JP2011199317A - Stage equipment and exposure device, and method of manufacturing device - Google Patents
Stage equipment and exposure device, and method of manufacturing deviceDownload PDFInfo
- Publication number
- JP2011199317A JP2011199317AJP2011142126AJP2011142126AJP2011199317AJP 2011199317 AJP2011199317 AJP 2011199317AJP 2011142126 AJP2011142126 AJP 2011142126AJP 2011142126 AJP2011142126 AJP 2011142126AJP 2011199317 AJP2011199317 AJP 2011199317A
- Authority
- JP
- Japan
- Prior art keywords
- stage
- axis
- drive
- along
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



























Landscapes
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
Translated fromJapaneseDescription
Translated fromJapanese本出願は、2005年1月31日に出願され係属中である米国特許出願第11/048,405号(軽量精密ステージと低伝播性とを有するステージ装置)の一部係属出願である。また、本出願は、2004年11月2日に出願された米国仮出願第60/624,385号(精密ステージ構造)、2004年11月4日に出願された米国仮出願第60/625,699号(Zアクチュエータ)、及び、2005年1月28日に出願された米国仮出願第60/647,901号(精密ステージZアクチュエータ装置及び方法)、に基づく優先権を主張する。許容される範囲内において、上記の米国特許出願第11/048,405号、及び米国仮出願第60/624,385号、60/625,699号、及び、60/647,901号を本出願に援用する。 This application is a partially pending application of US patent application Ser. No. 11 / 048,405 (stage apparatus having a lightweight precision stage and low propagation properties) filed on Jan. 31, 2005 and pending. This application is also related to US Provisional Application No. 60 / 624,385 (Precision Stage Structure) filed on November 2, 2004, US Provisional Application No. 60/625, filed on November 4, 2004. 699 (Z Actuator) and US Provisional Application No. 60 / 647,901 (Precision Stage Z Actuator Device and Method) filed Jan. 28, 2005. To the extent permitted, US patent application Ser. No. 11 / 048,405 and US Provisional Applications Nos. 60 / 624,385, 60 / 625,699, and 60 / 647,901 are hereby filed. Incorporated into.
半導体製造用の露光装置は、一般に、半導体製造工程において、レチクルの像を半導体ウエハに転写するのに使用される。通常、露光装置は、照明源、レチクルを位置決めするレチクルステージ装置、光学機器、半導体ウエハを位置決めするウエハステージ装置、測定システム、及び制御システムを有する。 An exposure apparatus for manufacturing a semiconductor is generally used to transfer an image of a reticle to a semiconductor wafer in a semiconductor manufacturing process. In general, an exposure apparatus includes an illumination source, a reticle stage apparatus that positions a reticle, an optical apparatus, a wafer stage apparatus that positions a semiconductor wafer, a measurement system, and a control system.
一般的なステージ装置は、粗動ステージ、粗動ステージを駆動する粗動装置、精密ステージ、精密ステージを駆動する精密駆動装置を有する。この構成において、測定システムは、精密ステージの位置を常にモニターする。 A general stage apparatus has a coarse movement stage, a coarse movement apparatus that drives the coarse movement stage, a precision stage, and a precision drive apparatus that drives the precision stage. In this configuration, the measurement system constantly monitors the position of the precision stage.
ステージ構造において、地表あるいは周辺からの振動及び外乱が粗動ステージに伝わり、その後、精密ステージに伝わることがある。これは、精密ステージの位置決めエラーを引き起こす可能性がある。レチクルからウエハに転写される像の大きさや像形状は、微小である。こうしたことから、ウエハ及びレチクルの精密な位置決めは、高密度の半導体ウエハの製造にとって極めて重要である。 In the stage structure, vibrations and disturbances from the ground surface or the periphery may be transmitted to the coarse motion stage and then to the precision stage. This can cause precision stage positioning errors. The size and shape of the image transferred from the reticle to the wafer are very small. For this reason, precise positioning of the wafer and reticle is critical for the production of high density semiconductor wafers.
本発明は、互いに交差する第1軸、第2軸及び第3軸に沿って物体を移動させるステージ装置に関する。ステージ装置は、第1部材と、前記第1軸に沿って前記第1部材を移動させる第1移動装置と、前記物体を保持する第2部材と、前記第1軸、前記第2軸及び前記第3軸に沿って、前記第1部材に対して前記第2部材を移動させる第2移動装置と、前記第1部材に設けられて、前記第2部材を、該第2部材が前記第1部材に対して前記第1軸及び前記第2軸に沿った方向に移動可能に支持するベアリング部材と、を有する。前記第2移動装置は、コイル部材と該コイル部材と協働して前記第2部材を前記第1部材に対して前記第3軸に沿って移動させる駆動力を発生させる磁性部材とを有し、前記コイル部材と前記磁性部材とが前記第1部材に設けられている。 The present invention relates to a stage apparatus that moves an object along a first axis, a second axis, and a third axis that intersect each other. The stage device includes a first member, a first moving device that moves the first member along the first axis, a second member that holds the object, the first axis, the second axis, and the A second moving device configured to move the second member relative to the first member along a third axis; and the second member provided on the first member, wherein the second member is the first member. And a bearing member that supports the member so as to be movable in a direction along the first axis and the second axis. The second moving device includes a coil member and a magnetic member that cooperates with the coil member to generate a driving force for moving the second member along the third axis with respect to the first member. The coil member and the magnetic member are provided on the first member.
また、本発明に係る露光装置は、先に記載のステージ装置を有するものである。 An exposure apparatus according to the present invention includes the stage apparatus described above.
また、本発明に係るデバイス製造方法は、基板を用意する工程と、先に記載の露光装置を用いて前記基板上に像を形成する工程とを有するものである。 The device manufacturing method according to the present invention includes a step of preparing a substrate and a step of forming an image on the substrate using the exposure apparatus described above.
本発明の特徴は、発明内容はもちろん、その構成及び動作のいずれも、同種の特徴が同種の部分として言及された、添付の図面及び以下の説明から最良に理解される。The features of the present invention, as well as the content of the invention, as well as its construction and operation, are best understood from the accompanying drawings and the following description, in which like features are referred to as like parts.
図1は精密機器、すなわち本発明の特徴を有する露光装置10の概略図である。露光装置10は、装置フレーム12、照明系(照射装置)14、光学機器16、レチクルステージ装置18、ウエハステージ装置20、測定システム22、及び制御システム24を備える。露光装置10の構成のデザインは、露光装置10の設計要求に応じて様々に変更可能である。 FIG. 1 is a schematic view of a precision instrument, that is, an
複数の図において、X軸、X軸に直交するY軸、及び、X軸及びY軸に直交するZ軸が設定された座標系を採用している。なお、これらの軸は、第1、第2、及び第3軸としても参照される。 In a plurality of drawings, a coordinate system in which an X axis, a Y axis orthogonal to the X axis, and a Z axis orthogonal to the X axis and the Y axis are set is employed. These axes are also referred to as the first, second, and third axes.
露光装置10は、集積回路のパターン(不図示)を、レチクル26から半導体ウエハ200(図2B参照)上に転写するリソグラフィ装置として特に好ましく用いられる。露光装置10は、地面、土台、床、あるいは他の支持構造物などの、搭載ベース30に搭載されている。 The
リソグラフィ装置としては、様々なタイプがある。例えば、露光装置10は、レチクル26とウエハ200とを同期移動させながら、レチクル26からウエハ200にパターン露光する、スキャニング型のフォトリソグラフィシステムとして用いられる。スキャニング型のリソグラフィ装置においては、レチクルステージ装置18によって光学機器16の光軸に対して垂直にレチクル26が移動され、また、ウエハステージ装置20によって光学機器16の光軸に対して垂直にウエハ200が移動される。レチクル26とウエハ200との同期移動の間に、レチクル26とウエハ200の走査が行われる。 There are various types of lithographic apparatus. For example, the
また、露光装置10は、レチクル26とウエハ200とが静止した状態で、レチクル26を露光する、ステップ・アンド・リピート型のフォトグラフィシステムとして用いることもできる。ステップ・アンド・リピートの工程では、1つのフィールドの露光中において、レチクル26及び光学機器16に対して一定位置にウエハ200がある。その後、連続した複数の露光ステップの間に、光学機器16の光軸に対して垂直に、ウエハステージ装置20とともに一定速度でウエハが動かされ、ウエハ200における次のフィールドが光学機器16及びレチクル26に対する露光位置に配置される。このプロセスの後、レチクル26上の像がウエハ200の前記フィールドに順次的に露光され、その後、ウエハ200の次のフィールドが光学機器16及びレチクル26に対して位置決めされる。 The
なお、ここで提供される露光装置10の用途は、半導体製造用のフォトリソグラフィシステムに限定されない。例えば、露光装置10は、液晶ディスプレイデバイスのパターンを矩形のガラスプレートに露光するLCDフォトリソグラフィシステム、あるいは、薄膜磁気ヘッド製造用のフォトリソグラフィシステムとしても使用可能である。さらに、本発明は、レンズ機器を介することなく、マスクを基板に近づけてマスクパターンをマスクから基板に露光するプロキシミティ方式のフォトリソグラフィシステムにも適用可能である。 The application of the
装置フレーム12は、剛体であり、露光装置10の構成部品を支持する。図1に示す装置フレーム12は、搭載ベース30上で、レチクルステージ装置18、光学機器16、及び照明系14を支持する。 The
照明系14は、光源32、及び照明光学機器34含む。光源32は、光エネルギーのビーム(光束)を発する。照明光学機器34は、光エネルギーのビームを、光源32から光学機器16に導く。ビームは、レチクル26の異なる複数の部分を選択的に照射し、ウエハ200を露光する。図1では、光源32がレチクルステージ装置18の上方に支持されているように描かれている。しかしながら、通常は、装置フレーム12の側部の1つに光源32が固定され、光源32からのエネルギービームが照明光学機器34によって上方のレチクルステージ装置18に導かれる。 The
光源32は、g線源(436nm)、i線源(365nm)、KrFエキシマレーザ(248nm)、ArFエキシマレーザ(193nm)、あるいは、F2レーザ(157nm)でもよい。あるいは、光源32は、X線や電子線などの荷電粒子ビームを発してもよい。例えば、電子線を用いる場合には、電子銃の陰極(カソード)として、熱電子放射型のランタンヘキサボライト(LaB6)、あるいは、タンタル(Ta)を用いることができる。また、電子線を用いる場合には、マスクを用いる構成、マスクを用いずに直接ウエハ上にパターンを形成する構成、のいずれでもよい。 The
光学機器16は、レチクル26を通過してウエハ200に向かう光を、投影及び/又は集束させる。露光装置10の設計に応じて、光学機器16は、レチクル26上の照明された像を、拡大または縮小することができる。光学機器16は、縮小システムに限定される必要はない。1倍あるいは拡大システムに対しても同様である。 The
エキシマレーザのような遠紫外線を使用する場合には、遠紫外線を透過する石英や蛍石などのガラス材を光学機器16に用いることができる。F2タイプのレーザやX線を使用する場合には、光学機器16として反射屈折系または屈折系の光学系(レチクルも反射タイプであるのが望ましい)を採用することができ、また、電子線を使用する場合には、光学機器16として、電子レンズ及び偏向器からなる電子光学系を採用することができる。電子線が通過する光路は真空である必要がある。 When far ultraviolet rays such as excimer laser are used, a glass material such as quartz or fluorite that transmits far ultraviolet rays can be used for the
波長が200nmまたはそれ以下の真空紫外光(VUV)を使用する露光装置においても、反射屈折系を採用することができる。光学システムの反射屈折型の例は、日本国特開平8−171054号公報及びそれに対応する米国特許第5,668,672号明細書や、日本国特開平10−20195号公報及びそれに対応する米国特許第5,835,275号明細書に開示されている。ここで、反射光学素子としては、ビームスプリッタと凹面鏡とを有する反射屈折系を採用することができる。日本国特開平8−334695号及びそれに対応する米国特許第5,689,377号明細書、日本国特開平10−3039号公報及びこれに対応する米国特許第873,605号明細書(出願日:1997年6月12日)においても、ビームスプリッタを用いずに凹面鏡を有する光学系からなる反射屈折型を採用しており、本発明に適用可能である。許容される範囲内で、上記の米国特許及び日本国特許出願公開公報の開示を援用して本文の記載の一部とする。 A catadioptric system can also be employed in an exposure apparatus that uses vacuum ultraviolet light (VUV) having a wavelength of 200 nm or less. Examples of the catadioptric type optical system include Japanese Patent Laid-Open No. 8-171054 and the corresponding US Pat. No. 5,668,672, Japanese Patent Laid-Open No. 10-20195 and the corresponding US. This is disclosed in Japanese Patent No. 5,835,275. Here, as the reflective optical element, a catadioptric system having a beam splitter and a concave mirror can be employed. Japanese Patent Laid-Open No. 8-334695 and the corresponding US Pat. No. 5,689,377, Japanese Patent Laid-Open No. 10-3039 and the corresponding US Pat. No. 873,605 (the filing date) : June 12, 1997), a catadioptric type composed of an optical system having a concave mirror is used without using a beam splitter, and is applicable to the present invention. To the extent permitted, the disclosures of the above US patents and Japanese patent application publications are incorporated herein by reference.
レチクルステージ装置18は、レチクル26を保持しかつ光学機器16及びウエハ200に対してレチクル26を位置決めする。ほぼ同様に、ウエハステージ装置20は、ウエハ200を保持しかつレチクル26における照明部分の投影像に対してウエハ200を位置決めする。 The
さらに、フォトリソグラフィシステムにおいて、ウエハステージやマスクステージにリニアモータ(USP5,623,853またはUSP5,528,118参照)を用いる場合は、リニアモータとして、エアベアリングを用いたエア浮上型、又はローレンツ力又はリアクタンス力を用いた磁気浮上型のいずれを用いてもよい。許容される範囲内で、上記の米国特許第5,623,853号及び第5,528,118号の開示を援用して本文の記載の一部とする。 In addition, when a linear motor (see USP5,623,853 or USP5,528,118) is used for the wafer stage or mask stage in a photolithography system, the air levitation type using an air bearing or Lorentz force or reactance force is used as the linear motor. Any of the magnetic levitation types used may be used. To the extent permitted, the disclosures of US Pat. Nos. 5,623,853 and 5,528,118 are incorporated herein by reference.
