JP2012188104A - Method for operating vehicle moving device - Google Patents
Method for operating vehicle moving deviceDownload PDFInfo
- Publication number
- JP2012188104A JP2012188104AJP2011076524AJP2011076524AJP2012188104AJP 2012188104 AJP2012188104 AJP 2012188104AJP 2011076524 AJP2011076524 AJP 2011076524AJP 2011076524 AJP2011076524 AJP 2011076524AJP 2012188104 AJP2012188104 AJP 2012188104A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- carriage
- wheel
- leader
- follower
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Vehicle Cleaning, Maintenance, Repair, Refitting, And Outriggers (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
Translated fromJapanese本発明は、車両移動装置の運転方法に関するものである。 The present invention relates to a driving method of a vehicle moving device.
従来、任意の位置に停車した車両を駐車施設における所定位置に搬送できるようにした入出車装置の一般的技術水準を示すものとしては、例えば、特許文献1がある。 For example, Patent Document 1 shows a general technical level of an entry / exit device that can transport a vehicle stopped at an arbitrary position to a predetermined position in a parking facility.
特許文献1に示される装置は、それぞれ車両支持機構及び走行機構を備える左側搬送台車と右側搬送台車とからなり、該左側搬送台車と右側搬送台車とがそれぞれ独立して移動しつつ、協働して車両を支持し、搬送するようになっている。 The apparatus shown in Patent Document 1 includes a left conveyance carriage and a right conveyance carriage each having a vehicle support mechanism and a traveling mechanism, and the left conveyance carriage and the right conveyance carriage cooperate with each other while moving independently. The vehicle is supported and transported.
前記左側搬送台車と右側搬送台車は、無線通信によってリアルタイムに情報交換を行うことにより、協働している。 The left transport cart and the right transport cart cooperate by exchanging information in real time by wireless communication.
しかしながら、前述の如く、無線通信による台車相互間でのリアルタイムの情報交換に基づいて前記左側搬送台車と右側搬送台車とを協働させるのでは、通信障害で情報が途切れたり遅れたりすることもあり、前記左側搬送台車と右側搬送台車とを協働させるために必要な情報をリアルタイムに安定して得ることが難しかった。又、情報が安定して得られなかった場合、搬送される車両等の物体に必要以上の内力が加わることとなり、最悪の場合、物体を落としたり、傷つけたりする可能性があった。 However, as described above, if the left transport cart and the right transport cart cooperate based on real-time information exchange between the carts by wireless communication, information may be interrupted or delayed due to communication failure. It is difficult to stably obtain information necessary for cooperating the left and right transport carts in real time. In addition, when information is not stably obtained, an internal force more than necessary is applied to an object such as a vehicle being conveyed, and in the worst case, the object may be dropped or damaged.
このため、本発明者等は、無線通信のみによる台車相互間でのリアルタイムの情報交換を行うようにした協働搬送とは異なり、車両等の物体を落としたり、傷つけたりする心配がなく、複数の台車を協調制御により作動させることで、車両等の物体を確実に且つより安定して移動させ得る物体移動装置を提案している。(例えば、特許文献2参照。) For this reason, the present inventors do not have to worry about dropping or damaging an object such as a vehicle, unlike collaborative conveyance in which real-time information exchange is performed between trolleys using only wireless communication. The object moving apparatus which can move objects, such as a vehicle reliably, more stably by operating this cart by cooperative control is proposed. (For example, see
前記特許文献2に開示した物体移動装置は、複数の台車を協調制御により作動させるという非常に高度で優れた機能を有するものである反面、移動すべき物体がバス等のホイールベースの長い車両や接地ポイントとしての車輪の数が多い車両であった場合、移動装置自体を大きくしたり、車輪の数に合わせた機構のものを別途用意しなければならず、移動装置の種類が増える一方、移動装置が大型化した場合には、移動経路を広くとり、且つ保管スペースも広く必要になるという欠点を有していた。 Although the object moving device disclosed in
そこで、本発明者等は、車両等の物体の一つの接地ポイントとしての車輪をリフトアップし、与えられた目標軌道に沿って移動可能なリーダ台車と、該リーダ台車にてリフトアップされる車輪以外の一つの車輪をリフトアップする複数台のフォロワ台車とを備えることにより、大きさや接地ポイント数の異なる車両等の物体にも装置の種類を増やすことなく対応し得、車両等の物体を確実に且つより安定して移動させることができ、移動経路や保管スペースの削減をも図り得る物体移動装置を提案している。(例えば、特許文献3参照。) Therefore, the present inventors have lifted up a wheel as one contact point of an object such as a vehicle, and moved along a given target trajectory, and a wheel lifted up by the leader cart. By providing multiple follower carts that lift up one wheel other than the above, it is possible to cope with objects such as vehicles with different sizes and grounding points without increasing the number of types of devices, and reliably In addition, an object moving device has been proposed that can be moved more stably and can reduce the movement route and storage space. (For example, refer to
ところで、前輪と後輪の四個の車輪を有する車両に着目すると、基本的には後輪のサイドブレーキを開放して前輪だけを持ち上げれば、車両を運ぶことができ、必ずしも全ての車輪を持ち上げる必要はない。 By the way, paying attention to a vehicle having four wheels, a front wheel and a rear wheel, basically, the vehicle can be transported by lifting only the front wheel by releasing the side brake of the rear wheel, and not all wheels are There is no need to lift.
