのシャフト101Aは、第1実施形態で説明した第1徐変区間S11と第2徐変区間S12とを有していない。<Second embodiment>
FIG. 11 is an explanatory diagram illustrating the configuration of the
具体的には、シャフト101Aにおいて、第1インナーシャフト110(図3,図4)の第1基端は、X軸に垂直にカットされており、第1基端開口110bAは、円形状の横断面を有している。同様に、第3インナーシャフト130(図3~図5)の第3先端は、X軸に垂直にカットされており、第3先端開口130aAは、円形状の横断面を有している。この結果、シャフト101Aは、第3先端開口130aAがある位置を基準として、先端側に先端区間S1を有し、基端側に中間区間S2を有する構成となる。換言すれば、第3先端開口130aAがある位置を基準として、シャフト101Aの横断面形状は、楕円形から円形に変化する。同様に、シャフト101Aは、第1基端開口110bAがある位置を基準として、先端側に中間区間S2を有し、基端側に接続区間S13を有する構成となる。換言すれば、第1基端開口110bAがある位置を基準として、シャフト101Aの横断面形状は、円形から楕円形に変化する。 Specifically, in
このように、シャフト101Aの構成は種々の変更が可能であり、シャフト101Aの形状が徐変する区間(第1徐変区間S11、第2徐変区間S12)を有していなくてもよい。なお、シャフト101Aは、第1徐変区間S11と、第2徐変区間S12とのいずれか一方を有さない構成とされてもよい。また、シャフト101Aはさらに、接続区間S13を有さない構成とされてもよい。この場合、補強部材140の先端部を、第1基端開口110bAの位置に配置すればよい。以上のような第2実施形態のカテーテル100Aにおいても、上述した第1実施形態と同様の効果を奏することができる。 In this way, the configuration of the
<第3実施形態>
図12は、第3実施形態のカテーテル100Bの構成を例示した説明図である。第3実施形態では、基端区間S3を有さない例について説明する。第3実施形態の再開通カテーテルシステム1は、第1実施形態で説明したカテーテル100に代えて、図12に示すカテーテル100Bを備える。カテーテル100Bのシャフト101Bは、図12に示すように、第1実施形態で説明した補強部材140を備えておらず、第1基端開口110bよりも基端側、かつ、シャフト101Bの分岐部分よりも先端側は全て、楕円形状の横断面を有する接続区間S13である。<Third Embodiment>
FIG. 12 is an explanatory diagram illustrating the configuration of the
このように、シャフト101Bの構成は種々の変更が可能であり、シャフト101Bの基端側において、円形状の横断面を有する区間(基端区間S3)を有していなくてもよい。以上のような第3実施形態のカテーテル100Bにおいても、上述した第1実施形態と同様の効果を奏することができる。 In this way, the configuration of the
<第4実施形態>
図13は、第4実施形態のカテーテル100Cの基端区間S3の横断面構成を例示した説明図である。第4実施形態では、補強部材140Cの構成が異なる例について説明する。第4実施形態の再開通カテーテルシステム1は、第1実施形態で説明したカテーテル100に代えて、図13に示すカテーテル100Cを備える。カテーテル100Cのシャフト101Cは、図5(B)で説明した補強部材140に代えて、図13に示す補強部材140Cを備える。補強部材140Cは、ブレード143が埋設されていない。補強部材140Cは、高剛性を有する樹脂(例えばPEEK)や、金属により形成されることが好ましい。<Fourth Embodiment>
FIG. 13 is an explanatory diagram illustrating the cross-sectional configuration of the proximal section S3 of the
このように、シャフト101Cの構成は種々の変更が可能であり、補強部材140Cの構成は種々の変更が可能である。例えば、補強部材140Cは、上述のようにブレード143を有さない構成とされてもよい。また、補強部材140C第1実施形態で説明したテーパ部141を有していなくてもよく、全体がテーパ形状とされてもよい。以上のような第4実施形態のカテーテル100Cにおいても、上述した第1実施形態と同様の効果を奏することができる。 In this way, various changes are possible for the structure of the
