JP2016095673A - Vehicle information guide system, vehicle information guide method, and computer program - Google Patents
Vehicle information guide system, vehicle information guide method, and computer programDownload PDFInfo
- Publication number
- JP2016095673A JP2016095673AJP2014231274AJP2014231274AJP2016095673AJP 2016095673 AJP2016095673 AJP 2016095673AJP 2014231274 AJP2014231274 AJP 2014231274AJP 2014231274 AJP2014231274 AJP 2014231274AJP 2016095673 AJP2016095673 AJP 2016095673A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- information
- parking lot
- parked
- position information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Instructional Devices (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
Translated fromJapanese本発明は、駐車場において他車両に関する案内を行う車両情報案内システム、車両情報案内方法及びコンピュータプログラムに関する。 The present invention relates to a vehicle information guidance system, a vehicle information guidance method, and a computer program that provide guidance for other vehicles in a parking lot.
従来、車両において乗員に提供する情報は、車速やエンジン回転数等のごく限られた情報であった。しかしながら、近年、車載器の機能の向上に伴い車両において乗員に提供する情報が増加してり、例えば、目的地までの案内経路、渋滞情報、店舗等の施設情報等の提供が行われる。また、特に車両が目的地に接近したり到着した際には、車両を駐車する為に必要な情報として駐車場に関する情報を案内することについても行われていた。 Conventionally, information provided to passengers in a vehicle has been limited information such as vehicle speed and engine speed. However, in recent years, information provided to passengers in a vehicle has increased as the functions of the vehicle-mounted device have been improved, and for example, guidance routes to destinations, traffic jam information, facility information such as stores, and the like are provided. In addition, when a vehicle approaches or arrives at a destination, information related to a parking lot is provided as information necessary for parking the vehicle.
例えば特開2013−186638号公報には、車両が駐車場内に設置された路側機に近づいた場合に、駐車場の駐車スペースや通路を示した駐車場マップを路側機から受信し、ディスプレイに表示する技術について提案されている。 For example, in Japanese Patent Application Laid-Open No. 2013-186638, when a vehicle approaches a roadside machine installed in a parking lot, a parking lot map showing a parking space and a passage of the parking lot is received from the roadside machine and displayed on a display. The technology to be proposed is proposed.
しかしながら、上記特許文献1の発明では、ユーザは駐車場がどのような構造を有するかについては把握することが可能となるが、駐車場内に位置する他車両に関する情報を取得することはできなかった。ここで、駐車場内の駐車スペースに停車する車両の中には、エンジンなどの駆動源が駆動した状態で停車している車両がある。このような車両は、例えば今から走行を開始しようとしている車両、駐車直後の車両、同乗者を待っている車両等であり、乗員がシフトレバー操作やアクセル操作を行えば直ぐに走行を開始できる状態にある。 However, in the invention of the above-mentioned
一方で、駐車場内を走行する車両内にいるユーザからは、駐車スペースで停車する他車両のエンジン音が聞こえない場合が多い。従って、駐車スペースに駐車している他車両についてエンジンが駆動している状態にあるか否かを判断することは難しい。その結果、十分な注意を払わずにエンジンが駆動状態にある停車車両に接近した結果、両者が互いの意図に反して接近する危険性が生じる。 On the other hand, it is often the case that the user who is in the vehicle traveling in the parking lot cannot hear the engine sound of the other vehicle that stops in the parking space. Therefore, it is difficult to determine whether or not the engine is driving for another vehicle parked in the parking space. As a result, as a result of approaching a stopped vehicle in which the engine is in a driving state without paying sufficient attention, there is a risk that both may approach against each other's intention.
本発明は前記従来における問題点を解消するためになされたものであり、駐車場内において停車状態で且つ駆動源が駆動状態にある他車両の位置を案内することによって、ユーザに該他車両への注意を適切に払わせることを可能とした車両情報案内システム、車両情報案内方法及びコンピュータプログラムを提供することを目的とする。 The present invention has been made in order to solve the above-described conventional problems, and by guiding the position of another vehicle in a parking lot where the vehicle is stopped and the drive source is in a drive state, the user is directed to the other vehicle. An object of the present invention is to provide a vehicle information guidance system, a vehicle information guidance method, and a computer program capable of appropriately paying attention.
前記目的を達成するため本発明に係る車両情報案内システムは、自車両が駐車場内に位置する場合に、前記駐車場内において停車状態で且つ駆動源が駆動状態にある他車両の位置情報を取得する位置情報取得手段と、前記位置情報取得手段により取得した前記他車両の位置情報に基づいて、前記他車両の位置を特定する他車位置特定手段と、前記他車位置特定手段によって特定された前記他車両の位置を案内する他車案内手段と、を有することを特徴とする。
尚、「駆動源」とは、車両を駆動させる動力源であり、例えばガソリンエンジン、ディーゼルエンジン、モータ等が該当する。In order to achieve the above object, the vehicle information guidance system according to the present invention obtains position information of other vehicles that are stopped in the parking lot and the drive source is in a driving state when the host vehicle is located in the parking lot. Based on position information acquisition means, position information of the other vehicle acquired by the position information acquisition means, other vehicle position specifying means for specifying the position of the other vehicle, and the other vehicle position specifying means specified by the other vehicle position specifying means And other vehicle guide means for guiding the position of the other vehicle.
The “drive source” is a power source that drives the vehicle, and corresponds to, for example, a gasoline engine, a diesel engine, a motor, or the like.
また、本発明に係る車両情報案内方法は、位置情報取得手段が、自車両が駐車場内に位置する場合に、前記駐車場内において停車状態で且つ駆動源が駆動状態にある他車両の位置情報を取得するステップと、他車位置特定手段が、前記位置情報取得手段により取得した前記他車両の位置情報に基づいて、前記他車両の位置を特定するステップと、他車案内手段が、前記他車位置特定手段によって特定された前記他車両の位置を案内するステップと、を有することを特徴とする。 In the vehicle information guidance method according to the present invention, when the position information acquisition unit is located in the parking lot, the position information acquisition unit obtains the position information of the other vehicle that is stopped in the parking lot and the drive source is in the driving state. A step of acquiring, a step of specifying the position of the other vehicle based on the position information of the other vehicle acquired by the position information acquiring unit, and a step of guiding the other vehicle, And guiding the position of the other vehicle specified by the position specifying means.
また、本発明に係るコンピュータプログラムは、コンピュータを、自車両が駐車場内に位置する場合に、前記駐車場内において停車状態で且つ駆動源が駆動状態にある他車両の位置情報を取得する位置情報取得手段と、前記位置情報取得手段により取得した前記他車両の位置情報に基づいて、前記他車両の位置を特定する他車位置特定手段と、前記他車位置特定手段によって特定された前記他車両の位置を案内する他車案内手段と、して機能させることを特徴とする。 Further, the computer program according to the present invention obtains position information for acquiring position information of another vehicle in which the computer is stopped in the parking lot and the drive source is in the driving state when the host vehicle is located in the parking lot. And other vehicle position specifying means for specifying the position of the other vehicle based on the position information of the other vehicle acquired by the position information acquisition means, and the other vehicle position specified by the other vehicle position specifying means. It functions as other vehicle guidance means for guiding the position.
