JP2021080657A - Operation object device and construction machine - Google Patents
Operation object device and construction machineDownload PDFInfo
- Publication number
- JP2021080657A JP2021080657AJP2019206716AJP2019206716AJP2021080657AJP 2021080657 AJP2021080657 AJP 2021080657AJP 2019206716 AJP2019206716 AJP 2019206716AJP 2019206716 AJP2019206716 AJP 2019206716AJP 2021080657 AJP2021080657 AJP 2021080657A
- Authority
- JP
- Japan
- Prior art keywords
- data
- unit
- operator
- skill
- evaluation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000010276constructionMethods0.000titleclaimsdescription10
- 238000011156evaluationMethods0.000claimsabstractdescription94
- 238000004364calculation methodMethods0.000claimsabstractdescription57
- 238000000034methodMethods0.000abstractdescription5
- 238000010586diagramMethods0.000abstractdescription2
- 239000013598vectorSubstances0.000description13
- 230000001133accelerationEffects0.000description5
- 239000008186active pharmaceutical agentSubstances0.000description5
- 238000012545processingMethods0.000description4
- 238000004891communicationMethods0.000description3
- 238000013500data storageMethods0.000description3
- 238000012986modificationMethods0.000description3
- 230000004048modificationEffects0.000description3
- 238000003745diagnosisMethods0.000description1
- 230000007704transitionEffects0.000description1
Images







Landscapes
- Component Parts Of Construction Machinery (AREA)
Abstract
Translated fromJapaneseDescription
Translated fromJapanese本発明は、評価対象オペレータによって実施された所定の動作の技量を表示する操作対象装置及びそれに関連する技術に関する。 The present invention relates to an operation target device for displaying the skill of a predetermined operation performed by an evaluation target operator and a technique related thereto.
従来、運転条件を予め入力させることにより、運転結果を自動的に診断できるようにした建設機械の運転評価システムが提案されている。 Conventionally, a construction machine operation evaluation system has been proposed in which an operation result can be automatically diagnosed by inputting an operation condition in advance.
例えば、特許文献1に記載の運転評価システムは、所定の運転データを記憶する運転データ記憶手段(6C)と、所定の運転データに基づいて診断用データを生成する診断用データ生成手段(8A)と、診断用データを記憶する診断用データ記憶手段(8B)と、診断用データと比較するための基準データを記憶する基準データ記憶手段(7C)とを備えている(特許文献1の図1参照)。 For example, the operation evaluation system described in Patent Document 1 includes an operation data storage means (6C) that stores predetermined operation data and a diagnostic data generation means (8A) that generates diagnostic data based on the predetermined operation data. A diagnostic data storage means (8B) for storing diagnostic data and a reference data storage means (7C) for storing reference data for comparison with diagnostic data are provided (FIG. 1 of Patent Document 1). reference).
また、特許文献1に記載の運転評価システムは、診断用データと基準データとを比較することにより、診断モードにおける運転の結果を判定する判定手段(8C,8D)と判定結果を出力する出力手段(9)とを備えている。 Further, the operation evaluation system described in Patent Document 1 is a determination means (8C, 8D) for determining an operation result in a diagnosis mode and an output means for outputting the determination result by comparing the diagnostic data with the reference data. (9) is provided.
しかし、特許文献1に記載の運転評価システムでは、診断モードに移行した後、表示部に表示された内容に従ってオペレータが油圧ショベルを運転する必要があり、オペレータの運転を評価できる状況が極めて限定的であるという問題がある。 However, in the operation evaluation system described in Patent Document 1, it is necessary for the operator to operate the hydraulic excavator according to the contents displayed on the display unit after shifting to the diagnostic mode, and the situation in which the operator's operation can be evaluated is extremely limited. There is a problem that it is.
そこで、本発明は、評価対象オペレータによって実施された所定の動作に対する技量を簡易に評価することが可能な操作対象装置及びそれに関連する技術を提供することを目的とする。 Therefore, an object of the present invention is to provide an operation target device capable of easily evaluating a skill for a predetermined operation performed by an evaluation target operator, and a technique related thereto.
上記目的を達成するために、本発明は、操作対象装置であって、オペレータによって操作される操作部と、前記操作部に対する操作量に応じて所定の動作を行う動作部と、事前に実施された前記所定の動作の目標値、前記操作部に対する操作量及び前記動作部の動作量を含む比較用データと前記所定の動作を行ったオペレータの技量を示す特徴量とが関連付けられた演算用データを蓄積したデータベースにアクセスするためのアクセス部と、評価対象オペレータによって実施される前記所定の動作の目標値、前記操作部における操作量及び前記動作部の動作量を評価用データとして取得する取得部と、前記データベースに蓄積された前記演算用データと前記取得部で取得した前記評価用データとに基づいて前記評価対象オペレータによって実施された前記所定の動作の技量を演算する演算部と、前記演算部で演算した技量を表示する表示部と、を備え、前記演算部は、前記評価用データと前記データベースに蓄積された全ての比較用データとの各距離を演算して前記評価用データに近い所定数の比較用データを特定し、前記所定数の比較用データの各特徴量に基づいて前記技量を演算することを特徴とする操作対象装置を提供している。 In order to achieve the above object, the present invention is an operation target device, in which an operation unit operated by an operator and an operation unit that performs a predetermined operation according to an operation amount with respect to the operation unit are implemented in advance. Calculation data in which comparison data including a target value of the predetermined operation, an operation amount for the operation unit, and an operation amount of the operation unit are associated with a feature amount indicating the skill of an operator who has performed the predetermined operation. An access unit for accessing the database in which the data is stored, and an acquisition unit that acquires the target value of the predetermined operation performed by the evaluation target operator, the operation amount in the operation unit, and the operation amount of the operation unit as evaluation data. And the calculation unit that calculates the skill of the predetermined operation performed by the evaluation target operator based on the calculation data stored in the database and the evaluation data acquired by the acquisition unit, and the calculation. The calculation unit includes a display unit that displays the skill calculated by the unit, and the calculation unit calculates each distance between the evaluation data and all the comparison data stored in the database and is close to the evaluation data. Provided is an operation target device characterized in that a predetermined number of comparison data is specified and the skill is calculated based on each feature amount of the predetermined number of comparison data.
