JP2020197099A - Vehicle control system - Google Patents
Vehicle control systemDownload PDFInfo
- Publication number
- JP2020197099A JP2020197099AJP2019105242AJP2019105242AJP2020197099AJP 2020197099 AJP2020197099 AJP 2020197099AJP 2019105242 AJP2019105242 AJP 2019105242AJP 2019105242 AJP2019105242 AJP 2019105242AJP 2020197099 AJP2020197099 AJP 2020197099A
- Authority
- JP
- Japan
- Prior art keywords
- terminal device
- mobile terminal
- digital key
- range
- vehicle control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000004913activationEffects0.000claimsabstractdescription20
- 238000001514detection methodMethods0.000claimsabstractdescription8
- 238000005259measurementMethods0.000claimsdescription14
- 230000003213activating effectEffects0.000claimsdescription2
- 238000012545processingMethods0.000description46
- 238000000034methodMethods0.000description21
- 238000004891communicationMethods0.000description10
- 230000008569processEffects0.000description10
- 238000013459approachMethods0.000description5
- 230000005540biological transmissionEffects0.000description5
- 230000003111delayed effectEffects0.000description4
- 238000010586diagramMethods0.000description4
- 230000004044responseEffects0.000description4
- 230000008859changeEffects0.000description1
- 230000002708enhancing effectEffects0.000description1
- 239000004973liquid crystal related substanceSubstances0.000description1
- 230000007774longtermEffects0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 238000005728strengtheningMethods0.000description1
Images




Landscapes
- Selective Calling Equipment (AREA)
- Telephonic Communication Services (AREA)
- Lock And Its Accessories (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Description
Translated fromJapanese本発明は、車両ドアの開錠等に用いられる車両制御システムに関する。 The present invention relates to a vehicle control system used for unlocking a vehicle door or the like.
従来から、スマートフォンを電子キーとして用いて、車両ドアの開錠や施錠、エンジン始動等を行うようにした車載通信システムが知られている(例えば、特許文献1参照。)。この車載通信システムでは、車両の車載制御部とスマートフォンとの間でリンク要求信号、リンク応答信号、BT照合要求信号、BT照合応答信号などを送受信することにより、車両側でスマートフォンの位置に応じた車載機器の動作を許可するようになっている。 Conventionally, there has been known an in-vehicle communication system in which a smartphone is used as an electronic key to unlock and lock a vehicle door, start an engine, and the like (see, for example, Patent Document 1). In this in-vehicle communication system, a link request signal, a link response signal, a BT collation request signal, a BT collation response signal, etc. are transmitted and received between the in-vehicle control unit of the vehicle and the smartphone, so that the vehicle can respond to the position of the smartphone. It is designed to allow the operation of in-vehicle devices.
ところで、上述した特許文献1に開示された車載通信システムでは、電子キーとしてのスマートフォンに固定のIDコード等を保持しておいて認証を行っているが、盗難防止機能の強化の観点から、固定のIDコード等を用いる代わりに、ネットワークを介して接続されたサーバから定期的に変更されるデジタルキーを用いた認証方式が提案されている。例えば、 Car Connectivity Consortium(登録商標)が公開した新たな技術規格である「「Digital Key 1.0」では、利用者がサーバからデジタルキーをスマートフォンにダウンロードする方式が提示されている。 By the way, in the in-vehicle communication system disclosed in
しかし、このようなデジタルキーを用いる場合には、認証のために車両側でも同じデジタルキーをサーバからダウンロードする必要があり、そのための処理装置には複雑な処理が要求されることになり、この処理装置の消費電流が多くなる。このため、利用者が車両に近づいていって、利用者が所持するスマートフォンが車両側で検出されたときに、車両側でサーバからデジタルキーをダウンロードして認証に備えようとすると、車両側に備わった処理装置をダウンロードに先立って起動しておく必要があり、消費電力が過大になるという問題がある。特に、複雑な処理を行う処理装置は、複雑なプログラムを読み込んで実行する必要があるため、起動してから実際に動作を開始するまでに時間がかかるため(例えば数十秒)、利用者が車両に到達した際に確実に動作可能な状態とするためには、速く歩く利用者を考慮に入れて処理装置を早めに起動する必要がある。また、このような複雑な処理を行う処理装置は、消費電流も多いため(例えば数A)、起動後に消費される電力も多くなる。 However, when such a digital key is used, it is necessary to download the same digital key from the server on the vehicle side for authentication, and the processing device for that purpose requires complicated processing. The current consumption of the processing device increases. For this reason, when the user approaches the vehicle and the smartphone possessed by the user is detected on the vehicle side, when the vehicle side downloads the digital key from the server and tries to prepare for authentication, the vehicle side There is a problem that the power consumption becomes excessive because it is necessary to start the provided processing device before downloading. In particular, a processing device that performs complicated processing needs to read and execute a complicated program, and it takes time from the start to the actual start of operation (for example, several tens of seconds). In order to ensure that the vehicle can operate when it reaches the vehicle, it is necessary to start the processing device early in consideration of the user who walks fast. Further, since the processing device that performs such a complicated process consumes a large amount of current (for example, several A), the power consumed after the start-up also increases.
