JP2009189702A - Endoscopic treatment instrument device - Google Patents
Endoscopic treatment instrument deviceDownload PDFInfo
- Publication number
- JP2009189702A JP2009189702AJP2008035893AJP2008035893AJP2009189702AJP 2009189702 AJP2009189702 AJP 2009189702AJP 2008035893 AJP2008035893 AJP 2008035893AJP 2008035893 AJP2008035893 AJP 2008035893AJP 2009189702 AJP2009189702 AJP 2009189702A
- Authority
- JP
- Japan
- Prior art keywords
- treatment
- bending
- wire
- endoscope
- distal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Landscapes
- Surgical Instruments (AREA)
Abstract
Translated fromJapaneseDescription
Translated fromJapanese本発明は、内視鏡の処置具挿通チャンネルに対して挿通される処置具装置に関する。 The present invention relates to a treatment instrument device that is inserted into a treatment instrument insertion channel of an endoscope.
内視鏡用の処置具は、可撓性を有する挿入部の先端に、把持鉗子や高周波スネアのような各種の処置を行う先端処置部が設けられており、内視鏡や付加的な案内具に形成された処置具挿通チャンネルに挿入部を挿通させ、この処置具挿通チャンネルから先端処置部を突出させて使用される。処置具の使用時にターゲットに対して先端処置部を位置合わせさせるための位置調整手段として、挿入部をその長手方向軸に対して湾曲させる湾曲操作機構が知られている。湾曲操作機構は、内視鏡本体に設けられたもの、特許文献1のように処置具の挿入部自体に設けられたもの、特許文献2のように処置具を挿通させる付加的な案内具に設けられたものなどが知られており、これらの湾曲操作機構による湾曲操作で先端処置部の向く方向を変化させることができる。
処置具においてはさらに、挿入部の長手方向軸を中心とした回転方向における先端処置部の角度位置についても設定を要する場合がある。特に、鉗子類は特定の動作平面内で開閉動作を行う構造であるため、湾曲操作機構によって挿入部の向きを変えた場合に、その操作平面が意図しない角度位置になる可能性がある。このような場合、先端処置部の回転方向位置の調整には、処置具装置全体を軸回りに回転させるなどしており、操作性の改善が望まれていた。 In the treatment instrument, it may be necessary to set the angular position of the distal treatment section in the rotation direction around the longitudinal axis of the insertion section. In particular, since the forceps have a structure that opens and closes within a specific operation plane, when the orientation of the insertion portion is changed by the bending operation mechanism, the operation plane may be at an unintended angular position. In such a case, in order to adjust the rotational position of the distal treatment section, the entire treatment instrument device is rotated about the axis, and improvement in operability has been desired.
また、先端処置部を操作するための操作部と、湾曲操作を行うための操作部の配置によっては、それぞれの操作部を操作しづらい場合があり、この点での操作性の改善も望まれている。 In addition, depending on the arrangement of the operation unit for operating the distal treatment unit and the operation unit for performing the bending operation, it may be difficult to operate each operation unit, and improvement in operability in this respect is also desired. ing.
本発明は以上の問題点に鑑みてなされたものであり、先端処置部の回転方向の位置調整を容易に行うことができ、操作性に優れた内視鏡用処置具装置を提供することを目的とする。本発明はまた、先端処置部に対する操作と湾曲操作のいずれにも優れた操作性を発揮する内視鏡用処置具装置を提供することを目的とする。 The present invention has been made in view of the above problems, and it is possible to easily adjust the position of the distal treatment section in the rotational direction, and to provide an endoscopic treatment instrument device excellent in operability. Objective. Another object of the present invention is to provide an endoscopic treatment instrument device that exhibits excellent operability for both the operation on the distal treatment section and the bending operation.
本発明は、可撓性を有する挿入部の先端に設けられ、挿入対象内での処置を行う先端処置部と、挿入部内に挿通されて先端処置部に接続する処置部操作ワイヤとを有する内視鏡用処置具において、挿入部先端の回転受け部に対して、先端処置部を挿入部の長手方向軸を中心として回転自在に支持させ、処置部操作ワイヤに対して、挿入部の長手方向への進退移動と挿入部の長手方向軸を中心とする回転とを選択して与え、この処置部操作ワイヤの回転によって先端処置部に回転動作を行わせる操作手段を備えたことを特徴としている。 The present invention includes an end treatment portion that is provided at the distal end of a flexible insertion portion and performs a treatment within an insertion target, and a treatment portion operation wire that is inserted into the insertion portion and connected to the distal treatment portion. In the endoscope treatment instrument, the distal treatment portion is supported rotatably about the longitudinal axis of the insertion portion with respect to the rotation receiving portion at the distal end of the insertion portion, and the longitudinal direction of the insertion portion with respect to the treatment portion operation wire It is characterized by comprising operating means for selecting and giving a forward / backward movement to and a rotation about the longitudinal axis of the insertion portion, and causing the distal treatment portion to perform a rotating operation by the rotation of the treatment portion operation wire. .
本発明では、挿入部先端に取り付ける先端処置部は様々なタイプとすることが可能であり、先端処置部の形態に応じて、回転受け部による支持構造を異ならせることができる。例えば、回転受け部には、挿入部の先端側に開口された円形孔を形成し、該円形孔の内周面の一部に内径サイズを大きくした環状溝を形成する一方、先端処置部側には、回転受け部の円形孔に相対回転自在に嵌る円筒部と、この円筒部の外面に支持され、回転受け部の環状溝に弾性的に係合して円形孔から先端処置部を抜け止めさせる弾性環状体とを設けた構成にすることができる。 In the present invention, the distal treatment section attached to the distal end of the insertion section can be of various types, and the support structure by the rotation receiving section can be varied according to the form of the distal treatment section. For example, a circular hole opened on the distal end side of the insertion portion is formed in the rotation receiving portion, and an annular groove having a larger inner diameter is formed on a part of the inner peripheral surface of the circular hole, while the distal treatment portion side Includes a cylindrical portion that is rotatably fitted in a circular hole of the rotation receiving portion, and is supported by an outer surface of the cylindrical portion, and elastically engages with an annular groove of the rotation receiving portion to exit the distal treatment portion from the circular hole. An elastic annular body to be stopped can be provided.
