JP2014137611A - Driving assistance device - Google Patents
Driving assistance deviceDownload PDFInfo
- Publication number
- JP2014137611A JP2014137611AJP2013004390AJP2013004390AJP2014137611AJP 2014137611 AJP2014137611 AJP 2014137611AJP 2013004390 AJP2013004390 AJP 2013004390AJP 2013004390 AJP2013004390 AJP 2013004390AJP 2014137611 AJP2014137611 AJP 2014137611A
- Authority
- JP
- Japan
- Prior art keywords
- crossing
- vehicle
- image
- railroad crossing
- window
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Abstract
Translated fromJapaneseDescription
Translated fromJapanese本発明は、車両の運転を支援する運転支援装置に関する。 The present invention relates to a driving support device that supports driving of a vehicle.
従来から、車両が踏切を通過しようとするときは、踏切の直前で停止し、かつ、安全であることを確認した後でなければ進行してはならないと法令で定められている。ここで、踏切において安全であることを確認する方法の1つとして、車両の窓を開けて電車が近づいていないことを音によって確認する方法がある。しかし、踏切の直前で運転者が手動で窓を開放する動作は煩雑であり、目視のみで安全確認をおこなう運転者が多い。 Conventionally, when a vehicle tries to pass a railroad crossing, the law stipulates that the vehicle must stop before the railroad crossing and proceed only after confirming safety. Here, as one of methods for confirming safety at a railroad crossing, there is a method of confirming by sound that a train is not approaching by opening a window of a vehicle. However, it is complicated for the driver to manually open the window immediately before the crossing, and there are many drivers who confirm the safety only by visual observation.
このような問題に対応するため、たとえば、下記特許文献1では、地図データを用いて踏切を検索し、車両が踏切まで所定距離へ到達すると車両の窓を開放する技術が開示されている。 In order to cope with such a problem, for example, Patent Document 1 below discloses a technique for searching for a railroad crossing using map data and opening the vehicle window when the vehicle reaches a predetermined distance to the railroad crossing.
しかしながら、上述した従来技術では、踏切までの距離のみに基づいて窓を開閉するので、実際に車両が踏切に到達および通過するまで長時間を要する場合でも窓の開放状態が継続してしまう、すなわち、窓の開放タイミングを適切に設定することが困難であるという問題点がある。たとえば、電車の通過時や渋滞時には、車両が踏切まで所定距離へ到達した後も、踏切を通過するまでに時間がかかる可能性がある。窓の開放状態を長時間継続させると、車内の空調効率が低下したり、悪天時には降水などが車内に進入したりする可能性があり、不必要な窓の開放は可能な限り短時間にすることが望ましい。 However, in the above-described prior art, since the window is opened and closed based only on the distance to the railroad crossing, even if it takes a long time until the vehicle actually reaches and passes the railroad crossing, that is, the open state of the window continues. There is a problem that it is difficult to properly set the opening timing of the window. For example, when a train passes or is congested, it may take time to pass the railroad crossing even after the vehicle has reached a predetermined distance to the railroad crossing. If the window is kept open for a long time, the air conditioning efficiency in the car may decrease, and precipitation may enter the car during bad weather. Unnecessary windows can be opened as quickly as possible. It is desirable to do.
本発明は、上述した従来技術の問題点に鑑みてなされたものであり、踏切通過時に適切なタイミングで窓を開放させ、踏切走行時の安全性を向上させることを目的とする。 The present invention has been made in view of the above-described problems of the prior art, and an object of the present invention is to open a window at an appropriate timing when passing through a level crossing and to improve safety during a level crossing traveling.
上述した問題を解決し、目的を達成するため、請求項1の発明にかかる運転支援装置は、車両の進行方向の画像を撮像する撮像手段と、前記撮像手段によって撮像された前記画像から前記車両の進行方向にある踏切を検出する踏切検出手段と、前記画像を用いて前記踏切と前記車両との間の距離を推定する距離推定手段と、前記踏切への進入が制限されていない状態か否かを推定する状態推定手段と、前記踏切と前記車両との間の距離が所定距離以下となり、かつ前記踏切への進入が制限されていない場合に、前記車両の少なくとも運転席側の窓を開放する窓開閉手段と、を備えることを特徴とする。
また、請求項2の発明にかかる運転支援装置は、前記状態推定手段は、前記画像を用いて前記踏切に設けられた前記踏切警報機の警報灯の点灯の有無、または前記踏切の遮断機の昇降状態の少なくともいずれかを判定し、前記警報灯が点灯していない、または前記遮断機が降りていない場合に、前記踏切への進入が制限されていないと判定することを特徴とすることを特徴とする。
また、請求項3の発明にかかる運転支援装置は、前記状態推定手段は、前記踏切と前記車両との間の距離が所定距離以下となり、かつ前記車両のブレーキペダルが踏み込まれてから所定時間以内に前記車両のアクセルペダルが踏み込まれた場合に、前記踏切への進入が制限されていないと判定することを特徴とする。
また、請求項4の発明にかかる運転支援装置は、前記車両が前記踏切を横断完了したか否かを判定する横断判定手段を備え、前記窓開閉手段は、前記車両が前記踏切を横断完了したと判定された場合には、前記開放した窓を閉鎖することを特徴とする。
また、請求項5の発明にかかる運転支援装置は、前記横断判定手段は、前記車両の前後方向の加速度と前記車両の速度の時間微分値とを比較して、前記加速度と前記時間微分値との差分が所定値以上である間は前記踏切を横断中であると判定し、前記加速度と前記時間微分値との差分が所定値未満になると前記踏切を横断完了したと判定することを特徴とする。
また、請求項6の発明にかかる運転支援装置は、前記踏切検出手段は、前記画像から前記踏切警報機の形状をパターンマッチングによって抽出することにより、前記踏切を検出することを特徴とする。
また、請求項7の発明にかかる運転支援装置は、前記踏切検出手段は、前記画像から前記踏切近傍の色彩特徴点を抽出することにより、前記踏切を検出することを特徴とする。In order to solve the above-described problems and achieve the object, the driving support apparatus according to the invention of claim 1 includes an imaging unit that captures an image of the traveling direction of the vehicle, and the vehicle from the image captured by the imaging unit. A crossing detection means for detecting a crossing in the traveling direction, a distance estimation means for estimating a distance between the crossing and the vehicle using the image, and whether or not entry into the crossing is not restricted When the distance between the level crossing and the vehicle is less than a predetermined distance and entry to the level crossing is not restricted, at least the driver side window of the vehicle is opened. Window opening and closing means.
