JP2022149407A - Electronic device - Google Patents
Electronic deviceDownload PDFInfo
- Publication number
- JP2022149407A JP2022149407AJP2021051547AJP2021051547AJP2022149407AJP 2022149407 AJP2022149407 AJP 2022149407AJP 2021051547 AJP2021051547 AJP 2021051547AJP 2021051547 AJP2021051547 AJP 2021051547AJP 2022149407 AJP2022149407 AJP 2022149407A
- Authority
- JP
- Japan
- Prior art keywords
- exterior
- microphone
- hole
- engaging
- convex
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Manipulator (AREA)
- Details Of Audible-Bandwidth Transducers (AREA)
- Toys (AREA)
Abstract
Description
Translated fromJapanese本発明は、電子機器に関する。 The present invention relates to electronic equipment.
ペットのような親しみのあるロボットが知られている。例えば、特許文献1は、ペットとして飼育される動物に似せた外観形状を有するロボットを開示している。特許文献1には、ロボットに個性を持たせるために、ロボットにその本体部を覆う外装が装着されることが開示されている。また、特許文献1には、ロボットが耳に相当するマイクロホンを備えており、マイクロホンで集音したユーザからのサウンドコマンドに基づいて動作することが開示されている。 Robots that are familiar like pets are known. For example, Patent Literature 1 discloses a robot having an external shape that resembles an animal kept as a pet. Patent Literature 1 discloses that a robot is equipped with an exterior that covers its main body in order to give the robot individuality. Further, Patent Document 1 discloses that a robot is equipped with a microphone corresponding to an ear, and operates based on a sound command from a user collected by the microphone.
上記のような外装及びマイクロホンを備えるロボットにおいて、ロボットが動いた際に、外装がロボットの本体部に擦れることによる擦れ音が生じることがある。このような擦れ音が生じると、擦れ音をマイクロホンが拾い、外部からの何らかの意味のある音であるとロボットの処理装置が誤認識し、ロボットが誤反応してしまう、という課題がある。またマイクロホンから入力される音に反応するが、自身は動かない、外装を備える電子機器であっても、電子機器を持ち運び等する際に同様の課題が発生する。 In a robot equipped with an exterior and a microphone as described above, when the robot moves, the exterior rubs against the main body of the robot, which may cause a rubbing sound. When such a rubbing sound occurs, the microphone picks up the rubbing sound, and the processor of the robot mistakenly recognizes that it is some kind of meaningful sound from the outside, causing the robot to react erroneously. Even an electronic device with an exterior that responds to sound input from a microphone but does not move itself poses a similar problem when the electronic device is carried.
本発明は、上記のような問題点を解決するためになされたものであり、外装及びマイクロホンを備える電子機器において、擦れ音のようなノイズがマイクロホンに入力されることを抑えることが可能な電子機器を提供することを目的とする。 SUMMARY OF THE INVENTION The present invention has been made to solve the above problems, and is an electronic device that is capable of suppressing input of noise such as scraping noise to the microphone in an electronic device having an exterior and a microphone. The purpose is to provide equipment.
上記目的を達成するため、本発明に係る電子機器の第1の態様は、
外装と、
前記外装に覆われる本体部と、
前記外装の内側に設けられた係合部と、
前記本体部に設けられ、前記係合部と係合することにより前記外装を前記本体部に係止する被係合部と、
マイクロホンと、を備え、
前記係合部と前記被係合部とのうちの一方は、嵌合部を有し、
前記係合部と前記被係合部とのうちの他方は、前記嵌合部に嵌合する凸状部品であり、
前記凸状部品は、前記凸状部品の高さ方向に前記凸状部品を貫通する貫通孔を有し、
前記マイクロホンは、前記本体部の内部において前記貫通孔に対向する位置に配置されている。In order to achieve the above object, a first aspect of an electronic device according to the present invention includes:
Exterior and
a main body covered with the exterior;
an engaging portion provided inside the exterior;
a to-be-engaged portion provided on the main body portion for locking the exterior to the main body portion by engaging with the engaging portion;
a microphone;
one of the engaging portion and the engaged portion has a fitting portion;
the other of the engaging portion and the engaged portion is a convex component that fits into the fitting portion;
The convex part has a through hole penetrating the convex part in the height direction of the convex part,
The microphone is arranged inside the main body at a position facing the through hole.
上記目的を達成するため、本発明に係る電子機器の第2の態様は、
外装と、
前記外装に覆われる本体部と、
前記外装の内側に設けられた係合部と、
前記本体部に設けられ、前記係合部と係合することにより前記外装を前記本体部に係止する被係合部と、
マイクロホンと、を備え、
前記係合部と前記被係合部とのうちの一方は、嵌合部を有し、
前記係合部と前記被係合部とのうちの他方は、前記嵌合部に嵌合する凸状部品であり、
前記凸状部品は、前記凸状部品の高さ方向に前記凸状部品を貫通する貫通孔を有し、
前記マイクロホンは、前記貫通孔の内部に配置されている。In order to achieve the above object, a second aspect of the electronic device according to the present invention includes:
Exterior and
a main body covered with the exterior;
an engaging portion provided inside the exterior;
a to-be-engaged portion provided on the main body portion for locking the exterior to the main body portion by engaging with the engaging portion;
a microphone;
one of the engaging portion and the engaged portion has a fitting portion;
the other of the engaging portion and the engaged portion is a convex component that fits into the fitting portion;
The convex part has a through hole penetrating the convex part in the height direction of the convex part,
The microphone is arranged inside the through hole.
本発明によれば、外装及びマイクロホンを備える電子機器において、擦れ音のようなノイズがマイクロホンに入力されることを抑えることができる。 According to the present invention, in an electronic device having an exterior and a microphone, it is possible to suppress input of noise such as rubbing noise to the microphone.
以下、本発明の実施の形態について、図面を参照しながら説明する。なお、実施の形態の理解を容易にするため、図1中の前後の方向を適宜参照しながら説明する。 BEST MODE FOR CARRYING OUT THE INVENTION Hereinafter, embodiments of the present invention will be described with reference to the drawings. In order to facilitate understanding of the embodiment, the description will be made with reference to the front and rear directions in FIG. 1 as appropriate.
