JP2018151388A - Traffic estimation device and program - Google Patents
Traffic estimation device and programDownload PDFInfo
- Publication number
- JP2018151388A JP2018151388AJP2018044723AJP2018044723AJP2018151388AJP 2018151388 AJP2018151388 AJP 2018151388AJP 2018044723 AJP2018044723 AJP 2018044723AJP 2018044723 AJP2018044723 AJP 2018044723AJP 2018151388 AJP2018151388 AJP 2018151388A
- Authority
- JP
- Japan
- Prior art keywords
- information
- trafficability
- relative reflectance
- soil
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Landscapes
- Investigation Of Foundation Soil And Reinforcement Of Foundation Soil By Compacting Or Drainage (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
Abstract
Translated fromJapaneseDescription
Translated fromJapanese本発明は、作業機械の走行に耐え得る地面の能力であるトラフィカビリティを推定するトラフィカビリティ推定装置およびプログラムに関する。 The present invention relates to a trafficability estimation apparatus and program for estimating trafficability, which is the ability of the ground that can withstand traveling of a work machine.
災害復旧工事や土木工事においては、事前に土地のトラフィカビリティを、例えばコーン貫入試験装置を用いて実測しておき、作業機械(重機)が土地の地面上を走行できるか否かを判定している。 In disaster recovery work and civil engineering work, the land trafficability is measured in advance using, for example, a cone penetration test device, and it is determined whether the work machine (heavy equipment) can run on the ground of the land. Yes.
しかしながら、上記従来技術では、例えば、災害復旧現場などのように、土地にぬかるみがあったり、土地の地盤が不安定であったりしてトラフィカビリティを実測する作業が困難、あるいは、危険となるような場合に、土地のトラフィカビリティを評価することが難しい。
本発明は、このような事情に鑑みてなされたものであり土地のトラフィカビリティ情報を安全に確実に推定する上で有利なトラフィカビリティ推定装置およびプログラムを提供することを目的とする。However, with the above-described conventional technology, for example, it may be difficult or dangerous to measure trafficability because the land is muddy or the ground of the land is unstable, such as at a disaster recovery site. In this case, it is difficult to evaluate the trafficability of the land.
The present invention has been made in view of such circumstances, and an object of the present invention is to provide a trafficability estimation apparatus and program that are advantageous in safely and reliably estimating land trafficability information.
本発明は、対象となる土地の地面の相対反射率の多次元分布である相対反射率情報を取得する情報取得部と、前記相対反射率情報に基いて土の種類および含水量を特定し、その特定結果に基いて前記地面のトラフィカビリティ情報を推定する推定部とを備えることを特徴とする。
また、本発明は、情報処理装置において実行されるプログラムであって、前記情報処理装置を、対象となる土地の地面の相対反射率の多次元分布である相対反射率情報を取得する情報取得部と、前記相対反射率情報に基いて土の種類および含水量を特定し、その特定結果に基いて前記地面のトラフィカビリティ情報を推定する推定部として機能させるためのプログラムである。The present invention specifies an information acquisition unit that acquires relative reflectance information, which is a multi-dimensional distribution of relative reflectance of the ground of the target land, and specifies the type of soil and water content based on the relative reflectance information, And an estimation unit that estimates the ground trafficability information based on the identification result.
The present invention is also a program executed in an information processing apparatus, wherein the information acquisition unit acquires relative reflectance information that is a multi-dimensional distribution of relative reflectance of the ground of a target land. And a soil type and water content based on the relative reflectance information, and a program for functioning as an estimation unit for estimating the ground trafficability information based on the identification result.
本発明によれば、対象となる土地の地面の相対反射率情報に基いて土の種類および含水量を特定し、その特定結果に基いてトラフィカビリティ情報を推定するようにした。
したがって、対象となる土地の地面にコーン貫入試験装置を運び込んで実測する必要がないため、実測する作業が困難、あるいは、危険となるような土地であっても、土地のトラフィカビリティ情報を安全に確実に推定する上で有利となる。According to the present invention, the soil type and water content are identified based on the relative reflectance information of the ground of the target land, and the trafficability information is estimated based on the identification result.
Therefore, since it is not necessary to carry a cone penetration test device to the ground of the target land and perform the actual measurement, even if it is difficult or dangerous, the traffic information of the land can be safely stored. This is advantageous for reliable estimation.
以下、本発明の実施の形態を図面に基づいて説明する。
図1は本実施の形態に係るトラフィカビリティ推定装置10の構成を示すブロック図である。
本実施の形態では、トラフィカビリティ推定装置10は、パーソナルコンピュータで構成されている。
なお、トラフィカビリティ推定装置10は、パーソナルコンピュータに限定されるものではなく、タブレット型端末など従来公知の様々なコンピュータを用いることができる。Hereinafter, embodiments of the present invention will be described with reference to the drawings.
FIG. 1 is a block diagram showing a configuration of a
In the present embodiment, the
Note that the
トラフィカビリティ推定装置10は、CPU12と、バスラインを介して接続されたROM14、RAM16、ハードディスク装置18、表示部20、入力部22、インターフェース24、通信部26、カードスロット28、プリンタ30などを含んで構成されている。
ROM14は、各種のデータを格納・記憶するものである。
RAM16はCPU12のワーキングエリアを提供するものである。
ハードディスク装置18は、CPU12が実行する本発明に係るプログラムを格納するものである。
また、ハードディスク装置18は、図2に示す学習モデル32を構成しており、学習モデル32については後述する。The
The
The
The
The
表示部20は、文字や画像を表示するものであり、本実施の形態では、トラフィカビリティ推定装置10によって推定されたトラフィカビリティにまつわる情報を表示出力するものである。
入力部22は、入力操作を受け付けるものであり、キーボードおよびマウスによって構成されている。なお、入力部22は、表示部20の表示面上に設けられたタッチパネルで構成してもよく、入力部22として従来公知の様々な構成の入力デバイスが使用可能である。The
The
インターフェース24は、通信部26、カードスロット28、プリンタ30との間で通信を行なうものである。
通信部26は、図3に示すように無線回線を経由して回転翼機40の通信部56と通信を行なうものである。
カードスロット28は、カード型の記録媒体が装脱可能に装着されるものである。
プリンタ30は、文字や画像を印刷するものであり、本実施の形態では、トラフィカビリティ推定装置10によって推定されたトラフィカビリティにまつわる情報を印刷出力するものである。The
As shown in FIG. 3, the
The
The
CPU12は、図2に示すように、上記プログラムを実行することにより、ハードディスク装置18を学習モデル32を記録したデータベースとして機能させるものであり、また、上記プログラムを実行することにより、情報取得部34と、推定部36と、地図生成部38とを実現するものである。
本実施の形態では、土種および含水量と相対反射率との関係を機械学習による学習モデルを用いて解析する。以下では各種データを図面として視覚化できるよう2次元化しているが、実際にはそれ以上の次元数のデータを含んでいる。As shown in FIG. 2, the
In the present embodiment, the relationship between soil type and water content and relative reflectance is analyzed using a learning model based on machine learning. In the following, various data are two-dimensionalized so that they can be visualized as a drawing, but actually, data of more dimensions is included.