本発明は、このような点に鑑みて創作されたものであり、その目的は、デジタルキーをネットワークを介して取得して認証を行う場合であっても電力消費を抑えることができる車両制御システムを提供することにある。 The present invention has been created in view of these points, and an object of the present invention is a vehicle control system capable of suppressing power consumption even when a digital key is acquired via a network and authentication is performed. Is to provide.
上述した課題を解決するために、本発明の車両制御システムは、車両に搭載された車両制御装置とユーザが携帯する携帯端末装置のそれぞれにおいてネットワークを介して認証用のデジタルキーを取得し、これらのデジタルキーを用いて認証を行う車両制御システムであって、車両制御装置は、起動してから動作可能になるまで所定時間を要し、ネットワークを介してデジタルキーの取得を行うデジタルキー取得手段と、車両周辺の第1の範囲内に携帯端末装置が進入した後に、携帯端末装置までの距離と携帯端末装置の移動速度とを検出する端末検出手段と、車両周辺において第1の範囲よりも狭い第3の範囲であって、デジタルキー取得手段によるデジタルキーの取得動作の開始タイミングを示す第3の範囲に携帯端末装置が到達するまでの時間を、端末検出手段による検出結果に基づいて予測する到達時間予測手段と、第1の範囲と第3の範囲の間であって、デジタルキー取得手段の起動タイミングを示す第2の範囲を設定する起動範囲設定手段と、携帯端末装置が第2の範囲に到達したときにデジタルキー取得手段を起動する起動手段とを備えている。 In order to solve the above-mentioned problems, the vehicle control system of the present invention acquires a digital key for authentication via a network in each of the vehicle control device mounted on the vehicle and the mobile terminal device carried by the user, and these It is a vehicle control system that authenticates using the digital key of the above, and the vehicle control device takes a predetermined time from the start to the operation, and the digital key acquisition means for acquiring the digital key via the network. And, after the mobile terminal device enters the first range around the vehicle, the terminal detecting means for detecting the distance to the mobile terminal device and the moving speed of the mobile terminal device, and the terminal detecting means around the vehicle than the first range. The time until the mobile terminal device reaches the narrow third range, which indicates the start timing of the digital key acquisition operation by the digital key acquisition means, is predicted based on the detection result by the terminal detection means. The arrival time predicting means, the activation range setting means for setting the second range indicating the activation timing of the digital key acquisition means between the first range and the third range, and the mobile terminal device are the second. It is equipped with an activation means that activates the digital key acquisition means when the range of is reached.
一般に、ネットワークを介してデジタルキーを取得する処理は複雑であり、動作可能な状態を維持しようとすると、消費電力が多くなる。したがって、消費電力を抑制するためには、デジタルキー取得手段を起動するタイミングを遅くすることが望ましい。本発明では、デジタルキーを取得する動作を開始するタイミングに合わせて起動タイミングを遅らせることができるため、ネットワークを介してデジタルキーを取得して認証に用いる場合であっても電力消費を抑えることが可能となる。 In general, the process of acquiring a digital key via a network is complicated, and power consumption increases when trying to maintain an operable state. Therefore, in order to suppress power consumption, it is desirable to delay the timing of activating the digital key acquisition means. In the present invention, since the activation timing can be delayed according to the timing at which the operation of acquiring the digital key is started, power consumption can be suppressed even when the digital key is acquired via the network and used for authentication. It will be possible.
また、上述した到達時間予測手段によって予測される時間をT1、デジタルキー取得手段を起動してから動作可能になるまでの所要時間をT2としたときに、起動範囲設定手段は、時間T1から時間T2を差し引いた時間T3を算出し、この時間T3で携帯端末装置が到達する範囲を第2の範囲として設定することが望ましい。このように、デジタルキーを取得する動作を開始するタイミングに間に合うような起動タイミングを示す第2の範囲を設定することにより、実際にデジタルキーを取得したいタイミングで取得動作の待機を強いられる事態を避けることができる。 Further, when the time predicted by the arrival time predicting means described above is T1 and the time required from the activation of the digital key acquisition means to the operation becomes T2, the activation range setting means is the time from the time T1. It is desirable to calculate the time T3 obtained by subtracting T2 and set the range reached by the mobile terminal device as the second range at this time T3. In this way, by setting the second range indicating the activation timing that is in time for the timing to start the operation of acquiring the digital key, the situation where the user is forced to wait for the acquisition operation at the timing when he / she actually wants to acquire the digital key. Can be avoided.
