JP2021021468A - Gear device and geared motor - Google Patents
Gear device and geared motorDownload PDFInfo
- Publication number
- JP2021021468A JP2021021468AJP2019140036AJP2019140036AJP2021021468AJP 2021021468 AJP2021021468 AJP 2021021468AJP 2019140036 AJP2019140036 AJP 2019140036AJP 2019140036 AJP2019140036 AJP 2019140036AJP 2021021468 AJP2021021468 AJP 2021021468A
- Authority
- JP
- Japan
- Prior art keywords
- gear
- axial direction
- axis
- motor
- output shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246mechanismEffects0.000claimsdescription71
- 230000002093peripheral effectEffects0.000claimsdescription8
- 230000005540biological transmissionEffects0.000description5
- 230000000149penetrating effectEffects0.000description3
- 229920001971elastomerPolymers0.000description2
- 238000003780insertionMethods0.000description2
- 230000037431insertionEffects0.000description2
- 239000000758substrateSubstances0.000description2
- 235000002492Rungia klossiiNutrition0.000description1
- 244000117054Rungia klossiiSpecies0.000description1
- 239000000806elastomerSubstances0.000description1
- 238000001746injection mouldingMethods0.000description1
- 239000002184metalSubstances0.000description1
- 238000000034methodMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 239000000843powderSubstances0.000description1
- 230000036316preloadEffects0.000description1
- 230000008569processEffects0.000description1
- 230000009467reductionEffects0.000description1
- 239000011347resinSubstances0.000description1
- 229920005989resinPolymers0.000description1
Images



Landscapes
- Retarders (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Gears, Cams (AREA)
- General Details Of Gearings (AREA)
Abstract
Description
Translated fromJapanese本発明は、ギヤ装置およびギヤドモータに関する。 The present invention relates to gear devices and geared motors.
近年、スマートフォン等の電子機器の精密化に伴い、より小型かつ高機能なギヤドモータの開発が進められている。例えば、特許文献1には、出力軸の軸ブレを抑制するギヤドモータが開示されている。 In recent years, with the refinement of electronic devices such as smartphones, the development of smaller and more sophisticated geared motors has been promoted. For example,
ギヤドモータの高性能化の一例として、トルクリミッタ機能やバックラッシュ除去機能が求められる場合がある。これらの機能を同時に満たすギヤドモータは、部品点数が増加するとともに大型化するという問題があった。 As an example of improving the performance of a geared motor, a torque limiter function and a backlash removal function may be required. A geared motor that simultaneously satisfies these functions has a problem that the number of parts increases and the size increases.
本発明の一つの態様は、上記問題点に鑑みて、トルクリミッタ機能およびバックラッシュ除去機能を有し、しかも部品点数の増加および大型化を抑制できるギヤ装置およびギヤドモータの提供を目的の一つとする。 In view of the above problems, one aspect of the present invention is to provide a gear device and a geared motor having a torque limiter function and a backlash removing function, and capable of suppressing an increase in the number of parts and an increase in size. ..
本発明のギヤ装置の一つの態様は、出力軸線に沿って延びる出力シャフトと、回転方向および軸方向へ移動可能に前記出力シャフトに支持されるギヤセットと、前記出力シャフトの外周面に設けられ前記ギヤセットの軸方向一方側に位置するフランジ部と、前記ギヤセットの軸方向他方側に位置する弾性部材と、前記出力軸線と平行な中間軸線を中心として回転し前記ギヤセットに噛み合い動力を伝える中間ギヤと、を備える。前記フランジ部と前記ギヤセットとが互いに対向する面には、軸方向に噛み合う山部および谷部がそれぞれ設けられる。前記ギヤセットは、軸方向に並び、一方が他方より歯数が多い一対のギヤを有する。一対の前記ギヤは、互いに相対回転可能であり、互いに向き合う面で面接触する。前記弾性部材は、前記山部を谷部に押し付けるとともに一対の前記ギヤとの間に面圧を付与する。 One aspect of the gear device of the present invention is an output shaft extending along an output axis, a gear set movably supported by the output shaft in the rotational direction and the axial direction, and an outer peripheral surface of the output shaft. A flange portion located on one side in the axial direction of the gear set, an elastic member located on the other side in the axial direction of the gear set, and an intermediate gear that rotates around an intermediate axis parallel to the output axis and transmits power to the gear set. , Equipped with. A mountain portion and a valley portion that mesh with each other in the axial direction are provided on the surfaces of the flange portion and the gear set facing each other. The gear set has a pair of gears that are aligned in the axial direction and one has more teeth than the other. The pair of gears can rotate relative to each other and come into surface contact with each other on facing surfaces. The elastic member presses the peak portion against the valley portion and applies surface pressure between the elastic member and the pair of gears.
本発明の一つの態様によれば、トルクリミッタ機能およびバックラッシュ除去機能を有し、しかも部品点数の増加および大型化を抑制できるギヤ装置およびギヤドモータが提供される。 According to one aspect of the present invention, there is provided a gear device and a geared motor that have a torque limiter function and a backlash removing function, and can suppress an increase in the number of parts and an increase in size.
以下、図面を参照しながら、本発明の実施形態に係るギヤドモータについて説明する。なお、本発明の範囲は、以下の実施の形態に限定されず、本発明の技術的思想の範囲内で任意に変更可能である。 Hereinafter, the geared motor according to the embodiment of the present invention will be described with reference to the drawings. The scope of the present invention is not limited to the following embodiments, and can be arbitrarily changed within the scope of the technical idea of the present invention.
図面においては、適宜3次元直交座標系としてXYZ座標系を示す。以下の説明において特に断りのない限り、モータ軸線J1および出力軸線J4に平行な方向(Z軸方向)を単に「軸方向」と呼び、+Z側を単に軸方向一方側と呼び、−Z側を、単に軸方向他方側と呼ぶ。 In the drawings, the XYZ coordinate system is shown as a three-dimensional Cartesian coordinate system as appropriate. Unless otherwise specified in the following description, the direction parallel to the motor axis J1 and the output axis J4 (Z-axis direction) is simply referred to as "axial direction", the + Z side is simply referred to as one axial direction, and the -Z side is simply referred to as one axial direction. , Simply referred to as the other side in the axial direction.