即ち、特許文献3に記載されているように通常四台の台車が車両の各車輪をリフトアップするシステムを配備した駐車施設において、状況に応じて二台ずつ二組の台車が複数の車両を並行作業で移動させることが実際に行えるのであれば、更なる効率化が期待できるという点に本発明者等は着目した。 That is, as described in
しかしながら、このように車両を運ぶ際の最大の問題は、車両の後輪が接地することによりシステムが非ホロノミックな拘束を受ける点にある。 However, the biggest problem in carrying the vehicle in this way is that the system is subjected to non-holonomic restraint due to the rear wheel of the vehicle being in contact with the ground.
そこで、本発明者等は、車両の前輪又は後輪のいずれか一方の車輪をリーダ台車とフォロワ台車とによってリフトアップし、該リーダ台車とフォロワ台車の制御点を前記車両のリフトアップされる二個の車輪の中点に設定し、前記車両を含めたシステム全体を、前記中点に設定され且つ能動的に全方向へ速度を発生可能な仮想キャスタと、前記車両の接地している側の対向する二個の車輪とによって構成される三輪車モデルに見立てて位置制御するようにした車両移動装置の運転方法を開発し、既に出願している(特願2010−273698参照)。 Accordingly, the present inventors lift up either the front wheel or the rear wheel of the vehicle with a leader carriage and a follower carriage, and control points of the leader carriage and the follower carriage are lifted up. Set to the midpoint of the wheels, and the entire system including the vehicle is set to the midpoint and is capable of actively generating speed in all directions, and the grounded side of the vehicle A driving method for a vehicle moving device has been developed and applied for in consideration of the position of a tricycle model composed of two wheels facing each other (see Japanese Patent Application No. 2010-273698).
本発明者等が既に出願している前記車両移動装置の運転方法においては、前記制御点に速度入力を与えたときの該制御点の運動を求める上で車両のホイールベースを知る必要がある。 In the driving method of the vehicle moving device already filed by the present inventors, it is necessary to know the wheel base of the vehicle in order to obtain the motion of the control point when a speed input is given to the control point.
しかしながら、実際には搬送の対象となる車種は非常に多く、そのホイールベースも様々である。このため、例えば、データベースとしてホイールベースを知識化する方法が考えられるが、この場合、車種を特定する装置の導入、或いは利用者に車種の入力を求めることが必要となり、手間がかかり、あまり好ましい手段であるとは言えなかった。又、カメラ等のセンサにより寸法を計測する方法も考えられるが、測定誤差や車体の弾性による寸法の変化が生じる可能性があり、必ずしも充分であるとは言えなかった。 However, there are actually a large number of vehicles that are transported, and the wheelbases are also various. For this reason, for example, a method of making the wheelbase knowledgeable as a database is conceivable, but in this case, it is necessary to introduce a device for identifying the vehicle type or to require the user to input the vehicle type, which is troublesome and is not preferable. It could not be said that it was a means. Although a method of measuring the dimensions with a sensor such as a camera is conceivable, there is a possibility that a change in dimensions due to a measurement error or the elasticity of the vehicle body may occur, which is not always sufficient.
本発明は、斯かる実情に鑑み、力制御を適用することにより、車両のホイールベースを推定しつつ、該車両の前輪又は後輪のいずれか一方の車輪をリーダ台車とフォロワ台車とによりリフトアップして精度良く移動させることができる車両移動装置の運転方法を提供しようとするものである。 In view of such circumstances, the present invention lifts up one of the front wheels and the rear wheels of the vehicle with a leader carriage and a follower carriage while estimating the wheel base of the vehicle by applying force control. Thus, an object of the present invention is to provide a driving method for a vehicle moving device that can be moved with high accuracy.
本発明は、走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ車両の一つの車輪をリフトアップするリフターとを有し、与えられた目標軌道に沿って移動可能なリーダ台車と、
走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ前記車両の前記リーダ台車にてリフトアップされる車輪以外の一つの車輪をリフトアップするリフターとを有し、前記リーダ台車の動きを推定しつつ追従することにより、該リーダ台車と協調して車両を移動させるフォロワ台車とを備え、
前記車両の前輪又は後輪のいずれか一方の車輪を前記リーダ台車とフォロワ台車とによってリフトアップし、該リーダ台車とフォロワ台車の制御点を前記車両のリフトアップされる二個の車輪の中点に設定し、前記車両を含めたシステム全体を、前記中点に設定され且つ能動的に全方向へ速度を発生可能な仮想キャスタと、前記車両の接地している側の対向する二個の車輪とによって構成される三輪車モデルに見立てて位置制御する車両移動装置の運転方法であって、
前記リーダ台車とフォロワ台車を前記制御点回りにインピーダンス制御して[数20]に示す運動を行わせ、
A carriage main body capable of self-propelling in all directions by a traveling drive device, and a lifter for lifting one wheel other than the wheel attached to the carriage main body via a coupling mechanism and lifted up by the leader carriage of the vehicle A follower carriage that moves the vehicle in cooperation with the leader carriage by following the movement while estimating the movement of the leader carriage.
The wheel of either the front wheel or the rear wheel of the vehicle is lifted by the leader carriage and the follower carriage, and the control point of the leader carriage and the follower carriage is the midpoint of the two wheels to be lifted by the vehicle The entire system including the vehicle, the virtual caster set at the midpoint and capable of actively generating speed in all directions, and the two wheels facing each other on the grounding side of the vehicle A driving method of a vehicle moving device that controls the position of a tricycle model constituted by:
Impedance control of the leader carriage and the follower carriage around the control point is performed as shown in [Equation 20],
本発明の車両移動装置の運転方法を利用すれば、前記制御点に速度入力を与えたときの該制御点の運動を求める上で知る必要のある車両のホイールベースを、例えば、データベースとしてホイールベースを知識化したりすることなく、推定可能となるため、車種を特定する装置の導入、或いは利用者に車種の入力を求めることが不要となり、手間がかからなくなる。又、カメラ等のセンサにより寸法を計測する方法も導入しなくて済むため、測定誤差や車体の弾性による寸法の変化が生じることに伴う不具合が生じる心配もない。 If the driving method of the vehicle moving apparatus of the present invention is used, the wheel base of the vehicle that needs to be known for obtaining the motion of the control point when a speed input is given to the control point, for example, the wheel base as a database. Therefore, it is not necessary to introduce a device for identifying the vehicle type or to ask the user to input the vehicle type, and it is not time-consuming. In addition, since it is not necessary to introduce a method for measuring dimensions with a sensor such as a camera, there is no fear of causing problems due to measurement errors and changes in dimensions due to elasticity of the vehicle body.
