JP2011258146A - Information processing terminal, holding hand discrimination method and program - Google Patents
Information processing terminal, holding hand discrimination method and programDownload PDFInfo
- Publication number
- JP2011258146A JP2011258146AJP2010134493AJP2010134493AJP2011258146AJP 2011258146 AJP2011258146 AJP 2011258146AJP 2010134493 AJP2010134493 AJP 2010134493AJP 2010134493 AJP2010134493 AJP 2010134493AJP 2011258146 AJP2011258146 AJP 2011258146A
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- information processing
- processing terminal
- detected
- user
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000010365information processingEffects0.000titleclaimsabstractdescription285
- 238000012850discrimination methodMethods0.000title1
- 230000001133accelerationEffects0.000claimsabstractdescription388
- 238000001514detection methodMethods0.000claimsabstractdescription79
- 238000000034methodMethods0.000claimsabstractdescription36
- 230000033001locomotionEffects0.000claimsdescription84
- 125000002066L-histidyl groupChemical group[H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H]0.000claimsdescription9
- 230000006870functionEffects0.000claimsdescription9
- 230000005484gravityEffects0.000claimsdescription6
- 230000009471actionEffects0.000claimsdescription2
- 238000004364calculation methodMethods0.000description12
- 210000000707wristAnatomy0.000description10
- 238000009434installationMethods0.000description9
- 238000010586diagramMethods0.000description6
- 230000008859changeEffects0.000description2
- 230000003287optical effectEffects0.000description2
- 238000005516engineering processMethods0.000description1
- 238000004519manufacturing processMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 230000008569processEffects0.000description1
- 238000000926separation methodMethods0.000description1
Images



















Landscapes
- Position Input By Displaying (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
Description
Translated fromJapanese本発明は、加速度センサを備えた情報処理端末に関する。 The present invention relates to an information processing terminal including an acceleration sensor.
スマートフォンやPDA(Personal Digital Assistant)などの、タッチパネルを備えた小型の情報処理端末が普及し始めている。このような情報処理端末は、移動中などに使用することもあり、片手で持ち、その持ち手により操作することがある。このため、タッチパネルに表示するGUI(Graphical User Interface)を、ユーザの持ち手に適したものにすることができると便利である。 Small information processing terminals equipped with a touch panel, such as smartphones and PDAs (Personal Digital Assistants), are beginning to spread. Such an information processing terminal may be used during movement or the like, and may be held with one hand and operated with the hand. For this reason, it is convenient if the GUI (Graphical User Interface) displayed on the touch panel can be made suitable for the user's handle.
そこで、例えば、特許文献1には、持ち手が右手であるときと、左手であるときと、で表示を切り替える技術が開示されている。また、特許文献2には、タッチパネルを備えた情報処理端末において、タッチパネルに表示されるGUIを、右手での操作に最適化されたGUIと、左手での操作に最適化されたGUIと、で切り替える技術が開示されている。特許文献2に開示された情報処理端末は、ユーザが手で持つ位置に設置されたセンサを有しおり、そのセンサを用いて、ユーザが情報処理端末を右手で持っているのか、左手でもっているのか、の判別を行い、その判別結果に基づき、GUI表示の切り替えを行う。 Thus, for example, Patent Document 1 discloses a technique for switching display between when the handle is the right hand and when the handle is the left hand. Further, in Patent Document 2, in an information processing terminal equipped with a touch panel, the GUI displayed on the touch panel is divided into a GUI optimized for the operation with the right hand and a GUI optimized for the operation with the left hand. A technique for switching is disclosed. The information processing terminal disclosed in Patent Document 2 has a sensor installed at a position held by the user's hand, and the user uses the sensor to hold the information processing terminal with the right hand or with the left hand. The GUI display is switched based on the determination result.
しかしながら、特許文献1に開示された技術は、ユーザによる設定により持ち手に適した表示に替える技術であり、持ち手を自動的に判別し、その判別された持ち手に適した表示に自動的に切り替える技術ではない。 However, the technique disclosed in Patent Document 1 is a technique for switching to a display suitable for a handle by setting by a user, and automatically determines the handle and automatically displays the display suitable for the determined handle. It is not a technology to switch to.
また、特許文献2に開示された技術は、持ち手を自動的に判別し、その判別された持ち手に適した表示に自動的に切り替える技術であるが、持ち手を判別するためのセンサを設置しなくてはならない。つまり、特許文献2に開示された技術は、専用の部品を必要とし、小型化、軽量化が求められる携帯用の情報処理端末に適した技術ではない。また、このような専用の部品の追加は、情報処理端末の製造コストを上げてしまう。 Further, the technique disclosed in Patent Document 2 is a technique for automatically determining a handle and automatically switching to a display suitable for the determined handle. Must be installed. That is, the technique disclosed in Patent Document 2 is not a technique suitable for a portable information processing terminal that requires dedicated parts and is required to be reduced in size and weight. Further, the addition of such dedicated parts increases the manufacturing cost of the information processing terminal.
そこで本発明は、上記問題点に鑑みてなされたもので、ユーザの持ち手が右手と左手のどちらであるのかを判別することが可能な情報処理端末、持ち手判別方法及びプログラムを提供することを目的とする。 Accordingly, the present invention has been made in view of the above problems, and provides an information processing terminal, a handle determination method, and a program capable of determining whether a user's handle is a right hand or a left hand. With the goal.
上記課題を解決するため、本発明における情報処理端末は、自機に対する動作による加速度を検出する加速度検出手段と、前記加速度検出手段により検出された動作による加速度に基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別手段と、を有することを特徴とする。 In order to solve the above-described problem, an information processing terminal according to the present invention includes an acceleration detection unit that detects an acceleration caused by an operation on the own device, and a user holding the own device on the right hand based on the acceleration caused by the operation detected by the acceleration detection unit. Possessing hand discriminating means for discriminating which hand is held with the left hand.
また、本発明における情報処理端末は、自機に対してユーザにより振る動作が行われたときに、前記ユーザにより自機が振られた方向を検出する検出手段と、前記検出手段により検出された方向に基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別手段と、を有することを特徴とする。 In addition, the information processing terminal according to the present invention is detected by the detecting unit that detects a direction in which the user shakes the user's own device when the user shakes the device. It is characterized by having a handle discriminating means for discriminating whether the user is holding his / her own hand with the right hand or the left hand based on the direction.
また、本発明における持ち手判別方法は、情報処理端末に対する動作による加速度を検出する加速度検出ステップと、前記加速度検出ステップにより検出された動作による加速度に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別ステップと、を有することを特徴とする。 In addition, according to the present invention, there is provided a method for determining a handle, an acceleration detecting step for detecting an acceleration due to an operation on the information processing terminal, and a user holding the information processing terminal between a right hand and a left hand based on the acceleration due to the operation detected by the acceleration detecting step. A holding hand determining step for determining which of the hand is holding.
また、本発明における持ち手判別方法は、情報処理端末に対してユーザにより振る動作が行われたときに、ユーザにより情報処理端末が振られた方向を検出する検出ステップと、前記検出ステップにより検出された方向に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別ステップと、を有することを特徴とする。 In addition, the method for determining a handle according to the present invention includes a detection step of detecting a direction in which the information processing terminal is shaken by the user when the user shakes the information processing terminal, and detection by the detection step. A holding hand determining step for determining whether the user is holding the information processing terminal with the right hand or the left hand based on the determined direction.
また、本発明におけるプログラムは、情報処理端末を、情報処理端末に対する動作による加速度を検出する加速度検出手段と、前記加速度検出手段により検出された動作による加速度に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別手段として機能させる。 In addition, the program according to the present invention includes an acceleration detection unit that detects an acceleration caused by an operation performed on the information processing terminal, and a user that places the information processing terminal on the right hand based on the acceleration caused by the operation detected by the acceleration detection unit. It is made to function as a holding hand discriminating means for discriminating which hand is held with the left hand.
また、本発明におけるプログラムは、情報処理端末を、情報処理端末に対してユーザにより振る動作が行われたときに、前記ユーザにより情報処理端末が振られた方向を検出する検出手段と、前記検出手段により検出された方向に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別手段として機能させる。 In addition, the program according to the present invention includes a detecting unit that detects a direction in which the information processing terminal is shaken by the user when the information processing terminal is shaken by the user. Based on the direction detected by the means, it is made to function as a holding hand discriminating means for discriminating whether the user holds the information processing terminal with the right hand or the left hand.
本発明により、ユーザの持ち手が右手と左手のどちらであるのかを判別することが可能になる。 According to the present invention, it is possible to determine whether the user's handle is the right hand or the left hand.
次に、本発明を実施するための形態について図面を参照して詳細に説明する。 Next, embodiments for carrying out the present invention will be described in detail with reference to the drawings.