あるいは、回転受け部に挿入部の先端側に開口された円形孔を形成する一方、先端処置部が、回転受け部の円形孔内に挿入されて処置部操作ワイヤに接続するワイヤ接続端部と、このワイヤ接続端部から延設され円形孔から外方に突出し、この円形孔の開口縁部との接触によって開度が規制されるループワイヤ部とを有するように構成することも可能である。この場合、回転受け部の円形孔の開口縁部が、挿入部の先端側に進むにつれて徐々に開口径を大きくする部分円錐状のテーパ内周面となっていることが好ましい。 Or, while forming a circular hole opened on the distal end side of the insertion part in the rotation receiving part, the distal treatment part is inserted into the circular hole of the rotation receiving part and connected to the treatment part operation wire; It is also possible to have a loop wire portion that extends from the wire connection end portion, protrudes outward from the circular hole, and whose opening degree is regulated by contact with the opening edge of the circular hole. . In this case, it is preferable that the opening edge portion of the circular hole of the rotation receiving portion has a partially conical tapered inner peripheral surface in which the opening diameter gradually increases as it advances toward the distal end side of the insertion portion.
回転受け部は金属材料で形成することが好ましい。金属製にすることで、高周波電流を流すタイプの先端処置部を用いたとき、火花による焼け焦げを防ぐことができる。また、先端処置部が回転受け部に対して摺接するときの耐摩耗性も向上させることができる。安全性の観点から、金属製の回転受け部の外側は、絶縁性チューブで覆われることが望ましい。また、挿通部の長手方向に沿って配設されて処置部操作ワイヤを摺動自在に挿通させるワイヤガイド部材を有し、金属製の回転受け部の後部に、絶縁材からなりワイヤガイド部材の端部が接続固定されるワイヤガイド固定部材が固定されることが好ましい。この絶縁性を有するワイヤガイド固定部材を介在させることによって、回転受け部よりも後方に位置する挿入部内の他の金属部材へ電流が流れるのを防ぐことができる。 The rotation receiving part is preferably formed of a metal material. By using a metal, it is possible to prevent scorching due to sparks when a high-frequency current-type distal treatment section is used. Further, the wear resistance when the distal treatment portion is in sliding contact with the rotation receiving portion can be improved. From the viewpoint of safety, it is desirable that the outside of the metal rotation receiving portion is covered with an insulating tube. In addition, a wire guide member that is disposed along the longitudinal direction of the insertion portion and allows the treatment portion operation wire to be slidably inserted therethrough is formed of an insulating material at the rear portion of the metal rotation receiving portion. It is preferable that the wire guide fixing member whose end is connected and fixed is fixed. By interposing this wire guide fixing member having an insulating property, it is possible to prevent current from flowing to other metal members in the insertion portion located behind the rotation receiving portion.
回転受け部とワイヤガイドの固定手段は任意に選択できるが、例えば、回転受け部とワイヤガイドの一方と他方に、挿入部の長手方向軸を中心とする環状をなし互いに嵌合する環状凹部と環状凸部を形成し、この環状凹部と環状凸部の対向周面上に形成した係合爪と爪係合凹部の係合によって回転受け部とワイヤガイドを一体化させるとよい。 The fixing means for the rotation receiving portion and the wire guide can be arbitrarily selected. For example, one of the rotation receiving portion and the wire guide is formed with an annular recess centered on the longitudinal axis of the insertion portion and fitted to each other. An annular protrusion is formed, and the rotation receiving portion and the wire guide may be integrated by engagement of an engagement claw and a claw engagement recess formed on the circumferential surface of the annular recess and the annular protrusion.
本発明の内視鏡用処置具では、挿入部の基端部が接続する保持部から該挿入部とは反対方向に突出し、この突出方向への進退操作と、突出方向を向く軸線を中心とした回転操作とが可能に支持された操作ハンドルを設け、この操作ハンドルに処置部操作ワイヤが接続されるように構成するとよい。 In the endoscope treatment tool of the present invention, the proximal end portion of the insertion portion protrudes in a direction opposite to the insertion portion, and the advancement / retraction operation in the protrusion direction and the axis line facing the protrusion direction are the center. It is preferable that an operation handle supported so as to be able to perform the rotation operation is provided, and a treatment portion operation wire is connected to the operation handle.
より具体的には、保持部には、絶縁体からなる保持部外観部材と、この保持部外観部材を貫通して支持され、保持部の内側でワイヤガイド部材の端部を接続固定させ、保持部の外側に操作ハンドルを接続させる連結口金を支持した中継環とを備え、処置部操作ワイヤは、この中継環を貫通して保持部外方に延出されて操作ハンドルに接続されるように構成するとよい。 More specifically, the holding portion is supported by penetrating the holding portion appearance member made of an insulator and the holding portion appearance member, and the end portion of the wire guide member is connected and fixed inside the holding portion. A relay ring that supports a coupling base for connecting the operation handle to the outside of the unit, and the treatment unit operation wire extends through the relay ring to the outside of the holding unit and is connected to the operation handle. Configure.
本発明の内視鏡用処置具ではさらに、挿入部の先端付近の一部を、該挿入部の長手方向軸に対して湾曲動作が可能な湾曲部とし、保持部から、挿入部と操作ハンドルを結ぶ保持部軸線と略直交する方向に向けて、湾曲部を湾曲操作するための湾曲操作グリップを突設させることが好ましい。この保持部からの湾曲操作グリップの突設方向は、湾曲部の複数の湾曲方向のいずれかと略一致していると、なお良い。 In the endoscope treatment tool of the present invention, a portion near the distal end of the insertion portion is a bending portion capable of bending with respect to the longitudinal axis of the insertion portion, and the insertion portion and the operation handle are moved from the holding portion. It is preferable to project a bending operation grip for bending the bending portion in a direction substantially orthogonal to the holding portion axis connecting the two. It is more preferable that the projecting direction of the bending operation grip from the holding portion substantially coincides with one of the plurality of bending directions of the bending portion.
また、保持部に対して湾曲操作グリップを、その突出方向の軸線を中心とする回転方向に角度調整可能に支持する角度調整支持機構を備えると、さらに操作性を向上させることができる。 Further, the operability can be further improved by providing an angle adjustment support mechanism that supports the bending operation grip with respect to the holding portion so that the angle of the bending operation grip can be adjusted in the rotation direction around the axis of the protruding direction.
湾曲操作グリップには、同軸で回動可能な2つの湾曲操作部材を備え、一方の湾曲操作部材と他方の湾曲操作部材を回動操作したときに、上記湾曲部が互いに略直交する方向へ湾曲動作されるように構成するとよい。 The bending operation grip is provided with two bending operation members that can rotate coaxially, and when the one bending operation member and the other bending operation member are rotated, the bending portions are bent in directions substantially orthogonal to each other. It may be configured to be operated.