(実施の形態1)
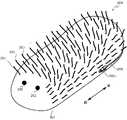
図1に、実施の形態1に係る電子機器であるロボット200の外観を示す。ロボット200は、小動物を模したペットロボットである。ロボット200は、その外観を小動物に似せるため、外装201上に、小動物の目を模した2つの装飾部品202と、多数の毛203と、を備える。ロボット200は、図2に示すように、本体部207と、本体部207を覆う外装201と、を備える。(Embodiment 1)
FIG. 1 shows the appearance of a
本体部207は、図2及び図3に示すように、頭部204と、頭部204の後方に設けられた胴体部206と、頭部204と胴体部206とを連結した連結部205と、を含む。本体部207は、例えば合成樹脂製である。本体部207は、ユーザに機械的な印象を与えることがないように、例えば薄いピンク色で着色されている。 2 and 3, the
頭部204は、小動物の頭に相当する部位である。頭部204には、図3に示すように、2つの凸状部品241が設けられている。凸状部品241は、頭部204の筐体からその外方に突出した部品である。凸状部品241は、被係合部の一例であって、外装201(図2)に設けられた係合部(図2における係合板260)と係合する。外装201(図2)に設けられた係合部と、頭部204に設けられた被係合部とを係合させることにより、頭部204が動作することに追従して外装201(図2)を動かすことができる。なお、係合部及び被係合部の詳細については後述する。 A
連結部205は、図2に示すように、頭部204の後端部と胴体部206の前端部とを連結している。連結部205は、ひねりモータ221と、上下モータ222と、を備える。 The connecting
ひねりモータ221は、図3に示すように、前後方向に延びる軸102を中心に矢印Y2の方向に頭部204を回転させる。このように頭部204を動作させることにより、図1に示す小動物を模したロボット200に、首を傾ける仕草をしているような動作をさせることができる。また、上下モータ222は、図2に示すように、図を貫く方向に平行な軸103を中心に矢印Y1で示す方向に頭部204を回転させる。このように頭部204を動作させることにより、図1に示す小動物を模したロボット200に、頭を上下に振る仕草をしているような動作をさせることができる。 As shown in FIG. 3, the
連結部205は、ひねりモータ221による回転と上下モータ222による回転との2軸で頭部204が動作可能なように、頭部204と胴体部206とを連結している。頭部204は、ひねりモータ221及び上下モータ222の駆動により動くことが可能な可動部の一例である。また、ひねりモータ221及び上下モータ222は、頭部204を動かす駆動部の一例である。 The connecting
胴体部206は、小動物の胴体に相当する部位である。胴体部206は、前後方向に長い形状を有する。胴体部206は、図2に示すように、床、テーブル等の載置面101に外装201を介して載置される。 The
胴体部206には、図3に示すように、凸状部品241,242が設けられている。凸状部品241,242は、胴体部206の筐体からその外方に突出した部品である。胴体部206は、その後方部分に複数の凸状部品241を備え、その前方部分の上側に1つの凸状部品242を備える。凸状部品241,242は、被係合部の一例であって、外装201(図2)に設けられた係合部(図2における係合板260)と係合する。外装201(図2)に設けられた係合部と、胴体部206に設けられた被係合部とを係合させることにより、外装201を胴体部206に係止することができる。なお、胴体部206に設けられた凸状部品241は、頭部204に設けられた凸状部品241と同様の構成を有する。 As shown in FIG. 3, the
また、ロボット200は、胴体部206の内部に、マイクロホン290と、リード線291と、制御ユニット292と、を備える。 The
マイクロホン290は、ロボット200の周囲で発生した音の入力を受け付ける。ロボット200の周囲で発生した音は、具体的には、ロボット200の周囲に存在する人、動物等から発声された音声、ロボット200の周囲で生じた環境音等である。マイクロホン290は、凸状部品242の真下の位置に設けられている。
より詳細には、マイクロホン290は、音波による空気の振動を受け振動する振動板(コーン紙)と、振動板の振動を電気信号に変換する変換部であるコイルおよび磁石とを備える。マイクロホン290は、音が入力されると、その音を電気信号に変換し、リード線291を介して制御ユニット292に送信する。 More specifically, the
制御ユニット292は、CPU(Central Processing Unit)等のプロセッサと、ROM(Read Only Memory)、RAM(Random Access Memory)、フラッシュメモリ等の記憶部と、を備えており、ロボット200の各部の動作を制御する。例えば、制御ユニット292は、ひねりモータ221及び上下モータ222に駆動信号を送信し、ひねりモータ221及び上下モータ222を駆動させる。 The
また、制御ユニット292は、マイクロホン290に入力された音に基づいて、ロボット200を動作させる。具体的に説明すると、制御ユニット292は、マイクロホン290に音が入力された場合、入力された音を示す信号を、リード線291を介して受信する。制御ユニット292は、受信した信号を図示しないADコンバータによりデジタル信号に変換し、変換された音声デジタル信号を音声認識等の手法で解析し、解析結果に基づいて、ひねりモータ221及び上下モータ222を駆動させる。 Also, the
例えば、制御ユニット292は、マイクロホン290に周囲の人の音声が入力されると、入力された音声の内容に対応する動作をロボット200に行わせる。或いは、制御ユニット292は、マイクロホン290に周囲の環境音が入力されると、入力された音の大きさ、種類等に対応する動作をロボット200に行わせる。これにより、制御ユニット292は、まるで小動物が周囲の音に反応して動いているように、ロボット200を動作させる。 For example, when the voice of a surrounding person is input to the
外装201は、図1に示すように前後方向に長く、内部に本体部207(図2)を収容することが可能な袋状の形状をなしている。外装201は、図4(a)、(b)に示すように、シート状の表地251と裏地252とを備えており、表地251と裏地252とを互いに重ね合わせた状態で形成されている。 The exterior 201 is elongated in the front-rear direction as shown in FIG. 1, and has a bag-like shape capable of accommodating the main body 207 (FIG. 2) therein. As shown in FIGS. 4(a) and 4(b), the
表地251は、外装201の表側の層を形成している。表地251は、小動物の表皮を模擬するために、図1及び図2に示すように、複数の毛203を有する。表地251の素材として、例えば、人工のパイル織物が用いられる。これにより、ロボット200の肌触りを小動物の肌触りに似せることができる。なお、図4(a)、(b)においては、図面の複雑化を防ぐために図1及び図2で示した毛203の図示は省略している。後述する図7(a)、(b)、図8及び図9でも同様である。 The
裏地252は、外装201の裏側の層を形成している。裏地252の素材として、例えば、合成繊維を織った織布が用いられる。或いは、裏地252の素材として、天然皮革、人工皮革、合成樹脂製のシート材、ゴム製のシート材、天然繊維等が用いられても良い。 Lining 252 forms the back layer of
表地251及び裏地252がこのような素材で形成されているため、外装201は、ある程度の伸縮性を有する。言い換えると、外装201は、力が加えられると、加えられた力に応じて柔軟に伸び縮みする。そのため、外装201は、ロボット200の可動部である頭部204の動きに柔軟に追従する。 Since the
表地251と裏地252とは、複数箇所で糸253を用いて互いに縫い合われている。このように、複数箇所で糸253(図4(a)、(b))を用いて表地251と裏地252とを縫い合わせることで、表地251と裏地252との間でずれを生じさせることなく、一体的に取り扱うことを可能としている。 The
外装201の後部には、図1に示すように、線ファスナ208が取り付けられている。外装201の内部に本体部207(図2)を収容した状態でスライダ208aをスライドさせて閉じた状態とすることで、本体部207(図2)を収容した状態が保持される。一方、スライダ208aをスライドさせて線ファスナ208を開いた状態とすることで、内部に収容した本体部207(図2)を取り出したり、外装201の内部に本体部207(図2)を収容したりすることができる。 A