<情報処理端末100の一般的な構成例>
一般的な情報処理端末100は、例えば、図1に示すように、CPU110と、メモリ120と、フラッシュメモリ130と、タッチパネル140と、加速度センサ150と、を有して構成される。CPU110は、メモリ120やフラッシュメモリ130に記憶されたOS(Operating System)やアプリケーションなどのプログラムを実行することにより、様々な処理を行う。<General configuration example of
A general
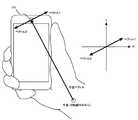
タッチパネル140は、CPU110による処理結果などを表示する表示手段であり、ユーザからの入力を受ける入力手段でもある。ユーザは、例えば、図2に示すように、指でタッチパネル表面を触れることにより、情報処理端末100に入力を行う。 The
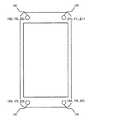
加速度センサ150は、情報処理端末100に掛かる加速度を検出する。加速度センサ150は、例えば、図3に示すような情報処理端末100の3軸方向のそれぞれに掛かる加速度を検出する。一般に、加速度センサ150により取得される加速度には、情報処理端末100に対する動作による加速度と、重力加速度と、が含まれている。そこで、以下では、「動作による加速度」により、「情報処理端末100に掛かる加速度」から「重力加速度」の成分を除去したものを表すことにする。つまり、「動作による加速度」により、情報処理端末100が回転、もしくは、移動することにより生じる加速度を表すことにする。 The
<第1の実施形態に係る情報処理端末100の構成例>
図4は、本発明の第1の実施形態に係る情報処理端末100の構成例を示す図である。本実施形態に係る情報処理端末100は、加速度検出手段210と、持ち手判別手段220と、を有して構成される。<Configuration example of
FIG. 4 is a diagram illustrating a configuration example of the
加速度検出手段210は、情報処理端末100に対する動作による加速度と、重力加速度と、を検出する。このとき、加速度検出手段210は、動作による加速度と重力加速度とを、情報処理端末100の3軸方向の成分として検出する。つまり、例えば、情報処理端末100に対して、図3に示すように、X軸、Y軸、Z軸の3軸を取ったときは、加速度検出手段210は、動作による加速度と重力加速度のそれぞれに対し、X軸方向の加速度と、Y軸方向の加速度と、Z軸方向の加速度と、を検出する。加速度検出手段210は、図1に示した構成例であれば、例えば、加速度センサ150と、CPU110がメモリ120やフラッシュメモリ120から読み出すプログラムと、により構成することができる。 The
上述したように、加速度センサ150により取得される加速度には、情報処理端末100に対する動作による加速度と、重力加速度と、が含まれている。そこで、加速度検出手段210は、この加速度センサ150が取得した加速度を、動作による加速度の成分と、重力加速度の成分と、に分離する。分離の方法としては、いろいろと存在する。例えば、ローパスフィルタやハイパスフィルタを使用した方法などがある。なお、加速度検出手段210を、動作による加速度と重力加速度とを分離して検出できる加速度センサ150により構成するようにしても良い。 As described above, the acceleration acquired by the
また、本実施形態において、情報処理端末100に対する動作による加速度には、動作軌道の接線方向成分だけでなく、向心方向成分も含まれている。本実施形態においては、情報処理端末100に対する動作による加速度のうち、接線方向成分をより多く用いることが望ましい。そのため、情報処理端末100に対する動作の開始時の加速度を検出することが望ましい。動作開始時の加速度をより多く用いるためには、例えば、上述のローパスフィルタやハイパスフィルタを使用して、加速度の大きさの変化が大きい時間帯のみ、加速度を検出する方法などがある。また、計算などによって、情報処理端末100に対する動作による加速度から向心方向成分を除去できる場合には、この向心方向成分が除去された加速度を用いるようにしても良い。このように加速度の向心方向成分を除去することにより、情報処理端末100を振る動作をより正確に検出することが可能になり、持ち手の判別をより正確に行うことが可能になる。 In the present embodiment, the acceleration due to the motion with respect to the
持ち手判別手段220は、動作による加速度に基づき、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、を判別する。持ち手判別手段230は、図1に示した構成例であれば、例えば、CPU110がメモリ120やフラッシュメモリ130から読み出すプログラムにより構成することができる。 The
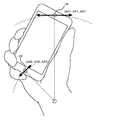
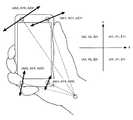
(1)図5は、ユーザが右手で情報処理端末100を持った状態を示す図である。この状態で、ユーザが情報処理端末100を、手首を中心に振ると、加速度検出手段210は、動作による加速度として、図5に示すように、手首の中心から加速度センサ150の設置位置への位置ベクトルに対して直角の方向の加速度(ベクトル1、ベクトル2)を動作による加速度として検出する。 (1) FIG. 5 is a diagram illustrating a state where the user holds the
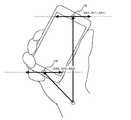
(2)図6は、ユーザが左手で情報処理端末100を持った状態を示す図である。この状態で、ユーザが情報処理端末100を、手首を中心に振ると、加速度検出手段210は、動作による加速度として、図6に示すように、加速度センサの手首の中心に対する位置ベクトルに対して直角の方向の加速度(ベクトル3、ベクトル4)を動作による加速度として検出する。 (2) FIG. 6 is a diagram illustrating a state where the user holds the
このように、ユーザが右手に情報処理端末100を持ったときと、ユーザが左手で情報処理端末100を持ったときと、では、加速度検出手段210により検出される動作による加速度の向きが異なる。 Thus, when the user holds the
そこで、第1の実施形態に係る持ち手判別手段220は、図3に示すような座標系を取ったときに、加速度検出手段210が検出した動作による加速度の向きが、XY平面の第1象限(X>0、Y>0)、または、第3象限(X<0、Y<0)のときは、ユーザが情報処理端末100を右手で持っていると判断する。つまり、加速度検出手段210が検出した動作による加速度のXY成分(AX、AY)が、「AX>0かつAY>0」であるか、「AX<0かつAY<0」であるときに、持ち手判別手段220は、ユーザが情報処理端末100を右手で持っていると判断する。 Therefore, the
また、持ち手判別手段220は、図3に示すような座標系を取ったときに、動作による加速度の向きが、第2象限(X<0、Y>0)、または、第4象限(X>0、Y<0)のときは、ユーザが情報処理端末100を左手で持っていると判断する。つまり、加速度検出手段210が検出した動作による加速度のXY成分(AX、AY)が、「AX<0かつAY>0」であるか、「AX>0かつAY<0」であるときに、持ち手判別手段220は、ユーザが情報処理端末100を左手で持っていると判断する。 Further, when the
このように、本実施形態では、情報処理端末100に対する動作による加速度に基づき、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、を判別することができる。近年の情報処理端末100は、別の用途のために加速度センサ150を搭載している。このため、本実施形態によれば、新たな部品を追加することなく、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、の判別を行うことができるようになる。 Thus, in the present embodiment, it is possible to determine whether the user is holding the
また、情報処理端末100を振る動作は、例えば、ユーザがポケットやカバンから情報処理端末100を取り出す際に、ユーザが意図することなく行われる。このため、本実施形態を用いることで、ユーザに意識させることなく、自動的にユーザの持ち手の判別を行うことができ、ユーザを煩わせることがない。 The operation of shaking the
また、本実施形態によるユーザの持ち手の判別結果を用いることで、タッチパネルなどの表示を、ユーザの持ち手に適した表示に自動的に切り替えることが可能になる。例えば、スマートフォンなどの小型の情報処理端末であれば、本実施形態によるユーザの持ち手の判別結果を用い、情報処理端末を持った手での操作を容易にするような表示を行うようにすると良い。また、タブレットPCなどの大型の情報処理端末や、タッチペンを使用して入力を行う情報処理端末などであれば、本実施形態によるユーザの持ち手の判別結果を用い、情報処理端末を持った手とは逆の手での操作を容易にするような表示を行うようにすると良い。 Further, by using the determination result of the user's handle according to the present embodiment, it is possible to automatically switch the display of the touch panel or the like to a display suitable for the user's handle. For example, if the information processing terminal is a small information processing terminal such as a smartphone, the result of the determination of the user's handle according to the present embodiment is used to perform a display that facilitates the operation with the hand holding the information processing terminal. good. In addition, if the information processing terminal is a large information processing terminal such as a tablet PC, or an information processing terminal that performs input using a touch pen, the hand holding the information processing terminal using the determination result of the user's handle according to the present embodiment. It is preferable to perform a display that facilitates the operation with the opposite hand.
なお、加速度検出手段210により、加速度の大きさも検出するようにし、検出された加速度の大きさが所定の値よりも大きいときだけに、上記のユーザの持ち手の判別を行うようにしても良い。このようにすることにより、ユーザの移動などによる加速度など、ユーザが情報処理端末100を振る動作以外の加速度により、ユーザの持ち手の判別を行うことを避けることができるようになる。 It should be noted that the acceleration detection means 210 may also detect the magnitude of acceleration, and the above-described determination of the user's handle may be performed only when the detected acceleration magnitude is greater than a predetermined value. . By doing so, it becomes possible to avoid the determination of the user's handle by the acceleration other than the operation of shaking the
また、上記では、手首を中心に振る動作を行った際を例に説明したが、ひじや肩を中心とした振る動作であっても、上記と同様の方法により、ユーザの持ち手の判別を行うことが可能である。 Further, in the above description, the case of performing the motion of swinging around the wrist has been described as an example. However, even with the motion of swinging around the elbow or shoulder, the user's hand is discriminated by the same method as described above. Is possible.
