JP2013117809A - Safety driving support information distribution system and information collection vehicle - Google Patents
Safety driving support information distribution system and information collection vehicleDownload PDFInfo
- Publication number
- JP2013117809A JP2013117809AJP2011264312AJP2011264312AJP2013117809AJP 2013117809 AJP2013117809 AJP 2013117809AJP 2011264312 AJP2011264312 AJP 2011264312AJP 2011264312 AJP2011264312 AJP 2011264312AJP 2013117809 AJP2013117809 AJP 2013117809A
- Authority
- JP
- Japan
- Prior art keywords
- information
- dangerous event
- occurrence
- vehicle
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Traffic Control Systems (AREA)
Abstract
Description
Translated fromJapanese本発明は、安全運転支援情報配信システムおよび情報収集用車両に関するものである。 The present invention relates to a safe driving support information distribution system and an information collection vehicle.
安全運転の支援のために、道路における危険地点や危険対象物等について注意喚起用の支援情報を運転者に知らせることは好ましいものである。特許文献1には、道路の状況等の情報を的確かつ迅速に収集するため、一般の運転者から情報収集として、GPS付きの携帯情報端末やカーナビゲーション装置を利用するものが開示されている。また、特許文献2には、携帯情報端末のGPS情報から、歩行者の位置を特定して、歩行者との接触事故にならないように運転者に警告するものが開示されている。 In order to support safe driving, it is preferable to inform the driver of support information for alerting a dangerous point or a dangerous object on the road. Japanese Patent Application Laid-Open No. 2004-228561 discloses a method using a portable information terminal with a GPS or a car navigation device as information collection from a general driver in order to collect information such as road conditions accurately and quickly. Japanese Patent Application Laid-Open No. 2004-26883 discloses a technique for identifying the position of a pedestrian from GPS information of a portable information terminal and warning the driver so as not to cause a contact accident with the pedestrian.
ところで、車両の走行中に、ある地点でヒヤリとしたりハッとしたりする状況が多発することがある(以下の説明で、ヒヤリとしたりハッとしたりすることを「ヒヤリハット」と称する)。最近では、ヒヤリハットに関する情報を実地検分によって収集するために、センサやカメラ等を搭載したプローブカーと呼ばれるヒヤリハット情報収集用の車両を多数走行させることが行われている。 By the way, when the vehicle is traveling, there are cases where there are many situations where the vehicle is near or distracted at a certain point (in the following description, “approach or disappointment” is referred to as “near-miss”). Recently, in order to collect information related to near-miss by field inspection, a number of near-hat information collection vehicles called probe cars equipped with sensors, cameras and the like have been run.
事故を含むヒヤリハットが生じた原因を知ることは、注意喚起するための支援情報をより精度よく生成する上で極めて有効である。そして、ヒヤリハットを生じた原因として、ヒヤリハットの周囲にある歩行者や二輪車等の移動体の動きが大きく関与している場合が多々ある。この一方、センサやカメラ等を用いたプローブカーが収集するヒヤリハットに関するデータは大まかなものとならざるを得ず、詳細なデータを収集するには限界があり、ヒヤリハットを生じさせた原因となる情報を迅速かつ網羅的に収集することには事実上限界がある。 Knowing the cause of a near-miss that includes an accident is extremely effective in generating support information for alerting more accurately. And as a cause of the occurrence of a near-miss, there are many cases where the movement of a moving body such as a pedestrian or a two-wheeled vehicle around the near-miss is greatly involved. On the other hand, near-miss data collected by probe cars using sensors, cameras, etc. must be rough, and there is a limit to collecting detailed data, and information that causes near-miss There are practical limitations to quickly and comprehensively collecting data.
本発明は以上のような事情を勘案してなされたもので、その第1の目的は、ヒヤリハットを生じた原因となる詳細な情報を迅速かつ網羅的に得られるようにした安全運転支援情報配信システムを提供することにある。また、本発明の第2の目的は、上記安全運転支援情報配信システムに用いて好適な情報収集用車両を提供することにある。 The present invention has been made in view of the above circumstances, and a first object of the present invention is to provide safe driving support information distribution that can quickly and comprehensively obtain detailed information that causes a near-miss. To provide a system. A second object of the present invention is to provide an information collection vehicle suitable for use in the safe driving support information distribution system.
前記第1の目的を達成するため、本発明にあっては、基本的に、ヒヤリハットのような危険事象を生じた際には、その地点の周囲にある移動体が保有する携帯情報端末から移動体の動作状況に関する詳細な情報を得るようにして、ヒヤリハットを生じさせた詳細な原因を迅速かつ網羅的に収集できるようにしてある。具体的には、次のような解決手法を採択してある。すなわち、請求項1に記載のように、
危険事象が発生したことを検出する危険事象検出手段と、
前記危険事象検出手段によって危険事象が検出されたとき、危険事象発生地点の周囲に存在する移動体が有する携帯情報端末に対して、危険事象発生前後での該移動体の動きに関する動作情報の提供を指令する情報提供指令手段と、
前記携帯情報端末から提供された動作情報を入手する情報取得手段と、
前記情報取得手段により取得された動作情報に基づいて、危険事象の発生に関与した可能性のある情報を特定する情報特定手段と、
前記情報特定手段により特定された情報を類型化してデータベースとして登録する登録手段と、
前記登録手段に登録された情報に基づいて、支援を受ける車両に対して注意喚起のための支援情報を配信する情報配信手段と、
を備えているようにしてある。上記解決手法によれば、危険事象が生じたときに、その周囲に存在する移動体の詳細な動作状況を、この移動体が保有する携帯情報端末から迅速かつ網羅的に得ることになる。これにより、危険事象の発生の原因となる情報をより精度よく特定して、注意喚起のための支援情報をより精度のよいものにすることができる。In order to achieve the first object, according to the present invention, basically, when a dangerous event such as a near-miss occurs, a mobile information terminal held by a mobile body around the point moves. By obtaining detailed information on the state of movement of the body, it is possible to quickly and comprehensively collect the detailed causes that caused the near-miss. Specifically, the following solutions have been adopted. That is, as described in
A dangerous event detection means for detecting that a dangerous event has occurred;
When a dangerous event is detected by the dangerous event detection means, operation information relating to the movement of the moving object before and after the occurrence of the dangerous event is provided to a portable information terminal held by the moving object around the dangerous event occurrence point. Information provision command means for commanding,
Information acquisition means for obtaining operation information provided from the portable information terminal;
Based on the operation information acquired by the information acquisition means, information specifying means for specifying information that may have been involved in the occurrence of a dangerous event;
Registration means for categorizing the information specified by the information specifying means and registering it as a database;
Based on the information registered in the registration means, information distribution means for distributing support information for alerting vehicles receiving support;
It is supposed to be equipped with. According to the above solution, when a dangerous event occurs, the detailed operation status of the mobile object existing in the vicinity thereof can be obtained quickly and comprehensively from the portable information terminal held by the mobile object. As a result, the information that causes the occurrence of the dangerous event can be specified with higher accuracy, and the support information for alerting can be made more accurate.
上記解決手法を前提とした好ましい態様は、特許請求の範囲における請求項2以下に記載のとおりである。すなわち、
前記情報特定手段は、危険事象発生前後での前記移動体の動きを解析して、危険事象に関与した移動体を特定する、ようにしてある(請求項2対応)。この場合、歩行者や二輪車等の移動体が危険事象発生の原因となることが多いが、この危険事象の原因となった移動体を特定して、その後の支援情報に役立てることができる。A preferred mode based on the above solution is as described in
The information specifying means analyzes the movement of the moving body before and after the occurrence of the dangerous event, and specifies the moving body involved in the dangerous event (corresponding to claim 2). In this case, a moving object such as a pedestrian or a motorcycle often causes the occurrence of a dangerous event. However, the moving object causing the dangerous event can be identified and used for subsequent support information.