また、二次元に磁石を配置した磁石ユニットと、二次元にコイルを配置した電機子ユニットとが対向した平面モータによって、ステージの1つを駆動することができる。この種の駆動システムでは、磁石ユニットと電機子ユニットとのいずれか一方がステージに接続され、他方のユニットがステージの移動面上に搭載される。 In addition, one of the stages can be driven by a planar motor in which a magnet unit in which magnets are arranged two-dimensionally and an armature unit in which coils are arranged two-dimensionally face each other. In this type of drive system, either the magnet unit or the armature unit is connected to the stage, and the other unit is mounted on the moving surface of the stage.
上記のようなステージの動きは、フォトグラフィシステムの性能に影響を及ぼす反力を発生させる可能性がある。ウエハ(基板)ステージの移動により発生する反力は、米国特許第5,528,110号及び日本国特開平8−136475号公報に記載されているような、フレーム部材を用いて機械的に床(大地)に逃がすことが可能である。また、レチクル(マスク)ステージの移動により発生する反力は、米国特許第5,874,820号及び日本国特開平8−330224号公報に記載されているような、フレーム部材を用いて機械的に大地に逃がすことが可能である。許容される範囲内において、上記の米国特許第5,528,110号、第5,874,820号、及び日本国特開平8−330224号公報の開示を援用して本文の記載の一部とする。 The movement of the stage as described above may generate a reaction force that affects the performance of the photography system. The reaction force generated by the movement of the wafer (substrate) stage is mechanically generated by using a frame member as described in US Pat. No. 5,528,110 and Japanese Patent Laid-Open No. 8-136475. It is possible to escape to (earth). The reaction force generated by the movement of the reticle (mask) stage is mechanically determined by using a frame member as described in US Pat. No. 5,874,820 and Japanese Patent Laid-Open No. 8-330224. It is possible to escape to the earth. Within the allowable range, the disclosures of the above-mentioned US Pat. Nos. 5,528,110, 5,874,820, and Japanese Patent Application Laid-Open No. 8-330224 are incorporated, To do.
測定システム22は、光学機器16あるいは他の基準に対するレチクル26及びウエハ200の移動をモニターする。この情報によって、制御システム24は、レチクルステージ装置18を制御してレチクル26を精確に位置決めすることができ、また、及びウエハステージ装置20を制御してウエハ200を精確に位置決めすることができる。例えば、測定システム22は、複数のレーザ干渉計、エンコーダ、及び/又は他の測定装置を利用することができる。
制御システム24は、レチクルステージ装置18、ウエハステージ装置20、及び測定システム22に接続されている。制御システム24は、測定システム22から情報を受け取り、ステージ移動装置18,20を制御してレチクル26及びウエハ200を精確に位置決めする。制御システム24は、少なくとも1つのプロセッサ及び回路を含む構成にできる。 The
ここに記載される実施形態に係るフォトリソグラフィシステム(露光装置)は、添付の特許請求の範囲に挙げられた各構成要素を含む各種サブシステムを、所定の機械的精度、電気的精度、光学的精度を保つように、組み立てることで製造することができる。これら各種精度を確保するために、この組み立ての前後には、すべての光学系について、光学的精度を達成するための調整が行われる。同様に、すべての機械系及び電気系について、機械的精度及び電気的精度を達成するための調整が行われる。各種サブシステムからフォトリソグラフィシステムへの組み立て工程は、各サブシステム相互の、機械的接続、電気回路の配線接続、及び気圧回路の配管接続等を含む。この各種サブシステムからフォトリソグラフィシステムへの組み立て工程の前に、各サブシステム個々の組み立て工程があることはいうまでもない。各種サブシステムを用いてフォトリソグラフィシステムが組み立てられると、フォトリソグラフィシステム全体としての各種精度を確保するための、総合調整が行われる。なお、露光システムの製造は温度及びクリーン度等が管理されたクリーンルーム内で行うことが望ましい。 A photolithography system (exposure apparatus) according to an embodiment described herein includes various sub-systems including the constituent elements recited in the appended claims with predetermined mechanical accuracy, electrical accuracy, and optical performance. It can be manufactured by assembling so as to maintain accuracy. In order to ensure these various accuracies, adjustments to achieve optical accuracy are performed for all optical systems before and after the assembly. Similarly, adjustments are made for all mechanical and electrical systems to achieve mechanical and electrical accuracy. The assembly process from various subsystems to the photolithographic system includes mechanical connection, electrical circuit wiring connection, and pneumatic circuit piping connection between the subsystems. It goes without saying that there is an assembly process for each subsystem before the assembly process from the various subsystems to the photolithography system. When a photolithography system is assembled using various subsystems, comprehensive adjustment is performed to ensure various accuracies as the entire photolithography system. It is desirable that the exposure system be manufactured in a clean room where the temperature, cleanliness, etc. are controlled.
図2Aは、制御システム224の模式図であり、ワークピース200(図2B参照)の位置決めに用いるステージ装置220の一実施形態の側面図である。例えば、ステージ装置220は、図1の露光装置10におけるウエハステージ装置20として使用することができる。本実施形態において、ステージ装置220は、半導体ウエハ200の製造中に、ウエハ200(図2B参照)を位置決めするものとする。なお、ステージ装置220は、製造及び/又は検査中の他のワークピース200の移動や、電子顕微鏡におけるデバイスの移動(不図示)、あるいは、精密な測定作業中のデバイスの移動(不図示)にも使用することができる。例えば、ステージ装置220は、レチクルステージ装置18として機能するように設計されてもよい。 FIG. 2A is a schematic diagram of the
本実施形態において、ステージ装置220は、ステージベース236と、第1ステージ238と、第2ステージ240と、第1移動装置242と、第2移動装置244とを有する。これらの要素のサイズ、形状、及びデザインはそれぞれ、様々に変更可能である。制御システム224は、ワークピース200を精確に位置決めするために、移動装置242,244を精密に制御する。 In the present embodiment, the
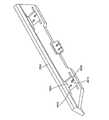
図2Aにおいて、ステージベース236は、ステージ装置220のいくつかの構成要素を支持し、X軸に沿って、Y軸に沿って、及びZ軸周りに、第1ステージ238の移動を案内する。本実施形態において、ステージベース236は、概ね矩形形状である。 In FIG. 2A, the
第1ステージ238は、第2ステージ240の比較的大きな移動を促す、いわゆる粗動ステージである。一実施形態において、第1ステージ238は、第2ステージ240及び第2移動装置244を支持する。一実施形態において、第1ステージ238は、下方支持体251A、下方支持体251Aに固定された上方支持体251B、及び下方支持体251Aを支持するステージフレーム251Cを有する。図2Aにおいては、ステージベース236の上方でベアリング(不図示)が第1ステージ238を支持しかつ、ステージベース236に対して相対的に、X軸に沿って、Y軸に沿って、及びZ軸周りに、第1ステージ238が移動するのを許容する。ベアリングとして、例えば、真空予圧型の流体ベアリング、磁気型のベアリング、あるいはローラ型の機器が適用可能である。 The
第2ステージ240は、ワークピース200を保持する、いわゆる精密ステージである。第2ステージ240については、後で詳述する。 The
第1移動装置242は、ステージベース236と相対的に、第1ステージ238と、第2移動装置244の一部とを移動させる。図2Aに示す実施形態では、第1移動装置242は、3つの移動軸に対して、すなわち、X軸に沿って、Y軸に沿って、及びZ軸周りに、第1ステージ238を移動させる。また、例えば、第1移動装置242は、3未満の移動軸に対して、あるいは3を超える移動軸に対して、第1ステージ238を移動させる構成とすることもできる。第1移動装置242は、1以上の駆動機を有してもよい。 The first moving
図2Aにおいて、第1移動装置242は、左X粗動機246Lと、右X粗動機246Rと、Y粗動機246Y(想像線で示される)と、ガイドバー248とを有する。 In FIG. 2A, the first moving
X粗動機246L,246Rは、ガイドバー248を移動させて、X軸に沿って、Z軸周りに限定された範囲内で、ガイドバー248及び第1ステージ238を移動させ、また、Y粗動機246Yは、Y軸に沿って、ガイドバー248に対して相対的に、第1ステージ238を移動させる。Z軸周りの動きは、左X粗動機246A及び右X粗動機246Rによって発生する力の量の差を制御することによって達成される。 The X coarse
各粗動機246L,246R,246Yのデザインは、第1移動装置242の動作要求に適するように様々に変更可能である。図2Aに示す本実施形態では、各粗動機246L,246R,246Yは、第1粗動用部品250Aと、第1粗動用部品250Aと相互に作用する第2粗動用部品250Bとを有する。本実施形態において、各粗動機246L,246R,246Yは、リニアモータであり、粗動用部品250A,250Bのうちの1つが1以上の磁石を含む磁石アレイを有し、粗動用部品250B,250Aのうちの1つが1以上のコイルを含む導体アレイを有する。図2Aにおいて、各X粗動機246L,246Rの第1粗動用部品250Aが、ステージベース236に固定され、各X粗動機246L,246Rの第2粗動用部品250Bが、ガイドバー248に固定される。また、Y粗動機246Yの第1粗動用部品250Aが、ガイドバー248に固定され、Y粗動機246Yの第2粗動用部品250Bが、第1ステージ238に固定される。 The design of each of the
なお、粗動機246L,246R,246Yのうちの1以上のものが、ロータリモータ、ボイスコイルモータ、電磁駆動機、平面モータ、あるいは他の力を用いた駆動機のような、別タイプのモータであってもよい。 One or more of the
ガイドバー248は、Y軸に沿って、第1ステージ238の移動を案内する。ガイドバー248と第1ステージ238との間に、流体ベアリングのようなベアリング(不図示)又は磁気タイプのベアリングが配置されてもよい。別のベアリング(不図示)が、Z軸に沿ってステージベース236に対して離間したガイドバー248を支持するとともに、X軸に沿って、及びZ軸周りに、ステージベース236に対するガイドバー248の移動を可能にする。こうしたベアリングとしては、例えば、真空予圧型の流体ベアリング、磁気型のベアリング、あるいはローラ型の機器が適用可能である。 The
第2移動装置244は、第2ステージ240及びワークピース200を移動させかつ位置決めする。図2Aにおいて、第2移動装置244は、6つの移動軸に対して、すなわち、X,Y,及びZ軸に沿って、また、X,Y,及びZ軸周りに、第1ステージ238に対して相対的に第2ステージ240を移動させる。また、例えば、第2移動装置244は、6未満の移動軸に対して、第2ステージ240を移動させる構成とすることもできる。第2移動装置244は、1以上の駆動機を有してもよい。 The second moving
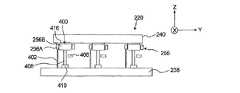
図2Bは、図2Aのステージ装置220の部分的な斜視図である。より具体的には、図2Bは、第2ステージ240と、第2移動装置244と、第1ステージ238の一部、すなわち下方支持体251A及び上方支持体251Bとを示す。 FIG. 2B is a partial perspective view of the
図2Bはさらに、第2移動装置244の一実施形態の詳細を示す。具体的には、この実施形態では、第2移動装置244は、第1X駆動機252Fと、第2X駆動機252Sと、第1Y駆動機254Fと、第2Y駆動機254S(図3Aに示す)と、離間した3つのZ駆動機255(図2Bでは2つのみが示されている。)とを有する。X駆動機252F,252Sは、X軸に沿って第2ステージ240を移動させ、Y駆動機254F,254Sは、Y軸に沿って第2ステージ240を移動させ、Z駆動機255は、Z軸に沿って、またX及びY軸周りに、第2ステージ240を移動させる。X駆動機252F,252SとY駆動機254F,254Sとのいずれかは、Z軸周りの第2ステージ240の移動に用いることができる。 FIG. 2B further illustrates details of one embodiment of the second
各駆動機252F,252S,254F,254S,255のデザインは、第2移動装置244の動作要求に適するように様々に変更可能である。図2Bに示す本実施形態において、各駆動機252F,252S,254F,254Sは、第1駆動用部品256Aと、この第1駆動用部品256Aと相互に作用する第2駆動用部品256Bとを有する。図2Bにおいて、X及びY駆動機252F,252S,254F,254Sのそれぞれの第1駆動用部品256Aが、第1ステージ238の上方支持体251Bに固定され、X及びY駆動機252F,252S,254F,254Sのそれぞれの第2駆動用部品256Bが、第2ステージ240に固定される。 The design of each
本実施形態において、各駆動機252F,252S,254F,254Sに対して、駆動用部品256A,256Bの1つが、1以上の磁石を含む磁石アレイを有し、駆動用部品256B,256Aの1つが、1以上のコイルを含む導体アレイを有する。図2Bにおいて、各駆動機252F,252S,254F,254Sに対する第1駆動用部品256Aがコイルアレイを有し、各駆動機252F,252S,254F,254Sに対する第2駆動用部品256Bが磁石アレイを有する。この構成において、第2移動装置244に電力を供給する電気配線が、第2ステージ240に接続される必要はない。しかしながら、本発明は、この構成に限定されない。また、第1駆動用部品256Aがコイルアレイを有してもよく、第2駆動用部品256Bが磁石アレイを有してもよい。 In this embodiment, for each of the
図2Bにおいて、各X駆動機252F,252Sは、リニアモータであり、Z駆動機255及びY駆動機254F,254Sのそれぞれは、ボイスコイルモータである。なお、駆動機252F,252S,254F,254S,255のうちの1以上のものが、ロータリモータ、電磁駆動機、平面モータ、あるいは他の力を用いた駆動機のような、別タイプのモータであってもよい。例えば、X駆動機252F,252Sのそれぞれがボイスコイルモータでもよい。 In FIG. 2B, each of the