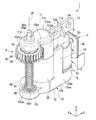
図1は、ギヤドモータ1の斜視図である。図2は、ギヤドモータの断面図である。本実施形態のギヤドモータ1は、Y軸方向に沿う寸法が抑制された薄型の電子機器に搭載される。 FIG. 1 is a perspective view of the geared
図2に示すように、ギヤドモータ1は、モータ2と、フレキシブル基板3と、ギヤ装置5と、フレーム10と、を有する。以下、ギヤドモータ1の各部について詳細に説明する。 As shown in FIG. 2, the geared
<モータ>
モータ2は、例えばステッピングモータである。モータ2は、モータ軸線J1を中心とする略円柱状のモータ本体2aと、モータ本体2aの軸方向他方側の端部から延び出るモータシャフト2bと、ピニオンギヤ2cと、を有する。<Motor>
The
モータ本体2aの内部には、モータシャフト2bに繋がるロータとロータを囲むステータとが設けられる。モータ本体2aの外周面には、4つの端子2pが設けられる。4つの端子2pは、フレキシブル基板3に接続される。 Inside the
モータシャフト2bは、モータ軸線J1を中心として軸方向に延びる。モータシャフト2bは、モータ軸線J1を中心として回転する。ピニオンギヤ2cは、モータシャフト2bに固定される。ピニオンギヤ2cは、ギヤ装置5のドライブギヤ機構20にモータ2の動力を伝達する。 The
<ギヤ装置>
ギヤ装置5は、ドライブギヤ機構20と、中間ギヤ機構30と、出力ギヤ機構40と、を有する。ドライブギヤ機構20は、ドライブ軸線J2を中心として配置される。中間ギヤ機構30は、中間軸線J3を中心として配置される。出力ギヤ機構40は、出力軸線J4を中心として配置される。モータ軸線J1、ドライブ軸線J2、中間軸線J3および出力軸線J4は、互いに平行に延びる。すなわち、モータ軸線J1、ドライブ軸線J2および中間軸線J3は、出力軸線J4と平行である。モータ軸線J1、ドライブ軸線J2、中間軸線J3および出力軸線J4は、軸方向から見てX軸方向に直線状に並ぶ。<Gear device>
The
(ドライブギヤ機構)
ドライブギヤ機構20は、二段ギヤ部材23を有する。二段ギヤ部材23は、軸方向に沿って並んで配置される第1ギヤ21および第2ギヤ22を有する。第1ギヤ21および第2ギヤ22は、ともにドライブ軸線J2を中心とする。(Drive gear mechanism)
The
二段ギヤ部材23には、ドライブ軸線J2に沿って軸方向に貫通する中央孔23aが設けられる。中央孔23aには、フレーム10からドライブ軸線J2を中心として延び出るドライブシャフト15が挿入される。これにより、二段ギヤ部材23は、ドライブ軸線J2を中心として回転可能にフレーム10に支持される。これにより、ドライブギヤ機構20の複数のギヤ(第1ギヤ21および第2ギヤ22)は、ドライブ軸線J2を中心として回転する。 The two-
第1ギヤ21は、ピニオンギヤ2cに噛み合う。これにより、第1ギヤ21は、モータ2から動力が伝達される。第2ギヤ22は、第1ギヤ21と単一の部材である。このため、第2ギヤ22は、第1ギヤ21とともに回転する。第2ギヤ22は、第1ギヤ21に対し軸方向一方側に位置する。第2ギヤ22は、第1ギヤ21より小径のギヤである。第2ギヤ22は、中間ギヤ機構30に接続される。ドライブギヤ機構20は、モータ2の動力を減速して中間ギヤ機構30に伝える。 The
(中間ギヤ機構)
中間ギヤ機構30は、中間軸線J3周りを回転する複数のギヤを有する。中間ギヤ機構30の複数のギヤは、カウンタギヤ31および中間ギヤ39を含む。また、中間ギヤ機構30は、軸方向においてカウンタギヤ31と中間ギヤ39との間に配置される遊星歯車機構32を有する。カウンタギヤ31は、遊星歯車機構32の軸方向他方側に接続される。一方で中間ギヤ39は、遊星歯車機構32の軸方向一方側に接続される。(Intermediate gear mechanism)
The
カウンタギヤ31は、中間軸線J3を中心とする。カウンタギヤ31は、ドライブギヤ機構20の第2ギヤ22に噛み合う。カウンタギヤ31には、中間軸線J3に沿って軸方向に貫通する中央孔31aが設けられる。中央孔31aには、フレーム10から中間軸線J3を中心として延び出る中間シャフト16が挿入される。これにより、カウンタギヤ31は、中間軸線J3を中心として回転可能にフレーム10に支持される。 The
遊星歯車機構32は、第1太陽ギヤ33aと、3つの第1遊星ギヤ33bと、第1キャリア33cと、第2太陽ギヤ34aと、3つの第2遊星ギヤ34bと、第2キャリア34cと、インターナルギヤ35と、を有する。 The
インターナルギヤ35は、中間軸線J3を中心として軸方向に延びる筒状である。インターナルギヤ35は、内周面に設けられたギヤにおいて第1遊星ギヤ33bおよび第2遊星ギヤ34bに噛み合う。インターナルギヤ35は、フレーム10に固定されており回転しない。 The
第1太陽ギヤ33aは、カウンタギヤ31に連結される。第1太陽ギヤ33aは、カウンタギヤ31より小径のギヤである。第1太陽ギヤ33aは、カウンタギヤ31とともに中間軸線J3を中心として回転する。 The first sun gear 33a is connected to the
3つの第1遊星ギヤ33bは、中間軸線J3の周方向に等間隔に配置される。3つの第1遊星ギヤ33bは、第1太陽ギヤ33aに噛み合う。3つの第1遊星ギヤ33bは、第1太陽ギヤ33aの回転に伴い、中間軸線J3の周方向に公転回転する。第1遊星ギヤ33bの中央には、貫通孔33baが設けられる。 The three first planetary gears 33b are arranged at equal intervals in the circumferential direction of the intermediate axis J3. The three first planetary gears 33b mesh with the first sun gear 33a. The three first planetary gears 33b revolve in the circumferential direction of the intermediate axis J3 as the first sun gear 33a rotates. A through hole 33ba is provided in the center of the first planetary gear 33b.