前記情報特定手段は、危険事象発生前後での前記移動体の加速度の変化が緩やかなものに関しては危険事象の対象として特定しない、ようにしてある(請求項3対応)。この場合、危険事象の発生に関与しない移動体を排除して、危険事象の発生に関与した移動体を特定するための負担軽減等の上で好ましいものとなる。 The information specifying means does not specify that the change in acceleration of the moving body before and after the occurrence of the dangerous event is slow as a target of the dangerous event (corresponding to claim 3). In this case, it is preferable in reducing the burden for identifying the moving body involved in the occurrence of the dangerous event by excluding the moving body not involved in the occurrence of the dangerous event.
前記情報取得手段が、前記移動体の動作情報を時系列データとして取得し、
前記情報特定手段は、前記時系列データを解析して、危険事象発生と同タイミングで挙動が変化した移動体を危険事象の発生に関与した可能性のある移動体として特定する、
ようにしてある(請求項4対応)。この場合、危険事象の発生に関与した移動体の特定を時系列データを利用して精度よく特定する上で好ましいものとなる。The information acquisition means acquires the movement information of the moving body as time series data,
The information specifying means analyzes the time series data and specifies a moving body whose behavior has changed at the same timing as the occurrence of the dangerous event as a moving body that may have been involved in the occurrence of the dangerous event.
(Corresponding to claim 4). In this case, it is preferable to specify the moving body involved in the occurrence of the dangerous event with high accuracy using time series data.
前記登録手段は、移動体に関する速度および移動方向に関する情報と合わせて、危険事象発生地点に関する情報を登録する、ようにしてある(請求項5対応)。この場合、危険事象発生地点と危険事象の発生に関与する可能性のある移動体の速度および移動方向とをデータベースとして登録して、より効果的な支援情報を配信することができる。 The registering means registers information related to the dangerous event occurrence point together with information related to the speed and moving direction related to the moving body (corresponding to claim 5). In this case, the dangerous event occurrence point and the speed and moving direction of the moving body that may be involved in the occurrence of the dangerous event are registered as a database, and more effective support information can be distributed.
危険事象発生時の位置が、周囲に歩行者の存在しないエリアであるときは、前記情報提供指令手段による情報提供の指令を行わないようにされている、ようにしてある(請求項6対応)。この場合、車両側では危険事象の原因として特定しにくい一方、危険事象の発生原因となる可能性の高い歩行者の存在が無視できる状況のときは、むやみに情報提供指令を行わないようにして、制御系の負担軽減の上で好ましいものとなる。 When the position at the time of the occurrence of the dangerous event is an area where no pedestrians are present in the vicinity, the information provision instruction means is not instructed to provide information (corresponding to claim 6). . In this case, while it is difficult to identify the cause of the dangerous event on the vehicle side, if the existence of a pedestrian who is highly likely to cause the dangerous event is negligible, do not give the information provision command unnecessarily. This is preferable in reducing the burden on the control system.
情報収集用車両に、前記危険事象検出手段と前記情報提供指令手段と前記情報取得手段と前記情報特定手段とが設けられ、
情報配信センターに、前記登録手段と情報配信手段とが設けられている、
ようにしてある(請求項7対応)。この場合、車両側と情報配信する側との制御負担を適切に分担させて、一方の負担が過度に大きくなってしまう事態を防止する上で好ましいものとなる。The information collection vehicle is provided with the dangerous event detection means, the information provision command means, the information acquisition means, and the information identification means,
The information distribution center is provided with the registration unit and the information distribution unit.
(Corresponding to claim 7). In this case, it is preferable to appropriately share the control burden between the vehicle side and the information delivery side and to prevent a situation in which one burden becomes excessively large.
前記第2の目的を達成するため、本発明における情報収集用車両にあっては次のような解決手法を採択してある。すなわち、特許請求の範囲における請求項8に記載のように
危険事象が発生したことを検出する危険事象検出手段と、
前記危険事象検出手段によって危険事象が検出されたとき、危険事象発生地点の周囲に存在する移動体が有する携帯情報端末に対して、危険事象発生前後での該移動体の動きに関する動作情報の提供を指令する情報提供指令手段と、
前記携帯情報端末から提供された動作情報を入手する情報取得手段と、
前記情報取得手段により取得された動作情報に基づいて、危険事象の発生に関与した可能性のある情報を特定する情報特定手段と、
前記情報特定手段により特定された情報を情報配信センターに送信する送信手段と、
を備えているようにしてある。上記解決手法によれば、請求項7の解決手法で用いて好適な車両が提供される。In order to achieve the second object, the following solution is adopted in the information collecting vehicle in the present invention. That is, a dangerous event detection means for detecting the occurrence of a dangerous event as described in claim 8 in the claims,
When a dangerous event is detected by the dangerous event detection means, operation information relating to the movement of the moving object before and after the occurrence of the dangerous event is provided to a portable information terminal held by the moving object around the dangerous event occurrence point. Information provision command means for commanding,
Information acquisition means for obtaining operation information provided from the portable information terminal;
Based on the operation information acquired by the information acquisition means, information specifying means for specifying information that may have been involved in the occurrence of a dangerous event;
Transmitting means for transmitting the information specified by the information specifying means to an information distribution center;
It is supposed to be equipped with. According to the above solution, a vehicle suitable for use in the solution of claim 7 is provided.
本発明によれば、危険事象が発生した際に、その周囲に存在する危険事象発生の原因となる詳細な情報を迅速かつ網羅的に得て、注意喚起のための支援情報をより精度よいものにする等の上で好ましいものとなる。 According to the present invention, when a dangerous event occurs, detailed information that causes the dangerous event occurring around it can be quickly and comprehensively obtained, and support information for alerting can be obtained with higher accuracy. For example, it is preferable.
まず、図1を参照しつつ、全体の概要について説明する。CTは、安全のための運転支援情報を、運転支援を受ける車両Vに対して配信する情報配信センターである。この情報配信センターCTには、実地検分によって情報収集を行う多数のプローブカーV1,V2により得られた各種情報が入力される。プローブカーV1は、主として道路環境データを得るものであり、道路環境を最新のものに更新するために用いられる。また、プローブカーV1は、車両動態データを併せて収集するものとなっており、例えば、車両の発進・停止時や、一定の時間、あるいは一定の走行距離等で、車両の位置や状態(動態)を収集するもので、簡易データの収集でよいため台数が極めて多いものである。プローブカーV1は、当支持孔された無線通信手段を介して、収集した情報を情報配信センターCTへ送信する。 First, an overall outline will be described with reference to FIG. The CT is an information distribution center that distributes driving support information for safety to the vehicle V that receives driving support. Various information obtained by a large number of probe cars V1 and V2 that collect information by on-site inspection is input to the information distribution center CT. The probe car V1 mainly obtains road environment data, and is used to update the road environment to the latest one. The probe car V1 also collects vehicle dynamics data. For example, the position and state of the vehicle (dynamics) when the vehicle starts and stops, at a fixed time, or at a fixed travel distance. ), And since it is sufficient to collect simple data, the number of units is extremely large. The probe car V1 transmits the collected information to the information distribution center CT via the wireless communication means supported by the support hole.