<第5実施形態>
図14は、第5実施形態のカテーテル100Dの中間区間S2の横断面構成を例示した説明図である。第5実施形態では、第1ルーメン110L、第2ルーメン120L、及び第3ルーメン130Lの内径が相違する例について説明する。第5実施形態の再開通カテーテルシステム1は、第1実施形態で説明したカテーテル100に代えて、図14に示すカテーテル100Dを備える。カテーテル100Dのシャフト101Dは、第1インナーシャフト110に代えて第1インナーシャフト110Dを用い、第3インナーシャフト130に代えて第3インナーシャフト130Dを用いて形成されている。本実施形態の例では、第1インナーシャフト110Dの内径Φ110Dは、第3インナーシャフト130Dの内径Φ130Dよりも小さい。また、第3インナーシャフト130Dの内径Φ130Dは、第2インナーシャフト120の内径Φ120よりも小さい(Φ110D<Φ130D<Φ120)。<Fifth Embodiment>
FIG. 14 is an explanatory diagram illustrating the cross-sectional configuration of the intermediate section S2 of the
このように、シャフト101Dの構成は種々の変更が可能であり、シャフト101Dが備える、第1ルーメン110L、第2ルーメン120L、及び第3ルーメン130Lの内径Φ110D,Φ120,Φ130Dは、それぞれ相違してもよい。図14では、Φ110D<Φ130D<Φ120である場合について例示したが、これらの大小関係は、挿入されるデバイスの外径に応じて適宜に決定されてよい。以上のような第5実施形態のカテーテル100Dにおいても、上述した第1実施形態と同様の効果を奏することができる。また、第5実施形態のカテーテル100Dでは、挿入されるデバイスの外径に応じて第1~第3ルーメン110L~130Lの内径Φ110D,Φ120,Φ130Dを決定できるため、カテーテル100Dを細径化できる。 In this way, the structure of the
<第6実施形態>
図15は、第6実施形態のカテーテル100Eの中間区間S2の横断面構成を例示した説明図である。第6実施形態では、インナーシャフトを用いずにシャフト101Eを構成する例について説明する。第6実施形態の再開通カテーテルシステム1は、第1実施形態で説明したカテーテル100に代えて、図15に示すカテーテル100Eを備える。カテーテル100Eのシャフト101Eは、第1実施形態で説明した第1インナーシャフト110、第2インナーシャフト120、第3インナーシャフト130、補強部材140、及び封止部材102を有しておらず、単一のシャフト101Eにより構成されている。シャフト101Eは、単一の部材により構成されている点を除いて、第1実施形態で説明したシャフト101と同様の構成を有する。すなわち、シャフト101Eは、第1実施形態で説明した第1ルーメン110L、第2ルーメン120L、第3ルーメン130L、先端区間S1、中間区間S2、基端区間S3、第1徐変区間S11、第2徐変区間S12、及び接続区間S13を有している。<Sixth embodiment>
FIG. 15 is an explanatory diagram illustrating the cross-sectional configuration of the intermediate section S2 of the
このように、カテーテル100Eの構成は種々の変更が可能であり、単一のシャフト101Eにより構成されてもよい。以上のような第6実施形態のカテーテル100Eにおいても、上述した第1実施形態と同様の効果を奏することができる。 Thus, the configuration of
<本実施形態の変形例>
本発明は上記の実施形態に限られるものではなく、その要旨を逸脱しない範囲において種々の態様において実施することが可能であり、例えば次のような変形も可能である。<Modification of this embodiment>
The present invention is not limited to the above-described embodiments, and can be implemented in various aspects without departing from the scope of the invention. For example, the following modifications are possible.