また、上述した本実施形態におけるユーザの持ち手の判別方法は、情報処理端末100に対する動作方向についての情報を得られれば、その情報を用いて、持ち手の判別を行うことができる。よって、本実施形態は、情報処理端末100に対する動作方向についての情報として加速度以外の情報を得る手段(例えば、速度方向の情報を得る手段など)を有するようにし、その情報を用いて持ち手の判別を行うようにしても良い。 Moreover, if the information on the operation direction with respect to the
また、振る動作は、回転動作であるため、回転の中心向きの力である向心力も掛かる。よって、振る動作の状況によっては、回転軌道の接線方向の加速度に比べ、向心方向の加速度が大きくなることがある。接線方向の加速度の大きさは、(回転中心からの距離)×(角速度の加速度)であり、向心方向の加速度の大きさは、(回転中心からの距離)×(角速度)2であるので、角速度の加速度が小さく、角速度が大きい状況などでは、このようなことが起こり得る。このようなときは、第1象限と第2象限のみを用いて判断する方法が考えられる。この方法であれば、右手で振った場合は、図5に示したベクトル1のみを用い、左手で振った場合は、図6に示したベクトル4のみを用いて持ち手の判別をすることになる。一般的に、振る動作を行う場合、ユーザが情報処理端末100を一方向のみに移動させることはなく、止める動作も入る。このため、加速度検出手段210は、情報処理端末100の動き出すときか、止まるときか、のどちらかで、ベクトル1方向の加速度、または、ベクトル4方向の加速度、を検出することになる。よって、この方法によっても、上記と同様に、情報処理端末100に対する動作による加速度に基づき、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、の判別を行うことができる。Further, since the shaking motion is a rotational motion, a centripetal force that is a force toward the center of rotation is also applied. Therefore, depending on the state of the swinging operation, the centripetal acceleration may be larger than the tangential acceleration of the rotating trajectory. The magnitude of acceleration in the tangential direction is (distance from the center of rotation) x (acceleration of angular velocity), and the magnitude of acceleration in the centripetal direction is (distance from the center of rotation) x (angular velocity)2 This can happen in situations where the angular velocity acceleration is small and the angular velocity is large. In such a case, it is conceivable to make a determination using only the first quadrant and the second quadrant. In this method, when shaking with the right hand, only the vector 1 shown in FIG. 5 is used, and when shaking with the left hand, the holding hand is discriminated using only the vector 4 shown in FIG. Become. In general, when performing a shaking operation, the user does not move the
<第1の実施形態に係る情報処理端末100における処理動作例>
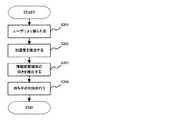
図7を参照しながら、本発明の第1の実施形態に係る情報処理端末100における処理動作例を説明する。<Example of Processing Operation in
A processing operation example in the
ユーザにより情報処理端末100が振られる(S101)。加速度検出手段210が、情報処理端末100に対する動作による加速度を検出する(S102)。持ち手判別手段220が、動作による加速度の向きに基づき、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、を判別する(S103)。 The
<第2の実施形態に係る情報処理端末100の構成例>
図8、図9に示すように、情報処理端末100を横向きに持ったときは、図5、図6に示すように、情報処理端末100を縦向きに持ったときと、では、ユーザが振ったときに情報処理端末100に掛かる加速度の向きが変わる。つまり、様々な向きで使用できる情報処理端末100には、上記のような、動作による加速度のXY成分のみを用いて、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、を判別する方法は適用できない。<Configuration Example of
As shown in FIGS. 8 and 9, when the
そこで、第2の実施形態に係る情報処理端末100は、図4に示した第1の実施形態に係る情報処理端末100の構成に加え、図10に示すように、向き検出手段230を有するようにする。 Therefore, in addition to the configuration of the
向き検出手段230は、加速度検出手段210により検出された重力加速度に基づき、情報処理端末100の向きを検出する。例えば、図3に示すように座標軸を取ったときであれば、重力加速度の大きさのY成分がX成分より大きく、向きがY軸に関してマイナスであるならば、情報処理端末100が、図3に示すような向きであることを判別できる。 The
そして、第2の実施形態に係る持ち手判別手段220は、動作による加速度と情報処理端末100の向きとに基づき、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、を判別する。 Whether the user has the
(3)図8は、情報処理端末100が横向きのときに、ユーザが右手で情報処理端末100を持った状態を示す図である。この状態で、ユーザが情報処理端末100を、手首を中心に振ると、加速度検出手段210は、動作による加速度として、図8に示すように、手首の中心から加速度センサ150の設置位置への位置ベクトルに対して直角の方向に加速度(ベクトル5、ベクトル6)を動作による加速度として検出する。 (3) FIG. 8 is a diagram illustrating a state in which the user holds the
(4)図9は、情報処理端末100が横向きのときに、ユーザが左手で情報処理端末100を持った状態を示す図である。この状態で、ユーザが情報処理端末100を、手首を中心に振ると、加速度検出手段210は、動作による加速度として、図9に示すように、手首の中心から加速度センサ150の設置位置への位置ベクトルに対して直角の方向に加速度(ベクトル7、ベクトル8)を動作による加速度として検出する。 (4) FIG. 9 is a diagram illustrating a state where the user holds the
そこで、第2の実施形態に係る持ち手判別手段220は、情報処理端末100が横向きのときは、図3に示すような座標系を取ったときに、加速度検出手段210が検出した動作による加速度の向きが、XY平面の第2象限(X<0、Y>0)、または、第4象限(X>0、Y<0)のときは、ユーザが情報処理端末100を右手で持っていると判断する。つまり、加速度検出手段210が検出した動作による加速度のXY成分(AX、AY)が、「AX<0かつAY>0」であるか、「AX>0かつAY<0」であるときに、持ち手判別手段220は、ユーザが情報処理端末100を右手で持っていると判断する。 Therefore, the
また、第2の実施形態に係る持ち手判別手段220は、情報処理端末100が横向きのときは、図3に示すような座標系を取ったときに、動作による加速度の向きが、第1象限(X>0、Y>0)、または、第3象限(X<0、Y<0)のときは、ユーザが情報処理端末100を左手で持っていると判断する。つまり、加速度検出手段210が検出した動作による加速度のXY成分(AX、AY)が、「AX>0かつAY>0」であるか、「AX<0かつAY<0」であるときに、持ち手判別手段220は、ユーザが情報処理端末100を左手で持っていると判断する。 In addition, when the
また、第2の実施形態に係る持ち手判別手段220は、情報処理端末100が縦向きのときは、上述した第1の実施形態に係る持ち手判別手段200と同様の方法により、ユーザの持ち手の判別を行う。 In addition, when the
このようにすることにより、様々な向きで使用できる情報処理端末100に対しても、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、を判別することができるようになる。 In this way, it is possible to determine whether the user holds the
<第2の実施形態に係る情報処理端末100における処理動作例>
図11を参照しながら、本発明の第2の実施形態に係る情報処理端末100における処理動作例を説明する。<Example of Processing Operation in
An example of the processing operation in the
ユーザにより情報処理端末100が振られる(S201)。加速度検出手段210が、情報処理端末100に対する動作による加速度と重力加速度とを検出する(S202)。向き検出手段230が、重力加速度に基づき、情報処理端末100の向きを検出する(S203)。持ち手判別手段220が、動作による加速度と情報処理端末100の向きとに基づき、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、を判別する(S204)。 The
<第3の実施形態に係る情報処理端末100の構成例>
第1の実施形態や第2の実施形態に係る情報処理端末100では、図12に示すような回転動作と、図13に示すような水平移動動作と、を判別することができない。つまり、情報処理端末100に対する動作が振る動作であるのか、振る動作以外の動作であるのか、を判別することができない。そこで、本発明の第3の実施形態に係る情報処理端末100は、加速度センサ150を2箇所に設置することで、この判別を可能にする。<Configuration example of
In the
第3の実施形態では、例えば、図14に示すように、(X1、Y1、Z1)と(X2、Y2、Z2)との2箇所に加速度センサ150を設置する。第3の実施形態において、加速度センサ150が設置される2箇所の位置は、ユーザが情報処理端末100を持ったときに、手首からの距離が異なる値になるような位置であれば、情報処理端末100のどの位置であっても良い。 In the third embodiment, for example, as shown in FIG. 14,
図15は、本発明の第3の実施形態に係る情報処理端末100の構成例である。第3の実施形態に係る情報処理端末300は、第1の実施形態に係る情報処理端末100の構成に加え、差分算出手段240を有している。 FIG. 15 is a configuration example of an
第3の実施形態に係る加速度検出手段210は、情報処理端末100の2箇所に設置された加速度センサ150それぞれの取得した加速度を用いて、加速度センサ150が設置された2箇所における動作による加速度の3軸方向の成分を検出する。つまり、第3の実施形態に係る加速度検出手段210は、図14の例であれば、(X1、Y1、Z1)での動作による加速度(Ax1、Ay1、Az1)と、(X2、Y2、Z2)での動作による加速度(Ax2、Ay2、Az2)と、を検出する。 The
また、第3の実施形態に係る加速度検出手段210は、この3軸方向の成分を用いて、加速度センサ150が設置された2箇所における動作による加速度の大きさも検出する。つまり、第3の実施形態に係る加速度検出手段210は、図14の例であれば、(X1、Y1、Z1)での動作による加速度の大きさ(Ax12+Ay12+Az12)1/2と、(X2、Y2、Z2)での動作による加速度の大きさ(Ax22+Ay22+Az22)1/2と、を検出する。Moreover, the acceleration detection means 210 which concerns on 3rd Embodiment detects the magnitude | size of the acceleration by the operation | movement in two places where the
差分算出手段240は、加速度検出手段210により検出された加速度センサ150が設置された2箇所における動作による加速度の大きさの間の差分を算出する。つまり、差分算出手段240は、図14の例であれば、(X1、Y1、Z1)での動作による加速度の大きさ(Ax12+Ay12+Az12)1/2と、(X2、Y2、Z2)での動作による加速度の大きさ(Ax22+Ay22+Az22)1/2と、の差分として、例えば、(Ax12+Ay12+Az12)1/2−(Ax22+Ay22+Az22)1/2を算出する。なお、差分算出手段240は、図1に示した構成例であれば、例えば、CPU110がメモリ120やフラッシュメモリ130から読み出すプログラムにより構成することができる。The