また、上述した車両制御装置と携帯端末装置との間はBLE(Bluetooth Low Energy)リンクを介して接続可能であり、第1の範囲は、BLEリンクが確立された範囲であることが望ましい。一般に、BLEリンクが確立可能な距離は間に何もない場合に100m以上と長いため、携帯端末装置が第1の範囲内に進入した後に、その携帯端末装置までの距離と、携帯端末装置の移動速度とを検出するための十分な時間を確保することができ、第3の範囲に携帯端末装置が到達するまでの時間を精度よく予測することが可能となる。 Further, the vehicle control device and the mobile terminal device described above can be connected via a BLE (Bluetooth Low Energy) link, and the first range is preferably a range in which the BLE link is established. In general, the distance at which a BLE link can be established is as long as 100 m or more when there is nothing in between. Therefore, after the mobile terminal device enters the first range, the distance to the mobile terminal device and the distance of the mobile terminal device It is possible to secure a sufficient time for detecting the moving speed, and it is possible to accurately predict the time until the mobile terminal device reaches the third range.
また、上述した端末検出手段は、携帯端末装置から送信されてアンテナで受信した信号に基づくToF(Time of Flight)測距を行うことにより、携帯端末装置までの距離と携帯端末装置の移動速度とを検出することが望ましい。 Further, the terminal detection means described above performs ToF (Time of Flight) distance measurement based on a signal transmitted from the mobile terminal device and received by the antenna to obtain the distance to the mobile terminal device and the moving speed of the mobile terminal device. Is desirable to detect.
ToF測距を用いることにより、従来から用いられているRSSI(Receive Signal Strength Indicator)などによる測距よりも高い精度で携帯端末装置までの距離や移動速度を検出することが可能となる。 By using ToF distance measurement, it is possible to detect the distance to the mobile terminal device and the moving speed with higher accuracy than the distance measurement by RSSI (Receive Signal Strength Indicator) which has been conventionally used.
以下、本発明を適用した一実施形態の車両制御システムについて、図面を参照しながら説明する。 Hereinafter, a vehicle control system according to an embodiment to which the present invention is applied will be described with reference to the drawings.
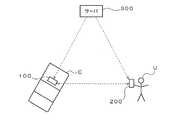
図1は、一実施形態の車両制御システムの概要を示す図である。図1に示す本実施形態の車両制御システムでは、従来の電子キーとしてのキーフォブ(Key Fob)の代わりにユーザUが携帯する携帯端末装置200が用いられる。また、キーフォブを用いる従来構成では、キーフォブと車両Cの双方に固定の鍵コードを保持しておいて認証を行っていたが、本実施形態では、この固定キーの代わりに、サーバ300から携帯端末装置200と車両制御装置100のそれぞれにおいてネットワークを介してダウンロードするデジタルキーが認証用に用いられる。このデジタルキーは、所定周期で内容が変更される。 FIG. 1 is a diagram showing an outline of a vehicle control system of one embodiment. In the vehicle control system of the present embodiment shown in FIG. 1, a
ところで、このデジタルキーは、セキュリティ強化の観点から、送信の際にはスクランブル処理等が行われた複雑なデータ列を含む信号が用いられるため、車両制御装置100においてこの複雑なデータ列を受信してデジタルキーを取得するために、処理能力が高いアプリケーションプロセッサが用いられる。このアプリケーションプロセッサは、処理能力が高い分、消費電力が多いため、起動タイミングをできるだけ遅くして動作時間を短くする工夫が必要となる。 By the way, from the viewpoint of enhancing security, this digital key uses a signal including a complicated data string that has been scrambled or the like at the time of transmission. Therefore, the
図2は、ユーザUが車両Cに接近して乗り込むまでの車両制御装置100の動作の概要を示す図である。車両Cの周辺には、S1〜S4で示される4種類のエリアが設定されている。 FIG. 2 is a diagram showing an outline of the operation of the
エリアS1:BLEリンク可能範囲
本実施形態では、車載制御装置100と携帯端末装置200との間の接続はBLE(Bluetooth Low Energy)リンクを介して行われる。携帯端末装置200が車両Cに近づいて行ってBLEリンクが確立される範囲をエリアS1とする。Area S1: BLE linkable range In the present embodiment, the connection between the vehicle-mounted
エリアS2:デジタルキー認証準備範囲
携帯端末装置200が車両Cに近づいて行ったときに、車両制御装置100では、認証に用いられるデジタルキーをサーバ300からダウンロードして取得する必要がある。このデジタルキーの取得動作を行うために、処理能力が高いアプリケーションプロセッサAPを起動する必要があり、この起動を実行するトリガとなる範囲をエリアS2とする。すなわち、エリアS2の外部から内部に携帯端末装置200の位置が移動したときに、アプリケーションプロセッサが起動される。本実施形態では、このエリアS2の設定方法に特徴があり、その詳細については後述する。Area S2: Digital key authentication preparation range When the
エリアS3:キーレス操作可能範囲
従来のキーフォブを用いて車両ドアの開錠などのキーレス操作が可能な範囲をエリアS3とする。本実施形態では、このキーフォブの代わりに携帯端末装置200が用いられるため、携帯端末装置200を用いて同様のキーレス操作を行うことができる。このキーレス操作の許可には、デジタルキーを用いた認証が必要であり、上述したエリアS2内に携帯端末装置200の位置が移動した際に起動されたアプリケーションプロセッサによるデジタルキーの取得は、このエリアS3内に携帯端末装置200の位置が移動した時点で終了している必要がある。Area S3: Keyless operation range Area S3 is the range in which keyless operation such as unlocking the vehicle door using a conventional key fob is possible. In the present embodiment, since the
エリアS4:RKE動作可能範囲
車両のドアスイッチを操作することによりドアの開錠/施錠動作やエンジンスタート動作などのRKE(Remote Keyless Entry)動作が可能な範囲をエリアS4とする。このRKE動作の許可には、アプリケーションプロセッサによって取得されたデジタルキーが必要となる。Area S4: RKE operable range Area S4 is the range in which RKE (Remote Keyless Entry) operations such as door unlocking / locking operation and engine start operation can be performed by operating the door switch of the vehicle. A digital key obtained by the application processor is required to permit this RKE operation.