According to a second aspect of the present invention, in the driving support apparatus according to the second aspect of the present invention, the state estimating means uses the image to check whether a warning light of the level crossing alarm provided on the level crossing is lit or not. It is determined whether at least one of the up and down states, and when the warning light is not lit or the breaker is not down, it is determined that entry to the crossing is not restricted. Features.
According to a third aspect of the present invention, in the driving support apparatus according to the third aspect, the state estimating means includes a distance between the level crossing and the vehicle equal to or less than a predetermined distance, and within a predetermined time after the brake pedal of the vehicle is depressed. When the accelerator pedal of the vehicle is depressed, it is determined that entry to the crossing is not restricted.
According to a fourth aspect of the present invention, there is provided a driving support apparatus comprising crossing judging means for judging whether or not the vehicle has crossed the crossing, and the window opening / closing means has completed crossing the crossing of the vehicle. If it is determined, the open window is closed.
According to a fifth aspect of the present invention, in the driving support device, the crossing determination unit compares the acceleration in the longitudinal direction of the vehicle and the time differential value of the speed of the vehicle, and determines the acceleration and the time differential value. It is determined that the railroad crossing is being crossed while the difference is greater than or equal to a predetermined value, and it is determined that the crossing has been completed when the difference between the acceleration and the time differential value is less than a predetermined value. To do.
According to a sixth aspect of the present invention, the crossing detection means detects the crossing by extracting the shape of the crossing alarm from the image by pattern matching.
Further, the driving support device according to the invention of claim 7 is characterized in that the crossing detection means detects the crossing by extracting a color feature point in the vicinity of the crossing from the image.
請求項1の発明によれば、踏切と車両との間の距離に加え、踏切の状態に基づいて車両の窓を開放するので、適切なタイミングで窓を開放して、運転者に安全確認をおこなわせることができる。たとえば、踏切と車両との間の距離が近くても、渋滞時や列車の通過中など踏切に進入できない場合には車両が踏切を通過するまで時間がかかるため窓を開放させない。これにより、不要に窓を開放させる時間を短縮して、運転者の利便性を向上させることができる。
請求項2の発明によれば、画像を用いて踏切警報機の警報灯の点灯の有無、または踏切の遮断機の昇降状態の少なくともいずれかを判定するので、実際の踏切の状態に合わせて適切なタイミングで窓を開放することができる。
請求項3の発明によれば、車両のブレーキペダルおよびアクセルペダルの踏み込み量に基づいて踏切の状態を推定する。画像から踏切の状態を抽出する場合、画像の特徴量の変化が小さいことから、画像から踏切(踏切警報機など)を抽出するのと比較して困難な可能性がある。これにより、画像から踏切の状態を推定できない場合でも踏切の状態を推定して適切なタイミングで窓を開放することができる。
請求項4の発明によれば、車両が踏切を横断完了したか否かを判定して、横断完了したと判定された場合には窓を閉鎖するので、安全確認が必要な区間を通過した後には自動的に窓を閉鎖することができ、窓の開放に伴う車両環境への影響(温度変化など)を最小限にすることができる。
請求項5の発明によれば、車両の前後方向の加速度と車両の速度の時間微分値とを比較して踏切を横断完了したか否かを判定するので、たとえばGPS信号に基づいて算出した現在と地図データとを比較して踏切を横断完了したか否かを判定するのと比較して、より精度よく横断完了したか否かを判定することができる。
請求項6および請求項7の発明によれば、各種の画像解析方法を利用して踏切を検出することができる。According to the first aspect of the present invention, the vehicle window is opened based on the state of the railroad crossing in addition to the distance between the railroad crossing and the vehicle. Therefore, the window is opened at an appropriate timing to confirm the safety to the driver. You can do it. For example, even if the distance between the railroad crossing and the vehicle is short, if the vehicle cannot enter the railroad crossing, such as when there is a traffic jam or passing through a train, it takes time until the vehicle passes the railroad crossing, so the window is not opened. Thereby, the time for opening the window unnecessarily can be shortened and the convenience of the driver can be improved.
