JP2014067308A - Farming management system and crop harvester - Google Patents
Farming management system and crop harvesterDownload PDFInfo
- Publication number
- JP2014067308A JP2014067308AJP2012213253AJP2012213253AJP2014067308AJP 2014067308 AJP2014067308 AJP 2014067308AJP 2012213253 AJP2012213253 AJP 2012213253AJP 2012213253 AJP2012213253 AJP 2012213253AJP 2014067308 AJP2014067308 AJP 2014067308A
- Authority
- JP
- Japan
- Prior art keywords
- farmland
- information
- crop
- data
- quality
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Combines (AREA)
- Threshing Machine Elements (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
Translated fromJapaneseDescription
Translated fromJapanese本発明は、農作物収穫機によって収穫作業が行われる農地に関する農地情報と、前記収穫作業で得られた農作物に関する農作物情報とを管理する農作管理システムに関する。さらに、本発明はそのような農作管理システムに組み込まれる農作物収穫機にも関する。 The present invention relates to a farm management system for managing farmland information related to farmland where a harvesting operation is performed by a crop harvester and farmland information related to the crop obtained by the harvesting work. Furthermore, the present invention also relates to a crop harvester incorporated in such a farm management system.
コンピュータシステムを用いて農産物の生産から消費者の手に渡るまでの生産管理や生産履歴の情報を管理する農作業管理技術が、例えば特許文献1から知られている。この特許文献1による管理システムでは、生育診断機が所定の生産単位区画において生育診断を実行し、それぞれの測定点における測定診断結果と位置情報とがメモリカードに記録される。その記録内容は、後に農作管理コンピュータシステムに送信される。また、その作業単位区画での収穫機による収穫作業において、収穫機に取り付けた計測装置によってその作業単位区画の収穫量が計測され、収穫した作業単位区画の収穫量とGPSで得られた位置情報とがメモリカードに記録され、その記録内容が農作管理コンピュータシステムに送信される。生産単位区画内の作業単位区画毎に生育途中の農産物に、例えば近赤外線を照射してその反射光を分析することで測定を行う。その測定内容は、例えば米であれば葉色、丈長、茎数、穂数などである。この農作業管理技術では、収穫作業時に、位置と収穫量とが記録されるので、農地の位置と収穫量との関係を把握することが可能である。しかしながら、農産物にとって重要な情報である農産物の品質と農地の位置との関係を把握することはできない。また、収穫作業における区画毎の農作物情報生成の具体的な方法は開示されていない。 A farm work management technique for managing production management and production history information from the production of agricultural products to the hands of consumers using a computer system is known from
また、農地を区画化し、区画単位で農作業車の作業を記録する農作業機管理装置が、特許文献2から知られている。この管理装置では、作業車のコントローラと通信できる作業管理端末機に、地図データを記憶するDVD読取装置、GPS受信機及びジャイロセンサが備えられ、地図データから作業場の外形を取り込む。この取り込んだ作業場の地図データを区画化し、局所的な情報(電柱などの障害物の存在)を記憶する。例えば、農作業車がコンバインの場合、収穫作業で得られた籾の総排出量が圃場全体の収穫量として入力される。また農作業車がトラクタであれば、耕耘作業で得られた耕深センサ検出値が、圃場区画毎の耕深値として、自動で記録される。この管理装置でも、農産物の収穫量は取り扱われているが、農産物の品質は取り扱われていない。 Also, Japanese Patent Application Laid-Open No. 2004-151867 discloses an agricultural machine management device that partitions agricultural land and records the work of agricultural vehicles in units of sections. In this management apparatus, a work management terminal that can communicate with a controller of a work vehicle is provided with a DVD reader, a GPS receiver, and a gyro sensor that store map data, and the outline of the workplace is captured from the map data. The captured map data of the workplace is sectioned and local information (presence of obstacles such as utility poles) is stored. For example, when the farm vehicle is a combine, the total discharge amount of the straw obtained by the harvesting operation is input as the harvest amount of the entire field. If the farm vehicle is a tractor, the plowing depth sensor detection value obtained by the plowing work is automatically recorded as the plowing depth value for each field section. Even with this management device, the yield of agricultural products is handled, but the quality of agricultural products is not handled.
さらには、農地としての圃場に関して得られた情報、例えば、気温、日照量、雨量、農作物の生育情報などを情報センタに登録しておき、コンバインによる収穫作業時にそれらの情報に基づいて農作物の生育状態を判定し、刈取部や脱穀部の処理条件を最適にする農作業機械も提案されている(例えば、特許文献3参照)。この特許文献3による技術では、予め個別に生育情報などを取得して、それを情報センタに登録しておくことが前提条件となる。 Furthermore, information obtained on the field as farmland, for example, temperature, sunshine amount, rainfall, crop growth information, etc., is registered in the information center, and the crop growth is based on the information during the harvesting operation by the combine. An agricultural machine that determines the state and optimizes the processing conditions of the harvesting unit and the threshing unit has also been proposed (see, for example, Patent Document 3). In the technique according to
また、穀粒品質を検出する検出装置を搭載し、この検出装置による検出結果に基づいて採用するべきコンバイン運転状態を報知するコンバインが特許文献4から知られている。具体的には、穀粒の含有水分の検出結果に基づいて最適脱穀値を表示し、それに基づいてオペレータが扱胴の駆動速度などを調整することができるように構成されている。収穫作業中に得られた穀粒の含有水分などの穀粒品質に関係する検出データを脱穀作業後にも利用することは開示されていない。 Moreover, the combine which notifies the combine driving | running state which mounts the detection apparatus which detects grain quality and should be employ | adopted based on the detection result by this detection apparatus is known from patent document 4. FIG. Specifically, the optimum threshing value is displayed based on the detection result of the moisture content of the grain, and the operator can adjust the driving speed of the handling cylinder based on the value. It is not disclosed that the detection data related to the grain quality such as the moisture content of the grain obtained during the harvesting operation is used even after the threshing operation.
上記実情に鑑み、収穫機による農作物の収穫時に、収穫作業が行われている農地の位置を含む農地情報とこの収穫作業で得られた農作物の品質を含む農作物情報を生成し、それをデータベース化し、随時利用できる農作管理システムが要望されている。 In view of the above situation, at the time of harvesting crops by the harvester, farmland information including the location of the farmland where the harvesting work is being performed and crop information including the quality of the crop obtained by this harvesting work is generated, and the database is created. There is a need for an agricultural management system that can be used from time to time.
本発明による農作管理システムでは、農作物収穫機によって収穫作業が行われる農地に関する農地情報と、前記収穫作業で得られた農作物に関する農作物情報とを管理するために、前記農地情報として収穫作業位置を示す収穫位置データと、前記農作物情報として前記農地で収穫された農作物の収穫量を示す収穫量データ及びその品質を示す品質データとを、前記農作物収穫機から受け取るデータ入力部と、前記農地情報と前記農作物情報とを互いに関連付け可能に記録するデータベースサーバと、前記農地情報と前記農作物情報とに基づいて前記農地の農作評価を行う農作評価部と、前記農作評価部によって生成された農作評価データを送り出すデータ出力部とが備えられている。 In the farm management system according to the present invention, in order to manage the farmland information regarding the farmland where the harvesting work is performed by the crop harvester and the farmland information regarding the crop obtained by the harvesting work, the harvesting work position is indicated as the farmland information. A data input unit that receives, from the crop harvester, harvest position data, yield data indicating the yield of the crop harvested on the farm land as the crop information, and quality data indicating the quality thereof, the farm land information, and the crop information A database server that records the crop information so as to be able to be associated with each other, a farm evaluation unit that performs farm evaluation of the farm land based on the farm land information and the crop information, and the farm evaluation data generated by the farm evaluation unit And a data output unit.