学習モデル32は、土種類学習モデル32Aと、含水量学習モデル32Bと、トラフィカビリティ学習モデル32Cとを含んで構成されている。
土種類学習モデル32Aは、土の種類と土の相対反射率のパターンとの関係を規定するものである。
ここで土の種類とは、土壌の性質毎に種類分けされた土壌種別と呼ばれているものであり、以下のような土壌種別が例示される。
岩屑土、砂丘未熟土、黒ボク土、多湿黒ボク土、黒ボクグライ土、褐色森林土、灰色台地土、グライ台地土、赤色土、黄色土、暗赤色土、褐色低地土、灰色低地土、グライ土、黒泥土、泥炭土。
土の相対反射率とは、土に光を照射したときに土から反射される光の強度である。
土の相対反射率のパターンは土の種類に対応して異なっている。
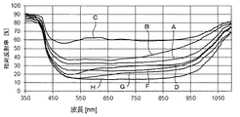
例えば、図4には、7種類の土(A〜H)を絶乾状態にして測定した相対反射率を示している。図4に示すように、各土A〜Hによって相対反射率のパターンが異なっているが、それら土の含水量が変化しても相対反射率の特徴は保たれる。
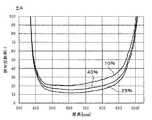
例えば、図5は図4の土A、図6は図4の土B、図7は図4の土Cについて、それぞれ含水量を変化させて測定した相対反射率である。
図11に示すように、土種類学習モデル32Aは、上述した土の種類A、B、C、……、Zと、土の相対反射率のパターンa、b、c、……、zとを関連付けて構成されている。
土種類学習モデル32Aは、土の種類毎に相対反射率のパターン、すなわち、相対反射率情報を後述するハイパースペクトルカメラ50を用いて実測することによって構築される。
また、本実施の形態では、土種類学習モデル32Aにおける相対反射率のパターンは、400nm以上1100nm以下の波長範囲で測定されたものとした。
400nm以上1100nm以下の波長範囲で測定すると、ハイパースペクトルカメラで実測した場合に生成される相対反射率の画像サイズの軽減化を図ることができデータ処理の高速化を図る上で有利となり、土の種類を正確に効率的に判定する上で有利となる。The
The soil
Here, the type of soil is called a soil type classified according to the nature of the soil, and the following soil types are exemplified.
Debris soil, dune immature soil, black my soil, humid black my soil, black mysterious soil, brown forest soil, gray plateau soil, glai plateau soil, red soil, yellow soil, dark red soil, brown lowland soil, gray lowland soil , Glai, black mud, peat soil.
The relative reflectance of the soil is the intensity of light reflected from the soil when the soil is irradiated with light.
The pattern of relative reflectance of the soil differs depending on the type of soil.
For example, FIG. 4 shows the relative reflectance measured with seven types of soils (A to H) in an absolutely dry state. As shown in FIG. 4, the relative reflectance patterns are different for each of the soils A to H, but the characteristics of the relative reflectance are maintained even when the water content of the soils changes.
For example, FIG. 5 shows the relative reflectance measured by changing the water content for soil A in FIG. 4, FIG. 6 for soil B in FIG. 4, and FIG. 7 for soil C in FIG.
As shown in FIG. 11, the soil
The soil
In the present embodiment, the pattern of relative reflectance in the soil
Measuring in the wavelength range of 400 nm or more and 1100 nm or less is advantageous in reducing the image size of the relative reflectance generated when actually measured with a hyperspectral camera, which is advantageous for speeding up data processing. This is advantageous in determining the type accurately and efficiently.
含水量学習モデル32Bは、土の種類と土の特定の波長の相対反射率と土の含水量との関係を規定するものである。
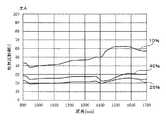
例えば、図8〜図10に示すように、土A、土B、土Cの特定の波長における相対反射率を含水量を変化させて測定すると、同じ含水量であっても土の種類に応じた特定の相対反射率となることがわかる。
図12に示すように、含水量学習モデル32Bは、上述した土の種類A、B、C、……、Zと、土の特定の波長の相対反射率とを関連付けて構成されている。
本実施の形態では、特定の波長を960nm付近の波長と1450nm付近の波長との2種類の波長とした。
この2種類の波長とすると、相対反射率に対応する含水量のばらつきが少ないため、土の含水量の特定を精度良く行なう上で有利となる。
この理由は、判別する波長のバンドを2つ利用し、片方を較正バンドとする事で含水量をより正確に測定できるからである。
含水量学習モデル32Bは、土の種類毎に、含水量を変えながら土の特定の波長の相対反射率を実測することにより構築される。
なお、図12の例では、含水量を25%毎に示しているが、含水量をもっと細かい単位、例えば、10%毎に示すなど任意である。
また、図12の相対反射率の数値は実際の数値ではなく、大小関係をわかりやすく表示したものである。The moisture
For example, as shown in FIGS. 8 to 10, when the relative reflectance at specific wavelengths of soil A, soil B, and soil C is measured while changing the water content, even if the water content is the same, it depends on the type of soil. It can be seen that the specific relative reflectance is obtained.
As shown in FIG. 12, the water
In the present embodiment, the specific wavelengths are two types of wavelengths, a wavelength near 960 nm and a wavelength near 1450 nm.
When these two types of wavelengths are used, there is little variation in the moisture content corresponding to the relative reflectance, which is advantageous in accurately identifying the moisture content of the soil.
This is because the moisture content can be measured more accurately by using two bands of wavelengths to be discriminated and using one as a calibration band.
The water
In the example of FIG. 12, the water content is shown every 25%, but the water content is arbitrary, such as showing a finer unit, for example, every 10%.
Further, the numerical values of the relative reflectance in FIG. 12 are not actual numerical values, but display the magnitude relationship in an easy-to-understand manner.
トラフィカビリティ学習モデル32Cは、土の種類と土の含水量と作業機械の走行に耐え得る地面の能力であるトラフィカビリティを示すトラフィカビリティ情報との関係を規定するものである。
図13に示すように、トラフィカビリティ学習モデル32Cは、土の種類と、土の含水量と、トラフィカビリティ情報とを関連付けて構成されている。
トラフィカビリティ情報は、JIS A1228規定のコーン指数試験によるコーン指数、あるいは、JIS A1219規定の標準貫入試験方法のN値で示すことができる。
トラフィカビリティ学習モデル32Cは、土の種類毎に土の含水量を変えてトラフィカビリティ情報を実測することによって構築される。
また、トラフィカビリティ情報として従来公知の様々な地盤の試験方法で特定される評価値を用いることができることは無論である。
しかしながら、本実施の形態のように、トラフィカビリティ情報を、従来から用いられているコーン指数、あるいは、N値で示すようにすると、トラフィカビリティの良否を的確に判断する上で有利となる。
なお、図13のトラフィカビリティ情報の数値は実際の数値ではなく、大小関係をわかりやすく表示したものである。The
As shown in FIG. 13, the
The trafficability information can be indicated by a cone index according to a cone index test defined in JIS A1228 or an N value of a standard penetration test method defined in JIS A1219.