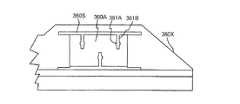
図2Cは、図2Bにおける第1ステージ238の上方支持体251Bが取り外されたステージ装置220の斜視図であり、図2Dは、その側面図である。これらの図は、第1ステージ238の下方支持体251Aに連結されたZ駆動機255を示す。より具体的には、第1駆動用部品256Aが、下方支持体251Aに連結されている。同様に、第2駆動用部品256Bが、Zレバー408(図4Dに示す)及びZ緩衝装置410(図4Dに示す)を介して下方支持体251Aに連結されている。 2C is a perspective view of the
ここで、この実施形態では、図2Dに示すように、Z軸に沿って及びX及びY軸周りに関して第1ステージ238に対して相対的な、Z駆動機255を有する第2ステージ240の移動範囲にわたり、駆動用部品256A,256B同士が互いに接しないように、X及びY駆動機252F,252S,254F,254Sにおける第1駆動用部品256Aと第2駆動用部品256Bとの間に十分な隙間258がある。 Here, in this embodiment, as shown in FIG. 2D, the movement of the
この実施形態では、ステージベアリング装置257(矢印で示す)が、第1ステージ238に対して第2ステージ240を支持する。一実施形態において、ステージベアリング装置257は、Z駆動機255に対して第2ステージ240を支持するとともに、概ねX及びY軸に沿ってかつZ軸周りに、Z駆動機255及び第1ステージ238に対して相対的な第2ステージ240の移動を可能にする。一実施形態において、ステージベアリング装置257は、流体タイプのベアリング、真空予圧型の流体ベアリング、あるいは磁気型のベアリングのような、1以上の非接触型のベアリングを有する。非接触型のベアリングを用いることにより、X及びY軸に沿った伝播性が極めて低い。換言すると、非接触型ベアリングは、第1ステージ238からの振動がX及びY軸に沿って第2ステージ240に伝わるのを抑制する。さらに、非接触ベアリングによって、第2ステージ240は、X及びY軸に沿ってかつZ軸周りに、抵抗が全く無いかそれに近い状態で移動することができる。一実施形態において、ステージベアリング装置257は、キネマティック式に第2ステージ240を支持するために、互いに離間した3つの非接触型ベアリングを有する。 In this embodiment, a stage bearing device 257 (indicated by an arrow) supports the
図3Aは、第2ステージ240と、図1の測定システム22に使用されるXミラー360X及びYミラー360Yと、第2移動装置244の一部と、ワークピース200とを上方から見た斜視図である。この実施形態において、第2ステージ240は、テーブル362と、テーブル362に固定されかつワークピース200を保持するチャック364とを有する。テーブル362は概ね矩形形状であり、テーブル362の右サイドには、突き出たネック状領域366Aが形成され、その領域366Aには、第1取付面366Bが形成されている。 3A is a perspective view of the
図3Aにおいて、各ミラー360X,360Yは、セラミック材料から作られるとともに概ねT字型の断面形状を有し、また、ミラー面と、互いに離れた3つの比較的薄い結合領域360Aとを有する。1以上の締め具360Fによって、結合領域360Aがテーブル362に取り付けられている。一実施形態において、各結合領域360Aは、ミラー面と各結合領域360Aとの間に配置された、1以上の細長いスロット360Sを有し、そのスロット360Sは、結合領域360Aに接した締め具360Fに起因する力と変形によって、それぞれのミラー360X,360Yの残りの部分が変形するのを抑制する。 In FIG. 3A, each
図3Bはミラーの1つであるXミラー360Xの斜視図であり、図3Cはその平面図、図3Dはその部分的な平面図である。これらの図は、Xミラー360Xの残りの部分から結合領域360Aを分離する1以上のスロット360Sを示す。また、これらの図は、締め具360F(図3Aに示す)が挿入される締め孔361Aと、締め孔361Aとスロット360Sとの間で延びる結合スロット361Bとを有する、少なくとも1つの結合領域360Aを示す。一実施形態において、結合スロット361Bは、結合領域360Aに接した締め具360Fに起因する力と変形によって、Xミラー360Xの残りの部分が変形するのを抑制する。 3B is a perspective view of an
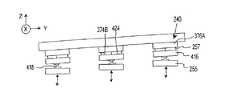
図3Aに戻り、第1X駆動機252F及びY駆動機254F,254Sにおける第2駆動用部品256Bは、テーブル362の右サイドに固定されており、第2X駆動機252Sの第2駆動用部品256Bは、テーブル362の左サイドに固定されている。また、第1X駆動機252Fの第2駆動用部品256Bは、Y駆動機254F,254Sの第2駆動用部品256B同士の間に配置されている。この実施形態において、各第2駆動用部品256Bは、U字形状の駆動ハウジング368Aと、ハウジング368Aに固定されかつ互いに離れた一対の磁石アレイ368Bとを有する。一実施形態において、取付ブラケット368Cによって、第1X駆動機252F及びY駆動機254F,254Sの駆動ハウジング368Aがテーブル362に固定されている。一実施形態において、取付ブラケット368Cは、概ね梁形状である。 Returning to FIG. 3A, the
図3Eは、第2ステージ240、及び第2移動装置244の一部を下から見た斜視図である。図3Eは、1つ以上のバランスウェイト370Aとテーブル362に取り付けられた1以上のストップ体370Bとを有する第2ステージ240を示している。バランスウェイト370Aは、第2ステージ240の重心(不図示)を調整するのに用いられる。したがって、バランスウェイト370Aの数、配置位置は、所望の重心が達成されるように様々に変更可能である。一実施形態において、1以上の締め具(不図示)が各バランスウェイト370A及びストップ体370Bをテーブル362に固定するために選択的に用いられる。 FIG. 3E is a perspective view of the
ストップ体370Bは、第2ステージ240における安全な接触領域を形成する。この構成により、Z駆動機255(図3Eでは不図示)が停止したとき、第2ステージ240を支持するために、ストップ体370Bが第1ステージ238(図3Eでは不図示)と係合することが可能である。ストップ体370Bのデザインや数は様々に変更可能である。図3Eにおいて、第2ステージ240は、概ね矩形状の互いに離間した3つのストップ体370Bを有する。 The stop body 370 </ b> B forms a safe contact area in the
図3Eにおいて、テーブル362の左サイドには、突き出た第2のネック状領域372Aが形成され、その領域372Aには、第1取付面366Bとほぼ反対側である第2取付面372Bが形成されている。第1取付面366Bは、第1表面長さ366Cと第1表面領域とを有している。同様に、第2取付面372Bは、第2表面長さ372Cと第2表面領域とを有している。特定の構成において、表面長さ366C,372C及び表面領域は、比較的小さい。非排他的実施形態において、各表面長さ366C,372Cは、約10、20、30、40、50、あるいは100mmよりも短い。また、非排他的実施形態において、各表面領域は、約5、10、20、30、40、あるいは50cm2よりも小さい。 In FIG. 3E, a protruding second neck-shaped
各X駆動機252F,252Sの駆動ハウジング368Aにおける駆動側取付面368Dは、ハウジング長さ368Eと取付側面領域とを有する。非排他的実施形態において、各ハウジング長さ368Eは、約30、50、70、100、125、150、175、あるいは200mmよりも長い。また、非排他的実施形態において、各取付側面領域は、約10、20、40、50、75、あるいは100cm2よりも大きい。 The drive
特定の実施形態において、第2X駆動機252Sのハウジング長さ368Eは、第2表面長さ372Cよりも長く、ハウジング側面領域は、第2取付面372Bにおける表面領域よりも大きい。非排他的実施形態において、各第2X駆動機252Sのハウジング長さ368Eは、第2表面長さ372Cに比べて、少なくとも約20、40、60、80、100、150、200、250、300、350、400、450、あるいは500%長い。また、非排他的実施形態において、第2X駆動機252Sのハウジング側面領域は、第2取付面372Bの表面領域に比べて、少なくとも約20、40、60、80、100、200、300、400、500、600、700、800、900、あるいは1000%大きい。この構成により、第2X駆動機252Sの第2駆動用部品256Bは、テーブル362の第2ネック状領域372Aから突き出ている。 In a specific embodiment, the
ここで、第2X駆動機252Sにおける第2駆動用部品256Bの温度変化は、第2駆動用部品256Bの長さ又は撓みの変化などの、変形を招く可能性がある。こうした温度変化は、第2X駆動機252Sのコイルからの熱、及び熱放射に起因する。 第2表面長さ372Cが比較的短く、また、第2駆動用部品256Bとテーブル362の第2ネック状領域372Aとの間に間隙が形成されていることから、第2駆動用部品256Bの変形の影響が低減される。 Here, the temperature change of the
概ね同様に、取付ブラケット368Cの駆動側取付面368Fは、ブラケット長さ368Gとブラケット表面領域とを有する。非排他的実施形態において、ブラケット長さ368Gは、約50、100、150、200、250、あるいは300mmよりも長い。また、非排他的実施形態において、ブラケット表面領域は、約10、20、40、60、80、100、120、あるいは150cm2よりも大きい。 In general, the drive
特定の実施形態において、ブラケット長さ368Gは、第1取付面366Bの表面長さ366Cよりも長く、ブラケット表面領域は、第1取付面366Bの表面領域よりも大きい。非排他的実施形態において、ブラケット長さ368Gは、第1取付面366Bの表面長さ366Cに比べて、少なくとも約20、40、60、80、100、150、200、250、300、350、400、450、あるいは500%長い。また、非排他的実施形態において、ブラケット表面領域は、第1取付面366Bの表面領域に比べて、少なくとも約20、40、60、80、100、200、300、400、500、600、700、800、900、あるいは1000%大きい。この構成により、駆動機252F,254F,254Sの第2駆動用部品256Bを有する取付ブラケット368Cは、テーブル362の第1ネック状領域366Aから突き出ている。 In certain embodiments, the
ここで、第1X駆動機252F及びY駆動機254F,254Sにおける第2駆動用部品256Bの温度変化は、取付ブラケット368Cの撓みなどの、変形を招く可能性がある。第1表面長さ366Cが比較的小さいことから、取付ブラケット368Cの変形の影響が低減される。 Here, the temperature change of the
一実施形態において、第2ステージ240はさらに、(i)取付ブラケット368Cを第1X駆動機252F及びY駆動機254F,254Sの第2駆動用部品256Bとともに第1取付面366Bに選択的に固定するための第1締結器373Aと、(ii)第2X駆動機252Sの駆動ハウジング368Aを第2取付面372Bに選択的に固定するための第2締結器373B(想像線で示される)とを有する。図3Bにおいて、各締結器373A,373Bは、4つの締め具373Cを有し、それらは、取付面366B,372Bのそれぞれにおいて、テーブル362に選択的に螺入される。なお、各締結器373A,373Bは、4を超えるあるいは4つ未満の締め具373Cを含んでもよい。この構成により、X駆動機252F,252S及びY駆動機254F,254Sの第2駆動用部品256Bは、容易に交換可能である。これは、ステージ装置上の駆動機を異なるタイプに容易に交換可能なモジュラー型の構成を可能にする。換言すると、この構成により、第2移動装置224の駆動機の再構成が容易である。 In one embodiment, the
ここで、一実施形態において、第1X駆動機252Fの第2駆動用部品256Aは、第2ステージ240の重心高さより上方に配置され、第2X駆動機252Sの第2駆動用部品256Aは、第2ステージ240の重心高さより下方に配置される。また、X駆動機252F,252Sは、正味の力が第2ステージ240の重心を通るように配置される。 Here, in one embodiment, the
図3Eにも示すように、テーブル362は、ステージベアリング装置257(図2Dに示す)と相互に作用する1以上のテーブルパッド374Aを有する。テーブルパッド374Aの数、位置、大きさや形状は、様々に変更可能である。この実施形態において、テーブル362は、互いに離間した3つのテーブルパッド374Aを有する。また、各テーブルパッド374Aは、概ね中空円盤形状であり、概ねZ駆動機255に面する平らな支持面374Bを有する。 As also shown in FIG. 3E, the table 362 has one or
図3Fは、テーブル362の一部、及び第2移動装置244の第2駆動用部品256Bの一部を示す模式図である。この図において、テーブル362の多くの表面形状が省略されている。具体的には、この図は、テーブル362のネック状領域366A及びネック状領域372Aを強調している。 FIG. 3F is a schematic diagram illustrating a part of the table 362 and a part of the
また、図3Fに示すように、第1X駆動機252F及びY駆動機254F,254Sの第2駆動用部品256Bがテーブル362の右サイドに固定され、第2X駆動機252Sの第2駆動用部品256Bがテーブル362の左サイドに固定されている。取付ブラケット368Cは、第1X駆動機252F及びY駆動機254F,254Sの駆動ハウジング368Aをテーブル362に固定している。 Also, as shown in FIG. 3F, the
図3Fはまた、(i)第1取付面366Bの第1表面長さ366Cと取付ブラケット368Cのブラケット長さ368Gとの関係、及び、(ii)第2取付面372Bの第2表面長さ372Cと駆動側取付面368Dのハウジング長さ368Eとの関係、を強調している。 3F also shows (i) the relationship between the
図3Gは、駆動ハウジング368A及び離間した複数の磁石アレイ368Bを有する1つのX駆動機252F,252Sにおける、第2駆動用部品256Bの斜視図である。この実施形態において、各磁石アレイ368Bは、断面三角形状の複数の磁石376Bを有する。なお、駆動ハウジング368Aは、セラミック材料から構成されてもよい。 FIG. 3G is a perspective view of the
図3H及び3Iはそれぞれ、テーブル362の一実施形態の分解斜視図である。この実施形態において、テーブル362は、上方第1テーブルセクション378Aと、第1テーブルセクション378Aの底に固定される中間第2テーブルセクション378Bと、第2テーブルセクション378Bの底に固定される下方第3テーブルセクション378Cとを有する。なお、テーブル362は、3未満あるいは3以上のテーブルセクションによって構成することも可能である。この構成により、テーブル362のそれらのセクションは、テーブル362の所望の特性を達成するように設計可能である。 3H and 3I are exploded perspective views of one embodiment of table 362, respectively. In this embodiment, the table 362 includes an upper
各テーブルセクション378A,378B,378Cの構成は、様々に変更可能である。図3H及び3Iにおいて、第1テーブルセクション378Aは、概ね平板状の上板380Aを有する。第2テーブルセクション378Bは、概ね平板状の中間板380Bと、横方向に延び且つ中間板380Bから上方に突き出た複数の中間壁380Cとを有する。ほぼ同様に、第3テーブルセクション378Cは、平板状の下板380Dと、横方向に延び且つ下板380Dから上方に突き出た複数の下壁380Eとを有する。 The configuration of each
壁380C,380Eの形状、配置位置や数は、テーブル362における所望の剛性、重量、振動特性が達成されるように様々に変更可能である。この実施形態において、中間壁380Cは、矩形の外形を有する周壁382Aと、同軸の筒状からなる2つの壁382Bと、内側のリングから外周に向かって放射状に延びた複数のラジアル壁382Cと、離間した3つの交差梁状の壁382Dとを有する。ほぼ同様に、この実施形態において、下壁380Eは、矩形の外形を有する周壁384Aと、同軸の筒状からなる2つの壁384Bと、内側のリングから外周に向かって放射状に延びた複数のラジアル壁384Cと、離間した3つの交差梁状の壁384Dとを有する。 The shape, arrangement position, and number of the
非排他的実施形態において、1つ以上の壁が、約1、2、5、7、10、15あるいは20mmの厚みを有する。 In non-exclusive embodiments, the one or more walls have a thickness of about 1, 2, 5, 7, 10, 15, or 20 mm.