前記プローブカーV2は、高機能のデータ収集用となるもので、上記道路環境や動態データの他に、ヒヤリハットが発生した前後の詳細な車両挙動、運転者の操作、動画像等を収集するものとなっている。このプローブカーV2で得られたデータは、実際に事故やヒヤリハットが生じた危険地点を特定するもので、危険発生形態やその場所の道路環境等の情報も合わせて入手されることになる。プローブカーV2は、高機能のため、プローブカーV1に比して、走行台数は少ないものとなる。また、プローブカーV2は、ヒヤリハットが発生した時点で、例えば半径30m前後程度に存在する車両、二輪車、歩行者等の移動体が保有する携帯情報端末から、後述する詳細なデータを収集する。このため、プローブカーV2は、無線通信手段を有して、周囲の携帯情報端末に対して、情報提供するように指令する機能と、携帯情報端末から送信されてくる情報を受信する機能と、受信したデータを後述のようにデータ化して情報配信センターCTへ送信する機能とを有する。具体的には、プローブカーV2は、収集したデータからヒヤリハットに関与した可能性の高い対象物を特定した対象物データ11とヒヤリハットを生じたときの自車のデータ12とを紐付けして(対応させて)、情報配信センターCTへ送信する。 The probe car V2 is used for collecting high-performance data, and collects detailed vehicle behaviors before and after the occurrence of a near-miss, driver operations, moving images, etc. in addition to the road environment and dynamic data. It has become. The data obtained by this probe car V2 identifies the dangerous point where the accident or near-miss actually occurred, and information such as the form of danger occurrence and the road environment at that location is also obtained. Since the probe car V2 has a high function, the number of traveling vehicles is smaller than that of the probe car V1. The probe car V2 collects detailed data, which will be described later, from a portable information terminal held by a moving body such as a vehicle, a two-wheeled vehicle, or a pedestrian that exists at a radius of about 30 m when a near-miss occurs. For this reason, the probe car V2 has a wireless communication means, a function to instruct surrounding portable information terminals to provide information, a function to receive information transmitted from the portable information terminal, The received data is converted into data as described later and transmitted to the information distribution center CT. Specifically, the probe car V2 links the
支援情報を受ける車両Vは、運転者の特性を記憶したドライバデータベース21を生成して記憶している。また、常時自車の状況を自車データ22として生成して、情報配信センターCTへ送信する。車両Vは、さらに、支援要否判断システム23を生成して記憶している。情報配信センターCTから、危険地点と危険発生形態に関する情報が送信されてきたとき、支援要否判断システム23が、ドライバデータベース21と照合して、車両Vの運転者の特性からして支援が必要であると判断したときに、情報配信センターCTからの支援情報を運転者に報知する(例えばナビゲーション装置を利用した画面表示and/or音声報知)。 The vehicle V that receives the support information generates and stores a driver database 21 that stores the characteristics of the driver. Moreover, the state of the own vehicle is always generated as
情報配信センターCTの機能について概略を説明すると、次のとおりである。まず、プローブカーV2で得られる情報(対象物データ11と自車データ12)に基づいて、ヒヤリハットデータベース1を生成して記憶(登録)する。また、プローブカーV1、V2から送信されたデータに基づいて、道路環境データベース2を記憶(登録)、更新している。さらに、ヒヤリハットを生じた危険地点とその発生形態とを対応づけた危険地点・発生形態別データベース3を生成して記憶(登録)している。車両Vが、危険地点・発生形態別データベース3に登録されている危険地点に近づき、かつ車両Vの運転状況(ハンドル操作状況、速度、加減速度、進行方向等)が危険地点・発生形態データベース3に登録されている危険発生形態と同一あるいは類似(近似)しているときに、車両Vに対して、危険地点に近づいていることと危険発生形態に関する情報を車両Vに送信する。 The outline of the function of the information distribution center CT will be described as follows. First, the near-
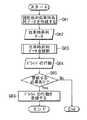
次に、図2以下を参照しつつ、プローブカーV2、情報配信センターCT、車両Vが行う制御の詳細について説明する。まず、図2を参照しつつ、プローブカーV2で行われる制御例について説明する。なお、以下の説明でQはステップを示す。図2は、プローブカーV2において、事故を含むヒヤリハットが記録トリガにかかったときにスタートされるが、記録トリガとしては、例えば、急ハンドル操作、急ブレーキ、運転者の心拍数増大、衝撃感知等とされる。Q1の後、ヒヤリハット発生前後(例えばヒヤリハットの前後10秒間)における自車状況(操作状況、車両状況)の時系列データが生成、記憶される。 Next, details of the control performed by the probe car V2, the information distribution center CT, and the vehicle V will be described with reference to FIG. First, an example of control performed by the probe car V2 will be described with reference to FIG. In the following description, Q indicates a step. FIG. 2 is started when a near-miss including an accident is triggered by a recording trigger in the probe car V2. Examples of the recording trigger include sudden steering operation, sudden braking, increase in driver's heart rate, impact detection, and the like. It is said. After Q1, time series data of the host vehicle situation (operation situation, vehicle situation) before and after the occurrence of a near-miss (for example, 10 seconds before and after the near-miss) is generated and stored.
Q3の後、Q4において、プローブカーV2と周辺に存在する携帯情報端末とが通信可能であるか否かが判別される。このQ4の判別は、周辺の携帯情報端末に対して、情報提供指令を送信して、携帯情報端末から返信があるか否かをみることにより判断される。このQ4の判別でYESのときは、Q5において、携帯情報端末から送信されてく情報を入手(受信)する。この後、Q6において、入手した情報が、ヒヤリハット発生前後での時系列データとされる。この後、Q7において、Q6での時系列データが後述のようにして解析される。なお、携帯情報端末から送信される情報としては、例えば、
携帯情報端末の保有者のID(年齢、性別等)、速度、加減速度、位置等とされる。After Q3, at Q4, it is determined whether or not the probe car V2 and the portable information terminals existing in the vicinity can communicate with each other. This determination of Q4 is determined by transmitting an information provision command to surrounding portable information terminals and checking whether there is a reply from the portable information terminal. If YES in Q4, information transmitted from the portable information terminal is obtained (received) in Q5. Thereafter, in Q6, the obtained information is time-series data before and after the occurrence of a near-miss. Thereafter, in Q7, the time series data in Q6 is analyzed as described later. In addition, as information transmitted from a portable information terminal, for example,
The ID (age, gender, etc.), speed, acceleration / deceleration, position, etc. of the owner of the portable information terminal.
Q7の後、Q8において、Q7の解析の結果から、ヒヤリハットの発生が確認できるか否かが判別される。このQ8の判別でYESのときは、ヒヤリハットの対象物が特定できるか否かが判別される。このQ8の判別でYESのときは、Q10において、対象者のデータが作成される。このた後、Q11において、対象者データ11(図1参照)に記憶された後、終了される。なお、作成された対象者データ11は、無線通信によって情報配信センターに送信されるものである。 After Q7, at Q8, it is determined from the analysis result of Q7 whether or not the occurrence of a near-miss can be confirmed. If the determination in Q8 is YES, it is determined whether or not the near-miss target object can be specified. If the determination in Q8 is YES, data for the subject is created in Q10. After this, in Q11, after being stored in the subject data 11 (see FIG. 1), the process is terminated. The created
前記Q8の判別でNOのときは、Q12において、ヒヤリハットの発生対象の絞り込みが行われる。この後、Q13において、発生形態が過去の発生形態と共通であるか否かが判別される。このQ13の判別でNOのときは、Q14において、新たな発生形態が特定される。この後、特定された発生形態がQ15において発生形態データAとして登録された後、終了される。前記Q9の判別でNOのとき、あるいはQ13の判別でYESのときは、そのまま終了される。なお、Q15で作成された発生形態データベースは、無線通信によって情報配信センターCTに送信される。 When the determination in Q8 is NO, narrowing down of near-miss occurrence targets is performed in Q12. Thereafter, in Q13, it is determined whether or not the generation form is common with the past generation form. When the determination in Q13 is NO, a new generation form is specified in Q14. Thereafter, the identified generation form is registered as generation form data A in Q15, and then the process is terminated. If NO in Q9 or YES in Q13, the process is terminated as it is. The occurrence form database created in Q15 is transmitted to the information distribution center CT by wireless communication.