According to the invention of
According to the invention of claim 3, the state of the level crossing is estimated based on the depression amounts of the brake pedal and the accelerator pedal of the vehicle. When extracting the state of a crossing from an image, since the change in the feature amount of the image is small, it may be more difficult than extracting a crossing (such as a crossing alarm) from the image. As a result, even when the level crossing state cannot be estimated from the image, it is possible to estimate the level crossing state and open the window at an appropriate timing.
According to the invention of claim 4, it is determined whether or not the vehicle has completed the crossing of the railroad crossing. When it is determined that the vehicle has completed the crossing, the window is closed. Can automatically close the window, minimizing the impact on the vehicle environment (such as temperature changes) associated with opening the window.
According to the invention of claim 5, since it is determined whether or not the crossing of the crossing has been completed by comparing the longitudinal acceleration of the vehicle and the time differential value of the speed of the vehicle, for example, the current value calculated based on the GPS signal It is possible to determine whether or not the crossing is completed more accurately than comparing the map data with the map data and determining whether or not the crossing is completed.
According to the sixth and seventh aspects of the invention, it is possible to detect a crossing using various image analysis methods.
以下に添付図面を参照して、本発明にかかる運転支援装置の好適な実施の形態を詳細に説明する。 Exemplary embodiments of a driving support apparatus according to the present invention will be explained below in detail with reference to the accompanying drawings.
(実施の形態)
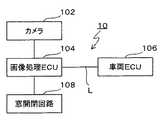
図1は、実施の形態にかかる運転支援装置10のハードウェア構成を示すブロック図である。運転支援装置10は、撮像手段であるカメラ102、画像処理ECU(Electronic Control Unit)104、車両ECU106、窓開閉回路108によって構成される。
カメラ102は、運転支援装置10が搭載された車両(以下、単に「車両」という)に設置され、車両の周辺の画像を撮像する。本実施の形態では、少なくとも車両の進行方向の画像を撮像できる位置に1台のカメラ102が設置されているものとする。(Embodiment)
FIG. 1 is a block diagram illustrating a hardware configuration of the
The
画像処理ECU104は、CPU、画像処理プログラムなどを格納・記憶するROM、画像処理プログラムの作動領域としてのRAM、各種データを書き換え可能に保持するEEPROM、周辺回路等とのインターフェースをとるインターフェース部などを含んで構成され、カメラ102で撮像された画像を処理する。 The
車両ECU106は、画像処理ECU104と同様に、CPU、車両制御プログラムなどを格納・記憶するROM、車両制御プログラムの作動領域としてのRAM、各種データを書き換え可能に保持するEEPROM、周辺回路等とのインターフェースをとるインターフェース部などを含んで構成され、車両全体の制御を司る。 Similarly to the
車両ECU106と画像処理ECU104とは、CAN(Controller Area Network)通信線Lで接続されている。画像処理ECU104は、CAN通信線Lを介して車両ECU106から車両の走行状態に関する各種の情報(たとえば、車両の走行速度情報や加速度情報、ブレーキペダルやアクセルペダルの踏み込み量など)を取得することが可能である。
なお、本実施の形態では、画像処理ECU104と車両ECU106とを別個のECUとしたが、たとえば画像処理ECU104を設けずに、車両ECU106において画像処理ECU104の処理をおこなってもよい。The vehicle ECU 106 and the image processing ECU 104 are connected by a CAN (Controller Area Network) communication line L. The
In the present embodiment, the
窓開閉回路108は、車両の窓を開閉するパワーウィンドウの動作を制御する回路である。窓開閉回路108は、画像処理ECU104からの制御信号によって、少なくとも運転席側の窓を開放または閉鎖する。なお、窓開閉回路108は、通常時(運転支援装置10の制御によらない場合)は図示しないウィンドウスイッチへの操作に基づいて窓の開閉を制御する。 The window opening /
なお、車両にナビゲーション装置(図示なし)が搭載されている場合、運転支援装置10は、ナビゲーション装置と連携して運転支援をおこなってもよい。 In addition, when the navigation apparatus (not shown) is mounted in the vehicle, the driving
図2は、運転支援装置10の機能的構成を示すブロック図である。運転支援装置10は、機能的には撮像手段(カメラ)102、踏切検出手段204、距離推定手段206、状態推定手段208、窓開閉手段210、横断判定手段212によって構成される。 FIG. 2 is a block diagram illustrating a functional configuration of the driving
撮像手段(カメラ)102は、車両の進行方向の画像を撮像する。撮像手段(カメラ)102は、たとえば車内のフロントガラスの上部に取り付けられている。撮像手段(カメラ)102は、複数のレンズを備えたステレオカメラであってもよいし、単眼カメラであってもよい。撮像手段(カメラ)102としてステレオカメラを設置した場合には、後述する距離推定手段206における処理が容易になる。また、単眼カメラを設置した場合には、設置コストを低く抑えることができる。 The imaging means (camera) 102 captures an image in the traveling direction of the vehicle. The imaging means (camera) 102 is attached to, for example, an upper part of a windshield inside the vehicle. The imaging means (camera) 102 may be a stereo camera provided with a plurality of lenses or a monocular camera. When a stereo camera is installed as the imaging means (camera) 102, processing in the distance estimation means 206 described later becomes easy. Moreover, when a monocular camera is installed, the installation cost can be kept low.