第1キャリア33cは、円盤部33cbと、3本の第1サブシャフト33caと、第1メインシャフト33ccと、を有する。円盤部33cbは、中間軸線J3を中心として径方向に延びる。3本の第1サブシャフト33caは、円盤部33cbから軸方向他方側に延びる。3本の第1サブシャフト33caは、それぞれ第1遊星ギヤ33bの貫通孔33baに挿入される。これにより、第1キャリア33cは、第1サブシャフト33caにおいて第1遊星ギヤ33bを回転可能に支持する。3つの第1遊星ギヤ33bの中間軸線J3を中心とする公転回転に伴い、第1キャリア33cは、中間軸線J3を中心として回転する。第1メインシャフト33ccは、中間軸線J3を中心として円盤部33cbから軸方向一方側に延びる。 The
第2太陽ギヤ34aは、第1メインシャフト33ccの外周面に設けられる。第2太陽ギヤ34aは、第1メインシャフト33ccとともに中間軸線J3を中心として回転する。 The second sun gear 34a is provided on the outer peripheral surface of the first main shaft 33cc. The second sun gear 34a rotates about the intermediate axis J3 together with the first main shaft 33cc.
3つの第2遊星ギヤ34bは、中間軸線J3の周方向に等間隔に配置される。3つの第2遊星ギヤ34bは、第2太陽ギヤ34aに噛み合う。3つの第2遊星ギヤ34bは、第2太陽ギヤ34aの回転に伴い、中間軸線J3の周方向に公転回転する。第2遊星ギヤ34bの中央には、貫通孔34baが設けられる。 The three second
第2キャリア34cは、円盤部34cbと、3本の第2サブシャフト34caと、第2メインシャフト34ccと、を有する。円盤部34cbは、中間軸線J3を中心として径方向に延びる。3本の第2サブシャフト34caは、円盤部34cbから軸方向他方側に延びる。3本の第2サブシャフト34caは、それぞれ第2遊星ギヤ34bの貫通孔34baに挿入される。これにより、第2キャリア34cは、第2サブシャフト34caにおいて第2遊星ギヤ34bを回転可能に支持する。3つの第2遊星ギヤ34bの中間軸線J3を中心とする公転回転に伴い、第2キャリア34cは、中間軸線J3を中心として回転する。第2メインシャフト34ccは、中間軸線J3を中心として円盤部34cbから軸方向一方側に延びる。また、第2メインシャフト34ccの軸方向一方側の先端は、フレーム10により回転可能に支持される。 The
中間ギヤ39は、第2メインシャフト34ccの外周面に設けられる。中間ギヤ39は、第2メインシャフト34ccとともに中間軸線J3を中心として回転する。中間ギヤ39は、出力ギヤ機構40に接続される。 The
本実施形態の中間ギヤ機構30は、軸方向他方側の端部のカウンタギヤ31に伝わったモータ2の動力を軸方向一方側の端部の中間ギヤ39において、出力ギヤ機構40に伝える。中間ギヤ機構30は、中間軸線J3周りに回転する遊星歯車機構32を有する。このため、中間ギヤ機構30は、モータ2の動力を伝達する過程で、動力を減速して出力ギヤ機構40に伝える。また、本実施形態の遊星歯車機構32は、2種の太陽ギヤおよび遊星ギヤを有し2段階に減速される。このため、本実施形態の中間ギヤ機構30によれば、大減速比を実現できる。 The
(出力ギヤ機構)
出力ギヤ機構40は、出力シャフト44と、フランジ部45と、ギヤセット43と、コイルバネ(弾性部材)46と、一対のボールベアリング49A、49Bと、を有する。フランジ部45と、ギヤセット43と、コイルバネ46とは、軸方向一方側から他方側に向かってこの順で配置される。フランジ部45は、出力シャフト44に固定される。コイルバネ46は、ギヤセット43をフランジ部45側に押し付ける。(Output gear mechanism)
The
出力シャフト44は、出力軸線J4に沿って延びる。出力シャフト44は、軸方向一方側に位置する第1端部44aと、軸方向他方側に位置する第2端部44bとを有する。出力シャフト44の両端部(第1端部44aおよび第2端部44b)は、それぞれボールベアリング49A、49Bにより出力軸線J4周りに回転可能に支持される。一対のボールベアリング49A、49Bは、フレーム10に保持される。なお、以下の説明において、一対のボールベアリング49A、49Bのうち、第1端部44aを支持する一方を第1ボールベアリング49Aと呼び、第2端部44bを支持する他方を第2ボールベアリング49Bと呼ぶ。 The
出力シャフト44の外周面には、径方向外側に延びるフランジ部45が設けられる。フランジ部45は、出力シャフト44共に出力軸線J4周りに回転する。本実施形態において、出力シャフト44とフランジ部45とは単一の部材である。しかしながら、出力シャフト44とフランジ部45とは、互いに固定されていれば別部材であってもよい。 A
フランジ部45は、ギヤセット43の軸方向一方側に位置する。フランジ部45は、出力軸線J4を中心とする円形である。フランジ部45は、軸方向一方側を向く第1対向面45aと、軸方向他方側を向く第2対向面45fを有する。 The
第1対向面45aは、出力軸線J4に直交する平坦面である。第1対向面45aは、第1ボールベアリング49Aと軸方向に対向する。第1対向面45aは、第1ボールベアリング49Aの内輪と接触する。 The first facing
図3は、出力ギヤ機構40の一部を拡大した正面図である。
第2対向面45fは、ギヤセット43と軸方向に対向する。第2対向面45fには、軸方向他方側に突出し周方向に沿って並ぶ複数の第1山部45bが設けられる。FIG. 3 is an enlarged front view of a part of the
The second facing
第1山部45bは、第1頂面部45baと、第1頂面部45baの周方向の両側に位置する一対の第1傾斜側部45bbと、を有する。第1頂面部45baは、軸線と直交する平面状である。第1傾斜側部45bbは、第1頂面部45baから周方向に離れる従い軸方向一方側に傾斜する。本実施形態において、第1傾斜側部45bbは、軸方向に対して45°で傾斜する。 The