前記構成を有する本発明に係る車両情報案内システム、車両情報案内方法及びコンピュータプログラムによれば、駐車場内において停車状態で且つ駆動源が駆動状態にある他車両の位置を案内することによって、駐車場内を走行する際にユーザが注意を払うべき他車両をユーザに認識させることが可能となる。その結果、他車両が急に走行を開始しても他車両と不用意に接近することが無く、駐車場内の移動をスムーズ且つ適切に行わせることが可能となる。 According to the vehicle information guidance system, the vehicle information guidance method, and the computer program according to the present invention having the above-described configuration, by guiding the position of another vehicle that is stopped in the parking lot and the drive source is in the driving state, It is possible to make the user recognize other vehicles that the user should pay attention to when traveling. As a result, even if the other vehicle suddenly starts traveling, the vehicle does not inadvertently approach the other vehicle, and the movement in the parking lot can be performed smoothly and appropriately.
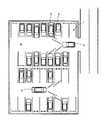
以下、本発明に係る車両情報案内システム1を具体化した一実施形態に基づき図面を参照しつつ詳細に説明する。先ず、本実施形態に係る車両情報案内システム1の概略構成について図1を用いて説明する。図1は本実施形態に係る車両情報案内システム1の概略構成図である。 Hereinafter, based on one embodiment which materialized vehicle
図1に示すように、本実施形態に係る車両情報案内システム1は、駐車場2内に位置する複数の車両3によって構成され、各車両に設置された通信モジュール等の通信装置によって複数の車両3の間で相互に情報通信が可能となっている。尚、車両3の間で直接通信を行うのではなく、外部のサーバ(図示せず)を介して通信を行うように構成しても良い。 As shown in FIG. 1, a vehicle
ここで、車両3に設置された通信モジュールは、例えばミリ波帯の電波による無線方式で情報を通信する通信装置である。そして、自車両位置に対して予め定められた無線通信可能範囲(例えば、自車両位置を中心とした半径1kmまでの範囲)に位置する他車両との間で、無線による情報の通信を行うことが可能となっている。そして、本実施形態では特に、駐車場内で駐車中の車両から駐車場内を移動中の車両へと、駐車中の車両の現在位置を特定する情報が送信される。 Here, the communication module installed in the
また、各車両3には後述のナビゲーション装置5が設置されている。そして、ナビゲーション装置5は、自車両の現在位置を検出したり、他車両から受信した上記現在位置を特定する情報に基づいて他車両の位置を特定する為の案内を行う。 Each
次に、上記車両情報案内システム1を構成する各車両3に設置されたナビゲーション装置5の概略構成について図2を用いて説明する。図2は本実施形態に係るナビゲーション装置5を示したブロック図である。 Next, a schematic configuration of the
図2に示すように本実施形態に係るナビゲーション装置5は、ナビゲーション装置5が搭載された車両の現在位置を検出する現在位置検出部11と、各種のデータが記録されたデータ記録部12と、入力された情報に基づいて、各種の演算処理を行うナビゲーションECU13と、ユーザからの操作を受け付ける操作部14と、ユーザに対して車両周辺の地図や施設の関する施設情報を表示する液晶ディスプレイ15と、経路案内に関する音声ガイダンスを出力するスピーカ16と、記憶媒体であるDVDを読み取るDVDドライブ17と、他車両やVICS(登録商標:Vehicle Information and Communication System)センタ等の情報センタとの間で通信を行う通信モジュール18と、から構成されている。また、ナビゲーション装置5はCAN等の車載ネットワークを介して、フロントカメラ19やヘッドアップディスプレイ装置(以下、HUDという)20が接続されている。 As shown in FIG. 2, the
以下に、ナビゲーション装置5を構成する各構成要素について順に説明する。
現在位置検出部11は、GPS21、車速センサ22、ステアリングセンサ23、ジャイロセンサ24等からなり、現在の車両の位置、方位、車両の走行速度、現在時刻等を検出することが可能となっている。ここで、特に車速センサ22は、車両の移動距離や車速を検出する為のセンサであり、車両の駆動輪の回転に応じてパルスを発生させ、パルス信号をナビゲーションECU13に出力する。そして、ナビゲーションECU13は発生するパルスを計数することにより駆動輪の回転速度や移動距離を算出する。尚、上記4種類のセンサをナビゲーション装置5が全て備える必要はなく、これらの内の1又は複数種類のセンサのみをナビゲーション装置5が備える構成としても良い。Below, each component which comprises the
The current
また、データ記録部12は、外部記憶装置及び記録媒体としてのハードディスク(図示せず)と、ハードディスクに記録された地図情報DB31や画像DB32や所定のプログラム等を読み出すとともにハードディスクに所定のデータを書き込む為のドライバである記録ヘッド(図示せず)とを備えている。尚、データ記録部12をハードディスクの代わりにフラッシュメモリやメモリーカードやCDやDVD等の光ディスクにより構成しても良い。また、地図情報DB31や画像DB32は外部のサーバに格納させ、ナビゲーション装置5が通信により取得する構成としても良い。 The
ここで、地図情報DB31は、例えば、道路(リンク)に関するリンクデータ33、ノード点に関するノードデータ34、施設等の地点に関する地点データ35、各交差点に関する交差点データ、地図を表示するための地図表示データ、経路を探索するための探索データ、地点を検索するための検索データ等が記憶された記憶手段である。 Here, the
ここで、リンクデータ33としては、例えば、該リンクを識別するリンクID、該リンクの端部に位置するノードを特定する端部ノード情報、該リンクが構成する道路の道路種別等が記憶される。また、ノードデータ34としては、該ノードを識別するノードID、該ノードの位置座標、該ノードがリンクを介して接続される接続先ノードを特定する接続先ノード情報等が記憶される。また、地点データ35としては、目的地への設定対象となる施設に関する各種情報が記憶される。例えば、施設を特定するID、施設名称、位置座標、ジャンル、住所等が記憶される。特に本実施形態では地点データ35として、駐車場の構造を特定する情報である駐車場情報37についても記憶される。ここで、駐車場情報37としては、全国各地にある駐車場について、駐車場の全体形状、駐車場内の駐車スペースの配置、駐車場内を車両が移動する為の通路の形状、通路に規定された進行方向区分等が記憶される。尚、駐車場情報37は、予め地図情報DB31に記憶する構成としても良いし、外部のサーバから取得する構成としても良い。また、車両が駐車場に接近又は進入した際に、該駐車場の駐車場情報37を外部サーバから取得する構成としても良い。 Here, as the
また、画像DB32は、車両に搭載されたフロントカメラ19で撮像された撮像画像が累積的に記憶される記憶手段である。ここで、フロントカメラ19は、車両が駐車場内に位置する間において車両周辺の撮像を継続して行う。特に後述のように車両が駐車スペースでエンジンが駆動状態で停車している場合には、正面に位置する他の駐車車両を撮像する。一方で、車両が駐車場内を移動中の場合には、進行方向前方に位置する駐車車両を撮像する。そして、ナビゲーションECU13は撮像された撮像画像に対して画像処理を行うことにより、駐車車両の特徴を抽出する等の各種処理を実行する。 The