以上の本発明の内視鏡用処置具装置によれば、操作手段の手元操作によって先端処置部の回転方向の位置調整を容易に行うことが可能で、操作性に優れた内視鏡用処置具装置が得られる。また、以上のような構造の操作ハンドルと湾曲操作グリップによると、先端処置部に対する操作と湾曲操作の両方の操作性を高めることができる。 According to the endoscopic treatment instrument device of the present invention described above, it is possible to easily adjust the position of the distal treatment section in the rotation direction by hand operation of the operating means, and the endoscopic treatment having excellent operability. A device is obtained. Further, according to the operation handle and the bending operation grip having the above-described structure, the operability of both the operation and the bending operation on the distal treatment section can be improved.
図1は、本発明を適用した内視鏡用処置具装置10の全体構造を示している。内視鏡用処置具装置10は、内視鏡の処置具挿通チャンネル、もしくは内視鏡に対して付加的に取り付けられる案内具の処置具挿通チャンネルに対して挿入可能な挿入部11を有し、この挿入部11の基部が筒状の保持部12に接続している。挿入部11は、先端処置部13、湾曲部14及び可撓管部15からなっており、保持部12における挿入部11と反対側の後端部には、先端処置部13を操作するための処置部操作ハンドル16が設けられている。また、保持部12における中間部には、挿入部11と処置部操作ハンドル16を結ぶ保持部12の軸線方向に対して略直交する方向に向けて湾曲操作グリップ17が突設されている。以降の説明において、挿入部11における軸線方向とは、その長手方向を意味し、図1のように挿入部11を直線状に伸ばした場合には、挿入部11の軸線と保持部12の軸線がほぼ一致する。 FIG. 1 shows the overall structure of an endoscope
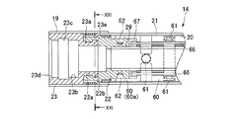
図4及び図5は、先端処置部13付近を拡大して一部を断面として示した図である。湾曲部14は、網状管20の外側を絶縁体からなる被覆チューブ21で覆った構造をなし、その先端部に先端硬性部材が設けられている。先端硬性部材は、合成樹脂製のワイヤガイド固定部材22と、金属製の枠受け環(回転受け部)23からなっている。ワイヤガイド固定部材22の前端部には環状凹部22aが形成され、この環状凹部22aに対して枠受け環23に形成した環状凸部23aが挿入され、環状凸部23aと環状凹部22aの間が接着で固定されて一体化された先端硬性部材となっている。枠受け環23の外側は絶縁チューブ19で覆われている。絶縁チューブ19は熱収縮性チューブからなり、枠受け環23に加えて湾曲部14側の被覆チューブ21の先端付近も覆っている。 4 and 5 are enlarged views of the vicinity of the
枠受け環23は、環状凸部23aより前方に、該環状凸部23aよりも内径サイズを大きくした円形の枠支持孔(円形孔)23bが形成され、枠支持孔23bの軸線方向の中間位置に、枠支持孔23bよりも内径サイズの大きい環状のリング嵌合溝(環状溝)23cが形成されている。枠支持孔23bの開口縁部は、挿入部11の先端側に進むにつれて徐々に開口径を大きくする部分円錐状のテーパ内周面23dとなっている。枠支持孔23bに対して、先端処置部13を構成する回転自在枠24の後端円筒部(円筒部)24aが相対回転可能に挿入される。後端円筒部24aの外周面には、半径方向に弾性的に拡縮変形可能なスナップリング(弾性環状体)25が支持されており、後端円筒部24aを枠支持孔23bに挿入すると、スナップリング25が内径方向に縮径された状態でリング嵌合溝23cに弾性的に嵌合して、枠受け環23に対して回転自在枠24が軸線方向の移動が規制された状態で抜け止め保持される。このスナップリング25を介した保持状態で、回転自在枠24は、枠受け環23に対して軸線を中心とする回転動作が許容される。 The
回転自在枠24を枠受け環23に取り付けた状態で、ワイヤガイド固定部材22、枠受け環23及び回転自在枠24の内部には、略面一な円筒状内周面の進退ガイド孔26が形成される。この進退ガイド孔26に対してスライド部材27が摺動自在に支持されている。スライド部材27には、処置具操作ワイヤ28のワイヤ先端部28aが接続されている。スライド部材27に対してワイヤ先端部28aは、ロウ付け、ハンダ付け、かしめ等の手段によって固定されている。処置具操作ワイヤ28は、先端部がワイヤガイド固定部材22に固定されたガイドチューブ(ワイヤガイド部材)29内に、挿入部11の長手方向への進退と該長手方向の軸線を中心とする相対回転のいずれも可能に挿通されている。ガイドチューブ29は、四フッ化エチレン樹脂(PTFE)、ポリエチレン、ポリアミド、ポリウレタンなどの絶縁性及び可撓性を有する材質からなり、挿入部11内を貫通して保持部12の後端部付近まで延設されている。ガイドチューブ29内に挿入された処置具操作ワイヤ28の後端は補強パイプ44に固定され、補強パイプ44が保持部12の後端部から後方に突出して、固定用端部材46を介して処置部操作ハンドル16に接続している。この処置部操作ハンドル16と固定用端部材46の接続構造については後述する。そして、処置部操作ハンドル16を介して処置具操作ワイヤ28、補強パイプ44及び固定用端部材46を挿入部11の長手方向に押し引きすることで、進退ガイド孔26内でスライド部材27を軸線方向に進退移動させることができる。 With the