The
Of course, as the trafficability information, evaluation values specified by various conventionally known ground test methods can be used.
However, as shown in the present embodiment, when the trafficability information is represented by a conventionally used cone index or N value, it is advantageous in accurately judging whether the trafficability is good or bad.
Note that the numerical values of the trafficability information in FIG. 13 are not actual numerical values, but display the magnitude relationship in an easy-to-understand manner.
情報取得部34は、対象となる土地の地面の相対反射率の多次元分布である相対反射率情報を土地の位置情報と共に取得するものである。
本実施の形態では、後述する回転翼機40によって測定された相対反射率情報および土地の位置情報を無線回線を介して通信部26が受信することにより情報取得部34による相対反射率情報および土地の位置情報の取得がなされる。
あるいは、回転翼機40によって測定された相対反射率情報および土地の位置情報を記録した記録媒体を、カードスロット28に挿入することで情報取得部34による相対反射率情報および土地の位置情報の取得がなされる。The
In the present embodiment, the relative reflectance information and land by the
Alternatively, the
推定部36は、相対反射率情報に基いて土種類学習モデル32Aから土種類を特定し、特定された土種類に基いて含水量学習モデル32Bから含水量を特定し、特定された土種類と特定された含水量とに基いてトラフィカビリティ学習モデル32Cからトラフィカビリティ情報を推定するものである。 The
地図生成部38は、推定されたトラフィカビリティ情報と取得された位置情報とを組み合わせた地図情報を生成するものである。
図14(A)、(B)に示すように、地図情報Dmは、例えば、トラフィカビリティ情報であるコーン指数やN値の大小に対応した色やハッチングにより表現される。
すなわち、トラフィカビリティ情報が異なる領域を識別するために各領域に異なるハッチングを施し、あるいは各領域を異なる色で表示している。
例えば、図14(A)は、トラフィカビリティ情報をN値で示す場合について示しており、領域d1はN<N1の範囲であり、領域d2はN1≦N<N2の範囲であり、領域d3はN2≦N<N3の範囲であり、領域d4はN3≦Nの範囲である。ただし、N1<N2<N3である。
生成された地図情報Dmは、表示部20に表示され、あるいは、プリンタ30によって印刷出力され、あるいは、ハードディスク装置やカード型記録媒体に記録される。The
As shown in FIGS. 14A and 14B, the map information Dm is expressed by, for example, a color corresponding to the cone index and the magnitude of the N value, which is traffic information, or hatching.
That is, different areas are hatched in order to identify areas with different trafficability information, or the areas are displayed in different colors.
For example, FIG. 14A shows the case where the trafficability information is indicated by an N value, where the region d1 is in the range of N <N1, the region d2 is in the range of N1 ≦ N <N2, and the region d3 is The range of N2 ≦ N <N3 is satisfied, and the region d4 is in the range of N3 ≦ N. However, N1 <N2 <N3.
The generated map information Dm is displayed on the
次に、図3を参照して回転翼機(ドローン)について説明する。
回転翼機40は、無人飛行体を構成するものであって、機体42と、複数のロータ44と、駆動部46と、カメラ48と、ハイパースペクトルカメラ50、測位部52と、記録部54、通信部56と、制御部58を含んで構成されている。
複数のロータ44は回転翼を構成するものである。
駆動部46は、複数のロータ44を個別に駆動することにより回転翼機40を飛行させるものである。
カメラ48は、機体42に設けられ、機体42の周囲を撮影して画像情報を生成するものであり、制御部58によって動作が制御される。
ハイパースペクトルカメラ50は、機体42に設けられ、対象となる土地の地面の相対反射率の多次元分布である相対反射率情報を生成するものである。Next, a rotary wing machine (drone) will be described with reference to FIG.
The
The plurality of
The
The
The
測位部52は、GPS衛星などの測位衛星から送信される測位信号を受信して、回転翼機40の現在位置(例えば緯度経度および標高など)を特定し、現在位置を示す位置情報を生成するものである。
測位部52で特定した回転翼機40の現在位置は、回転翼機40の飛行経路の制御等に用いてもよい。
記録部54は、ハイパースペクトルカメラ50で生成された相対反射率情報と測位部52で生成された位置情報を関連付けて記録媒体55に格納するものであり、記録媒体55は例えば着脱可能なカード型の記録媒体で構成されている。
通信部56は、機体42に設けられ、通信部26、リモートコントローラ60、管理端末62とそれぞれ無線回線を介して通信するものである。
通信部56は、相対反射率情報と、測位部52で生成された位置情報とを関連付けて通信部26に送信する。
通信部56は、作業員が所持するリモートコントローラ60と通信を行ない、リモートコントローラ60からの制御情報を受信する。
また、通信部56は、カメラ48で撮影された画像情報を管理端末62に送信する。
管理端末62は、リモートコントローラ60を所持している作業員が所持するものであり、例えばパーソナルコンピュータやタブレット端末、スマートホン等である。
管理端末62は、回転翼機40の通信部56と無線通信を行なう不図示の通信部を備え、回転翼機40の制御部58から送信される画像情報を受け付ける。
したがって、作業員が管理端末62に表示される画像を視認しつつリモートコントローラ60によって回転翼機40を遠隔制御できるように図られている。The
The current position of the
The
The
The
The
In addition, the
The
The
Accordingly, the operator can remotely control the
制御部58は、CPU、制御プログラムなどを格納・記憶するROM、制御プログラムの作動領域としてのRAM、各種データを書き換え可能に保持するEEPROMなどの記憶手段、周辺回路等とのインターフェースをとるインターフェースなどを含んで構成される。
制御部58は、通信部56で受信された制御情報に基いて駆動部46を介して各ロータ44を制御することにより機体42の飛行動作を制御する。
また、制御部58は、カメラ48で撮影された画像情報を通信部56を介して管理端末62に送信する。
また、制御部58は、ハイパースペクトルカメラ50で検出された相対反射率情報と、測位部52で生成された位置情報を受け付け、それら情報を関連付けて通信部56を介して通信部26に送信する。
また、制御部58は、相対反射率情報と位置情報を受け付け、それら情報を関連付けて記録部54から記憶媒体55に記憶させる。The
The
Further, the
Further, the
In addition, the
次にトラフィカビリティ推定装置10の動作について図15のフローチャートを参照して説明する。