周方向に沿って並ぶ第1山部45b同士の間には第1谷部45cが設けられる。第1谷部45cは、第1山部45b同士の間の空間である。第1谷部45cは、軸方向他方側を向く第1底面部45caを有する。フランジ部45の第2対向面45fは、周方向に沿って第1頂面部45ba、第1傾斜側部45bb、第1底面部45caおよび第1傾斜側部45bbが交互に並ぶ波状の面である。 A
図2に示すように、ギヤセット43は、一対のギヤ(メインギヤ41およびサブギヤ42)を有する。メインギヤ41とサブギヤ42とは、互いに別部材である。メインギヤ41とサブギヤ42とは、軸方向に沿って並ぶ。サブギヤ42は、メインギヤ41より歯数が多い。すなわち、ギヤセット43は、一方が他方より歯数が多い一対のギヤ(メインギヤ41およびサブギヤ42)を有する。メインギヤ41およびサブギヤ42は、それぞれ中間ギヤ39に噛み合う。すなわち、ギヤセット43は、中間ギヤ39に噛み合う。中間ギヤ39は、ギヤセット43に動力を伝える。 As shown in FIG. 2, the gear set 43 has a pair of gears (
メインギヤ41には、軸方向に貫通する貫通孔41hが設けられ、サブギヤ42には、軸方向に貫通する貫通孔42hが設けられる。メインギヤ41およびサブギヤ42の貫通孔41h、42hは、直径が略等しい円形である。メインギヤ41の貫通孔41hおよびサブギヤ42の貫通孔42hには、出力シャフト44が挿通される。メインギヤ41およびサブギヤ42の貫通孔41h、42hの直径は、出力シャフト44の貫通孔41h、42hに挿通される部分の外径より若干大きい。したがって、メインギヤ41およびサブギヤ42は、出力シャフト44に対し回転方向および軸方向に移動可能である。すなわち、ギヤセット43は、出力シャフト44に回転方向および軸方向へ移動可能に支持される。また、メインギヤ41とサブギヤ42とは、互いに相対回転可能である。 The
メインギヤ41は、サブギヤ42の軸方向一方側に位置する。メインギヤ41は、サブギヤ42より歯幅(歯の軸方向に沿う寸法)が大きい。 The
メインギヤ41は、軸方向一方側を向く第3対向面41aと、軸方向他方側を向く第4対向面41fと、を有する。第3対向面41aは、軸方向においてフランジ部45に対向し接触する。一方で、第4対向面41fは、軸方向においてサブギヤ42に対向し接触する。 The
図3に示すように、メインギヤ41の第3対向面41aには、フランジ部45の第2対向面45fと同様の周方向に延びる波状の面が設けられる。すなわち、第3対向面41aには、軸方向一方側に突出し周方向に沿って並ぶ複数の第2山部41bが設けられる。 As shown in FIG. 3, the third facing
第2山部41bは、第2頂面部41baと、第2頂面部41baの周方向の両側に位置する一対の第2傾斜側部41bbと、を有する。第2頂面部41baは、軸線と直交する平面状である。第2傾斜側部41bbは、第2頂面部41baから周方向に離れる従い軸方向他方側に傾斜する。本実施形態において、第2傾斜側部41bbは、軸方向に対して45°で傾斜する。周方向に沿って並ぶ第2山部41b同士の間には第2谷部41cが設けられる。第2谷部41cは、軸方向一方側を向く第2底面部41caを有する。 The
メインギヤ41の第3対向面41aの第2山部41bおよび第2谷部41cは、フランジ部45の第2対向面45fの第1山部45bおよび第1谷部45cに噛み合う。より具体的には、第2山部41bが、第1谷部45cに嵌り、第1山部45bが第2谷部41cに嵌る。これに伴い、第2傾斜側部41bbと第1傾斜側部45bbとが互いに接触する。 The
フランジ部45とギヤセット43の山部45b、41bおよび谷部45c、41cが、軸方向に互いに噛み合うことで、ギヤセット43とフランジ部45とが同期回転する。これにより、ギヤセット43に伝わった動力が、フランジ部45を介して出力シャフト44に伝わる。 The
上述したように、ギヤセット43はコイルバネ46によってフランジ部45に押し付けられる。このため、ギヤセット43の回転時に、山部45b、41bおよび谷部45c、41cの噛み合いが維持されて、ギヤセット43の回転がフランジ部45に伝わる。一方で、第1傾斜側部45bbと第2傾斜側部41bbとの間に付与される反力が大きくなり一定の値を超えると、第1傾斜側部45bbと第2傾斜側部41bbとが互いに滑りギヤセット43とフランジ部45との間の動力伝達が切断される。 As described above, the gear set 43 is pressed against the
本実施形態によれば、フランジ部45およびギヤセット43の山部45b、41bおよび谷部45c、41cは、コイルバネ46によって押し付けられて、トルクリミッタとして機能する。トルクリミッタ機能が働く場合としては、例えば、出力シャフト44がロックしたままモータが駆動する場合、出力シャフト44側からギヤセット43側に過度な回転力が付与される場合などが考えられる。本実施形態によれば、出力ギヤ機構40に過大な負荷が作用した場合であってもトルクリミッタ機能によって動力の伝達が切断されることで、モータ2から中間ギヤ機構30への動力伝達経路の各部に過大な負荷が加わることを抑制でき、各部の損傷を抑止できる。
なお、本実施形態では、互いに向かい合う第1傾斜側部45bbと第2傾斜側部41bbとは出力軸線J4に対して互いに反対方向に45°に傾斜する。これらの角度を共に大きくすることで、トルクリミッタ機能において制限されるトルクの閾値を大きくすることができる。According to the present embodiment, the
In the present embodiment, the first inclined side portion 45bb and the second inclined side portion 41bb facing each other are inclined at 45 ° in opposite directions with respect to the output axis J4. By increasing both of these angles, it is possible to increase the torque threshold value limited by the torque limiter function.