図3は、携帯端末装置200の構成を示す図である。図3に示す携帯端末装置200は、一般にスマートフォンと称されるものであり、携帯電話機と携帯情報端末の機能を有する。この携帯端末装置200は、操作部210、タッチパネル212、入力制御部214、表示処理部220、表示部222、制御部230、LTE(Long Term Evolution)処理部240、BLE処理部250を備えている。 FIG. 3 is a diagram showing the configuration of the
操作部210は、ユーザUによる各種操作を受け付けるためのものであり、各種のスイッチや操作つまみ等が備わっている。タッチパネル212は、表示部222の画面に重ねて配置されており、ユーザUの指が接触した画面上の位置を検出する。入力制御部214は、操作部210およびタッチパネル212の操作状態を監視し、ユーザUによる入力内容を検出する。 The
表示処理部220は、各種の操作画面や入力画面等を表示する映像信号を出力して表示部222にこれらの画面を表示する。表示部222は、LCD(液晶表示装置)等で構成されており、操作部210やタッチパネル212を用いた操作内容や制御部230による処理内容などが表示される。 The
制御部230は、携帯端末装置200の全体を制御するためのものであり、ROMやRAMなどに格納された所定のプログラムをCPUで実行することにより実現される。 The
LTE処理部240は、LTE方式で公衆電話回線を介した通信の処理を行う。例えば、LTE処理部240は、基地局との間で発着信処理を行って通話処理やインターネット接続処理等を行う。このLTE処理部240による通信によってサーバ300からのデジタルキーのダウンロードが行われる。なお、この公衆電話回線を介した通信は、LTE方式以外の方式(4Gや5Gなど)を用いるようにしてもよい。BLE処理部250は、Bluetooth(登録商標)規格の一つであるBLEを用いたリンクを介した通信の処理を行う。 The
本実施形態では、この携帯端末装置200を従来のキーフォブの代わりに用いており、そのために、LTE処理部240を用いてサーバ300からデジタルキーをダウンロードして取得するとともに、BLE処理部250を用いて車両制御装置200との間で確立されたBLEリンクを介してデジタルキーを送信する処理が行われる。これらの動作を行うために、制御部230は、デジタルキー取得部232とデジタルキー送信部234を備えている。上述したサーバ300からのデジタルキーの取得動作がデジタルキー取得部232で行われ、上述した車両制御装置100へのデジタルキーの送信動作がデジタルキー送信部234によって行われる。 In the present embodiment, the mobile
図4は、車両制御装置100の構成を示す図である。7つのBLE処理部LF、RF、LR、RR、IF、IR、K、LTE処理部110、左ドアECU120、右ドアECU122、バックドアECU124、ボディECU126、エンジンECU128、制御部130を備えている。 FIG. 4 is a diagram showing the configuration of the
BLE処理部LF、RF、LR、RR、IF、IRは、RKE動作に対応してユーザU(携帯端末装置200)の位置を正確に検出するAoA(Angle of Arrival)測距用であり、BLEを用いた通信を行う。具体的には、BLE処理部LFのアンテナが車両Cの左側前方部分に設けられている。BLE処理部RFのアンテナが車両Cの右側前方部分に設けられている。BLE処理部LRのアンテナが車両Cの左側後方部分に設けられている。BLE処理部RRのアンテナが車両Cの右側後方部分に設けられている。BLE処理部IFのアンテナが車両Cの車室内前方部分に設けられている。BLE処理部IRのアンテナが車両Cの車室内後方部分に設けられている。 The BLE processing units LF, RF, LR, RR, IF, and IR are for AoA (Angle of Arrival) distance measurement that accurately detects the position of the user U (portable terminal device 200) in response to the RKE operation, and are for BLE. Communicate using. Specifically, the antenna of the BLE processing unit LF is provided on the left front portion of the vehicle C. The antenna of the BLE processing unit RF is provided on the right front part of the vehicle C. The antenna of the BLE processing unit LR is provided on the left rear portion of the vehicle C. The antenna of the BLE processing unit RR is provided on the right rear portion of the vehicle C. The antenna of the BLE processing unit IF is provided in the front portion of the vehicle interior of the vehicle C. The antenna of the BLE processing unit IR is provided in the rear portion of the vehicle interior of the vehicle C.