外装201の内側には、図2に示すように、複数の係合板260が設けられている。複数の係合板260は、本体部207に設けられた凸状部品241,242と1対1で、凸状部品241,242が設けられた位置と対応する位置に、それぞれ設けられている。複数の係合板260は全て外装201の内側に設けられているため、係合板260がロボット200の外部から視認されることがなく、ロボット200の意匠性が損なわれることがない。 A plurality of
複数の係合板260のそれぞれは、係合部の一例であって、本体部207に設けられた被係合部である凸状部品241,242と係合する。言い換えると、係合板260と凸状部品241又は凸状部品242とは、外装201を本体部207に係止させるための、いわゆるスナップとして用いられる。なお、外装201に設けられた複数の係合板260は、全て同じ構成を有する。 Each of the plurality of engaging
以下、係合板260と凸状部品241,242とにより外装201と本体部207とを係止させる構成について、詳細に説明する。 A configuration for locking the
図5(a)に示すように、係合板260は、薄い円板状をしている。係合板260は、その中央に、凸状部品241,242が挿通されて嵌合する円状の嵌合孔260aを有する。係合板260は、例えばポリアミド6(PA6)製であって、ポリアミド6(PA6)製のプレートを円形状に打ち抜き、中央に嵌合孔260aを形成することにより製造される。嵌合孔260aは、嵌合部の一例である。 As shown in FIG. 5(a), the
係合板260は、図4(a)、(b)に示すように、糸254を用いて外装201の裏地252に縫い付けられる。なお、係合板260は、ロボット200の意匠性を損なわないようにするため、裏地252のみに縫い付けられており、表地251には縫い付けられていない。係合板260の裏地252への縫い付けは、例えば図5(a)に示すように、嵌合孔260aをはさんで直線状の2本の平行なラインL1,L2に沿って行われる。 The
次に、凸状部品241について説明する。なお、頭部204及び胴体部206に設けられた複数の凸状部品241は、全て同じ構成を有する。各凸状部品241は、被係合部(第1の被係合部)の一例である。以下では、図2における“A”部の凸状部品241及び係合板260の構成について説明する。 Next, the
凸状部品241は、図4(a)及び図5(a)に示すように、大径部である頭部241aと、小径部である軸部241bと、を備える。頭部241aは、係合板260に形成された嵌合孔260aの径よりも大きい径を有し、胴体部206の筐体から突出している。軸部241bは、嵌合孔260aの径とほぼ等しい径を有する円柱状をしており、胴体部206の筐体に埋め込まれている。 As shown in FIGS. 4A and 5A, the
より詳細には、凸状部品241は、本体部207の筐体と一体で設けられている。具体的に説明すると、頭部204及び胴体部206の各筐体は、凸状部品241の軸部241bが各筐体に埋め込まれた状態で、凸状部品241と共に成形されることにより、製造される。なお、図5(a)、(b)では、係合板260を凸状部品241に係合させる様子を見やすくするために、胴体部206の筐体の図示を省略している。後述する図6(a)、(b)も同様である。 More specifically, the
係合板260を凸状部品241に係合させる場合には、まず図5(a)の矢印で示すように、係合板260を凸状部品241に近づける。続いて、係合板260に形成された嵌合孔260aを、頭部241aに押し付けながら頭部241aを乗り越えさせる。そして、図5(b)に示すように、嵌合孔260aを軸部241bに嵌合させる。ここで、係合板260は、若干の伸縮性を有する素材で形成されている。そのため、嵌合孔260aは頭部241aを乗り越えることが可能である。 When engaging the
頭部241aを乗り越えた係合板260の嵌合孔260aは、図4(a)及び図5(b)に示すように、凸状部品241の軸部241bと隙間なく嵌合した状態にあり、さらにその上方には頭部241aが配される。そのため、係合板260と凸状部品241との係合状態を強固なものとすることができる。係合状態を解除しようといった明確な意図を持って係合板260と凸状部品241とを取り外す作業をしない限り、係合板260と凸状部品241との係合状態は簡単に解除されることはない。 As shown in FIGS. 4A and 5B, the
続いて、凸状部品242について説明する。凸状部品242は、図2における“B”部に設けられており、被係合部(第2の被係合部)の一例である。 Next, the
凸状部品242は、図4(b)及び図6(a)に示すように、大径部である頭部242aと、小径部である軸部242bと、を備える。頭部242aは、係合板260に形成された嵌合孔260aの径よりも大きい径を有し、胴体部206の筐体から突出している。軸部242bは、嵌合孔260aの径とほぼ等しい径を有する円柱状をしており、胴体部206の筐体に埋め込まれている。 As shown in FIGS. 4(b) and 6(a), the
このような凸状部品241と同様の構成に加えて、凸状部品242は、貫通孔242cを更に有する。貫通孔242cは、凸状部品242の高さ方向に凸状部品242を貫通する孔である。ここで、凸状部品242の高さ方向は、凸状部品242が胴体部206の筐体から突き出た方向であって、胴体部206の内部から外部への方向である。なお、貫通孔242cの断面は、図6(a)に示すように円状であることに限らず、四角形状、三角形状等の角形状であっても良い。 In addition to such a configuration similar to that of the
より詳細には、貫通孔242cは、凸状部品242の頭部242aの上面から、軸部242bを通って、胴体部206の内部まで貫通している。ロボット200の外部で発生した音は、貫通孔242cを通って胴体部206の内部に導かれ、マイクロホン290に入力される。このように、貫通孔242cは、胴体部206の外部で発生した音を胴体部206の内部に設置されたマイクロホン290に集音するための集音孔(マイク孔)として機能する。 More specifically, the through-
マイクロホン290は、胴体部206の筐体の内部において、貫通孔242cに対向する位置に配置されている。言い換えると、マイクロホン290は、貫通孔242cの直下であって、貫通孔242cの筐体内部の出口付近に、マイクロホン290のヘッド部分を貫通孔242cの方に向けた状態で配置されている。このように、マイクロホン290の頭上に貫通孔242cが位置しているため、ロボット200の外部で発生した音が貫通孔242cを通ってマイクロホン290に集音され易くなる。 The
なお、図4(b)では、マイクロホン290は、その上面が貫通孔242cの底部に接する位置に配置されている。しかしながら、マイクロホン290は、貫通孔242cに対向する位置であれば、貫通孔242cの底部から離れた位置に配置されていても良い。 In addition, in FIG. 4B, the
凸状部品242は、凸状部品241と同様に、胴体部206の筐体と一体で設けられている。具体的に説明すると、胴体部206の筐体は、凸状部品242の軸部242bが筐体に埋め込まれた状態で、凸状部品242と共に成形されることにより、製造される。 Like the
また、係合板260を凸状部品242に係合させる方法は、係合板260を凸状部品241に係合させる方法と同様である。具体的に説明すると、まず図6(a)の矢印で示すように、係合板260を凸状部品242に近づける。続いて、係合板260に形成された嵌合孔260aを、頭部242aに押し付けながら頭部242aを乗り越えさせる。そして、図6(b)に示すように、嵌合孔260aを軸部242bに嵌合させる。 Also, the method of engaging the
このような凸状部品241,242と係合板260とが係合することにより、外装201は、複数個所で、その内部に収容した本体部207である頭部204及び胴体部206と係止される。これにより、外装201は、本体部207の動きに追従して動く。具体的に説明すると、ひねりモータ221及び上下モータ222の駆動により頭部204が動くと、頭部204の動きに伴って、頭部204を含む本体部207を覆っている外装201も動く。このとき、外装201は、伸縮性を有する素材で形成されているため、頭部204の動きに追従して柔軟に伸縮しながら、本体部207の表面上を動く。これにより、小動物を模したロボット200を、まるで生きているかのように動かすことができる。 By engaging the