回転自在枠24より先の先端処置部13は、スナップリング25とリング嵌合溝23cによる弾性係合力を超える大きさで引き抜くことにより、取り外しが可能であり、用途に応じた様々な処置具に交換することができる。図1から図6に表されている先端処置部13は把持鉗子であり、その概略構造は次の通りである。回転自在枠24は、後端円筒部24aから前方に向けて、互いに対向する一対のベース板部24b、24cを延設させている。図5に示すように、スライド部材27の先端部はベース板部24b、24cの間に挿入されており、このスライド部材27の先端部を挟むようにして、リンク支持軸30を介して一対のリンク31、32の基端部がそれぞれ回動自在に支持されている。リンク支持軸30は回転自在枠24に対して固定されておらず、スライド部材27の進退方向に位置を変化させることができる。各リンク31、32の先端部にはそれぞれ、連結軸33、34を介して一対の鉗子部材35、36の基端部が回動自在に支持されている。鉗子部材35と鉗子部材36はさらに、連結軸33、34による連結位置よりも若干先端寄りに位置する軸着部37、38で、回転自在枠24(ベース板部24b、24c)に固定した開閉回動軸39によって相対回動自在に支持されている。回転自在枠24においてベース板部24b、24cの両側部は開放されており、図4に示すようにリンク31やリンク32を側方へ突出させることが可能となっている。 The
一対の鉗子部材35、36はそれぞれ、軸着部37、38から先端側に向けて直線状の腕部35a、36aを延出させており、この腕部35a、36aの先端に、互いに噛合可能な鋸歯状の対向面が形成された噛合部35b、36bを有している。 The pair of
以上の先端処置部13(把持鉗子)は、処置具操作ワイヤ28を介して図4及び図5の右手方向にスライド部材27を移動させると、リンク支持軸30と開閉回動軸39の軸位置間隔が増大し、該リンク支持軸30を回動中心として、連結軸33と連結軸34を互いに接近させるようにリンク31、32が回動する。すると、連結軸33と連結軸34の位置変化に応じて、一対の鉗子部材35、36は、それぞれの先端の噛合部35b、36bを接近させる閉じ方向に開閉回動軸39を中心として相対回動する。図4は、スライド部材27が図中右手方向に最大に移動されて、鉗子部材35、36が閉じられた状態を示している。このとき、噛合部35b、36bの対向面が噛み合っている。一方、処置具操作ワイヤ28を介して図4及び図5の左手方向にスライド部材27を移動させると、リンク支持軸30が開閉回動軸39に接近し、該リンク支持軸30を回動中心として、連結軸33と連結軸34を互いに離間させるようにリンク31、32が回動する。すると、連結軸33と連結軸34の位置変化に応じて、一対の鉗子部材35、36は、それぞれの先端の噛合部35b、36bを離間させる開き方向に開閉回動軸39を中心として相対回動する。 When the
図7及び図8に示すように、保持部12の外観を構成する保持部本体(保持部外観部材)77の後端部には貫通孔が形成され、この貫通孔内に、固定ナット40を介してチューブ固定環(中継環)41が取り付けられている。チューブ固定環41は金属製の部材である。図9に示すように、保持部本体77に対するチューブ固定環41の嵌合部は角筒状をなしていて、相対回転が規制されている。処置具操作ワイヤ28が挿通されるガイドチューブ29の後端部は、チューブ固定環41から保持部12の内方に突設された筒状ニップル部41a(図8)に被着され、固定用コイル45によって固定されている。ガイドチューブ29は、挿入部11に対応して変形可能な可撓性を有しているが、その先端部がワイヤガイド固定部材22に固定され、かつ後端部がチューブ固定環41に対して固定されているため、挿入部11や保持部12内において軸線方向への移動や軸線を中心とした回転は規制されている。また、チューブ固定環41は保持部12の後端面からの突出部41bを有し、この突出部に対して固定ネジ42によって連結口金43が固定されている。 As shown in FIGS. 7 and 8, a through hole is formed in the rear end portion of the holding portion main body (holding portion appearance member) 77 constituting the appearance of the holding
処置具操作ワイヤ28の後端に固定された補強パイプ44は、その前端が保持部12内に突出してガイドチューブ29内に挿入され、チューブ固定環41と連結口金43の内部に挿通されて、該連結口金43の後方に突出している。補強パイプ44の後端には固定用端部材46が取り付けられている。固定用端部材46の軸方向中間部は、その前後に比べて外径サイズの小さい小径部46aとなっている。処置具操作ワイヤ28と補強パイプ44、補強パイプ44と固定用端部材46はそれぞれ、ロウ付け、ハンダ付け、かしめ等の手法によって固定されており、固定用端部材46から処置具操作ワイヤ28までの全体が導電性を有している。 The reinforcing
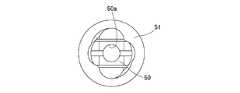
図10から図13に示すように、処置部操作ハンドル16の先端部分には、軸線方向に沿って複数のスリットが形成された筒状の口金連結体50が設けられ、口金連結体50の外側を囲んで締結環51が回転可能に支持されている。図11及び図13に示すように、口金連結体50の外形は2つの小判形を組み合わせた態様の断面形状をなしており、締結環51は、これに対応するように2つの小判形を組み合わせた内面形状を有している。口金連結体50の中央には、スリットの拡縮により形状を変化させる中央開口50aが形成されている。これにより、軸線を中心とした締結環51の回転動作に応じて、口金連結体50のスリットが開かれて中央開口50aが拡径される着脱可能状態と、スリットが狭められて中央開口50aが縮径される締結状態とにさせることができる。締結状態では、口金連結体50は、連結口金43に対して軸方向の動きは規制されるが、回転は自在である。図10と図11は着脱可能状態を示し、図12と図13は締結状態を示している。そして、図7のように連結口金43を口金連結体50の中央開口50aに差し込んだ状態で締結環51を回転させて締結状態にすることで、処置部操作ハンドル16を保持部12に取り付けることができる。逆に、口金連結体50の中央開口50aに連結口金43が差し込まれた状態で締結環51を着脱可能位置に回転させることで、保持部12から処置部操作ハンドル16を取り外すことができる。 As shown in FIGS. 10 to 13, a distal end portion of the treatment section operation handle 16 is provided with a