[変形例1]
上記第1~第6実施形態では、再開通カテーテルシステム1の構成の一例を示した。しかし、再開通カテーテルシステム1の構成は種々の変更が可能である。例えば、イメージングセンサ200として、超音波の発進及び受信以外の他の手段で生体組織の画像を取得するセンサを利用してもよい。また、イメージングセンサ200に替えてOCT(Optical Coherence Tomography)やカメラを挿入して血管内の生体組織の画像を取得することもできる。[Modification 1]
In the above first to sixth embodiments, an example of the configuration of the
例えば、再開通カテーテルシステム1は、貫通用ガイドワイヤ400を使用せずに、プラズマを利用した生体組織のアブレーションを行うプラズマガイドワイヤを用いてCTOの開通を図るシステムとして構成されてもよい。この場合、カテーテル100,100A~100Eにおいて、シャフト101,101A~101Eの先端部に電極を設けることが好ましい。そうすれば、シャフト101の先端部に設けられた電極と、プラズマガイドワイヤの先端電極との間とに高周波電力を出力することで、両電極間の放電によって放出されたエネルギーを用いて、生体組織のアブレーションを行うことができる。なお、シャフト101の先端部の電極は、先端チップ103よりも基端側、かつ、第3先端開口130aよりも先端側に配置されることが好ましい。 For example, the
例えば、再開通カテーテルシステム1は上述しない他の方法で使用されてもよい。例えば、再開通カテーテルシステムは、冠動脈以外の血管(例えば脳血管等)に使用されてもよく、血管以外の生体管腔内において使用されてもよい。例えば、再開通カテーテルシステム1は、CTOの開通以外の他の治療や、検査のために使用されてもよい。 For example,
[変形例2]
上記第1~第6実施形態では、カテーテル100,100A~100Eの構成の一例を示した。しかし、カテーテル100の構成は種々の変更が可能である。例えば、カテーテル100は、オーバーザワイヤタイプのカテーテルとして構成されてよい。例えば、シャフト101,101A~101Eは、図3~図5で説明した封止部材102に代えて、または封止部材102と共に、第1~第3インナーシャフト110,120,130の外周面を覆うアウターシャフトを用いて構成されてよい。例えば、シャフト101,101A~101Eの外表面または内表面のうちの少なくともいずれかは、任意の樹脂層(例えば、親水性樹脂層、疎水性樹脂層、親水性樹脂層や疎水性樹脂層の接合性を高めるための下地層など)によりコーティングされていてもよく、表面に薬剤が塗布されていてもよい。[Modification 2]
In the first to sixth embodiments described above, examples of the configurations of the
[変形例3]
第1~6実施形態のカテーテル100,100A~100Eの構成、及び上記変形例1,2のカテーテル100,100A~100Eの構成は、適宜組み合わせてもよい。例えば、第2実施形態のカテーテル100Aにおいて、さらに補強部材140を省略し、基端区間S3を有さない構成としてもよい。例えば、第2,5,6実施形態の構成において、第3実施形態で説明した補強部材140Cを採用してもよい。例えば、第2,3,4実施形態の構成において、第5実施形態で説明したインナーチューブを採用してもよく、第6実施形態で説明した単一の部材により構成されたシャフト101Eを採用してもよい。[Modification 3]
The configurations of the
以上、実施形態、変形例に基づき本態様について説明してきたが、上記した態様の実施の形態は、本態様の理解を容易にするためのものであり、本態様を限定するものではない。本態様は、その趣旨並びに特許請求の範囲を逸脱することなく、変更、改良され得ると共に、本態様にはその等価物が含まれる。また、その技術的特徴が本明細書中に必須なものとして説明されていなければ、適宜、削除することができる。 The present aspect has been described above based on the embodiments and modifications, but the above-described embodiments are intended to facilitate understanding of the present aspect, and do not limit the present aspect. This aspect may be modified and modified without departing from the spirit and scope of the claims, and this aspect includes equivalents thereof. Also, if the technical features are not described as essential in this specification, they can be deleted as appropriate.
1…再開通カテーテルシステム
50…ケーブル
100,100A~100E…カテーテル
100x…カテーテル(比較例)
101,101A~101E…シャフト
101p…突出部
102…封止部材
103…先端チップ
104…マーカー
110,110D…第1インナーシャフト
110L…第1ルーメン
110a…第1先端開口
110b,110bA…第1基端開口
120…第2インナーシャフト
120L…第2ルーメン
120a…第2先端開口
120b…第2基端開口
130,130D…第3インナーシャフト
130L…第3ルーメン
130a,130aA…第3先端開口
130b…第3基端開口
140,140C…補強部材
141…テーパ部
142…本体部
143…ブレード
150…調節器
160…コネクタ
200…イメージングセンサ
201…トランスデューサ
202…ドライビングケーブル
203…コネクタ
204…モータドライブ
300…イメージングコンソール
302…ディスプレイ
400…貫通用ガイドワイヤ
401…尖状部(先端部)
402…トルカー
500…モノレールガイドワイヤ
S1…先端区間
S11…第1徐変区間
S12…第2徐変区間
S13…接続区間
S2…中間区間
S3…基端区間1...