テーブルセクション378A,378B,378Cは、接着材、締め具、溶接、ろう付け、あるいは他の適切な方法によって互いに固定される。一実施形態において、少なくとも1つのテーブルセクション378A,378B,378Cが、セラミック材料からなる。セクション378A,378B,378Cが互いに固定されることによって、テーブル362に、離間した複数の空洞が形成される。
ここで、図3H及び3Iに示されたテーブル362は、非常に堅くかつ軽量のテーブル362となるように配置された複数の壁を有する箱型構造である。さらに、このテーブル362は、ワークピースの交換を促進させる開口386を有する。 Here, the table 362 shown in FIGS. 3H and 3I is a box structure having a plurality of walls arranged to be a very stiff and lightweight table 362. In addition, the table 362 has an
一実施形態において、テーブル362は、約350mm×450mm、厚さ40mmである。また、非排他的実施形態である選択肢として、テーブル362は、7、6.5、6、5.8、5.5、あるいは5kg以下の質量を有する。さらに、非排他的実施形態において、テーブル362は、少なくとも、500、600、700、800、あるいは1000Hzの一次振動数を有する。 In one embodiment, the table 362 is approximately 350 mm × 450 mm and 40 mm thick. Also, as an option that is a non-exclusive embodiment, the table 362 has a mass of 7, 6.5, 6, 5.8, 5.5, or 5 kg or less. Further, in non-exclusive embodiments, table 362 has a primary frequency of at least 500, 600, 700, 800, or 1000 Hz.
図3Jは、さらに別の実施形態のテーブル362Jを示す分解斜視図である。この実施形態において、テーブル362Jは、上方第1テーブルセクション378AJと、第1テーブルセクション378AJの底に固定される中間第2テーブルセクション378BJと、第2テーブルセクション378BJの底に固定される下方第3テーブルセクション378CJとを有する。なお、テーブル362Jは、3未満あるいは3を超えるテーブルセクションによって構成することも可能である。 FIG. 3J is an exploded perspective view showing a table 362J of still another embodiment. In this embodiment, the table 362J includes an upper first table section 378AJ, an intermediate second table section 378BJ fixed to the bottom of the first table section 378AJ, and a lower third table fixed to the bottom of the second table section 378BJ. And a table section 378CJ. Note that the table 362J may be configured with less than three or more than three table sections.
図3Jにおいて、第1テーブルセクション378AJは、概ね平板状の上板380AJを有する。第2テーブルセクション378BJは、概ね平板状の中間板380BJと、横方向に延び且つ中間板380BJから上方に突き出た複数の中間壁380CJとを有する。ほぼ同様に、第3テーブルセクション378CJは、平板状の下板380DJと、横方向に延び且つ下板380DJから上方に突き出た複数の下壁380EJとを有する。 In FIG. 3J, the first table section 378AJ has a generally flat upper plate 380AJ. The second table section 378BJ has a substantially flat intermediate plate 380BJ and a plurality of intermediate walls 380CJ extending in the lateral direction and projecting upward from the intermediate plate 380BJ. In a similar manner, the third table section 378CJ has a flat plate-like lower plate 380DJ and a plurality of lower walls 380EJ extending in the lateral direction and projecting upward from the lower plate 380DJ.
この実施形態において、中間壁380CJは、外周壁382AJと、筒状の内壁382BJとを有する。ほぼ同様に、この実施形態において、下壁380EJは、外周壁384AJと、筒状の内壁384BJとを有する。 In this embodiment, the intermediate wall 380CJ has an outer peripheral wall 382AJ and a cylindrical inner wall 382BJ. In a similar manner, in this embodiment, the lower wall 380EJ has an outer peripheral wall 384AJ and a cylindrical inner wall 384BJ.
一実施形態において、テーブルセクション378AJ,378BJ,378CJのうちの少なくとも1つが、ハニカム型構造371J及び/又は成形材373Jを有する。図3Jにおいて、中間第2テーブルセクション378BJが、中間壁380CJの間に配置されたハニカム型構造371Jを有し、下方第3テーブルセクション378CJが、下壁380EJの間に配置された成形材373Jを有する。例えば、ハニカム型構造371Jは、アルミニウム、ダンボール、繊維強化プラスティックのような、様々な材料から構成可能な非常に複数の薄い壁を有する。例えば、成形材373Jは、ポリマー発泡体を有する。 In one embodiment, at least one of the table sections 378AJ, 378BJ, 378CJ has a
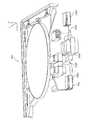
図4Aは、本発明に好ましく用いられるZ駆動機255の一実施形態の斜視図である。この実施形態において、Z駆動機255は、Z出力部400と、Zフレーム402と、Zベアリング404(矢印で示す)と、Z測定器406と、第1駆動用部品256Aと、第2駆動用部品256B(図4Bに示す)とを有する。これらの各構成要素のデザインは、Z駆動機255の設計要求に応じて様々に変更可能である。 FIG. 4A is a perspective view of an embodiment of a
Z出力部400は、Z軸に沿って、Zフレーム402に対して相対的に移動される。一実施形態において、Z出力部400は、Zレバー408と、Z減衰器410と、Zハウジング412と、1以上のハウジング支持体414と、Z移動体416と、接続部418とを有する。図4Aにおいて、Zレバー408は、剛体であり、Zフレーム402の一部を貫通して延びている。また、Zレバー408は、第2駆動用部品256Bの一部を支持する。 The
Z減衰器410は、Zレバー408の底に固定され、Zレバー408の底をZフレーム402に対して安定させる。一実施形態において、Z減衰器410は、Zレバー408の重量を支持し、Zレバー408がZフレーム402に対して移動するのを許容し、第1ステージ(図4Aでは不図示)からの振動(Z軸に沿ったものを含む)がZレバー408及び第2ステージ(図4Aでは不図示)に伝わるのを抑制する。その結果、Z駆動機255の振動伝播性が比較的低い。換言すると、Z減衰器410は、第1ステージから第2ステージに伝わるはずの振動レベルの抑制が可能である。また、非排他的実施形態である選択肢として、Z減衰器410は、第2ステージに伝わるはずの振動レベルを、少なくとも約1、5、10、20、30、40、50、60、70、80、90、99、あるいは100%近く抑制する。 The
Zハウジング412は、第2駆動用部品256Bの一部を支持する。図4Aにおいて、Zハウジング412は、平らな頂部420と、筒状の円筒部422とを有する。一実施形態において、Zハウジング412は、駆動用部品256A,256Bを囲む。 The
1以上のハウジング支持体414が、Zハウジング412をZレバー408に接続するとともに、第1駆動用部品256Aの一部がZハウジング412の下方に伸びて、Zフレーム402の上端に固定されることを可能にしている。 One or
Z移動体416は、概ね平らな円盤状であり、また、概ね平らで且つテーブル(図4Aでは不図示)に面する支持面424を有する。 The Z-moving
接続部418は、Z移動体416の底をZハウジング412の上端に、機械的かつフレキシブルに接続する。その結果、Z軸に沿ったZハウジング412の動きが、Z移動体416の動きとなる。接続部418のデザインは、ここで示される内容に従って様々に変更可能である。一実施形態において、接続部418は、Z移動体416とZハウジング412との間で伸びた屈曲部を有する。ここで、「屈曲部」は、いくつかの方向に対して比較的高い剛性を有し、他の方向に対して比較的低い剛性を有する部分を意味する。図4Aにおいて、屈曲部は、(i)X、Y及びZ軸、及びZ軸周りに比較的高い剛性を有し、また、(ii)X及びY軸周りに関して比較的柔軟である。比較的高い剛性と比較的低い剛性との比は、少なくとも約100/1であり、少なくとも約1000/1でもよい。 The connecting
この構成により、Z軸に沿ったZハウジング412の動きがZ軸に沿ったZ移動体416の動きとなる。一方で、接続部418は、Zハウジング412に対して相対的に、Z移動体416が傾いたり、X軸周り及びY軸周りに旋回したりすることを可能にする。なお、接続部418について、他の構成を採用することも可能である。 With this configuration, the movement of the
Zフレーム402は、Z出力部400を支持して、第1駆動用部品256Aを支持する。Zフレーム402の大きさ、形状、及びデザインは、様々に変更可能である。図4Aにおいて、Zフレーム402は、概ねE字状であり、上方バーセクション426Aと、下方バーセクション426Bと、上方バーセクション426Aと下方バーセクション426Bとの間に配置される中間バーセクション426Cと、上方、中間、及び下方バーセクション426A,426B,426Cを互いに接続する後方バーセクション426Dと、を有する。図4Aにおいて、上方バーセクション426A及び中間バーセクション426Cは、Zレバー408を受け入れるための開口426Eを有し、下方バーセクション426Bは、Zレバー408の一部を受け入れるためのスロット426Fを有する。さらに、上方バーセクション426A及び中間バーセクション426Cはそれぞれ、Zフレーム402内へのZレバー408の配置のための、選択的に着脱自在な着脱部428を有する。 The
下方バーセクション426Bは、第1ステージ238の上端に固定される。また、第1駆動用部品256Aは、上方バーセクション426Aに固定される。 The
Zベアリング404は、Zフレーム402に対するZレバー408の相対的な動きを案内する。一実施形態において、Zベアリング404は、Z軸に沿ったZレバー408の動き(純粋な垂直動作)を許容するとともに、X及びY軸に沿った、またX及びY軸周りに関する、Zフレーム402及び第1ステージに対する相対的なZレバー408の動きを抑制する。一実施形態において、Zベアリング404は、流体タイプのベアリング、あるいは磁気型のベアリングのような、非接触型のベアリングであり、中間バーセクション426CとZレバー408との間に配置される。非接触型のベアリングによって、Zレバー408は、Z軸に沿って、抵抗が全く無いかそれに近い状態で移動することができる。 The
Z測定器406は、Zフレーム402に対するZレバー408の相対的な動きを測定する。Z測定器406は、Z方向に関して、Zフレーム402(第1ステージ238)に対するZレバー408の相対位置を検出する。一実施形態において、この情報は、エアベローズのような、Z減衰器410のZ軸に沿った動き(伸縮)に実質的に相当する。図4Aに示す実施形態において、Z測定器406は、リニアエンコーダである。Zレバー408の動きに関する情報は、制御システム24がZ駆動機255を制御できるように、制御システム24(図1に示す)に送られてもよい。また、例えば、Z測定器406は、静電容量型のゲージ、あるいは他のタイプのセンサーでもよい。 The
また、後で詳しく説明する実施形態に示すように、Z測定器406からの情報は、第1ステージから第2ステージに伝わる振動レベルを低減するのに用いることができる。さらに、特定の実施形態において、Z測定器406からの情報は、計測システムの初期化に用いることともできる。 Further, as shown in an embodiment described in detail later, information from the
図4Bは、Z出力部400及び第2駆動用部品256Bの断面斜視図であり、図4Cは、断面平面図である。この実施形態において、Zレバー408は、概ね筒形状である。 4B is a cross-sectional perspective view of the
図4B及び4Cにおいて、Z減衰器410は、流体ベローズであり、(i)Zレバー408の底に固定された頂部と、(ii)Zフレーム402(図4Aに示す)に取り付けられる底部とを有する。この構成により、Z減衰器410は、Z軸周りのZ出力部400の回転を抑制する。流体ベローズ内の流体の圧力は、Z減衰器410に対する要求に適するように調整される。一実施形態において、流体圧力は、流体ベローズ内にセットされた状態のまま変更されない。あるいは、例えば、流体圧力が流体源(不図示)とともに調整及び制御されてもよい。さらに別の実施形態において、Z減衰器410は、スプリングあるいは別の減衰デバイスであってもよい。 4B and 4C, the
また、図4B及び4Cは、第2駆動用部品256Bの詳細も示している。この実施形態において、第2駆動用部品256Bは、Zハウジング412の内側に固定された筒状の外側マグネット430Aと、それに離間しかつ同軸な筒状の内側マグネット430Bとを有する。内側マグネット430Bの底は、Zレバー408の上端に固定され、内側マグネット430Bの上端は、Zハウジング412の頂部420の底に固定されている。 4B and 4C also show details of the
また、図4B及び4Cは、Zレバー408の上端とZハウジング412の底との間で伸びたハウジング支持体414を示している。 4B and 4C show a
図4Dは、Z出力部400、第1駆動用部品256A、及び第2駆動用部品256Bの部分的な拡大断面図である。この実施形態において、第1駆動用部品256Aは、マグネット430A,430Bと同軸配置される筒状のコイル432Aと、離間した複数の脚部432Bとを有し、複数の脚部432Bは、離間した複数のハウジング支持体414の間において、コイル432Aから下方に伸びている。脚部432Bは、コイル432AをZフレーム(図4Dでは不図示)に固定するために用いられる。この構成により、コイル432Aを電流が流れると、マグネット430A,430B及びZ出力部400がZ軸に沿って移動する。矢印433は、マグネットの磁化方向を示す。 FIG. 4D is a partially enlarged cross-sectional view of the
また、図4Dは、屈曲部418の詳細を示す。より具体的には、この実施形態において、屈曲部418は、(i)Z移動体416の底に固定される上方円盤状領域434Aと、(ii)Zハウジング412の上端に固定される下方円盤状領域434Bと、(iii)領域434A,434Bを互いに接続する、フレキシブルな接続片434Cとを有する。 FIG. 4D shows details of the
図5は、第2ステージ240の傾きに伴う、第2ステージ240、3つのZ駆動機255の一部、及びステージベアリング装置257(矢印で示す)の関係を示す模式図である。具体的には、図5に示すように、(i)各テーブルパッド376Aが1つのZ駆動機255の移動体416に位置決めされ、(ii)ステージベアリング装置257によって移動体416からテーブルパッド376Aが離間した状態が維持され、(iii)残りのZ駆動機255に対する各移動体416の傾きを接続部418が許容している。その結果、第2ステージ240が傾いている間、テーブルパッド376Aの支持面374Bが移動体416の支持面424とほぼ平行になるように、移動体416が傾く。ここで、Z軸に沿ったZ駆動機255からの純粋なZ運動は、第2ステージ240を傾けるのに用いることができる。 FIG. 5 is a schematic diagram showing a relationship between the