まず、作業員はリモートコントローラ60、管理端末62を用いて回転翼機40を対象となる土地の上空に飛行させる(ステップS10)。
回転翼機40では、ハイパースペクトルカメラ50により土地の地面の相対反射率情報が検出されると共に、測位部52により位置情報を検出する(ステップS12)。
制御部58は、それら相対反射率情報と位置情報とを関連付けて記録部54により記憶媒体55に記憶させる(ステップS14)。
また、制御部58は、それら相対反射率情報と位置情報とを関連付けて通信部56を介して通信部26に送信させる(ステップS16)。
作業員は、対象となる土地に対する検出動作が終了したか否かを、例えば、管理端末62に表示される画像に基いて判断する(ステップS18)。
対象となる土地に対する検出動作が終了していなければ、ステップS12に戻りリモートコントローラ60、管理端末62を用いて回転翼機40の遠隔操作を行ない土地の検出を継続して行なう。
対象となる土地に対する検出動作が終了したならば、作業員はリモートコントローラ60、管理端末62を用いて回転翼機40を回収する(ステップS20)。
なお、情報取得部34は、通信部56を介して互いに関連付けられた相対反射率情報および位置情報をリアルタイムに取得している。
あるいは、情報取得部34は、回収した回転翼機40から取り外された記録媒体55がカードスロット28に挿入されることで互いに関連付けられた相対反射率情報および位置情報を取得してもよい。
推定部36は、情報取得部34により取得された相対反射率情報に基いて土種類学習モデル32Aから土種類を特定し、特定された土種類に基いて含水量学習モデル32Bから含水量を特定し、特定された土種類と特定された含水量とに基いてトラフィカビリティ学習モデル32Cからトラフィカビリティ情報を推定する(ステップS22)。
地図生成部38は、推定されたトラフィカビリティ情報と取得された位置情報とを組み合わせた地図情報Dmを生成する(ステップS24)。
生成された地図情報Dmは、図14に示すように、表示部20の画面に表示出力され、あるいは、プリンタ30により印刷出力される(ステップS26)。
以上でトラフィカビリティ推定装置10の動作が終了する。Next, the operation of the
First, the worker uses the
In the
The
Further, the
The worker determines whether or not the detection operation for the target land has been completed based on, for example, an image displayed on the management terminal 62 (step S18).
If the detection operation for the target land has not been completed, the process returns to step S12, and the
When the detection operation for the target land is completed, the worker collects the
The
Alternatively, the
The
The
As shown in FIG. 14, the generated map information Dm is displayed on the screen of the
Thus, the operation of the
本実施の形態によれば、対象となる土地の地面の相対反射率情報に基いて土の種類および含水量を特定し、その特定結果に基いてトラフィカビリティ情報を推定するようにした。
したがって、対象となる土地の地面にコーン貫入試験機を運び込んでコーン値やN値を実測する必要がないため、例えば、土地にぬかるみがあったり、土地の地盤が不安定であったりして実測する作業が困難、あるいは、危険となるような場合であっても、土地のトラフィカビリティ情報を安全に確実に推定する上で有利となる。
そのため、作業車両(重機)を使用することができるか否かの判定を的確に行なう上で有利となる。
また、災害復旧現場の他、建物の基礎工事を行なう土地のトラフィカビリティ情報を得ることにより、土地の地面に打つ杭の本数をトラフィカビリティ情報に基いて適切に決定する上でも有利となる。According to the present embodiment, the soil type and water content are specified based on the relative reflectance information of the ground of the target land, and the trafficability information is estimated based on the specification result.
Therefore, it is not necessary to carry a cone penetration tester to the ground of the target land and actually measure the cone value or N value. For example, the land is muddy or the ground of the land is unstable. Even if it is difficult or dangerous, it is advantageous to safely and reliably estimate the traffic information of the land.
Therefore, it is advantageous in accurately determining whether or not a work vehicle (heavy equipment) can be used.
In addition to the disaster recovery site, obtaining information on the trafficability of the land on which the foundation construction of the building is performed is advantageous in appropriately determining the number of piles hitting the ground of the land based on the trafficability information.
また、本実施の形態によれば、対象となる土地の地面の相対反射率情報に基いて、土種類学習モデル32Aと、含水量学習モデル32Bと、トラフィカビリティ学習モデル32Cからトラフィカビリティ情報を推定するようにした。
したがって、それら学習モデル32A、32B、32Cを新たな測定結果に基いて更新することによりトラフィカビリティ情報の推定を精度良く行なう上で有利となる。Further, according to the present embodiment, the trafficability information is estimated from the soil
Therefore, it is advantageous in accurately estimating the trafficability information by updating these learning
また、本実施の形態によれば、推定されたトラフィカビリティ情報と取得された位置情報とを組み合わせた地図情報を生成するようにした。
したがって、地図情報に基いて、作業車両が走行可能な経路を事前に設定する上で有利となる。そのため、特に災害復旧現場のように迅速な作業が要求される場合に作業効率の向上を図る上で有利となる。Moreover, according to this Embodiment, the map information which combined the estimated traffic information and the acquired position information was produced | generated.
Therefore, it is advantageous for setting in advance a route on which the work vehicle can travel based on the map information. For this reason, it is advantageous in improving work efficiency particularly when quick work is required, such as at a disaster recovery site.