なお、車両にナビゲーション装置が搭載されている場合には、たとえば車両の現在位置が踏切まで所定距離D2(D2は後述する窓開閉手段210における所定距離D1よりも長い)以下となった場合に、撮像手段(カメラ)102による撮像を開始するようにしてもよい。これにより、運転支援装置10の処理負荷を低減することができる。 In the case where the navigation device is mounted on the vehicle, for example, when the current position of the vehicle is equal to or less than a predetermined distance D2 (D2 is longer than a predetermined distance D1 in a window opening / closing means 210 described later) until the railroad crossing. You may make it start the imaging by the imaging means (camera) 102. Thereby, the processing load of the driving
踏切検出手段204は、撮像手段(カメラ)102によって撮像された画像から車両の進行方向にある踏切を検出する。踏切検出手段204は、具体的には画像処理ECU104によって画像処理プログラムを実行することにより実現する。画像処理によって画像から特定の物体(本実施の形態では踏切)を検出する方法は様々なものがあり、本発明にもそれらを適用することができるが、たとえば、画像から踏切警報機の形状をパターンマッチングによって抽出することにより、踏切を検出する方法が挙げられる。より詳細には、踏切警報機の形状を示すテンプレート(異なる形状タイプや異なる角度から見た形状を含む)を用意しておき、このテンプレートを画像上で移動させながら比較し、テンプレートと所定の類似度を有する領域を特定することで、踏切を検出する。なお、車両が通行する道路上の踏切は、そのほとんどが踏切警報機と遮断機とが設置された第1種踏切と考えられ、踏切警報機を検出することによってほぼすべての踏切が検出できると考えられる。また、画像から踏切近傍の色彩特徴点を抽出することにより、踏切を検出するようにしてもよい。踏切警報機の警標(クロス状に交差した部分)や遮断機の遮断棹には、黄色と黒の縞模様となっている。このような特徴を抽出することによって踏切を検出してもよい。 The crossing
なお、車両にナビゲーション装置が搭載されている場合には、たとえば車両の現在位置が踏切まで所定距離D2以下となった場合に、踏切検出手段204による処理を開始するようにしてもよい。また、たとえば踏切検出手段204を常時稼働させつつ、車両の現在位置が踏切まで所定距離D2以下になるまでは処理の精度を低くして、車両の現在位置が踏切まで所定距離D2以下になると処理制度を高くするようにしてもよい。これにより、運転支援装置10の処理負荷を低減することができる。 When the navigation device is mounted on the vehicle, for example, when the current position of the vehicle is equal to or less than the predetermined distance D2 until the railroad crossing, the processing by the railroad
距離推定手段206は、撮像手段(カメラ)102によって撮像された画像を用いて踏切と車両との間の距離を推定する。距離推定手段206は、具体的には画像処理ECU104によって画像処理プログラムを実行することにより実現する。画像処理によって画像上の対象物(本実施の形態では踏切)とカメラ(本実施の形態ではカメラの位置を車両の位置と近似することとする)との距離を推定する方法は様々なものがあり、本発明にもそれらを適用することができるが、たとえば、撮像手段(カメラ)102がステレオカメラの場合は、複数のレンズでそれぞれ撮像した画像の視差を用いて、画像上の対象物(本実施の形態では踏切)とカメラ(本実施の形態では車両)との位置を検出することができる。また、撮像手段(カメラ)102が単眼カメラの場合は、単眼カメラで撮影した2枚以上の画像から対象物の画像上のスケールおよび対象物の向きを算出し、対象物の向きおよび車両の車速情報に基づいて車両の対象物に指向する移動速度を算出し、対象物に指向する移動速度および対象物の画像上のスケールに基づいて対象物までの距離を算出する方法が知られている(たとえば特開2011−64639号公報参照)。 The
なお、車両にナビゲーション装置が搭載されている場合には、たとえばナビゲーション装置によって算出された車両の現在位置と踏切までの距離とを用いて、距離推定手段206によって検出された距離を補正してもよい。また、距離推定手段206によって検出された距離に代えて、ナビゲーション装置によって算出された車両の現在位置と踏切までの距離とを用いてもよい。 If the navigation device is mounted on the vehicle, the distance detected by the
状態推定手段208は、踏切への進入が制限されていない状態か否かを推定する。状態推定手段208は、具体的には画像処理ECU104によって画像処理プログラムを実行する、または画像処理ECU104が車両ECU106から車両の状態を示す情報を取得して、当該情報を用いて踏切の状態を推定する。状態推定手段208は、たとえば撮像手段(カメラ)102によって撮像された画像を用いて、踏切に設けられた踏切警報機の警報灯の点灯の有無、または踏切の遮断機の昇降状態の少なくともいずれかを検出し、警報灯が点灯していない、または遮断機が降りていない場合に、踏切への進入が制限されていないと推定する。この場合、状態推定手段208は、画像処理によって踏切警報機の警報灯(赤色灯)が点滅しているか否か、遮断機の遮断棹の位置(角度)や移動の有無を検出する。 The state estimation means 208 estimates whether or not entry to the railroad crossing is not restricted. Specifically, the