一方、ナビゲーションECU(エレクトロニック・コントロール・ユニット)13は、ナビゲーション装置5の全体の制御を行う電子制御ユニットであり、演算装置及び制御装置としてのCPU41、並びにCPU41が各種の演算処理を行うにあたってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ等が記憶されるRAM42、制御用のプログラムのほか、後述の駐車情報特定処理プログラム(図3)や他車両案内処理プログラム(図5)等が記録されたROM43、ROM43から読み出したプログラムを記憶するフラッシュメモリ44等の内部記憶装置を備えている。尚、ナビゲーションECU13は、処理アルゴリズムとしての各種手段を構成する。例えば、位置情報取得手段は、自車両が駐車場内に位置する場合に、駐車場内において停車状態で且つ駆動源が駆動状態にある他車両の位置情報を取得する。他車位置特定手段は、位置情報取得手段により取得した他車両の位置情報に基づいて、他車両の位置を特定する。他車案内手段は、他車位置特定手段によって特定された他車両の位置を案内する。 On the other hand, the navigation ECU (Electronic Control Unit) 13 is an electronic control unit that controls the
操作部14は、走行開始地点としての出発地及び走行終了地点としての目的地を入力する際等に操作され、各種のキー、ボタン等の複数の操作スイッチ(図示せず)から構成される。そして、ナビゲーションECU13は、各スイッチの押下等により出力されるスイッチ信号に基づき、対応する各種の動作を実行すべく制御を行う。尚、操作部14は液晶ディスプレイ15の前面に設けたタッチパネルによって構成することもできる。また、マイクと音声認識装置によって構成することもできる。 The
また、液晶ディスプレイ15には、道路を含む地図画像、交通情報、操作案内、操作メニュー、キーの案内、出発地から目的地までの案内経路、案内経路に沿った案内情報、ニュース、天気予報、時刻、メール、テレビ番組等が表示される。 The
また、スピーカ16は、ナビゲーションECU13からの指示に基づいて案内経路に沿った走行を案内する音声ガイダンスや、交通情報の案内を出力する。 The
また、DVDドライブ17は、DVDやCD等の記録媒体に記録されたデータを読み取り可能なドライブである。そして、読み取ったデータに基づいて音楽や映像の再生、地図情報DB31の更新等が行われる。尚、DVDドライブ17に替えてメモリーカードを読み書きする為のカードスロットを設けても良い。 The
また、通信モジュール18は、所定距離以内に位置する他車両との間で車車間通信を行ったり、交通情報センタ、例えば、VICSセンタやプローブセンタ等から送信された渋滞情報、規制情報、交通事故情報等の各情報から成る交通情報を受信する為の通信装置であり、例えば携帯電話機やDCMが該当する。 In addition, the
また、フロントカメラ19は、例えばCCD等の固体撮像素子を用いたカメラにより構成され、車両3のルームミラーの裏側やフロントバンパの上方等に取り付けられるとともに光軸方向を車両3の進行方向前方に向けて設置される。そして、フロントカメラ19は、車両が駐車場内に位置する間において車両前方環境の撮像を継続して行う。そして、撮像された撮像画像は画像DB32に累積的に記憶される。尚、フロントカメラ19以外に車両の後方や側方にカメラを配置するように構成しても良い。 The
また、HUD20は、車両3のダッシュボード内部に設置されており、内部にプロジェクタやプロジェクタからの映像が投射されるスクリーン等を有する。そして、スクリーンに投射された映像を、運転席の前方のフロントウィンドウに反射させて車両3の乗員に視認させるように構成されている。そして、フロントウィンドウを反射して乗員がスクリーンに投射された映像を視認した場合に、乗員にはフロントウィンドウの位置ではなく、フロントウィンドウの先の遠方の位置にスクリーンに投射された映像が虚像として視認される。即ち、車両の乗員は、フロントガラスを介して視認できる周辺環境に重畳して虚像が視認されることとなる。尚、本実施形態ではHUD20によって生成する虚像は、特に駐車場内において停車状態で且つエンジンが駆動状態にある他車両の位置を特定する情報とする。 The
続いて、前記構成を有するナビゲーション装置5において実行する駐車情報特定処理プログラムについて図3に基づき説明する。図3は本実施形態に係る駐車情報特定処理プログラムのフローチャートである。ここで、駐車情報特定処理プログラムは車両のACC電源がオンされた後に実行され、駐車場内において停車状態で且つエンジンが駆動状態にある場合に、自車両の現在位置を特定する情報を抽出して他車両へと送信するプログラムである。尚、以下の図3や図5にフローチャートで示されるプログラムは、ナビゲーション装置5が備えているRAM42やROM43に記憶されており、CPU41により実行される。 Next, a parking information specifying process program executed in the
先ず、駐車情報特定処理プログラムでは、ステップ(以下、Sと略記する)1において、CPU41は自車両がいずれかの駐車場内に位置するか否か判定する。尚、自車両が駐車場内に位置するか否かは、例えば現在位置検出部11により検出した自車両の現在位置と地図情報DB31(特に駐車場情報37)に基づいて判定しても良いし、フロントカメラ19により撮像した撮像画像に基づいて判定しても良い。また、撮像画像に基づいて判定する場合には、例えば撮像画像に対して所定の画像認識を行い、撮像画像内に自車両が駐車場へ進入することを示す特徴物(例えば、駐車場のゲート、駐車券の発券機、駐車料金の清算機、駐車場の看板等)が含まれている場合に、自車両が駐車場内へ進入したと判定する。 First, in the parking information identification processing program, in step (hereinafter abbreviated as S) 1, the
そして、自車両が駐車場内に位置すると判定された場合(S1:YES)には、S2へと移行する。それに対して、自車両が駐車場内に位置しないと判定された場合(S1:NO)には、当該駐車情報特定処理プログラムを終了する。 And when it determines with the own vehicle being located in a parking lot (S1: YES), it transfers to S2. On the other hand, when it is determined that the host vehicle is not located in the parking lot (S1: NO), the parking information specifying process program is terminated.
S2においてCPU41は、自車両のエンジンが駆動中であるか否か判定する。尚、自車両のエンジンの駆動状態については、車両の制御を行う車両ECU等からCAN等を介して取得する。 In S2, the
そして、自車両のエンジンが駆動中であると判定された場合(S2:YES)には、S3へと移行する。それに対して、自車両のエンジンが駆動中でないと判定された場合(S2:NO)には、当該駐車情報特定処理プログラムを終了する。 And when it determines with the engine of the own vehicle driving (S2: YES), it transfers to S3. On the other hand, when it is determined that the engine of the host vehicle is not being driven (S2: NO), the parking information specifying process program is terminated.
S3においてCPU41は、自車両が停車状態にあるか否か判定する。尚、自車両が停車状態にあるか否かについては、車速センサ22の検出結果に基づいて判定する。尚、車速センサ22以外に、シフト位置やサイドブレーキの作動状態によって車両が停車状態にあるか否かを判定しても良い。 In S3, the
そして、自車両が停車状態にあると判定された場合(S3:YES)には、S4へと移行する。それに対して、自車両が停車状態にない、即ち駐車場内を移動中であると判定された場合(S3:NO)には、当該駐車情報特定処理プログラムを終了する。 And when it determines with the own vehicle being in a stop state (S3: YES), it transfers to S4. On the other hand, when it is determined that the host vehicle is not stopped, that is, is moving within the parking lot (S3: NO), the parking information specifying process program is terminated.