本発明の車両移動装置の運転方法によれば、力制御を適用することにより、車両のホイールベースを推定しつつ、該車両の前輪又は後輪のいずれか一方の車輪をリーダ台車とフォロワ台車とによりリフトアップして精度良く移動させることができるという優れた効果を奏し得る。 According to the driving method of the vehicle moving device of the present invention, by applying force control, the wheel base of the vehicle is estimated, and either the front wheel or the rear wheel of the vehicle is set as a leader carriage and a follower carriage. Therefore, it is possible to achieve an excellent effect of being able to lift up and move with high accuracy.
以下、本発明の実施の形態を添付図面を参照して説明する。 Embodiments of the present invention will be described below with reference to the accompanying drawings.
図1〜図10は本発明の車両移動装置の運転方法の実施例であって、
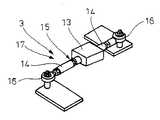
走行駆動装置1により全方向に自走可能な台車本体2と、該台車本体2に連結機構3を介して取り付けられ且つ物体としての車両4の一つの車輪4aをリフトアップするリフター5とを有し、与えられた目標軌道に沿って移動可能なリーダ台車Aと、
走行駆動装置1により全方向に自走可能な台車本体2と、該台車本体2に連結機構3を介して取り付けられ且つ前記車両4の前記リーダ台車Aにてリフトアップされる車輪4a以外の一つの車輪4aをリフトアップするリフター5とを有し、前記リーダ台車Aの動きを推定しつつ追従することにより、該リーダ台車Aと協調して車両4を移動させるフォロワ台車Bとを備えてなる車両移動装置を利用するようにしたものである。FIGS. 1-10 is an Example of the driving | running method of the vehicle moving apparatus of this invention, Comprising:
A carriage
A carriage
前記台車本体2は、図1〜図3に示す如く、直方体の四隅部をカットして細長い八角柱形状に組み立てられた台車フレーム2aの四隅部に、走行駆動装置1として走行車輪6を走行モータ7(走行アクチュエータ)(図6参照)の作動により水平な車軸8を中心に回転可能に配設してなる構成を有している。尚、前記走行車輪6は、操舵を必要としないオムニホイール(登録商標)やメカナムホイール等の全方向移動車輪とし、台車本体2の幅方向(図8の左右方向)に対しそれぞれ45°の角度を持ち、且つ対角に位置する走行車輪6同士が平行となるようにしてある。又、前記走行モータ7には、軌道センサとしての走行エンコーダ11(図6参照)が一体に組み込まれ、台車本体2の実際の軌道情報を検出できるようにしてある。更に又、前記走行車輪6の全てが常に地面と接触するよう、四個のうち二個の走行車輪6はサスペンション機構6aを介して台車フレーム2aに取り付けるようにしてある。 As shown in FIGS. 1 to 3, the
前記連結機構3は、図3及び図4に示す如く、力センサとしての引張圧縮型のロードセル13の両端にロッド14を取り付けた連結部材15を、その一端がユニバーサルジョイント16により台車本体2側に連結され他端がユニバーサルジョイント16によりリフター5側に連結されるよう、同一水平面内に複数(図8の例では三個)配設してなるパラレルリンク機構17によって構成してある。この場合、前記台車本体2に対しリフター5は、図2に示す如く、水平面内におけるX−Y方向に移動する方向の2自由度と、該X−Y方向に対して直交するZ軸を中心として回転する方向の1自由度とを加えた平面3自由度が拘束され、且つX軸を中心として回転する方向の1自由度と、Y軸を中心として回転する方向の1自由度と、Z軸方向に移動する方向の1自由度とを加えた3自由度がフリーとなるよう、前記パラレルリンク機構17(図3、図4及び図8参照)を介して配置される形となる。 As shown in FIGS. 3 and 4, the
前記リフター5は、図1〜図3及び図5に示す如く、前記車両4の各車輪4aを支持するための車輪浮上支持装置18を装備し、該車輪浮上支持装置18は、前記台車本体2に対し連結機構3を介して取り付けられるリフターフレーム5aに、リニアガイドレール19を台車本体2の幅方向(図8の左右方向)へ延びるよう固定配置すると共に、該リニアガイドレール19に対し、リニアガイドブロック19aを介して一対のラック部材21を互いにそのラック部の形成面が対向した状態で前記リニアガイドレール19に沿ってスライド自在となるよう配設し、前記リフターフレーム5aの中央部に一体に設けられ両端が開放された中空箱形のベース枠5bに、エンコーダ等のリフトバー開閉センサ22が一体に設けられたモータ等のリフトバー開閉アクチュエータ23を取り付け、該リフトバー開閉アクチュエータ23によって回転駆動される駆動ピニオン24を前記一対のラック部材21の互いに対向するラック部に対し前記ベース枠5b内でその両方に噛合させ、前記リニアガイドブロック19aから、底面が開放された断面門型のカバーフレーム5cを張り出させ、該カバーフレーム5cに対し、外周に車輪支持ローラ25が回転自在に嵌装され且つ先端部と基端部に接地支持輪26が取り付けられたリフトバー27を、前記ラック部材21と直角な水平方向へ延び且つ前記リニアガイドレール19と平行な揺動軸5dを中心に揺動自在となるよう取り付けてなる構成を有し、前記リフター5の車輪浮上支持装置18における一対のリフトバー27を前記車両4の各車輪4aの前後に配置して互いに近接させることにより、該車両4をリフトアップするよう構成してある。尚、前記リフトバー27の両端に取り付けた接地支持輪26により車両4の重量全てを支持するため、台車本体2は、車両4の重量を支持できるよう頑丈に設計する必要がなくなるという利点があり、更に、前記リフトバー27をその開閉方向と平行な揺動軸5dを中心に揺動自在となるようにしているため、二本のリフトバー27に取り付けた四つの接地支持輪26は常に接地する形となり、好ましい。 As shown in FIGS. 1 to 3 and 5, the
前記リフトバー27の車輪支持ローラ25表面には、ローレット加工、或いは滑り止め塗料の塗装といった滑り止め加工を施すようにしてある。 The surface of the
前記接地支持輪26には、一般的なキャスタを用いるようにしてあるが、前記走行車輪6と同様に、操舵を必要としないオムニホイール(登録商標)やメカナムホイール等の全方向移動車輪を用いても良いことは言うまでもない。 A general caster is used for the