図2に示すように、サブギヤ42は、メインギヤ41の軸方向他方側に位置する。サブギヤ42は、軸方向一方側を向く第5対向面42aと、軸方向他方側を向く第6対向面42fと、を有する。第5対向面42aは、軸方向においてメインギヤ41に対向し接触する。一方で、第6対向面42fは、軸方向においてコイルバネ46の軸方向一方側の端部に接触する。 As shown in FIG. 2, the
サブギヤ42の第5対向面42aおよびメインギヤ41の第4対向面41fは、ともに出力軸線J4に直交する平坦面である。第4対向面41fと第5対向面42aとは、互いに接触してコイルバネ46によって面圧が付与される。すなわち、サブギヤ42とメインギヤ41とは、互いに向き合う面で面接触する。 The fifth facing
図4は、ギヤセット43と中間ギヤ39との噛み合いの様子を示す断面図である。図4において、ギヤセット43の回転方向T1および中間ギヤの回転方向T2を図示する。本実施形態において、サブギヤ42の歯数は、メインギヤ41の歯数より1つだけ多い。 FIG. 4 is a cross-sectional view showing how the gear set 43 and the
メインギヤ41は、中間ギヤ39に噛み合って中間ギヤ39の回転に伴い出力軸線J4周りに回転する。この時、メインギヤ41は、回転方向T1を向く歯面で、中間ギヤ39に接触する。一方で、サブギヤ42の歯数がメインギヤ41の歯数より多いため、サブギヤ42の回転速度がメインギヤ41の回転より遅くなる。すなわち、中間ギヤ39とサブギヤ42とは、その歯数差ために回転速度差が生じる。また、サブギヤ42は、コイルバネ46によりメインギヤ41に押し付けらえて第4対向面41fと第5対向面42aとの間には、摩擦力が発生する。そして、この摩擦力と回転差のために中間ギヤ39は、回転方向T1の反対側を向く歯面で、中間ギヤ39に接触する。結果的に、中間ギヤ39とギヤセット43との間にバックラッシュが除去される。すなわち、ギヤセット43は、バックラッシュ除去機能を有する。 The
図2に示すように、コイルバネ46は、ギヤセット43の軸方向他方側に位置する。コイルバネ46の内径部には、出力シャフト44が通される。コイルバネ46は、ギヤセット43をフランジ部45側に押し付ける。なお、本実施形態では、ギヤセット43をフランジ部45側に押し付ける弾性部材としてコイルバネを採用する例について説明するが、板バネや皿バネ等のそのほかのバネであってもよく、またゴムやエラストマ樹脂等であってもよい。 As shown in FIG. 2, the
コイルバネ46は、コイルバネ本体47と、コイルバネ本体47の両端部に取り付けられる一対のブッシュ部材48と、を有する。 The
ブッシュ部材は48、コイルバネ本体47の内径部に嵌るブッシュ筒部と、ブッシュ筒部の一端から径方向外側に延びるブッシュフランジと、を有する。一対のブッシュ部材48のうち軸方向一方側に位置する一方は、ブッシュフランジにおいて、サブギヤ42の第6対向面42fに接触する。また、一対のブッシュ部材48のうち軸方向他方側に位置する他方は、ブッシュフランジにおいて、第2ボールベアリング49Bの内輪に接触する。 The bush member includes 48, a bush cylinder portion that fits into the inner diameter portion of the
コイルバネ46は、コイルバネ本体47を圧縮した状態でギヤセット43と第2ボールベアリング49Bの内輪との間に挟み込まれる。これにより、ギヤセット43を軸方向一方側に押し付けるとともに、第2ボールベアリング49Bの内輪を軸方向他方側に押し付ける。 The
コイルバネ46は、メインギヤ41およびフランジ部45の山部41b、45bを谷部41c、45cに押し付けるとともにメインギヤ41とサブギヤ42との間に面圧を付与する。すなわち、コイルバネ46の圧縮力は、トルクリミッタ機能およびバックラッシュ除去機能に利用される。本実施形態によれば、1つのコイルバネ46を用いて、トルクリミッタ機能およびバックラッシュ除去機能を得ることができ、部品点数を抑制しコスト削減を図るとともに、ギヤ装置5の小型化を図ることができる。 The
本実施形態によれば、コイルバネ46は、出力シャフト44をフレーム10に対して軸方向の一方側に押し付ける。したがって、コイルバネ46は、出力シャフト44の軸方向のガタを除去することができる。 According to this embodiment, the
本実施形態では、出力シャフト44の両端部が、第1ボールベアリング49Aおよび第2ボールベアリング49Bによって支持される。また、コイルバネ46は、第1ボールベアリング49Aの内輪を、ギヤセット43を介し、軸方向一方側に押し付ける。コイルバネ46は、第2ボールベアリング49Bの内輪を、軸方向他方側に押し付ける。すなわち、コイルバネ46は、一対のボールベアリング49A、49Bの内輪を互いに離間する方向に押し付けて予圧を付与し、ボールベアリング49A、49Bに円滑な回転を実現させる。 In the present embodiment, both ends of the
<フレーム>
図1に示すように、フレーム10は、第1フレーム部材11と第2フレーム部材12とを有する。第1フレーム部材11および第2フレーム部材12は、例えば、金属粉末射出成形(MIM)によって成型される。第1フレーム部材11および第2フレーム部材12は、モータ本体2aに固定される。第1フレーム部材11は、モータ2に対し軸方向一方側に位置する。一方で、第2フレーム部材12は、モータ2に対し軸方向他方側に位置する。<Frame>
As shown in FIG. 1, the
第1フレーム部材11は、モータ支持部11aと、中間ギヤ機構支持部11bと、第1出力シャフト支持部11cと、固定部13と、を有する。 The
モータ支持部11aは、モータ本体2aの軸方向一方側の端部を覆う円盤状である。モータ支持部11aとモータ本体2aとの境界部には、溶接部9が設けられる。これにより、第1フレーム部材11は、溶接部9において、モータ本体2aに溶接固定される。より具体的には、第1フレーム部材11は、モータ本体2aの軸方向一方側の端部に溶接固定される。 The
中間ギヤ機構支持部11bは、中間ギヤ機構30の軸方向一方側に位置する。中間ギヤ機構支持部11bは、筒部11baと、筒部11baの軸方向一方側の端部に位置する底部11bbと、を有する。 The intermediate gear
筒部11baは、軸方向の他方側の端部においてモータ支持部11aに繋がる。筒部11baは、中間ギヤ39を中間軸線J3の径方向外側から囲む。筒部11baには、切欠部11bcが設けられる。切欠部11bcは、中間ギヤ39とギヤセット43とが噛み合う部分に位置する。 The tubular portion 11ba is connected to the
図2に示すように、底部11bbの軸方向他方側を向く底面には、保持穴11bdが設けられる。保持穴11bdには、中間ギヤ機構30の第2メインシャフト34ccが挿入される。これにより、中間ギヤ機構支持部11bは、中間ギヤ機構30の軸方向一方側の端部を支持する。 As shown in FIG. 2, a holding hole 11bd is provided on the bottom surface of the bottom portion 11bb facing the other side in the axial direction. The second main shaft 34cc of the
第1出力シャフト支持部11cは、出力ギヤ機構40の第1ボールベアリング49Aを保持する。第1出力シャフト支持部11cは、第1ボールベアリング49Aを介して出力シャフト44を支持する。第1出力シャフト支持部11cは、第1ボールベアリング49Aの外輪を径方向外側から囲む包囲筒部11caと、包囲筒部11caの上端部から径方向内側に延びる天板部11cbと、を有する。天板部11cbには、出力シャフト44の軸方向一方側の端部が挿通される挿通孔11ccが設けられる。出力シャフト44は、挿通孔11ccを通過した先端において外部装置(図示略)に接続される。 The first output