ここで、前記演算部は、前記所定数の比較用データの各特徴量を前記評価対象データと前記所定数の比較用データとの各距離に基づいて重み付けし、重み付けされた各特徴量に基づいて前記評価対象オペレータによって実施された前記所定の動作の技量を演算することが好ましい。 Here, the calculation unit weights each feature amount of the predetermined number of comparison data based on each distance between the evaluation target data and the predetermined number of comparison data, and is based on each weighted feature amount. It is preferable to calculate the skill of the predetermined operation performed by the evaluation target operator.
また、前記演算部で演算した技量を前記表示部に表示するか否かを前記評価対象オペレータが選択するための選択部を更に備え、前記表示部は、前記選択部を介して前記評価対象オペレータが表示することを選択した場合に、前記演算部で演算した技量を表示することが好ましい。 Further, the evaluation target operator further includes a selection unit for selecting whether or not to display the skill calculated by the calculation unit on the display unit, and the display unit is provided with the evaluation target operator via the selection unit. When is selected to be displayed, it is preferable to display the skill calculated by the calculation unit.
さらに、本発明は、建設機械であって、オペレータによって操作される操作レバーと、前記操作レバーに対する操作量に応じて旋回動作を行う上部旋回体と、事前に実施された前記旋回動作の目標値、前記操作レバーに対する操作量及び前記上部旋回体の旋回角度を含む比較用データと前記旋回動作を行ったオペレータの技量を示す特徴量とが関連付けられた演算用データを蓄積したデータベースにアクセスするためのアクセス部と、評価対象オペレータによって実施される前記旋回動作の目標値、前記操作レバーに対する操作量及び前記上部旋回体の旋回角度を評価用データとして取得する取得部と、前記データベースに蓄積された前記演算用データと前記取得部で取得した前記評価用データとに基づいて前記評価対象オペレータによって実施された前記旋回動作の技量を演算する演算部と、前記演算部で演算した技量を表示する表示部と、を備え、前記演算部は、前記評価用データと前記データベースに蓄積された全ての比較用データとの各距離を演算して前記評価用データに近い所定数の比較用データを特定し、前記所定数の比較用データの各特徴量に基づいて前記技量を演算することを特徴とする建設機械を更に提供している。 Further, the present invention is a construction machine, in which an operation lever operated by an operator, an upper swivel body that performs a swivel operation according to an operation amount with respect to the operation lever, and a target value of the swivel operation performed in advance. To access a database accumulating calculation data in which comparison data including the operation amount for the operation lever and the turning angle of the upper swivel body and a feature amount indicating the skill of the operator who performed the turning operation are associated with each other. The access unit, the acquisition unit that acquires the target value of the turning operation performed by the operator to be evaluated, the amount of operation with respect to the operating lever, and the turning angle of the upper turning body as evaluation data, and the acquisition unit stored in the database. A display that displays a calculation unit that calculates the skill of the turning operation performed by the evaluation target operator based on the calculation data and the evaluation data acquired by the acquisition unit, and a skill calculated by the calculation unit. The calculation unit is provided with a unit, and the calculation unit calculates each distance between the evaluation data and all the comparison data stored in the database to specify a predetermined number of comparison data close to the evaluation data. Further, there is provided a construction machine characterized in that the skill is calculated based on each feature amount of the predetermined number of comparison data.
本発明によれば、データベースに蓄積された演算用データと取得部で取得した評価用データとに基づいて評価対象オペレータによって実施された所定の動作の技量が演算される。そして、演算用データ及び評価用データには所定の動作の目標値が含まれているため、当該目標値によって所定の動作を特定することが可能となり、評価対象オペレータによる各種の動作に対する技量を演算することが可能である。そのため、汎用性が高く、評価対象オペレータによって実施された所定の動作に対する技量を簡易に評価することが可能である。 According to the present invention, the skill of a predetermined operation performed by the evaluation target operator is calculated based on the calculation data stored in the database and the evaluation data acquired by the acquisition unit. Since the calculation data and the evaluation data include the target value of the predetermined operation, it is possible to specify the predetermined operation by the target value, and the skill for various operations by the evaluation target operator is calculated. It is possible to do. Therefore, the versatility is high, and it is possible to easily evaluate the skill for a predetermined operation performed by the operator to be evaluated.
<1.実施形態>
本発明の実施形態による操作対象装置及び建設機械について、図1から図8を参照しながら説明する。以下では、操作対象装置及び建設機械の一例として、図1に示す油圧ショベル1を例示する。<1. Embodiment>
The operation target device and the construction machine according to the embodiment of the present invention will be described with reference to FIGS. 1 to 8. In the following, the hydraulic excavator 1 shown in FIG. 1 will be illustrated as an example of the operation target device and the construction machine.