一方、図6はリーダ台車Aの全体制御系統並びにフォロワ台車Bの全体制御系統を示すブロック図であり、前記リーダ台車Aに搭載されたリーダ制御部31には、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11と、前記連結機構3の力センサとしてのロードセル13と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22と、前記フォロワ台車Bへ制御情報を送信するための無線通信装置39とを接続し、前記連結機構3の力センサとしてのロードセル13による検出信号と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11による検出信号とに基づいて、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7に駆動信号を出力すると共に、前記無線通信装置39にてフォロワ台車Bへの制御情報を送信しつつ、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22による検出信号に基づいて、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23に駆動信号を出力する一方、
前記フォロワ台車Bに搭載されたフォロワ制御部32には、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11と、前記連結機構3の力センサとしてのロードセル13と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22と、前記リーダ台車Aからの制御情報を受信するための無線通信装置40とを接続し、前記連結機構3の力センサとしてのロードセル13による検出信号と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11による検出信号と、前記無線通信装置40で受信したリーダ台車Aからの制御情報とに基づいて、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7に駆動信号を出力すると共に、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22による検出信号に基づいて、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23に駆動信号を出力するようにしてある。On the other hand, FIG. 6 is a block diagram showing an overall control system of the leader carriage A and an overall control system of the follower carriage B. The
The
前記リーダ台車Aとフォロワ台車Bの協調制御に関するシステムについてより詳しくは、図7に示す如く、前記リーダ台車Aとフォロワ台車Bとの間で車両4を介して相互に働く相互作用力を前記リーダ台車Aの力センサとしてのロードセル13により力情報として検出し、前記リーダ台車Aの台車本体2の実際の軌道情報を前記軌道センサとしての走行エンコーダ11によって検出し、前記リーダ制御部31において、予め入力される目標軌道情報と、前記リーダ台車Aの力センサとしてのロードセル13で検出された力情報と、前記リーダ台車Aの軌道センサとしての走行エンコーダ11で検出された実際の軌道情報とに基づき、前記リーダ台車Aの台車本体2の走行アクチュエータへ電流指令値を出力すると共に、前記無線通信装置39にてフォロワ台車Bへの制御情報を送信し、前記リーダ台車Aの台車本体2を目標軌道に沿って移動させる一方、
前記リーダ台車Aとフォロワ台車Bとの間で車両4を介して相互に働く相互作用力を前記フォロワ台車Bの力センサとしてのロードセル13により力情報として検出し、前記フォロワ台車Bの台車本体2の実際の軌道情報を前記軌道センサとしての走行エンコーダ11によって検出し、前記リーダ台車Aから無線通信装置39にて送信される制御情報を無線通信装置40で受信し、前記フォロワ制御部32において、前記フォロワ台車Bの力センサとしてのロードセル13で検出された力情報と、前記フォロワ台車Bの軌道センサとしての走行エンコーダ11で検出された実際の軌道情報と、前記無線通信装置40で受信したリーダ台車Aからの制御情報とに基づき、前記フォロワ台車Bの台車本体2の走行アクチュエータへ電流指令値を出力し、前記フォロワ台車Bの台車本体2を前記リーダ台車Aの動きに追従させて移動させるようにしてある。In more detail about the system related to the cooperative control of the leader carriage A and the follower carriage B, as shown in FIG. 7, the interaction force acting between the leader carriage A and the follower carriage B via the
The interaction force acting between the leader carriage A and the follower carriage B via the
尚、前記フォロワ台車Bの台車本体2がリーダ台車Aの動きに追従して移動するための前記ロードセル13で検出された力情報に、例えば、地面と前記リフター5の接地支持輪26との摩擦や慣性力等の外乱要素が影響を与える場合、前記リーダ台車Aの動きにフォロワ台車Bが追従しようとする動きに対し誤差を増大させてしまうので、より安定した状態で前記リーダ台車Aとフォロワ台車Bとを協調させて車両4を移動させるには、前述の如き誤差を修正するための制御情報が必要となることから、該制御情報を前記リーダ制御部31より、前記リーダ台車Aの無線通信装置39にて送信しフォロワ台車Bの無線通信装置40で受信し、フォロワ制御部32で前記誤差を修正する計算を前記制御情報に基づいて行うようにしてある。 Note that the force information detected by the
ここで、前記力センサとしての引張圧縮型のロードセル13が介装された連結部材15を平面3自由度を拘束するパラレルリンク機構17として図8に示すような配置で三つ取り付けた場合、ロードセル13による検出値をヤコビ行列で座標変換すると、外力としてリフター5に加わる力を平面3自由度の力情報として得ることができるが、具体的な計算例については、特許文献3に記載されている。 Here, when three connecting