図6Aは、別の実施形態である第2移動装置644を有する第2ステージ640の上からの斜視図であり、図6Bは、下からの斜視図である。第2移動装置644は、第1X駆動機652Fと、第2X駆動機652Sと、第1Y駆動機654Fと、第2Y駆動機654Sとを有する。この実施形態において、第2ステージ640は、上記の第2ステージ240と同様である。一方で、この実施形態において、第2移動装置644のX及びY駆動機652F,652S,654F,654Sが異なる。 FIG. 6A is a perspective view from above of the
この実施形態において、X及びY駆動機652F,652S,654F,654Sのそれぞれは、EIコアアクチュエータのような、吸引タイプのアクチュエータである。EIコアアクチュエータの一例が米国特許第6,069,471号明細書に記載されており、そのすべてを援用して本文の記載の一部とする。この実施形態において、第1駆動用部品656Aは、第1ステージ(図6A及び6Bでは不図示)に固定された一対のEコア及び筒状導体を有し、第2駆動用部品656Bは、第2ステージ640に固定されたIコアである。 In this embodiment, each of the X and
ここで、X及びY駆動機652F,652S,654F,654Sは、上記のX及びY駆動機252F,252S,254F,254Sが第2ステージ240に固定された方法と同様の方法で第2ステージ640に固定されている。これによって、ステージ装置において、異なるタイプの駆動機に容易に再構成するのが可能になる。 Here, the X and
図7Aは、別の実施形態である第2移動装置744を有する第2ステージ740を上から見た斜視図であり、図7Bは、横から見た斜視図である。この実施形態において、第2ステージ740は、上記の第2ステージ240と同様である。一方で、この実施形態において、第2移動装置744は、X駆動機752Fの第1ペア(1つのみ図示)と、X駆動機753Fの第2ペア(1つのみ図示)と、第1Y駆動機754Fと、Y駆動機755F,755Sの第2ペアとを有する。 FIG. 7A is a perspective view of a
この実施形態において、(i)第1ペアの各X駆動機752Fは、EIコアアクチュエータであり、(ii)第2ペアの各X駆動機753Fは、ボイスコイルモータであり、
(iii)Y駆動機754Fは、EIコアアクチュエータであり、(iv)第2ペアの各Y駆動機755F,755Sは、ボイスコイルモータである。この構成により、例えば、(i)X駆動機752Fの第1ペアをX軸に沿った第2ステージ740の素早い粗動に用いることができ、(ii)X駆動機753Fの第2ペアをX軸に沿った第2ステージ740の精密移動に用いることができ、(iii)Y駆動機754FをY軸に沿った第2ステージ740の素早い粗動に用いることができ、(iv)Y駆動機755F,755Sの第2ペアを、Y軸に沿った、また、Z軸周りに関する第2ステージ740の精密な移動に用いることができる。In this embodiment, (i) each first pair of X drives 752F is an EI core actuator, and (ii) each second pair of X drives 753F is a voice coil motor,
(Iii) The
ここで、X及びY駆動機752F,753F,754F,755F,755Sは、上記のX及びY駆動機252F,252S,254F,254Sが第2ステージ240に固定された方法と同様の方法で第2ステージ740に固定されている。これによって、ステージ装置において、異なるタイプの駆動機に容易に再構成するのが可能になる。 Here, the X and
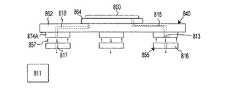
図8は、模式図であり、(i)ワークピース800、(ii)テーブル862、チャック864、及び3つのテーブルパッド874Aを有する第2ステージ840、(iii)3つのZ駆動機855のZ移動体816、及び(iv)ステージベアリング装置857を示す。より具体的には、図8は、低圧あるいは真空などの大気圧とは異なる圧力の流体が流体源811からチャック864に送られる状態の一実施形態を示す。 FIG. 8 is a schematic diagram: (i) a
この実施形態において、ステージベアリング装置857は、真空予圧型の流体ベアリングである。また、2つのテーブルパッド874Aは、ステージ通路815,818(想像線で示す)を介してチャック864と流体的につながる入口ポート813を有する。一実施形態において、各移動体816は、流体源811と流体的につながり且つステージベアリング装置857に真空を供給する出口ポート817を有する。 In this embodiment, the stage bearing device 857 is a vacuum preload type fluid bearing. Also, the two
この構成により、第2ステージ840の一部である入口ポート813は、第2ステージ840とともに移動し、出口ポート817は第1ステージとともに移動する。その結果、入口ポート813は、出口ポート817に対して相対的に6自由度に移動することができる。さらに、この構成により、流体源811によって作られた、真空予圧型の流体ベアリング857を構成するための真空の一部を、テーブル862に流用することが可能である。ステージ通路815を経由して供給された真空はチャック864に送られ、ワークピース800をチャック864に保持するためにチャック864に使用される真空が形成される。また、ステージ通路818を経由して供給された真空は、テーブル862を通過してチャック864に送られ、チャック864を第2ステージ840に保持するための真空が形成される。また、この構成により、流体(真空)源811からチャック864まで伸びるホースを設けることなく、真空源811をチャックに接続することが可能である。ここで、入口ポート813と出口ポート817との間には、その間に伸びるホースあるいはチューブのような流体用の導管はない。 With this configuration, the
図9Aは、図2Aから4Dに示された、ステージ装置220の一部の模式図であり、ステージ装置220は、第1ステージ238と、第2ステージ240と、Z駆動機255とを有する。図9Aには、Z出力部400、Zフレーム402、Z測定器406、第1駆動用部品256A、及びZ駆動機255の第2駆動用部品256Bが示されている。また、図9Aには、Zレバー408、Z減衰器410、各Z出力部400のZ移動体416が示されている。 FIG. 9A is a schematic view of a part of the
上述したように、Z減衰器410は、Zレバー408の底に固定されており、Zレバー408の底を第1ステージ238に連結している。一実施形態において、Z減衰器410は、Zレバー408の重量及び第2ステージ240の重量を支持し、第1ステージ238に対して相対的にZレバー408が移動するのを可能にし、また、第1ステージ238からZレバー408及び第2ステージ240に伝わる振動レベルを低減する。ここで、Z減衰器410はそれぞれ、ある程度の剛性を有している。非排他的な実施形態において、例えば、各Z減衰器410におけるZ軸に沿った剛性(K)は、約0.1、0.5、1、2、5、10、15、あるいは20N/mmである。 As described above, the
減衰器410の剛性によって、地表あるいは周辺から第1ステージ238に伝わる外乱の少なくとも一部が、減衰器410を介して第2ステージ240に伝わる。 Due to the rigidity of the
各Z駆動機255に対して、Z測定器406は、第1ステージ238あるいは他の参照に対して相対的な、Zレバー408及びZ減衰器410の一部(例えば頂部)の動き及び/又は位置を測定する。後述するように、制御システム24によるZ減衰器410の剛性及びダンピングを補償するZ駆動機255の制御が可能となるように、Zレバー408の動きに関する情報が、制御システム24(図1に示す)に送られる。 For each Z-
特定の実施形態において、第1ステージ238に伝わる外乱(地表あるいは周辺などからの)は、X,Y及びZ軸に沿った、また、X,Y及びZ軸周りに関する、第1ステージ238の動作乱れを引き起こす。図9Aに示す減衰器410によって、(i)X,Yに沿った、また、Z軸周りに関する、第1ステージ238の動作乱れが第2ステージ240に伝わらない、(ii)Z軸に沿った、また、X及びY軸周りに関する、第1ステージ238の動作乱れが、減衰器410の一部及びZレバー408におけるZ軸に沿った小さな変位を生じさせる。Z測定器406は、この変位の測定に用いることができる。また、この情報によって、その変位の速度を算出可能である。後述するように、変位及び速度情報を用いることにより、制御システム24は、Z駆動機255を制御し、減衰器410を通して伝わった乱れを補償することができる。 In certain embodiments, disturbances transmitted to the first stage 238 (such as from the ground surface or the surroundings) act on the
一実施形態において、+vの速度上昇での+dの変位上昇を伴うZレバー408の移動を招いた第1ステージ238の動きを、Z測定器406が検出すると、制御システムは、Zレバー408の好ましくない変位上昇分を、解消、修正及び/又は減少させるために、Zレバー408に下向きの力が働くように、第1駆動用部品256Aに対して適切な値の出力を行う。同様に、−vの速度降下での−dの変位降下を伴うZレバー408の移動を招いた第1ステージ238の動きを、Z測定器406が検出すると、制御システムは、Zレバー408の好ましくない変位降下分を、解消、修正及び/又は減少させるために、Zレバー408に上向きの力が働くように、第1駆動用部品256Aに対して適切な値の出力を行う。好ましくない変位が全て解消されると、第2ステージ240は、第1ステージ238の動作乱れから分離される。 In one embodiment, when the
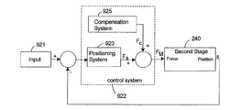
図9Bは、模式的なブロック図であり、Z軸に沿って及び、X及びY軸周りに、第2ステージ240を精密に位置決めするための、第2移動装置244によるZ駆動機255の制御を示す。この実施形態において、第2ステージ240の目標位置は、システムに入力されるインプット921である。目標位置は、測定システム22によって生成された、第2ステージ240のセンサー信号ベクトルSと比較される。インプット921とセンサー信号ベクトルSとの比較によって、相違ベクトルが割り出される。制御システム922(制御システム22)は、第2ステージ240をZ軸に沿って正確に位置決めする指示のための、Z駆動機255に対する出力を割り出す。 FIG. 9B is a schematic block diagram showing the control of the
一実施形態において、制御システム922は、(i)第2ステージ240の位置決めに必要なZ駆動機255に対する出力値を算出する位置決めシステム923と、(ii)Z減衰器410の剛性及びダンピングの少なくとも一部の補償、及び/又は、Z減衰器410を介して第1ステージ238から第2ステージ240に伝わる振動レベルの少なくとも一部の低減、に必要なZ駆動機255に対する出力値を算出する補償システム925とを有する。制御システム922は、例えば、PID(proportional integral derivative)制御器や、比例ゲインコントローラ、リードラグフィルタ、あるいは制御技術に関する他の一般的に知られたものを有してもよい。 In one embodiment, the
Z駆動機255に対する出力によって、第2ステージ240をターゲットとした総駆動力FMが作られる。一実施形態において、総駆動力は、サーボ力成分FSと、補償力成分FCとを有する。サーボ力成分FSは、第2ステージ240の位置決めのために、第2ステージ240に送られる。補償力成分FCは、Z減衰器410の剛性の少なくとも一部のオフセット及び/又は補償、及び/又はZ減衰器410を介して第1ステージ238から第2ステージ240に伝わる振動レベルの少なくとも一部の低減のために、第2ステージ240に送られる。換言すると、補償力成分FCは、Z減衰器410を通過する第1ステージ238からの乱れの力FD(不図示)を解消するために、負の剛性項及び負のダンピング項を含む。補償力成分FCと乱れの力FDとがほぼ同等の逆関係である場合に、乱れが解消されかつ補償される。なお、非排他的実施形態において、補償力成分FCの絶対値は、乱れの力FDの絶対値の、少なくとも約10、20、40、50、70、80、90、99、100、あるいは110%である。 The total driving force FM targeting the
特定の実施形態において、Z駆動機255の性能は相対的に良好であり、Z駆動機255は、補償力成分FCによって打ち消すことが可能な、安定性、再現性、線形剛性を有する。なお、非排他的な実施形態において、補償力成分FCは、Z減衰器410を介して第1ステージ238から第2ステージ240に伝わるはずの乱れ及び/又は振動のレベルを、少なくとも約1、5、10、20、30、40、50、60、70、80、90、99、あるいは100%、低減することができる。 In certain embodiments, the performance of the
1自由度のシステムにおいて、第1ステージ238に対する相対的な第2ステージ240の動力学は、下式で表すことができる。
Ma+Cv+Kd=F …式(1)In a one degree of freedom system, the dynamics of the
Ma + Cv + Kd = F Formula (1)
ここで、Mは第2ステージ240の質量であり、CはZ減衰器410のダンピングを表し、KはZ減衰器の剛性を表し、Fは1軸(例えば、Z軸)に沿って第2ステージ240に働く力、aは加速度、vは速度、dは変位である。変位及び速度の情報が有効である場合に、Z減衰器410の剛性(K)及びダンピング(C)の補償にZ駆動機255を使用することができる。Zレバー408の変位及び速度に関する情報は、Z測定器406によって測定することができる。
If F=Cv+Kd+u …式(2)Here, M is the mass of the
If F = Cv + Kd + u (2)
ここで、uはサーボ力成分FS(目標の力)である。式(1)と式(2)との組み合わせにより、以下の式が成り立つ。
Ma=u …式(3)Here, u is a servo force component FS (target force). The following expression is established by the combination of Expression (1) and Expression (2).
Ma = u Formula (3)
一実施形態において、変位dをトラジェクトリー・コマンドrとするのが望ましく、このときuはMaとなる。
Ma−Ma=0 …式(4)
そこで、dをrとする。In one embodiment, it is desirable that the displacement d be a trajectory command r, where u is Ma.
Ma−Ma = 0 Formula (4)
Therefore, d is r.
一般的な6自由度システムにおいて、1自由度システムに用いたのと同じ手法を利用することが可能である。6自由度システム力学は、行列形式で表すことができる。
[M]qa−[C]qv+[K]qd=F …式(5)In a general six-degree-of-freedom system, it is possible to use the same method as that used for the one-degree-of-freedom system. Six degree of freedom system dynamics can be expressed in matrix form.
[M] qa- [C] qv + [K] qd = F Formula (5)
システムにおける剛性マトリクス[K]及びダンピングマトリクス[C]が算出されると、それらの補償に必要な駆動力を算出することができる。
F=[C]qv+[K]qd+u …式(6)When the stiffness matrix [K] and the damping matrix [C] in the system are calculated, the driving force necessary to compensate them can be calculated.