BLE処理部Kは、携帯端末装置200との間でBLEを用いたリンクを介した通信を行う。 The BLE processing unit K communicates with the mobile
LTE処理部110は、LTE方式で公衆電話回線を介した通信の処理を行う。このLTE処理部110による通信によってサーバ300からのデジタルキーのダウンロードが行われる。なお、この公衆電話回線を介した通信は、LTE方式以外の方式(4Gや5Gなど)を用いるようにしてもよい。 The
左ドアECU120、右ドアECU122、バックドアECU124、ボディECU126、エンジンECU128は、RKE動作を含む各種制御を行う。例えば、左ドアECU120は、RKE動作が許可された状態で、ユーザUによって左ドアスイッチ(図示せず)が操作されたときに左ドアを開錠あるいは施錠する制御を行う。右ドアECU122は、RKE動作が許可された状態で、ユーザUによって右ドアスイッチ(図示せず)が操作されたときに右ドアを開錠あるいは施錠する制御を行う。バックドアECU124は、RKE動作が許可された状態で、ユーザUによってバックドアスイッチ(図示せず)が操作されたときにバックドアを開錠あるいは施錠する制御を行う。ボディECU126は、RKE動作が許可された状態で、ユーザUによってエアコン操作や室内灯操作などが行われたときにこれらの操作に対応する制御を行う。エンジンECU128は、RKE動作が許可された状態で、エンジンスタート操作などが行われるとエンジンを始動する制御などを行う。 The left door ECU 120, the right door ECU 122, the back door ECU 124, the body ECU 126, and the engine ECU 128 perform various controls including RKE operation. For example, the left door ECU 120 controls to unlock or lock the left door when the left door switch (not shown) is operated by the user U in a state where the RKE operation is permitted. The right door ECU 122 controls to unlock or lock the right door when the right door switch (not shown) is operated by the user U in a state where the RKE operation is permitted. The back door ECU 124 controls to unlock or lock the back door when the back door switch (not shown) is operated by the user U in a state where the RKE operation is permitted. The body ECU 126 performs control corresponding to these operations when the user U performs an air conditioner operation, an interior light operation, or the like in a state where the RKE operation is permitted. The engine ECU 128 controls to start the engine when an engine start operation or the like is performed in a state where the RKE operation is permitted.
制御部130は、ユーザUの携帯端末装置200がエリアS1内に進入してからキーレス操作の許可やRKE動作の許可に関する各種の処理を行うためのものであり、ROMやRAMなどに格納された所定のプログラムをMCU(マイクロコントロールユニット)やAP(アプリケーションプロセッサ)で実行することにより実現される。このために、制御部130は、デジタルキー取得部132、ToF(Time of Flight)測距部134、AP制御部136、端末デジタルキー取得部138、デジタルキー認証部140、キーレス操作許可部142、AoA測距部144、RKE動作許可部146を含んでいる。 The
デジタルキー取得部132は、LTE処理部110を用いてサーバ300からデジタルキーをダウンロードして取得する。このデジタルキーのダウンロード等には複雑な処理が必要であり、APによって行われる。 The digital
なお、本実施形態では、デジタルキー取得部132とデジタルキー認証部140の各動作が所定のプログラムをAPで実行することにより行われ、それ以外のToF測距部134、AP制御部136、端末デジタルキー取得部138、キーレス操作許可部142、AoA測距部144、RKE動作許可部146の各処理が個別のプログラムをMCUで実行することにより行われるものとする。 In this embodiment, each operation of the digital
ToF測距部134は、携帯端末装置200から送信されてBLE処理部Kのアンテナで受信した信号に基づくToF測距を行って、このアンテナから携帯端末装置200までの距離や携帯端末装置200の移動速度を検出する。 The
AP制御部136は、ToF測距部134によって検出された携帯端末装置200までの距離や移動速度に基づいて、デジタルキー取得部132などの動作を行うAPを起動する範囲(図2に示すエリアS2)を設定するとともに、携帯端末装置200がエリアS2内に進入したタイミングでAPを起動する。例えば、AP制御部136は、ToF測距部134によって検出された携帯端末装置200までの距離や移動速度に基づいて、携帯端末装置200がエリアS3に進入するまでの時間T1を予測し、この時間T1からAPの起動に要する時間T2を差し引いた時間T3(=T1−T2)を算出し、この時間T3で到達する範囲をエリアS2として設定する。 The
端末デジタルキー取得部138は、BLE処理部Kによって携帯端末装置200との間で確立されたBLEリンクを介して、携帯端末装置200のデジタルキー送信部234から送信されたデジタルキーを取得する。 The terminal digital key acquisition unit 138 acquires the digital key transmitted from the digital key transmission unit 234 of the mobile
デジタルキー認証部140は、デジタルキー取得部132によってサーバ300から取得したデジタルキーと、端末デジタルキー取得部138によって取得したデジタルキーを用いて、デジタルキーの認証を行う。 The digital
キーレス操作許可部142は、携帯端末装置200がエリアS3内に進入し(ToF測距部134の検出結果に基づいて判定)、デジタルキー認証部140による認証が成功したときに、携帯端末装置200を用いたキーレス操作に対して許可を与える。以後、各種のキーレス操作に対応してドアの開錠や施錠などが可能になる。 The keyless
AoA測距部144は、携帯端末装置200から送信されてBLE処理部LF、RF、LR、RR、IF、IRのそれぞれのアンテナで受信した信号に基づくAoA測距を行って、携帯端末装置200の位置を検出する。 The
RKE動作許可部146は、携帯端末装置200がエリアS4内に進入し(AoA測距部144の検出結果に基づいて判定)、デジタルキー認証部140による認証が成功したときに、RKE動作に対して許可を与える。以後、ドアの開錠や施錠、エンジン始動などの各種RKE動作が可能になる。 When the mobile
上述したデジタルキー取得部132がデジタルキー取得手段に、ToF測距部134が端末検出手段に、AP制御部136が到達時間予測手段、起動範囲設定手段、起動手段にそれぞれ対応する。また、上述したエリアS1が第1の範囲に、エリアS2が第2の範囲に、エリアS3が第3のエリアにそれぞれ対応する。 The digital
本実施形態の車両制御システムはこのような構成を有しており、次に、デジタルキー認証準備範囲としてのエリアS2を設定する動作について説明する。 The vehicle control system of the present embodiment has such a configuration, and next, an operation of setting the area S2 as the digital key authentication preparation range will be described.