又、リーダ台車Aとフォロワ台車Bの協調制御の基本的な考え方に関しては、小菅一弘、大住智宏、千葉晋彦による「単一物体を操る複数移動ロボットの分散協調制御」、日本ロボット学会誌16巻1号、pp.87〜95に記載されている。 Also, regarding the basic concept of cooperative control of leader carriage A and follower carriage B, “Distributed cooperative control of multiple mobile robots that manipulate a single object” by Kazuhiro Komine, Tomohiro Ozumi, and Yasuhiko Chiba, Journal of the Robotics Society of
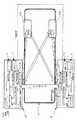
そして、本実施例の場合、図1に示す如く、前記車両4の車輪4aのうち右側の前輪を前記リーダ台車Aでリフトアップすると共に、前記車両4の車輪4aのうち左側の前輪を前記フォロワ台車Bによってリフトアップし、図9に示す如く、該リーダ台車Aとフォロワ台車Bの制御点CPを前記車両4のリフトアップされる二個の車輪4aの中点に設定し、前記車両4を含めたシステム全体を、前記中点に設定され且つ能動的に全方向へ速度を発生可能な仮想キャスタと、前記車両4の接地している側の対向する二個の車輪4aとによって構成される三輪車モデルに見立てて位置制御するよう構成してある。 In the case of the present embodiment, as shown in FIG. 1, the right front wheel of the wheels 4a of the
図9に示すシステム全体の幾何モデルにおいて、Oを原点とするX−Y座標系を設定した場合、前記制御点CPの位置と姿勢を(xp,yp,θp)で表し、車両4の進行方向と平行な方向の速度をu2、該u2と直交する方向のリーダ台車A及びフォロワ台車Bが生成する制御点CPの速度をu1、車両4のホイールベースをLとすると、前記制御点CPにu1、u2の速度入力を与えたときの該制御点CPの運動は下記の[数1]で表される。
尚、[数1]で表される幾何モデルは一般的な三輪車モデルと異なり操舵輪の概念はなく、全方向移動ロボットとしての前記リーダ台車A及びフォロワ台車Bにより制御点CPに即座に任意の方向へ速度を発生させることが可能である。 Unlike the general tricycle model, the geometric model represented by [Equation 1] does not have the concept of a steered wheel, and the reader cart A and follower cart B as omnidirectional mobile robots can immediately set an arbitrary point at the control point CP. It is possible to generate speed in the direction.
このモデルにおいて、前記リーダ台車A及びフォロワ台車Bが指令通りに速度を発生可能で、同時に車両4の移動を開始し、同一の計算式に従って制御入力が決定され、同一の周期でループする制御系とするならば、理論上は前記リーダ台車A及びフォロワ台車Bの制御点CPは常に一致し、同期しながら車両4の搬送を行うことできる。又、このモデル化により既に提案されている三輪車型ロボットの制御手法を本実施例の車両移動装置の運転方法に適用できるようになる。 In this model, the leader carriage A and the follower carriage B can generate a speed as instructed, start the movement of the
先ず、前記三輪車の幾何モデルを非ホロノミックシステムの制御手法の一つであるChained Systemに変換する。[数1]で表されるシステムはChained Systemへ変換するための十分条件を満たしており、[数2]で表される1Generator、1Chain、2入力型のChained Systemに変換できる。
尚、状態変数zはxpにより[数3]のように表され、又、入力v1,v2はu1,u2により[数4]のように表される。
Chained Systemを用いた制御手法の一つとして、Khennouf等により提案されている疑似連続指数安定化制御がある。疑似連続指数安定化制御は、Chained Systemに[数5]に示すフィードバック入力を与えることにより、zを0へ収束させる制御手法であり、そのときxpも0へ収束する。
本制御則ではフィードバックゲインf,kをf>2kを満たすように定める必要がある。そうしない場合はS(z)よりもW(z)が先に0に収束し、入力が発散する。尚、S(z)、W(z)は[数6]、[数7]に示すようにzで表される関数である。
但し、疑似連続指数安定化制御はシステムの初期位置と原点、フィードバックゲインf,kが定まればその軌道が一意に定まる制御手法であり、特定の軌道に追従させるような制御はできないが、車両4の車庫等への搬送作業を考えると、障害物に接触しないよう運動させる必要がある。そこで疑似連続指数安定化制御を利用し、車両4を任意の何点かを経由させることで障害物に接触させずに目標位置まで搬送させることを考える。疑似連続指数安定化制御は状態変数を原点へ収束させる制御則であるが、修正偏差系と呼ばれる、目標値と現在値の偏差から計算される修正偏差変数で表されるChained Systemを用いることにより、車両4を任意の位置・姿勢へ収束させることが可能になる。 However, the quasi-continuous exponential stabilization control is a control method in which the trajectory is uniquely determined if the initial position, origin, and feedback gains f and k of the system are determined. Considering the transportation work to
修正偏差変数eは、[数8]、[数9]により計算される修正目標値rと状態zの偏差を用いて[数10]のように定義される。このとき修正偏差変数は[数11]のようにv1,v2を入力とするChained Systemとなり、eが0に収束すると、車両4の位置xpは目標値x´pへ収束する。
この修正偏差系に対して、[数12]に示す疑似連続指数安定化制御を適用することにより、eを0に収束させ、車両4を目標の位置・姿勢へ到達させる。
本実施例においては、先ず、停車し後輪のサイドブレーキが開放されている車両4に対し、リーダ台車Aを走行させてリフター5の車輪浮上支持装置18のリフトバー27を車両4の車輪4aのうち右側の前輪の前後に配置すると共に、フォロワ台車Bを走行させてリフター5の車輪浮上支持装置18のリフトバー27を前記車両4の車輪4aのうち左側の前輪の前後に配置する。 In the present embodiment, first, the