次に、S4においてCPU41は、自車両の現在位置を現在位置検出部11の検出結果に基づいて取得する。具体的には、自車両の位置座標(緯度経度)を特定する。更に、車両の現在位置は、高精度ロケーション技術を用いて詳細に特定することが望ましい。ここで、高精度ロケーション技術とは、車両後方のカメラから取り込んだ白線や路面ペイント情報を画像認識により検出し、更に、白線や路面ペイント情報を予め記憶した地図情報DBと照合することにより、走行車線や高精度な車両位置を検出可能にする技術である。尚、高精度ロケーション技術の詳細については既に公知であるので省略する。 Next, in S <b> 4, the
続いて、S5においてCPU41は、直近にフロントカメラ19により撮像された撮像画像を取得する。尚、フロントカメラ19により撮像された画像には、自車両と通路を挟んで対向する駐車スペースに駐車された駐車車両が撮像されることとなる。例えば、図4に示すように駐車場内に複数の車両が駐車している状態で、停車状態で且つエンジンが駆動状態にある車両51のフロントカメラ19で撮像された撮像画像には、通路52を挟んで車両51に対向する駐車スペースに駐車された3台の駐車車両53〜55が撮像されることとなる。尚、撮像される撮像画像中に含まれる駐車車両の数は3台に限られず、駐車スペースの空き状況、通路の幅、フロントカメラ19の画角等によって異なる。但し、少なくとも複数台の駐車車両が撮像されるようにフロントカメラ19の画角を設計することが望ましい。尚、自車両が駐車スペースに対して前進して駐車する前向き駐車を行っている場合には、フロントカメラ19でなく自車両の後方に別途設置されたバックカメラにより撮像された撮像画像を取得するように構成するのが望ましい。 Subsequently, in S <b> 5, the
次に、S6においてCPU41は、前記S5で取得した撮像画像に対して画像認識処理を行うことにより、撮像画像中に含まれる駐車車両の特徴を抽出する。尚、本実施形態では特に撮像画像中に含まれる駐車車両の特徴として“色”と“車種”を特定し、抽出する構成とする。また、“車種”の特定については例えば画像認識用のテンプレートを車種毎に予め用意し、撮像画像と読み出したテンプレートとに基づいて、撮像画像に対してテンプレートマッチングによる画像認識処理を実行し、撮像画像中に含まれる車両の画像とテンプレートとの一致率を算出して特定する。尚、撮像画像中に駐車車両が多数含まれる場合には、自車両の正面に位置する駐車車両(図4の駐車車両54)と、その駐車車両の左右に位置する駐車車両(図4の駐車車両53、55)については少なくとも特徴を抽出するように構成する。 Next, in S6, the
その後、S7においてCPU41は、前記S4で取得された自車両の現在位置を特定する座標と、前記S6の画像認識処理によって抽出された駐車車両の特徴とを関連付けて他車両へと送信する。尚、前記S7の情報の送信は、車車間通信により行っても良いし、外部のサーバを介して行っても良い。また、通信可能範囲内にいる全ての他車両に対して送信する構成としても良いし、自車両と同一駐車場内にいる他車両のみを対象として送信する構成としても良いし、自車両と同一駐車場内にあって且つ走行状態にある他車両のみを対象として送信する構成としても良い。その後、情報を受信した他車両では、後述のように情報の送信元となる自車両(即ち停車状態で且つエンジンが駆動状態にある車両)の位置を特定する為の案内が行われる。詳細については後述する。 Thereafter, in S7, the
次に、ナビゲーション装置5において実行する他車両案内処理プログラムについて図5に基づき説明する。図5は本実施形態に係る他車両案内処理プログラムのフローチャートである。ここで、他車両案内処理プログラムは車両のACC電源がオンされた後に実行され、駐車場内において停車状態で且つエンジンが駆動状態にある他車両の位置を特定する為の案内を行うプログラムである。 Next, another vehicle guidance processing program executed in the
先ず、他車両案内処理プログラムでは、S11においてCPU41は、他車両から現在位置を特定する情報を受信したか否か判定する。尚、現在位置を特定する情報は、前記S7において駐車場内において停車状態で且つエンジンが駆動状態にある他車両(以下、待機駐車車両という)から送信される。具体的には、待機駐車車両の現在位置を特定する座標と、前記S6の画像認識処理によって抽出された待機駐車車両の周囲に位置する駐車車両の特徴とを関連付けた情報である。 First, in the other vehicle guidance processing program, in S11, the
そして、待機駐車車両から現在位置を特定する情報を受信したと判定された場合(S11:YES)には、S12へと移行する。それに対して、待機駐車車両から現在位置を特定する情報を受信していないと判定された場合(S11:NO)には、当該他車両案内処理プログラムを終了する。 And when it determines with having received the information which pinpoints the present position from a waiting | standby parked vehicle (S11: YES), it transfers to S12. On the other hand, when it determines with not having received the information which pinpoints the present position from a standby parking vehicle (S11: NO), the said other vehicle guidance process program is complete | finished.
S12においてCPU41は、自車両が待機駐車車両と同じ駐車場内に位置するか否か判定する。尚、自車両が待機駐車車両と同じ駐車場内に位置するか否かは、例えば待機駐車車両から受信した待機駐車車両の現在位置を特定する情報と現在位置検出部11により検出した自車両の現在位置と地図情報DB31(特に駐車場情報37)に基づいて判定する。 In S12, the
そして、自車両が待機駐車車両と同じ駐車場内に位置すると判定された場合(S12:YES)には、S13へと移行する。それに対して、自車両が待機駐車車両と同じ駐車場内に位置しないと判定された場合(S12:NO)には、当該他車両案内処理プログラムを終了する。 And when it determines with the own vehicle being located in the same parking lot as a standby parking vehicle (S12: YES), it transfers to S13. On the other hand, when it is determined that the host vehicle is not located in the same parking lot as the standby parked vehicle (S12: NO), the other vehicle guidance processing program is terminated.
S13においてCPU41は、自車両が走行状態にあるか否か判定する。尚、自車両が走行状態にあるか否かについては、車速センサ22の検出結果に基づいて判定する。尚、車速センサ22以外に、シフト位置やサイドブレーキの作動状態によって車両が走行状態にあるか否かを判定しても良い。 In S13, the
そして、自車両が走行状態にあると判定された場合(S13:YES)には、S14へと移行する。それに対して、自車両が走行状態にない、即ち駐車場内で駐車中であると判定された場合(S13:NO)には、当該他車両案内処理プログラムを終了する。 If it is determined that the host vehicle is in the running state (S13: YES), the process proceeds to S14. On the other hand, when it is determined that the host vehicle is not in the traveling state, that is, is parked in the parking lot (S13: NO), the other vehicle guidance processing program is terminated.