図1に示すように、油圧ショベル1は、下部走行体2と、下部走行体2上に旋回可能に設けられた上部旋回体3とを備えて構成される。 As shown in FIG. 1, the hydraulic excavator 1 includes a lower
上部旋回体3は、オペレータが油圧ショベル1を操作(操縦)するための運転室(キャブ)4を備えている。 The
運転室4の内部には、操作レバー41(図2参照)や表示ディスプレイ43(図2参照)等が設けられている。なお、運転室4の内部には、操作レバー41や表示ディスプレイ43以外にも操作ペダル等の他の機器も設けられているが、本発明とは直接関係しないため、説明を省略する。 An operation lever 41 (see FIG. 2), a display display 43 (see FIG. 2), and the like are provided inside the driver's cab 4. In addition to the
操作レバー41は、本発明に係る操作部の一例であり、上部旋回体3を旋回動作させる際にオペレータによって操作される部位である。上部旋回体3は、本発明に係る動作部の一例であり、操作レバー41に対する操作量に応じた旋回角度だけ旋回する。なお、旋回角度は本発明に係る動作量の一例である。 The
本実施形態では、本発明に係る「所定の動作」の一例として、上部旋回体3の「90度旋回動作」を例示する。図3に示すように、90度旋回動作は、オペレータが操作レバー41を操作することにより、上部旋回体3を下部走行体2に対して90度旋回させる動作である。90度旋回動作が実施されると、上部旋回体3は、図3(A)に示す状態から図3(B)に示す状態を経て、最終的に図3(C)に示す状態に遷移する。 In the present embodiment, as an example of the "predetermined operation" according to the present invention, the "90 degree turning operation" of the upper rotating
以下の説明では、90度旋回操作に関して、操作レバー41に対する操作された操作量を「操作量u」、操作量uに応じた旋回角度を「旋回角度y」、目標値(目標角度)を「目標値r」とも称する。 In the following description, regarding the 90-degree turning operation, the operated amount for the
また、90度旋回動作における各時刻tの操作量uを操作量u(t)、90度旋回動作における各時刻tの旋回角度yを旋回角度y(t)、90度旋回動作における各時刻tの目標値rを目標値r(t)とも称する。 Further, the operation amount u at each time t in the 90-degree turning operation is the operation amount u (t), the turning angle y at each time t in the 90-degree turning operation is the turning angle y (t), and each time t in the 90-degree turning operation. The target value r of is also referred to as a target value r (t).
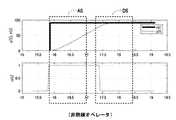
図4のグラフは、熟練オペレータによって実施された90度旋回動作に関するデータ(下記の表1に示されるデータ)をプロットしたものである。具体的には、図4の上側のグラフが90度旋回動作について目標値r(t)及び旋回角度y(t)をプロットしたものであり、図4の下側のグラフが90度旋回動作について操作量u(t)をプロットしたものである。
なお、目標値r(t)は、図4及び表1に示すように、操作開始時(開始時刻t=6.4)に0度から90度に変化した後は一定である。 As shown in FIGS. 4 and 1, the target value r (t) is constant after changing from 0 degrees to 90 degrees at the start of the operation (start time t = 6.4).
また、図5のグラフは、非熟練オペレータによって実施された90度旋回動作に関するデータをプロットしたものである。図4のグラフと同様に、図5の上側のグラフが90度旋回動作について目標値r(t)及び旋回角度y(t)をプロットしたものであり、図5の下側のグラフが90度旋回動作について操作量u(t)をプロットしたものである。 Further, the graph of FIG. 5 is a plot of data relating to a 90-degree turning motion performed by an unskilled operator. Similar to the graph of FIG. 4, the upper graph of FIG. 5 is a plot of the target value r (t) and the turning angle y (t) for the 90 degree turning motion, and the lower graph of FIG. 5 is 90 degrees. The operation amount u (t) is plotted for the turning motion.
90度旋回動作のうち前半が加速区間AS、後半が減速区間DSとした場合、図4及び図5に示すように、加速区間ASにおいては熟練オペレータと非熟練オペレータとのデータに大きな差はない。一方、減速区間DSにおいては熟練オペレータと非熟練オペレータとのデータに顕著な差が生じる。換言すれば、加速区間ASでは旋回角度y(t)や操作量u(t)に基づき技量(熟練オペレータであるか、非熟練オペレータであるか)を判定し難いものの、減速区間DSでは旋回角度y(t)や操作量u(t)に基づき技量を判定することが可能である。 When the first half of the 90-degree turning operation is the acceleration section AS and the second half is the deceleration section DS, as shown in FIGS. 4 and 5, there is no significant difference in the data between the skilled operator and the unskilled operator in the acceleration section AS. .. On the other hand, in the deceleration section DS, there is a significant difference in the data between the skilled operator and the unskilled operator. In other words, in the acceleration section AS, it is difficult to determine the skill (whether it is a skilled operator or an unskilled operator) based on the turning angle y (t) and the operation amount u (t), but in the deceleration section DS, the turning angle. It is possible to determine the skill based on y (t) and the operation amount u (t).