この構成によれば、農作物収穫機による農作業の結果として得られる、収穫位置データと収穫量データと品質データとを互いに関連付けてデータベース化することができる。収穫位置データに基づいて特定される農地と、その農地で収穫された農作物の収穫量と品質とが関連付けられることで農地単位の農作評価が可能となる。その農作評価によって得られた農作評価データは、データダウンロードの要望に応じて送り出される。この農作評価データをユーザ端末に表示させることで、ユーザである農作業家は、注目する農地における農作物の収穫量だけでなくその品質も把握することができる。 According to this configuration, the harvest position data, the harvest amount data, and the quality data obtained as a result of the farm work by the crop harvesting machine can be associated with each other to form a database. Agricultural evaluation in units of farmland becomes possible by associating the farmland specified based on the harvesting position data with the harvest amount and quality of the crops harvested on the farmland. The farming evaluation data obtained by the farming evaluation is sent out in response to a request for data download. By displaying this farming evaluation data on the user terminal, the farmer who is the user can grasp not only the amount of crops harvested on the farmland of interest but also the quality thereof.
農地単位の収穫量及び品質に関する情報を、次なる農作にフィードバックさせてより効率的な農作を達成するためには、同じ農地であってもわずかな場所の違いによって日照条件や土壌特性が異なっていることから収穫量や品質が異なってくるということも考慮するとよい。そのため、本発明の好適な実施形態の一つでは、前記農地情報は、作業対象となる農地を所定の大きさで分割して得られた微小区画毎に対応付けて生成され、前記農作物情報も前記微小区画に対応付けて生成される。例えば、一辺が数mから数十mのエリアとして微小区画が設定されると、小屋や大木による日陰や局地的な土壌不良などによる収穫量の低下を品質の低下を把握することができ、そのようなエリアには特別な肥料を施したり、土壌改善を施したりすることも可能となる。また、特定のエリアにおける試験的な農作も可能となる。 In order to feed back information on the yield and quality of each farmland to the next farming to achieve more efficient farming, even in the same farmland, the sunshine conditions and soil characteristics differ depending on slight differences in location. Considering that the yield and quality will vary. Therefore, in one of the preferred embodiments of the present invention, the farmland information is generated in association with each small section obtained by dividing the farmland to be worked into a predetermined size, and the crop information is also generated. It is generated in association with the minute section. For example, when a small section is set as an area of several meters to several tens of meters on one side, it is possible to grasp the decline in quality due to a decline in yield due to shading or large trees and local soil defects. Such areas can be specially fertilized or soil improved. Also, experimental farming in a specific area is possible.
コンバインなどの農作物収穫機は、線状(直線または曲線)に走行しながら収穫作業を行うので、その収穫幅は1mから3m程度である。従って、経時的に取得される農作物情報は、その収穫幅をもった走行軌跡に沿って順次得られることになる。従って、農作評価のための単位農地面積を一辺が数mから数十mのエリアとする場合、前記農作物収穫機走行軌跡に対応して生成された経時的な農作物情報を前記微小区画に割り当てるデータ変換が必要となるので、この機能を前記農作評価部が有するように構成すると好都合である。 A crop harvester such as a combine performs a harvesting operation while traveling linearly (straight or curved), and the harvest width is about 1 m to 3 m. Accordingly, the crop information acquired over time is sequentially obtained along the traveling locus having the harvest width. Therefore, when the unit farmland area for agricultural evaluation is an area having a side of several meters to several tens of meters, data for assigning temporal crop information generated corresponding to the crop harvester traveling locus to the minute section Since conversion is required, it is advantageous to configure the farm evaluation unit to have this function.
前記農作物収穫機を穀物用コンバインに適用する場合、前記収穫量データは単位時間当たりの脱穀処理量から生成され、前記品質データは前記コンバインに装備された食味センサユニットの測定結果から生成されるように構成すると好都合である。コンバインは、刈り取った穀桿を脱穀して得られた穀粒をタンクに貯蔵するかあるいは袋詰めにする機能を有する。従って、その作業過程において、穀粒の流量、つまり収穫量を簡単に測定することができる。また、流れていく穀粒に対して光ビームを照射することで水分やタンパクの成分量を測定してその品質(食味)を測定する食味センサユニットを設置することで穀粒の品質データを簡単に得ることができる。例えば、乾燥施設において、目標水分量毎に複数の乾燥機が設定されているような場合に、そのコンバインによって収穫された穀粒をどの乾燥機に持ち込めば良いかが事前に分かり、乾燥施設への効率の良い搬送が可能となる。従って、品質データとして収穫穀粒の水分を採用することは効果的である。 When the crop harvester is applied to a grain combiner, the yield data is generated from a threshing amount per unit time, and the quality data is generated from a measurement result of a taste sensor unit installed in the combine. It is convenient to configure. The combine has a function of storing in a tank or bagging the grain obtained by threshing the harvested cereal. Therefore, the grain flow rate, that is, the yield can be easily measured during the work process. In addition, the grain quality data can be easily obtained by installing a taste sensor unit that measures the quality (taste) of the moisture and protein components by irradiating the flowing grain with a light beam. Can get to. For example, in a drying facility, when multiple dryers are set for each target moisture content, it is known in advance which dryer the grain harvested by the combine should be brought into, and the Efficient conveyance is possible. Therefore, it is effective to adopt the moisture of the harvested grain as quality data.
上述した農作管理システムに適した農作物収穫機も本発明の対象である。そのような農作物収穫機は、農作管理コンピュータシステムに対して、収穫作業が行われる農地に関する農地情報と、前記収穫作業で得られた農作物に関する農作物情報とを送る必要がある。そのため、本発明による農作物収穫機は、自機位置を測定する測位モジュールと、前記農地で収穫された農作物の収穫量を測定する収穫量センサと、前記農地で収穫された農作物の品質を測定する品質センサと、前記測位モジュールの測定結果から収穫作業位置を示す収穫位置データを前記農地情報として生成する農地情報生成部と、前記収穫量センサの測定結果から収穫量データを前記農作物情報として生成するとともに、前記品質センサの測定結果から品質データを前記農作物情報として生成する農作物情報生成部と、前記農地情報と前記農作物情報とを関係付けて送信情報を作成する送信情報管理部と、前記送信情報を前記農作管理コンピュータシステムに送る通信モジュールとを備えている。 A crop harvester suitable for the farm management system described above is also an object of the present invention. Such a crop harvester needs to send, to the farm management computer system, farmland information about the farmland where the harvesting work is performed and crop information about the crop obtained by the harvesting work. Therefore, the crop harvesting machine according to the present invention measures a positioning module for measuring its own position, a yield sensor for measuring the yield of the crop harvested on the farmland, and the quality of the crop harvested on the farmland. A quality sensor, a farmland information generation unit that generates harvesting position data indicating a harvesting work position from the measurement result of the positioning module as the farmland information, and yield data from the measurement result of the harvesting sensor as the crop information. And a crop information generation unit that generates quality data from the measurement result of the quality sensor as the crop information, a transmission information management unit that creates transmission information by associating the farmland information and the crop information, and the transmission information And a communication module for sending the information to the farm management computer system.