また、本実施の形態によれば、回転翼機40に搭載したハイパースペクトルカメラ50と、測位部52と、記録部54を用いて相対反射率情報および位置情報を記録媒体に記憶させ、相対反射率情報および位置情報の取得を記録媒体を用いて行なうようにした。
したがって、対象となる土地から離れた場所において回転翼機40を遠隔制御することで、土地の相対反射率情報および位置情報を取得することができるため、土地のトラフィカビリティ情報を安全に確実に推定する上でより有利となる。Further, according to the present embodiment, the relative reflectance information and the position information are stored in the recording medium using the
Therefore, by remotely controlling the
また、本実施の形態によれば、回転翼機40に搭載したハイパースペクトルカメラ50と、測位部52と、通信部56を用いて相対反射率情報および位置情報の取得を無線回線を用いて行なうようにした。
したがって、対象となる土地から離れた場所において回転翼機40を遠隔制御することで、土地の相対反射率情報および位置情報をリアルタイムに取得することができるため、土地のトラフィカビリティ情報を安全に確実にかつ早期に推定する上で有利となる。Further, according to the present embodiment, acquisition of relative reflectance information and position information is performed using a wireless line using the
Therefore, by remotely controlling the
10 トラフィカビリティ推定装置
32A 土種類学習モデル
32B 含水量学習モデル
32C トラフィカビリティ学習モデル
34 情報取得部
36 推定部
38 地図生成部
40 回転翼機(無人飛行体)
50 ハイパースペクトルカメラ
52 測位部
54 記録部
55 記録媒体
56 通信部DESCRIPTION OF
50
Claims (7)
Translated fromJapanese前記相対反射率情報に基いて土の種類および含水量を特定し、その特定結果に基いて前記地面のトラフィカビリティ情報を推定する推定部と、
を備えることを特徴とするトラフィカビリティ推定装置。An information acquisition unit that acquires relative reflectance information that is a multi-dimensional distribution of relative reflectance of the ground of the target land;
An estimation unit that identifies soil type and water content based on the relative reflectance information, and estimates the ground trafficability information based on the identification result;
A trafficability estimation apparatus comprising:
前記推定部は、前記相対反射率情報に基いて土種類学習モデルから前記土種類を特定し、前記特定された土種類に基いて含水量学習モデルから含水量を特定し、前記特定された土種類と前記特定された含水量とに基いて前記トラフィカビリティ学習モデルから前記トラフィカビリティ情報を推定する、
ことを特徴とする請求項1記載のトラフィカビリティ推定装置。A trafficability learning model that defines the relationship between the soil type, the moisture content of the soil, and the trafficability information indicating the trafficability that is the capability of the ground that can withstand running of a work machine,
The estimation unit identifies the soil type from a soil type learning model based on the relative reflectance information, identifies a water content from a water content learning model based on the identified soil type, and identifies the identified soil Estimating the trafficability information from the trafficability learning model based on the type and the identified water content;
The trafficability estimation apparatus according to claim 1, wherein:
前記含水量学習モデルは、前記土の種類と前記土の特定の波長における相対反射率と前記土の含水量との関係を規定するものである、
ことを特徴とする請求項2記載のトラフィカビリティ推定装置。The soil type learning model defines the relationship between the soil type and the relative reflectance pattern of the soil,
The moisture content learning model defines the relationship between the soil type, the relative reflectance at a specific wavelength of the soil, and the moisture content of the soil.
The trafficability estimation apparatus according to claim 2, wherein:
前記推定されたトラフィカビリティ情報と前記取得された位置情報とを組み合わせた地図情報を生成する地図生成部をさらに備える、
ことを特徴とする請求項1から3の何れか1項記載のトラフィカビリティ推定装置。The information acquisition unit acquires the relative reflectance information together with position information of the land,
A map generation unit that generates map information that combines the estimated trafficability information and the acquired position information;
The trafficability estimation apparatus according to any one of claims 1 to 3, wherein
測位衛星から測位信号を受信して前記位置情報を生成する測位部と、
前記相対反射率情報および前記位置情報を記録媒体に記録する記録部と、
前記ハイパースペクトルカメラおよび前記測位部と前記記録部とを搭載した無人飛行体とをさらに備え、
前記情報取得部による前記相対反射率情報および前記位置情報の取得は前記記録媒体を用いてなされる、
ことを特徴とする請求項4記載のトラフィカビリティ推定装置。A hyperspectral camera that images the land and generates the relative reflectance information;
A positioning unit that receives a positioning signal from a positioning satellite and generates the position information;
A recording unit for recording the relative reflectance information and the position information on a recording medium;
Further comprising an unmanned air vehicle equipped with the hyperspectral camera and the positioning unit and the recording unit,
Acquisition of the relative reflectance information and the position information by the information acquisition unit is performed using the recording medium.
The trafficability estimation apparatus according to claim 4, wherein:
測位衛星から測位信号を受信して前記位置情報を生成する測位部と、
前記相対反射率情報および前記位置情報を無線回線を介して通信する通信部と、
前記ハイパースペクトルカメラおよび前記測位部と前記通信部とを搭載した無人飛行体とをさらに備え、
前記情報取得部による前記相対反射率情報および前記位置情報の取得は前記無線回線を用いてなされる、
ことを特徴とする請求項4記載のトラフィカビリティ推定装置。A hyperspectral camera that images the land and generates the relative reflectance information;
A positioning unit that receives a positioning signal from a positioning satellite and generates the position information;
A communication unit that communicates the relative reflectance information and the position information via a wireless line;
Further comprising an unmanned air vehicle equipped with the hyperspectral camera and the positioning unit and the communication unit,
Acquisition of the relative reflectance information and the position information by the information acquisition unit is performed using the wireless line.
The trafficability estimation apparatus according to claim 4, wherein:
前記情報処理装置を、
対象となる土地の地面の相対反射率の多次元分布である相対反射率情報を取得する情報取得部と、
前記相対反射率情報に基いて土の種類および含水量を特定し、その特定結果に基いて前記地面のトラフィカビリティ情報を推定する推定部と、
して機能させるためのプログラム。A program executed in the information processing apparatus,
The information processing apparatus;
An information acquisition unit that acquires relative reflectance information that is a multi-dimensional distribution of relative reflectance of the ground of the target land;
An estimation unit that identifies soil type and water content based on the relative reflectance information, and estimates the ground trafficability information based on the identification result;
Program to make it function.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017048046 | 2017-03-14 | ||
| JP2017048046 | 2017-03-14 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018151388Atrue JP2018151388A (en) | 2018-09-27 |
| JP7075787B2 JP7075787B2 (en) | 2022-05-26 |
Family
ID=63679549
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018044723AActiveJP7075787B2 (en) | 2017-03-14 | 2018-03-12 | Trafficability estimator and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7075787B2 (en) |
Cited By (61)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112632750A (en)* | 2020-12-01 | 2021-04-09 | 北方信息控制研究院集团有限公司 | Simulation modeling method and system for mutual coupling of different elements in virtual battlefield environment |
| US11079725B2 (en) | 2019-04-10 | 2021-08-03 | Deere & Company | Machine control using real-time model |
| US11178818B2 (en) | 2018-10-26 | 2021-11-23 | Deere & Company | Harvesting machine control system with fill level processing based on yield data |
| US11234366B2 (en) | 2019-04-10 | 2022-02-01 | Deere & Company | Image selection for machine control |