このとき、外装201のうちの本体部207に係止されていない箇所は、頭部204の動きに追従して本体部207に対して相対的に動く。具体的には、外装201のうちの本体部207に係止されていない箇所は、本体部207の筐体の表面上を擦るように動く。これにより、外装201が本体部207に擦れる擦れ音がノイズとして生じる。このような擦れ音がマイクロホン290に入力されると、外部からの何らかの意味のある音であるとロボットの処理装置が誤認識し、ロボット200が誤反応するおそれがある。 At this time, the portions of the exterior 201 that are not locked to the
これに対して、実施の形態1に係るロボット200では、外装201を本体部207に係止する凸状部品242が集音用の貫通孔242cを有しており、マイクロホン290が本体部207の内部において貫通孔242cに対向する位置に配置されている。これにより、マイクロホン290の近傍では外装201の動きが規制されるため、外装201が本体部207に擦れる際に生じる擦れ音がマイクロホン290に入力されることを抑えることができる。その結果、ロボット200が誤反応することを抑えることができる。 On the other hand, in the
また、外装201とマイクロホン290との位置関係が変化する場合には、マイクに入力される音の音質が変わったり、本体部207の内部から発せられるモータ等の動作音を拾いやすくなったりする場合がある。これに対して、実施の形態1に係るロボット200では、外装201の動きが規制される位置である凸状部品242の近傍にマイクロホン290が配置されているため、外装201の動きに伴うマイクロホン290と外装201との距離を一定に保つことができる。そのため、貫通孔242cを通ってマイクロホン290に入力される音のばらつきを抑えることができ、音信号の誤認識を抑えることができる。 Further, when the positional relationship between the exterior 201 and the
なお、マイクロホン290に擦れ音が入力されること、及びマイクロホン290に入力される音のばらつきを抑える対策として、マイクロホン290を外装201の外側に配置する方法が考えられる。しかしながら、マイクロホン290を外装201の外側に配置すると、ロボット200の外観に構造物が現れるため、ロボット200の意匠性を低下させることにつながる。これに対して、実施の形態1に係るロボット200では、マイクロホン290を本体部207の内部に配置している。そのため、ロボット200の意匠性を損なわずに、マイクロホン290に擦れ音が入力されること、及びマイクロホン290に入力される音のばらつきを抑えることができる。 As a countermeasure for suppressing the input of the rubbing sound to the
(実施の形態2)
次に、本発明の実施の形態2について説明する。実施の形態1と同様の構成及び機能については、適宜説明を省略する。(Embodiment 2)
Next, Embodiment 2 of the present invention will be described. Descriptions of the same configurations and functions as in the first embodiment will be omitted as appropriate.
上記実施の形態1における凸状部品241,242は、本体部207の筐体と一体で設けられていた。これに対して、実施の形態2における凸状部品243,244は、本体部207の筐体と一体で設けられておらず、本体部207の筐体に対して着脱可能な部品である。 The protruding
以下、図7(a)、(b)を参照して、実施の形態2における凸状部品243,244について説明する。実施の形態2に係るロボット200は、実施の形態1で説明した貫通孔を有さない凸状部品241の代わりに、図7(a)に示す凸状部品243を備える。また、実施の形態2に係るロボット200は、実施の形態1で説明した貫通孔242cを有する凸状部品242の代わりに、図7(b)に示す凸状部品244を備える。なお、係合板260の構成は、実施の形態1と同様であるため、説明を省略する。 The
凸状部品243は、大径部である頭部243aと、小径部である軸部243bと、を備える。また、凸状部品244は、大径部である頭部244aと、小径部である軸部244bと、を備える。頭部243a,244aは、係合板260に形成された嵌合孔260aの径よりも大きい径を有し、胴体部206の筐体から突出している。軸部243b,244bは、嵌合孔260aの径とほぼ等しい径を有する円柱状をしており、胴体部206の筐体に挿入されている。 The
実施の形態2において、凸状部品243,244は、本体部207の筐体とは一体で成形されておらず、別部品である。具体的に説明すると、凸状部品243,244は、いわゆる中空ねじであって、軸部243b,244bの表面には、雄ねじが切られている。 In the second embodiment, the
一方で、頭部204及び胴体部206には、それぞれ凸状部品243,244が挿入される挿入穴213,214が設けられている。挿入穴213,214の表面には、それぞれ軸部243b,244bの雄ねじが螺合する雌ねじが切られている。頭部243a,244aは、挿入穴213,214の径よりも大きい径を有する。 On the other hand, the
凸状部品243,244は、それぞれ挿入穴213,214に挿入されて、ドライバ等で締め付けられることにより、頭部204及び胴体部206の各筐体に取り付けられる。凸状部品243,244が筐体に取り付けられた後、係合板260を凸状部品243,244に係合させることで、外装201が本体部207に係止される。なお、係合板260を凸状部品243,244に係合させる方法は実施の形態1と同様であるため、説明を省略する。 The
このような構成に加えて、凸状部品244は、貫通孔244cを更に有する。貫通孔244cは、凸状部品244の高さ方向に凸状部品244を貫通する孔である。貫通孔244cは、凸状部品244の頭部244aの上面から、軸部244bの底面まで貫通している。 In addition to such a configuration, the
また、胴体部206における挿入穴214の底部には、胴体部206の内部まで貫通する貫通孔215が設けられている。胴体部206の貫通孔215は、挿入穴214に挿入された凸状部品244の貫通孔244cの直下に位置している。 Further, a through
ロボット200の外部で発生した音は、凸状部品244の貫通孔244cと胴体部206の貫通孔215とを通って、胴体部206の内部に導かれ、マイクロホン290に入力される。このように、貫通孔244c,215は、胴体部206の外部で発生した音を胴体部206の内部に設置されたマイクロホン290に集音するための集音孔(マイク孔)として機能する。 A sound generated outside the
マイクロホン290は、胴体部206の筐体の内部において、胴体部206の貫通孔215を間に挟んで、凸状部品244の貫通孔244cに対向する位置に配置されている。このように、マイクロホン290の頭上に貫通孔244c,215が位置しているため、ロボット200の外部で発生した音が貫通孔242c,215を通ってマイクロホン290に集音され易くなる。 The
このように、外装201の動きが規制される位置である凸状部品242の近傍にマイクロホン290が配置されている。そのため、実施の形態2では、凸状部品243,244が本体部207の筐体に対して着脱可能な部品であっても、実施の形態1と同様に、外装201が本体部207に擦れる際に生じる擦れ音がマイクロホン290に入力されることを抑えることができる。また、実施の形態1と同様に、貫通孔242cを通ってマイクロホン290に入力される音のばらつきを抑えることができるという効果を得ることができる。 In this way, the
(実施の形態3)
次に、本発明の実施の形態3について説明する。実施の形態1,2と同様の構成及び機能については、適宜説明を省略する。(Embodiment 3)
Next, Embodiment 3 of the present invention will be described. Descriptions of configurations and functions similar to those of the first and second embodiments will be omitted as appropriate.