この農作物収穫機では、収穫作業中に収穫位置データを含む農地情報が生成されるとともに、収穫された農作物の収穫量データ及びその農作物の品質データを含む農作物情報も生成される。生成された農地情報と農作物情報とを関係付けた送信情報が農作物収穫機から農作管理コンピュータシステムへ送られる。これにより、所定収穫位置における農作物の収穫量と品質とが農作管理コンピュータシステムに蓄積されるので、この情報を評価することにより、効率的な農作を実践することが可能となる。 In this crop harvesting machine, farmland information including harvesting position data is generated during the harvesting operation, and crop information including harvested amount data of harvested crops and quality data of the crops is also generated. Transmission information that associates the generated farmland information with the crop information is sent from the crop harvester to the farm management computer system. As a result, the harvest amount and quality of the crop at the predetermined harvest position are accumulated in the farm management computer system, so that it is possible to practice efficient farming by evaluating this information.
稲や小麦などの農作物の場合、走行しながら連続的に収穫作業が行われる。このため、前記農作物情報として、所定の作業走行距離あたりの収穫量を算出しておくと好都合である。特に、上述したように、作業対象となる農地を所定の大きさで分割して得られた微小区画毎に対応付けて農地情報を生成する場合、作業走行距離あたりの収穫量から簡単に微小区画当たりの収穫量を算出することができる。 In the case of crops such as rice and wheat, harvesting operations are performed continuously while traveling. For this reason, it is convenient to calculate the yield per predetermined work travel distance as the crop information. In particular, as described above, when generating farmland information in association with each minute section obtained by dividing the farmland to be worked by a predetermined size, the minute section can be easily calculated from the harvest amount per work travel distance. The yield per hit can be calculated.
農作物が米であり、品質センサが籾の水分を検出するものである場合、内蔵穀粒タンクに貯留された籾の水分または当該籾に要求される乾燥度がその貯留量とともに通信モジュールを通じて外部の乾燥施設に送信されると好都合である。そのような情報を受け取った乾燥施設は、処理籾が搬入される前に、乾燥装置の動作パラメータを適切に設定しておくことができる。逆に、乾燥施設から、穀物乾燥機の収容状況や乾燥機内穀物の含水率を収穫機側に送信することも好都合である。このように収穫機と乾燥施設との間で双方向通信して、互いの作業データを交換しあうことで、互いにより効果的な作業を行うことができる。 If the crop is rice and the quality sensor detects the moisture of the straw, the moisture of the straw stored in the built-in grain tank or the dryness required for the straw along with the amount of storage is externally determined through the communication module. Conveniently sent to the drying facility. The drying facility that has received such information can appropriately set the operating parameters of the drying device before the processing basket is carried in. On the other hand, it is also convenient to transmit the storage status of the grain dryer and the moisture content of the grain in the dryer to the harvester side from the drying facility. In this way, by performing two-way communication between the harvester and the drying facility and exchanging each other's work data, more effective work can be performed.
本発明の具体的な実施形態を説明する前に、本発明の農作管理システムの基本的な仕組みを説明する。図1は農作管理システムの基本的な構成を示す。図2は農作管理システムにおける情報の流れを示す。 Before describing specific embodiments of the present invention, the basic mechanism of the farming management system of the present invention will be described. FIG. 1 shows a basic configuration of a farm management system. FIG. 2 shows the flow of information in the farm management system.
ここでの農作業では、農作物収穫機(以下単に収穫機と略称する)1の直線走行と180度旋回走行を繰り返して作業対象農地全域の収穫作業が行われる。農作物収穫機1には、農作管理センタの管理コンピュータシステムとの間でデータ通信可能な端末コンピュータ(以下端末と略称する)3が装備されている。この端末3は、収穫機1に固定されたものでもよいし、タブレットコンピュータやスマートフォンのような携帯機器でクレードルなどを介して収穫機1に接続されるようなものでもよい。 In the farming work here, the harvesting work is performed on the entire farmland to be worked by repeating the linear traveling and the 180-degree turning traveling of the crop harvester (hereinafter simply referred to as a harvesting machine) 1. The
収穫機1には、作業対象の農地で収穫された農作物の収穫量を測定する収穫量センサ21と、収穫された農作物の品質を測定する品質センサ22が備えられている。収穫量センサ21の測定結果と品質センサ22の測定結果は端末3に送られる。 The harvesting
端末3には、現在位置、つまり自機位置を測定する測位モジュール30が備えられている。測位モジュール30としては、GPSモジュールとして知られ、タブレットコンピュータやスマートフォンに内蔵されているものを利用することができる。測位モジュール30が備えられていない端末3が用いられる場合には、収穫機1に測位モジュール30が装備される。また、この測位モジュール30はカーナビゲーションに用いられているものと実質的に同じであるので、これを流用することも可能である。 The
いずれにせよ、端末3には、農地情報生成部31と農作物情報生成部32と送信情報管理部33と通信モジュール34とが備えられている。農地情報生成部31は測位モジュール30の測定結果から収穫作業位置を示す収穫位置データを生成する。この収穫位置データは、作業対象農地を特定する農地名称または農地IDとともに農地情報に組み込まれる。もちろん収穫位置データだけで農地を特定することは可能なので、農地名称または農地IDは必須ではない。農作物情報生成部32は、収穫量センサ21の測定結果から収穫量データを生成するとともに、品質センサ22の測定結果から品質データを生成する。収穫量データ及び品質データは農作物情報として取り扱われる。送信情報管理部33は生成された農地情報と農作物情報とを収穫位置で関係づけて送信情報を作成する。通信モジュール34は送信情報を農作管理センタの農作管理コンピュータシステムに送る。 In any case, the
農作管理コンピュータシステムは、入出力サーバ4とアプリケーションサーバ5とデータベースサーバ6とを備えている。入出力サーバ4には、端末3から受け取った送信情報に含まれている農地情報と農作物情報とをアプリケーションサーバ5やデータベースサーバ6に転送するデータ入力部41が含まれている。アプリケーションサーバ5には、前記農地情報と前記農作物情報とに基づいて前記農地の農作評価を行う農作評価部51と、農作評価の結果を図表化するための図表化処理部52とが含まれている。データベースサーバ6には、一次データベース61と農作評価データベース部62と農地地図データベース部63が含まれている。一次データベース61は、収穫機1から送られてきた農地情報と農作物情報とを互いの関連付けを維持しながら記録または読み出すことができる、ソースデータの格納部として機能する。農作評価データベース部62は、農作評価部51によって行われた農地毎の農作評価やその農作評価を図表化した図表データの格納部として機能する。農地地図データベース部63は、基本的には一般的な地図データベースと同じであるが、農地に特有の属性データ、例えば土壌特性や水はけ特性などを含ませることができる地図データベースである。 The farm management computer system includes an input / output server 4, an application server 5, and a
入出力サーバ4に含まれているデータ出力部42は、農地評価部51で生成された農作評価データやその農作評価データをグラフィック化ないしは図表化した図表データを、端末3やこの農作管理システムに登録されているその他の端末にリクエストに応じて送信する。そのような図表データに基づいて端末3のディスプレイに表示される画面の一例が図3に示されている。この図例では、農地情報に関するものを表示する農地情報表示欄8Aが画面上部に配置され、農作物情報に関するものを表示する農作物情報表示欄8Bが画面下部に配置されている。 The
農地情報表示欄8Aには、農地を特定するための農地ID81、農地名称(町名や通称など)82、農地面積83、農地地図84が含まれている。農地地図84における各農地は、平均収穫量や平均食味値などの品質を表す基準値に対する比較で識別化(色分けやパターン分け)することができる。農作物情報表示欄8Bには、農作物の種類(例えばコシヒカリ)85、収穫量(農地全体または単位面積当たり)86、農作物の品質値87が含まれている。ここでは米作が扱われているので、農作物の品質値87として、玄米の平均タンパク量87aと平均水分量87bが表示されている。 The farmland
このような農作評価データに基づく図表を画面で、あるいはプリントアウトして見ることで、農地の状況が一目で把握することができる。 By viewing a chart based on such farming evaluation data on a screen or by printing it out, the situation of the farmland can be grasped at a glance.