| US11240961B2 (en) | 2018-10-26 | 2022-02-08 | Deere & Company | Controlling a harvesting machine based on a geo-spatial representation indicating where the harvesting machine is likely to reach capacity |
| US20220110251A1 (en) | 2020-10-09 | 2022-04-14 | Deere & Company | Crop moisture map generation and control system |
| US11467605B2 (en) | 2019-04-10 | 2022-10-11 | Deere & Company | Zonal machine control |
| US11474523B2 (en) | 2020-10-09 | 2022-10-18 | Deere & Company | Machine control using a predictive speed map |
| US11477940B2 (en) | 2020-03-26 | 2022-10-25 | Deere & Company | Mobile work machine control based on zone parameter modification |
| US11592822B2 (en) | 2020-10-09 | 2023-02-28 | Deere & Company | Machine control using a predictive map |
| US11589509B2 (en) | 2018-10-26 | 2023-02-28 | Deere & Company | Predictive machine characteristic map generation and control system |
| US11635765B2 (en) | 2020-10-09 | 2023-04-25 | Deere & Company | Crop state map generation and control system |
| US11641800B2 (en) | 2020-02-06 | 2023-05-09 | Deere & Company | Agricultural harvesting machine with pre-emergence weed detection and mitigation system |
| US11650587B2 (en) | 2020-10-09 | 2023-05-16 | Deere & Company | Predictive power map generation and control system |
| US11653588B2 (en) | 2018-10-26 | 2023-05-23 | Deere & Company | Yield map generation and control system |
| US11675354B2 (en) | 2020-10-09 | 2023-06-13 | Deere & Company | Machine control using a predictive map |
| US11672203B2 (en) | 2018-10-26 | 2023-06-13 | Deere & Company | Predictive map generation and control |
| US11711995B2 (en) | 2020-10-09 | 2023-08-01 | Deere & Company | Machine control using a predictive map |
| US11727680B2 (en) | 2020-10-09 | 2023-08-15 | Deere & Company | Predictive map generation based on seeding characteristics and control |
| US11778945B2 (en) | 2019-04-10 | 2023-10-10 | Deere & Company | Machine control using real-time model |
| US11825768B2 (en) | 2020-10-09 | 2023-11-28 | Deere & Company | Machine control using a predictive map |
| US11844311B2 (en) | 2020-10-09 | 2023-12-19 | Deere & Company | Machine control using a predictive map |
| US11845449B2 (en) | 2020-10-09 | 2023-12-19 | Deere & Company | Map generation and control system |
| US11849672B2 (en) | 2020-10-09 | 2023-12-26 | Deere & Company | Machine control using a predictive map |
| US11849671B2 (en) | 2020-10-09 | 2023-12-26 | Deere & Company | Crop state map generation and control system |
| US11864483B2 (en) | 2020-10-09 | 2024-01-09 | Deere & Company | Predictive map generation and control system |
| US11874669B2 (en) | 2020-10-09 | 2024-01-16 | Deere & Company | Map generation and control system |
| US11889787B2 (en) | 2020-10-09 | 2024-02-06 | Deere & Company | Predictive speed map generation and control system |
| US11889788B2 (en) | 2020-10-09 | 2024-02-06 | Deere & Company | Predictive biomass map generation and control |
| US11895948B2 (en) | 2020-10-09 | 2024-02-13 | Deere & Company | Predictive map generation and control based on soil properties |
| US11927459B2 (en) | 2020-10-09 | 2024-03-12 | Deere & Company | Machine control using a predictive map |
| US11946747B2 (en) | 2020-10-09 | 2024-04-02 | Deere & Company | Crop constituent map generation and control system |
| US11957072B2 (en) | 2020-02-06 | 2024-04-16 | Deere & Company | Pre-emergence weed detection and mitigation system |
| US11983009B2 (en) | 2020-10-09 | 2024-05-14 | Deere & Company | Map generation and control system |
| US12013245B2 (en) | 2020-10-09 | 2024-06-18 | Deere & Company | Predictive map generation and control system |
| US12035648B2 (en) | 2020-02-06 | 2024-07-16 | Deere & Company | Predictive weed map generation and control system |
| JP7525844B2 (en) | 2020-06-11 | 2024-07-31 | 国立大学法人 東京大学 | Moisture content estimation method, cone index estimation method, cone index estimation system, vehicle and unmanned aerial vehicle |
| JP7529208B2 (en) | 2020-06-11 | 2024-08-06 | 国立大学法人 東京大学 | Object estimation method and cone index estimation system |
| US12058951B2 (en) | 2022-04-08 | 2024-08-13 | Deere & Company | Predictive nutrient map and control |
| US12069978B2 (en) | 2018-10-26 | 2024-08-27 | Deere & Company | Predictive environmental characteristic map generation and control system |
| US12069986B2 (en) | 2020-10-09 | 2024-08-27 | Deere & Company | Map generation and control system |
| US12082531B2 (en) | 2022-01-26 | 2024-09-10 | Deere & Company | Systems and methods for predicting material dynamics |
| US12127500B2 (en) | 2021-01-27 | 2024-10-29 | Deere & Company | Machine control using a map with regime zones |
| WO2024232937A1 (en)* | 2023-05-08 | 2024-11-14 | Esco Group Llc | Material imaging system and method |
| US12178158B2 (en) | 2020-10-09 | 2024-12-31 | Deere & Company | Predictive map generation and control system for an agricultural work machine |
| US12229886B2 (en) | 2021-10-01 | 2025-02-18 | Deere & Company | Historical crop state model, predictive crop state map generation and control system |
| US12225846B2 (en) | 2020-02-06 | 2025-02-18 | Deere & Company | Machine control using a predictive map |
| US12245549B2 (en) | 2022-01-11 | 2025-03-11 | Deere & Company | Predictive response map generation and control system |
| US12250905B2 (en) | 2020-10-09 | 2025-03-18 | Deere & Company | Machine control using a predictive map |
| US12284934B2 (en) | 2022-04-08 | 2025-04-29 | Deere & Company | Systems and methods for predictive tractive characteristics and control |
| US12298767B2 (en) | 2022-04-08 | 2025-05-13 | Deere & Company | Predictive material consumption map and control |
| US12295288B2 (en) | 2022-04-05 | 2025-05-13 | Deere &Company | Predictive machine setting map generation and control system |
| US12302791B2 (en) | 2021-12-20 | 2025-05-20 | Deere & Company | Crop constituents, predictive mapping, and agricultural harvester control |
| US12310286B2 (en) | 2021-12-14 | 2025-05-27 | Deere & Company | Crop constituent sensing |
| US12329148B2 (en) | 2020-02-06 | 2025-06-17 | Deere & Company | Predictive weed map and material application machine control |
| US12329065B2 (en) | 2020-10-09 | 2025-06-17 | Deere & Company | Map generation and control system |
| US12329050B2 (en) | 2020-10-09 | 2025-06-17 | Deere & Company | Machine control using a predictive map |
| US12358493B2 (en) | 2022-04-08 | 2025-07-15 | Deere & Company | Systems and methods for predictive power requirements and control |
| US12386354B2 (en) | 2020-10-09 | 2025-08-12 | Deere & Company | Predictive power map generation and control system |
| US12419220B2 (en) | 2020-10-09 | 2025-09-23 | Deere & Company | Predictive map generation and control system |
| US12422847B2 (en) | 2020-10-09 | 2025-09-23 | Deere & Company | Predictive agricultural model and map generation |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012150068A (en)* | 2011-01-21 | 2012-08-09 | Zukosha:Kk | Method for predicting wet and dry condition of soil and device for the same |