口金連結体50の後端には処置部操作ハンドル16の本体部を構成する筒体52が固定されている。筒体52内には軸線方向に向けて長溝52a(図1ないし図3)が形成されていて、この長溝52a内に、ワイヤ連結部材53の一部が軸線方向に摺動自在に嵌まっている。また、筒体52の外側には、フランジ状の指掛け部54aを外面に有するスライダ54が支持されている。ワイヤ連結部材53からは、筒体52の軸線と直交する径方向に向けて側方端子55が突出されていて、この側方端子55の基部と係合することによって、スライダ54は、ワイヤ連結部材53と一体化されている。すなわち、スライダ54とワイヤ連結部材53は、筒体52の軸線方向と該軸線を中心とした回転方向のいずれにも一体的に動作する。筒体52の前端部に設けた口金連結体50は連結口金43に対して回転可能に接続されるため、該口金連結体50と連結口金43の接続状態では、処置部操作ハンドル16の全体が保持部12(連結口金43)に対して軸回りに回転可能となる。また、筒体52は、ワイヤ連結部材53及びスライダ54と回転方向には一体化されているが、その軸線方向には、長溝52aによってワイヤ連結部材53及びスライダ54の相対移動を許容している。筒体52の末端部には指通しリング56が設けられている。 A
ワイヤ連結部材53には、固定用端部材46を挿入させるワイヤ端部支持孔53aが形成されている。側方端子55は、高周波スネアなどの電気処置具を使用する際に外部の電源部から高周波電流が入力される端子であり、ワイヤ連結部材53とはネジ結合されており、操作環55bを正逆に回転させることにより、側方端子55の内径側端部55aがワイヤ端部支持孔53a内への突出量を変化させる。組立時には、ワイヤ端部支持孔53a内への内径側端部55aの突出量を大きくさせ、固定部端部材46の小径部46aに当接させながら、該固定部端部材46をワイヤ端部支持孔53aの側面に押し当てる。このとき、側方端子55の内径側端部55aは、固定用端部材46の小径部46aに当接した状態になっているため、固定用端部材46がワイヤ端部支持孔53aに対して抜け止めされる。 The
前述の通り、ガイドチューブ29は、その一端部と他端部がワイヤガイド固定部材22とチューブ固定環41に固定されたガイド部材であり、このガイドチューブ29の内部に処置具操作ワイヤ28が挿通されている。ガイドチューブ29に対して処置具操作ワイヤ28は、その長手方向に摺動自在で、かつ内部での相対回転も自在に挿通されている。そのため、図2に矢印S1で示すように、処置部操作ハンドル16において筒体52に対してスライダ54を軸線方向に進退操作することにより、ワイヤ連結部材53を介して処置具操作ワイヤ28が、ガイドチューブ29内でその長手方向に進退される。このとき、補強パイプ44も処置具操作ワイヤ28と共に進退される。この処置具操作ワイヤ28の進退操作が先端処置部13(把持鉗子)側のスライド部材27に伝達され、前述したリンク機構を介して、図2に矢印S2で示すように一対の鉗子部材35、36が開閉動作を行う。このとき処置部操作ハンドル16は任意の態様で操作することができるが、例えば、指通しリング56に親指を通し、スライダ54の指掛け部54aに人差し指と中指をかけて操作するとよい。 As described above, the
さらに、図2に矢印D1で示すように、連結口金43に対して処置部操作ハンドル16を軸線中心で回転操作することより、ワイヤ連結部材53などを介して処置具操作ワイヤ28がガイドチューブ29内で相対回転される。前述のように、先端処置部13における回転自在枠24は、挿入部11先端の枠受け環23に対して、スナップリング25で抜け止めされつつ、軸線回りの回転動作を許容されて結合されている。そのため、処置具操作ワイヤ28が回転されると、ワイヤ先端部28aが接続するスライド部材27に回転力が伝えられ、回転自在枠24及びスライド部材27から先の先端処置部13全体が、図2に矢印D2で示すように軸線中心の回転動作を行う。図3は、図1の状態から先端処置部13を軸線回りに約90度回転させた状態を示している。 Further, as indicated by an arrow D1 in FIG. 2, the treatment
このように、先端処置部13は、処置具操作ワイヤ28を介して、挿入部11の長手方向への進退力を受けての開閉動作(処置動作)のみならず、軸線中心の回転動作も行わせることができる。この回転操作に対して捩れにくくするべく、処置具操作ワイヤ28は、互いに逆方向に巻いた3重巻きのワイヤケーブルや、超弾性ワイヤで形成されている。 As described above, the
内視鏡用処置具装置10はさらに、湾曲部14を湾曲操作させる湾曲操作機構を備えている。図4ないし図6に示されるように、湾曲部14には、被覆チューブ21の内側に位置させて、リベット61で相対回動可能に結合された複数の短筒状の節輪60が設けられている。隣接する2つの節輪60は、湾曲部14の径方向の対称位置に設けた一対のリベット61で接続されている。そして、この一対でペアをなすリベット61が90度ずつ周方向の位相を異ならせるようにして、複数の節輪60を接続している。これにより、湾曲部14は、その軸線に対して互いに直交する2つの方向でそれぞれ正逆に湾曲操作させることが可能となる。以下、この直交する2つの湾曲方向のうち一方を上下の湾曲方向、他方を左右の湾曲方向と呼ぶ。 The endoscope
図4に示すように、複数の節輪60のうち最も前方に位置する先端節輪60aは、固定ピン62を介してワイヤガイド固定部材22に固定されている。また、図6に示すように、最も後方の後端節輪60bは、湾曲部14と可撓管部15の境界部に設けたガイドコイル固定環63に対してロウ付けもしくはハンダ付けによって固定されている。ガイドコイル固定環63は、可撓管部15の内側チューブ57の先端に設けた接続環58に固定されており、この接続環58と内側チューブ57を覆う被覆チューブ59によって可撓管部15の外皮が構成されている。被覆チューブ59は絶縁材からなっている。 As shown in FIG. 4, the foremost
ガイドコイル固定環63にはコイルチューブ64の前端部が固定されている。コイルチューブ64は、可撓管部15内において処置具操作ワイヤ28のガイドチューブ29を囲むようにして周方向に90度等配で4本設けられており、図7、図8、図14及び図15に示すように、保持部12の内部を経由して湾曲操作グリップ17内へ延設されている。湾曲操作グリップ17内には、ガイドコイル固定環63に固定される側とは反対側の各コイルチューブ64の端部が固定されるコイルチューブ固定板65が設けられている。コイルチューブ固定板65は、湾曲操作グリップ17内の固定部材である親板72上に設けられている。 A front end portion of the