上記実施の形態1,2に係るロボット200において、マイクロホン290は、凸状部品242,244に設けられた貫通孔242c,244cに対向する位置に配置されていた。これに対して、実施の形態3では、マイクロホン290は、凸状部品245に設けられた貫通孔245cの内部に設けられる。 In
以下、図8を参照して、実施の形態3における貫通孔245cを有する凸状部品245について説明する。実施の形態3に係るロボット200は、実施の形態1で説明した貫通孔242cを有する凸状部品242の代わりに、凸状部品245を備える。なお、貫通孔を有さない凸状部品241の構成、及び係合板260の構成は、実施の形態1と同様であるため、説明を省略する。 A
凸状部品245は、大径部である頭部245aと、小径部である軸部245bと、を備える。頭部245aは、係合板260に形成された嵌合孔260aの径よりも大きい径を有し、胴体部206の筐体から突出している。軸部245bは、嵌合孔260aの径とほぼ等しい径を有する円柱状をしており、胴体部206の筐体に埋め込まれている。 The
実施の形態3において、凸状部品245は、実施の形態1と同様に、胴体部206の筐体と一体で設けられている。具体的に説明すると、胴体部206の筐体は、凸状部品245の軸部245bが筐体に埋め込まれた状態で、凸状部品245と共に成形されることにより、製造される。 In the third embodiment, the projecting
このような構成に加えて、凸状部品245は、貫通孔245cを更に有する。貫通孔245cは、凸状部品245の高さ方向に凸状部品245を貫通する孔である。貫通孔245cは、凸状部品245の頭部245aの上面から、軸部245bを通って、胴体部206の内部まで貫通している。 In addition to such a configuration, the
実施の形態3において、マイクロホン290は、凸状部品245に設けられた貫通孔245cの内部に配置されている。貫通孔245cは、マイクロホン290をその内部に収めることができるような大きさの径を有する。マイクロホン290は、貫通孔245cの内部において、マイクロホン290のヘッド部分をロボット200の外側に向けた状態で、胴体部206の外部に近い位置に配置されている。 In Embodiment 3, the
より詳細には、貫通孔245cの内部における上方部の径は、下方部の径よりも若干大きくなっている。マイクロホン290は、貫通孔245cの内部における上方部と下方部との境界部に設けられた座面245dに設置されている。マイクロホン290に接続されたリード線291は、貫通孔245cの底部を通り、胴体部206の内部に設けられた制御ユニット292に導かれている。 More specifically, the diameter of the upper portion inside the through
このように、実施の形態3では、マイクロホン290は、実施の形態1よりも胴体部206の外側に近い位置に設けられる。これにより、ロボット200の外部で発生した音は、より直接的にマイクロホン290に入力される。そのため、貫通孔245cを音が通過することによる音質の劣化(高音域の減衰)がほとんどなく、ユーザの音声、環境音等をより的確に認識し易くなる。更には、マイクロホン290が胴体部206の内部から遠い位置に設けられているため、本体部207の内部で発生したモータ等の動作音をマイクロホン290が拾うことを、より確実に抑えることができる。 Thus, in the third embodiment, the
(実施の形態4)
次に、本発明の実施の形態4について説明する。実施の形態1~3と同様の構成及び機能については、適宜説明を省略する。(Embodiment 4)
Next, Embodiment 4 of the present invention will be described. Descriptions of configurations and functions similar to those of the first to third embodiments will be omitted as appropriate.