図5は、携帯端末装置200がエリアS1内に進入した後にデジタルキー認証準備範囲(エリアS2)を設定する動作手順を示す流れ図である。 FIG. 5 is a flow chart showing an operation procedure for setting a digital key authentication preparation range (area S2) after the mobile
BLE処理部Kは、携帯端末装置200との間でBLEリンクが確立されたか否かを判定している(ステップ100、例えば内蔵されたMCUによってこの判定が行われる)。携帯端末装置200がエリアS1の外側に位置する場合にはBLEリンクが確立されず、否定判断が行われてこの判定が繰り返される。 The BLE processing unit K determines whether or not a BLE link has been established with the mobile terminal device 200 (this determination is performed by
また、携帯端末装置200がエリアS1内に進入してBLEリンクが確立されると、ステップ100の判定において肯定判断が行われる。次に、BLE処理部Kは、ToF測距部134用のMCUと、AP制御部136用のMCUを起動する(ステップ102)。以後、エリアS1内におけるToF測距部134による測距動作が行われる。 Further, when the mobile
次に、AP制御部136は、ToF測距部134によって検出された携帯端末装置200までの距離や移動速度(この移動速度は、例えば距離の変化に基づいて算出される)に基づいて、携帯端末装置200がエリアS3に進入するまでの時間T1を算出し(ステップ104)、この時間T1からAPの起動に要する時間T2を差し引いた時間T3(=T1−T2)を算出して、この時間T3で到達する範囲をエリアS2として設定する(ステップ106)。 Next, the
次に、AP制御部136は、設定したエリアS2に携帯端末装置200が到達したか否かを判定する(ステップ108)。到達しない場合には否定判断が行われ、この判定が繰り返される。なお、携帯端末装置200がエリアS2に到達するまでにエリアS1の外側に移動した場合にはBLEリンクが解除され、ToF測距部134用のMCUと、AP制御部136用のMCUが動作を停止させる。 Next, the
また、携帯端末装置200がエリアS2に到達した場合にはステップ108の判定において肯定判断が行われる。次に、AP制御部136は、APを起動する(ステップ110)。次に、AP制御部136は、携帯端末装置200がエリアS2から離脱(外側に移動)したか否かを判定する(ステップ112)。エリアS2から離脱した場合には肯定判断が行われる。この場合には、AP制御部136は、一旦起動したAPを停止させる(ステップ114)。その後、ステップ104に戻って、携帯端末装置200がエリアS3に進入するまでの時間T1の算出動作以降が繰り返される。 Further, when the mobile
また、エリアS2から離脱しない場合にはステップ112の判定において否定判断が行われる。次に、キーレス操作許可部142は、携帯端末装置200がエリアS3に到達したか否かを判定する(ステップ116)。到達しない場合には否定判断が行われ、ステップ112に戻ってエリアS2の離脱判定が繰り返される。また、携帯端末装置200がエリアS3に到達するとステップ116の判定において肯定判断が行われる。その後、携帯端末装置200の位置に応じて、キーレス操作許可部142やRKE動作許可部146による動作が行われる。 Further, if the area S2 is not removed, a negative determination is made in the determination in step 112. Next, the keyless
このように、本実施形態の車両制御装置100では、デジタルキーを取得する動作を開始するタイミングに合わせて、デジタルキー取得部132を実現するAPの起動タイミングを遅らせることができるため、ネットワークを介してデジタルキーを取得して認証に用いる場合であっても、APによる電力消費を抑えることが可能となる。 As described above, in the
特に、デジタルキーを取得する動作を開始するタイミング(エリアS3に到達するタイミング)に間に合うように起動タイミングを示すエリアS2を設定することにより、実際にデジタルキーを取得したいタイミングで取得動作の待機を強いられる事態を避けることができる。 In particular, by setting the area S2 that indicates the activation timing in time for the timing to start the operation of acquiring the digital key (the timing of reaching the area S3), the standby of the acquisition operation can be waited at the timing when the digital key is actually acquired. You can avoid being forced.