| JP2015040851A (en)* | 2013-08-23 | 2015-03-02 | 富士通株式会社 | Information processing program, information processing method, and information processing apparatus |
| JP2015105898A (en)* | 2013-11-30 | 2015-06-08 | 鹿島建設株式会社 | Surface water quantity management method and system of ground material |
| US20160247075A1 (en)* | 2015-02-20 | 2016-08-25 | Iteris, Inc. | Modeling of soil tilth and mechanical strength for field workability of cultivation activity from diagnosis and prediction of soil and weather conditions associated with user-provided feedback |
| JP2017015527A (en)* | 2015-06-30 | 2017-01-19 | 株式会社トプコン | Wide area sensor system, flight detection method and program |
- 2018
- 2018-03-12JPJP2018044723Apatent/JP7075787B2/enactiveActive
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012150068A (en)* | 2011-01-21 | 2012-08-09 | Zukosha:Kk | Method for predicting wet and dry condition of soil and device for the same |
| JP2015040851A (en)* | 2013-08-23 | 2015-03-02 | 富士通株式会社 | Information processing program, information processing method, and information processing apparatus |
| JP2015105898A (en)* | 2013-11-30 | 2015-06-08 | 鹿島建設株式会社 | Surface water quantity management method and system of ground material |
| US20160247075A1 (en)* | 2015-02-20 | 2016-08-25 | Iteris, Inc. | Modeling of soil tilth and mechanical strength for field workability of cultivation activity from diagnosis and prediction of soil and weather conditions associated with user-provided feedback |
| JP2017015527A (en)* | 2015-06-30 | 2017-01-19 | 株式会社トプコン | Wide area sensor system, flight detection method and program |
Non-Patent Citations (1)
| Title |
|---|
| WELLS, L. G. ET AL.: "The response of various soil strength indices to changing water content and bulk density", TRANSACTIONS OF THE ASAE, vol. 21, no. 5, JPN6021048483, 1978, pages 854 - 861, ISSN: 0004656151* |
Cited By (74)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11653588B2 (en) | 2018-10-26 | 2023-05-23 | Deere & Company | Yield map generation and control system |
| US12069978B2 (en) | 2018-10-26 | 2024-08-27 | Deere & Company | Predictive environmental characteristic map generation and control system |
| US11178818B2 (en) | 2018-10-26 | 2021-11-23 | Deere & Company | Harvesting machine control system with fill level processing based on yield data |
| US11672203B2 (en) | 2018-10-26 | 2023-06-13 | Deere & Company | Predictive map generation and control |
| US11240961B2 (en) | 2018-10-26 | 2022-02-08 | Deere & Company | Controlling a harvesting machine based on a geo-spatial representation indicating where the harvesting machine is likely to reach capacity |
| US12010947B2 (en) | 2018-10-26 | 2024-06-18 | Deere & Company | Predictive machine characteristic map generation and control system |
| US11589509B2 (en) | 2018-10-26 | 2023-02-28 | Deere & Company | Predictive machine characteristic map generation and control system |
| US12178156B2 (en) | 2018-10-26 | 2024-12-31 | Deere & Company | Predictive map generation and control |
| US12171153B2 (en) | 2018-10-26 | 2024-12-24 | Deere & Company | Yield map generation and control system |
| US11079725B2 (en) | 2019-04-10 | 2021-08-03 | Deere & Company | Machine control using real-time model |
| US11467605B2 (en) | 2019-04-10 | 2022-10-11 | Deere & Company | Zonal machine control |
| US11650553B2 (en) | 2019-04-10 | 2023-05-16 | Deere & Company | Machine control using real-time model |
| US11829112B2 (en) | 2019-04-10 | 2023-11-28 | Deere & Company | Machine control using real-time model |
| US11234366B2 (en) | 2019-04-10 | 2022-02-01 | Deere & Company | Image selection for machine control |
| US11778945B2 (en) | 2019-04-10 | 2023-10-10 | Deere & Company | Machine control using real-time model |
| US11641800B2 (en) | 2020-02-06 | 2023-05-09 | Deere & Company | Agricultural harvesting machine with pre-emergence weed detection and mitigation system |
| US12225846B2 (en) | 2020-02-06 | 2025-02-18 | Deere & Company | Machine control using a predictive map |
| US12329148B2 (en) | 2020-02-06 | 2025-06-17 | Deere & Company | Predictive weed map and material application machine control |
| US11957072B2 (en) | 2020-02-06 | 2024-04-16 | Deere & Company | Pre-emergence weed detection and mitigation system |
| US12035648B2 (en) | 2020-02-06 | 2024-07-16 | Deere & Company | Predictive weed map generation and control system |
| US11477940B2 (en) | 2020-03-26 | 2022-10-25 | Deere & Company | Mobile work machine control based on zone parameter modification |
| JP7525844B2 (en) | 2020-06-11 | 2024-07-31 | 国立大学法人 東京大学 | Moisture content estimation method, cone index estimation method, cone index estimation system, vehicle and unmanned aerial vehicle |
| JP7529208B2 (en) | 2020-06-11 | 2024-08-06 | 国立大学法人 東京大学 | Object estimation method and cone index estimation system |
| US11946747B2 (en) | 2020-10-09 | 2024-04-02 | Deere & Company | Crop constituent map generation and control system |
| US12080062B2 (en) | 2020-10-09 | 2024-09-03 | Deere & Company | Predictive map generation based on seeding characteristics and control |
| US11845449B2 (en) | 2020-10-09 | 2023-12-19 | Deere & Company | Map generation and control system |
| US11849672B2 (en) | 2020-10-09 | 2023-12-26 | Deere & Company | Machine control using a predictive map |
| US11849671B2 (en) | 2020-10-09 | 2023-12-26 | Deere & Company | Crop state map generation and control system |
| US11864483B2 (en) | 2020-10-09 | 2024-01-09 | Deere & Company | Predictive map generation and control system |
| US11871697B2 (en) | 2020-10-09 | 2024-01-16 | Deere & Company | Crop moisture map generation and control system |
| US11874669B2 (en) | 2020-10-09 | 2024-01-16 | Deere & Company | Map generation and control system |
| US11889787B2 (en) | 2020-10-09 | 2024-02-06 | Deere & Company | Predictive speed map generation and control system |
| US11889788B2 (en) | 2020-10-09 | 2024-02-06 | Deere & Company | Predictive biomass map generation and control |
| US11895948B2 (en) | 2020-10-09 | 2024-02-13 | Deere & Company | Predictive map generation and control based on soil properties |
| US11927459B2 (en) | 2020-10-09 | 2024-03-12 | Deere & Company | Machine control using a predictive map |
| US12422847B2 (en) | 2020-10-09 | 2025-09-23 | Deere & Company | Predictive agricultural model and map generation |
| US11825768B2 (en) | 2020-10-09 | 2023-11-28 | Deere & Company | Machine control using a predictive map |
| US11983009B2 (en) | 2020-10-09 | 2024-05-14 | Deere & Company | Map generation and control system |
| US12419220B2 (en) | 2020-10-09 | 2025-09-23 | Deere & Company | Predictive map generation and control system |
| US12013245B2 (en) | 2020-10-09 | 2024-06-18 | Deere & Company | Predictive map generation and control system |
| US12013698B2 (en) | 2020-10-09 | 2024-06-18 | Deere & Company | Machine control using a predictive map |
| US11727680B2 (en) | 2020-10-09 | 2023-08-15 | Deere & Company | Predictive map generation based on seeding characteristics and control |