次に、図面を用いて、本発明による農作管理システムの具体的な実施形態の1つを説明する。ここでは収穫機1はクローラ式の自脱型コンバイン1であり、図4はコンバイン1の側面図であり、走行機構はエンジンによって回転駆動されるクローラ走行装置11を備えており、前部に刈取部12、中間部に運転室13、後部に脱穀装置14と穀粒タンク15を備えている。模式的にしか示されていないが、穀粒タンク15の下部に穀粒の重量を検出する収穫量センサ21が装備され、穀粒タンク15の内部に、品質センサ22の一例である食味計(食味センサユニット)22が装備されている。食味計22からは、品質データとして穀粒の水分値とタンパク値の測定データが出力される。 Next, one specific embodiment of the farm management system according to the present invention will be described with reference to the drawings. Here, the harvesting
図5は運転室13の内部空間を概略的に示す模式図である。運転室13には、運転席16、各種操縦レバー、操作スイッチ、メータ表示パネルなどが配置されている。この実施形態では、端末3は、ポータブルなタブレット型コンピュータで構成されている。従って、この端末3は、運転席16の近くに設けられている端末用装着部3Aに装着して用いられる。この装着部3Aは、端末3のための給電接続部及びデータ交換接続部として機能する。なお、このタブレット型コンピュータに代えてスマートフォンを採用することができる。 FIG. 5 is a schematic diagram schematically showing the internal space of the
この端末3には、測位モジュール30として機能するGPSモジュールと、携帯電話回線を介してインターネットに接続可能な通信モジュール34とが搭載されている。また、農地情報生成部31、農作物情報生成部32、送信情報管理部33として機能するアプリケーションがインストールされている。従って、装着部3Aを介して、収穫量センサ21からの収穫量データ、食味計からの水分値データやタンパク値データが端末3に送られる。さらに、装着部3Aを介して、コンバイン1の各種ECUから内部データも端末に送られる。 The
このコンバイン1は、収穫作業対象となる所定の農地に投入されると、農地を走行しながら、連続的に刈り取り処理と脱穀処理を行う。その際、端末3のGPSモジュール30では、コンバイン1の現在位置を示す測位データ(緯度・経度)が生成され、実時刻と測位データとからなる測位情報が端末3に送られる。同時に、収穫量データと品質データ(穀粒の水分値及びタンパク値)も送られる。 When this
端末3の農地情報生成部31において、受け取った測位データは収穫作業位置を示す収穫位置データとなり、農地情報として取り扱われる。その際、緯度値と経度とからなる測位データを農地に設定された所定位置を原点とする座標系に変換して、収穫位置データをx座標値とy座標値とからなる位置データとすることができる。端末3の農作物情報生成部32では、受け取った収穫量データと品質データは農作物情報として取り扱われる。送信情報管理部33において、農地情報と農作物情報とは、後で農地における特定エリアと収穫量ないしは品質との関係を評価できるように関係付けられる。その際、収穫作業位置の測定時点とその位置で収穫された穀粒の品質測定の時間的なずれは、刈り取り処理と脱穀処理との時間を考慮して補正される。関係付けられた農地情報と農作物情報とは、送信情報として農作管理センタに送られるが、農地情報と農作物情報との関係付けは農作管理センタ側で行なわれても良い。 In the farmland
一般に、コンバイン1は、農地を直線走行と180°旋回の繰り返しによるジグザグ走行で収穫作業を行うので、農作物の収穫は実質的に直線な走行軌跡に沿って行なわれる。これに対して、農地の土壌品質の分布やその結果としての農作物の品質の分布は、面的な広がりを有する。このことから、作業対象となる農地を所定の大きさで分割して得られた微小区画毎に農作物情報(収穫量や品質)を微小区画毎に算定して、割り付けていくと好都合である。 In general, the
この収穫量:Dと品質:Qを農地の微小区画に割り当てる処理を簡単な例で説明する。図6は、その割り当て処理の模式図である。まず、農地が複数の微小区画:A1,A2,A3,・・・に区分けされる。コンバイン1の収穫走行にともなって、所定時間:t1,t2,t3,・・・毎に、または所定距離:D1,D2,D3,・・・毎に、収穫量データ及び品質データが入力されるので、その時間間隔における収穫量:V1,V2,V3,・・・と、その品質:Q1,Q2,Q3,・・・が取得される。
ここで、コンバイン1の収穫走行が微小区画:A1に属している時間ポイントを、t1,t6,t7とすると、微小区画:A1の収穫量:V[A1]は、
V[A1]=V1+V6+V7
となり、
微小区画:A1の平均品質:Q[A1]は、
Q[A1]=(Q1+Q6+Q7)/3
となる。
さらに、微小区画:A2に属している時間ポイントを、t2,t5,t8ととすると、微小区画:A2の収穫量:V[A2]は、
V[A2]=V2+V5+V8
となり、
微小区画:A2の平均品質:Q[A2]は、
Q[A2]=(Q2+Q5+Q8)/3
となる。このようにして、微小区画毎に農作物情報(収穫量や品質)を割り当てることができる。The process of assigning this yield: D and quality: Q to a small section of farmland will be described with a simple example. FIG. 6 is a schematic diagram of the assignment process. First, the farmland is divided into a plurality of small sections: A1, A2, A3,. As the
Here, when the time points at which the harvesting of the
V [A1] = V1 + V6 + V7
And
Minute section: Average quality of A1: Q [A1] is
Q [A1] = (Q1 + Q6 + Q7) / 3
It becomes.