F = [C] qv + [K] qd + u Formula (6)
式(5)及び(6)は、式(1)及び(2)と同じ形式である。したがって、より一般化されたベクトル及びマトリクスを用いることによって、6自由度システムにおいて同様の目標を達成することができる。 Equations (5) and (6) are in the same form as equations (1) and (2). Thus, similar goals can be achieved in a six degree of freedom system by using more generalized vectors and matrices.
シミュレートテストの結果は、第1ステージ及び第2ステージを有するステージ装置上で実行されたものである。図9Cから9Eは、グラフ図であり、Z軸に沿った、X軸に沿った、及びY軸に沿った、伝播性のシミュレートテストの結果をそれぞれ示す。伝播性は、異なる周波数にわたる、第1ステージと第2ステージとの間の変位の割合として明示している。シミュレート結果は、剛性及びダンピングの補償によって伝播性が大幅に低減したことを示している。図9Cから9Eは、6自由度シミュレーションによって生成された第1ステージと第2ステージとの間の伝播性のボード線図を示す。振動の100%が第1ステージから第2ステージに伝わるとすると、伝播性の大きさは、1.0、あるいは、0dB(各図9C〜9Eの頂部の線図)である。第2ステージの位置決め正確性の向上のために、第1ステージからの乱れが第2ステージに伝わるのが抑制される。換言すれば、伝播性が、可能な限り小さくなる(図9C〜9Eでは、規模(最大)の負の数値がプロットされている。)。 The result of the simulated test was executed on a stage apparatus having a first stage and a second stage. FIGS. 9C to 9E are graphs showing the results of the simulated propagation test along the Z axis, along the X axis, and along the Y axis, respectively. Propagation is manifested as the rate of displacement between the first stage and the second stage over different frequencies. The simulated results show that the propagation properties are greatly reduced by compensation for stiffness and damping. FIGS. 9C to 9E show Bode diagrams of the propagation between the first stage and the second stage generated by the 6-degree-of-freedom simulation. Assuming that 100% of the vibration is transmitted from the first stage to the second stage, the magnitude of the propagation property is 1.0 or 0 dB (the top diagrams in FIGS. 9C to 9E). In order to improve the positioning accuracy of the second stage, the disturbance from the first stage is prevented from being transmitted to the second stage. In other words, the propagation is as small as possible (in FIGS. 9C-9E, negative values of scale (maximum) are plotted).
図9Cから9Eは、2つのケースの間の伝播性を比較している。ベンチマークケース(破線)は、剛性及びダンピング補償が使用されなかったときの成績である。補償が動作すると(補償ケースは実線で示される)、特に低周波数域において、伝播性の規模が減少する。図9Cから9Eにおいて、X軸は、1、2、5、10、20、50、あるいは100dBの値を有する。 Figures 9C to 9E compare the propagation between the two cases. The benchmark case (dashed line) is the result when stiffness and damping compensation were not used. When compensation operates (compensation case is indicated by a solid line), the scale of propagation decreases, especially in the low frequency range. 9C to 9E, the X axis has a value of 1, 2, 5, 10, 20, 50, or 100 dB.
一実施形態において、各Z駆動機の剛性は、第2ステージをゆっくりと上下に移動させるようにZ駆動機を制御することによって実験的に測定することができる。測定された剛性は、適切な補償力FCを直ちに算出するために、制御システムによって使用される。一実施形態において、例えば、第2ステージは、約0.5秒の間に約2mmの範囲で上下に移動される。 In one embodiment, the stiffness of each Z drive can be measured experimentally by controlling the Z drive to slowly move the second stage up and down. The measured stiffness is used by the control system to immediately calculate an appropriate compensation force FC. In one embodiment, for example, the second stage is moved up and down in a range of about 2 mm in about 0.5 seconds.
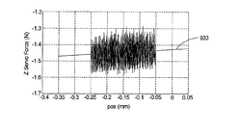
図9Fは、グラフ図であり、Z駆動機による第2ステージの低速移動の間に、Z駆動機によって働く総駆動力のテスト結果を、第2ステージの位置に対して示している。図9Fにおいて、ライン931は、線形剛性を表しており、ここでは3つのZ駆動機における3つの剛性の合計である。この実施形態において、剛性は約9N/mmである。 FIG. 9F is a graph showing the test result of the total driving force exerted by the Z drive during the low speed movement of the second stage by the Z drive with respect to the position of the second stage. In FIG. 9F,
図9Gは、Z駆動機を制御する剛性補償の効果を示すグラフ図である。図9Gにおいて、ライン933は、第2ステージの重心に働く総剛性を表している。この実施形態において、第2ステージに働く総剛性は、約50N/mに縮小した。 FIG. 9G is a graph showing the effect of stiffness compensation for controlling the Z drive machine. In FIG. 9G,
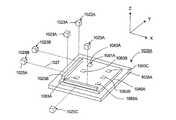
図10Aは、本発明の特徴を備えるステージ装置1020Aを上から見た模式的な斜視図である。例えば、ステージ装置1020Aは、図1の露光装置10における、ウエハステージ装置20として、あるいはレチクルステージ装置18として用いることができる。また、ステージ装置1020Aは、他のタイプのデバイスを移動させるのに用いることができる。 FIG. 10A is a schematic perspective view of a
図10Aに示されるステージ装置1020Aの構成要素は、第1ステージ1038Aと、第2ステージ1040Aと、測定システム1022Aと、初期化システム1081A(想像線で示す)とを有する。ステージ1038A,1040Aは、対応する上述したデザインと同様のデザインにすることができる。ステージ装置1020Aの第1移動装置及び第2移動装置は、図10Aでは不図示である。移動装置は、図2Aから4Dに示した、上述した構成要素と同様の構成にすることができる。例えば、第1移動装置は、X及びY軸に沿って、及び、Z軸周りに、第1ステージ1038Aを駆動するのに用いられ、第2移動装置は、X、Y、及びZ軸に沿って、及び、X、Y、およびZ軸周りに、第2ステージ1040Aを駆動するのに用いられる。また、例えば、第1移動装置は、3を超える又は3未満の自由度で第1ステージ1038Aを駆動する構成とすることもでき、及び/又は、第2移動装置は、6未満の自由度で第2ステージ1040Aを駆動するのに用いることもできる。 The components of
測定システム1022Aは、第2ステージ1040Aの位置を常にモニターする。この情報により、第2移動装置は、第2ステージ1040Aを正確に位置決めするように制御される。測定システム1022Aの構成は、第2ステージ1040Aの自由度に応じて様々に変更可能である。例えば、測定システム1022Aは、少なくとも1軸に沿って及び/又は少なくとも1軸周りに関し、第2ステージ1040Aの位置を測定することができ、また、複数のレーザ干渉計、エンコーダ、及び/又は、他の測定デバイスを利用することもできる。 The
一実施形態において、図10Aに示すように、測定システム1022Aは、3軸及び3軸周りに関して、協調して第2ステージ1040Aの位置をモニターする6つの干渉計システム1023A−1023Cを有する。より具体的には、この実施形態において、測定システム1022Aは、(i)Z軸に沿って及びX軸及びY軸周りに関して、第2ステージ1040Aの位置を協調して測定する、離間した3つのZ干渉計システム1023Aと、(ii)X軸に沿って及びZ軸周りに関して、第2ステージ1040Aの位置を協調して測定する2つのX干渉計システム1023Bと、(iii)Y軸に沿って第2ステージ1040Aの位置を測定するY干渉計システム1023Cと、を有する。この実施形態において、各干渉計システム1023A−1023Cは、第2ステージ1040Aから離れて配置された第1干渉計部品1025Aと、第2ステージ1040Aに固定され第2ステージ1040Aとともに移動する第2干渉計部品1025Bとを有する。干渉計部品1025A,1025Bの正確な位置は、ステージ装置1020Aの所望の性能を達成するために様々に変更可能である。 In one embodiment, as shown in FIG. 10A,
図10Aに示す実施形態において、(i)各第1干渉計部品1025Aは、第2干渉計部品1025Bにレーザビーム1027を照射しかつその第2干渉計部品で反射したビームを受ける干渉計ブロックであり、(ii)各第2干渉計部品1025Bは、ミラーなどの反射体である。また、第1干渉計部品が反射体を有しかつ第2干渉計部品が干渉計ブロックを有する構成とすることもできる。適切なレーザ干渉計は、カルフォルニア、サンタクララのアジレントで販売されている。 In the embodiment shown in FIG. 10A, (i) each
特定の実施形態において、X、Y、及びZ軸周りに関する、第2ステージ1040Aの機械的動作範囲は、1以上の干渉計システム1023A−1023Cの作動範囲よりも広い。換言すると、1以上の干渉計システム1023A−1023Cは、作動回転範囲に制限がある。例えば、各干渉計システム1023A−1023Cが適切に機能するために、干渉計ブロックからのビーム1027は、反射体(第2干渉計部品)で反射されてその干渉計ブロックに戻る必要がある。反射体の角度が作動回転範囲内にない場合、干渉計ブロックにビームが戻らない可能性がある。一実施形態において、各Z干渉計システム1023Aは、FA作動範囲を有し、各X干渉計システム1023Bは、SA作動範囲を有し、Y干渉計システム1023Cは、TA作動範囲を有する。 In certain embodiments, the mechanical operating range of the
制限された各作動回転範囲の大きさは、干渉計システム1023A−1023Cのタイプに応じて様々に変更可能である。例えば、1つのタイプの干渉計システム1023A−1023Cにおいて、適切に機能するためには、反射体がビーム1027に対して90°±0.06°である必要がある。この構成において、作動範囲は、約0.12°である。また、非排他的な実施形態において、作動範囲は、約0.01、0.05、0.1、あるいは0.5°である。 The size of each limited operational rotation range can be varied depending on the type of
ステージ装置1020Aに最初に出力が加えられたとき、第2ステージ1040Aは、通常、未知の方位にあり、また、第2ステージ1040Aが作動範囲外に回転していて1以上の干渉計システム1023A−1023Cが稼動しない可能性がある。例えば、FA作動範囲を超えて、第2ステージ1040AがX軸又はY軸周りに回転している場合、Z干渉計システム1023Aが機能しない可能性がある。ほぼ同様に、SA作動範囲及びTA作動範囲を超えて第2ステージ1040AがZ軸周りに回転している場合、X及びY干渉計システム1023B,1023Cが機能しない可能性がある。 When power is first applied to the
この構成において、初期化システム1081Aは、干渉計システム1023A−1023Cが未稼動の際に、第2ステージ1040Aが正確な方位に調整されるようにする。一実施形態において、初期化システム1081Aは、第2ステージ1040Aが作動範囲を超えて回転しているときの、第2ステージ1040Aの位置をモニターする。この実施形態において、初期化システム1081Aは、第2ステージ1040Aが作動範囲外にある及び/又は第2ステージ1040Aの機械的最大動作範囲を超えているときの、第2ステージ1040Aの位置を測定可能な1以上のセンサーを有する。 In this configuration, the
図10Aに示す実施形態において、初期化システム1081Aは、6つの初期センサー1083A−1083C(想像線で示される)を有し、それらはすなわち、(i)Z軸に沿って及びX軸周り及びY軸周りに関して、第1ステージ1038Aに対する第2ステージ1040Aの位置を協調して測定する離間した3つのZセンサー1083Aと、(ii)X軸に沿って及びY軸周りに関して、第1ステージ1038Aに対する第2ステージ1040Aの位置を協調して測定する離間した2つのXセンサー1083Bと、(iii)Y軸に沿って、第1ステージ1038Aに対する第2ステージ1040Aの位置を測定するYセンサー1083Cと、を有する。なお、例えば、初期化システム1081Aは、6未満あるいは6を超えるセンサー、及び/又は、第1ステージ1038A以外の他の構造物に対して移動体を参照可能な1以上のセンサーを有してもよい。 In the embodiment shown in FIG. 10A, the
一実施形態において、1以上の初期センサー1083A−1083Cは、固定されたゼロ位置を有するアブソリュート型とすることができる。そうしたタイプのセンサーの1つとして、静電容量ゲージがある。他のアブソリュート型のセンサーとして、ポテンショメータ、LVDTS、及び多くの光学センサーがある。アブソリュート型のセンサー1083A−1083Cにより、X,Y,及び/又はZ軸周りに関する第2ステージ1040Aの所望の方位を、特定の検出値に関連付けることができる。アブソリュート型のセンサー1083A−1083Cに対する正確な目標値は、制御システム24(図1に示す)の初期化ソフトウェアプログラムに保存することができる。アブソリュート型のセンサーの使用により、干渉計システム1023A−1023Cの比較的高速での初期化が可能となる。 In one embodiment, the one or more
別の実施形態において、1以上の初期センサー1083A−1083Cは、第1ステージ1038Aに対する第2ステージ1040Aのインクリメンタルな動きを測定するインクリメンタル型のセンサーとすることもできる。そうしたタイプのセンサーの1つとして、エンコーダがある。図10Aに示す実施形態では、ステージ装置1020Aが始動すると、初期化プロセスが開始し、制御システムが、初期センサー1083A−1083Cからの位置情報を用いて第2移動装置を制御する。この制御は、初期の比較的低いバンドウィドスにおいて、オプション的に生じる。この構成により、その初期位置から目標位置に向けて第2ステージ1040Aが徐々に移動するように、第2移動装置が制御される。第2ステージ1040Aが正確な方位で一旦安定すると、干渉計システム1023A−1023Cが初期化される。その後、干渉計システム1023A−1023Cからの位置情報を用いて制御システムが第2移動装置を制御する。任意的に、バンドウィドスが変化して高くなる。 In another embodiment, the one or more
図10Bは、本発明の特徴を有するステージ装置1020Bの別の実施形態の一部の、模式的な上からの斜視図である。例えば、ステージ装置1020Bは、図1の露光装置10における、ウエハステージ装置20として、あるいはレチクルステージ装置18として用いることができる。また、ステージ装置1020Bは、他のタイプのデバイスを移動させるのに用いることができる。 FIG. 10B is a schematic top perspective view of a portion of another embodiment of a
図10Bに示されるステージ装置1020Bの構成要素は、第1ステージ1038Bと、第2ステージ1040Bと、測定システム1022Bと、初期化システム1081Bとを有する。ステージ1038B,1040B、及び測定システム1022Bは、対応する上述したデザインと同様のデザインにすることができる。図10Bにおいて、測定システム1022Bはまた、3軸に沿って及び3軸周りに関して、協調して第2ステージ1040Aの位置をモニターする6つの干渉計システム1023A−1023Cを有する。 The components of the
図10Bにおいて、初期化システム1081Bはまた、干渉計システム1023A−1023Cが未稼動の際に、第2ステージ1040Aが正確な方位に調整されるようにする。この実施形態において、初期化システム1081Aは、1以上のアライナー1085A−1085Cを有し、それらは、第2ステージ1040Aのさらなる動きを抑制するものであり、第2ステージ1040Bが各稼動範囲内で回転されるように、位置決めされている。 In FIG. 10B, the
図10Bに示す実施形態において、初期化システム1081Bは、3つのアライナー1085A−1085C、すなわち、Zアライナー1085A、Xアライナー1085B、及びYアライナー1085Cを有する。この実施形態において、Zアライナー1085Aは、Z軸に沿った第2ステージ1040Bの動きを協調して抑制しかつ、X及びY軸周りに第2ステージ1040Bを方向付ける、離間した3つの硬質なZストップ体1087A(想像線で示される)を有する。Xアライナー1085Bは、X軸に沿って第2ステージ1040Bの動きを協調して抑制しかつ、Z軸周りに第2ステージ1040Bを方向付ける、離間した2つの硬質なXストップ体1087Bを有する。Yアライナー1085Bは、Y軸に沿って第2ステージ1040Bの動きを抑制する硬質なYストップ体1087Cを有する。また、例えば、初期化システム1081Bは、3未満あるいは3を超えるアライナーを有することもできる。例えば、X、Y、及びZ軸周りに関して、他のアライナー1085A,1085Bによって第2ステージ1040Bを適切に方向付けることが可能であるから、Yアライナー1085Cは、必ずしも必要でない。 In the embodiment shown in FIG. 10B, the
一実施形態において、1以上の硬質なストップ体1087A−1087Cは、アライメントの進行を妨げる摩擦を抑制するために、低摩擦材料又は回転要素(カムフォロアなど)から構成される接触領域1089を有する。 In one embodiment, the one or more
また、例えば、1以上の硬質なストップ体を、1以上のリミットスイッチ又は光学センサに置き換えることもできる。 For example, one or more hard stop bodies can be replaced with one or more limit switches or optical sensors.