このとき、情報処理端末100に対する動作が回転動作であるならば、図16に示すように、加速度センサ150が設置された2箇所は回転中心からの距離が異なるので、この加速度センサ150が設置された2箇所における動作による加速度、つまり、回転動作による加速度は、異なる値になる。よって、回転動作のときに差分算出手段240により算出される加速度の大きさの差分は、ゼロではない。つまり、情報処理端末100に振る動作が行われたときは、差分算出手段240により算出される加速度の大きさの差分は、ゼロではない。 At this time, if the operation with respect to the
一方、情報処理端末100に対する動作が水平移動動作であるならば、図17に示すように、加速度センサ150が設置された2箇所における動作による加速度、つまり、水平移動動作による加速度は、同じ値になる。このため、水平移動動作のときに差分算出手段240により算出される加速度の大きさの差分は、ゼロとなる。なお、実際は、振る動作以外の動作のときも、検出される加速度には、水平移動動作による成分だけでなく、回転動作による成分も含まれることが想定されるため、振る動作以外の動作のときも、差分算出手段240により算出される加速度の大きさの差分が、厳密にゼロになるわけではないと想定される。 On the other hand, if the operation with respect to the
そこで、第3の実施形態では、この差分算出手段240により算出された加速度の大きさの差分に基づいて、情報処理端末100に対して振る動作が行われたのか、振る動作以外の動作が行われたのか、を判別する。このとき、加速度の大きさの差分がゼロでないときに、情報処理端末100に対して振る動作が行われたと判断し、加速度の大きさの差分がゼロであるときに、情報処理端末100に対して振る動作以外の動作が行われたと判断する。また、上述したように、振る動作以外の動作のときも、差分算出手段240により算出される加速度の大きさの差分が、厳密にゼロになるわけではないことが想定される。そこで、加速度の大きさの差分が所定の値を超えたときに、情報処理端末100に対して振る動作が行われたと判断し、加速度の大きさの差分が所定の値以下であるときに、情報処理端末100に対して振る動作以外の動作が行われたと判断するようにしても良い。 Therefore, in the third embodiment, based on the difference in the magnitude of acceleration calculated by the
そして、第3の実施形態では、情報処理端末100に対して振る動作が行われたと判断したときに、持ち手判別手段220により、動作による加速度に基づき、上述したような方法により、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、を判別する。このとき、判別に用いる動作による加速度は、2箇所に設置された加速度センサ150が検出した加速度のうちのどちらの加速度であっても良い。 In the third embodiment, when it is determined that a motion of shaking is performed on the
このようにすることにより、情報処理端末100が振られたときにだけ、ユーザの持ち手の判別を行うため、持ち手の判別において、情報処理端末100を振る動作以外の動作により、誤った判別を行ってしまうことを避けることが可能になる。 In this way, since the user's handle is determined only when the
また、第3の実施形態では、図16に示すように、加速度センサ150の設置された2箇所のうち、加速度の小さいほうの位置の方向に回転動作の中心が位置することが推定できる。例えば、持ち手判別手段220は、持ち手の判別の際に、この推定された方向も用いるようにしても良い。 Moreover, in 3rd Embodiment, as shown in FIG. 16, it can be estimated that the center of rotational operation is located in the direction of the position where acceleration is smaller among two places where the
<第3の実施形態に係る情報処理端末100における処理動作例>
図18を参照しながら、本発明の第3の実施形態に係る情報処理端末100における処理動作例を説明する。<Example of Processing Operation in
A processing operation example in the
ユーザにより情報処理端末100が振られる(S301)。加速度検出手段210が、情報処理端末100の加速度センサ150が設置された2箇所における動作による加速度の3軸成分と加速度の大きさとを検出する(S302)。差分算出手段240が、2箇所で検出された加速度の大きさの差分を算出する(S303)。加速度の大きさの差分が所定の値を超えている(または、加速度の大きさの差分がゼロではない)とき(S304、Yes)、持ち手判別手段230が、動作による加速度に基づき、ユーザが情報処理端末100を右手で持っているのか、左手で持っているかの、を判別する(S305)。 The
<第4の実施形態に係る情報処理端末100の構成例>
第1の実施形態と第2の実施形態と第3の実施形態とでは、2軸方向の加速度の成分を用いて、ユーザが情報処理端末100を右手で持っているのか、左手で持っているかの、を判別する。第4の実施形態では、加速度センサ150を三箇所以上に設置し、この設置位置での動作による加速度の大きさに基づき、回転動作の中心の位置を推定し、この推定された回転動作の中心の位置に基づき、ユーザが情報処理端末100を右手で持っているのか、左手で持っているかの、を判別する。<Configuration Example of
In the first embodiment, the second embodiment, and the third embodiment, whether the user holds the
以下では、第4の実施形態の一例として、例えば、図19に示すように、(X1、Y1、Z1)と(X2、Y2、Z2)と(X3、Y3、Z3)と(X4、Y4、Z4)との4箇所に加速度センサ150を設置した場合を考える。 In the following, as an example of the fourth embodiment, for example, as shown in FIG. 19, (X1, Y1, Z1), (X2, Y2, Z2), (X3, Y3, Z3), and (X4, Y4, Consider the case where the
図20は、第4の実施形態に係る情報処理端末100の構成例を示す図である。第4の実施形態に係る情報処理端末100は、第1の実施形態の構成に加え、中心推定手段250を有している。 FIG. 20 is a diagram illustrating a configuration example of the
第4の実施形態に係る加速度検出手段210は、情報処理端末100の4箇所に設置された加速度センサ150それぞれの取得した加速度を用いて、加速度センサ150が設置された四箇所での動作による加速度の3軸方向の成分を検出する。つまり、第4の実施形態に係る加速度検出手段210は、図19の例であれば、(X1、Y1、Z1)での動作による加速度(Ax1、Ay1、Az1)と、(X2、Y2、Z2)での動作による加速度(Ax2、Ay2、Az2)と、(X3、Y3、Z3)での動作による加速度(Ax3、Ay3、Az3)と、(X4、Y4、Z4)での動作による加速度(Ax4、Ay4、Az4)と、を検出する。 The
また、第4の実施形態に係る加速度検出手段210は、この3軸方向の成分を用いて、加速度センサ150が設置された4箇所での動作による加速度の大きさも検出する。つまり、第4の実施形態に係る加速度検出手段210は、図19の例であれば、(X1、Y1、Z1)での動作による加速度の大きさ(Ax12+Ay12+Az12)1/2と、(X2、Y2、Z2)での動作による加速度の大きさ(Ax22+Ay22+Az22)1/2と、(X3、Y3、Z3)での動作による加速度の大きさ(Ax32+Ay32+Az32)1/2と、(X4、Y4、Z4)での動作による加速度の大きさ(Ax42+Ay42+Az42)1/2と、を検出する。Moreover, the acceleration detection means 210 which concerns on 4th Embodiment also detects the magnitude | size of the acceleration by the operation | movement in four places in which the
また、第4の実施形態に係る加速度検出手段210は、情報処理端末100に掛かる重力加速度の3軸方向の成分を検出する。このとき、重力加速度を検出するのに、4箇所に設置された加速度センサ150すべてを用いても良いし、4箇所のうちの1箇所に設置された加速度センサ150のみを用いても良い。 Moreover, the acceleration detection means 210 which concerns on 4th Embodiment detects the component of the triaxial direction of the gravity acceleration concerning the
そして、中心推定手段250は、第4の実施形態に係る加速度検出手段210により検出された4箇所の加速度の大きさを用いて、回転動作の中心の位置を推定する。4箇所の加速度センサ150の設置位置のうちで、動作による加速度の値が最も小さい設置位置を含む象限に中心が存在すると推定する。例えば、図21に示すように回転している場合は、(X4、Y4、Z4)の位置での動作による加速度の大きさが4箇所の加速度のうちで最も小さい。よって、この場合は、加速度センサ150の4箇所の設置位置をXY平面において4つの象限に分けたときに、(X4、Y4、Z4)が位置する象限に回転動作の中心が位置することが推定されることになる。つまり、図21の例では、XY平面の第4象限(X>0、Y<0)に回転動作の中心が位置することが推定されることになる。 Then, the
そして、第4の実施形態に係る持ち手判別手段220は、加速度検出手段210により検出された重力加速度の3軸方向の成分と、中心推定手段250に推定された回転動作の中心の位置と、に基づき、ユーザが情報処理端末100を右手で持っているのか、左手で持っているのか、を判別する。例えば、図21に示した例であれば、XY平面の第4象限に回転動作の中心が位置するので、ユーザは右手で情報処理端末100を持っていると判別する。 Then, the
また、様々な向きで使用できる情報処理端末100に対しては、第2の実施形態同様、向き検出手段230を備えるようにし、持ち手判別手段220は、情報処理端末100の向きの情報と、中心推定手段250により推定された回転動作の中心の位置の情報と、に基づき、判別を行うようにすると良い。 Further, the
例えば、図21に示すように、情報処理端末100の上下方向がY軸方向であり、XY平面の第4象限に回転動作の中心が存在するときは、持ち手判別手段220は、ユーザが右手で情報処理端末100を持っていると判別する。 For example, as shown in FIG. 21, when the vertical direction of the
一方、例えば、図22に示すように、情報処理端末100の上下方向がX軸方向であり、XY平面の第4象限に回転動作の中心が存在するときは、持ち手判別手段220は、ユーザが左手で情報処理端末100を持っていると判別する。 On the other hand, as shown in FIG. 22, for example, when the vertical direction of the
また、例えば、図23に示すように、情報処理端末100の上下方向がY軸方向であり、XY平面の第3象限に回転動作の中心が存在するときは、持ち手判別手段220は、ユーザが左手で情報処理端末100を持っていると判別する。 Also, for example, as shown in FIG. 23, when the vertical direction of the
また、例えば、図24に示すように、情報処理端末100の上下方向がX軸方向であり、XY平面の第3象限に回転動作の中心が存在するときは、持ち手判別手段220は、ユーザが右手で情報処理端末100を持っていると判別する。 For example, as shown in FIG. 24, when the vertical direction of the
第4の実施形態では、動作の加速度の大きさを用いているため、操作面(タッチパネルが設置される面)に垂直な方向(図3の座標系におけるZ方向)に振る動作であっても、ユーザが右手と左手のどちらの手で情報処理端末100を持っているのかを判別することができる。 In the fourth embodiment, since the magnitude of the motion acceleration is used, even if the motion is shaken in a direction (Z direction in the coordinate system of FIG. 3) perpendicular to the operation surface (surface on which the touch panel is installed). It is possible to determine whether the user holds the
よって、第4の実施形態により、情報処理端末100をどの方向に振られたとしても、持ち手の判別を行うことができるようになる。 Therefore, according to the fourth embodiment, the holding hand can be determined regardless of which direction the