Furthermore, if the time points belonging to the micro compartment: A2 are t2, t5, t8, the yield of the micro compartment: A2: V [A2] is
V [A2] = V2 + V5 + V8
And
Minute section: Average quality of A2: Q [A2] is
Q [A2] = (Q2 + Q5 + Q8) / 3
It becomes. In this way, crop information (amount of harvest and quality) can be assigned to each minute section.
図6で示した例では、畦等によって囲まれた農地を複数の微小区画に区分けした上で農作評価が農作評価部51で行われている。従って、その農作評価データは、そのような農地における収穫量や品質のミクロ評価を可能にする。しかしながら、町や村などの地域全体の農地を処理対象農地とし、畦等によって囲まれた農地を微小区画として取り扱って、農作評価を行うことが可能である。この場合の農作評価データは、地域全体の農地における収穫量や品質のマクロ評価を可能にする。 In the example shown in FIG. 6, the agricultural evaluation is performed by the
いずれにせよ、データベースサーバ6において、コンバイン1から送られてくる農地情報と農作物情報とは互いの関連付けを維持した状態で一次データベース部61に記録され、農作評価部51で生成された農作評価データは農作評価データベース部62に記録されている。従って、ユーザからのリクエストに応じて、特定の地域または農地の収穫量や品質に関する情報がユーザに与えられる。その際、図表化処理部52は、農地地図データベース部63に格納されている地図データを用いて、地図をベースとして収穫量や品質をマクロ的またはミクロ的に図表化したグラフィカルな情報を生成することができる。この実施形態では、入出力サーバ4は、Webサーバとして構築されている。Webサーバは、HTTP(HyperText Transfer Protocol)と呼ばれる通信プロトコルを用いて、端末3にインストールされているWebブラウザとの間でデータの送受信を行う。互いのデータの送受信のために、HTML(HyperText Markup Language)やXML(Extensible Markup Language)などによって記述された文書が用いられるが、その文書には画像や音声、さらには何らかの処理を行うプログラムを含ませることができる。 In any case, in the
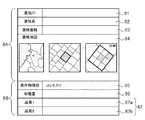
HTMLファイルやXMLファイルではグラフィカルなイメージを簡単に扱うことができる。図7には、端末3のWebブラウザによって表示される農作評価画面の一例が示されている。この農作評価画面のトップ画面は、畦で境界付けられた多数の農地を含む地域の地図である。各農地は、色分けされており、その内訳は、選択によって変更可能である。第1の選択では、農地は収穫作業の作業完了農地と作業未完農地とで色分けされている。第2の選択では、農地は、目標収穫量以上の農地と目標収穫量未満の農地とで色分けされている。さらに、品質に関して、例えば、目標タンパク値に達した農地と達しない農地とで色分けすることも可能である。 HTML files and XML files can easily handle graphical images. FIG. 7 shows an example of a farming evaluation screen displayed by the Web browser of the
図7のトップ画面において、特定の農地ZZZをクリックすることによりその農地ZZZに関する、農地情報と農作物情報、さらにオプションとしての農作業機情報を表示するサブウインドウが示されている。ここでは、農地情報には、農地名、面積、作物、作業進捗、肥料(種別や量)、農薬(種別や量)が含まれており、農作物情報には、玄米収穫量、平均タンパク、平均水分が含まれている。なお、農作業機情報には、消費燃料、作業時間、エンジンセット回転数、最高水温、平均作業速度が含まれている。この農作業機情報は、コンバイン1のECUから端末3に転送され、さらにこの農作管理コンピュータシステムに送られてデータベースサーバ6に記録されたものである。図7のトップ画面には、さらに農作管理センタに登録されている農作業機1の現在位置を示すアイコンも表示されている。 In the top screen of FIG. 7, by clicking on a specific farmland ZZZ, a sub-window is displayed that displays farmland information and crop information about the farmland ZZZ, and optional agricultural machine information. Here, the farmland information includes farmland name, area, crop, work progress, fertilizer (type and amount), and pesticide (type and amount). The crop information includes brown rice yield, average protein, average Contains moisture. The agricultural machine information includes fuel consumption, work time, engine set speed, maximum water temperature, and average work speed. The farm machine information is transferred from the ECU of the
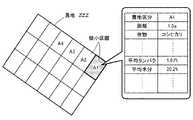
図8には、図7のトップ画面で示された多数の農地から選択された特定の農地ZZZが示されており、この農地ZZZは所定の大きさで分割して得られた多数の微小区画から構成されている。つまり、図7のトップ画面における地域全体が図8における1つの選択された特定の農地ZZZに対応しており、図7のトップ画面における多数の農地が図8における微小区画に対応している。従って、図8の画面上で特定の微小区画A1をクリックすることにより、その微小区画A1に関する、農地情報と農作物情報が表示される。この情報に基づいて、精密な農作管理が可能となる。 FIG. 8 shows a specific farmland ZZZ selected from a large number of farmlands shown on the top screen of FIG. 7, and this farmland ZZZ is divided into a large number of small sections obtained by dividing the farmland ZZZ into a predetermined size. It is composed of That is, the entire area on the top screen in FIG. 7 corresponds to one selected specific farmland ZZZ in FIG. 8, and a number of farmlands on the top screen in FIG. 7 correspond to minute sections in FIG. 8. Therefore, by clicking a specific minute section A1 on the screen of FIG. 8, farmland information and crop information about the minute section A1 are displayed. Based on this information, precise farming management becomes possible.