上記実施の形態3における凸状部品245は、本体部207の筐体と一体で設けられていた。これに対して、実施の形態4における凸状部品246は、本体部207の筐体と一体で設けられておらず、本体部207の筐体に対して着脱可能な部品である。 The projecting
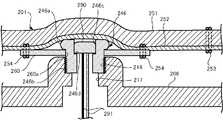
以下、図9を参照して、実施の形態4における貫通孔246cを有する凸状部品246について説明する。実施の形態4に係るロボット200は、実施の形態2で説明した貫通孔244cを有する凸状部品244の代わりに、凸状部品246を備える。なお、貫通孔を有さない凸状部品243の構成、及び係合板260の構成は、実施の形態2と同様であるため、説明を省略する。 Hereinafter, the
凸状部品246は、大径部である頭部246aと、小径部である軸部246bと、を備える。頭部246aは、係合板260に形成された嵌合孔260aの径よりも大きい径を有し、胴体部206の筐体から突出している。軸部246bは、嵌合孔260aの径とほぼ等しい径を有する円柱状をしており、胴体部206の筐体に挿入されている。 The
実施の形態4において、凸状部品246は、実施の形態2と同様に、本体部207の筐体とは一体で成形されておらず、別部品である。具体的に説明すると、凸状部品246は、いわゆる中空ねじであって、軸部246bの表面には、雄ねじが切られている。 In the fourth embodiment, similarly to the second embodiment, the projecting
一方で、胴体部206には、凸状部品246が挿入される挿入穴216が設けられている。挿入穴216の表面には、軸部246bの雄ねじが螺合する雌ねじが切られている。頭部246aは、挿入穴216の径よりも大きい径を有する。凸状部品246は、挿入穴216に挿入されて、ドライバ等で締め付けられることにより、胴体部206の筐体に取り付けられる。 On the other hand, the
このような構成に加えて、凸状部品246は、貫通孔246cを更に有する。貫通孔246cは、凸状部品246の高さ方向に凸状部品246を貫通する孔である。貫通孔246cは、凸状部品246の頭部246aの上面から、軸部246bの底面まで貫通している。 In addition to such a configuration, the
また、胴体部206における挿入穴216の底部には、胴体部206の内部まで貫通する貫通孔217が設けられている。胴体部206の貫通孔217は、挿入穴216に挿入された凸状部品246の貫通孔246cの直下に位置している。 A through
実施の形態4において、マイクロホン290は、凸状部品246に設けられた貫通孔246cの内部に配置されている。貫通孔246cは、マイクロホン290をその内部に収めることができるような大きさの径を有する。マイクロホン290は、貫通孔246cの内部において、胴体部206の外部に近い位置に配置されている。 In Embodiment 4, the
より詳細には、貫通孔246cの内部における上方部の径は、下方部の径よりも若干大きくなっている。マイクロホン290は、貫通孔246cの内部における上方部と下方部との境界部に設けられた座面246dに設置されている。マイクロホン290に接続されたリード線291は、貫通孔246cの底部を通り、胴体部206の内部に設けられた制御ユニット292に導かれている。 More specifically, the diameter of the upper portion inside the through
このように、実施の形態4では、マイクロホン290は、実施の形態2よりも胴体部206の外側に近い位置に設けられる。これにより、ロボット200の外部で発生した音は、より直接的にマイクロホン290に入力される。そのため、貫通孔246cを音が通過することによる音質の劣化(高音域の減衰)がほとんどなく、ユーザの音声、環境音等をより的確に認識し易くなる。更には、マイクロホン290が胴体部206の内部から遠い位置に設けられているため、本体部207の内部で発生したモータ等の動作音をマイクロホン290が拾うことを、より確実に抑えることができる。 Thus, in the fourth embodiment,
(変形例)
以上、実施の形態を説明したが、各実施の形態を組み合わせたり、各実施の形態を適宜、変形、省略したりすることが可能である。(Modification)
Although the embodiments have been described above, it is possible to combine each embodiment, and to modify or omit each embodiment as appropriate.
例えば、上記実施の形態では、貫通孔242c,244c~246cを有する凸状部品242,244~246及びマイクロホン290は、胴体部206の前方部分の上側に設けられていた。しかしながら、凸状部品242,244~246及びマイクロホン290は、本体部207であれば、胴体部206の別の場所に設けられても良いし、頭部204に設けられても良い。例えば、頭部204及び胴体部206に設けられた複数の凸状部品241,243のうちのいずれかが、貫通孔242c,244c~246cを有する凸状部品242,244~246であって、貫通孔242c,244cに対向する位置又は貫通孔245c,246cの内部にマイクロホン290が設けられても良い。 For example, in the above embodiments,
このように、マイクロホン290にリード線291を接続することができる場所であれば、配置の自由度は高い。例えば、凸状部品242,244~246及びマイクロホン290は、音の入力を受け付け易い場所等に自由に配置することができる。また、凸状部品242,244~246及びマイクロホン290を配置する場所として、音の入力を受け付け易い場所を選ぶ、外装201を本体部207に固定させると頭部204の動きに対する外装201の追従性を悪化させる位置を避ける等、ロボット200の性能を阻害しない配置が可能である。 In this way, the degree of freedom in placement is high as long as the
また、係合板260及び凸状部品241~246の個数は、上記実施の形態で示したものに限らず、適用するロボットに応じて任意に決定することができる。例えば、大きなロボットであれば、より多くの係合板260及び凸状部品241~246を設置するようにしてもよい。 Further, the numbers of the
上記実施の形態では、外装201の内側に設けられた係合部は、嵌合孔260aを有する係合板260であり、本体部207に設けられた被係合部は、嵌合孔260aに嵌合する凸状部品241~246であった。しかしながら、係合部と被係合部とで、凹凸を入れ替えても良い。言い換えると、外装201の内側に設けられた係合部が内側に向けて突出した凸状部品であり、本体部207に設けられた被係合部が嵌合孔を有する部品であっても良い。本体部207に設けられた被係合部が嵌合孔を有する部品であっても、被係合部は、本体部207の筐体と一体で設けられていても良いし、本体部207の筐体に対して着脱可能な部品であっても良い。このように、外装201の内側に設けられた係合部と本体部207に設けられた被係合部とのうちの一方が嵌合孔260aを有し、他方が凸状部品241~246であれば、外装201と本体部207とでどちらに凸状部品241~246が設けられていても良い。 In the above embodiment, the engaging portion provided inside the
上記実施の形態では、外装201に縫い付けられた係合部として、ポリアミド6(PA6)製のプレートを円形状に打ち抜いて成形した係合板260を用いたが、係合部の材質及び形状は任意に選択できる。例えば、係合部として、ポリカーボネード等の合成樹脂製のものを用いても良い。又は、係合部として、ポリエステル等の化学繊維の布を円形に切断したものを用いても良いし、綿、ウール等の天然繊維の布を用いても良いし、ゴム製のシート材を用いても良い。また、係合部の形状は、平板状であれば良く、三角板状、四角板状等の角形板状のものとしても良い。 In the above-described embodiment, the engaging
上記実施の形態では、係合板260の外装201への縫い位置は、平行な2本のラインL1、L2上であると説明したが、他の縫い位置であってもよい。また、係合板260の外装201への取り付けは、ミシンによる縫い付けによるものだけに限定されない。例えば、係合板260を手で縫い付けてもよいし、嵌合孔260aの周囲に接着剤を塗布して係合板260を接着してもよい。 In the above-described embodiment, the stitching position of the
上記実施の形態では、係合板260は、凸状部品241~246が嵌合する嵌合部として嵌合孔260aを有していた。しかしながら、嵌合部は、係合板260を貫通する孔であることに限らず、窪みであっても良い。そして、凸状部品241~246の頭部241a~246aが係合板260の窪みに嵌め込まれることにより、凸状部品241~246が係合板260に嵌合しても良い。この場合、貫通孔242c,244c~246cを有する凸状部品242,244~246が嵌め込まれる係合板260の窪みには、貫通孔242c,244c~246cの直上に、係合板260を貫通する貫通孔が設けられる。係合板260に設けられた貫通孔は、貫通孔242c,244cの直下又は貫通孔245c,246cの内部に配置されたマイクロホン290に集音するための集音孔(マイク孔)として機能する。 In the above embodiment, the
上記実施の形態では、頭部204が可動部であると説明した。しかしながら、可動部は、頭部204に限らず、手部、足部等であっても良い。外装201が手部、足部等の動きに追従して動くものであっても良い。また、本体部207が必ずしも可動部を有さなくても良い。この場合でも、ユーザがロボットを直接動かす際に外装201と本体部207との間の擦れ音が生じるため、擦れ音がマイクロホン290に入力されることを抑えることができる。 In the above embodiments, the
上記実施の形態では、ロボット200は小動物を模したものであると説明したが、ロボット200が何を模したものとするのかは任意である。例えば、ロボット200は、サイといった大型の動物を模したものとしてもよい。また、上記実施の形態では、外装201及びマイクロホン290を備える電子機器として、ロボット200を例にとって説明した。しかしながら、電子機器は、ロボット以外のぬいぐるみのような玩具であってもよい。さらには、電子機器は、ロボット以外の機器であってよい。例えば、電子機器がノイズキャンセリング機能を有するヘッドフォンを衣服であるパーカーのフード部分に設けるような機器であれば、ノイズキャンセリングのために外部音を取得するマイクロホンが必要であり、当該マイクロホンはフード部分の布の表地と裏地の間に実装される可能性が高い。そのような場合に本開示を適用することができる。 In the above embodiment, the
また、外装201は、本体部207の全てを覆う形態に限定されるものではなく、本体部207の一部を覆う形態であってもよい。また、外装201は小動物の毛皮を模したものであると説明したが、外装201を何にするのかは任意である。例えば、外装201を、ロボット200に取り付ける服を模したものとしてもよい。 Moreover, the