402...
Claims (6)
Translated fromJapanese前記シャフトは、
第1先端と第1基端とを有し、前記シャフトの長手方向に延びる第1ルーメンと、
前記第1ルーメンに隣り合って延びる第2ルーメンであって、前記第1先端よりも基端側に位置する第2先端と、前記第1基端よりも基端側に位置する第2基端とを有する第2ルーメンと、
前記第1ルーメンと前記第2ルーメンの両方に隣り合って延びる第3ルーメンであって、前記第1先端及び前記第2先端よりも基端側かつ前記第1基端よりも先端側に位置する第3先端と、前記第1基端よりも基端側に位置する第3基端とを有する第3ルーメンと、
を備え、
前記シャフトは、先端側から基端側に向かって、
前記第1ルーメンと前記第2ルーメンを含み、楕円形状の横断面を有する先端区間と、
前記第1ルーメンと前記第2ルーメンと前記第3ルーメンを含み、円形状の横断面を有する中間区間と、を有している、カテーテル。A catheter having a shaft,
The shaft is
a first lumen extending longitudinally of the shaft having a first distal end and a first proximal end;
A second lumen extending adjacent to the first lumen, comprising a second distal end located proximally relative to the first distal end and a second proximal end located proximally relative to the first proximal end. a second lumen having
A third lumen extending adjacent to both the first lumen and the second lumen, the third lumen being positioned proximally relative to the first distal end and the second distal end and distally relative to the first proximal end. a third lumen having a third distal end and a third proximal end positioned closer to the proximal side than the first proximal end;
with
The shaft extends from the distal side to the proximal side,
a tip section including the first lumen and the second lumen and having an elliptical cross-section;
a middle section including said first lumen, said second lumen and said third lumen and having a circular cross-section.
前記シャフトは、前記中間区間よりも基端側において、さらに、前記第2ルーメンと前記第3ルーメンを含み、円形状の横断面を有する基端区間を有している、カテーテル。The catheter of claim 1, wherein
A catheter according to claim 1, wherein the shaft further includes a proximal section proximal to the intermediate section and having a circular cross-section including the second lumen and the third lumen.
前記シャフトのうち、前記基端区間に対応する部分は、管状の補強部材により覆われている、カテーテル。3. The catheter of claim 2, wherein
A catheter, wherein a portion of the shaft corresponding to the proximal section is covered with a tubular reinforcing member.
前記シャフトは、前記第3ルーメンの前記第3先端に対応する位置において、前記シャフトの横断面が、先端側から基端側に向かって楕円形状から円形状に徐変する第1徐変区間を有しており、
前記シャフトの外周面のうち、前記第1徐変区間には、前記第3先端と外部とを連通する楕円形状の第3先端開口が設けられている、カテーテル。A catheter according to any one of claims 1 to 3,
The shaft has, at a position corresponding to the third distal end of the third lumen, a first gradually changing section in which the cross section of the shaft gradually changes from an elliptical shape to a circular shape from the distal end side to the proximal end side. has
A catheter according to claim 1, wherein the first gradually changing section of the outer peripheral surface of the shaft is provided with an elliptical third tip opening that communicates the third tip with the outside.
前記シャフトは、前記第1ルーメンの前記第1基端に対応する位置において、前記シャフトの横断面が、先端側から基端側に向かって円形状から楕円形状に徐変する第2徐変区間を有しており、
前記シャフトの外周面のうち、前記第2徐変区間には、前記第1基端と外部とを連通する楕円形状の第1基端開口が設けられている、カテーテル。A catheter according to any one of claims 1 to 4,
In the shaft, at a position corresponding to the first base end of the first lumen, the cross section of the shaft gradually changes from a circular shape to an elliptical shape from the distal end side to the proximal end side in a second gradually changing section. and
A catheter according to claim 1, wherein an elliptical first base end opening communicating between the first base end and the outside is provided in the second gradually changing section of the outer peripheral surface of the shaft.