上述した実施形態では、農作物の収穫量及び品質のサンプリングは作業走行位置単位で行なっていたが、本発明はこれに限定されるわけではない。例えば、畦で囲まれた1つの農地単位でもよい。さらには、収穫機1には、収穫物を一時的に貯蔵しておく収穫物タンクが備えられているので(例えば、コンバインの場合には収穫物タンクとして穀粒タンクが備えられている)、収穫物タンクの容量を1単位として農作物の収穫量や品質のサンプリングを行なってもよい。 In the embodiment described above, the crop yield and quality are sampled in units of work travel positions, but the present invention is not limited to this. For example, it may be one farmland unit surrounded by fences. Furthermore, since the
また穀粒タンク15の容量よりさらに小さな容量単位でサンプリングを行なうための好適な実施形態の1つは、穀粒タンク15の内部に収穫物の一時貯留部を設けることである。つまり、一時貯留部の底に開閉蓋機構を設けるとともに、この一時貯留部の満杯を検知するセンサ、静電容量型近接センサを設け、一時貯留部が満杯になる毎に開閉蓋を開放して収穫量を穀粒タンク15に排出する。その排出の際に品質センサ22による品質測定を行い、結品質データを取得することができる。一時貯留部が満杯になる時間とその時間における平均車速とを測定することで、一時貯留部が満杯になるまでの走行距離が得られる。この走行距離は収穫量の指標(収穫量指標)として用いることができる。あるいは、走行距離当たりの収穫量つまり農地単位面積当たりの収穫量を求めることもできる。このようにして得られる収穫量または品質あるいはその両方に関する指標を地図上で視覚化することにより、農地の微小区域単位の収穫量マップを作成することができる。 One of the preferred embodiments for performing sampling in a capacity unit smaller than the capacity of the
端末3としてスマートフォンやタブレットコンピュータが採用されている場合、これらの機器には大抵WiFi機能やブルーツース(商標名)などの近距離通信機能が備えられているので、この端末3を収穫機1の特定操作のためのリモコンとして利用することができる。特に、収穫機1がコンバインの場合、コンバインに装備されているアンローダの昇降、左右旋回、穀粒排出のON/OFFを端末3の操作でコントロールできると便利である。さらに、コンバインのECUと端末3との双方向データ通信機能を利用して、アンローダの現在位置に応じてリモコンによる操作を規定することも可能である。例えば、アンローダが収納位置にある場合には、機体後方に反時計回りで張り出し、それ以外であれば自動収納を行うといった操作ボタンを端末3に付与することができる。このような端末3におけるリモコン機能は、アプリによって実現される。 When a smartphone or a tablet computer is adopted as the
本発明は、米、麦、とうもろこしなどの穀物収穫のみならず、ジャガイモ、ニンジン、大根などの野菜収穫、さらには林檎や蜜柑などの果物収穫の分野にも適用可能である。さらに、本発明は、クローラ式の自脱型コンバインのみあらず、普通型のコンバインにも、また、ホイール式のコンバインにも適用可能である。 The present invention is applicable not only to the harvesting of grains such as rice, wheat and corn, but also to the field of harvesting vegetables such as potatoes, carrots and radishes, and fruit harvesting such as apples and tangerines. Furthermore, the present invention is applicable not only to a crawler-type self-removing combine but also to an ordinary combine and a wheel-type combine.
1:農作物収穫機(コンバイン)
3:コンピュータ端末(端末)
21:収穫量センサ
22:品質センサ(食味計,食味センサユニット)
30:測位モジュール
31:農地情報生成部
32:農作物情報生成部
33:送信情報管理部
34:通信モジュール
4:入出力サーバ(Webサーバ)
41:データ入力部
42:データ出力部
5:アプリケーションサーバ
51:農作評価部
52:図表化処理部
6:データベースサーバ
61:一次データベース部
62:農作評価データベース部
63:農地地図データベース部1: Agricultural crop harvester (combine)
3: Computer terminal (terminal)
21: Yield sensor 22: Quality sensor (taste meter, taste sensor unit)
30: Positioning module 31: Farmland information generation unit 32: Agricultural product information generation unit 33: Transmission information management unit 34: Communication module 4: Input / output server (Web server)
41: Data input unit 42: Data output unit 5: Application server 51: Farming evaluation unit 52: Chart processing unit 6: Database server 61: Primary database unit 62: Farming evaluation database unit 63: Farmland map database unit
Claims (9)
Translated fromJapanese前記農地情報として収穫作業位置を示す収穫位置データと、前記農作物情報として前記農地で収穫された農作物の収穫量を示す収穫量データ及びその品質を示す品質データとを、前記農作物収穫機から受け取るデータ入力部と、
前記農地情報と前記農作物情報とを互いに関連付け可能に記録するデータベースサーバと、
前記農地情報と前記農作物情報とに基づいて前記農地の農作評価を行う農作評価部と、
前記農作評価部によって生成された農作評価データを送り出すデータ出力部と、
を備えた農作管理システム。A farm management system for managing farmland information on farmland on which harvesting work is performed by a crop harvesting machine and crop information on farmland obtained by the harvesting work,
Data received from the crop harvester as harvest position data indicating the harvesting work position as the farmland information, yield data indicating the yield of the crop harvested on the farmland and quality data indicating the quality as the crop information. An input section;
A database server that records the farmland information and the crop information so as to be associated with each other;
A farming evaluation unit for performing farming evaluation of the farmland based on the farmland information and the crop information;
A data output unit for sending out the agricultural evaluation data generated by the agricultural evaluation unit;
Farm management system with
自機位置を測定する測位モジュールと、
前記農地で収穫された農作物の収穫量を測定する収穫量センサと、
前記農地で収穫された農作物の品質を測定する品質センサと、
前記測位モジュールの測定結果から収穫作業位置を示す収穫位置データを前記農地情報として生成する農地情報生成部と、
前記収穫量センサの測定結果から収穫量データを前記農作物情報として生成するとともに、前記品質センサの測定結果から品質データを前記農作物情報として生成する農作物情報生成部と、
前記農地情報と前記農作物情報とを関係付けて送信情報を作成する送信情報管理部と、
前記送信情報を前記農作管理コンピュータシステムに送る通信モジュールと、
を備えた農作物収穫機。A crop harvesting machine that sends farmland information about farmland on which harvesting work is performed and crop information about crops obtained by the harvesting work to a farm management computer system,
A positioning module that measures its own position,
A yield sensor for measuring the yield of the crop harvested on the farmland;
A quality sensor for measuring the quality of the crops harvested on the farmland;
A farmland information generating unit for generating harvesting position data indicating a harvesting work position from the measurement result of the positioning module as the farmland information;
A crop information generation unit that generates crop data as the crop information from the measurement result of the crop sensor, and generates quality data as the crop information from the measurement result of the quality sensor;
A transmission information management unit that creates transmission information by associating the farmland information and the crop information;
A communication module for sending the transmission information to the farm management computer system;
Crop harvester equipped with.