また、状態推定手段208は、画像から踏切の状態を推定することが困難な場合、たとえば障害物によって警報灯付近が隠れている場合や遮断棹が画像から抽出できない場合などには、踏切と車両との間の距離が所定距離D3(D3は後述する窓開閉手段210における所定距離D1以下)以下となり、かつ車両のブレーキペダルが踏み込まれてから所定時間以内に車両のアクセルペダルが踏み込まれた場合に、踏切への進入が制限されていないと判定する。このような状態は、車両が踏切の直前で一時停止し(ブレーキペダルの踏み込み)、目視で安全確認をおこなった後、踏切を横断するためにアクセルペダルを踏み込んだものと考えられるためである。所定時間以内とは、たとえば数秒から数十秒程度とする。 In addition, the
窓開閉手段210は、踏切と車両との間の距離が所定距離D1以下となり、かつ踏切への進入が制限されていない場合に、車両の少なくとも運転席側の窓を開放する。窓開閉手段210は、具体的には所定の条件が成立した場合に画像処理ECU104が窓開閉回路108に対して所望の窓を開閉させるための制御信号を出力することによって実現する。 The window opening / closing means 210 opens at least the driver's side window of the vehicle when the distance between the railroad crossing and the vehicle is equal to or less than a predetermined distance D1 and entry into the railroad crossing is not restricted. Specifically, the window opening / closing means 210 is realized when the
図3は、窓開閉手段210による窓の開放タイミングを模式的に示す説明図である。図3A〜Cには、踏切30に向かって走行する車両32(運転支援装置10が搭載された車両)が示されている。図3Aに示す状態では、踏切30と車両32との間の距離が所定距離D1より長いので窓の開放はおこなわない。これは、車両32が踏切30に到達するまで時間を要するためである。特に、渋滞して車両32の前方に多くの車両が並んでいる場合には、車両32が踏切30に到達するまで長時間を要する可能性がある。 FIG. 3 is an explanatory view schematically showing the opening timing of the window by the window opening / closing means 210. 3A to 3C show a
図3Bに示す状態では、踏切30と車両32との間の距離が所定距離D1以下となっているものの、踏切30の警報灯が点滅し、遮断棹が降りた状態となっている。すなわち、踏切30を列車が通過するため、踏切への進入が制限されている。このような状態では、列車が通過するまで車両32は踏切30に通過できないため、窓の開放はおこなわない。特に、上り列車と下り列車が続けて通過する場合や駅近傍で他の列車の通過待ちをする列車がある場合などは、車両32が踏切30を通過できるようになるまで長時間を要する可能性がある。 In the state shown in FIG. 3B, although the distance between the
図3Cに示す状態では、踏切30と車両32との間の距離が所定距離D1以下となり、かつ警報灯の点灯や遮断機の降下がない、すなわち踏切への進入が制限されていない。この場合、窓開閉手段210は車両の少なくとも運転席側の窓を開放する。なお、図3Cに示す状態となった際にすでに運転席側の窓が開放されている場合には、そのままの状態を継続する。また、運転席側の窓の他、助手席側の窓も開放するようにしてもよい。 In the state shown in FIG. 3C, the distance between the
また、窓の開放量は運転者が音によって安全確認をおこなえる程度であればよい。たとえば、車内の音声状態(同乗者の会話の音量、カーステレオからの出力音量など)を考慮して窓の開放量を変更してもよい。この場合、たとえば車内で発せられている音量が大きいほど窓の開放量を大きくする。また、ワイパーの動作状態から降水の有無を判定し、降水がある場合には車内に降水が入り込まないように窓の開放量を通常時よりも小さくしてもよい。 Further, the opening amount of the window may be such that the driver can confirm safety by sound. For example, the opening amount of the window may be changed in consideration of the voice state in the vehicle (volume of conversation of passengers, output volume from the car stereo, etc.). In this case, for example, the amount of opening of the window is increased as the volume of sound generated in the vehicle increases. Moreover, the presence or absence of precipitation may be determined from the operating state of the wiper, and the amount of opening of the window may be made smaller than usual so that precipitation does not enter the vehicle when there is precipitation.