前記Q4の判別でNOのときは、Q16において、ヒヤリハット発生前後での自車の時系列データが解析される。この後、Q17において、操作あるいは判断のミスが特定できるか否かが判別される。このQ17の判別でYESのときは、Q18において、運転者単独でのヒヤリハットの発生であるとされる。この後、Q19において、ヒヤリハットの発生形態が特定される。この後、特定されたヒヤリハットの発生形態が発生形態データベースBに登録された後、終了される。前記Q17の判別でNOのときは、そのまま終了される。なお、Q20で作成された発生形態データベースは、無線通信によって情報配信センターCTへ送信される。 If the determination in Q4 is NO, the time series data of the vehicle before and after the occurrence of a near-miss is analyzed in Q16. Thereafter, in Q17, it is determined whether or not an operation or determination error can be specified. If the determination in Q17 is YES, it is determined in Q18 that a near-miss occurs in the driver alone. Thereafter, in Q19, the occurrence form of the near-miss is specified. Thereafter, after the identified near-miss occurrence mode is registered in the occurrence mode database B, the process is terminated. If the determination in Q17 is NO, the process ends as it is. The occurrence form database created in Q20 is transmitted to the information distribution center CT by wireless communication.
図3は、図1におけるヒヤリハットデータベース1の生成例を示すものである。すなわち、図2の発生形態データAと対象者データのそれぞれから紐付けしたデータを登録するためのもので、この両方の登録の処理を簡略化のために一括して示してある。具体的には、Q31〜Q35の処理が対象者データAについての紐付けしたデータの登録となり、Q36、Q36,、Q35の処理が発生形態データAについての紐付けしたデータの登録となる。 FIG. 3 shows an example of generation of the near-
以上のことを前提として、Q31において、対象者データ11が読み込まれた後、Q32において、発生形態に分類される。この後、Q33において、対象物データと発生形態とが対応付けられる。Q33の後、Q34において、Q33で設定された対応付けデータに対して、自車データ(図1の12対応)が紐付けられる。この後、Q35において、Q34で紐付けされたデータが登録される。一方、発生形態データベースAについては、まず、Q36において、発生形態データAが読み込まれる。この後、Q37において、Q36で読み込まれた発生形態データAについて、対象物データと自車データとが紐付けされる。この後、Q35の登録が行われる。なお、図2の発生形態データベース(対象物なしの運転者単独によるヒヤリハットに関するデータベース)についても、同様の処理によって、データベース化される(ただし、運転者単独でのヒヤリハットなので、対象物の紐付けなし)。 On the premise of the above, in Q31, after the
なお、危険発生形態としては、例えば、自車両の状態(直進中、右折中、右折発進時、左折中など)、交錯対象物(4輪車、2輪車、自転車、歩行者など)、自車両と交錯対象物との位置関係(先行、対向、右から、左からなど)等とされる。 For example, the state of danger occurrence includes, for example, the state of the own vehicle (straight, right turn, right turn, left turn, etc.), the object to be crossed (four-wheeled vehicle, two-wheeled vehicle, bicycle, pedestrian, etc.) The positional relationship between the vehicle and the object to be mixed (preceding, facing, from the right, from the left, etc.), etc.
図4は、情報配信センターCTにおける道路環境データベースの生成、更新の一例と示すものである。すなわち、Q41において、地図データベースとサーバ上で公開されている交通情報とが読み込まれた後、Q42において、読み込まれた情報に基づいて基準となる道路環境データベースが作成される。 FIG. 4 shows an example of generation and update of a road environment database in the information distribution center CT. That is, after the map database and the traffic information published on the server are read in Q41, a reference road environment database is created based on the read information in Q42.
Q42の後、Q43において、プローブカーV1、V2から送信される走行開始からのデータが受信されて、Q44において各プローブカーV1,V2ごとの需要者データが作成される。この後、Q45において、ショートトリップ毎(例えば100m毎や、交差点を通過する毎等)に、データが分類される。そして、Q46において、分類されたデータを基に、道路環境が分析される。 After Q42, in Q43, data from the start of traveling transmitted from the probe cars V1, V2 is received, and in Q44, consumer data for each probe car V1, V2 is created. Thereafter, in Q45, the data is classified for each short trip (for example, every 100 m or every time an intersection is passed). In Q46, the road environment is analyzed based on the classified data.
Q46の後、Q47において、Q42での道路環境データベースと、Q46で分析された道路環境とが比較される。この後、Q48において、道路環境について、追加したり更新すべき情報が存在するか否かが判別される。このQ48の判別でYESのときは、Q49において、道路環境がデータベース2の記憶内容が更新される。Q48の判別でNOのときは、道路環境に変更ないときなので、そのまま終了される。このようにして、道路環境データベース2の記憶内容が、常に最新のものに更新される。 After Q46, in Q47, the road environment database in Q42 is compared with the road environment analyzed in Q46. Thereafter, in Q48, it is determined whether there is information to be added or updated regarding the road environment. If the determination in Q48 is YES, the stored contents of the
道路環境データベース2に登録される道路環境は、例えば次のようなものとされる。
(1)単路部について
a.道路構造
通行帯(車線数、歩道、測路帯、2輪車通行帯の、中央分離帯)についての大まかな構造、道路形状(勾配や曲率)、周辺構造物(建物、地形)など。The road environment registered in the
(1) Single path part a. Road structure Rough structure, road shape (gradient and curvature), surrounding structures (buildings, landforms), etc. for traffic zones (number of lanes, sidewalks, survey zones, and two-wheeler traffic zones).
b.信号情報
押しボタン信号の有無や信号サイクル、予告信号の有無や信号サイクルなど。b. Signal information Presence / absence of push button signal and signal cycle, presence / absence of warning signal and signal cycle.
c.規制情報
規制速度(実勢速度)、脇道(非優先路)の有無など。
(2)交差点部について
a.道路構造
交差点形状(大きさ、接続方路数、各方路の接続角度、各方路の通行帯情報)、停止線位置、横断歩道の有無および位置、右折待ちの位置、道路形状(通過経路ごとの勾配、曲率)、周辺構造物(建物、地形)など。c. Regulation information Regulation speed (actual speed), presence / absence of side road (non-priority road), etc.
(2) About the intersection a. Road structure Intersection shape (size, number of connection routes, connection angle of each route, lane information of each route), stop line position, presence / absence and position of pedestrian crossing, right turn waiting position, road shape (passage route) Slope, curvature), surrounding structures (buildings, terrain), etc.
b.信号情報
信号有無、信号制御方式(固定サイクル、時間変動、感応式、中央制御など)、各信号パターン(歩行者信号の有無、歩車分離、右直分離、時差式)など。b. Signal information Signal presence / absence, signal control method (fixed cycle, time fluctuation, sensitive type, central control, etc.), each signal pattern (presence / absence of pedestrian signal, pedestrian separation, right separation, time difference type), etc.