なお、上記では、加速度センサ150を4箇所に設置した場合を説明したが、加速度センサ150を三箇所に設置した場合も、回転動作の中心の位置の推定を行うことができる。加速度センサ150を三箇所に設置した場合は、三箇所での加速度の大きさの、大きさの順番を用いることにより、回転動作の中心の位置が4つの象限のうちのどの象限に位置するかを推定することが可能になる。また、上記では、図3に示すような薄板型の情報処理端末について説明したが、立体型の情報処理端末の場合には、回転動作の中心の位置を推定するためには、最低4箇所に加速度センサ150を設置し、4箇所の加速度を検出する必要がある。このときも、検出された加速度の大きさの順番を用いることにより、持ち手の判別が可能である。 In addition, although the case where the
また、第3の実施形態に同様に、差分算出手段240を備えるようにし、設置された加速度センサのうちの2箇所における動作による加速度の大きさの差分を算出し、上記と同様に、加速度の大きさの差分が所定の値を超えている(または、加速度の大きさの差分がゼロではない)ときのみ、中心推定手段250による回転動作の中心位置の推定、持ち手判別手段220によるユーザの持ち手の判別、を行うようにしても良い。 Similarly to the third embodiment, the difference calculating means 240 is provided to calculate the difference in the magnitude of the acceleration due to the operation at two locations of the installed acceleration sensors. Only when the magnitude difference exceeds a predetermined value (or when the acceleration magnitude difference is not zero), the center estimation means 250 estimates the center position of the rotational motion, and the handle discrimination means 220 determines the user's The holding hand may be discriminated.
<第4の実施形態に係る情報処理端末100における処理動作例>
図25を参照しながら、本発明の第4の実施形態に係る情報処理端末100における処理動作例を説明する。<Example of Processing Operation in
An example of processing operation in the
ユーザにより情報処理端末100が振られる(S401)。加速度検出手段210が、情報処理端末100の加速度センサ150が設置された位置における動作による加速度の大きさを検出する(S402)。中心推定手段250が、加速度センサ150が設置された位置における動作による加速度の大きさに基づき、回転動作の中心の位置を推定する(S403)。持ち手判別手段230が、推定された回転動作の中心の位置に基づき、ユーザが情報処理端末100を右手で持っているのか、左手で持っているかの、を判別する(S404)。 The
上述した実施形態における処理動作は、ハードウェア、または、ソフトウェア、あるいは、両者の複合構成によって実行することも可能である。 The processing operation in the above-described embodiment can be executed by hardware, software, or a combined configuration of both.
なお、ソフトウェアによる処理を実行する場合には、処理シーケンスを記録したプログラムが格納されているROM(Read Only Memory)から、コンピュータ内のメモリ(RAM)にプログラムを読み込んで実行させることが可能である。 When executing processing by software, it is possible to read and execute a program from a ROM (Read Only Memory) storing a program recording a processing sequence to a memory (RAM) in a computer. .
例えば、プログラムは、記録媒体としてのハードディスクやROMに予め記録しておくことが可能である。あるいは、プログラムは、フロッピー(登録商標)ディスク等の磁気ディスク、CD(Compact Disc)、DVD(Digital Versatile Disc)等の光ディスク、MO(Magneto Optical)ディスク等の光磁気ディスクなどのリムーバブル記録媒体に、一時的、あるいは、永続的に格納(記録)しておくことが可能である。 For example, the program can be recorded in advance on a hard disk or ROM as a recording medium. Alternatively, the program is stored on a removable recording medium such as a magnetic disk such as a floppy (registered trademark) disk, an optical disk such as a CD (Compact Disc) or DVD (Digital Versatile Disc), or a magneto-optical disk such as an MO (Magneto Optical) disk. It is possible to store (record) temporarily or permanently.
このようなリムーバブル記録媒体は、いわゆるパッケージソフトウェアとして提供することが可能である。 Such a removable recording medium can be provided as so-called package software.
なお、プログラムは、上述したようなリムーバブル記録媒体からコンピュータにインストールする他、ダウンロードサイトから、コンピュータに無線転送したり、LAN(Local Area Network)、インターネットといったネットワークを介して、コンピュータに有線で転送したりし、コンピュータでは、転送されてきたプログラムを受信し、内蔵するハードディスク等の記録媒体にインストールすることが可能である。 The program is installed on the computer from the above-described removable recording medium, transferred wirelessly from the download site to the computer, or transferred to the computer via a network such as a LAN (Local Area Network) or the Internet. On the other hand, the computer can receive the transferred program and install it on a recording medium such as a built-in hard disk.
また、上記実施形態で説明した処理動作に従って時系列的に実行されるのみならず、処理を実行する装置の処理能力、あるいは、必要に応じて並列的にあるいは個別に実行するように構築することも可能である。 In addition to being executed in time series in accordance with the processing operations described in the above embodiment, the processing capability of the apparatus that executes the processing, or a configuration to execute in parallel or individually as necessary Is also possible.
また、上記実施形態で説明したシステムは、複数の装置の論理的集合構成にしたり、各装置の機能を混在させたりするように構築することも可能である。 In addition, the system described in the above embodiment can be configured to have a logical set configuration of a plurality of devices or to mix the functions of each device.
以上、本発明の好適な実施の形態により本発明を説明した。ここでは特定の具体例を示して本発明を説明したが、特許請求の範囲に定義された本発明の広範囲な趣旨および範囲から逸脱することなく、これら具体例に様々な修正および変更が可能である。 The present invention has been described above by the preferred embodiments of the present invention. While the invention has been described with reference to specific embodiments thereof, various modifications and changes can be made to these embodiments without departing from the broader spirit and scope of the invention as defined in the claims. is there.
また、本発明における情報処理端末は、前記持ち手判別手段は、前記加速度検出手段により検出された動作による加速度の向きに基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 Further, in the information processing terminal according to the present invention, the user's own hand is held by either the right hand or the left hand based on the direction of acceleration by the operation detected by the acceleration detecting means. You may make it discriminate | determine.
また、本発明における情報処理端末は、自機に掛かる重力加速度により自機の向きを検出する向き検出手段をさらに有し、前記加速度検出手段は、自機に掛かる重力加速度も検出し、前記持ち手判別手段は、前記加速度検出手段により検出された動作による加速度の向きと、前記向き検出手段により検出された自機の向きと、に基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 The information processing terminal according to the present invention further includes a direction detecting unit that detects a direction of the own device based on a gravitational acceleration applied to the own device, and the acceleration detecting unit also detects the gravitational acceleration applied to the own device, and The hand discriminating means is configured so that the user holds his / her own hand with either the right hand or the left hand based on the direction of acceleration detected by the acceleration detecting means and the orientation of the own equipment detected by the orientation detecting means. You may make it discriminate | determine whether it has in.
また、本発明における情報処理端末は、前記加速度検出手段は、自機の2箇所において自機に対する動作による加速度を検出し、前記持ち手判別手段は、前記加速度検出手段により検出された2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うようにしても良い。 Further, in the information processing terminal according to the present invention, the acceleration detection unit detects acceleration due to an operation on the own device at two locations of the own device, and the handle determination unit is detected at the two locations detected by the acceleration detection device. The determination may be performed when the difference in acceleration due to movement is greater than a predetermined value.