上記実施の形態では、表地251と裏地252とは、糸253を用いて互いに縫い合わせられていると説明したが、他の方法により表地251と裏地252と一体化させてもよい。例えば、接着剤を用いて、表地251と裏地252とを接着してもよい。 In the above embodiment, the
本発明は、本発明の広義の精神と範囲とを逸脱することなく、様々な実施の形態及び変形が可能とされるものである。また、前述した実施の形態は、この発明を説明するためのものであり、本発明の範囲を限定するものではない。すなわち、本発明の範囲は、実施の形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、この発明の範囲内とみなされる。以下に、本願出願の当初の特許請求の範囲に記載された発明を付記する。 The present invention is capable of various embodiments and modifications without departing from the broader spirit and scope of the invention. Moreover, the embodiments described above are for explaining the present invention, and do not limit the scope of the present invention. That is, the scope of the present invention is indicated by the claims rather than the embodiments. Various modifications made within the scope of the claims and within the meaning of equivalent inventions are considered to be within the scope of the present invention. The invention described in the original claims of the present application is appended below.
(付記1)
外装と、
前記外装に覆われる本体部と、
前記外装の内側に設けられた係合部と、
前記本体部に設けられ、前記係合部と係合することにより前記外装を前記本体部に係止する被係合部と、
マイクロホンと、を備え、
前記係合部と前記被係合部とのうちの一方は、嵌合部を有し、
前記係合部と前記被係合部とのうちの他方は、前記嵌合部に嵌合する凸状部品であり、
前記凸状部品は、前記凸状部品の高さ方向に前記凸状部品を貫通する貫通孔を有し、
前記マイクロホンは、前記本体部の内部において前記貫通孔に対向する位置に配置された、
電子機器。
(付記2)
外装と、
前記外装に覆われる本体部と、
前記外装の内側に設けられた係合部と、
前記本体部に設けられ、前記係合部と係合することにより前記外装を前記本体部に係止する被係合部と、
マイクロホンと、を備え、
前記係合部と前記被係合部とのうちの一方は、嵌合部を有し、
前記係合部と前記被係合部とのうちの他方は、前記嵌合部に嵌合する凸状部品であり、
前記凸状部品は、前記凸状部品の高さ方向に前記凸状部品を貫通する貫通孔を有し、
前記マイクロホンは、前記貫通孔の内部に配置された、
電子機器。
(付記3)
前記本体部は、可動部を有し、
前記外装は、前記可動部の動きに追従して動く、
付記1又は2に記載の電子機器。
(付記4)
前記被係合部は、前記本体部の筐体と一体で設けられた、
付記1から3のいずれか1つに記載の電子機器。
(付記5)
前記被係合部は、前記本体部の筐体に対して着脱可能な部品である、
付記1から4のいずれか1つに記載の電子機器。
(付記6)
前記係合部は、前記嵌合部を有し、
前記被係合部は、前記凸状部品である、
付記1から5のいずれか1つに記載の電子機器。
(付記7)
前記係合部は、前記凸状部品であり、
前記被係合部は、前記嵌合部を有する、
付記1から5のいずれか1つに記載の電子機器。(Appendix 1)
Exterior and
a main body covered with the exterior;
an engaging portion provided inside the exterior;
a to-be-engaged portion provided on the main body portion for locking the exterior to the main body portion by engaging with the engaging portion;
a microphone;
one of the engaging portion and the engaged portion has a fitting portion;
the other of the engaging portion and the engaged portion is a convex component that fits into the fitting portion;
The convex part has a through hole penetrating the convex part in the height direction of the convex part,
The microphone is arranged inside the main body at a position facing the through hole,
Electronics.
(Appendix 2)
Exterior and
a main body covered with the exterior;
an engaging portion provided inside the exterior;
a to-be-engaged portion provided on the main body portion for locking the exterior to the main body portion by engaging with the engaging portion;
a microphone;
one of the engaging portion and the engaged portion has a fitting portion;
the other of the engaging portion and the engaged portion is a convex component that fits into the fitting portion;
The convex part has a through hole penetrating the convex part in the height direction of the convex part,
The microphone is arranged inside the through hole,
Electronics.
(Appendix 3)
The body portion has a movable portion,
The exterior moves following the movement of the movable part,
The electronic device according to appendix 1 or 2.
(Appendix 4)
The engaged portion is provided integrally with the housing of the main body,
The electronic device according to any one of Appendices 1 to 3.
(Appendix 5)
The engaged portion is a part that can be attached to and detached from the housing of the main body,
5. The electronic device according to any one of Appendices 1 to 4.
(Appendix 6)
The engaging portion has the fitting portion,
The engaged portion is the convex component,
6. The electronic device according to any one of Appendices 1 to 5.
(Appendix 7)
The engaging portion is the convex component,
The engaged portion has the fitting portion,
6. The electronic device according to any one of Appendices 1 to 5.
101…載置面、102,103…軸、200…ロボット、201…外装、202…装飾部品、203…毛、204…頭部、205…連結部、206…胴体部、207…本体部、208…線ファスナ、208a…スライダ、213,214,216…挿入穴、215,217…貫通孔、221…ひねりモータ、222…上下モータ、241~246…凸状部品、241a~246a…頭部、241b~246b…軸部、242c,244c~246c…貫通孔、245d,246d…座面、251…表地、252…裏地、253,254…糸、260…係合板、260a…嵌合孔、290…マイクロホン、291…リード線、292…制御ユニット、L1,L2…ラインDESCRIPTION OF
Claims (7)
Translated fromJapanese前記外装に覆われる本体部と、
前記外装の内側に設けられた係合部と、
前記本体部に設けられ、前記係合部と係合することにより前記外装を前記本体部に係止する被係合部と、
マイクロホンと、を備え、
前記係合部と前記被係合部とのうちの一方は、嵌合部を有し、
前記係合部と前記被係合部とのうちの他方は、前記嵌合部に嵌合する凸状部品であり、
前記凸状部品は、前記凸状部品の高さ方向に前記凸状部品を貫通する貫通孔を有し、
前記マイクロホンは、前記本体部の内部において前記貫通孔に対向する位置に配置された、
電子機器。Exterior and
a main body covered with the exterior;
an engaging portion provided inside the exterior;
a to-be-engaged portion provided on the main body portion for locking the exterior to the main body portion by engaging with the engaging portion;
a microphone;
one of the engaging portion and the engaged portion has a fitting portion;
the other of the engaging portion and the engaged portion is a convex component that fits into the fitting portion;
The convex part has a through hole penetrating the convex part in the height direction of the convex part,
The microphone is arranged inside the main body at a position facing the through hole,
Electronics.