次に、S14においてCPU41は、自車両の現在位置を現在位置検出部11の検出結果に基づいて取得する。具体的には、自車両の位置座標(緯度経度)を特定する。更に、車両の現在位置は、高精度ロケーション技術を用いて詳細に特定することが望ましい。ここで、高精度ロケーション技術とは、車両後方のカメラから取り込んだ白線や路面ペイント情報を画像認識により検出し、更に、白線や路面ペイント情報を予め記憶した地図情報DBと照合することにより、走行車線や高精度な車両位置を検出可能にする技術である。尚、高精度ロケーション技術の詳細については既に公知であるので省略する。 Next, in S <b> 14, the
その後、S15においてCPU41は、待機駐車車両から受信した待機駐車車両の現在位置を特定する座標と、前記S14で取得した自車両の現在位置を特定する座標との位置関係から、自車両に対する待機駐車車両の相対位置を推定する。尚、自車位置の検出精度を考慮して、点ではなく一定の範囲(例えば半径10mの円)で待機駐車車両の相対位置を推定する。 Thereafter, in S15, the
続いて、S16においてCPU41は、直近にフロントカメラ19により撮像された撮像画像を取得する。尚、フロントカメラ19により撮像された画像には、自車両の進行方向前方に位置する駐車スペースに駐車された駐車車両が撮像されることとなる。例えば、図6に示すように駐車場内に複数の車両が駐車している状態で、通路52を走行する車両56のフロントカメラ19で撮像された撮像画像には、通路52に沿って設置された駐車スペースに駐車された計7台の駐車車両57〜63が撮像されることとなる。 Subsequently, in S <b> 16, the
次に、S17においてCPU41は、前記S16で取得した撮像画像に対して画像認識処理を行うことにより、撮像画像中に含まれる駐車車両の特徴を抽出する。尚、特徴を抽出する駐車車両の範囲は、前記S15で推定された範囲内及びその周辺(例えば5m以内)に位置する駐車車両とする。そして、撮像画像から抽出した駐車車両の特徴と待機駐車車両から受信した駐車車両の特徴とを比較し、撮像画像中に含まれる駐車車両の内、待機駐車車両から受信した駐車車両の特徴と一致する駐車車両の位置を特定する。尚、本実施形態では一致判定基準となる駐車車両の特徴は“色”及び“車種”となる。また、車種の一致判定は、例えば相関ベースマッチングや特徴点を抽出して比較するパターンマッチング等を用いる。 Next, in S17, the
ここで、本実施形態では前記したように待機駐車車両から、待機駐車車両と通路を挟んで対向する駐車スペースに駐車された複数台の駐車車両の特徴を受信するように構成されている。従って、前記S17においてCPU41は、駐車車両1台単位で特徴が一致するか否かを判定するのではなく、複数台単位で行う。即ち、受信した複数台の駐車車両の特徴と並びが一致する駐車車両の並び位置を特定することとなる。例えば、図4に示すように待機駐車車両51が、待機駐車車両51の正面に位置する駐車車両54と、その駐車車両の左右に位置する駐車車両53、55の特徴を抽出して送信した場合には、駐車車両53〜55と特徴及び並びが一致する駐車車両の並び位置を特定することとなる。 Here, in this embodiment, as described above, it is configured to receive the characteristics of a plurality of parked vehicles parked in a parking space facing the parked standby vehicle across the passage with the parked vehicle. Therefore, in S17, the
その後、S18においてCPU41は、前記S17において待機駐車車両から受信した駐車車両の特徴と一致すると特定された駐車車両の位置と、待機駐車車両と該駐車車両との位置関係とに基づいて、待機駐車車両の位置を特定する。具体的には、図4に示すように待機駐車車両51が、待機駐車車両51の正面に位置する駐車車両54と、その駐車車両の左右に位置する駐車車両53、55の特徴を抽出して送信する構成とすると、前記S17で特徴が一致すると特定された3台の駐車車両の内、中央に位置する駐車車両と通路を挟んで対向する位置に駐車されている車両が待機駐車車両として特定されることとなる。尚、待機駐車車両と駐車車両との位置関係は、固定(例えば、特徴が一致すると特定された複数台の駐車車両の内、中央の駐車車両と待機駐車車両が通路を挟んで対向して位置する)としても良いし、前記S7において待機駐車車両から駐車車両の特徴ととともに送信する構成としても良い。 After that, in S18, the
その後、S19においてCPU41は、前記S18で特定された待機駐車車両の位置を特定する為の案内を行う。具体的には、HUD20を用いてマークや文字等の待機駐車車両の位置を特定する虚像や、待機駐車車両の存在を警告する虚像を生成することにより行う。また、虚像を生成する位置は、ユーザがフロントガラスを介して前方環境を視認した際に、前方環境中の待機駐車車両と重畳する位置又は待機駐車車両の周辺に生成するのが望ましい。 Thereafter, in S19, the
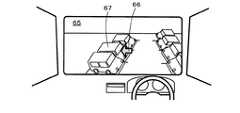
ここで、図7はHUD20を用いた待機駐車車両の案内例を示した図である。
図7に示すように、フロントウィンドウ65の前方に、虚像66として待機駐車車両67の位置を特定するマークを生成する。尚、図7に示す例ではマークを矢印形状としているがマークの形状は適宜変更可能である。更に、「注意」などの文字を虚像66として生成しても良い。また、虚像66を生成する位置は図7に示すように待機駐車車両67と重複させても良いし、待機駐車車両67の前方や上方に生成しても良い。また、ユーザから虚像66までの距離は、ユーザから待機駐車車両67までの距離と一致させるのが望ましい。その結果、ユーザが前方環境を視認した際に、待機駐車車両67が存在する位置に虚像66が生成されることとなり、待機駐車車両67の位置を正確に特定することが可能となる。また、その後に自車両が移動してユーザから待機駐車車両67までの距離が変化した際には、それに伴ってユーザから虚像66までの距離も変化するように構成するのが望ましい。Here, FIG. 7 is a diagram showing an example of guidance of a standby parked vehicle using the
As shown in FIG. 7, a mark for specifying the position of the standby parked
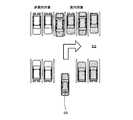
また、本実施形態では、自車両の現在位置と地図情報DB31に記憶された駐車場情報37から駐車場内における自車両の走行経路を取得し、自車両の走行経路に沿って設置された駐車スペースに位置する待機駐車車両を対象として前記S18の案内を行う。例えば、図8に示すように駐車場内の通路52が車両56の進行方向においてT字路になっており、右折方向に進行方向が区分されている場合には、T字路を右折する経路が車両56の走行経路となる。従って、T字路に対して左側の駐車スペースに駐車する車両については案内対象とならず、T字路に対して右側の駐車スペースに駐車する車両のみが案内対象となる。 Moreover, in this embodiment, the driving | running route of the own vehicle in a parking lot is acquired from the present location of the own vehicle and the parking lot information 37 memorize | stored in map information DB31, and the parking space installed along the driving route of the own vehicle Guidance of the above-mentioned S18 is performed for the waiting parked vehicle located in the area. For example, as shown in FIG. 8, when the
以上詳細に説明した通り、本実施形態に係る車両情報案内システム1、車両情報案内システム1による車両情報案内方法及び車両情報案内システム1において実行されるコンピュータプログラムでは、自車両が駐車場内に位置する場合に、同じ駐車場内において停車状態で且つエンジンが駆動状態にある他車両である待機駐車車両の位置情報を通信によって取得し、取得した待機駐車車両の位置情報やフロントカメラ19の画像認識結果に基づいて待機駐車車両の位置を特定し(S18)、特定された待機駐車車両の位置を案内する(S19)ので、駐車場内を走行する際にユーザが注意を払うべき他車両をユーザに認識させることが可能となる。その結果、待機駐車車両が急に走行を開始しても待機駐車車両と不用意に接近することが無く、駐車場内の移動をスムーズ且つ適切に行わせることが可能となる。 As explained in detail above, in the vehicle
尚、本発明は前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、本実施形態では、車車間通信により同じ駐車場内において停車状態で且つエンジンが駆動状態にある待機駐車車両の位置情報を取得する構成としているが、外部のサーバを介して取得する構成としても良い。その場合には、駐車情報特定処理プログラム(図3)や他車両案内処理プログラム(図5)の一部をサーバが実行する構成としても良い。Note that the present invention is not limited to the above-described embodiment, and various improvements and modifications can be made without departing from the scope of the present invention.
For example, in the present embodiment, the configuration is such that the position information of a parked vehicle that is parked and the engine is in a driving state is acquired in the same parking lot by inter-vehicle communication, but may be acquired via an external server. good. In that case, it is good also as a structure which a server performs a part of parking information specific process program (FIG. 3) and another vehicle guidance process program (FIG. 5).