また、本発明における情報処理端末は、前記加速度検出手段は、自機の3箇所以上の位置において自機に対する動作による加速度を検出し、前記持ち手判別手段は、前記加速度検出手段により検出された動作による加速度の大きさの順番に基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 Further, in the information processing terminal according to the present invention, the acceleration detection unit detects acceleration due to an operation on the own device at three or more positions of the own device, and the handle determination unit is detected by the acceleration detection unit. Based on the order of the magnitude of acceleration due to the movement, it may be determined whether the user is holding his / her own device with the right hand or the left hand.
また、本発明における情報処理端末は、自機に掛かる重力加速度により自機の向きを検出する向き検出手段をさらに有し、前記加速度検出手段は、自機に掛かる重力加速度も検出し、前記持ち手判別手段は、前記加速度検出手段により検出された動作による加速度の大きさの順番と、前記向き検出手段により検出された自機の向きと、に基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 The information processing terminal according to the present invention further includes a direction detecting unit that detects a direction of the own device based on a gravitational acceleration applied to the own device, and the acceleration detecting unit also detects the gravitational acceleration applied to the own device, and The hand discriminating means is configured so that the user holds his / her own device between the right hand and the left hand based on the order of the magnitude of acceleration by the operation detected by the acceleration detecting device and the orientation of the own device detected by the orientation detecting device. You may make it discriminate | determine with which hand it has.
また、本発明における情報処理端末は、前記持ち手判別手段は、前記加速度検出手段により検出された動作による加速度のうちの2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うようにしても良い。 In the information processing terminal according to the present invention, the handle determining unit may determine the determination when the difference in acceleration due to the motion at two locations out of the acceleration due to the motion detected by the acceleration detection unit is larger than a predetermined value. May be performed.
また、本発明における持ち手判別方法は、前記持ち手判別ステップは、前記加速度検出ステップにより検出された動作による加速度の向きに基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 Further, in the holding hand determination method according to the present invention, in the holding hand determination step, the user holds the information processing terminal with either the right hand or the left hand based on the direction of acceleration by the operation detected by the acceleration detection step. You may make it discriminate | determine whether it is.
また、本発明における持ち手判別方法は、情報処理端末に掛かる重力加速度により情報処理端末の向きを検出する向き検出ステップをさらに有し、前記加速度検出ステップは、情報処理端末に掛かる重力加速度も検出し、前記持ち手判別ステップは、前記加速度検出ステップにより検出された動作による加速度の向きと、前記向き検出ステップにより検出された情報処理端末の向きと、に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 In addition, the handle determination method according to the present invention further includes a direction detection step of detecting a direction of the information processing terminal based on gravitational acceleration applied to the information processing terminal, and the acceleration detection step also detects gravitational acceleration applied to the information processing terminal. In the holding hand determining step, the user moves the information processing terminal to the right hand based on the direction of the acceleration due to the operation detected in the acceleration detecting step and the direction of the information processing terminal detected in the direction detecting step. You may make it discriminate | determine which hand is holding with the left hand.
また、本発明における持ち手判別方法は、前記加速度検出ステップは、情報処理端末の2箇所において情報処理端末に対する動作による加速度を検出し、前記持ち手判別ステップは、前記加速度検出ステップにより検出された2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うようにしても良い。 Further, in the handle determination method according to the present invention, the acceleration detection step detects acceleration due to an operation on the information processing terminal at two locations of the information processing terminal, and the handle determination step is detected by the acceleration detection step. The determination may be performed when the difference in acceleration due to the motion at the two locations is larger than a predetermined value.
また、本発明における持ち手判別方法は、前記加速度検出ステップは、情報処理端末の3箇所以上の位置において情報処理端末に対する動作による加速度を検出し、前記持ち手判別ステップは、前記加速度検出ステップにより検出された動作による加速度の大きさの順番に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 In the holding hand determination method according to the present invention, the acceleration detection step detects acceleration due to an operation on the information processing terminal at three or more positions of the information processing terminal, and the holding hand determination step includes the acceleration detection step. Based on the order of the magnitude of acceleration due to the detected motion, it may be determined whether the user holds the information processing terminal with the right hand or the left hand.
また、本発明における持ち手判別方法は、情報処理端末に掛かる重力加速度により情報処理端末の向きを検出する向き検出ステップをさらに有し、前記加速度検出ステップは、情報処理端末に掛かる重力加速度も検出し、前記持ち手判別ステップは、前記加速度検出ステップにより検出された動作による加速度の大きさの順番と、前記向き検出ステップにより検出された情報処理端末の向きと、に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 In addition, the handle determination method according to the present invention further includes a direction detection step of detecting a direction of the information processing terminal based on gravitational acceleration applied to the information processing terminal, and the acceleration detection step also detects gravitational acceleration applied to the information processing terminal. In the holding hand determining step, the user can change the information processing terminal based on the order of the magnitude of the acceleration by the operation detected in the acceleration detecting step and the direction of the information processing terminal detected in the direction detecting step. It may be determined whether the hand is held by the right hand or the left hand.
また、本発明における持ち手判別方法は、前記持ち手判別ステップは、前記加速度検出ステップにより検出された動作による加速度のうちの2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うようにしても良い。 Further, in the holding hand determination method according to the present invention, the holding hand determination step is performed when the difference in acceleration due to the motion at two locations out of the acceleration due to the motion detected by the acceleration detection step is greater than a predetermined value. You may make it discriminate | determine.
また、本発明におけるプログラムは、前記持ち手判別手段は、前記加速度検出手段により検出された動作による加速度の向きに基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 In the program according to the present invention, based on the direction of acceleration caused by the motion detected by the acceleration detecting means, the user hand holding means determines whether the user holds the information processing terminal with the right hand or the left hand. You may make it discriminate | determine.
また、本発明におけるプログラムは、情報処理端末を、情報処理端末に掛かる重力加速度により情報処理端末の向きを検出する向き検出手段としても機能させ、前記加速度検出手段は、情報処理端末に掛かる重力加速度も検出し、前記持ち手判別手段は、前記加速度検出手段により検出された動作による加速度の向きと、前記向き検出手段により検出された情報処理端末の向きと、に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 The program according to the present invention also causes the information processing terminal to function as a direction detection unit that detects the direction of the information processing terminal based on the gravitational acceleration applied to the information processing terminal. The holding hand determining means detects the information processing terminal based on the direction of acceleration by the operation detected by the acceleration detecting means and the direction of the information processing terminal detected by the direction detecting means. You may make it discriminate | determine whether it is holding with the right hand or the left hand.
また、本発明におけるプログラムは、前記加速度検出手段は、情報処理端末の2箇所において情報処理端末に対する動作による加速度を検出し、前記持ち手判別手段は、前記加速度検出手段により検出された2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うようにしても良い。 Further, in the program according to the present invention, the acceleration detecting unit detects acceleration due to an operation on the information processing terminal at two locations of the information processing terminal, and the handle determining unit is configured to detect the acceleration at the two locations detected by the acceleration detecting unit. The determination may be performed when the difference in acceleration due to movement is greater than a predetermined value.
また、本発明におけるプログラムは、前記加速度検出手段は、情報処理端末の3箇所以上の位置において情報処理端末に対する動作による加速度を検出し、前記持ち手判別手段は、前記加速度検出手段により検出された動作による加速度の大きさの順番に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 In the program according to the present invention, the acceleration detecting unit detects acceleration due to an operation on the information processing terminal at three or more positions of the information processing terminal, and the handle determining unit is detected by the acceleration detecting unit. Based on the order of the magnitude of acceleration due to movement, it may be determined whether the user holds the information processing terminal with the right hand or the left hand.
また、本発明におけるプログラムは、情報処理端末を、情報処理端末に掛かる重力加速度により情報処理端末の向きを検出する向き検出手段としても機能させ、前記加速度検出手段は、情報処理端末に掛かる重力加速度も検出し、前記持ち手判別手段は、前記加速度検出手段により検出された動作による加速度の大きさの順番と、前記向き検出手段により検出された情報処理端末の向きと、に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うようにしても良い。 The program according to the present invention also causes the information processing terminal to function as a direction detection unit that detects the direction of the information processing terminal based on the gravitational acceleration applied to the information processing terminal. The holding hand determining means detects the information based on the order of the magnitudes of the accelerations by the motion detected by the acceleration detecting means and the orientation of the information processing terminal detected by the orientation detecting means. It may be determined whether the processing terminal is held by the right hand or the left hand.
また、本発明におけるプログラムは、前記持ち手判別手段は、前記加速度検出手段により検出された動作による加速度のうちの2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うようにしても良い。 In the program according to the present invention, the handle determination unit performs the determination when a difference in acceleration due to an operation at two locations among accelerations due to an operation detected by the acceleration detection unit is larger than a predetermined value. You may do it.
100 情報処理端末
110 CPU
120 メモリ
130 フラッシュメモリ
140 タッチパネル
150 加速度センサ
210 加速度検出手段
220 持ち手判別手段
230 向き検出手段
240 差分算出手段
250 中心推定手段100
DESCRIPTION OF
Claims (24)
Translated fromJapanese前記加速度検出手段により検出された動作による加速度に基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別手段と、を有することを特徴とする情報処理端末。An acceleration detecting means for detecting an acceleration caused by an action on the own machine;
And a holding hand discriminating means for discriminating whether the user is holding his / her own hand with the right hand or the left hand based on the acceleration due to the operation detected by the acceleration detecting means. Processing terminal.