図2の説明に戻り、横断判定手段212は、車両が踏切を横断完了したか否かを判定する。横断判定手段212によって車両が前記踏切を横断完了したと判定された場合、窓開閉手段210は、安全確認が必要な区間を通過したものとして開放した窓を閉鎖する。横断判定手段212は、具体的には画像処理ECU104が車両ECU106から車両の状態を示す情報を取得して、当該情報を用いて車両が踏切を横断完了したか否かを判定する。より詳細には、横断判定手段212は、車両の前後方向の加速度と車両の速度の時間微分値とを比較して、加速度と時間微分値との差分が所定値以上である間は踏切を横断中であると判定し、加速度と時間微分値との差分が所定値未満になると踏切を横断完了したと判定する。 Returning to the description of FIG. 2, the crossing
図4は、横断判定手段212による横断判定方法を模式的に示す説明図である。図4Aは車両の前後方向の加速度を計測する加速度センサにより計測された加速度の値であり、縦軸は加速度、横軸は時刻を示す。図4Bは車両の速度を計測する速度センサにより計測された速度を時間微分した速度微分値であり、縦軸は速度微分値、横軸は時刻を示す。図4では車両が時刻t0に踏切に進入し、時刻t1に踏切を横断完了したものとする。 FIG. 4 is an explanatory diagram schematically showing a crossing determination method by the crossing
加速度センサでは、加速度センサ内部のおもりにかかった力を計測している。車両が踏切内の線路を通過した際には、段差の乗り越えが多いため、図4Aに示すような変動が大きい波形になる。一方、段差の乗り越えによって車両の速度は穏やかに減少すると予測される。このため、図4Bに示す速度の時間微分値の変化は微小であると考えられる。横断判定手段212では、図4Aおよび図4Bを比較して、両グラフの差分が所定値以下になる時刻t1に車両が踏切を横断完了したと判定する。 The acceleration sensor measures the force applied to the weight inside the acceleration sensor. When the vehicle passes through the railroad track within the railroad crossing, there are many steps over the level difference, so that a waveform as shown in FIG. 4A has a large fluctuation. On the other hand, it is predicted that the speed of the vehicle will gently decrease by overcoming the step. For this reason, the change of the time differential value of the speed shown in FIG. 4B is considered to be minute. 4A and 4B are compared, and the crossing determination means 212 determines that the vehicle has completed crossing the railroad crossing at time t1 when the difference between the two graphs is equal to or less than a predetermined value.
なお、車両にナビゲーション装置が搭載されている場合には、たとえばナビゲーション装置によって算出された車両の現在位置と踏切の位置とを比較して車両が踏切を横断完了したか否かを判定することも可能である。しかし、ナビゲーション装置の位置検出精度(GPSユニットの精度)によっては、上述した横断判定手段212を用いた方法の方が判定制度が高いと考えられる。 When the navigation device is mounted on the vehicle, for example, the current position of the vehicle calculated by the navigation device and the level crossing position are compared to determine whether or not the vehicle has completed crossing the level crossing. Is possible. However, depending on the position detection accuracy of the navigation device (accuracy of the GPS unit), the method using the crossing determination means 212 described above is considered to have a higher determination system.
図5は、運転支援装置10による処理の手順を示すフローチャートである。図5のフローチャートにおいて、運転支援装置10は、まず、撮像手段(カメラ)102によって車両の進行方向の画像を撮像する(ステップS501)。つぎに、運転支援装置10は、踏切検出手段204によって画像から踏切を検出する。画像から踏切が検出されない場合は(ステップS502:No)、ステップS501に戻り、画像の撮像を継続する。一方、画像から踏切が検出されると(ステップS502:Yes)、距離推定手段206によって踏切と車両との間の距離を推定する(ステップS503)。 FIG. 5 is a flowchart illustrating a processing procedure performed by the driving
また、状態推定手段208は、画像から踏切の状態を推定可能か否かを判断し(ステップS504)、画像から踏切の状態(進入が制限されていないか否か)を推定可能な場合は(ステップS504:Yes)、画像を用いて踏切の状態を推定する(ステップS505)。一方、画像から踏切の状態を推定できない場合は(ステップS504:No)、車両のアクセルペダルおよびブレーキペダルの踏み込み量の状態を用いて踏切の状態を推定する(ステップS506)。 Further, the state estimating means 208 determines whether or not the level crossing state can be estimated from the image (step S504), and when the level crossing state (whether entry is not restricted) can be estimated from the image ( In step S504: Yes), the state of the railroad crossing is estimated using the image (step S505). On the other hand, when the level crossing state cannot be estimated from the image (step S504: No), the level crossing state is estimated using the state of the depression amount of the accelerator pedal and the brake pedal of the vehicle (step S506).
つづいて、運転支援装置10は、窓開閉手段210によって踏切と車両との間の距離が所定距離以下か否かを判断する(ステップS508)。踏切と車両との間の距離が所定距離より長い場合は(ステップS508:No)、窓の開放タイミングではないためステップS501に戻り、以降の処理をくり返す。 Subsequently, the driving
一方、踏切と車両との間の距離が所定距離以下の場合(ステップS508:Yes)、窓開閉手段210は、踏切への進入が制限されていない否かを判断する(ステップS509)。踏切への進入が制限されている場合は(ステップS509:No)、窓の開放タイミングではないためステップS501に戻り、以降の処理をくり返す。 On the other hand, when the distance between the railroad crossing and the vehicle is equal to or smaller than the predetermined distance (step S508: Yes), the window opening / closing means 210 determines whether or not entry to the railroad crossing is restricted (step S509). If entry to a railroad crossing is restricted (step S509: No), it is not the window opening timing, so the process returns to step S501 and the subsequent processing is repeated.