4本のコイルチューブ64内にはそれぞれ湾曲操作ワイヤ66が挿通されている。計4本の湾曲操作ワイヤ66は、湾曲部14内ではコイルチューブ64から突出して処置具操作ワイヤ28のガイドチューブ29を囲むようにして周方向に90度等配で配設されており、湾曲部14における径方向の対称位置にある一対が上下方向用の湾曲操作ワイヤ66UD(図4)を構成し、これと90度周方向位相の異なる別の一対が左右方向用の湾曲操作ワイヤ66LR(図5)を構成している。これら4本の湾曲操作ワイヤ66の先端部がワイヤ止め部材67に固定されている。ワイヤ止め部材67は先端節輪60aに係止された部材である。 The bending
4本の湾曲操作ワイヤ66の他端部は、湾曲操作グリップ17内においてコイルチューブ64から突出し、プーリーワイヤ68に接続している。プーリーワイヤ68は、親板72上に回動可能に支持されたプーリー69の軸部に巻回されていて、その一端部と他端部に一本ずつの湾曲操作ワイヤ66が接続している。図15に示すように、プーリー69は、上下方向湾曲操作用のプーリー69UDと左右方向湾曲操作用のプーリー69LRの2つが設けられており、これら2つのプーリー69UD、69LRは同軸上で互いに独立して回動可能になっている。プーリー69UDの軸部に巻回されるプーリーワイヤ68UDの一端部と他端部には、湾曲部14内において径方向の対称の位置関係にある一対の湾曲操作ワイヤ66UDが一本ずつ連結され、プーリー69UDを回転させると、この一対の湾曲操作ワイヤ66UDの一方が牽引され他方が弛緩される。同様に、プーリー69LRの軸部に巻回されるプーリーワイヤ68LRの一端部と他端部には、湾曲部14内において径方向の対称の位置関係にある一対の湾曲操作ワイヤ66LRが一本ずつ連結され、プーリー69LRを回転させると、この一対の湾曲操作ワイヤ66LRの一方が牽引され他方が弛緩される。図15及び図16に示すように、湾曲操作グリップ17には、プーリー69UDを正逆に回動操作する上下湾曲操作レバー(湾曲操作部材)70と、プーリー69LRを正逆に回動操作する左右湾曲操作レバー(湾曲操作部材)71とが設けられている。 The other ends of the four
プーリー69UDの回動により一対の湾曲操作ワイヤ66UDが牽引及び弛緩されると、湾曲部14内の複数の節輪60がリベット61を中心として相対回動し、湾曲部14が上下方向に湾曲される。同様に、プーリー69LRの回動により一対の湾曲操作ワイヤ66LRが牽引及び弛緩されると、湾曲部14内の複数の節輪60が、上下方向の湾曲時とは周方向に90度位相の異なるリベット61を中心として相対回動し、湾曲部14が左右方向に湾曲される。上下方向と左右方向は互いに直交する方向であり、そのいずれを上下方向、左右方向とするかは任意であるが、本実施形態の内視鏡用処置具装置10では、保持部12からの湾曲操作グリップ17の突設方向を上方としている。すなわち、図2に矢印R1で示すように上下湾曲操作レバー70を回動操作すると、同図に矢印R2で示すように湾曲部14が湾曲操作されるが、特に上方を意味する矢印U1方向への湾曲操作レバー70の回動操作で、湾曲部14が、湾曲操作グリップ17の突出方向であるU2方向へ湾曲される。また、図2では湾曲操作レバー70の背後に隠れていて見えていないが、左右湾曲操作レバー71を同様に矢印R1に沿って回動操作すると、湾曲部14は図2の紙面に対して直交する方向に湾曲される。このように、保持部12の軸線(処置具操作ワイヤ28の進退方向)に対する直交方向に向けて湾曲操作グリップ17を突設し、その突設方向を湾曲部14のいずれかの湾曲方向(本実施形態では上方)と一致させることにより、内視鏡用処置具装置10の操作者が湾曲部14の湾曲方向を直感的に認識することができ、操作性が向上している。 When the pair of bending operation wires 66UD are pulled and relaxed by the rotation of the pulley 69UD, the plurality of node rings 60 in the bending
湾曲操作グリップ17はまた、図2に矢印Cで示すように、保持部12の軸線と直交する軸(保持部12からの湾曲操作グリップ17の突出方向を向く軸)を中心として所定の範囲で角度調整可能に支持されている。図7、図8及び図14に示すように、保持部12は、可撓管部15の基端部材75が接続固定される可撓管接続部材76の外側を保持部本体77で覆った構造を備えている。可撓管接続部材76は金属製の部材であり、保持部本体77は合成樹脂製の部材である。保持部本体77の前端には、基端部材75を覆うカバー環73が設けられ、カバー環73の前部には、可撓管部15の基部の過度変形を防ぐ折れ止めゴム74が設けられている。そして、保持部本体77には、保持部12の軸線に対して直交する方向へ向けて円筒状の回転支持筒77aが突設されている。 As shown by an arrow C in FIG. 2, the bending
この回転支持筒77aの内周面に対して相対回転可能に湾曲操作グリップ17側の接続環78が挿入されている。図14に示すように、接続環78の上端部はプーリー69などを支持する親板72に固定され、また接続環78の外側は、円筒状の下部ハウジング80で覆われている。下部ハウジング80の上部は別の円筒状の中間ハウジング81で覆われ、さらに中間ハウジング81の上部はプーリー69を内部に収めたプーリーハウジング82で覆われている。湾曲操作グリップ17の外面を構成するこれら下部ハウジング80、中間ハウジング81及びプーリーハウジング82は全て、合成樹脂などの絶縁体で形成されている。 A connecting
回転支持筒77aからは径方向の対称位置に設けた一対のガイドピン(角度調整支持機構)79がその内径方向に突設され、接続環78に形成した一対の回動ガイド孔(角度調整支持機構)78aに挿入されている(図17、図18)。接続環78は、この一対の回動ガイド孔78aと一対のガイドピン79の案内関係によって、保持部12の軸線と直交する軸(湾曲操作グリップ17の突出方向の軸線)を中心として回転が可能に支持されており、この接続環78を介して湾曲操作グリップ17全体が保持部12に対して角度調整可能となっている。図17と図18に示すように、湾曲操作グリップ17は、それぞれの回動ガイド孔78aの端壁78b、78cがガイドピン79に当て付くことで回動規制される。図17に示す一方の回動端と、図18に示す回動端の間の湾曲操作グリップ17の回動角は約120度であるが、湾曲操作グリップ17の最大回動角は、これ以外の数値に設定してもよい。 A pair of guide pins (angle adjustment support mechanism) 79 provided in a radially symmetrical position from the