前記加速度検出手段により検出された動作による加速度の向きに基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項1に記載の情報処理端末。The handle determining means includes
2. The information according to claim 1, wherein a determination is made as to whether the user is holding his / her own device with a right hand or a left hand based on a direction of acceleration due to an operation detected by the acceleration detecting means. Processing terminal.
前記加速度検出手段は、
自機に掛かる重力加速度も検出し、
前記持ち手判別手段は、
前記加速度検出手段により検出された動作による加速度の向きと、前記向き検出手段により検出された自機の向きと、に基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項1または2に記載の情報処理端末。It further has a direction detecting means for detecting the direction of the aircraft by gravity acceleration applied to the aircraft,
The acceleration detecting means includes
Detect the gravitational acceleration applied to your machine,
The handle determining means includes
Based on the direction of acceleration detected by the acceleration detection means and the direction of the own machine detected by the direction detection means, the user holds his / her machine with his right hand or left hand The information processing terminal according to claim 1, wherein the information processing terminal is discriminated.
自機の2箇所において自機に対する動作による加速度を検出し、
前記持ち手判別手段は、
前記加速度検出手段により検出された2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うことを特徴とする請求項1から3のいずれか1項に記載の情報処理端末。The acceleration detecting means includes
Detect acceleration due to movement of your machine at two locations on your machine,
The handle determining means includes
The information processing terminal according to any one of claims 1 to 3, wherein the determination is performed when a difference in acceleration caused by an operation at two locations detected by the acceleration detecting unit is larger than a predetermined value. .
自機の3箇所以上の位置において自機に対する動作による加速度を検出し、
前記持ち手判別手段は、
前記加速度検出手段により検出された動作による加速度の大きさの順番に基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項1に記載の情報処理端末。The acceleration detecting means includes
Detect acceleration due to movement of your machine at three or more positions of your machine,
The handle determining means includes
2. The method according to claim 1, wherein a determination is made as to whether the user is holding his / her own device with a right hand or a left hand based on the order of magnitude of acceleration by the motion detected by the acceleration detecting means. The information processing terminal described.
前記加速度検出手段は、
自機に掛かる重力加速度も検出し、
前記持ち手判別手段は、
前記加速度検出手段により検出された動作による加速度の大きさの順番と、前記向き検出手段により検出された自機の向きと、に基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項5に記載の情報処理端末。It further has a direction detecting means for detecting the direction of the aircraft by gravity acceleration applied to the aircraft,
The acceleration detecting means includes
Detect the gravitational acceleration applied to your machine,
The handle determining means includes
Based on the order of the magnitude of acceleration due to the motion detected by the acceleration detecting means and the orientation of the own equipment detected by the orientation detecting means, the user holds the own equipment with either the right hand or the left hand. The information processing terminal according to claim 5, wherein the information processing terminal determines whether the information is present.
前記加速度検出手段により検出された動作による加速度のうちの2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うことを特徴とする請求項5または6に記載の情報処理端末。The handle determining means includes
7. The information processing according to claim 5, wherein the determination is performed when a difference between accelerations caused by movements at two locations out of accelerations caused by movements detected by the acceleration detection unit is larger than a predetermined value. Terminal.
前記検出手段により検出された方向に基づき、ユーザが自機を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別手段と、を有することを特徴とする情報処理端末。A detecting means for detecting a direction in which the user is shaken by the user when an operation of shaking the user by the user is performed;
An information processing terminal, comprising: a hand discriminating unit for discriminating whether the user is holding his / her own device with the right hand or the left hand based on the direction detected by the detecting unit.
前記加速度検出ステップにより検出された動作による加速度に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別ステップと、を有することを特徴とする持ち手判別方法。An acceleration detection step for detecting an acceleration due to an operation on the information processing terminal;
A holding hand determining step of determining whether the user holds the information processing terminal with the right hand or the left hand based on the acceleration due to the operation detected in the acceleration detecting step. How to distinguish a handle.
前記加速度検出ステップにより検出された動作による加速度の向きに基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項9に記載の持ち手判別方法。The handle determination step includes
The determination as to whether the user is holding the information processing terminal with a right hand or a left hand based on a direction of acceleration by the operation detected by the acceleration detection step. How to distinguish a handle.
前記加速度検出ステップは、
情報処理端末に掛かる重力加速度も検出し、
前記持ち手判別ステップは、
前記加速度検出ステップにより検出された動作による加速度の向きと、前記向き検出ステップにより検出された情報処理端末の向きと、に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項9または10に記載の持ち手判別方法。A direction detecting step of detecting a direction of the information processing terminal by gravity acceleration applied to the information processing terminal;
The acceleration detecting step includes
Detects gravitational acceleration on the information processing terminal,
The handle determination step includes
The user holds the information processing terminal with either the right hand or the left hand based on the direction of acceleration due to the operation detected in the acceleration detection step and the direction of the information processing terminal detected in the direction detection step. The method of determining a handle according to claim 9 or 10, wherein a determination is made as to whether or not there is any.
情報処理端末の2箇所において情報処理端末に対する動作による加速度を検出し、
前記持ち手判別ステップは、
前記加速度検出ステップにより検出された2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うことを特徴とする請求項9から11のいずれか1項に記載の持ち手判別方法。The acceleration detecting step includes
Acceleration due to movement of the information processing terminal is detected at two locations of the information processing terminal,
The handle determination step includes
The handle determination according to any one of claims 9 to 11, wherein the determination is performed when a difference in acceleration due to the motion at the two positions detected by the acceleration detection step is larger than a predetermined value. Method.
情報処理端末の3箇所以上の位置において情報処理端末に対する動作による加速度を検出し、
前記持ち手判別ステップは、
前記加速度検出ステップにより検出された動作による加速度の大きさの順番に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項9に記載の持ち手判別方法。The acceleration detecting step includes
Acceleration due to movement of the information processing terminal is detected at three or more positions of the information processing terminal,
The handle determination step includes
10. The determination as to whether the user is holding the information processing terminal with the right hand or the left hand based on the order of the magnitude of the acceleration detected by the acceleration detection step. The handle determination method described in 1.
前記加速度検出ステップは、
情報処理端末に掛かる重力加速度も検出し、
前記持ち手判別ステップは、
前記加速度検出ステップにより検出された動作による加速度の大きさの順番と、前記向き検出ステップにより検出された情報処理端末の向きと、に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項13に記載の持ち手判別方法。A direction detecting step of detecting a direction of the information processing terminal by gravity acceleration applied to the information processing terminal;
The acceleration detecting step includes
Detects gravitational acceleration on the information processing terminal,
The handle determination step includes
Based on the order of the magnitude of the acceleration by the motion detected in the acceleration detection step and the orientation of the information processing terminal detected in the orientation detection step, the user holds the information processing terminal with either the right hand or the left hand. The method of determining a handle according to claim 13, wherein the determination is made as to whether or not it is held.
前記加速度検出ステップにより検出された動作による加速度のうちの2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うことを特徴とする請求項13または14に記載の持ち手判別方法。The handle determination step includes
15. The handle according to claim 13 or 14, wherein the determination is performed when a difference in acceleration due to motion at two locations out of acceleration due to motion detected in the acceleration detection step is greater than a predetermined value. How to determine.
前記検出ステップにより検出された方向に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別ステップと、を有することを特徴とする持ち手判別方法。A detection step of detecting a direction in which the information processing terminal is shaken by the user when an operation of shaking by the user is performed on the information processing terminal;
A handle determination step comprising: a handle determination step of determining whether the user is holding the information processing terminal with a right hand or a left hand based on the direction detected by the detection step Method.
情報処理端末に対する動作による加速度を検出する加速度検出手段と、
前記加速度検出手段により検出された動作による加速度に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別手段として機能させるプログラム。Information processing terminal
Acceleration detecting means for detecting acceleration due to an operation on the information processing terminal;
A program that functions as a holding hand discriminating means for discriminating whether the user is holding the information processing terminal with the right hand or the left hand based on the acceleration due to the operation detected by the acceleration detecting means.
前記加速度検出手段により検出された動作による加速度の向きに基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項17に記載のプログラム。The handle determining means includes
18. The method according to claim 17, wherein it is determined whether the user is holding the information processing terminal with a right hand or a left hand, based on a direction of acceleration due to the motion detected by the acceleration detecting means. program.
情報処理端末に掛かる重力加速度により情報処理端末の向きを検出する向き検出手段としても機能させ、
前記加速度検出手段は、
情報処理端末に掛かる重力加速度も検出し、
前記持ち手判別手段は、
前記加速度検出手段により検出された動作による加速度の向きと、前記向き検出手段により検出された情報処理端末の向きと、に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項17または18に記載のプログラム。Information processing terminal
It also functions as a direction detection means for detecting the direction of the information processing terminal by the gravitational acceleration applied to the information processing terminal,
The acceleration detecting means includes
Detects gravitational acceleration on the information processing terminal,
The handle determining means includes
The user holds the information processing terminal with either the right hand or the left hand based on the direction of the acceleration by the operation detected by the acceleration detection unit and the direction of the information processing terminal detected by the direction detection unit. 19. The program according to claim 17 or 18, wherein a determination is made as to whether or not it exists.
情報処理端末の2箇所において情報処理端末に対する動作による加速度を検出し、
前記持ち手判別手段は、
前記加速度検出手段により検出された2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うことを特徴とする請求項17から19のいずれか1項に記載のプログラム。The acceleration detecting means includes
Acceleration due to movement of the information processing terminal is detected at two locations of the information processing terminal
The handle determining means includes
The program according to any one of claims 17 to 19, wherein the determination is performed when a difference in acceleration due to an operation at two locations detected by the acceleration detecting means is larger than a predetermined value.