c.規制情報
一時停止規制(信号なしのときで、一時停止が必要な場所であるか否かの区別)、進行方向規制、規制速度(実勢速度)など。c. Restriction information Suspension restriction (distinguishing whether a place where a pause is necessary when there is no signal), travel direction restriction, restriction speed (actual speed)
図5は、図1の危険地点・発生形態別データベース3の生成、更新の一例を示すものである。すなわち、Q51において、ヒヤリハットデータベース1と道路環境データベース2とから、本発明と多発地点のデータが取り出される。この後、Q52において、ヒヤリハット多発地点の道路環境データが読み込まれ、次いで、Q53においてヒヤリハットデータが読み込まれる。そして、Q54において、Q52とQ53で読み込まれた両方のデータが紐付けされる。 FIG. 5 shows an example of generation and updating of the dangerous point /
Q54の後、Q55において、ヒヤリハットの発生形態が分類される。この分類された一例が、図6に示される。図6の例では、あるヒヤリハット多発地点において、ヒヤリハット発生に関連する要因となる運転者の年齢および性別の他、発生形態、時間帯、天候等が紐付けられた状態で分類される。Q55の後、Q56において、Q55での分類、分析の結果、図6に示すようなデータを更新する必要があるか否かが判別される。このQ56の判別でYESのときは、Q57において、危険地点・発生形態別データベース3が更新される。Q56の判別でNOのときは、そのまま終了される。 After Q54, the occurrence pattern of near-miss is classified at Q55. An example of this classification is shown in FIG. In the example of FIG. 6, a certain incident location is classified according to the state of occurrence, time zone, weather, and the like in addition to the age and sex of the driver, which are factors related to the occurrence of the incident. After Q55, in Q56, it is determined whether or not the data shown in FIG. 6 needs to be updated as a result of the classification and analysis in Q55. If the determination in Q56 is YES, the dangerous spot /
図7は、支援を受ける車両Vにおけるドライバデータベース21の更新例を示すものである。すなわち、Q61において、現在地における自車の時系列データが作成されて、Q62においてこの時系列データが記憶される。この後、Q63において、上記時系列データが解析される。次いでQ64においてQ63での解析結果に基づいて、ドライバの行動が判断される。Q64の後、Q65において、Q64でのドライバの行動判断の結果から、ドライバデータベース21を更新する必要があるか否かが判別される。このQ65の判別でYESのときは、Q66において、ドライバデータベース21が更新される。Q65の判別でNOのときは、そのまま終了される。 FIG. 7 shows an example of updating the driver database 21 in the vehicle V that receives support. That is, in Q61, time series data of the vehicle at the current location is created, and in Q62, this time series data is stored. Thereafter, the time series data is analyzed in Q63. Next, in Q64, the driver's action is determined based on the analysis result in Q63. After Q64, at Q65, it is determined whether or not the driver database 21 needs to be updated from the result of the driver's behavior determination at Q64. If YES in Q65, the driver database 21 is updated in Q66. If NO in Q65, the process ends as it is.
ドライバデータベース21の一例が、図8に示される。この図8は、車両Vを運転するある乗員について、道路環境別に、運転の得手、不得手を分類したものとなっている。具体的には、図8の例では、道路タイプと、道路規模と、右折、左折等の行動と、時間帯と、支援判断の要否につながる得手、不得手の支援判断等が設定されている。情報配信センターCTから、支援情報を受信したとき、支援情報の内容が、図8の支援判断において苦手と分類された道路環境のときを条件として、車両Vの運転者に対して、情報配信センターCTからの支援情報が報知される。逆に、図8の支援判断において得意と分類されているときは、情報配信センターCTから支援情報を受信しても、車両Vの運転者に対しては支援情報を報知しないものとされる。図8のような道路環境別の分類は、運転機会の少ない運転者向けとして好適な設定となっている。 An example of the driver database 21 is shown in FIG. In FIG. 8, a certain occupant who drives the vehicle V is classified according to the road environment according to driving ability and poor ability. Specifically, in the example of FIG. 8, the road type, road size, actions such as right turn and left turn, time zone, and the strong and poor support judgment that lead to necessity of support judgment are set. Yes. When the support information is received from the information distribution center CT, the information distribution center is provided to the driver of the vehicle V on the condition that the content of the support information is a road environment classified as weak in the support determination of FIG. Support information from CT is notified. On the other hand, when it is classified as good in the support determination of FIG. 8, the support information is not notified to the driver of the vehicle V even if the support information is received from the information distribution center CT. The classification according to road environment as shown in FIG. 8 is suitable for a driver with few driving opportunities.
図9は、図8に対応したもので、地点別の分類となっている。すなわち、具体的な交差点の位置、道路規模、交差点への流入方向と流出方向、時間帯、支援判断等に分類されている。この図8に示すような分類態様は、物流用トラックやタクシー、通勤に車両を利用するもの等、長距離を走行する運転者向けの分類として好適となる。なお、一人の運転者について、図8のような道路環境別分類と図9に示すような地点別分類との両方を設定するようにしてもよい。図7のQ64までの処理は、図8,図9に示すような分類に追加、変更、削除する項目の有無のための情報を得るための処理となる。 FIG. 9 corresponds to FIG. 8 and is classified by location. That is, it is classified into specific intersection positions, road scales, inflow and outflow directions to intersections, time zones, support decisions, and the like. The classification mode as shown in FIG. 8 is suitable as a classification for drivers traveling long distances such as logistics trucks, taxis, and those using vehicles for commuting. For one driver, both the road environment classification as shown in FIG. 8 and the spot classification as shown in FIG. 9 may be set. The process up to Q64 in FIG. 7 is a process for obtaining information for the presence / absence of an item to be added, changed, or deleted to the classification as shown in FIGS.
図10は、情報配信センターCTと支援を受ける車両Vとの間で情報交換しつつ、車両Vへの支援情報を報知するか否かを判断する制御例を示す(図1の支援要否判断システムの制御例)。すなわち、Q71において、車両Vから情報配信センターCTに対して車両Vの自車データ(現在位置や速度、進行方向等)が送信され、この後、Q72において、送信した自車データに応じた危険地点・発生形態別データベースが入手される。次いで、Q73において、Q72で入手したデータとドライバデータベース21とが照合される。そして、Q74において、上記照合結果からして、車両Vの運転者にとってこれから通過する場所の危険性が大きいか(高いか)否かが判断される。このQ74の判別でYESのときは、Q75において、車両Vの運転者に対して注意喚起が行われる。Q74の判別でNOのときは、そのまま終了される。図10の処理は、つまるところ、これから通過する場所が、車両Vの運転者にとって不得手な状況であるときにのみ支援情報が報知(注意喚起)されることになり、不得手でない運転者に対して不必要に注意喚起されてしまう事態を防止あるいは抑制する上で好ましいものとなる。 FIG. 10 shows a control example for determining whether to notify support information to the vehicle V while exchanging information between the information distribution center CT and the vehicle V receiving the support (determination of necessity of support in FIG. 1). Example of system control). That is, in Q71, the vehicle V's own vehicle data (current position, speed, traveling direction, etc.) is transmitted from the vehicle V to the information distribution center CT, and thereafter, in Q72, the danger corresponding to the transmitted own vehicle data. A database by location / form is obtained. Next, in Q73, the data obtained in Q72 and the driver database 21 are collated. Then, in Q74, it is determined whether or not there is a high (high) risk of a place where the vehicle V will pass through based on the result of the collation. When the determination in Q74 is YES, the driver of the vehicle V is alerted in Q75. If the determination in Q74 is NO, the process ends as it is. After all, the processing of FIG. 10 is that the support information is notified (calls attention) only when the place to be passed is in a situation that is not good for the driver of the vehicle V. Therefore, it is preferable to prevent or suppress the situation where the user is unnecessarily alerted.
図11は、複数の携帯情報端末(符合A〜Dで区別してある)から送信された情報に基づいて、どの携帯情報端末を有する移動体が危険事象発生の原因となったかを特定するときの一例を示す。図11では、各携帯情報端末から、移動速度と心拍数と緯度(位置)とに関する情報が、ヒヤリハット発生時点前後の時系列データとして送信される。そして、結論的には、携帯情報端末Aを保有する移動体が生地の発生に関与した可能性が高いと判断される。すなわち、携帯情報端末Aを保有する移動体は、ヒヤリハットの発生時刻の直後に、急激に移動速度が低下し、しかも心拍数が大幅に増大している。これに対して、携帯情報端末Bについては、ヒヤリハット発生直後に移動速度が急激に低下しているものの、その後に移動速度が復活しており、しかも心拍数はヒヤリハット後もさほど増大しておらず、危険事象発生に関与した可能性が低いとされる。同様にして、携帯情報端末CやDを保有している移動体についても、危険事象発生に関与した可能性が低いと判断される。 FIG. 11 is a diagram for identifying which mobile information terminal has a mobile event that has caused a dangerous event based on information transmitted from a plurality of mobile information terminals (identified by reference signs A to D). An example is shown. In FIG. 11, information on the moving speed, heart rate, and latitude (position) is transmitted from each portable information terminal as time-series data before and after the occurrence of a near-miss. In conclusion, it is determined that there is a high possibility that the mobile object that holds the portable information terminal A is involved in the generation of the fabric. In other words, the mobile object that has the portable information terminal A has a rapid decrease in the moving speed and a significant increase in the heart rate immediately after the near-miss occurrence time. On the other hand, with regard to the portable information terminal B, although the moving speed has dropped sharply immediately after the occurrence of a near-miss, the speed of movement has revived after that, and the heart rate has not increased much after the near-miss. , The possibility that it was involved in the occurrence of dangerous events is low. Similarly, it is determined that there is a low possibility that the mobile object that holds the portable information terminals C and D is involved in the occurrence of the dangerous event.