図1に示すように、固定部13は、X−Z平面に沿って延びる板状である。固定部13は、モータ支持部11aの軸方向一方側を向く面に繋がる。また、固定部13は、中間ギヤ機構支持部11bの筒部11baの外周面に繋がる。固定部13には、板厚方向に貫通する2つの固定孔13aが設けられる。2つの固定孔13aは、出力軸線J4の径方向に沿って並ぶ。2つの固定孔13aには、ギヤドモータ1を外部部材(図示略)に固定するための固定ネジが挿入される。 As shown in FIG. 1, the fixing
本実施形態によれば、第1フレーム部材11は、外部部材に固定するための固定部13を有するとともに、外部装置に動力を伝える出力シャフト44の出力端44pを支持する。すなわち、第1フレーム部材11は、単一の部材において、出力シャフト44を支持するとともに外部部材に固定される。このため、外部部材に対する出力シャフト44の出力端44pの位置精度を高めることができ、外部装置に効率的にモータ2の動力を伝えることができる。 According to the present embodiment, the
本実施形態によれば、第1フレーム部材11は、モータ本体2aの軸方向他方側の端部に固定され、ドライブギヤ機構20を支持し、中間ギヤ機構30の軸方向他方側の端部を支持し、出力シャフト44の軸方向他方側の端部を支持する。すなわち、第1フレーム部材11は、単一の部材によって、ギヤドモータ1の各軸を軸方向他方側から支持することができ、ギヤの軸間距離を高精度に保つことができ、ギヤの回転効率を高めることができる。 According to the present embodiment, the
本実施形態によれば、モータ軸線J1、ドライブ軸線J2、中間軸線J3および出力軸線J4は、軸方向から見て直線状に並ぶ。すなわち、ギヤドモータ1の各シャフトは、一方向に並んで配置され、Y軸方向の寸法を小型化したギヤドモータ1を提供できる。このため、本実施形態によれば、スマートフォンのような薄型危機に搭載可能な、ギヤドモータ1を提供できる。 According to this embodiment, the motor axis J1, the drive axis J2, the intermediate axis J3, and the output axis J4 are aligned linearly when viewed from the axial direction. That is, the shafts of the geared
また、本実施形態によれば、第1フレーム部材11は、モータ本体2aの軸方向一方側の端部に固定され、中間ギヤ機構30の軸方向一方側の端部を支持し、出力シャフト44の出力端である軸方向一方側の端部を支持する。すなわち、第1フレーム部材11は、単一の部材によって、ギヤドモータ1の各軸を軸方向一方側から支持することができ、ギヤの軸間距離を高精度に保つことができ、ギヤの回転効率を高めることができる。 Further, according to the present embodiment, the
第2フレーム部材12は、ギヤケース12aと、第2出力シャフト支持部12cと、一対の梁部14と、を有する。 The
ギヤケース12aは、モータ本体2aの軸方向他方側の端部、ドライブギヤ機構20、中間ギヤ機構30の軸方向他方側の端部を覆う円盤状である。ギヤケース12aは、軸方向と直交する俵型の板部12aaと、板部12aaの外縁から軸方向一方側に延びる外壁部12abと、を有する。板部12aaおよび外壁部12abは、ピニオンギヤ2c、ドライブギヤ機構20および中間ギヤ機構30の軸方向他方側の端部を覆う。 The
ギヤケース12aとモータ本体2aとの境界部には、溶接部9が設けられる。これにより、第2フレーム部材12は、溶接部9において、モータ本体2aに溶接固定される。より具体的には、第2フレーム部材12は、モータ本体2aの軸方向他方側の端部に溶接固定される。 A welded
図3に示すように、また、ギヤケース12aは、ドライブギヤ機構20および中間ギヤ機構30の軸方向他方側に位置する。板部12aaの軸方向一方側を向く底面には、ドライブシャフト15および中間シャフト16が設けられる。ドライブシャフト15は、ドライブ軸線J2を中心として軸方向に延びる。ドライブシャフト15は、ドライブギヤ機構20の二段ギヤ部材23を回転可能に支持する。同様に、中間シャフト16は、中間軸線J3を中心として軸方向に延びる。中間シャフト16は、中間ギヤ機構30のカウンタギヤ31を回転可能に支持する。 As shown in FIG. 3, the
第2出力シャフト支持部12cは、出力ギヤ機構40の第2ボールベアリング49Bを保持する。第2出力シャフト支持部12cは、第2ボールベアリング49Bを介して出力シャフト44を支持する。第2出力シャフト支持部12cは、第2ボールベアリング49Bの外輪を径方向外側から囲む包囲筒部12caと、包囲筒部12caの上端部から径方向内側に延びる天板部12cbと、を有する。 The second output
図1に示すように、梁部14は、ギヤケース12aの外壁部12abから軸方向一方側に延びる。梁部14は、モータ本体2aと遊星歯車機構32との間に位置する。梁部14の軸方向一方側の端部と第1フレーム部材11との境界部には、溶接部9が設けられる。これにより、梁部14の軸方向一方側の端部は、第1フレーム部材11に溶接固定される。 As shown in FIG. 1, the
本実施形態によれば、第1フレーム部材11は、モータ本体2aに溶接固定される。このため、第1フレーム部材11とモータ本体2aとが強固に固定され、モータ2に対する各シャフトの安定性が高まり、動力の伝達効率を高めることができる。同様に、本実施形態によれば、第2フレーム部材12は、モータ本体2aに溶接固定される。このため、モータ2の動力の伝達効率を高めることができる。 According to this embodiment, the
本実施形態によれば、第1フレーム部材11と第2フレーム部材12とが、梁部14を介して互いに溶接接合される。このため、各軸の軸方向両端部同士が互いに位置ずれすることを抑制することができる。なお、本実施形態では第2フレーム部材12が梁部14を有するが、第1フレーム部材11が梁部14を有していてもよい。すなわち、第1フレーム部材11および第2フレーム部材12の何れか一方が、軸方向に沿って他方側に延びて他方側に溶接固定される梁部14を有していればよい。 According to the present embodiment, the
以上に、本発明の実施形態および変形例を説明したが、実施形態における各構成およびそれらの組み合わせ等は一例であり、本発明の趣旨から逸脱しない範囲内で、構成の付加、省略、置換およびその他の変更が可能である。また、本発明は実施形態によって限定されることはない。 Although the embodiments and modifications of the present invention have been described above, the configurations and combinations thereof in the embodiments are examples, and the configurations are added, omitted, replaced, and the like without departing from the spirit of the present invention. Other changes are possible. Moreover, the present invention is not limited to the embodiments.