情報処理端末の3箇所以上の位置において情報処理端末に対する動作による加速度を検出し、
前記持ち手判別手段は、
前記加速度検出手段により検出された動作による加速度の大きさの順番に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項17に記載のプログラム。The acceleration detecting means includes
Acceleration due to movement of the information processing terminal is detected at three or more positions of the information processing terminal,
The handle determining means includes
18. The determination as to whether the user is holding the information processing terminal with the right hand or the left hand based on the order of the magnitude of acceleration by the motion detected by the acceleration detecting means. The program described in.
情報処理端末に掛かる重力加速度により情報処理端末の向きを検出する向き検出手段としても機能させ、
前記加速度検出手段は、
情報処理端末に掛かる重力加速度も検出し、
前記持ち手判別手段は、
前記加速度検出手段により検出された動作による加速度の大きさの順番と、前記向き検出手段により検出された情報処理端末の向きと、に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行うことを特徴とする請求項21に記載のプログラム。Information processing terminal
It also functions as a direction detection means for detecting the direction of the information processing terminal by the gravitational acceleration applied to the information processing terminal,
The acceleration detecting means includes
Detects gravitational acceleration on the information processing terminal,
The handle determining means includes
Based on the order of the magnitude of the acceleration by the motion detected by the acceleration detecting means and the direction of the information processing terminal detected by the orientation detecting means, the user holds the information processing terminal with either the right hand or the left hand. The program according to claim 21, wherein it is determined whether or not it is possessed.
前記加速度検出手段により検出された動作による加速度のうちの2箇所における動作による加速度の差分が所定の値より大きいときに、前記判別を行うことを特徴とする請求項21または22に記載のプログラム。The handle determining means includes
23. The program according to claim 21, wherein the determination is performed when a difference between accelerations due to motions at two locations out of accelerations due to motions detected by the acceleration detection means is larger than a predetermined value.
情報処理端末に対してユーザにより振る動作が行われたときに、前記ユーザにより情報処理端末が振られた方向を検出する検出手段と、
前記検出手段により検出された方向に基づき、ユーザが情報処理端末を右手と左手とのどちらの手で持っているのかの判別を行う持ち手判別手段として機能させるプログラム。Information processing terminal
Detecting means for detecting a direction in which the information processing terminal is shaken by the user when an operation of shaking by the user is performed on the information processing terminal;
A program that functions as a holding hand discriminating unit that discriminates whether the user is holding the information processing terminal with the right hand or the left hand based on the direction detected by the detecting unit.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010134493AJP5605001B2 (en) | 2010-06-11 | 2010-06-11 | Information processing terminal, handle discrimination method and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010134493AJP5605001B2 (en) | 2010-06-11 | 2010-06-11 | Information processing terminal, handle discrimination method and program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011258146Atrue JP2011258146A (en) | 2011-12-22 |
| JP5605001B2 JP5605001B2 (en) | 2014-10-15 |
Family
ID=45474221
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010134493AExpired - Fee RelatedJP5605001B2 (en) | 2010-06-11 | 2010-06-11 | Information processing terminal, handle discrimination method and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5605001B2 (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103576850A (en)* | 2012-12-26 | 2014-02-12 | 深圳市创荣发电子有限公司 | Method and system for judging holding mode of handheld device |
| CN103581424A (en)* | 2012-08-09 | 2014-02-12 | 中国移动通信集团公司 | Method and corresponding mobile terminal for identifying user operation for mobile terminal |
| CN104252300A (en)* | 2013-06-25 | 2014-12-31 | 深圳富泰宏精密工业有限公司 | System and method for indenting user operation interface |
| JP2015210561A (en)* | 2014-04-24 | 2015-11-24 | 富士通株式会社 | Portable terminal device, input control method, and input control program |
| CN105824597A (en)* | 2015-06-30 | 2016-08-03 | 维沃移动通信有限公司 | Terminal audio processing method and terminal |
| CN105892751A (en)* | 2016-04-21 | 2016-08-24 | 北京小米移动软件有限公司 | Method and device for controlling triggering of touch control screen and electronic equipment |
| JP2016181234A (en)* | 2015-03-25 | 2016-10-13 | 沖電気工業株式会社 | Information processing apparatus, program, portable terminal, and information processing system |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106487981A (en)* | 2015-08-31 | 2017-03-08 | 展讯通信(上海)有限公司 | Up volume gain compensation system and method in hand-held communication process |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004214923A (en)* | 2002-12-27 | 2004-07-29 | Hitachi Ltd | Mobile communication terminal and mobile communication system |
| JP2007098555A (en)* | 2005-10-07 | 2007-04-19 | Nippon Telegr & Teleph Corp <Ntt> | Position indicating method, pointing device and program for realizing the method |
| JP2009276094A (en)* | 2008-05-12 | 2009-11-26 | Sumitomo Electric Ind Ltd | Attitude determination apparatus and method, movement direction determination apparatus, position determination apparatus, and computer program |
| JP2011188345A (en)* | 2010-03-10 | 2011-09-22 | Olympus Corp | Portable electronic device |
- 2010
- 2010-06-11JPJP2010134493Apatent/JP5605001B2/ennot_activeExpired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004214923A (en)* | 2002-12-27 | 2004-07-29 | Hitachi Ltd | Mobile communication terminal and mobile communication system |
| JP2007098555A (en)* | 2005-10-07 | 2007-04-19 | Nippon Telegr & Teleph Corp <Ntt> | Position indicating method, pointing device and program for realizing the method |
| JP2009276094A (en)* | 2008-05-12 | 2009-11-26 | Sumitomo Electric Ind Ltd | Attitude determination apparatus and method, movement direction determination apparatus, position determination apparatus, and computer program |
| JP2011188345A (en)* | 2010-03-10 | 2011-09-22 | Olympus Corp | Portable electronic device |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103581424A (en)* | 2012-08-09 | 2014-02-12 | 中国移动通信集团公司 | Method and corresponding mobile terminal for identifying user operation for mobile terminal |
| CN103576850A (en)* | 2012-12-26 | 2014-02-12 | 深圳市创荣发电子有限公司 | Method and system for judging holding mode of handheld device |
| CN104252300A (en)* | 2013-06-25 | 2014-12-31 | 深圳富泰宏精密工业有限公司 | System and method for indenting user operation interface |
| JP2015210561A (en)* | 2014-04-24 | 2015-11-24 | 富士通株式会社 | Portable terminal device, input control method, and input control program |
| JP2016181234A (en)* | 2015-03-25 | 2016-10-13 | 沖電気工業株式会社 | Information processing apparatus, program, portable terminal, and information processing system |
| CN105824597A (en)* | 2015-06-30 | 2016-08-03 | 维沃移动通信有限公司 | Terminal audio processing method and terminal |
| CN105892751A (en)* | 2016-04-21 | 2016-08-24 | 北京小米移动软件有限公司 | Method and device for controlling triggering of touch control screen and electronic equipment |
| CN105892751B (en)* | 2016-04-21 | 2019-05-07 | 北京小米移动软件有限公司 | Method, device and electronic device for controlling touch screen triggering |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5605001B2 (en) | 2014-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5605001B2 (en) | Information processing terminal, handle discrimination method and program | |
| EP2740015B1 (en) | Sensor-based user interface control | |
| US10534431B2 (en) | Tracking finger movements to generate inputs for computer systems | |
| KR101477442B1 (en) | Methods and apparatuses for gesture-based user input detection in a mobile device | |
| KR101608878B1 (en) | Rest detection using accelerometer | |
| JP5675627B2 (en) | Mobile device with gesture recognition | |
| JPWO2009072583A1 (en) | Input device, control device, control system, control method, and handheld device | |
| US10191603B2 (en) | Information processing device and information processing method | |
| JP2006300790A (en) | Fall detector | |
| JP2016539413A (en) | Floating or air handling method and apparatus | |
| WO2009008568A1 (en) | Method for implementing mouse algorithm using tactile sensor | |
| US20140092040A1 (en) | Electronic apparatus and display control method | |
| JP5964495B2 (en) | Direction sensing computing device | |
| JP4599502B1 (en) | Magnetic gyro | |
| JP2010091462A (en) | Relative acceleration detector, method for detecting relative acceleration, and program | |
| EP3076268A1 (en) | An operating system, wearable device, and operation method | |
| JPWO2012066850A1 (en) | Electronics | |
| CN109992327A (en) | A robot control method, robot and storage medium | |
| CN104714730A (en) | Information processing method and electronic device | |
| JP2019096182A (en) | Electronic device, display method, and program | |
| CN103513880B (en) | The method and device that control targe object rotates in electronic equipment, electronic equipment | |
| CN105068740A (en) | A page switching method and smart watch | |
| JPWO2014141843A1 (en) | Display control apparatus, information device, display control method, and program | |
| JP6067838B2 (en) | Method and apparatus for providing 3D input | |
| CN103838944A (en) | System and method for simulating boomerang game |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney | Free format text:JAPANESE INTERMEDIATE CODE: A7421 Effective date:20110920 | |
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20130515 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20131210 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20140107 | |
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20140305 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20140729 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20140811 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:5605001 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 | |
| LAPS | Cancellation because of no payment of annual fees |