再度図2を参照し、その他の構成について説明する。図2に示すように、油圧ショベル1は、上述した操作レバー41及び表示ディスプレイ43に加え、通信部5及びコントローラ6を備えている。 Other configurations will be described with reference to FIG. 2 again. As shown in FIG. 2, the hydraulic excavator 1 includes a
通信部5は、本発明に係るアクセス部の一例であり、ネットワーク(有線、無線を問わない)を介してデータベースDBにアクセスするための処理部である。データベースDBには、熟練オペレータによる90度旋回動作に関する熟練OPデータや非熟練オペレータによる90度旋回動作に関する非熟練OPデータが演算用データとして蓄積されている。なお、本実施形態では、データベースDBが油圧ショベル1の外部に設けられ、ネットワークを介してアクセス可能に構成される場合を例示するが、これに限定されず、油圧ショベル1の内部の記憶装置にデータベースDBを構築するようにしてもよい。 The
コントローラ6は、油圧ショベル1の各種動作を制御する制御部であり、取得部61と演算部63と表示制御部65とを備えて構成される。 The
取得部61は、本発明に係る取得部の一例であり、オペレータによって実施される90度旋回動作の目標値r(t)、操作レバー41に対する操作量u(t)及び上部旋回体3の旋回角度y(t)、y(t−1)、y(t−2)を取得する処理部である。 The
演算部63は、本発明に係る演算部の一例であり、データベースDBに蓄積された演算用データと取得部61で取得した評価用データとに基づいて評価対象オペレータによって実施された90度旋回動作の技量を演算する処理部である。 The
表示制御部65は、演算部63で演算した技量を表示ディスプレイ43に表示する処理部である。 The
データベースDBには、熟練オペレータ及び非熟練オペレータによって事前に行われた90度旋回動作に関する演算用データΦ(t)が複数蓄積されている。 In the database DB, a plurality of calculation data Φ (t) related to the 90-degree turning operation performed in advance by a skilled operator and an unskilled operator are stored.
演算用データΦ(t)は、比較用データφ(t)と特徴ベクトルθ(t)とが紐付けられたデータであり、下記の数式1によって定義される。
上記の数式1において、比較用データφ(t)は、熟練オペレータ及び非熟練オペレータによって事前に実施された90度旋回動作において取得部61が取得した目標値r(t)、旋回角度y(t)、y(t−1)、y(t−2)、操作量u(t−1)を要素とするものであり、下記の数式2によって定義される。
また、上記の数式1において、特徴ベクトルθ(t)は、本発明に係る特徴量の一例であり、オペレータの技量を数字で表現したものである。詳細には、特徴ベクトルθ(t)には、オペレータの技量が熟練の場合には「1」が入力され、オペレータの技量が非熟練の場合には「0」が入力される。 Further, in the above equation 1, the feature vector θ (t) is an example of the feature amount according to the present invention, and represents the skill of the operator numerically. Specifically, "1" is input to the feature vector θ (t) when the operator's skill is skilled, and "0" is input when the operator's skill is unskilled.
なお、特徴ベクトルθ(t)として、オペレータ自身が主観的に判断した技量の値が入力されるようにしてもよく、管理者等の第三者によって評価された客観的な技量の値が入力されるようにしてもよい。あるいは、特徴ベクトルθ(t)として、AI技術等を用いて自動的に判別された技量の値が入力されるようにしてもよい。 As the feature vector θ (t), the value of the skill subjectively judged by the operator may be input, and the value of the objective skill evaluated by a third party such as an administrator may be input. It may be done. Alternatively, as the feature vector θ (t), the value of the skill automatically determined by using the AI technique or the like may be input.
上記の数式2において、1番目の要素r(t)は時刻tの目標値rである。また、2番目の要素y(t)は時刻tの旋回角度y、3番目の要素y(t−1)は時刻t−1の旋回角度y、4番目の要素y(t−2)は時刻t−2の旋回角度yである。更に、5番目の要素u(t−1)は時刻t−1の操作量uである。旋回角度yに関し、y(t),y(t−1),y(t−2)の3つを比較用データφ(t)の要素しているのは、動的な挙動(ダイナミクス)を考慮しているからである。なお、ダイナミクスは下記の数式3を用いて線形近似することが可能である。
データベースDBには、上述した演算用データΦ(t)がN個蓄積されており、上述した比較用データφ(t)もN個蓄積されている。以下では、N個の比較用データφ(t)を比較用データφ(j)(j=1,2,…,N)と定義して説明を行う。 In the database DB, N pieces of the above-mentioned calculation data Φ (t) are stored, and N pieces of the above-mentioned comparison data φ (t) are also stored. In the following, N comparison data φ (t) will be defined as comparison data φ (j) (j = 1, 2, ..., N) for explanation.
続いて、データベースDBに蓄積された演算用データΦ(t)を用いて、90度旋回動作を実施する評価対象オペレータの技量を評価する方法について詳細に説明する。 Subsequently, a method of evaluating the skill of the evaluation target operator who performs the 90-degree turning operation by using the calculation data Φ (t) accumulated in the database DB will be described in detail.
評価対象オペレータによって90度旋回動作が実施される期間中、取得部61は、目標値r(t)、旋回角度y(t)、y(t−1)、y(t−2)及び操作量u(t)を評価用データφ(t)として随時取得する。 During the period in which the 90-degree turning operation is performed by the operator to be evaluated, the
また、演算部63は、取得部61で取得した評価用データφ(t)と比較用データφ(j)(j=1,2,…,N)との距離d(φ(t),φ(j))を随時演算する。距離d(φ(t),φ(j))は、下記の数式4に基づいて算出される。
上記の数式4において、φ(t)は評価用データであり、φ(j)はデータベースDBに蓄積された比較用データである。φl(t)は評価用データのl番目の要素であり、φl(j)は比較用データのl番目の要素に対応する。例えば、φ2(t)は評価用データφ(t)の2番目の要素y(t−1)に対応し、φ2(j)は比較用データφ(j)の2番目の要素y(t−1)に対応する。In the above formula 4, φ (t) is the evaluation data, and φ (j) is the comparison data stored in the database DB. φl (t) corresponds to the l-th element of the evaluation data, and φl (j) corresponds to the l-th element of the comparison data. For example, φ2 (t) corresponds to the second element y (t-1) of the evaluation data φ (t), and φ2 (j) is the second element y (of the comparison data φ (j)). Corresponds to t-1).