図10Bにおいて、各ストップ体1087A−1087Cは、第1ステージ1038Bに取り付けられ、接触領域1089が第2ステージ1040Bに係わっている。また、例えば、1以上のストップ体1087A−1087Cは、他の構造体に取り付けられてもよい。例えば、1以上のストップ体1087A−1087Cが第2ステージ1040Bに固定され、接触領域1089が第1ステージ1038Bに係わってもよい。 In FIG. 10B, each
この構成において、ステージ装置1020Bが始動すると、初期化プロセスが開始し、制御システムが、位置情報なしでオープンループ方式で第2移動装置を制御する。この構成により、その初期位置から1軸に沿って(例えば、Z軸に沿って)、第2ステージ1040Aが個別のストップ体1087A−1087C(Zストップ体1087Aなど)に係わるまで、第2ステージ1040Aが徐々に移動するように、第2移動装置が制御される。次に、第2ステージ1040Aが次の軸に沿って(例えば、X軸に沿って)、第2ステージ1040Aが個別のストップ体1087A−1087C(Xストップ体1087Bなど)に係わるまで、第2ステージ1040Aが徐々に移動するように、第2移動装置が制御される。最後に、第2ステージが残りの軸に沿って(例えば、Y軸に沿って)、第2ステージ1040が個別のストップ体1087A−1087C(Yストップ体1087Cなど)に係わるまで、第2ステージ1040Aが徐々に移動するように、第2移動装置が制御される。 In this configuration, when the
第2ステージ1040Aがストップ体1087−1087Cに寄せられて一旦位置決めされると、干渉計システム1023A−1023Cが初期化される。その後、干渉計システム1023A−1023Cからの位置情報を用いて制御システムが第2移動装置を制御する。ここで、第2ステージ1040BがZストップ体1087Aに係わると、X及びY干渉計システム1023B,1023Cが初期化され、第2ステージ1040BがXストップ体1087Bに係わると、Z干渉計システム1023Aが初期される。 Once the
特定の構成において、第2移動装置における駆動機の起動は、第2ステージ1040Bの繰り返し可能なアライメントを作り出すシーケンスによって生じる。 In certain configurations, activation of the drive in the second mobile device is caused by a sequence that creates a repeatable alignment of the
図10Cは、本発明の特徴を有するステージ装置1020Cのさらに別の実施形態一部を、上から見た模式的な斜視図である。例えば、ステージ装置1020Cは、図1の露光装置10における、ウエハステージ装置20として、あるいはレチクルステージ装置18として用いることができる。また、ステージ装置1020Aは、他のタイプのデバイスを移動させるのに用いることができる。 FIG. 10C is a schematic perspective view of a part of still another embodiment of the
図10Cに示すステージ装置1020Cの構成要素は、第1ステージ1038Cと、第2ステージ1040Cと、測定システム1022Cと、初期化システム1081Cとを有する。ステージ1038C,1040C、及び測定システム1022Cは、対応する上述したデザインと同様のデザインにすることができる。図10Cにおいて、測定システム1022Cはまた、3軸に沿って及び3軸周りに関して、協調して第2ステージ1040Cの位置をモニターする6つの干渉計システム1023A−1023Cを有する。 The components of the
図10Cにおいて、初期化システム1081Cは、1以上の初期センサー1083A−1083C、及び1以上のアライナー1085Aの組み合わせを有する。 In FIG. 10C, the
図10Cに示す実施形態において、初期化システム1081Cは、6つの初期センサー1083A−1083C(想像線で示される)を有し、それらはすなわち、(i)Z軸に沿って及びX軸周り及びY軸周りに関して、第2ステージ1040Aの位置を協調して測定する離間した3つのZセンサー1083Aと、(ii)X軸に沿って及びZ軸周りに関して、第2ステージ1040Aの位置を協調して測定する離間した2つのXセンサー1083Bと、(iii)Y軸に沿って、第1ステージ1038Aに対する第2ステージ1040Aの位置を測定するYセンサー1083Cと、(iv)Z軸に沿った第2ステージ1040Bの動きを協調して抑制しかつ、X及びY軸周りに第2ステージ1040Bを方向付ける、Zストップ体1087Aを有するZアライナー1085A(想像線で示す)と、を有する。 In the embodiment shown in FIG. 10C, the
この実施形態において、各Zセンサー1083Aは、インクリメンタル型のセンサーであり、X及びYセンサー1083B,1083Cは、アブソリュート型のセンサーである。この実施形態において、1以上のZ測定器406(図4A及び9Aに示す)をZセンサー1083Aとして用いることもできる。 In this embodiment, each
この実施形態において、ステージ装置1020Bが始動すると、初期化プロセスが開始し、制御システムが、初期センサー1083A−1083Cからの位置情報を用いて第2移動装置を制御する。この構成により、その初期位置から1軸に沿って(例えば、Z軸に沿って)、第2ステージ1040Aが個別のストップ体1087A−1087C(Zストップ体1087Aなど)に係わるまで、第2ステージ1040Aが徐々に移動するように、第2移動装置が制御される。また、X及びY軸に沿って及びZ軸周りに、その初期位置から目標位置に向けて第2ステージ1040Aが徐々に移動するように、X及びYセンサー1083B,1083Cからの位置情報を用いて、第2移動装置が制御される。第2ステージ1040Aが正確な方位で一旦安定すると、干渉計システム1023A−1023Cが初期化される。その後、制御システムは、干渉計システム1023A−1023Cからの位置情報用いて第2移動装置を制御する。 In this embodiment, when
上述したように、Z減衰器410の剛性補償のためのZ測定器406(図4A及び9Aに示す)は、アブソリュート型のセンサー又はインクリメンタル型のセンサーとすることができる。1以上のZ測定器406がアブソリュート型のセンサーである場合、Z測定器406は、初期化システム1081A及び1081Cの初期センサーにおけるZセンサー1083Aとして用いることができる。 As described above, the Z measuring device 406 (shown in FIGS. 4A and 9A) for stiffness compensation of the
半導体デバイスは、図11Aに概略的に示すプロセスによって、上記のシステムを用いて製造される。ステップ1101において、デバイスの機能及び特性の設計が行われる。次に、ステップ1102において、前記設計ステップに従ったパターンを有するマスク(レチクル)が設計され、平行したステップ1103において、シリコン材料からウエハが製造される。ステップ1104において、本発明に係る上記のフォトリソグラフィシステムによって、ステップ1102で設計されたマスクパターンが、ステップ1103からのウエハ上に露光される。ステップ1105において、半導体デバイスが組み立てられ(ダイシング工程、ボンティング工程、及びパッケージング工程を含む)、最後に、ステップ1106においてデバイスが検査される。 A semiconductor device is manufactured using the system described above by the process schematically shown in FIG. 11A. In
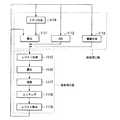
図11Bは、半導体デバイスの製造の場合における上記のステップ1104の詳細なフローの一例を示す。図11Bにおいて、ステップ1111(酸化ステップ)において、ウエハ表面が酸化する。ステップ111(CVDステップ)において、ウエハ表面に絶縁膜が形成される。ステップ1113(電極形成ステップ)において、蒸着によってウエハ上に電極が形成される。ステップ1114(イオン打込みステップ)において、ウエハにイオンが打ち込まれる。以上のステップ1111−1114は、ウエハ処理の各段階の前処理工程を構成しており、各段階において必要な処理に応じて選択される。 FIG. 11B shows an example of a detailed flow of the
ウエハプロセスの各段階において、上述の前処理工程が終了すると、以下のようにして後処理工程が実行される。後処理工程では、まず、ステップ1115(レジスト形成ステップ)において、ウエハに感光剤が塗布される。次に、ステップ1116(露光ステップ)において、上記の露光装置を用いて、マスク(レチクル)の回路パターンがウエハに転写される。続くステップ1117(現像ステップ)において、露光されたウエハが現像され、ステップ1118(エッチングステップ)において、レジストが残存している部分以外の部分(露光された材料表面)がエッチングにより取り除かれる。ステップ1119(フォトレジスト除去ステップ)において、エッチング後の不要な残りのレジストが取り除かれる。こうした前処理工程と後処理工程との繰り返しによって、多数の回路パターンが形成される。 At each stage of the wafer process, when the above pre-process is completed, the post-process is executed as follows. In the post-processing step, first, in step 1115 (resist formation step), a photosensitive agent is applied to the wafer. Next, in step 1116 (exposure step), the circuit pattern of the mask (reticle) is transferred to the wafer using the above exposure apparatus. In the following step 1117 (developing step), the exposed wafer is developed, and in step 1118 (etching step), portions other than the portions where the resist remains (exposed material surface) are removed by etching. In step 1119 (photoresist removal step), unnecessary residual resist after etching is removed. A large number of circuit patterns are formed by repeating the pre-processing step and the post-processing step.
本発明は、液体に適した測定器を用いることによって、液浸タイプの露光装置に適用可能である。例えば、国際公開第99/49504号は、露光プロセスにおいて基板(ウエハ)と投影レンズ系との隙間に液体を供給する露光装置を開示している。許容される範囲内で、国際公開第99/49504号の開示を援用して本文の記載の一部とする。 The present invention can be applied to an immersion type exposure apparatus by using a measuring device suitable for a liquid. For example, WO99 / 49504 discloses an exposure apparatus that supplies liquid to a gap between a substrate (wafer) and a projection lens system in an exposure process. To the extent permitted, the disclosure of WO 99/49504 is incorporated herein by reference.
また、本発明は、2以上の基板及び/又はレチクルステージを有する露光装置にも適用可能である。こうした装置では、露光のために他のステージが用いられている間に、平行して又は予備ステップに追加のステージが用いられる。こうしたマルチステージ露光装置は、例えば、特開平10−163099号公報、特開平10−214783号公報、及びこれらに対応する米国特許第6,341,007号、米国特許6,400,441号、米国特許6,549,269号、及び米国特許6,590、634号に記載されている。さらに、特表2000−505958号公報及びこれに対応する米国特許5,969,441号、また、米国特許第6,208,407号にも開示されている。許容される範囲内で、上記の米国特許及び日本国特許出願の開示を援用して本文の記載の一部とする。 The present invention can also be applied to an exposure apparatus having two or more substrates and / or reticle stages. In such an apparatus, additional stages are used in parallel or in a preliminary step while other stages are used for exposure. Such a multi-stage exposure apparatus is disclosed in, for example, Japanese Patent Laid-Open Nos. 10-163099, 10-214783, and corresponding US Pat. No. 6,341,007, US Pat. No. 6,400,441, US No. 6,549,269 and US Pat. No. 6,590,634. Further, it is also disclosed in JP 2000-505958 A and US Pat. No. 5,969,441 corresponding thereto and US Pat. No. 6,208,407. To the extent permitted, the disclosures of the above US patents and Japanese patent applications are incorporated herein by reference.
本発明は、特表11−135400号に記載されているように、露光のための基板(ウエハ)を保持して移動可能なステージと、各種のセンサや測定ツールを有する計測ステージとを備えた露光装置にも適用可能である。許容される範囲内で、上記の日本国特許出願の開示を援用して本文の記載の一部とする。 As described in JP-A-11-135400, the present invention includes a stage capable of holding and moving a substrate (wafer) for exposure, and a measurement stage having various sensors and measurement tools. The present invention can also be applied to an exposure apparatus. To the extent permitted, the disclosure of the above Japanese patent application is incorporated into the description of the text.
なお、上述した詳細な説明において開示した内容は、本発明の好ましい実施形態の一例であって、本発明は、ここで示した構成やデザインの詳細に限定されることはなく、添付のクレームの記載によってのみ限定される。 The contents disclosed in the detailed description above are examples of preferred embodiments of the present invention, and the present invention is not limited to the details of the configuration and design shown here, and the appended claims Limited only by description.