続いて、リーダ制御部31並びにフォロワ制御部32からの駆動信号により、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23を所望の方向へ回転駆動すると、対を成すリフトバー27が互いに近接する方向へ移動していき、リフトバー27上に車両4の車輪4aのうち前輪が載置される形となって、該車両4の前輪が図1に示すようにリフトアップされる。 Subsequently, when the lift bar opening /
この状態から、図9に示す如く、前記リーダ台車Aとフォロワ台車Bの制御点CPが前記車両4のリフトアップされる二個の車輪4aの中点に設定され、前記車両4を含めたシステム全体が、前記中点に設定され且つ能動的に全方向へ速度を発生可能な仮想キャスタと、前記車両4の接地している側の対向する二個の車輪4aとによって構成される三輪車モデルに見立てて位置制御される。 From this state, as shown in FIG. 9, the control point CP of the leader carriage A and the follower carriage B is set to the midpoint of the two wheels 4 a lifted up of the
ここで、本発明者等の更なる研究により、本実施例に示すようなモデルには[数13]の如き運動拘束が働くことが確認されている。
そして、前記リーダ台車A及びフォロワ台車Bに指令する絶対座標系O−xyから見た制御
これに対し前記想定ホイールベースLintが実際のホイールベースLrealと一致しない場合は、恒等式[数13]を満たさず、従って非ホロノミック拘束の条件を満たさないため、車両4は拘束される方向へ運動しないようにするためにリーダ台車A及びフォロワ台車Bへ拘束力を加える。該拘束力により、リーダ台車A及びフォロワ台車Bと地面との間に滑りが生じたり、車両4との相対位置・姿勢がずれたりし、結果として車両4を目的の位置へ搬送できなくなる。On the other hand, when the assumed wheel base Lint does not match the actual wheel base Lreal , the identity [Equation 13] is not satisfied, and therefore the condition of the nonholonomic constraint is not satisfied. In order not to move, a restraining force is applied to the leader carriage A and the follower carriage B. The binding force causes slippage between the leader carriage A and the follower carriage B and the ground, or a relative position / posture with respect to the
そこで、本実施例では、車両4から受ける運動を拘束する力に対してリーダ台車A及びフォロワ台車Bが受動的な運動を実現できるようにするために、リーダ台車Aとフォロワ台車Bをそれぞれ制御点CP回りに[数15][数16]に示すよう、力制御の一つであるインピーダンス制御する。
前記力センサとしての引張圧縮型のロードセル13によって検出される力は、車両4から受ける運動を拘束する力だけでなく、リーダ台車A及びフォロワ台車Bの引張圧縮の力や床面との摩擦力、車両4の慣性力も含まれる。そのため、これらの力に対するシステムの応答について、以下のように仮定する。先ず、リーダ台車A及びフォロワ台車Bは同位置を制御点CPとし、同じ制御則で運動するため、二台のリーダ台車A及びフォロワ台車Bの間に運動誤差は生じず、結果、引張圧縮力は発生しないと仮定する。次に、摩擦力及び慣性力は、同様の理由から、均等に二台のリーダ台車A及びフォロワ台車Bに分配されると仮定する。最後に、リーダ台車A及びフォロワ台車Bはインピーダンス制御により車両4から受ける運動を拘束する力に対して受動的に運動し、非ホロノミックな拘束に従って運動すると仮定する。たとえ、摩擦力、慣性力に応じてリーダ台車A及びフォロワ台車Bが運動する場合でも、非ホロノミックな運動拘束に従うものとする。 The force detected by the tension /
以上より、リーダ台車A及びフォロワ台車Bは[数14][数16][数18][数19]に基づいて[数20]に示す運動をする。
前記[数20]は想定ホイールベースLintが車両4の実際のホイールベースLrealと異なる場合に運動を生成した際も、インピーダンス制御に基づいて力に対して生じる速度偏差によって、現実にリーダ台車A及びフォロワ台車Bが受ける非ホロノミックな運動拘束に従って運動することを表す。The above [Equation 20] is actually a leader carriage due to the speed deviation generated for the force based on the impedance control even when the motion is generated when the assumed wheel base Lint is different from the actual wheel base Lreal of the
従って、前記リーダ台車A及びフォロワ台車Bに指令する制御点CPの実際の速度ベク
上記した本実施例におけるホイールベースの推定アルゴリズムは図10に示すブロック図のように表される。 The wheelbase estimation algorithm in the above-described embodiment is represented as a block diagram shown in FIG.
因みに、前記リーダ台車A及びフォロワ台車Bが受ける非ホロノミックな拘束に関して、[数21]の並進速度を車両4の姿勢に平行な方向に座標変換すると、[数24]のように直すことができる。
一方、[数28]に定義される実際のホイールベースLrealと想定ホイールベースLintとの偏差ΔLを利用して、実際のホイールベースLrealを推定しようとした場合、
前記[数29][数30]により[数31]が導かれる。
前記[数31]からわかるように、前記偏差ΔLは、実際のホイールベースLrealを直接
これに対し、前記[数22]の右辺の
そして、本発明者等は、本実施例におけるホイールベースの推定アルゴリズムによる実際のホイールベースLrealと想定ホイールベースLintとの偏差ΔLの収束性について解析を行った。The inventors analyzed the convergence of the deviation ΔL between the actual wheel base Lreal and the assumed wheel base Lint according to the wheel base estimation algorithm in the present embodiment.