また、上記の数式4において、maxφl(m)はl番目の要素の最大値であり、minφl(m)はl番目の要素の最小値である。φl(t)とφl(j)との差分をmaxφl(m)とminφl(m)との差分で除算することで各要素間の値を正規化している。Further, in the above formula 4, maxφl (m) is the maximum value of the l-th element, and minφl (m) is the minimum value of the l-th element. It is normalized values between the elements by dividing the difference between φl (t) and φl (j) in the difference Maxfail and (m) minφl and (m).
また、nrは目標値rの要素数、nyは旋回角度yの要素数、nuは操作量uの要素数である。ここでは、目標値rの要素数が「1」、旋回角度yの要素数が「3」、操作量uの要素数が「1」であるから、nr+ny+nu=5である。Further, nr is the number of elements of the target value r, ny is the number of elements of the turning angle y, and nu is the number of elements of the manipulated variable u. Here, since the number of elements of the target value r is “1”, the number of elements of the turning angle y is “3”, and the number of elements of the manipulated variable u is “1”, nr + ny + nu = 5.
次に、演算部63は、上記の数式4で算出された距離d(φ(t),φ(j))に基づいて、評価用データφ(t)に近いk個(本実施形態では5個)の比較用データφ(j)を特定する。 Next, the
k個の比較用データφ(j)を特定した後、演算部63は、k個の比較用データφ(j)にそれぞれ紐付けられた特徴ベクトルθ(i)(i=1,2,…,k)を参照し、下記の数式5に従って定量的な技量μ(t)を演算する。
上記の数式5において、ωiは、特徴ベクトルθ(i)を距離d(φ(t),φ(j))に応じて重み付けするための重み付け係数であり、下記の数式5で定義される。
上記の数式5によれば、技量μ(t)の演算において、特徴ベクトルθ(i)に距離d(φ(t),φ(j))に応じたωi(上記の数式6)が積算される。そのため、距離d(φ(t),φ(j))が大きい、すなわち、比較用データφ(j)が評価用データφ(t)から遠い場合には特徴ベクトルθ(i)の重み付け係数ωiが小さくなる。逆に、距離dが小さい、すなわち、比較用データφ(j)が評価用データφ(t)から近い場合には、特徴ベクトルθ(i)の重み付け係数ωiが大きくなる。According to the
下記の表2の例では、非熟練オペレータ(θ(5))に対応するω5が「1/20」である一方、熟練オペレータ(θ(1)、θ(2)、θ(3)、θ(4))に対応するω1、ω2、ω3、ω4がそれぞれ「1/20」、「2/10」、「4/10」「3/10」である。つまり、重み付けω1を除き、熟練オペレータの重み付けω2,ω3,ω4は非熟練オペレータの重み付けω5よりも大きい。そのため、下記の表2の例では、熟練オペレータのデータが含まれているものの、最終的な技量μ(t)の値は「9.5/10」(熟練を示す「1」に近い値)となり、技量が「熟練」と判断される。
図6は、熟練の評価対象オペレータによって実施された90度旋回動作について演算部63で演算した技量をプロットしたグラフである。また、図7は、非熟練の評価対象オペレータによって実施された90度旋回動作について演算部63で演算した技量をプロットしたグラフである。 FIG. 6 is a graph plotting the skills calculated by the
図6及び図7を比較すると、加速区間ASにおいては両者の技量に大きな差は見られないが、減速区間DSにおいては熟練オペレータのスコアが「1」に近く、非熟オペレータのスコアが「0」に近くなっている。 Comparing FIGS. 6 and 7, there is no significant difference in skill between the two in the acceleration section AS, but in the deceleration section DS, the score of the skilled operator is close to "1" and the score of the inexperienced operator is "0". Is close to.