一方、踏切への進入が制限されていない場合(ステップS509:Yes)、車両が踏切を横断するタイミングが近いため、窓開閉手段210は、車両の少なくとも運転席側の窓を開放する(ステップS510)。そして、横断判定手段212によって車両が踏切を横断完了したか否かを判断し(ステップS511)、車両が踏切を横断完了すると(ステップS511:Yes)、窓開閉手段210が開放した窓を閉鎖して(ステップS512)、本フローチャートによる処理を終了する。 On the other hand, when entry to the railroad crossing is not restricted (step S509: Yes), since the timing of the vehicle crossing the railroad crossing is close, the window opening / closing means 210 opens at least the driver side window of the vehicle (step S510). ). Then, it is determined whether or not the vehicle has completed the crossing by the crossing determination means 212 (step S511). When the vehicle has completed the crossing by the crossing (step S511: Yes), the window opening / closing means 210 closes the opened window. (Step S512), the process according to this flowchart is terminated.
以上説明したように、実施の形態にかかる運転支援装置10は、踏切と車両との間の距離に加え、踏切の状態に基づいて車両の窓を開放するので、適切なタイミングで窓を開放して、運転者に安全確認をおこなわせることができる。たとえば、踏切と車両との間の距離が近くても、渋滞時や列車の通過中など踏切に進入できない場合には車両が踏切を通過するまで時間がかかるため窓を開放させない。これにより、不要に窓を開放させる時間を短縮して、運転者の利便性を向上させることができる。 As described above, the driving
また、運転支援装置10は、画像を用いて踏切警報機の警報灯の点灯の有無、または踏切の遮断機の昇降状態の少なくともいずれかを判定するので、実際の踏切の状態に合わせて適切なタイミングで窓を開放することができる。また、運転支援装置10は、画像から踏切の状態を推定できない場合には、車両のブレーキペダルおよびアクセルペダルの踏み込み量に基づいて踏切の状態を推定する。画像から踏切の状態を抽出する場合、画像の特徴量の変化が小さいことから、画像から踏切(踏切警報機など)を抽出するのと比較して困難な可能性がある。これにより、画像から踏切の状態を推定できない場合でも踏切の状態を推定して適切なタイミングで窓を開放することができる。 Further, the driving
また、運転支援装置10は、車両が踏切を横断完了したか否かを判定して、横断完了したと判定された場合には窓を閉鎖するので、安全確認が必要な区間を通過した後には自動的に窓を閉鎖することができ、窓の開放に伴う車両環境への影響(温度変化など)を最小限にすることができる。このとき、運転支援装置10は、車両の前後方向の加速度と車両の速度の時間微分値とを比較して踏切を横断完了したか否かを判定するので、たとえばGPS信号に基づいて算出した現在と地図データとを比較して踏切を横断完了したか否かを判定するのと比較して、より精度よく横断完了したか否かを判定することができる。 In addition, the driving
また、運転支援装置10は、パターンマッチングや特徴点抽出など、各種の画像解析方法を利用して踏切を検出することができる。 Further, the driving
10……運転支援装置、102……撮像手段(カメラ)、104……画像処理ECU、106……車両ECU、108……窓開閉回路、204……踏切検出手段、206……距離推定手段、208……状態推定手段、210……窓開閉手段、212……横断判定手段、L……CAN通信線。 DESCRIPTION OF
Claims (7)
Translated fromJapanese前記撮像手段によって撮像された前記画像から前記車両の進行方向にある踏切を検出する踏切検出手段と、
前記画像を用いて前記踏切と前記車両との間の距離を推定する距離推定手段と、
前記踏切への進入が制限されていない状態か否かを推定する状態推定手段と、
前記踏切と前記車両との間の距離が所定距離以下となり、かつ前記踏切への進入が制限されていない場合に、前記車両の少なくとも運転席側の窓を開放する窓開閉手段と、
を備えることを特徴とする運転支援装置。Imaging means for capturing an image of the traveling direction of the vehicle;
A crossing detection means for detecting a crossing in the traveling direction of the vehicle from the image picked up by the image pickup means;
Distance estimating means for estimating a distance between the railroad crossing and the vehicle using the image;
State estimating means for estimating whether or not entry to the railroad crossing is not restricted;
A window opening / closing means for opening at least a driver seat side window of the vehicle when a distance between the railroad crossing and the vehicle is equal to or less than a predetermined distance and entry to the railroad crossing is not restricted;
A driving support apparatus comprising:
前記窓開閉手段は、前記車両が前記踏切を横断完了したと判定された場合には、前記開放した窓を閉鎖することを特徴とする請求項1から3のいずれか一つに記載の運転支援装置。Crossing judging means for judging whether or not the vehicle has crossed the railroad crossing,
The driving support according to any one of claims 1 to 3, wherein the window opening / closing means closes the opened window when it is determined that the vehicle has crossed the railroad crossing. apparatus.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013004390AJP2014137611A (en) | 2013-01-15 | 2013-01-15 | Driving assistance device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013004390AJP2014137611A (en) | 2013-01-15 | 2013-01-15 | Driving assistance device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014137611Atrue JP2014137611A (en) | 2014-07-28 |
Family
ID=51415097
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013004390APendingJP2014137611A (en) | 2013-01-15 | 2013-01-15 | Driving assistance device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014137611A (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109466556A (en)* | 2017-09-08 | 2019-03-15 | 本田技研工业株式会社 | Vehicle control device, vehicle control method, and storage medium |
| JP2019048512A (en)* | 2017-09-08 | 2019-03-28 | 本田技研工業株式会社 | Vehicle control device, vehicle control method, and program |
| JP2019190311A (en)* | 2018-04-20 | 2019-10-31 | トヨタ自動車株式会社 | Diagnosis server |