また、本実施形態では、HUD20を用いて待機駐車車両の位置を特定する情報を案内する構成としているが、案内手段としてはHUD20以外の手段を用いても良い。例えば、液晶ディスプレイ15にフロントカメラ19で現在撮像している撮像画像を表示し、表示されている撮像画像に対して待機駐車車両の位置を特定するマークや文字等を重畳して表示するように構成しても良い。 Moreover, in this embodiment, although it is set as the structure which guides the information which pinpoints the position of a waiting | standby parked vehicle using HUD20, you may use means other than HUD20 as a guidance means. For example, a captured image currently captured by the
また、本実施形態では、案内対象となる待機駐車車両を停車状態で且つエンジンが駆動状態にある車両として定義しているが、例えばハイブリッド車両、電気自動車、燃料電池自動車等のエンジン以外の駆動源(例えばモータ)を搭載する車両に対しては、各車両に対応する駆動源が駆動状態にある車両を待機駐車車両として定義する。 In the present embodiment, the standby parked vehicle to be guided is defined as a vehicle that is stopped and the engine is in a driving state. For example, a driving source other than an engine such as a hybrid vehicle, an electric vehicle, or a fuel cell vehicle is used. For a vehicle equipped with a motor (for example, a motor), a vehicle in which a drive source corresponding to each vehicle is in a driving state is defined as a standby parked vehicle.
また、本実施形態では、前記S6において抽出対象となる駐車車両の特徴として、駐車車両の“色”と“車種”を挙げているが、“色”と“車種”以外の特徴を抽出しても良い。例えば、“全長”、“全高”、“全幅”等がある。 In the present embodiment, “color” and “vehicle type” of the parked vehicle are cited as the characteristics of the parked vehicle to be extracted in S6. However, characteristics other than “color” and “vehicle type” are extracted. Also good. For example, there are “full length”, “full height”, “full width”, and the like.
また、本実施形態では、前記S6において特徴を抽出対象とする駐車車両は、待機駐車車両の正面に位置する駐車車両と、その駐車車両の左右に位置する駐車車両の計3台としているが、抽出対象となる駐車車両の位置や台数は適宜変更することが可能となる。但し、待機駐車車両の位置を特定する精度を向上させる為に複数台を対象とするのが望ましい。 In the present embodiment, the parked vehicles whose characteristics are to be extracted in S6 are a total of three vehicles: a parked vehicle positioned in front of the standby parked vehicle and parked vehicles positioned on the left and right of the parked vehicle. The position and number of parked vehicles to be extracted can be changed as appropriate. However, it is desirable to target a plurality of vehicles in order to improve the accuracy of specifying the positions of the parked vehicles.
また、本実施形態では、駐車情報特定処理プログラム(図3)の処理を駐車場内において停車状態で且つエンジンが駆動状態にある待機駐車車両側のナビゲーション装置5が実行し、他車両案内処理プログラム(図5)の処理を駐車場内において走行状態にある車両側のナビゲーション装置5が実行する構成としているが、実行主体は適宜変更することが可能である。例えば、S6やS7の処理を駐車場内において走行状態にある車両側のナビゲーション装置5が実行する構成としても良い。 Further, in the present embodiment, the parking information specifying process program (FIG. 3) is executed by the
また、本発明は車両情報案内システム1を構成するナビゲーション装置5の代わりに、走行案内を行う機能を有する各種装置を適用することが可能である。例えば、携帯電話機やスマートフォン等の携帯端末、パーソナルコンピュータ、タブレット型端末等(以下、携帯端末等という)に適用することも可能である。但し、フロントカメラ19の撮像画像が取得できるように車載器に接続する構成とする。また、サーバと携帯端末等から構成されるシステムに対しても適用することが可能となる。その場合には、上述した駐車情報特定処理プログラム(図3)や他車両案内処理プログラム(図5)の各ステップは、サーバと携帯端末等のいずれが実施する構成としても良い。 Further, in the present invention, various devices having a function of performing travel guidance can be applied instead of the
また、本発明に係る車両情報案内システムを具体化した実施例について上記に説明したが、車両情報案内システムは以下の構成を有することも可能であり、その場合には以下の効果を奏する。 Moreover, although the embodiment which actualized the vehicle information guidance system which concerns on this invention was demonstrated above, the vehicle information guidance system can also have the following structures, and there exists the following effect in that case.
例えば、第1の構成は以下のとおりである。
自車両が駐車場内に位置する場合に、前記駐車場内において停車状態で且つ駆動源が駆動状態にある他車両の位置情報を取得する位置情報取得手段と、前記位置情報取得手段により取得した前記他車両の位置情報に基づいて、前記他車両の位置を特定する他車位置特定手段と、前記他車位置特定手段によって特定された前記他車両の位置を案内する他車案内手段と、を有することを特徴とする。
上記構成を有する車両情報案内システムによれば、駐車場内において停車状態で且つ駆動源が駆動状態にある他車両の位置を案内することによって、駐車場内を走行する際にユーザが注意を払うべき他車両をユーザに認識させることが可能となる。その結果、他車両が急に走行を開始しても他車両と不用意に接近することが無く、駐車場内の移動をスムーズ且つ適切に行わせることが可能となる。For example, the first configuration is as follows.
When the host vehicle is located in a parking lot, position information acquisition means for acquiring position information of another vehicle that is stopped in the parking lot and whose drive source is in a driving state, and the other information acquired by the position information acquisition means Other vehicle position specifying means for specifying the position of the other vehicle based on position information of the vehicle, and other vehicle guide means for guiding the position of the other vehicle specified by the other vehicle position specifying means. It is characterized by.
According to the vehicle information guidance system having the above configuration, the user should pay attention when traveling in the parking lot by guiding the position of the other vehicle that is stopped in the parking lot and the driving source is in the driving state. It becomes possible to make the user recognize the vehicle. As a result, even if the other vehicle suddenly starts traveling, the vehicle does not inadvertently approach the other vehicle, and the movement in the parking lot can be performed smoothly and appropriately.
また、第2の構成は以下のとおりである。
前記駐車場内における前記自車両の走行経路を取得する走行経路取得手段を有し、前記他車案内手段は、前記自車両の走行経路に沿って設置された駐車スペースに位置する前記他車両の位置を案内することを特徴とする。
上記構成を有する車両情報案内システムによれば、駐車場内を走行する際に車両の進行方向に存在し、特にユーザが注意を払うべき他車両をユーザに認識させることが可能となる。また、ユーザにとって影響しない他車両に関する案内については行わないことにより、制御部の処理負担を軽減することも可能となる。The second configuration is as follows.
A position of the other vehicle located in a parking space installed along the travel route of the host vehicle, the travel route acquiring unit acquiring a travel route of the host vehicle in the parking lot; It is characterized by guiding.
According to the vehicle information guidance system having the above-described configuration, it is possible to make the user recognize other vehicles that are present in the traveling direction of the vehicle when traveling in the parking lot and that the user should pay particular attention to. In addition, by not providing guidance regarding other vehicles that do not affect the user, it is possible to reduce the processing burden on the control unit.
また、第3の構成は以下のとおりである。
前記自車両の周辺環境に重畳して前記自車両の乗員に視認させる虚像を生成する虚像生成手段を有し、前記他車案内手段は、前記虚像生成手段によって生成された前記虚像によって前記他車両の位置を案内することを特徴とする。
上記構成を有する車両情報案内システムによれば、車両の乗員は案内情報である虚像を視認する際に視線移動を極力少なくすることが可能であり、運転時の負担をより少なくすることが可能となる。また、生成された虚像に基づいて他車両の位置を正確に特定することが可能なる。The third configuration is as follows.
A virtual image generating unit that generates a virtual image that is superimposed on the surrounding environment of the host vehicle and is visually recognized by a passenger of the host vehicle, wherein the other vehicle guide unit is configured to generate the virtual vehicle using the virtual image generated by the virtual image generating unit; It is characterized by guiding the position of.
According to the vehicle information guidance system having the above-described configuration, the vehicle occupant can reduce the line-of-sight movement as much as possible when visually recognizing the virtual image as the guidance information, and can further reduce the burden during driving. Become. In addition, the position of the other vehicle can be accurately specified based on the generated virtual image.