| US12048271B2 (en) | 2020-10-09 | 2024-07-30 | Deere &Company | Crop moisture map generation and control system |
| US11711995B2 (en) | 2020-10-09 | 2023-08-01 | Deere & Company | Machine control using a predictive map |
| US11675354B2 (en) | 2020-10-09 | 2023-06-13 | Deere & Company | Machine control using a predictive map |
| US12386354B2 (en) | 2020-10-09 | 2025-08-12 | Deere & Company | Predictive power map generation and control system |
| US11650587B2 (en) | 2020-10-09 | 2023-05-16 | Deere & Company | Predictive power map generation and control system |
| US12069986B2 (en) | 2020-10-09 | 2024-08-27 | Deere & Company | Map generation and control system |
| US11844311B2 (en) | 2020-10-09 | 2023-12-19 | Deere & Company | Machine control using a predictive map |
| US12329050B2 (en) | 2020-10-09 | 2025-06-17 | Deere & Company | Machine control using a predictive map |
| US12329065B2 (en) | 2020-10-09 | 2025-06-17 | Deere & Company | Map generation and control system |
| US20220110251A1 (en) | 2020-10-09 | 2022-04-14 | Deere & Company | Crop moisture map generation and control system |
| US11635765B2 (en) | 2020-10-09 | 2023-04-25 | Deere & Company | Crop state map generation and control system |
| US11592822B2 (en) | 2020-10-09 | 2023-02-28 | Deere & Company | Machine control using a predictive map |
| US12178158B2 (en) | 2020-10-09 | 2024-12-31 | Deere & Company | Predictive map generation and control system for an agricultural work machine |
| US12193350B2 (en) | 2020-10-09 | 2025-01-14 | Deere & Company | Machine control using a predictive map |
| US12216472B2 (en) | 2020-10-09 | 2025-02-04 | Deere & Company | Map generation and control system |
| US12271196B2 (en) | 2020-10-09 | 2025-04-08 | Deere &Company | Machine control using a predictive map |
| US11474523B2 (en) | 2020-10-09 | 2022-10-18 | Deere & Company | Machine control using a predictive speed map |
| US12250905B2 (en) | 2020-10-09 | 2025-03-18 | Deere & Company | Machine control using a predictive map |
| CN112632750A (en)* | 2020-12-01 | 2021-04-09 | 北方信息控制研究院集团有限公司 | Simulation modeling method and system for mutual coupling of different elements in virtual battlefield environment |
| CN112632750B (en)* | 2020-12-01 | 2023-09-26 | 北方信息控制研究院集团有限公司 | Simulation modeling method and system for mutual coupling of different elements of virtual battlefield environment |
| US12127500B2 (en) | 2021-01-27 | 2024-10-29 | Deere & Company | Machine control using a map with regime zones |
| US12229886B2 (en) | 2021-10-01 | 2025-02-18 | Deere & Company | Historical crop state model, predictive crop state map generation and control system |
| US12310286B2 (en) | 2021-12-14 | 2025-05-27 | Deere & Company | Crop constituent sensing |
| US12302791B2 (en) | 2021-12-20 | 2025-05-20 | Deere & Company | Crop constituents, predictive mapping, and agricultural harvester control |
| US12245549B2 (en) | 2022-01-11 | 2025-03-11 | Deere & Company | Predictive response map generation and control system |
| US12082531B2 (en) | 2022-01-26 | 2024-09-10 | Deere & Company | Systems and methods for predicting material dynamics |
| US12295288B2 (en) | 2022-04-05 | 2025-05-13 | Deere &Company | Predictive machine setting map generation and control system |
| US12358493B2 (en) | 2022-04-08 | 2025-07-15 | Deere & Company | Systems and methods for predictive power requirements and control |
| US12058951B2 (en) | 2022-04-08 | 2024-08-13 | Deere & Company | Predictive nutrient map and control |
| US12298767B2 (en) | 2022-04-08 | 2025-05-13 | Deere & Company | Predictive material consumption map and control |
| US12284934B2 (en) | 2022-04-08 | 2025-04-29 | Deere & Company | Systems and methods for predictive tractive characteristics and control |
| WO2024232937A1 (en)* | 2023-05-08 | 2024-11-14 | Esco Group Llc | Material imaging system and method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7075787B2 (en) | 2022-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7075787B2 (en) | Trafficability estimator and program | |
| CN109669401B (en) | Unmanned aerial vehicle assisted worksite data acquisition | |
| US11733042B2 (en) | Information processing apparatus, information processing method, program, and ground marker system | |
| Chisholm et al. | UAV LiDAR for below-canopy forest surveys | |
| US9389084B1 (en) | Detecting changes in aerial images | |
| EP4358008A1 (en) | Vegetation management system and vegetation management method | |
| Lu et al. | Optimal spatial resolution of Unmanned Aerial Vehicle (UAV)-acquired imagery for species classification in a heterogeneous grassland ecosystem | |
| JP7172400B2 (en) | Geological evaluation system, geological evaluation method and geological evaluation program | |
| US9098745B2 (en) | Sampling position-fixing system | |
| CN108875620B (en) | Method and system for monitoring invasive plants | |
| CN108055094B (en) | Unmanned aerial vehicle manipulator frequency spectrum feature identification and positioning method | |
| CN109813286A (en) | A kind of lodging disaster remote sensing damage identification method based on unmanned plane | |
| CN117891274B (en) | Unmanned aerial vehicle route big data planning system and method for water conservancy mapping | |
| JP2025526499A (en) | Vegetation management system and vegetation management method | |
| JP6829800B2 (en) | Receiver suitability determination method and receiver suitability determination system | |
| EP3763145B1 (en) | 3d spectrum measurement and mapping | |
| CN113412498A (en) | Automatic remove field reconnaissance sensor data and image classification equipment | |
| WO2015145764A1 (en) | Image generating system and image generating method | |
| US10352769B2 (en) | Self-calibrating spectral models | |
| Goodbody | Assessing the role of digital aerial photogrammetry for characterizing forest structure and enhancing forest inventories | |
| Park et al. | Application of unmanned aerial vehicle for detection of pine wilt disease | |
| Hoffmann et al. | From UAS Data Acquisition to Actionable Information–How an End-to-End Solution Helps Oil Palm Plantation Operators to Perform a More Sustainable Plantation Management | |
| Torsvik et al. | Detection of macroplastic on beaches using drones and object-based image analysis | |
| Rachmawan et al. | Temporal difference and density-based learning method applied for deforestation detection using ALOS-2/PALSAR-2 | |
| Burnett | Environmental Remote Sensing with Unmanned Aircraft Systems |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20210225 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20211119 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20211207 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20220112 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20220510 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20220516 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:7075787 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 |