なお、大まかな判断手法として、危険事象発生前後で挙動が大きく変化したものが危険事象の発生に関与している可能性が高く、危険事象発生前後での加速度の変化が緩やかものは危険事象の発生に関与している可能性が低いと判断することができる。また、速度と移動方向との両方を考慮して(パラメータとして)、危険事象の発生に関与した可能性があるか否かを判断することもできる。さらに、携帯情報端末を利用した情報収集は、プローブカーV2で収集しにくい車両以外、つまり二輪車や歩行者に限定することもでき、したがって、現在の走行位置が二輪車や歩行者の存在が考えられない高速道路や自動車専用道路等であるときは、携帯情報端末への情報提供指令を行わないようにすることもできる(制御の負担軽減)。 As a rough judgment method, it is highly likely that the behavior that has changed significantly before and after the occurrence of the dangerous event is involved in the occurrence of the dangerous event. It can be judged that the possibility of being involved in the occurrence is low. It is also possible to determine whether or not there is a possibility of being involved in the occurrence of a dangerous event in consideration of both the speed and the moving direction (as parameters). Furthermore, information collection using the portable information terminal can be limited to vehicles other than vehicles that are difficult to collect with the probe car V2, that is, two-wheeled vehicles and pedestrians. Therefore, the current traveling position may be the presence of two-wheeled vehicles and pedestrians. When there is no highway or automobile-only road, etc., it is possible to avoid giving an information provision command to the portable information terminal (reducing the control burden).
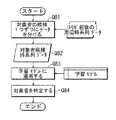
図12は、図11に示すような複数の携帯情報端末からの情報に基づいて、危険事象の発生に関与した移動体を特定するのに用いて好適な制御例を示す。すなわち、図12は、ヒヤリハットが発生したことをトリガとしてスタートされて、まずQ81において、複数の携帯情報端末から危険事象の発生に関与した可能性が考えられる候補それぞれについて、1つづつにデータが分けられる。この後、Q82において、対象候補の時系列データが生成される。次いで、Q83において、後述する学習モデルを利用して、Q82での時系列データから危険事象に関与した可能性の高い携帯情報端末(つまりこれを保有する移動体)が特定される。 FIG. 12 shows a control example suitable for use in identifying a mobile body involved in the occurrence of a dangerous event based on information from a plurality of portable information terminals as shown in FIG. That is, FIG. 12 is started with the occurrence of a near-miss as a trigger. First, in Q81, data is stored one by one for each candidate that may be involved in the occurrence of a dangerous event from a plurality of portable information terminals. Divided. Thereafter, in Q82, time-series data of target candidates is generated. Next, in Q83, using a learning model to be described later, a portable information terminal (that is, a mobile object that owns it) that is highly likely to be involved in the dangerous event is identified from the time-series data in Q82.
図13は、図12の制御で用いる学習モデルの設定例を示すものである。すなわち、Q91において、携帯情報端末から送信されてきたデータのうち、ヒヤリハット発生時ヒヤリハット発生時をトリガとしてその前後のデータのみが取り出される。この後、Q92において、上記トリガ前後のデータが時系列データとされる。次いで、Q93において、Q92での時系列データのフィルタリングが行われる(ノイズ除去)。 FIG. 13 shows a setting example of the learning model used in the control of FIG. That is, in Q91, out of the data transmitted from the portable information terminal, only the data before and after the near-miss occurrence is taken out as a trigger. Thereafter, in Q92, the data before and after the trigger is set as time series data. Next, in Q93, time-series data filtering in Q92 is performed (noise removal).
Q93の後、Q94において、抜き出したデータを特定の時間窓に区切り、特徴ベクトルを作成する。この後、Q96において、Q95で作成された特徴ベクトルについて、ロジスティック回帰、カーネル法、クラスター分析等の既知の手法を用いた機械学習ロジックを適用する。このQ96の処理の結果得られたモデルが、Q97において学習モデルとして設定される。なお、学習モデルは、初期時はある想定モデル(基本モデル)としてあらかじめ設定しておき、ヒヤリハット発生毎に図13の処理を行うことによって学習モデルを最適化することができる。 After Q93, in Q94, the extracted data is divided into specific time windows to create feature vectors. Thereafter, in Q96, machine learning logic using a known method such as logistic regression, kernel method, cluster analysis or the like is applied to the feature vector created in Q95. A model obtained as a result of the process of Q96 is set as a learning model in Q97. Note that the learning model can be set in advance as a certain assumed model (basic model) at the initial stage, and the learning model can be optimized by performing the processing of FIG. 13 every time a near-miss occurs.
図14は、情報配信センターCTにおいて、運転者毎に適した支援を行うため、車両Vの運転者の運転行動を道路環境別にモデル化する制御例を示し、図1のものにさらに付加的に行われる制御となる。具体的には、危険定点ドライバ運転モデルが設定され、この危険地点別の運転モデルは、図9のようなデータとなり、支援判断で苦手と判断された地点においてのみ支援対象とされる。 FIG. 14 shows a control example in which the driving behavior of the driver of the vehicle V is modeled according to the road environment in order to provide support suitable for each driver in the information distribution center CT. This is the control to be performed. Specifically, a risk fixed point driver driving model is set, and the driving model for each dangerous point becomes data as shown in FIG. 9 and is set as a support target only at a point that is determined to be weak in the support determination.
図14は、危険定点ドライバ運転モデルの設定、更新の制御例を示すものである。すなわち、Q101において、道路環境データベース2からヒヤリハット多発地点のデータが取り出されて、これがQ102において道路環境データとして設定される。この後、ヒヤリハットデータベース1から自車データが取り出されて、Q104において自車データとして設定される。Q104の後、Q105において、運転者個人データ、道路環境で層別を行って解析が行われる。この後Q106において、上記解析結果から、属性別に運転者の運転モデルが作成される。この後、Q107において、Q106で作成されたモデルを新たに更新するする必要があるか否かが判別される。このQ107の判別でYESのときは、Q108においてドライバ運転モデルを登録(更新)して、危険地点・ドライバ運転モデルとしてデータベース化される。危険地点・ドライバ運転モデルのデータベースを照合することにより、車両Vの運転者にとって危険地点であることを前提として、危険地点・発生形態別データベース3のデータに基づく支援情報の配信が車両Vに行われる。このような制御によって、ある運転者にとって危険地点であって支援情報が配信されても、別の運転者にとっては危険地点と判断されないで支援情報の配信が行われないようになり、支援情報の不必要な配信が防止あるいは抑制される。 FIG. 14 shows a control example of setting and updating of the risk fixed point driver operation model. That is, in Q101, the data of the near-miss frequent occurrence point is extracted from the
以上実施形態について説明したが、本発明は、実施形態に限定されるものではなく、特許請求の範囲の記載された範囲において適宜の変更が可能であり、例えば次のような場合をも含むものである。実地検分による事故やヒヤリハットに関する情報収集は、プローブカーを用いる以外に適宜の手法で行うことができ、例えば警察が有する実際に生じた事故のデータに基づく収集や、道路脇での検分者による長時間の観測データに基づく収集とすることもできる。フローチャートに記載された各ステップあるいはステップ群は、その機能に手段の名称を付して表現できるものである。図1に示す対象者データ11,自車データ12のいずれか一方あるいは両方を、情報配信センターCT側で処理するようにしてもよく(情報配信センターCTの集中制御)、また車両V2で収集された情報を情報配信センターCT側で紐付けする処理を行うようにしてもよい。勿論、本発明の目的は、明記されたものに限らず、実質的に好ましいあるいは利点として表現されたものを提供することをも暗黙的に含むものである。 Although the embodiment has been described above, the present invention is not limited to the embodiment, and can be appropriately changed within the scope described in the scope of claims. For example, the invention includes the following cases. . Information about accidents and near-miss incidents during field inspections can be collected by any appropriate method other than using a probe car. For example, collection based on actual accident data held by the police, It can also be collected based on time observation data. Each step or step group described in the flowchart can be expressed by adding the name of the means to the function. One or both of the
本発明は、車両の安全運転向上のために好適である。 The present invention is suitable for improving the safe driving of a vehicle.