評価対象オペレータによる90度旋回動作が終了すると、表示制御部65は、図8に示すような評価画像GA1や評価画像GA2を表示ディスプレイ43に表示する。 When the 90-degree turning operation by the evaluation target operator is completed, the
評価画像GA1及び評価画像GA2は、演算部63で演算した技量を示す画像の一例である。評価画像GA1及び評価画像GA2には、技量をプロットしたグラフと当該技量の平均値(「52.37」や「60.01」)とが含まれる。なお、評価画像GA1及び評価画像GA2では、ユーザが認識し易いように技量が0から100のスケール(パーセント)で表示されている。 The evaluation image GA1 and the evaluation image GA2 are examples of images showing the skill calculated by the
上述した実施形態によれば、データベースDBに蓄積された演算用データΦ(t)と取得部61で取得した評価用データφ(t)とに基づいて評価対象オペレータによって実施された90度旋回動作の技量が演算される。詳細には、評価用データφ(t)に近いk個の比較用データφ(j)を特定し、特定したk個の比較用データφ(j)にそれぞれ紐付けられた特徴ベクトルθ(t)に基づいて技量が演算される。k個の比較用データφ(j)の特定において、評価用データφ(t)と比較用データφ(j)との距離d(φ(t),φ(j))が算出される。距離d(φ(t),φ(j))の計算においては、両者の目標値r(t)が比較されるため、データベースDBに旋回動作以外の他の動作に対応する演算用データΦ(t)が含まれていたとしても当該他の動作のデータは自動的に除外される。つまり、本実施形態では、距離d(φ(t),φ(j))の計算において目標値r(t)を比較することで、評価対象オペレータによる各種の動作が自動的に峻別される。そのため、汎用性が高く、評価対象オペレータによる所定の動作の技量を簡易に評価することが可能である。 According to the above-described embodiment, the 90-degree turning operation performed by the evaluation target operator based on the calculation data Φ (t) stored in the database DB and the evaluation data φ (t) acquired by the
また、上述した実施形態によれば、評価対象オペレータによって90度旋回動作が実施されている期間中、目標値r(t)、旋回角度y(t)、y(t−1)、y(t−2)及び操作量u(t)が評価用データφ(t)として随時取得される。また、評価用データφ(t)と比較用データφ(j)(j=1,2,…,N)との距離d(φ(t),φ(j))も随時演算される。そのため、評価対象オペレータによる90度旋回動作をリアルタイムに評価することが可能である。 Further, according to the above-described embodiment, the target values r (t), the turning angle y (t), y (t-1), and y (t) during the period when the 90-degree turning operation is performed by the evaluation target operator. -2) and the manipulated variable u (t) are acquired as evaluation data φ (t) at any time. Further, the distance d (φ (t), φ (j)) between the evaluation data φ (t) and the comparison data φ (j) (j = 1, 2, ..., N) is also calculated at any time. Therefore, it is possible to evaluate the 90-degree turning operation by the evaluation target operator in real time.
また、上述した実施形態によれば、技量μ(t)の演算において、特徴ベクトルθ(i)が重み付け係数ωiによって重み付けされる。そのため、本来の技量とは異なる技量の比較用データφ(j)が評価用データφ(t)の近傍データとして局所的に特定されたとしても、他の近傍データよりも距離が遠ければ、重み付け係数ωiが小さくなるため、正確な技量を算出することが可能である。Further, according to the above-described embodiment, the feature vector θ (i) is weighted by the weightingcoefficient ω i in the calculation of the skill μ (t). Therefore, even if the comparison data φ (j) of the skill different from the original skill is locally specified as the neighborhood data of the evaluation data φ (t), if the distance is farther than the other neighborhood data, the weighting is performed. Since the coefficient ωi becomes small, it is possible to calculate an accurate skill.
<2.変形例>
本発明による操作対象装置及び建設機械は上述した実施の形態に限定されず、特許請求の範囲に記載した範囲で種々の変形や改良が可能である。<2. Modification example>
The operation target device and the construction machine according to the present invention are not limited to the above-described embodiment, and various modifications and improvements can be made within the scope described in the claims.
例えば、上述した実施形態では、評価対象オペレータによる90度旋回動作が終了した後に図8に示す評価画像GA1や評価画像GA2が表示される場合を例示したが、これに限定されない。評価対象オペレータによって90度旋回動作が実施されている最中に、演算部63で演算された技量をリアルタイムに表示するようにしてもよい。 For example, in the above-described embodiment, the case where the evaluation image GA1 and the evaluation image GA2 shown in FIG. 8 are displayed after the 90-degree turning operation by the evaluation target operator is completed is illustrated, but the present invention is not limited to this. While the 90-degree turning operation is being performed by the evaluation target operator, the skill calculated by the
また、上述した実施形態では、評価対象オペレータの技量が評価画像GA1や評価画像GA2として一律に表示される場合を例示したが、これに限定されない。熟練オペレータといった技量評価を必要としないオペレータが90度旋回動作を実施する場合、評価画像GA1や評価画像GA2が表示されないように、事前に表示有無を選択できるようにしてもよい。具体的には、90度旋回動作を実施する前に、技量評価の表示可否を選択するための選択画面を表示ディスプレイ43に表示し、当該選択画面を介してオペレータが技量評価を表示することを選択した場合にのみ当該技量評価を表示するようにしてもよい。当該変形例によれば、技量評価を確認したい評価対象オペレータに対してのみ技量評価に関する画面を表示することが可能である。 Further, in the above-described embodiment, the case where the skill of the operator to be evaluated is uniformly displayed as the evaluation image GA1 and the evaluation image GA2 is illustrated, but the present invention is not limited to this. When an operator who does not require skill evaluation, such as a skilled operator, performs a 90-degree turning operation, it may be possible to select whether or not to display the evaluation image GA1 and the evaluation image GA2 in advance so that the evaluation image GA1 and the evaluation image GA2 are not displayed. Specifically, before performing the 90-degree turning operation, a selection screen for selecting whether or not to display the skill evaluation is displayed on the
また、上述した実施形態では、演算用データφ(t)が5つの要素(r(t)、y(t)、y(t−1)、y(t−2)、u(t−1))で構成される場合を例示したが、これに限定されず、演算用データφ(t)がより多くの要素を備えて構成されるようにしてもよい。例えば、演算用データφ(t)が7つの要素(r(t)、y(t)、y(t−1)、y(t−2)、y(t−3)、u(t−1)、u(t−2))で構成されるようにしてもよい。その場合、動的な挙動(ダイナミクス)は、下記の数式7を用いて線形近似することが可能である。
また、上述した実施形態では、特徴ベクトルθ(t)に熟練を示す「1」又は非熟練を示す「0」が入力されている場合を例示したが、これに限定されず、熟練を示す「1」及び非熟練を示す「0」に加え、中級レベルを示す「0.5」が入力されるようにしてもよい。 Further, in the above-described embodiment, the case where “1” indicating skill or “0” indicating unskilled is input to the feature vector θ (t) is exemplified, but the present invention is not limited to this, and “1” indicating skill is not limited to this. In addition to "1" and "0" indicating unskilledness, "0.5" indicating an intermediate level may be input.