また、車両制御装置100と携帯端末装置200との間はBLEリンクを介して接続可能であり、エリアS1をBLEリンクが確立された範囲としている。これにより、エリアS1内に進入後に、車両制御装置100から携帯端末装置200までの距離と、携帯端末装置200の移動速度とを検出するための十分な時間を確保することができ、エリアS3に携帯端末装置200が到達するまでの時間を精度よく予測することが可能となる。 Further, the
また、ToF測距を用いることにより、従来から用いられているRSSIなどによる測距よりも高い精度で携帯端末装置までの距離や移動速度を検出することが可能となる。 Further, by using ToF distance measurement, it is possible to detect the distance to the mobile terminal device and the moving speed with higher accuracy than the distance measurement by RSSI or the like which has been conventionally used.
なお、本発明は上記実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形実施が可能である。例えば、上述した実施形態では、車両制御装置100と携帯端末装置200との間の距離をToF測距によって検出するようにしたが、AoA等の他の方法で検出したり、他の方法を併用するようにしてもよい。また、従来から一般に用いられているRSSIによる測距を用いるようにしてもよい。 The present invention is not limited to the above embodiment, and various modifications can be made within the scope of the gist of the present invention. For example, in the above-described embodiment, the distance between the
上述したように、本発明によれば、デジタルキーを取得する動作を開始するタイミングに合わせてデジタルキー取得手段の起動タイミングを遅らせることができるため、ネットワークを介してデジタルキーを取得して認証に用いる場合であっても電力消費を抑えることが可能となる。 As described above, according to the present invention, since the activation timing of the digital key acquisition means can be delayed according to the timing of starting the operation of acquiring the digital key, the digital key is acquired via the network for authentication. Even when it is used, it is possible to suppress power consumption.
100 車両制御装置
110 LTE処理部
130 制御部
132 デジタルキー取得部
134 ToF測距部
136 AP制御部
138 端末デジタルキー取得部
140 デジタルキー認証部
142 キーレス操作許可部
144 AoA測距部
146 RKE動作許可部
200 携帯端末装置
300 サーバ
LF、RF、LR、RR、IF、IR、K BLE処理部100
Claims (4)
Translated fromJapanese前記車両制御装置は、
起動してから動作可能になるまで所定時間を要し、前記ネットワークを介して前記デジタルキーの取得を行うデジタルキー取得手段と、
車両周辺の第1の範囲内に前記携帯端末装置が進入した後に、前記携帯端末装置までの距離と前記携帯端末装置の移動速度とを検出する端末検出手段と、
車両周辺において前記第1の範囲よりも狭い第3の範囲であって、前記デジタルキー取得手段による前記デジタルキーの取得動作の開始タイミングを示す第3の範囲に前記携帯端末装置が到達するまでの時間を、前記端末検出手段による検出結果に基づいて予測する到達時間予測手段と、
前記第1の範囲と前記第3の範囲の間であって、前記デジタルキー取得手段の起動タイミングを示す第2の範囲を設定する起動範囲設定手段と、
前記携帯端末装置が前記第2の範囲に到達したときに前記デジタルキー取得手段を起動する起動手段と、
を備えることを特徴とする車両制御システム。A vehicle control system in which a vehicle control device mounted on a vehicle and a mobile terminal device carried by a user each acquire a digital key for authentication via a network and perform authentication using these digital keys.
The vehicle control device
A digital key acquisition means for acquiring the digital key via the network, which takes a predetermined time from the start to the operation.
A terminal detecting means for detecting the distance to the mobile terminal device and the moving speed of the mobile terminal device after the mobile terminal device has entered the first range around the vehicle.
Until the mobile terminal device reaches a third range around the vehicle, which is narrower than the first range and indicates the start timing of the digital key acquisition operation by the digital key acquisition means. An arrival time predicting means that predicts the time based on the detection result by the terminal detecting means, and
An activation range setting means for setting a second range between the first range and the third range, which indicates the activation timing of the digital key acquisition means, and
An activation means for activating the digital key acquisition means when the mobile terminal device reaches the second range, and an activation means.