V:車両(支援情報が配信される車両)
V2:プローブカー(動態情報とヒヤリハットの収集)
CT:情報配信センター
1:ヒヤリハットデータベース
2:道路環境データベース
3:危険地点・発生形態データベース
11:対象者データ
12:自車データ
21:ドライバデータベース
22:自車データ
23:支援要否判断システムV: Vehicle (vehicle to which support information is distributed)
V2: Probe car (collection of dynamic information and near-miss)
CT: Information distribution center 1: Near-miss database 2: Road environment database 3: Dangerous point / occurrence form database 11: Subject data 12: Own vehicle data 21: Driver database 22: Own vehicle data 23: Support necessity judgment system
Claims (8)
Translated fromJapanese前記危険事象検出手段によって危険事象が検出されたとき、危険事象発生地点の周囲に存在する移動体が有する携帯情報端末に対して、危険事象発生前後での該移動体の動きに関する動作情報の提供を指令する情報提供指令手段と、
前記携帯情報端末から提供された動作情報を入手する情報取得手段と、
前記情報取得手段により取得された動作情報に基づいて、危険事象の発生に関与した可能性のある情報を特定する情報特定手段と、
前記情報特定手段により特定された情報を類型化してデータベースとして登録する登録手段と、
前記登録手段に登録された情報に基づいて、支援を受ける車両に対して注意喚起のための支援情報を配信する情報配信手段と、
を備えていることを特徴とする安全運転支援情報配信システム。A dangerous event detection means for detecting that a dangerous event has occurred;
When a dangerous event is detected by the dangerous event detection means, operation information relating to the movement of the moving object before and after the occurrence of the dangerous event is provided to a portable information terminal held by the moving object around the dangerous event occurrence point. Information provision command means for commanding,
Information acquisition means for obtaining operation information provided from the portable information terminal;
Based on the operation information acquired by the information acquisition means, information specifying means for specifying information that may have been involved in the occurrence of a dangerous event;
Registration means for categorizing the information specified by the information specifying means and registering it as a database;
Based on the information registered in the registration means, information distribution means for distributing support information for alerting vehicles receiving support;
A safe driving support information distribution system characterized by comprising:
前記情報特定手段は、危険事象発生前後での前記移動体の動きを解析して、危険事象に関与した移動体を特定する、ことを特徴とする安全運転支援情報配信システム。In claim 1,
The information specifying means analyzes the movement of the moving body before and after the occurrence of the dangerous event, and specifies the moving body involved in the dangerous event, and provides a safe driving support information distribution system.
前記情報特定手段は、危険事象発生前後での前記移動体の加速度の変化が緩やかなものに関しては危険事象の対象として特定しない、ことを特徴とする安全運転支援情報配信システム。In claim 1 or claim 2,
The safe driving support information distribution system, wherein the information specifying means does not specify a thing with a gentle change in acceleration of the moving body before and after the occurrence of the dangerous event as a target of the dangerous event.
前記情報取得手段が、前記移動体の動作情報を時系列データとして取得し、
前記情報特定手段は、前記時系列データを解析して、危険事象発生と同タイミングで挙動が変化した移動体を危険事象の発生に関与した可能性のある移動体として特定する、
ことを特徴とする安全運転支援情報配信システム。In any one of Claims 1 thru | or 3,
The information acquisition means acquires the movement information of the moving body as time series data,
The information specifying means analyzes the time series data and specifies a moving body whose behavior has changed at the same timing as the occurrence of the dangerous event as a moving body that may have been involved in the occurrence of the dangerous event.
A safe driving support information distribution system characterized by that.
前記登録手段は、移動体に関する速度および移動方向に関する情報と合わせて、危険事象発生地点に関する情報を登録する、ことを特徴とする安全運転支援情報配信システム。In any one of Claims 1 thru | or 4,
The said registration means registers the information regarding a dangerous event occurrence point with the information regarding the speed and moving direction regarding a moving body, The safe driving assistance information delivery system characterized by the above-mentioned.
危険事象発生時の位置が、周囲に歩行者の存在しないエリアであるときは、前記情報提供指令手段による情報提供の指令を行わないようにされている、ことを特徴とする安全運転支援情報配信システム。In any one of Claims 1 thru | or 5,
Safe driving support information distribution, characterized in that when the dangerous event occurs in an area where there are no pedestrians in the surrounding area, the information providing instruction means is not instructed to provide information. system.
情報収集用車両に、前記危険事象検出手段と前記情報提供指令手段と前記情報取得手段と前記情報特定手段とが設けられ、
情報配信センターに、前記登録手段と情報配信手段とが設けられている、
ことを特徴とする安全運転支援情報配信システム。In any one of Claims 1 thru | or 6,
The information collection vehicle is provided with the dangerous event detection means, the information provision command means, the information acquisition means, and the information identification means,
The information distribution center is provided with the registration unit and the information distribution unit.
A safe driving support information distribution system characterized by that.