前記偏差ΔLは[数22][数28][数31]より、[数35]のように実際のホイ
先ず、
更に、[数37]を時間tで微分すると、[数38]を得る。
[数37][数38]よりΔLについて微分方程式を解くと、該ΔLは[数39]のように表される。
[数39]より、ΔLはt→∞のとき、0に漸近する。想定ホイールベースLintは実際のホイールベースLrealに漸近し、ホイールベースを推定したことになる。又、パラメータaを変えることにより、ΔLの収束速度を調節することが可能である。尚、前記[数36]のようにKを設定した場合は、即ち
一方、
[数42]を時間tで微分すると、[数43]を得る。
[数42][数43]よりΔLについて微分方程式を解くと、該ΔLは[数44]のように表される。
[数44]より、前記[数41]のようにKを設定した場合、車両4とリーダ台車A及びフォロワ台車Bが回転するほどΔLは0に漸近する性質を持つことがわかる。又、前記[数41]のようにKを設定した場合というのは、
以上述べたように、前記制御点CPに速度入力を与えたときの該制御点CPの運動を求める上で知る必要のある車両4のホイールベースを、例えば、データベースとしてホイールベースを知識化したりすることなく、推定可能となるため、車種を特定する装置の導入、或いは利用者に車種の入力を求めることが不要となり、手間がかからなくなる。又、カメラ等のセンサにより寸法を計測する方法も導入しなくて済むため、測定誤差や車体の弾性による寸法の変化が生じることに伴う不具合が生じる心配もない。 As described above, the wheel base of the
こうして、力制御を適用することにより、車両4のホイールベースを推定しつつ、該車両4の前輪又は後輪のいずれか一方の車輪4aをリーダ台車Aとフォロワ台車Bとによりリフトアップして精度良く移動させることができる。 Thus, by applying force control, the wheel base of the
尚、本発明の車両移動装置の運転方法は、上述の実施例にのみ限定されるものではなく、前輪の代わりに後輪をリフトアップすることも可能であること等、その他、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。 Note that the driving method of the vehicle moving device of the present invention is not limited to the above-described embodiment, and other features such as the ability to lift up the rear wheels instead of the front wheels, etc. Of course, various changes can be made without departing from the scope of the invention.
1 走行駆動装置
2 台車本体
2a 台車フレーム
3 連結機構
4 車両
4a 車輪
5 リフター
6 走行車輪
11 走行エンコーダ
13 ロードセル
18 車輪浮上支持装置
27 リフトバー
31 リーダ制御部
32 フォロワ制御部
39 無線通信装置
40 無線通信装置
A リーダ台車
B フォロワ台車
CP 制御点
L ホイールベースDESCRIPTION OF SYMBOLS 1
Claims (1)
Translated fromJapanese走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ前記車両の前記リーダ台車にてリフトアップされる車輪以外の一つの車輪をリフトアップするリフターとを有し、前記リーダ台車の動きを推定しつつ追従することにより、該リーダ台車と協調して車両を移動させるフォロワ台車とを備え、
前記車両の前輪又は後輪のいずれか一方の車輪を前記リーダ台車とフォロワ台車とによってリフトアップし、該リーダ台車とフォロワ台車の制御点を前記車両のリフトアップされる二個の車輪の中点に設定し、前記車両を含めたシステム全体を、前記中点に設定され且つ能動的に全方向へ速度を発生可能な仮想キャスタと、前記車両の接地している側の対向する二個の車輪とによって構成される三輪車モデルに見立てて位置制御する車両移動装置の運転方法であって、
前記リーダ台車とフォロワ台車を前記制御点回りにインピーダンス制御して[数20]に示す運動を行わせ、
A carriage main body capable of self-propelling in all directions by a traveling drive device, and a lifter for lifting one wheel other than the wheel attached to the carriage main body via a coupling mechanism and lifted up by the leader carriage of the vehicle A follower carriage that moves the vehicle in cooperation with the leader carriage by following the movement while estimating the movement of the leader carriage.