また、上述した実施形態では、図1に示す油圧ショベル1に本発明の思想を適用する場合を例示したが、これに限定されず、各種操作に応じて所定の動作を行う装置(油圧ショベル1以外の操作対象装置)に本発明を適用するようにしてもよい。 Further, in the above-described embodiment, the case where the idea of the present invention is applied to the hydraulic excavator 1 shown in FIG. 1 is illustrated, but the present invention is not limited to this, and a device (hydraulic excavator 1) that performs a predetermined operation according to various operations. The present invention may be applied to an operation target device other than the above.
以上のように本発明に係る操作対象装置及び建設機械は、オペレータの所定の動作に対する技量を評価するのに適している。 As described above, the operation target device and the construction machine according to the present invention are suitable for evaluating the skill of the operator for a predetermined operation.
1 油圧ショベル、2 下部走行体、3 上部旋回体、4 運転室、5 通信部、
6 コントローラ、41 操作レバー、43 表示ディスプレイ、61 取得部、
63 演算部、65 表示制御部、AS 加速区間、DB データベース、DS 減速区間、
GA1 評価画像、GA2 評価画像1 Excavator, 2 Lower traveling body, 3 Upper swivel body, 4 Driver's cab, 5 Communication part,
6 controller, 41 operation lever, 43 display, 61 acquisition unit,
63 Calculation unit, 65 Display control unit, AS acceleration section, DB database, DS deceleration section,
GA1 evaluation image, GA2 evaluation image
Claims (4)
Translated fromJapaneseオペレータによって操作される操作部と、
前記操作部に対する操作量に応じて所定の動作を行う動作部と、
事前に実施された前記所定の動作の目標値、前記操作部に対する操作量及び前記動作部の動作量を含む比較用データと前記所定の動作を行ったオペレータの技量を示す特徴量とが関連付けられた演算用データを蓄積したデータベースにアクセスするためのアクセス部と、
評価対象オペレータによって実施される前記所定の動作の目標値、前記操作部に対する操作量及び前記動作部の動作量を評価用データとして取得する取得部と、
前記データベースに蓄積された前記演算用データと前記取得部で取得した前記評価用データとに基づいて前記評価対象オペレータによって実施された前記所定の動作の技量を演算する演算部と、
前記演算部で演算した技量を表示する表示部と、
を備え、
前記演算部は、前記評価用データと前記データベースに蓄積された全ての比較用データとの各距離を演算して前記評価用データに近い所定数の比較用データを特定し、前記所定数の比較用データの各特徴量に基づいて前記技量を演算することを特徴とする操作対象装置。It is an operation target device
The operation unit operated by the operator and
An operation unit that performs a predetermined operation according to the amount of operation on the operation unit,
The comparison data including the target value of the predetermined operation performed in advance, the operation amount for the operation unit, and the operation amount of the operation unit is associated with the feature amount indicating the skill of the operator who performed the predetermined operation. An access unit for accessing the database that stores the data for calculation
An acquisition unit that acquires the target value of the predetermined operation performed by the operator to be evaluated, the operation amount for the operation unit, and the operation amount of the operation unit as evaluation data.
A calculation unit that calculates the skill of the predetermined operation performed by the evaluation target operator based on the calculation data stored in the database and the evaluation data acquired by the acquisition unit.
A display unit that displays the skill calculated by the calculation unit, and
With
The calculation unit calculates each distance between the evaluation data and all the comparison data stored in the database, identifies a predetermined number of comparison data close to the evaluation data, and compares the predetermined number. An operation target device characterized in that the skill is calculated based on each feature amount of data for use.
前記表示部は、前記選択部を介して前記評価対象オペレータが表示することを選択した場合に、前記演算部で演算した技量を表示することを特徴とする請求項1又は2に記載の操作対象装置。A selection unit for the evaluation target operator to select whether or not to display the skill calculated by the calculation unit on the display unit is further provided.
The operation target according to claim 1 or 2, wherein the display unit displays the skill calculated by the calculation unit when the evaluation target operator selects to display via the selection unit. apparatus.