以上の内視鏡用処置具装置10では、挿入部11の先端に着脱可能な先端処置部13と、先端処置部13を操作する処置具操作ワイヤ28を除く部分は、液密(水密)密構造となっている。まず、挿入部11の先端側では、ワイヤガイド固定部材22と枠受け環23の間、ガイドチューブ29の先端部とワイヤガイド固定部材22の間、絶縁チューブ19と枠受け環23の間、被覆チューブ21とワイヤガイド固定部材22の間といった部位は、全て接着剤やロウ付けなどによって液密に塞がれている。また、保持部12内では、カバー環73と基端部材75の間、カバー環73と可撓管接続部材76の間、保持部本体77と可撓管接続部材76の間、保持部本体77とチューブ固定環41の間がそれぞれ、Oリング83a、83b、83c及び83dで密閉され、湾曲操作グリップ17では、回転支持筒77aと接続環78の間、接続環78と下部ハウジング80の間、下部ハウジング80と中間ハウジング81の間、中間ハウジング81とプーリーハウジング82の間がそれぞれ、Oリング83e、83f、83g及び83hで密閉されている(図7、図8、図14及び図15)。そして、保持部12に、以上の液密空間の内部と外気を連通して内圧調整を可能とさせる通気口金84が設けられている。 In the endoscope
以上のように、本実施形態の内視鏡用処置具装置10では、処置部操作ハンドル16によって先端処置部13を挿入部11の軸線を中心として回転操作可能に構成したことにより、湾曲部14が湾曲された状態でも鉗子部材35、36の開閉平面の方向を簡単に調整することができ、操作性が向上している。 As described above, in the endoscope
また、先端処置部13は、スナップリング25を縮径させることで挿入部11の先端から容易に取り外すことができるので、洗浄や消毒を行いやすい。また、処置具操作ワイヤ28が挿通されるガイドチューブ29は、挿入部11から保持部12にかけてほぼ一直線状に配設されているため、処置具操作ワイヤ28を引き抜いて交換する作業も容易に行うことができる。具体的には、処置具操作ワイヤ28は先端部側に先端処置部13が固定されているため、先端処置部13と共に挿入部11の先端部側(枠受け環23の枠支持孔23b)から前方に引き抜かれる。処置具操作ワイヤ28は後端部側に補強パイプ44と固定用端部材46が固定されているが、これら補強パイプ44と固定用端部材46は、可撓性を有するガイドチューブ29内を通ることが可能な程度の外径サイズであるため、ガイドチューブ29と干渉することなく引き抜くことができる。 Further, since the
また、本実施形態の内視鏡用処置具装置10では、湾曲操作グリップ17を、保持部12の軸線に対して直交する方向に突設させたことにより、一方の手で処置部操作ハンドル16を持った状態で、他方の手によって湾曲操作グリップ17を把持しやすくなり、先端処置部13の操作と湾曲部14の操作を連動させながら行うことが容易になっている。前述した通り、この湾曲操作グリップ17の突設方向を、湾曲部14の複数の湾曲方向の一つ(上方)と一致させたため、湾曲部14が挿入対象内に入っていて直接視認できない状態でも、操作グリップ17の向きによって直感的に湾曲方向を認識することができ、湾曲操作時の操作性向上に寄与している。さらに、保持部12に対して湾曲操作グリップ17を、その突設方向の軸線を中心に角度調整可能に支持させることで、湾曲操作グリップ17を把持する腕の向きが任意に変えられるため、内視鏡用処置具装置10に対して、後方或いは側方の任意の方向から操作することが可能になり、操作性がより一層向上している。 Further, in the endoscope
なお、実施形態の湾曲操作グリップ17では、湾曲操作用の操作部材としてL字状の湾曲操作レバー70、71を設けているが、これに代えて、内視鏡の湾曲操作ノブで知られるような同軸で回転する2段式の回転ノブを設けてもよい。 In the
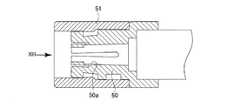
前述の通り、内視鏡用処置具装置10では、挿入部11の先端に対して、様々なタイプの先端処置部を取り付けることができる。図19は、把持鉗子に代えて高周波スネアの先端処置部113を取り付けた状態を示している。この先端処置部113は、処置具操作ワイヤ28のワイヤ先端部28aに接続するワイヤ接続部113aと、環状をなすループワイヤ部113bとを有している。ワイヤ接続部113aは、ワイヤガイド固定部材22と枠受け環23の内周面によって形成される進退ガイド孔26よりも小径で、図19に示す位置から右方へ移動してガイドチューブ29内へ入ることが可能である。ループワイヤ部113bは、その基端部付近が枠受け環23のテーパ内周面23dに接触することによって、その開口の大きさ(開度)が制御される。例えば、ワイヤ接続部113aが図19の位置よりも右手方向に移動されると、ループワイヤ部113bが挿入部11の内方に引き込まれてテーパ内周面23dに対する当接位置が変化する。その結果、ループワイヤ部113bの開口径が小さくなり、処置対象物を挟むことができる。なお、枠受け環23におけるループワイヤ部113bとの接触部を、先端側に進むにつれて開口径を徐々に大きくする部分円錐状のテーパ内周面23dとしたことで、ループワイヤ部113bが進退移動するときの抵抗や摩耗が抑制され、操作性や耐久性が向上している。 As described above, in the endoscope
処置具操作ワイヤ28を挿入部11の軸線を中心として回転させると、先端処置部113は、ループワイヤ部113bをテーパ内周面23dに対して摺接させながら回転され、ループワイヤ部113bを含む平面の向きを変化させることができる。よって、先の把持鉗子の場合と同様に、湾曲部14を湾曲させたままで先端処置部113の向きを容易に調整することができる。この回転操作時にも、ループワイヤ部113bが摺接する対象が部分円錐状のテーパ内周面23dであるため、ループワイヤ部113bの摩耗などが生じにくく円滑な回転動作を行わせることができる。 When the treatment
以上の内視鏡用処置具装置10では、挿入部11の先端を構成する先端硬性部材のうち、先端処置部13、113が接する枠受け環23をステンレスなどの金属で形成している。枠受け環23を金属製にしたことには次のようなメリットがある。挿入部11に対する先端処置部13(把持鉗子)の軸回りの回転動作時には、枠受け環23に対して回転自在枠24が相対回動する。金属製の枠受け環23は、耐摩耗性に優れており、回転自在枠24との相対回動の繰り返しによる劣化が起こりにくい。同様に、先端処置部113(高周波スネア)が挿入部11に対して軸回りに回転動作するときには、ループワイヤ部113bがテーパ内周面23dに対して摺接するが、金属製の枠受け環23には摺接の繰り返しによる摩耗が生じにくい。また、先端処置部113に関しては、ループワイヤ部113bの開口の大きさを変化させる際にも、ループワイヤ部113bとテーパ内周面23dとの間で摺動が生じるが、このときの耐摩耗性にも優れている。さらに、先端処置部113の使用時には、ループワイヤ部113bに高周波電流を流したときに火花が飛ぶおそれがあるが、ループワイヤ部113bに最も近い部材である枠受け環23が金属製であるため、火花による焼け焦げを防ぐことができる。 In the endoscope