A vehicle control system characterized by being equipped with.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019105242AJP7210382B2 (en) | 2019-06-05 | 2019-06-05 | vehicle control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019105242AJP7210382B2 (en) | 2019-06-05 | 2019-06-05 | vehicle control system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020197099Atrue JP2020197099A (en) | 2020-12-10 |
| JP7210382B2 JP7210382B2 (en) | 2023-01-23 |
Family
ID=73647888
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019105242AActiveJP7210382B2 (en) | 2019-06-05 | 2019-06-05 | vehicle control system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7210382B2 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022208957A1 (en)* | 2021-03-29 | 2022-10-06 | パナソニックIpマネジメント株式会社 | Vehicle control system and control method |
| CN116614776A (en)* | 2022-12-29 | 2023-08-18 | 摩斯智联科技有限公司 | A Driver Recognition System |
| JP2024001797A (en)* | 2022-06-22 | 2024-01-10 | トヨタ自動車株式会社 | Management device, management method, and management program |
| JP7754000B2 (en) | 2022-06-22 | 2025-10-15 | トヨタ自動車株式会社 | Management device, management method, and management program |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010202043A (en)* | 2009-03-03 | 2010-09-16 | Denso Corp | Power consumption reducing device for vehicle |
| JP2011201443A (en)* | 2010-03-26 | 2011-10-13 | Pioneer Electronic Corp | Start-up timing determination system and start-up timing determining method |
| JP2015006852A (en)* | 2013-06-25 | 2015-01-15 | 株式会社デンソー | Vehicle communication device |
| JP2016208494A (en)* | 2016-02-01 | 2016-12-08 | 株式会社 ディー・エヌ・エー | System and method for managing vehicle |
| US20170178035A1 (en)* | 2015-12-22 | 2017-06-22 | GM Global Technology Operations LLC | Ride sharing accessory device and system |
| WO2018166907A1 (en)* | 2017-03-16 | 2018-09-20 | Robert Bosch Gmbh | Intelligent wireless access system and method for a vehicle |
| JP2018145766A (en)* | 2017-03-09 | 2018-09-20 | トヨタ自動車株式会社 | Locking/unlocking system, key unit, and server |
- 2019
- 2019-06-05JPJP2019105242Apatent/JP7210382B2/enactiveActive
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010202043A (en)* | 2009-03-03 | 2010-09-16 | Denso Corp | Power consumption reducing device for vehicle |
| JP2011201443A (en)* | 2010-03-26 | 2011-10-13 | Pioneer Electronic Corp | Start-up timing determination system and start-up timing determining method |
| JP2015006852A (en)* | 2013-06-25 | 2015-01-15 | 株式会社デンソー | Vehicle communication device |
| US20170178035A1 (en)* | 2015-12-22 | 2017-06-22 | GM Global Technology Operations LLC | Ride sharing accessory device and system |
| JP2016208494A (en)* | 2016-02-01 | 2016-12-08 | 株式会社 ディー・エヌ・エー | System and method for managing vehicle |
| JP2018145766A (en)* | 2017-03-09 | 2018-09-20 | トヨタ自動車株式会社 | Locking/unlocking system, key unit, and server |
| WO2018166907A1 (en)* | 2017-03-16 | 2018-09-20 | Robert Bosch Gmbh | Intelligent wireless access system and method for a vehicle |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022208957A1 (en)* | 2021-03-29 | 2022-10-06 | パナソニックIpマネジメント株式会社 | Vehicle control system and control method |
| JP2022152720A (en)* | 2021-03-29 | 2022-10-12 | パナソニックIpマネジメント株式会社 | Vehicle control system and control method |
| JP2024001797A (en)* | 2022-06-22 | 2024-01-10 | トヨタ自動車株式会社 | Management device, management method, and management program |
| JP7754000B2 (en) | 2022-06-22 | 2025-10-15 | トヨタ自動車株式会社 | Management device, management method, and management program |
| CN116614776A (en)* | 2022-12-29 | 2023-08-18 | 摩斯智联科技有限公司 | A Driver Recognition System |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7210382B2 (en) | 2023-01-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10493953B2 (en) | Car sharing system | |
| US10586414B2 (en) | User identification system | |
| US10984616B2 (en) | Car sharing system and car sharing program | |
| WO2015174012A1 (en) | Electronic key system | |
| US20170232933A1 (en) | Vehicle control system | |
| US10706650B2 (en) | Key unit, control system, control method, and non-transitory computer-readable storage medium having program stored therein | |
| KR20180067605A (en) | On-board device and authentication system | |
| US20180361991A1 (en) | Vehicle control system | |
| JP2016155526A (en) | Vehicle anti-theft device | |
| US11958562B2 (en) | Open-cabin vehicle and portable terminal | |
| JP2010165067A (en) | Vehicle mounted electronic key system, vehicle, and electronic key | |
| JP5152010B2 (en) | Electronic key system and portable device for vehicle control | |
| JP2019041348A (en) | Relay attack detector and relay attack detection method | |
| JP6536787B2 (en) | Vehicle control system | |
| CN111163977A (en) | Access system and access verification method | |
| JP7210382B2 (en) | vehicle control system | |
| CN115883720B (en) | Information processing device, vehicle, terminal, information processing method, and recording medium | |
| EP3640880A1 (en) | Vehicular control system | |
| JP2016017279A (en) | Electronic key system | |
| JP2023009917A (en) | Key storage unit and sharing system | |
| JP6414526B2 (en) | Remote control system | |
| CN118748801A (en) | Control method, device, equipment and storage medium based on vehicle key detection and measurement | |
| JP2018021422A (en) | Electronic key system and electronic key | |
| WO2016059773A1 (en) | Vehicle control system | |
| JP2006037410A (en) | Remote control system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20220329 | |
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20221228 | |
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20230110 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20230111 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:7210382 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 |