10…露光装置、12…装置フレーム、14…照明系、16…光学機器、18…レチクルステージ装置、20…ウエハステージ装置、22…測定システム、24…制御システム、26…レチクル、30…搭載ベース、32…光源、34…照明光学機器、200…ワークピース、220…ステージ装置、224…制御システム、236…ステージベース、238…第1ステージ、240…第2ステージ、242…第1移動装置、244…第2移動装置、246L…左X粗動機、246R…右X粗動機、246Y…Y粗動機、248…ガイドバー、250A…第1粗動用部品、250B…第2粗動用部品、251A…下方支持体、251B…上方支持体、251C…ステージフレーム、252F…第1X駆動機、252S…第2X駆動機、254F…第1Y駆動機、254S…第2Y駆動機、255…Z駆動機、256A…第1駆動用部品、256B…第2駆動用部品、257…ステージベアリング装置、258…隙間、360X…Xミラー、360Y…Yミラー、360A…結合領域、360S…スロット、360F…締め具、362…テーブル、364…チャック、366A…第1ネック状領域、366B…第1取付面、366C…第1表面長さ、368A…駆動ハウジング、368B…磁石アレイ、368C…取付ブラケット、368D…駆動側取付面、368E…ハウジング長さ、368F…駆動側取付面、368G…ブラケット長さ、370A…質量補償器、370B…ストップ体、372A…第2ネック状領域、372B…第2取付面、372C…第2表面長さ、373A…第1締結器、373B…第2締結器、373C…締め具、374A…テーブルパッド、374B…支持面、376…溝、376B…磁石、378A…第1テーブルセクション、378B…第2テーブルセクション、378C…第3テーブルセクション、380A…上板、380B…中間板、380C…中間壁、380D…下板、380E…下壁、382A−D…壁、384A−D…壁、386…開口、400…Z出力部、402…Zフレーム、404…Zベアリング、406…Z測定器、408…Zレバー、410…Z減衰器、412…Zハウジング、414…ハウジング支持体、416…Z移動体、418…接続部、420…平らな頂部、422…円筒部、424…支持面、426A…上方バーセクション、426B…下方バーセクション、426C…中間バーセクション、426D…後方バーセクション、426…開口、426F…スロット、428…着脱部、430A…外側マグネット、430B…内側マグネット、432A…コイル、432B…脚部、433…磁化方向、434A…上方領域、434B…下方領域、640…第2ステージ、644…第2移動装置、652F…第1X駆動機、652S…第2X駆動機、654F…第1Y駆動機、654S…第2Y駆動機、656A…第1駆動用部品、656B…第2駆動用部品、740…第2ステージ、744…第2移動装置、752F…X駆動機、753F…X駆動機、754F…Y駆動機、755F…Y駆動機、755S…Y駆動機、800…ワークピース、811…流体源、813…入口ポート、815…ステージ通路、816…Z移動体、817…出力ポート、840…第2ステージ、855…Z駆動機、857…ステージベアリング装置、862…テーブル、864…チャック、874A…テーブルパッド、921…インプット、923…位置決めシステム、925…補償システム、931…剛性、933…補償剛性、1020A…ステージ装置、1020B…ステージ装置、1020C…ステージ装置、1022A…測定システム、1022B…測定システム、1022C…測定システム、1023A…Z干渉計システム、1023B…X干渉計システム、1023C…Y干渉計システム、1025A…第1干渉計部品、1025B…第2干渉計部品、1027…ビーム、1038A…第1ステージ、1038B…第1ステージ、1038C…第1ステージ、1040A…第2ステージ、1040B…第2ステージ、1040C…第2ステージ、1081A…初期化システム、1081B…初期化システム、1081C…初期化システム、1083A…Zセンサー、1083B…Xセンサー、1083C…Yセンサー、1085A…Zアライナー、1085B…Xアライナー、1085C…Yアライナー、1087A…Zストップ体、1087B…Xストップ体、1087C…Yストップ体、1089…接触領域。 DESCRIPTION OF
Claims (11)
Translated fromJapanese第1部材と、
前記第1軸に沿って前記第1部材を移動させる第1移動装置と、
前記物体を保持する第2部材と、
前記第1軸、前記第2軸及び前記第3軸に沿って、前記第1部材に対して前記第2部材を移動させる第2移動装置と、
前記第1部材に設けられて、前記第2部材を、該第2部材が前記第1部材に対して前記第1軸及び前記第2軸に沿った方向に移動可能に支持するベアリング部材と、を有し、
前記第2移動装置は、コイル部材と該コイル部材と協働して前記第2部材を前記第1部材に対して前記第3軸に沿って移動させる駆動力を発生させる磁性部材とを有し、前記コイル部材と前記磁性部材とが前記第1部材に設けられていることを特徴とするステージ装置。A stage device that moves an object along a first axis, a second axis, and a third axis that intersect each other,
A first member;
A first moving device for moving the first member along the first axis;
A second member for holding the object;
A second moving device that moves the second member relative to the first member along the first axis, the second axis, and the third axis;
A bearing member that is provided on the first member and supports the second member so that the second member can move in a direction along the first axis and the second axis with respect to the first member; Have
The second moving device includes a coil member and a magnetic member that cooperates with the coil member to generate a driving force for moving the second member along the third axis with respect to the first member. The stage member, wherein the coil member and the magnetic member are provided on the first member.
前記ベアリング部材は、前記Z駆動機に対して前記第2部材を支持する請求項1から3のうちのいずれか一項に記載のステージ装置。The second moving device has a Z drive that moves the second member relative to the first member in a direction along the third axis,
The stage device according to claim 1, wherein the bearing member supports the second member with respect to the Z drive machine.
前記ベアリング部材は、前記Z移動体に対して前記第2部材を支持する請求項4に記載のステージ装置。The Z drive has a Z housing, a Z moving body, and a connecting portion that allows the Z moving body to tilt with respect to the Z housing,
The stage device according to claim 4, wherein the bearing member supports the second member with respect to the Z moving body.
前記ベアリング部材は、前記Z駆動機に対して前記第2部材を支持する請求項1から3のうちのいずれか一項に記載のステージ装置。The second moving device moves the second member relative to the first member in a direction along the third axis, a direction around the first axis, and a direction around the second axis. Having two spaced Z drives,
The stage device according to claim 1, wherein the bearing member supports the second member with respect to the Z drive machine.
前記ベアリング部材は、前記Z移動体に対して前記第2部材を支持する請求項6に記載のステージ装置。Each of the Z drives allows a Z housing, a Z moving body, and the Z moving body to move relative to the Z housing in a direction around the first axis and a direction around the second axis. Having a connection part,
The stage device according to claim 6, wherein the bearing member supports the second member with respect to the Z moving body.
前記第1駆動機および前記第2駆動機は、第1駆動用部品と、前記第1駆動用部品と相互作用して動きを起こす第2駆動用部品とを有し、
前記第1及び第2駆動機の前記第1駆動用部品が前記第1部材に連結され、前記第1及び第2駆動機の前記第2駆動用部品が前記第2部材に連結されている請求項1から7のうちのいずれか一項に記載のステージ装置。The second moving device includes a first driving device that moves the second member in a direction along the first axis, and a second driving device that moves the second member in a direction along the second axis. Have
The first drive unit and the second drive unit have a first drive component and a second drive component that interacts with the first drive component to cause movement,
The first driving component of the first and second driving machines is coupled to the first member, and the second driving component of the first and second driving machines is coupled to the second member. Item 8. The stage device according to any one of Items 1 to 7.
Applications Claiming Priority (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US62438504P | 2004-11-02 | 2004-11-02 | |
| US60/624,385 | 2004-11-02 | ||
| US62569904P | 2004-11-04 | 2004-11-04 | |
| US60/625,699 | 2004-11-04 | ||
| US64790105P | 2005-01-28 | 2005-01-28 | |
| US60/647,901 | 2005-01-28 | ||
| US11/048,405 | 2005-01-31 | ||
| US11/048,405US7869000B2 (en) | 2004-11-02 | 2005-01-31 | Stage assembly with lightweight fine stage and low transmissibility |
| US11/258,249 | 2005-10-24 | ||
| US11/258,249US7417714B2 (en) | 2004-11-02 | 2005-10-24 | Stage assembly with measurement system initialization, vibration compensation, low transmissibility, and lightweight fine stage |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005318689ADivisionJP4807040B2 (en) | 2004-11-02 | 2005-11-01 | Stage device with measurement system, initialization, vibration compensation, low propagation, and lightweight precision stage |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014054205ADivisionJP5817873B2 (en) | 2004-11-02 | 2014-03-17 | Stage apparatus, exposure apparatus, and device manufacturing method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011199317Atrue JP2011199317A (en) | 2011-10-06 |
Family
ID=44877043
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011142126APendingJP2011199317A (en) | 2004-11-02 | 2011-06-27 | Stage equipment and exposure device, and method of manufacturing device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011199317A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101398990B1 (en)* | 2012-05-22 | 2014-05-27 | 주식회사 두리엔 | Clamp for auto-adjusting origin position |
| JP2014160832A (en)* | 2004-11-02 | 2014-09-04 | Nikon Corp | Stage device, exposure device, and method for manufacturing device |
| JP2015198121A (en)* | 2014-03-31 | 2015-11-09 | キヤノン株式会社 | Lithography apparatus, stage device, and method of manufacturing article |
| JP2015535615A (en)* | 2012-11-12 | 2015-12-14 | 株式会社ニコン | Exposure apparatus, exposure method, and device manufacturing method |
| CN115841936A (en)* | 2023-02-16 | 2023-03-24 | 上海隐冠半导体技术有限公司 | Limiting device for motion platform, motion platform and electron beam detection device |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10116120A (en)* | 1996-10-09 | 1998-05-06 | Canon Inc | Fine movement positioning control device |
| JP2003256050A (en)* | 2002-02-26 | 2003-09-10 | Canon Inc | Vibration control apparatus, vibration control method, exposure apparatus and device manufacturing method |
| JP2003303753A (en)* | 2002-04-08 | 2003-10-24 | Canon Inc | Moving positioning apparatus and exposure apparatus having the same |
| JP2008519456A (en)* | 2004-11-04 | 2008-06-05 | 株式会社ニコン | Z support device for precision stage |
| JP4807040B2 (en)* | 2004-11-02 | 2011-11-02 | 株式会社ニコン | Stage device with measurement system, initialization, vibration compensation, low propagation, and lightweight precision stage |
- 2011
- 2011-06-27JPJP2011142126Apatent/JP2011199317A/enactivePending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10116120A (en)* | 1996-10-09 | 1998-05-06 | Canon Inc | Fine movement positioning control device |
| JP2003256050A (en)* | 2002-02-26 | 2003-09-10 | Canon Inc | Vibration control apparatus, vibration control method, exposure apparatus and device manufacturing method |
| JP2003303753A (en)* | 2002-04-08 | 2003-10-24 | Canon Inc | Moving positioning apparatus and exposure apparatus having the same |
| JP4807040B2 (en)* | 2004-11-02 | 2011-11-02 | 株式会社ニコン | Stage device with measurement system, initialization, vibration compensation, low propagation, and lightweight precision stage |
| JP2008519456A (en)* | 2004-11-04 | 2008-06-05 | 株式会社ニコン | Z support device for precision stage |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014160832A (en)* | 2004-11-02 | 2014-09-04 | Nikon Corp | Stage device, exposure device, and method for manufacturing device |
| KR101398990B1 (en)* | 2012-05-22 | 2014-05-27 | 주식회사 두리엔 | Clamp for auto-adjusting origin position |
| JP2015535615A (en)* | 2012-11-12 | 2015-12-14 | 株式会社ニコン | Exposure apparatus, exposure method, and device manufacturing method |
| US9772564B2 (en) | 2012-11-12 | 2017-09-26 | Nikon Corporation | Exposure apparatus and exposure method, and device manufacturing method |
| JP2015198121A (en)* | 2014-03-31 | 2015-11-09 | キヤノン株式会社 | Lithography apparatus, stage device, and method of manufacturing article |
| CN115841936A (en)* | 2023-02-16 | 2023-03-24 | 上海隐冠半导体技术有限公司 | Limiting device for motion platform, motion platform and electron beam detection device |
| CN115841936B (en)* | 2023-02-16 | 2023-04-25 | 上海隐冠半导体技术有限公司 | Limiting device for moving platform, moving platform and electron beam detection device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5817873B2 (en) | Stage apparatus, exposure apparatus, and device manufacturing method | |
| US8767172B2 (en) | Projection optical device and exposure apparatus | |
| US20040017167A1 (en) | Vibration control device, stage device and exposure apparatus | |
| US6523695B1 (en) | Method and apparatus for operating a vibration isolation system having electronic and pneumatic control systems | |
| US20010020684A1 (en) | Reaction force isolation system | |
| US6987558B2 (en) | Reaction mass for a stage device | |
| JP6718154B2 (en) | MOVING APPARATUS, EXPOSURE APPARATUS, AND DEVICE MANUFACTURING METHOD | |
| US6958808B2 (en) | System and method for resetting a reaction mass assembly of a stage assembly | |
| US6590639B1 (en) | Active vibration isolation system having pressure control | |
| US20020109823A1 (en) | Wafer stage assembly | |
| WO2006022200A1 (en) | Stage apparatus and exposure apparatus | |
| JP2008519456A (en) | Z support device for precision stage | |
| JP2011199317A (en) | Stage equipment and exposure device, and method of manufacturing device | |
| JP2006253572A (en) | Stage apparatus, exposure apparatus, and device manufacturing method | |
| US6686991B1 (en) | Wafer stage assembly, servo control system, and method for operating the same | |
| JP2004193425A (en) | Movement control method and apparatus, exposure apparatus, and device manufacturing method | |
| JP2001023894A (en) | Stage device and exposure device | |
| US20040004703A1 (en) | Method and apparatus for reducing rotary stiffness in a support mechanism | |
| US20040145751A1 (en) | Square wafer chuck with mirror | |
| JP2001023896A (en) | Stage device and exposure device | |
| US20070115451A1 (en) | Lithographic System with Separated Isolation Structures | |
| JP2002175963A (en) | Stage apparatus, position control method thereof, exposure apparatus and exposure method | |
| JP2001345256A (en) | Stage equipment and exposure equipment | |
| JP2004241670A (en) | Assembly structure, stage device and exposure apparatus | |
| US20060104753A1 (en) | Stage assembly with lightweight fine stage and low transmissibility |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20120823 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20130410 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20130416 | |
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20130613 | |
| A02 | Decision of refusal | Free format text:JAPANESE INTERMEDIATE CODE: A02 Effective date:20131217 | |
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20140317 |