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012213253AJP6116173B2 (en) | 2012-09-26 | 2012-09-26 | Farm management system |
| PCT/JP2013/074251WO2014050524A1 (en) | 2012-09-26 | 2013-09-09 | Agricultural management system and crop harvester |
| EP13841972.6AEP2902957A4 (en) | 2012-09-26 | 2013-09-09 | AGRICULTURAL MANAGEMENT SYSTEM AND HARVESTER |
| KR1020157010145AKR102318141B1 (en) | 2012-09-26 | 2013-09-09 | Agricultural management system and crop harvester |
| CN201380056138.7ACN104769631A (en) | 2012-09-26 | 2013-09-09 | Agricultural management system and crop harvester |
| US14/431,098US10410149B2 (en) | 2012-09-26 | 2013-09-09 | Agricultural work management system and agricultural crop harvester |
| US16/531,196US10685304B2 (en) | 2012-09-26 | 2019-08-05 | Agricultural work management system and agricultural crop harvester |
| US16/869,685US10885481B2 (en) | 2012-09-26 | 2020-05-08 | Agricultural work management system and agricultural crop harvester |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012213253AJP6116173B2 (en) | 2012-09-26 | 2012-09-26 | Farm management system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016230222ADivisionJP2017102924A (en) | 2016-11-28 | 2016-11-28 | Farm management system and crop harvester |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014067308Atrue JP2014067308A (en) | 2014-04-17 |
| JP6116173B2 JP6116173B2 (en) | 2017-04-19 |
Family
ID=50743619
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012213253AActiveJP6116173B2 (en) | 2012-09-26 | 2012-09-26 | Farm management system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6116173B2 (en) |
Cited By (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016171749A (en)* | 2015-03-16 | 2016-09-29 | 株式会社クボタ | Combine |
| JP2017077193A (en)* | 2015-10-19 | 2017-04-27 | 井関農機株式会社 | Grain harvesting drying system |
| JP2017104037A (en)* | 2015-12-08 | 2017-06-15 | ヤンマー株式会社 | Stalk counting system and farming management system including the same |
| KR20170129093A (en) | 2015-03-16 | 2017-11-24 | 가부시끼 가이샤 구보다 | Grain management system and combine |
| CN107409547A (en)* | 2017-06-02 | 2017-12-01 | 南京农业大学 | A kind of intelligent seeding operation system based on big-dipper satellite |
| JP2018000009A (en)* | 2016-06-27 | 2018-01-11 | 株式会社クボタ | Combine |
| JP2018014028A (en)* | 2016-07-22 | 2018-01-25 | 株式会社サタケ | Operation auxiliary system of grain treatment facility and automatic operation control method of satellite facility |
| JP2018038271A (en)* | 2015-12-25 | 2018-03-15 | 株式会社クボタ | Kernel yield management system for combine |
| JP2018042524A (en)* | 2016-09-16 | 2018-03-22 | 株式会社トプコン | Fertilization amount information management device, fertilization amount information management device control method, and fertilization amount information management program |
| JP2018042523A (en)* | 2016-09-16 | 2018-03-22 | 株式会社トプコン | Growth information management device, control method for growth information management device, and growth information management program |
| WO2019003851A1 (en) | 2017-06-26 | 2019-01-03 | 株式会社クボタ | Farm field map generation system |
| JP2019082764A (en)* | 2017-10-27 | 2019-05-30 | 株式会社日本総合研究所 | Information processing system and program |
| JP2019128661A (en)* | 2018-01-22 | 2019-08-01 | 株式会社クボタ | Agriculture support system |
| JP2019192139A (en)* | 2018-04-27 | 2019-10-31 | 株式会社クボタ | Agricultural management system |
| CN110602943A (en)* | 2016-12-21 | 2019-12-20 | 布兰斯顿有限公司 | System and method for monitoring crops |
| WO2020039859A1 (en)* | 2018-08-23 | 2020-02-27 | キヤノン株式会社 | Information processing apparatus, information processing method, and program |
| JP2020056569A (en)* | 2019-12-11 | 2020-04-09 | 井関農機株式会社 | Remote control system for grain dryer |
| CN110996652A (en)* | 2017-08-30 | 2020-04-10 | 洋马株式会社 | Harvesting operation area determination device |
| WO2020158605A1 (en) | 2019-01-30 | 2020-08-06 | 株式会社トプコン | Grain measuring device, combine, field management system |
| WO2021020113A1 (en)* | 2019-07-31 | 2021-02-04 | キヤノン株式会社 | Agricultural crop cultivation support system and agricultural crop cultivation method |
| US10945368B2 (en) | 2015-12-25 | 2021-03-16 | Kubota Corporation | Combine harvester and grain yield management system for combine harvester |
| JP2021063653A (en)* | 2021-01-28 | 2021-04-22 | 井関農機株式会社 | Remote management system for grain dryer |
| JP2022085453A (en)* | 2020-11-27 | 2022-06-08 | 三菱マヒンドラ農機株式会社 | combine |
| CN114946377A (en)* | 2022-04-21 | 2022-08-30 | 潍柴雷沃重工股份有限公司 | Grass growth state monitoring method and system of mower |
| JP2022168628A (en)* | 2021-04-26 | 2022-11-08 | ヤンマーホールディングス株式会社 | Agricultural information management method, agricultural information management system, and agricultural information management program |
| CN117882558A (en)* | 2024-02-04 | 2024-04-16 | 武汉盛硕电子有限公司 | Grain full reminder device based on high-precision material level sensor |
| JP7478066B2 (en) | 2020-08-24 | 2024-05-02 | ヤンマーホールディングス株式会社 | Work management system, work management method, and work management program |
| JP7525381B2 (en) | 2020-11-30 | 2024-07-30 | 三菱マヒンドラ農機株式会社 | combine |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3500551B2 (en) | 1995-10-12 | 2004-02-23 | 澄子 山本 | Short leg orthosis |
| KR102589076B1 (en) | 2017-06-23 | 2023-10-16 | 가부시끼 가이샤 구보다 | harvest |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1153674A (en)* | 1997-08-07 | 1999-02-26 | Kubota Corp | Information management system for farm product |
| JP2002189772A (en)* | 2000-12-20 | 2002-07-05 | Yanmar Agricult Equip Co Ltd | Cultivation plot selection system for crops |
| US7047133B1 (en)* | 2003-01-31 | 2006-05-16 | Deere & Company | Method and system of evaluating performance of a crop |
| JP2006246845A (en)* | 2005-03-14 | 2006-09-21 | Yanmar Co Ltd | Combine |
- 2012
- 2012-09-26JPJP2012213253Apatent/JP6116173B2/enactiveActive
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1153674A (en)* | 1997-08-07 | 1999-02-26 | Kubota Corp | Information management system for farm product |
| JP2002189772A (en)* | 2000-12-20 | 2002-07-05 | Yanmar Agricult Equip Co Ltd | Cultivation plot selection system for crops |
| US7047133B1 (en)* | 2003-01-31 | 2006-05-16 | Deere & Company | Method and system of evaluating performance of a crop |
| JP2006246845A (en)* | 2005-03-14 | 2006-09-21 | Yanmar Co Ltd | Combine |
Cited By (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102650521B1 (en)* | 2015-03-16 | 2024-03-25 | 가부시끼 가이샤 구보다 | Grain management system and combine |
| KR20170129093A (en) | 2015-03-16 | 2017-11-24 | 가부시끼 가이샤 구보다 | Grain management system and combine |
| JP2016171749A (en)* | 2015-03-16 | 2016-09-29 | 株式会社クボタ | Combine |
| US10278329B2 (en) | 2015-03-16 | 2019-05-07 | Kubota Corporation | Grain management system and combine |
| JP2017077193A (en)* | 2015-10-19 | 2017-04-27 | 井関農機株式会社 | Grain harvesting drying system |
| JP2017104037A (en)* | 2015-12-08 | 2017-06-15 | ヤンマー株式会社 | Stalk counting system and farming management system including the same |
| JP2018038271A (en)* | 2015-12-25 | 2018-03-15 | 株式会社クボタ | Kernel yield management system for combine |
| US10945368B2 (en) | 2015-12-25 | 2021-03-16 | Kubota Corporation | Combine harvester and grain yield management system for combine harvester |