1…ギヤドモータ、2…モータ、2a…モータ本体、2b…モータシャフト、2c…ピニオンギヤ、5…ギヤ装置、10…フレーム、11…第1フレーム部材、12…第2フレーム部材、13…固定部、14…梁部、20…ドライブギヤ機構、30…中間ギヤ機構、32…遊星歯車機構、39…中間ギヤ、41b,45b…山部、41c,45c…谷部、41…メインギヤ、42…サブギヤ、43…ギヤセット、44…出力シャフト、44p…出力端、45…フランジ部、46…コイルバネ、46…コイルバネ(弾性部材)、49A…ボールベアリング、J1…モータ軸線、J2…ドライブ軸線、J3…中間軸線、J4…出力軸線 1 ... Geared motor, 2 ... Motor, 2a ... Motor body, 2b ... Motor shaft, 2c ... Pinion gear, 5 ... Gear device, 10 ... Frame, 11 ... First frame member, 12 ... Second frame member, 13 ... Fixed part, 14 ... Beam part, 20 ... Drive gear mechanism, 30 ... Intermediate gear mechanism, 32 ... Planetary gear mechanism, 39 ... Intermediate gear, 41b, 45b ... Mountain part, 41c, 45c ... Tani part, 41 ... Main gear, 42 ... Sub gear, 43 ... Gear set, 44 ... Output shaft, 44p ... Output end, 45 ... Flange, 46 ... Coil spring, 46 ... Coil spring (elastic member), 49A ... Ball bearing, J1 ... Motor axis, J2 ... Drive axis, J3 ... Intermediate axis , J4 ... Output axis
Claims (13)
Translated fromJapanese回転方向および軸方向へ移動可能に前記出力シャフトに支持されるギヤセットと、
前記出力シャフトの外周面に設けられ前記ギヤセットの軸方向一方側に位置するフランジ部と、
前記ギヤセットの軸方向他方側に位置する弾性部材と、
前記出力軸線と平行な中間軸線を中心として回転し前記ギヤセットに噛み合い動力を伝える中間ギヤと、を備え、
前記フランジ部と前記ギヤセットとが互いに対向する面には、軸方向に噛み合う山部および谷部がそれぞれ設けられ、
前記ギヤセットは、軸方向に並び、一方が他方より歯数が多い一対のギヤを有し、
一対の前記ギヤは、互いに相対回転可能であり、互いに向き合う面で面接触し、
前記弾性部材は、前記山部を谷部に押し付けるとともに一対の前記ギヤとの間に面圧を付与する、
ギヤ装置。An output shaft that extends along the output axis and
A gear set that is supported by the output shaft so that it can move in the rotational and axial directions,
A flange portion provided on the outer peripheral surface of the output shaft and located on one side in the axial direction of the gear set, and
An elastic member located on the other side in the axial direction of the gear set,
An intermediate gear that rotates around an intermediate axis parallel to the output axis and transmits power by engaging with the gear set is provided.
On the surfaces where the flange portion and the gear set face each other, peaks and valleys that mesh with each other in the axial direction are provided.
The gear set has a pair of gears aligned in the axial direction, one with more teeth than the other.
The pair of gears can rotate relative to each other and come into surface contact with each other on facing surfaces.
The elastic member presses the peak portion against the valley portion and applies surface pressure between the elastic member and the pair of gears.
Gear device.
請求項1に記載のギヤ装置。Both ends of the output shaft are supported by ball bearings, respectively.
The gear device according to claim 1.
請求項2に記載のギヤ装置。The elastic member presses the inner rings of the pair of ball bearings in a direction away from each other.
The gear device according to claim 2.
前記出力軸線に平行なドライブ軸線を中心として回転する複数のギヤを有し前記中間ギヤ機構に動力を伝えるドライブギヤ機構と、を有する、
請求項1〜3の何れか一方に記載のギヤ装置。An intermediate gear mechanism including the intermediate gear and having a plurality of gears rotating around the intermediate axis.
It has a drive gear mechanism having a plurality of gears rotating about a drive axis parallel to the output axis and transmitting power to the intermediate gear mechanism.
The gear device according to any one of claims 1 to 3.
請求項4に記載のギヤ装置。The intermediate gear mechanism has a planetary gear mechanism that rotates around the intermediate axis.
The gear device according to claim 4.
モータ本体、前記モータ本体から延び出て前記出力軸線に平行なモータ軸線を中心として回転するモータシャフトおよび前記モータシャフトに固定され前記ドライブギヤ機構に動力を伝えるピニオンギヤを有するモータと、を備える、
ギヤドモータ。The gear device according to claim 4 or 5.
A motor body, a motor shaft extending from the motor body and rotating about a motor axis parallel to the output axis, and a motor having a pinion gear fixed to the motor shaft and transmitting power to the drive gear mechanism.
Geared motor.
請求項6に記載のギヤドモータ。The motor axis, the drive axis, the intermediate axis, and the output axis are aligned linearly when viewed from the axial direction.
The geared motor according to claim 6.
前記第1フレーム部材は、外部部材に固定するための固定部を有するとともに、外部装置に動力を伝える前記出力シャフトの出力端を支持する、
請求項6又は7に記載のギヤドモータ。It has a first frame member fixed to the motor body, and has
The first frame member has a fixing portion for fixing to the external member and supports the output end of the output shaft that transmits power to the external device.
The geared motor according to claim 6 or 7.