前記シャフトは、前記第2徐変区間と前記基端区間の間において、さらに、前記第2ルーメンと前記第3ルーメンを含み、楕円形状の横断面を有する接続区間を有している、カテーテル。A catheter of claim 5, wherein
A catheter, wherein the shaft further has a connecting section between the second graduated section and the proximal section, the connecting section including the second lumen and the third lumen and having an elliptical cross-section.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021105518AJP2023004052A (en) | 2021-06-25 | 2021-06-25 | catheter |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021105518AJP2023004052A (en) | 2021-06-25 | 2021-06-25 | catheter |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2023004052Atrue JP2023004052A (en) | 2023-01-17 |
Family
ID=85101056
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021105518APendingJP2023004052A (en) | 2021-06-25 | 2021-06-25 | catheter |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2023004052A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024241378A1 (en)* | 2023-05-19 | 2024-11-28 | 朝日インテック株式会社 | Medical device and method for manufacturing medical device |
| WO2024241379A1 (en)* | 2023-05-19 | 2024-11-28 | 朝日インテック株式会社 | Medical device and method for producing medical device |
| WO2025028186A1 (en)* | 2023-08-01 | 2025-02-06 | 株式会社カネカ | Catheter |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110060276A1 (en)* | 2007-09-12 | 2011-03-10 | Cook Incoporated | Balloon catheter for delivering a therapeutic agent |
| US20190167955A1 (en)* | 2017-12-05 | 2019-06-06 | Justin Panian | Method and Devices for Passing a Chronic Total Occlusion and Re-entry into a True Lumen |
- 2021
- 2021-06-25JPJP2021105518Apatent/JP2023004052A/enactivePending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110060276A1 (en)* | 2007-09-12 | 2011-03-10 | Cook Incoporated | Balloon catheter for delivering a therapeutic agent |
| US20190167955A1 (en)* | 2017-12-05 | 2019-06-06 | Justin Panian | Method and Devices for Passing a Chronic Total Occlusion and Re-entry into a True Lumen |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024241378A1 (en)* | 2023-05-19 | 2024-11-28 | 朝日インテック株式会社 | Medical device and method for manufacturing medical device |
| WO2024241379A1 (en)* | 2023-05-19 | 2024-11-28 | 朝日インテック株式会社 | Medical device and method for producing medical device |
| WO2025028186A1 (en)* | 2023-08-01 | 2025-02-06 | 株式会社カネカ | Catheter |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2304742C (en) | Ultrasound imaging guidewire with static central core and tip | |
| JP7465824B2 (en) | catheter | |
| JP2023004052A (en) | catheter | |
| CN108024785B (en) | Intravascular imaging catheter and method of use | |
| JP7292448B2 (en) | Lined Variable Blade Differential Durometer Hardness Double-Tube Shaft with Cruciform Internal Contour | |
| JP7061682B2 (en) | Catheter and recanalization catheter system | |
| JP2004097286A (en) | Catheter | |
| JP2018033507A (en) | Medical device | |
| JP2017093506A (en) | Imaging diagnosis catheter | |
| JP7555421B2 (en) | Catheter and recanalization catheter system | |
| JP7487319B2 (en) | Catheter and recanalization catheter system | |
| JP2024077665A (en) | catheter | |
| JP2018047063A (en) | Connection port and medical device | |
| JP6779799B2 (en) | Medical device | |
| US20240358348A1 (en) | Catheter | |
| JP2020062079A (en) | Catheter for image diagnosis | |
| WO2024241637A1 (en) | Medical device | |
| WO2025115167A1 (en) | Medical device | |
| JP2003061963A (en) | Ultrasonic catheter | |
| JP2024172739A (en) | Catheters and medical devices | |
| JP2018121966A (en) | Medical device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20240115 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20241009 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20241203 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20250115 | |
| A02 | Decision of refusal | Free format text:JAPANESE INTERMEDIATE CODE: A02 Effective date:20250507 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20250730 |