| JP2018000009A (en)* | 2016-06-27 | 2018-01-11 | 株式会社クボタ | Combine |
| WO2018016512A1 (en)* | 2016-07-22 | 2018-01-25 | 株式会社サタケ | Operation assistance system for grain processing facility, and automatic operation control method for satellite facility |
| JP2018014028A (en)* | 2016-07-22 | 2018-01-25 | 株式会社サタケ | Operation auxiliary system of grain treatment facility and automatic operation control method of satellite facility |
| JP2018042524A (en)* | 2016-09-16 | 2018-03-22 | 株式会社トプコン | Fertilization amount information management device, fertilization amount information management device control method, and fertilization amount information management program |
| JP2018042523A (en)* | 2016-09-16 | 2018-03-22 | 株式会社トプコン | Growth information management device, control method for growth information management device, and growth information management program |
| CN110602943B (en)* | 2016-12-21 | 2023-08-15 | 蜂巢创新有限公司 | Systems and methods for monitoring crops |
| CN110602943A (en)* | 2016-12-21 | 2019-12-20 | 布兰斯顿有限公司 | System and method for monitoring crops |
| CN107409547A (en)* | 2017-06-02 | 2017-12-01 | 南京农业大学 | A kind of intelligent seeding operation system based on big-dipper satellite |
| CN107409547B (en)* | 2017-06-02 | 2023-08-11 | 南京农业大学 | Intelligent seeding operation system based on Beidou satellite |
| KR102593355B1 (en) | 2017-06-26 | 2023-10-25 | 가부시끼 가이샤 구보다 | Pavement map generation system |
| KR20200019848A (en) | 2017-06-26 | 2020-02-25 | 가부시끼 가이샤 구보다 | Pavement map generation system |
| CN110622200A (en)* | 2017-06-26 | 2019-12-27 | 株式会社久保田 | Farmland map generation system |
| CN110622200B (en)* | 2017-06-26 | 2023-10-27 | 株式会社久保田 | Farmland map generation system |
| WO2019003851A1 (en) | 2017-06-26 | 2019-01-03 | 株式会社クボタ | Farm field map generation system |
| EP3648045A4 (en)* | 2017-06-26 | 2021-03-24 | Kubota Corporation | SYSTEM FOR GENERATING MAPS OF AGRICULTURAL FIELDS |
| US11589508B2 (en) | 2017-06-26 | 2023-02-28 | Kubota Corporation | Field map generating system |
| CN110996652A (en)* | 2017-08-30 | 2020-04-10 | 洋马株式会社 | Harvesting operation area determination device |
| JP2019082764A (en)* | 2017-10-27 | 2019-05-30 | 株式会社日本総合研究所 | Information processing system and program |
| JP7144145B2 (en) | 2018-01-22 | 2022-09-29 | 株式会社クボタ | Agricultural support system |
| JP2019128661A (en)* | 2018-01-22 | 2019-08-01 | 株式会社クボタ | Agriculture support system |
| JP2019192139A (en)* | 2018-04-27 | 2019-10-31 | 株式会社クボタ | Agricultural management system |
| JP7055697B2 (en) | 2018-04-27 | 2022-04-18 | 株式会社クボタ | Agricultural management system |
| JP7250457B2 (en) | 2018-08-23 | 2023-04-03 | キヤノン株式会社 | Information processing device, information processing method and program |
| JP2020030668A (en)* | 2018-08-23 | 2020-02-27 | キヤノン株式会社 | Information processing apparatus, information processing method and program |
| WO2020039859A1 (en)* | 2018-08-23 | 2020-02-27 | キヤノン株式会社 | Information processing apparatus, information processing method, and program |
| JP2020120594A (en)* | 2019-01-30 | 2020-08-13 | 株式会社トプコン | Grain measuring apparatus, combine-harvester and field management system |
| WO2020158605A1 (en) | 2019-01-30 | 2020-08-06 | 株式会社トプコン | Grain measuring device, combine, field management system |
| JP7294567B2 (en) | 2019-01-30 | 2023-06-20 | 株式会社トプコン | Grain measuring devices, combines and field management systems |
| AU2020216817B2 (en)* | 2019-01-30 | 2023-04-27 | Topcon Corporation | Grain measuring device, combine, field management system |
| WO2021020113A1 (en)* | 2019-07-31 | 2021-02-04 | キヤノン株式会社 | Agricultural crop cultivation support system and agricultural crop cultivation method |
| JP2020056569A (en)* | 2019-12-11 | 2020-04-09 | 井関農機株式会社 | Remote control system for grain dryer |
| JP7478066B2 (en) | 2020-08-24 | 2024-05-02 | ヤンマーホールディングス株式会社 | Work management system, work management method, and work management program |
| JP2022085453A (en)* | 2020-11-27 | 2022-06-08 | 三菱マヒンドラ農機株式会社 | combine |
| JP7558041B2 (en) | 2020-11-27 | 2024-09-30 | 三菱マヒンドラ農機株式会社 | combine |
| JP7525381B2 (en) | 2020-11-30 | 2024-07-30 | 三菱マヒンドラ農機株式会社 | combine |
| JP2021063653A (en)* | 2021-01-28 | 2021-04-22 | 井関農機株式会社 | Remote management system for grain dryer |
| JP7056772B2 (en) | 2021-01-28 | 2022-04-19 | 井関農機株式会社 | Remote control system for grain dryers |
| JP2022168628A (en)* | 2021-04-26 | 2022-11-08 | ヤンマーホールディングス株式会社 | Agricultural information management method, agricultural information management system, and agricultural information management program |
| JP7662399B2 (en) | 2021-04-26 | 2025-04-15 | ヤンマーホールディングス株式会社 | Agricultural information management method, agricultural information management system, and agricultural information management program |
| CN114946377A (en)* | 2022-04-21 | 2022-08-30 | 潍柴雷沃重工股份有限公司 | Grass growth state monitoring method and system of mower |
| CN117882558A (en)* | 2024-02-04 | 2024-04-16 | 武汉盛硕电子有限公司 | Grain full reminder device based on high-precision material level sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6116173B2 (en) | 2017-04-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6116173B2 (en) | Farm management system | |
| WO2014050524A1 (en) | Agricultural management system and crop harvester | |
| JP2017102924A (en) | Farm management system and crop harvester | |
| US20250307957A1 (en) | Updating Execution Of Tasks Of An Agricultural Prescription | |
| Bochtis et al. | Advances in agricultural machinery management: A review | |
| JP6025390B2 (en) | Agricultural work support system | |
| JP6363579B2 (en) | Field management system | |
| KR102214682B1 (en) | Farm work machine, farm work management method, farm work management program, and recording medium recording farm work management program | |
| JP5944805B2 (en) | Combine and combine management system | |
| WO2014050525A1 (en) | Ground work vehicle, ground work vehicle management system, and ground work information display method | |
| JP6735690B2 (en) | Grain harvester | |
| JP6588603B2 (en) | Field management system | |
| JP6088880B2 (en) | Grain harvester | |
| JP2016218949A (en) | Display apparatus | |
| Andrade-Sanchez et al. | Yield monitoring technology for irrigated cotton and grains in Arizona: hardware and software selection | |
| JP7101647B2 (en) | Grain harvester | |
| JP2015049864A (en) | Agricultural support system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20140925 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20160105 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20160304 | |
| A02 | Decision of refusal | Free format text:JAPANESE INTERMEDIATE CODE: A02 Effective date:20160830 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20161128 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A821 Effective date:20161129 | |
| A911 | Transfer to examiner for re-examination before appeal (zenchi) | Free format text:JAPANESE INTERMEDIATE CODE: A911 Effective date:20161221 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20170221 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20170321 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:6116173 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 |