The wheel of either the front wheel or the rear wheel of the vehicle is lifted by the leader carriage and the follower carriage, and the control point of the leader carriage and the follower carriage is the midpoint of the two wheels to be lifted by the vehicle The entire system including the vehicle, the virtual caster set at the midpoint and capable of actively generating speed in all directions, and the two wheels facing each other on the grounding side of the vehicle A driving method of a vehicle moving device that controls the position of a tricycle model constituted by:
Impedance control of the leader carriage and the follower carriage around the control point is performed as shown in [Equation 20],
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011076524AJP5603821B2 (en) | 2011-03-11 | 2011-03-11 | Driving method of vehicle moving device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011076524AJP5603821B2 (en) | 2011-03-11 | 2011-03-11 | Driving method of vehicle moving device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012188104Atrue JP2012188104A (en) | 2012-10-04 |
| JP5603821B2 JP5603821B2 (en) | 2014-10-08 |
Family
ID=47081720
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011076524AExpired - Fee RelatedJP5603821B2 (en) | 2011-03-11 | 2011-03-11 | Driving method of vehicle moving device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5603821B2 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107237531A (en)* | 2017-07-17 | 2017-10-10 | 邹铁梅 | A kind of support of auxiliary side parking |
| CN109025439A (en)* | 2018-09-11 | 2018-12-18 | 杭州极木科技有限公司 | Intelligent robot for carrying automobiles |
| CN110510015A (en)* | 2019-08-26 | 2019-11-29 | 济南匠夫万自动化科技有限公司 | Crawler type escaping apparatus and vehicle |
| WO2021119703A1 (en)* | 2019-12-16 | 2021-06-24 | Avl List Gmbh | Robot for transporting a vehicle |
| EP3842605A4 (en)* | 2018-10-12 | 2021-11-10 | Guangzhou Dabo Intelligent Technology Co., Ltd. | INTELLIGENT PARKING AND CLUSTER TRANSPORT ROBOTS FOR THIS |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004169451A (en)* | 2002-11-21 | 2004-06-17 | Ishikawajima Harima Heavy Ind Co Ltd | Ingress and egress devices in parking facilities |
| JP2009108542A (en)* | 2007-10-29 | 2009-05-21 | Ishikawajima Transport Machinery Co Ltd | Object moving device |
| JP2009287269A (en)* | 2008-05-29 | 2009-12-10 | Ishikawajima Transport Machinery Co Ltd | Object moving unit |
| JP2009286570A (en)* | 2008-05-29 | 2009-12-10 | Ishikawajima Transport Machinery Co Ltd | Object moving apparatus |
| WO2010131342A1 (en)* | 2009-05-13 | 2010-11-18 | トヨタ自動車株式会社 | Specification information estimating device and vehicle |
| JP2012122250A (en)* | 2010-12-08 | 2012-06-28 | Ihi Transport Machinery Co Ltd | Method for operating vehicle transporting apparatus |
- 2011
- 2011-03-11JPJP2011076524Apatent/JP5603821B2/ennot_activeExpired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004169451A (en)* | 2002-11-21 | 2004-06-17 | Ishikawajima Harima Heavy Ind Co Ltd | Ingress and egress devices in parking facilities |
| JP2009108542A (en)* | 2007-10-29 | 2009-05-21 | Ishikawajima Transport Machinery Co Ltd | Object moving device |
| JP2009287269A (en)* | 2008-05-29 | 2009-12-10 | Ishikawajima Transport Machinery Co Ltd | Object moving unit |
| JP2009286570A (en)* | 2008-05-29 | 2009-12-10 | Ishikawajima Transport Machinery Co Ltd | Object moving apparatus |
| WO2010131342A1 (en)* | 2009-05-13 | 2010-11-18 | トヨタ自動車株式会社 | Specification information estimating device and vehicle |
| JP2012122250A (en)* | 2010-12-08 | 2012-06-28 | Ihi Transport Machinery Co Ltd | Method for operating vehicle transporting apparatus |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107237531A (en)* | 2017-07-17 | 2017-10-10 | 邹铁梅 | A kind of support of auxiliary side parking |
| CN109025439A (en)* | 2018-09-11 | 2018-12-18 | 杭州极木科技有限公司 | Intelligent robot for carrying automobiles |
| EP3842605A4 (en)* | 2018-10-12 | 2021-11-10 | Guangzhou Dabo Intelligent Technology Co., Ltd. | INTELLIGENT PARKING AND CLUSTER TRANSPORT ROBOTS FOR THIS |
| US12030422B2 (en) | 2018-10-12 | 2024-07-09 | Guangzhou Dabo Intelligent Technology Co., Ltd. | Intelligent parking lot and cluster transfer robot |
| CN110510015A (en)* | 2019-08-26 | 2019-11-29 | 济南匠夫万自动化科技有限公司 | Crawler type escaping apparatus and vehicle |
| WO2021119703A1 (en)* | 2019-12-16 | 2021-06-24 | Avl List Gmbh | Robot for transporting a vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5603821B2 (en) | 2014-10-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109885052B (en) | Error model prediction control method based on omnidirectional mobile robot kinematics modeling | |
| JP4667439B2 (en) | Object moving device | |
| JP5624445B2 (en) | Driving method of vehicle moving device | |
| JP5603821B2 (en) | Driving method of vehicle moving device | |
| CN101855414A (en) | object moving device | |
| JP2009286570A (en) | Object moving apparatus | |
| Kim et al. | Mobile robot with passively articulated driving tracks for high terrainability and maneuverability on unstructured rough terrain: Design, analysis, and performance evaluation | |
| Selekwa et al. | Path tracking control of four wheel independently steered ground robotic vehicles | |
| CN103796806A (en) | Self-propelled robot and self-propelled truck | |
| JP5752460B2 (en) | Object moving device | |
| CN116635806A (en) | Method for operating a vehicle by means of a mobile robot, control system and mobile robot | |
| JP4945512B2 (en) | Vehicle movement method | |
| CN114728676A (en) | Autonomous mobile system for use as reconfigurable operating system in industrial plant | |
| KR101232584B1 (en) | Apparatus for controlling mobile robot and method of the same | |
| JP6468127B2 (en) | Omnidirectional moving body, control method and program thereof | |
| JP3791873B2 (en) | Transport cart | |
| JP2009287269A (en) | Object moving unit | |
| US20250278097A1 (en) | Autonomous Robot Double Drive Assembly | |
| KR102348607B1 (en) | A Locomotion Robot Device that tracks moving objects and its Control Method | |
| JP6841062B2 (en) | Omnidirectional mobile robot | |
| Endo et al. | A car transportation system by multiple mobile robots-iCART | |
| JP5603762B2 (en) | Object moving device | |
| Yonezawa et al. | Car transportation system grasping two drive wheels | |
| Xu et al. | Continuous mobility of mobile robots with a special ability for overcoming driving failure on rough terrain | |
| JP6743572B2 (en) | Mobile device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20140213 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20140717 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20140812 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20140822 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:5603821 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 | |
| S111 | Request for change of ownership or part of ownership | Free format text:JAPANESE INTERMEDIATE CODE: R313117 | |
| R350 | Written notification of registration of transfer | Free format text:JAPANESE INTERMEDIATE CODE: R350 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| LAPS | Cancellation because of no payment of annual fees |