前記外装に覆われる本体部と、
前記外装の内側に設けられた係合部と、
前記本体部に設けられ、前記係合部と係合することにより前記外装を前記本体部に係止する被係合部と、
マイクロホンと、を備え、
前記係合部と前記被係合部とのうちの一方は、嵌合部を有し、
前記係合部と前記被係合部とのうちの他方は、前記嵌合部に嵌合する凸状部品であり、
前記凸状部品は、前記凸状部品の高さ方向に前記凸状部品を貫通する貫通孔を有し、
前記マイクロホンは、前記貫通孔の内部に配置された、
電子機器。Exterior and
a main body covered with the exterior;
an engaging portion provided inside the exterior;
a to-be-engaged portion provided on the main body portion for locking the exterior to the main body portion by engaging with the engaging portion;
a microphone;
one of the engaging portion and the engaged portion has a fitting portion;
the other of the engaging portion and the engaged portion is a convex component that fits into the fitting portion;
The convex part has a through hole penetrating the convex part in the height direction of the convex part,
The microphone is arranged inside the through hole,
Electronics.
前記外装は、前記可動部の動きに追従して動く、
請求項1又は2に記載の電子機器。The body portion has a movable portion,
The exterior moves following the movement of the movable part,
The electronic device according to claim 1 or 2.
請求項1から3のいずれか1項に記載の電子機器。The engaged portion is provided integrally with the housing of the main body,
The electronic device according to any one of claims 1 to 3.
請求項1から4のいずれか1項に記載の電子機器。The engaged portion is a part that can be attached to and detached from the housing of the main body,
The electronic device according to any one of claims 1 to 4.
前記被係合部は、前記凸状部品である、
請求項1から5のいずれか1項に記載の電子機器。The engaging portion has the fitting portion,
The engaged portion is the convex component,
The electronic device according to any one of claims 1 to 5.
前記被係合部は、前記嵌合部を有する、
請求項1から5のいずれか1項に記載の電子機器。The engaging portion is the convex component,
The engaged portion has the fitting portion,
The electronic device according to any one of claims 1 to 5.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021051547AJP7188485B2 (en) | 2021-03-25 | 2021-03-25 | Electronics |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021051547AJP7188485B2 (en) | 2021-03-25 | 2021-03-25 | Electronics |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022149407Atrue JP2022149407A (en) | 2022-10-06 |
| JP7188485B2 JP7188485B2 (en) | 2022-12-13 |
Family
ID=83463168
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021051547AActiveJP7188485B2 (en) | 2021-03-25 | 2021-03-25 | Electronics |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7188485B2 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3056215U (en)* | 1998-07-27 | 1999-02-12 | イズミ電子株式会社 | Hands-free communication device |
| JP2001191276A (en)* | 1999-10-29 | 2001-07-17 | Sony Corp | Robot system, robot device and exterior thereof |
| US20140329433A1 (en)* | 2013-05-06 | 2014-11-06 | Israel Carrero | Toy Stuffed Animal with Remote Video and Audio Capability |
| JP2018061123A (en)* | 2016-10-04 | 2018-04-12 | トヨタ自動車株式会社 | Voice recognition device |
| JP2020156607A (en)* | 2019-03-25 | 2020-10-01 | カシオ計算機株式会社 | Control device, robot, control method, and program |
- 2021
- 2021-03-25JPJP2021051547Apatent/JP7188485B2/enactiveActive
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3056215U (en)* | 1998-07-27 | 1999-02-12 | イズミ電子株式会社 | Hands-free communication device |
| JP2001191276A (en)* | 1999-10-29 | 2001-07-17 | Sony Corp | Robot system, robot device and exterior thereof |
| US20140329433A1 (en)* | 2013-05-06 | 2014-11-06 | Israel Carrero | Toy Stuffed Animal with Remote Video and Audio Capability |
| JP2018061123A (en)* | 2016-10-04 | 2018-04-12 | トヨタ自動車株式会社 | Voice recognition device |
| JP2020156607A (en)* | 2019-03-25 | 2020-10-01 | カシオ計算機株式会社 | Control device, robot, control method, and program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7188485B2 (en) | 2022-12-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11534682B2 (en) | Input device | |
| US7677353B2 (en) | Noise suppression structure | |
| JP4416027B2 (en) | Ultrasonic beauty equipment | |
| US20190141434A1 (en) | Speaker device | |
| KR20140071740A (en) | Robot cleaner | |
| CN115052222A (en) | Bone conduction earphone head and bone conduction earphone | |
| US20180008902A1 (en) | Toy reactive to a signal | |
| JP7188485B2 (en) | Electronics | |
| US12064870B2 (en) | Soundproofing device, robot apparatus, method for controlling robot apparatus, and program | |
| CN218041711U (en) | Bone conduction earphone head and bone conduction earphone | |
| JP3103674U (en) | Touch-type indirect conduction vibration type microphone | |
| CN111152239B (en) | A robot | |
| CN222561931U (en) | Wearable device | |
| JP2001309473A (en) | Waterproof vibration microphone | |
| JP6850521B2 (en) | Communication units, communication devices and programs | |
| JPWO2008029514A1 (en) | Vibration pickup microphone | |
| JP6197018B2 (en) | Plush Doll | |
| CN111601202A (en) | Wearing equipment, suit that has this wearing equipment | |
| HK1249874A1 (en) | Stuffed toy | |
| US20030031325A1 (en) | Electrolarynx with an improved diaphragm | |
| CN221283283U (en) | Sound production device and cleaning equipment | |
| JP7001851B2 (en) | Cap device, connector cap mounting structure and electronic equipment | |
| KR200270920Y1 (en) | Doll having mp3 player | |
| JP7255620B2 (en) | Device | |
| JP3068751U (en) | Drive for toys |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20210527 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20220628 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20220810 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20221101 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20221114 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:7188485 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 |