| JP2022507128A (en)* | 2018-11-13 | 2022-01-18 | ベイジン センスタイム テクノロジー デベロップメント シーオー.,エルティーディー | Intersection condition detection methods, devices, electronic devices and vehicles |
| CN114241798A (en)* | 2021-12-16 | 2022-03-25 | 浙江吉利控股集团有限公司 | Vehicle positioning method, device, mobile terminal and system |
| US12409849B2 (en) | 2020-04-28 | 2025-09-09 | Shenzhen Yinwang Intelligent Technologies Co., Ltd. | Method and apparatus for passing through barrier gate crossbar by vehicle |
- 2013
- 2013-01-15JPJP2013004390Apatent/JP2014137611A/enactivePending
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109466556A (en)* | 2017-09-08 | 2019-03-15 | 本田技研工业株式会社 | Vehicle control device, vehicle control method, and storage medium |
| JP2019049811A (en)* | 2017-09-08 | 2019-03-28 | 本田技研工業株式会社 | Vehicle control device, vehicle control method, and program |
| JP2019048512A (en)* | 2017-09-08 | 2019-03-28 | 本田技研工業株式会社 | Vehicle control device, vehicle control method, and program |
| US10777077B2 (en)* | 2017-09-08 | 2020-09-15 | Honda Motor Co., Ltd. | Vehicle control device, vehicle control method, and storage medium |
| US10796570B2 (en) | 2017-09-08 | 2020-10-06 | Honda Motor Co., Ltd. | Vehicle control device, vehicle control method, and storage medium |
| CN109466556B (en)* | 2017-09-08 | 2022-04-26 | 本田技研工业株式会社 | Vehicle control device, vehicle control method, and storage medium |
| JP2019190311A (en)* | 2018-04-20 | 2019-10-31 | トヨタ自動車株式会社 | Diagnosis server |
| JP7059772B2 (en) | 2018-04-20 | 2022-04-26 | トヨタ自動車株式会社 | Diagnostic server |
| JP2022507128A (en)* | 2018-11-13 | 2022-01-18 | ベイジン センスタイム テクノロジー デベロップメント シーオー.,エルティーディー | Intersection condition detection methods, devices, electronic devices and vehicles |
| US12409849B2 (en) | 2020-04-28 | 2025-09-09 | Shenzhen Yinwang Intelligent Technologies Co., Ltd. | Method and apparatus for passing through barrier gate crossbar by vehicle |
| CN114241798A (en)* | 2021-12-16 | 2022-03-25 | 浙江吉利控股集团有限公司 | Vehicle positioning method, device, mobile terminal and system |
| CN114241798B (en)* | 2021-12-16 | 2023-09-05 | 浙江吉利控股集团有限公司 | Vehicle positioning method, device, mobile terminal and system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105620489B (en) | Driving assistance system and vehicle real-time early warning based reminding method | |
| CN107346612B (en) | Vehicle anti-collision method and system based on Internet of vehicles | |
| JP2014137611A (en) | Driving assistance device | |
| CN105799512A (en) | Vehicle overspeed reminding method and system | |
| CN108454621B (en) | Intelligent vehicle and control method, device and system thereof, and computer storage medium | |
| CN112208522B (en) | Apparatus and method for controlling driving of vehicle | |
| CN106157661B (en) | The limitation speed display device of vehicle | |
| CN106709420A (en) | Method for monitoring driving behaviors of driver of commercial vehicle | |
| JP2011248855A (en) | Vehicle collision warning apparatus | |
| KR20150017096A (en) | Apparatus and Method for Controlling of Navigation | |
| CN104724125A (en) | vehicle control device | |
| US20230169779A1 (en) | Vehicle control apparatus | |
| CN202624199U (en) | Control device for controlling speed of automobile by using traffic light | |
| KR20170050433A (en) | Vehicle Control System and Method Thereof | |
| TWI592883B (en) | Image recognition system and its adaptive learning method | |
| CN109661338A (en) | Determination method, parking assistance method, outbound householder method and the obstacle judgment device of barrier | |
| CN110827575A (en) | Collaborative vehicle safety system and method | |
| CN109532842A (en) | Traffic condition detection system and method | |
| CN118025093B (en) | A bus automatic emergency braking system and method based on passenger status recognition | |
| KR20180064639A (en) | Vehicle and control method thereof | |
| KR20150044134A (en) | A device for inducing to change in a passing lane and method thereof | |
| CN112740220A (en) | System and method for traffic light recognition | |
| JP2010039718A (en) | Vehicle control device, vehicle control method, and vehicle control processing program | |
| CN113487909B (en) | Bend opposite vehicle early warning method and system based on voiceprint recognition | |
| KR101684020B1 (en) | Apparatus and Method for detecting a vehicle in the blind spot |