また、第4の構成は以下のとおりである。
前記他車両の周辺を撮像した撮像画像から前記他車両の周辺に位置する周辺車両の特徴を取得する車両特徴取得手段と、前記他車位置特定手段は、前記車両特徴取得手段によって取得された前記周辺車両の特徴と前記位置情報取得手段により取得した前記他車両の位置情報とに基づいて、前記他車両の位置を特定することを特徴とする。
上記構成を有する車両情報案内システムによれば、他車両の周辺に位置する周辺車両の特徴を用いることによって、駐車場内に車両が多数駐車されている状態においても案内対象となる他車両を正確に特定することが可能となる。The fourth configuration is as follows.
Vehicle feature acquisition means for acquiring features of a surrounding vehicle located around the other vehicle from a captured image obtained by imaging the periphery of the other vehicle, and the other vehicle position specifying means are acquired by the vehicle feature acquisition means. The position of the other vehicle is specified based on the characteristics of the surrounding vehicle and the position information of the other vehicle acquired by the position information acquisition unit.
According to the vehicle information guidance system having the above-described configuration, it is possible to accurately identify other vehicles to be guided even in a state where a large number of vehicles are parked in the parking lot by using the characteristics of the surrounding vehicles located around the other vehicles. It becomes possible to specify.
また、第5の構成は以下のとおりである。
前記車両特徴取得手段は、前記他車両の周辺に位置する複数台の前記周辺車両の特徴を取得することを特徴とする。
上記構成を有する車両情報案内システムによれば、特徴を取得する対象となる周辺車両の数を複数台とすることによって、同じ色や同じ車種の駐車車両が多数存在する場合であっても案内対象となる他車両をより正確に特定することが可能となる。The fifth configuration is as follows.
The vehicle feature acquisition means acquires the features of a plurality of the surrounding vehicles located around the other vehicle.
According to the vehicle information guidance system having the above-described configuration, the number of surrounding vehicles from which features are to be acquired is set to a plurality of guidance objects even when there are many parked vehicles of the same color or the same vehicle type. It becomes possible to specify the other vehicle to become more accurately.
また、第6の構成は以下のとおりである。
前記車両特徴取得手段は、前記他車両と通路を挟んで対向する駐車スペースに駐車された前記周辺車両の特徴を取得することを特徴とする。
上記構成を有する車両情報案内システムによれば、特徴を取得する対象となる周辺車両を他車両と通路を挟んで対向する駐車スペースに駐車された車両とすることによって、周辺車両と他車両との位置関係が明確となり、周辺車両の位置から他車両の位置を正確に特定することが可能となる。取得できすることが可能となる。The sixth configuration is as follows.
The vehicle feature acquisition means acquires a feature of the surrounding vehicle parked in a parking space facing the other vehicle across a passage.
According to the vehicle information guidance system having the above-described configuration, by setting the surrounding vehicle, whose characteristics are to be acquired, as a vehicle parked in a parking space facing the other vehicle across the passage, between the surrounding vehicle and the other vehicle. The positional relationship becomes clear, and the position of the other vehicle can be accurately specified from the positions of the surrounding vehicles. It can be acquired.
また、第7の構成は以下のとおりである。
前記他車両と前記周辺車両の位置関係を取得する位置関係取得手段を有し、前記他車位置特定手段は、前記自車両が備える撮像装置により撮像された撮像画像に対して画像処理を行うことによって、前記車両特徴取得手段によって取得された前記周辺車両の特徴と一致する車両を前記周辺車両として特定し、特定された前記周辺車両の位置と、前記他車両と前記周辺車両の位置関係とから前記他車両の位置を特定することを特徴とする。
上記構成を有する車両情報案内システムによれば、撮像装置により撮像された撮像画像を用いることによって、案内対象となる他車両の位置を正確に特定することが可能となる。The seventh configuration is as follows.
It has a positional relationship acquisition unit that acquires a positional relationship between the other vehicle and the surrounding vehicle, and the other vehicle position specifying unit performs image processing on a captured image captured by an imaging device included in the host vehicle. To identify a vehicle that matches the characteristics of the surrounding vehicle acquired by the vehicle feature acquisition means as the surrounding vehicle, and from the specified position of the surrounding vehicle and the positional relationship between the other vehicle and the surrounding vehicle The position of the other vehicle is specified.
According to the vehicle information guidance system having the above-described configuration, it is possible to accurately specify the position of another vehicle to be guided by using the captured image captured by the imaging device.
1 車両情報案内システム
2 駐車場
3 車両
5 ナビゲーション装置
13 ナビゲーションECU
19 フロントカメラ
20 HUD
41 CPU
42 RAM
43 ROM
51 待機駐車車両
66 虚像DESCRIPTION OF
19
41 CPU
42 RAM
43 ROM
51
Claims (9)
Translated fromJapanese前記位置情報取得手段により取得した前記他車両の位置情報に基づいて、前記他車両の位置を特定する他車位置特定手段と、
前記他車位置特定手段によって特定された前記他車両の位置を案内する他車案内手段と、を有することを特徴とする車両情報案内システム。Position information acquisition means for acquiring position information of other vehicles that are stopped in the parking lot and the driving source is in a driving state when the host vehicle is located in the parking lot;
Other vehicle position specifying means for specifying the position of the other vehicle based on the position information of the other vehicle acquired by the position information acquisition means;
Vehicle information guidance system comprising: other vehicle guidance means for guiding the position of the other vehicle identified by the other vehicle position identification means.
前記他車案内手段は、前記自車両の走行経路に沿って設置された駐車スペースに位置する前記他車両の位置を案内することを特徴とする請求項1に記載の車両情報案内システム。Having travel route acquisition means for acquiring the travel route of the host vehicle in the parking lot;
2. The vehicle information guidance system according to claim 1, wherein the other vehicle guidance means guides a position of the other vehicle located in a parking space installed along a travel route of the host vehicle.
前記他車案内手段は、前記虚像生成手段によって生成された前記虚像によって前記他車両の位置を案内することを特徴とする請求項1又は請求項2に記載の車両情報案内システム。Virtual image generating means for generating a virtual image that is superimposed on the surrounding environment of the host vehicle and visually recognized by a passenger of the host vehicle;
The vehicle information guidance system according to claim 1 or 2, wherein the other vehicle guide means guides a position of the other vehicle by the virtual image generated by the virtual image generation means.
前記他車位置特定手段は、前記車両特徴取得手段によって取得された前記周辺車両の特徴と前記位置情報取得手段により取得した前記他車両の位置情報とに基づいて、前記他車両の位置を特定することを特徴とする請求項1乃至請求項3のいずれかに記載の車両情報案内システム。Vehicle feature acquisition means for acquiring features of a surrounding vehicle located around the other vehicle from a captured image obtained by imaging the periphery of the other vehicle;
The other vehicle position specifying means specifies the position of the other vehicle based on the characteristics of the surrounding vehicle acquired by the vehicle feature acquisition means and the position information of the other vehicle acquired by the position information acquisition means. The vehicle information guidance system according to any one of claims 1 to 3, wherein
前記他車位置特定手段は、
前記自車両が備える撮像装置により撮像された撮像画像に対して画像処理を行うことによって、前記車両特徴取得手段によって取得された前記周辺車両の特徴と一致する車両を前記周辺車両として特定し、
特定された前記周辺車両の位置と、前記他車両と前記周辺車両の位置関係とから前記他車両の位置を特定することを特徴とする請求項4乃至請求項6のいずれかに記載の車両情報案内システム。A positional relationship acquisition means for acquiring a positional relationship between the other vehicle and the surrounding vehicle;
The other vehicle position specifying means includes:
By performing image processing on a captured image captured by the imaging device included in the host vehicle, a vehicle that matches the feature of the surrounding vehicle acquired by the vehicle feature acquisition unit is specified as the surrounding vehicle,
The vehicle information according to any one of claims 4 to 6, wherein the position of the other vehicle is identified from the identified position of the surrounding vehicle and the positional relationship between the other vehicle and the surrounding vehicle. Guidance system.