前記危険事象検出手段によって危険事象が検出されたとき、危険事象発生地点の周囲に存在する移動体が有する携帯情報端末に対して、危険事象発生前後での該移動体の動きに関する動作情報の提供を指令する情報提供指令手段と、
前記携帯情報端末から提供された動作情報を入手する情報取得手段と、
前記情報取得手段により取得された動作情報に基づいて、危険事象の発生に関与した可能性のある情報を特定する情報特定手段と、
前記情報特定手段により特定された情報を情報配信センターに送信する送信手段と、
を備えていることを特徴とする安全運転支援情報配信システムに用いる情報収集用車両。A dangerous event detection means for detecting that a dangerous event has occurred;
When a dangerous event is detected by the dangerous event detection means, operation information relating to the movement of the moving object before and after the occurrence of the dangerous event is provided to a portable information terminal held by the moving object around the dangerous event occurrence point. Information provision command means for commanding,
Information acquisition means for obtaining operation information provided from the portable information terminal;
Based on the operation information acquired by the information acquisition means, information specifying means for specifying information that may have been involved in the occurrence of a dangerous event;
Transmitting means for transmitting the information specified by the information specifying means to an information distribution center;
An information collecting vehicle for use in a safe driving support information distribution system.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011264312AJP2013117809A (en) | 2011-12-02 | 2011-12-02 | Safety driving support information distribution system and information collection vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011264312AJP2013117809A (en) | 2011-12-02 | 2011-12-02 | Safety driving support information distribution system and information collection vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013117809Atrue JP2013117809A (en) | 2013-06-13 |
Family
ID=48712350
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011264312APendingJP2013117809A (en) | 2011-12-02 | 2011-12-02 | Safety driving support information distribution system and information collection vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013117809A (en) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015155990A1 (en) | 2014-04-10 | 2015-10-15 | Toyota Jidosha Kabushiki Kaisha | Driving action classifying apparatus and driving action classifying method |
| WO2016170785A1 (en)* | 2015-04-21 | 2016-10-27 | パナソニックIpマネジメント株式会社 | Information processing system, information processing method, and program |
| JP2017004219A (en)* | 2015-06-09 | 2017-01-05 | 富士通株式会社 | Detection program, detection method, and detection apparatus |
| JP2017122995A (en)* | 2016-01-06 | 2017-07-13 | ホーチキ株式会社 | Disaster prevention information management system |
| WO2018105571A1 (en)* | 2016-12-09 | 2018-06-14 | 株式会社日立製作所 | Driving assistance information collection device |
| JP2020113334A (en)* | 2020-04-10 | 2020-07-27 | ホーチキ株式会社 | Disaster prevention information management system |
| US10759446B2 (en) | 2015-04-21 | 2020-09-01 | Panasonic Intellectual Property Management Co., Ltd. | Information processing system, information processing method, and program |
| US10793165B2 (en) | 2015-04-21 | 2020-10-06 | Panasonic Intellectual Property Management Co., Ltd. | Driving assistance method, and driving assistance device, driving control device, vehicle, driving assistance program, and recording medium using said method |
| JP2021135693A (en)* | 2020-02-26 | 2021-09-13 | 三菱ロジスネクスト株式会社 | Processing device, processing method, estimation system and program |
| JP2024039803A (en)* | 2022-09-12 | 2024-03-25 | Necプラットフォームズ株式会社 | Traffic accident prevention system, traffic accident prevention method, traffic accident prevention program, terminal, and cloud device |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007171154A (en)* | 2005-11-22 | 2007-07-05 | Equos Research Co Ltd | Driving assistance device |
| JP2008058031A (en)* | 2006-08-29 | 2008-03-13 | Sky Kk | Dash warning system |
| JP2010250667A (en)* | 2009-04-17 | 2010-11-04 | Sumitomo Electric Ind Ltd | Communication device and mobile phone |
| JP2011163125A (en)* | 2010-02-04 | 2011-08-25 | Fuji Heavy Ind Ltd | Driving behavior assistance system |
- 2011
- 2011-12-02JPJP2011264312Apatent/JP2013117809A/enactivePending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007171154A (en)* | 2005-11-22 | 2007-07-05 | Equos Research Co Ltd | Driving assistance device |
| JP2008058031A (en)* | 2006-08-29 | 2008-03-13 | Sky Kk | Dash warning system |
| JP2010250667A (en)* | 2009-04-17 | 2010-11-04 | Sumitomo Electric Ind Ltd | Communication device and mobile phone |
| JP2011163125A (en)* | 2010-02-04 | 2011-08-25 | Fuji Heavy Ind Ltd | Driving behavior assistance system |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10460598B2 (en) | 2014-04-10 | 2019-10-29 | Toyota Jidosha Kabushiki Kaisha | Driving action classifying apparatus and driving action classifying method |
| WO2015155990A1 (en) | 2014-04-10 | 2015-10-15 | Toyota Jidosha Kabushiki Kaisha | Driving action classifying apparatus and driving action classifying method |
| US10793165B2 (en) | 2015-04-21 | 2020-10-06 | Panasonic Intellectual Property Management Co., Ltd. | Driving assistance method, and driving assistance device, driving control device, vehicle, driving assistance program, and recording medium using said method |
| US10627813B2 (en) | 2015-04-21 | 2020-04-21 | Panasonic Intellectual Property Management Co., Ltd. | Information processing system, information processing method, and program |
| US11072343B2 (en) | 2015-04-21 | 2021-07-27 | Panasonic Intellectual Property Management Co., Ltd. | Driving assistance method, and driving assistance device, driving control device, vehicle, driving assistance program, and recording medium using said method |
| JP2017138952A (en)* | 2015-04-21 | 2017-08-10 | パナソニックIpマネジメント株式会社 | Information processing system, information processing method, and program |
| JP2017138953A (en)* | 2015-04-21 | 2017-08-10 | パナソニックIpマネジメント株式会社 | Information processing system, information processing method, and program |
| US10919540B2 (en) | 2015-04-21 | 2021-02-16 | Panasonic Intellectual Property Management Co., Ltd. | Driving assistance method, and driving assistance device, driving control device, vehicle, and recording medium using said method |
| JP6052530B1 (en)* | 2015-04-21 | 2016-12-27 | パナソニックIpマネジメント株式会社 | Information processing system, information processing method, and program |
| WO2016170785A1 (en)* | 2015-04-21 | 2016-10-27 | パナソニックIpマネジメント株式会社 | Information processing system, information processing method, and program |
| US10759446B2 (en) | 2015-04-21 | 2020-09-01 | Panasonic Intellectual Property Management Co., Ltd. | Information processing system, information processing method, and program |
| JP2017004219A (en)* | 2015-06-09 | 2017-01-05 | 富士通株式会社 | Detection program, detection method, and detection apparatus |
| JP2017122995A (en)* | 2016-01-06 | 2017-07-13 | ホーチキ株式会社 | Disaster prevention information management system |
| WO2018105571A1 (en)* | 2016-12-09 | 2018-06-14 | 株式会社日立製作所 | Driving assistance information collection device |
| JP2021135693A (en)* | 2020-02-26 | 2021-09-13 | 三菱ロジスネクスト株式会社 | Processing device, processing method, estimation system and program |
| JP7267221B2 (en) | 2020-02-26 | 2023-05-01 | 三菱ロジスネクスト株式会社 | Processing device, processing method, estimation system and program |
| JP2020113334A (en)* | 2020-04-10 | 2020-07-27 | ホーチキ株式会社 | Disaster prevention information management system |
| JP2024039803A (en)* | 2022-09-12 | 2024-03-25 | Necプラットフォームズ株式会社 | Traffic accident prevention system, traffic accident prevention method, traffic accident prevention program, terminal, and cloud device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2013117809A (en) | Safety driving support information distribution system and information collection vehicle | |
| KR102205240B1 (en) | Unexpected Impulse Change Collision Detector | |
| US10496889B2 (en) | Information presentation control apparatus, autonomous vehicle, and autonomous-vehicle driving support system | |
| JP6671554B1 (en) | Determining future heading using wheel attitude | |
| JP7098883B2 (en) | Vehicle control methods and equipment | |
| JP6605705B2 (en) | Method and apparatus for warning other traffic participants when a vehicle is running backwards | |
| JP6925796B2 (en) | Methods and systems, vehicles, and computer programs that assist the driver of the vehicle in driving the vehicle. | |
| JP6635428B2 (en) | Car peripheral information display system | |
| US20190039613A1 (en) | Apparatus and method for changing route of vehicle based on emergency vehicle | |
| US20130147955A1 (en) | Warning system, vehicular apparatus, and server | |
| JP2019184603A (en) | Method for operating autonomous driving vehicle and warning service, and system and machine-readable medium | |
| CN109983305A (en) | Vehicle display control unit, vehicle display control method and vehicle display control program | |
| JP6007739B2 (en) | Driving support device and driving support method | |
| JP7079069B2 (en) | Information presentation control device, self-driving car, and self-driving car driving support system | |
| KR20200047796A (en) | Semantic object clustering for autonomous vehicle decision making | |
| JP2003044994A (en) | Dangerous vehicle extraction device, dangerous vehicle information providing device, and program therefor | |
| JP2022543936A (en) | Automated crowdsourcing of road environment information | |
| JP5895728B2 (en) | Vehicle group management device | |
| JP2021530039A (en) | Anti-theft technology for autonomous vehicles to transport cargo | |
| JP2013080286A (en) | Moving body identification device and moving body information transmission device | |
| CN115497333A (en) | Control device, mobile body, control method, and computer-readable storage medium | |
| CN115457805A (en) | Control device, mobile body, control method, and computer-readable storage medium | |
| JP7449206B2 (en) | Communication control device, vehicle, program, and communication control method | |
| JP2023012649A (en) | vehicle controller | |
| WO2019127076A1 (en) | Automated driving vehicle control by collision risk map |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20141021 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20150617 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20150623 | |
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20150818 | |
| A02 | Decision of refusal | Free format text:JAPANESE INTERMEDIATE CODE: A02 Effective date:20160223 |