オペレータによって操作される操作レバーと、
前記操作レバーに対する操作量に応じて旋回動作を行う上部旋回体と、
事前に実施された前記旋回動作の目標値、前記操作レバーに対する操作量及び前記上部旋回体の旋回角度を含む比較用データと前記旋回動作を行ったオペレータの技量を示す特徴量とが関連付けられた演算用データを蓄積したデータベースにアクセスするためのアクセス部と、
評価対象オペレータによって実施される前記旋回動作の目標値、前記操作レバーに対する操作量及び前記上部旋回体の旋回角度を評価用データとして取得する取得部と、
前記データベースに蓄積された前記演算用データと前記取得部で取得した前記評価用データとに基づいて前記評価対象オペレータによって実施された前記旋回動作の技量を演算する演算部と、
前記演算部で演算した技量を表示する表示部と、
を備え、
前記演算部は、前記評価用データと前記データベースに蓄積された全ての比較用データとの各距離を演算して前記評価用データに近い所定数の比較用データを特定し、前記所定数の比較用データの各特徴量に基づいて前記技量を演算することを特徴とする建設機械。It ’s a construction machine,
The operation lever operated by the operator and
An upper swivel body that swivels according to the amount of operation on the operating lever, and
The comparison data including the target value of the turning operation, the operation amount with respect to the operating lever, and the turning angle of the upper turning body, which were performed in advance, and the feature amount indicating the skill of the operator who performed the turning operation were associated with each other. An access unit for accessing the database that stores arithmetic data,
An acquisition unit that acquires the target value of the turning operation performed by the operator to be evaluated, the amount of operation with respect to the operating lever, and the turning angle of the upper turning body as evaluation data.
A calculation unit that calculates the skill of the turning operation performed by the evaluation target operator based on the calculation data stored in the database and the evaluation data acquired by the acquisition unit.
A display unit that displays the skill calculated by the calculation unit, and
With
The calculation unit calculates each distance between the evaluation data and all the comparison data stored in the database, identifies a predetermined number of comparison data close to the evaluation data, and compares the predetermined number. A construction machine characterized in that the skill is calculated based on each feature amount of data for use.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019206716AJP7365865B2 (en) | 2019-11-15 | 2019-11-15 | Operation target equipment and construction machinery |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019206716AJP7365865B2 (en) | 2019-11-15 | 2019-11-15 | Operation target equipment and construction machinery |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021080657Atrue JP2021080657A (en) | 2021-05-27 |
| JP7365865B2 JP7365865B2 (en) | 2023-10-20 |
Family
ID=75964366
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019206716AActiveJP7365865B2 (en) | 2019-11-15 | 2019-11-15 | Operation target equipment and construction machinery |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7365865B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023068154A1 (en)* | 2021-10-19 | 2023-04-27 | 国立大学法人広島大学 | Work machine control system, work machine, management device, and work machine control method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009235833A (en)* | 2008-03-28 | 2009-10-15 | Komatsu Ltd | Operation evaluation system and operation evaluation method for construction machine |
| JP2015067990A (en)* | 2013-09-27 | 2015-04-13 | ダイキン工業株式会社 | Construction machinery |
| JP2019108721A (en)* | 2017-12-18 | 2019-07-04 | 住友重機械工業株式会社 | Construction machine |
- 2019
- 2019-11-15JPJP2019206716Apatent/JP7365865B2/enactiveActive
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009235833A (en)* | 2008-03-28 | 2009-10-15 | Komatsu Ltd | Operation evaluation system and operation evaluation method for construction machine |
| JP2015067990A (en)* | 2013-09-27 | 2015-04-13 | ダイキン工業株式会社 | Construction machinery |
| JP2019108721A (en)* | 2017-12-18 | 2019-07-04 | 住友重機械工業株式会社 | Construction machine |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023068154A1 (en)* | 2021-10-19 | 2023-04-27 | 国立大学法人広島大学 | Work machine control system, work machine, management device, and work machine control method |
| JP2023061310A (en)* | 2021-10-19 | 2023-05-01 | 国立大学法人広島大学 | Work machine control system, work machine, management device, and work machine control method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7365865B2 (en) | 2023-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5133755B2 (en) | Construction machine operation evaluation system and operation evaluation method | |
| EP3161569B1 (en) | Method and apparatus for providing guidance to an operator of construction machines | |
| AU2016224354B2 (en) | Evaluation apparatus and evaluation method | |
| US7315638B2 (en) | Image display system | |
| US20140315164A1 (en) | System and method for improving operator performance | |
| EP3179226B1 (en) | Vehicle speed pattern display device, program used therefor, running test method, and auto-driving device | |
| JP7609529B2 (en) | Excavator management system, portable terminal for excavator, and program used in portable terminal for excavator | |
| JP5456244B2 (en) | In-vehicle training mode for mobile devices | |
| JP2017156972A (en) | Evaluation device, management device, evaluation system, and evaluation method | |
| CN114423906B (en) | Excavator and management device thereof | |
| JP2021080657A (en) | Operation object device and construction machine | |
| KR20230055479A (en) | Ready-mixed concrete quality image judgment system using artificial intelligence | |
| JP2007014781A (en) | Inspection planning method in magnetic resonance apparatus and magnetic resonance apparatus therefor | |
| JP2020195782A (en) | Ophthalmologic image processing program and oct device | |
| US20170098182A1 (en) | Operator performance monitoring system | |
| CN101849160A (en) | Navigation device, data updating method, and program | |
| CN104463923A (en) | Image display adjusting device, image display adjusting method, and display | |
| WO2020213748A1 (en) | Hyperemia grading provision device and hyperemia grading provision method | |
| JPH10293794A (en) | Insurance diagnosis planning device | |
| JP2022127069A (en) | working machine | |
| JP6358244B2 (en) | MEDICAL IMAGE PROCESSING DEVICE, MEDICAL IMAGE PROCESSING DEVICE CONTROL METHOD, AND PROGRAM | |
| JP2003060914A (en) | Imaging device | |
| JPH07159526A (en) | Tracking device | |
| JP2507439B2 (en) | Image processing device | |
| WO2025126550A1 (en) | State diagnosis system, state diagnosis method, and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20220725 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20230710 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20230718 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20230914 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20231003 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20231010 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:7365865 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 |