他車位置特定手段が、前記位置情報取得手段により取得した前記他車両の位置情報に基づいて、前記他車両の位置を特定するステップと、
他車案内手段が、前記他車位置特定手段によって特定された前記他車両の位置を案内するステップと、を有することを特徴とする車両情報案内方法。When the position information acquisition means is located in the parking lot, the position information acquisition means acquires the position information of the other vehicle that is stopped and the driving source is in the driving state in the parking lot;
A step of identifying the position of the other vehicle based on the position information of the other vehicle acquired by the position information acquiring unit;
And a vehicle information guiding method comprising: a step of guiding the position of the other vehicle specified by the other vehicle position specifying unit.
自車両が駐車場内に位置する場合に、前記駐車場内において停車状態で且つ駆動源が駆動状態にある他車両の位置情報を取得する位置情報取得手段と、
前記位置情報取得手段により取得した前記他車両の位置情報に基づいて、前記他車両の位置を特定する他車位置特定手段と、
前記他車位置特定手段によって特定された前記他車両の位置を案内する他車案内手段と、
して機能させる為のコンピュータプログラム。Computer
Position information acquisition means for acquiring position information of other vehicles that are stopped in the parking lot and the driving source is in a driving state when the host vehicle is located in the parking lot;
Other vehicle position specifying means for specifying the position of the other vehicle based on the position information of the other vehicle acquired by the position information acquisition means;
Other vehicle guide means for guiding the position of the other vehicle specified by the other vehicle position specifying means;
Computer program to make it function.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014231274AJP6435798B2 (en) | 2014-11-14 | 2014-11-14 | Vehicle information guidance system, vehicle information guidance method, and computer program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014231274AJP6435798B2 (en) | 2014-11-14 | 2014-11-14 | Vehicle information guidance system, vehicle information guidance method, and computer program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016095673Atrue JP2016095673A (en) | 2016-05-26 |
| JP6435798B2 JP6435798B2 (en) | 2018-12-12 |
Family
ID=56070337
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014231274AExpired - Fee RelatedJP6435798B2 (en) | 2014-11-14 | 2014-11-14 | Vehicle information guidance system, vehicle information guidance method, and computer program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6435798B2 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111785073A (en)* | 2020-07-07 | 2020-10-16 | 河南理工大学 | A parking lot guidance system based on human factors |
| JP2021103169A (en)* | 2017-06-01 | 2021-07-15 | テスラ,インコーポレイテッド | Technologies for vehicle positioning |
| JP2021128589A (en)* | 2020-02-14 | 2021-09-02 | 矢崎エナジーシステム株式会社 | Vehicle stop judgment notification system |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009244960A (en)* | 2008-03-28 | 2009-10-22 | Toyota Motor Corp | Parking lot management apparatus, parking lot information providing system |
| WO2009136559A1 (en)* | 2008-05-08 | 2009-11-12 | アイシン精機株式会社 | Vehicle peripheral display device |
| JP2011209779A (en)* | 2010-03-27 | 2011-10-20 | Honda Motor Co Ltd | Out-of-parking state communication system among multiple vehicles |
| JP2013047021A (en)* | 2011-08-28 | 2013-03-07 | Nippon Seiki Co Ltd | Head-up display device for vehicle |
- 2014
- 2014-11-14JPJP2014231274Apatent/JP6435798B2/ennot_activeExpired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009244960A (en)* | 2008-03-28 | 2009-10-22 | Toyota Motor Corp | Parking lot management apparatus, parking lot information providing system |
| WO2009136559A1 (en)* | 2008-05-08 | 2009-11-12 | アイシン精機株式会社 | Vehicle peripheral display device |
| JP2011209779A (en)* | 2010-03-27 | 2011-10-20 | Honda Motor Co Ltd | Out-of-parking state communication system among multiple vehicles |
| JP2013047021A (en)* | 2011-08-28 | 2013-03-07 | Nippon Seiki Co Ltd | Head-up display device for vehicle |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021103169A (en)* | 2017-06-01 | 2021-07-15 | テスラ,インコーポレイテッド | Technologies for vehicle positioning |
| US11366238B2 (en) | 2017-06-01 | 2022-06-21 | Tesla, Inc. | Systems and methods for correcting the geographic location of a vehicle |
| JP2021128589A (en)* | 2020-02-14 | 2021-09-02 | 矢崎エナジーシステム株式会社 | Vehicle stop judgment notification system |
| JP7488055B2 (en) | 2020-02-14 | 2024-05-21 | 矢崎エナジーシステム株式会社 | Vehicle stoppage detection and notification system |
| CN111785073A (en)* | 2020-07-07 | 2020-10-16 | 河南理工大学 | A parking lot guidance system based on human factors |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6435798B2 (en) | 2018-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6658905B2 (en) | Travel support device and computer program | |
| WO2016035486A1 (en) | Automatic driving assistance system, automatic driving assistance method, and computer program | |
| WO2016035485A1 (en) | Automatic driving assistance system, automatic driving assistance method, and computer program | |
| JP5729176B2 (en) | Movement guidance system, movement guidance apparatus, movement guidance method, and computer program | |
| JP6365134B2 (en) | Driving support system, driving support method, and computer program | |
| JP5545109B2 (en) | Driving support device, information distribution device, driving support method, information distribution method, and computer program | |
| JP6361403B2 (en) | Automatic driving support system, automatic driving support method, and computer program | |
| US20130024109A1 (en) | Travel guidance system, travel guidance apparatus, travel guidance method, and computer program | |
| JP6558129B2 (en) | Driving support system, driving support method, and computer program | |
| WO2018180756A1 (en) | Drive assistance system | |
| JP2018173860A (en) | Driving support device and computer program | |
| US20200231178A1 (en) | Vehicle control system, vehicle control method, and program | |
| JP2023012793A (en) | Superimposed image display device | |
| JP5953981B2 (en) | Probe information collection system | |
| JP6435798B2 (en) | Vehicle information guidance system, vehicle information guidance method, and computer program | |
| JP2017062706A (en) | Travel support system, travel support method, and computer program | |
| JP5803624B2 (en) | Vehicle control system, vehicle control device, vehicle control method, and computer program | |
| JP5163077B2 (en) | Route guidance system and program | |
| JP2019139349A (en) | Traffic information guide system and traffic information distribution device | |
| JP6582798B2 (en) | Driving support system, driving support method, and computer program | |
| JP2014154125A (en) | Travel support system, travel support method and computer program | |
| JP2019179296A (en) | Travelling assistance device and computer program | |
| JP2015007557A (en) | Associated parking lot registration system, associated parking lot registration method, and computer program | |
| JP5810721B2 (en) | Movement guidance system, movement guidance apparatus, movement guidance method, and computer program | |
| JP2013029378A (en) | Traveling guide system, traveling guide device, traveling guide method, and computer program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20170621 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20180508 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20180614 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20180703 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20180807 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20181016 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20181029 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:6435798 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 | |
| LAPS | Cancellation because of no payment of annual fees |