前記モータ本体の軸方向一方側の端部に固定され、
前記中間ギヤ機構の軸方向一方側の端部を支持し、
前記出力シャフトの出力端である軸方向一方側の端部を支持する、
請求項8に記載のギヤドモータ。The first frame member is
It is fixed to one end of the motor body in the axial direction and
Supporting one end of the intermediate gear mechanism in the axial direction,
Supports one end in the axial direction, which is the output end of the output shaft.
The geared motor according to claim 8.
請求項8又は9に記載のギヤドモータ。The first frame member is welded and fixed to the motor body.
The geared motor according to claim 8 or 9.
前記第2フレーム部材は、
前記モータ本体の軸方向他方側の端部に固定され、
前記ドライブギヤ機構を支持し、
前記中間ギヤ機構の軸方向他方側の端部を支持し、
前記出力シャフトの軸方向他方側の端部を支持する、
請求項8〜10の何れか一項に記載のギヤドモータ。Has a second frame member
The second frame member is
It is fixed to the other end of the motor body in the axial direction.
Supporting the drive gear mechanism,
Supporting the other end of the intermediate gear mechanism in the axial direction,
Supports the other end of the output shaft in the axial direction.
The geared motor according to any one of claims 8 to 10.
請求項11に記載のギヤドモータ。The second frame member is welded and fixed to the motor body.
The geared motor according to claim 11.
請求項11又は12に記載のギヤドモータ。One of the first frame member and the second frame member has a beam portion extending to the other side along the axial direction and welded and fixed to the other side.
The geared motor according to claim 11 or 12.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019140036AJP7285723B2 (en) | 2019-07-30 | 2019-07-30 | gearbox and geared motor |
| CN202021536714.1UCN213270922U (en) | 2019-07-30 | 2020-07-29 | Gear device and geared motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019140036AJP7285723B2 (en) | 2019-07-30 | 2019-07-30 | gearbox and geared motor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021021468Atrue JP2021021468A (en) | 2021-02-18 |
| JP7285723B2 JP7285723B2 (en) | 2023-06-02 |
Family
ID=74574784
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019140036AActiveJP7285723B2 (en) | 2019-07-30 | 2019-07-30 | gearbox and geared motor |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7285723B2 (en) |
| CN (1) | CN213270922U (en) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57163046U (en)* | 1981-04-06 | 1982-10-14 | ||
| JPH08312756A (en)* | 1995-05-10 | 1996-11-26 | Volkswagen Ag <Vw> | Transmission gear with magnetic toothed plate |
| JPH10127011A (en)* | 1996-10-17 | 1998-05-15 | Canon Inc | Motor drive |
| JP2007159237A (en)* | 2005-12-02 | 2007-06-21 | Nidec Copal Corp | Geared stepping motor |
| JP2011179607A (en)* | 2010-03-02 | 2011-09-15 | Sanyo Electric Co Ltd | Geared motor |
| JP2013087909A (en)* | 2011-10-20 | 2013-05-13 | Tsubaki Emerson Co | Low-backlash gear mechanism and device |
| WO2017002464A1 (en)* | 2015-06-30 | 2017-01-05 | 並木精密宝石株式会社 | Clutch device and motor unit using said clutch device |
| JP2017196972A (en)* | 2016-04-26 | 2017-11-02 | 本田技研工業株式会社 | Motor power transmission device |
- 2019
- 2019-07-30JPJP2019140036Apatent/JP7285723B2/enactiveActive
- 2020
- 2020-07-29CNCN202021536714.1Upatent/CN213270922U/enactiveActive
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57163046U (en)* | 1981-04-06 | 1982-10-14 | ||
| JPH08312756A (en)* | 1995-05-10 | 1996-11-26 | Volkswagen Ag <Vw> | Transmission gear with magnetic toothed plate |
| JPH10127011A (en)* | 1996-10-17 | 1998-05-15 | Canon Inc | Motor drive |
| JP2007159237A (en)* | 2005-12-02 | 2007-06-21 | Nidec Copal Corp | Geared stepping motor |
| JP2011179607A (en)* | 2010-03-02 | 2011-09-15 | Sanyo Electric Co Ltd | Geared motor |
| JP2013087909A (en)* | 2011-10-20 | 2013-05-13 | Tsubaki Emerson Co | Low-backlash gear mechanism and device |
| WO2017002464A1 (en)* | 2015-06-30 | 2017-01-05 | 並木精密宝石株式会社 | Clutch device and motor unit using said clutch device |
| JP2017196972A (en)* | 2016-04-26 | 2017-11-02 | 本田技研工業株式会社 | Motor power transmission device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN213270922U (en) | 2021-05-25 |
| JP7285723B2 (en) | 2023-06-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101748177B1 (en) | Wave gear device with composite roller bearing | |
| TWI614427B (en) | Flexing meshing gear device | |
| WO2014203295A1 (en) | Bearing holder, bearing mechanism, and strain wave gearing device | |
| US6607461B2 (en) | Electrically driven actuator | |
| WO2005100818A1 (en) | Wave gear device | |
| WO2016025039A1 (en) | Harmonic drive apparatus | |
| JPWO2015037087A1 (en) | Wave generator and wave gear device | |
| JP7285738B2 (en) | geared motor | |
| JP6463212B2 (en) | Planetary roller drive type inscribed planetary gear reduction device | |
| JP2019044936A (en) | transmission | |
| JP6228588B2 (en) | Deceleration device and geared motor, electronic device and robot provided with the same | |
| JP2018189237A (en) | Cyclo reducer | |
| CN114127442A (en) | Speed reducer | |
| JP5480845B2 (en) | Planetary gear mechanism | |
| CN212935704U (en) | Gear drive motor | |
| JP7285723B2 (en) | gearbox and geared motor | |
| JP2017207193A (en) | Traction speed reducer and speed reducer with electric motor | |
| JP2016008633A (en) | Inscription gear type speed reducer | |
| CN107202100A (en) | Gear device | |
| EP2837849A1 (en) | Wave gear mechanism | |
| WO2018211997A1 (en) | Wave gear device | |
| JP7370279B2 (en) | planetary gear transmission | |
| CN213176710U (en) | Gear motor | |
| CN213270948U (en) | Gear motor | |
| JP6713363B2 (en) | transmission |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20220621 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20230316 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20230509 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20230523 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:7285723 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 |