なお、枠受け環23の外側は絶縁チューブ19により被覆されているため、先端処置部に高周波電流を流した際に、金属製の枠受け環23の外周面が挿入対象に直接に触れて火傷などを生じさせるおそれがない。また、枠受け環23の後部には絶縁体からなるワイヤガイド固定部材22が設けられており、節輪60など挿入部14内の金属部品と枠受け環23との間は絶縁性が保たれ、枠受け環23からの電流が他の金属部品に流れるおそれがない。 Since the outer side of the
また、処置具操作ワイヤ28が挿通されているガイドチューブ29は絶縁性の可撓性チューブからなるため、挿入部11から保持部12に至るまで、処置具操作ワイヤ28とその外側の部材とは絶縁されており、処置具操作ワイヤ28から直接に湾曲部14、可撓管部15あるいは保持部12内の金属部品に電流が流れるおそれもない。 Further, since the
さらに、保持部12において、ガイドチューブ29の端部が固定されるチューブ固定環41は、合成樹脂製の絶縁体からなる保持部本体77に支持されているので、チューブ固定環41から可撓管接続部材76に電流が流れることがない。また、湾曲操作ワイヤ66を案内するコイルチューブ64は、保持部12内でチューブ固定環41が設けられた後端部まで延設されずに、湾曲操作グリップ17側に向けて取り回しされているので、チューブ固定環41からコイルチューブ64や湾曲操作ワイヤ66に電流が流れることもない。 Furthermore, since the
以上のように、内視鏡用処置具装置10では、高周波電流が流される処置具操作ワイヤ28と、間接的に高周波電流が流れる位置にある枠受け環23及びチューブ固定環41は、他の金属部材に対して全て絶縁された構造になっている。そのため、高周波スネアなどの電気処置具を使用する場合に、金属部材から高周波電流が流れて火傷などを引き起こすおそれがない。特に、従来の処置具では、湾曲部の湾曲状態で引っ張られて薄肉になった外皮部分や、可撓管部の外皮にスポット的にできてしまった孔を通して電流が外部にリークするおそれがあったが、本実施形態では、湾曲部14や可撓管部15内の金属部品自体に高周波電流が流れないように絶縁されているので、そのようなリスクを解消できる。 As described above, in the endoscope
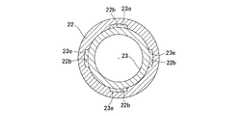
以上の実施形態では、挿入部11の先端硬性部材を構成するワイヤガイド固定部材22と枠受け環23は、環状凸部23aと環状凹部22aの間を接着剤で固定しているが、図20及び図21のように爪係合で一体化させることも可能である。すなわち、図20及び図21に示すワイヤガイド固定部材22は、環状凹部22aの底部付近に、内径サイズを拡大させた4つの爪係合凹部22bを周方向に略等間隔で有し、枠受け環23は、環状凸部23aの先端部付近の外周面に、外形サイズを拡大させた4つの係合爪23eを周方向に略等間隔で有している。係合爪23eは爪係合凹部22bに対して軸方向及び回転方向の移動が規制された状態で係合しており、これによってワイヤガイド固定部材22と枠受け環23が一体化されている。なお、爪係合凹部22bと係合爪23eの数は4つ以外であってもよいし、その形状も任意に設定できる。さらに、周方向に分割された形状の複数の爪係合凹部22bと複数の係合爪23eに換えて、周方向に連続する環状溝タイプの爪係合凹部と環状フランジ状の係合爪を係合させる態様も可能である。爪係合凹部と係合爪が環状である態様では、接着によって相対回転を規制することが好ましい。逆に言えば、図21に示す複数の爪係合凹部22bと複数の係合爪23eによる固定構造では、接着剤を用いずにワイヤガイド固定部材22と枠受け環23の回転方向及び軸方向の相対移動を規制することができるため、生産性に優れる。 In the above embodiment, the wire
以上、図示実施形態を参照して本発明を説明したが、本発明は図示実施形態に限定されるものではない。例えば、実施形態においては把持鉗子タイプの先端処置部13と高周波スネアの先端処置部113を例示したが、さらに針状メスなど別種の先端処置部に交換可能であってもよい。 While the present invention has been described with reference to the illustrated embodiment, the present invention is not limited to the illustrated embodiment. For example, in the embodiment, the grasping forceps type
10 内視鏡用処置具装置
11 挿入部
12 保持部
13 先端処置部
14 湾曲部
15 可撓管部
16 処置部操作ハンドル
17 湾曲操作グリップ
19 絶縁チューブ
20 網状管
21 被覆チューブ
22 ワイヤガイド固定部材
22a 環状凹部
22b 爪係合凹部
23 枠受け環(回転受け部)
23a 環状凸部
23b 枠支持孔(円形孔)
23c リング嵌合溝(環状溝)
23d テーパ内周面
23e 係合爪
24 回転自在枠
24a 後端円筒部(円筒部)
25 スナップリング(弾性環状体)
26 進退ガイド孔
27 スライド部材
28 処置具操作ワイヤ
28a ワイヤ先端部
29 ガイドチューブ(ワイヤガイド部材)
35 36 鉗子部材
39 開閉回動軸
40 固定ナット
41 チューブ固定環(中継環)
43 連結口金
44 補強パイプ
46 固定用端部材
46a 小径部
50 口金連結体
51 締結環
52 筒体
53 ワイヤ連結部材
53a ワイヤ端部支持孔
54 スライダ
54a 指掛け部
55 側方端子
56 指通しリング
60 節輪
61 リベット
63 ガイドコイル固定環
64 コイルチューブ
65 コイルチューブ固定板
66(66UD、66LR)湾曲操作ワイヤ
67 ワイヤ止め部材
68(68UD、68LR) プーリーワイヤ
69(69UD、69LR) プーリー
70 上下湾曲操作レバー(湾曲操作部材)
71 左右湾曲操作レバー(湾曲操作部材)
72 親板
75 基端部材
76 可撓管接続部材
77 保持部本体(保持部外観部材)
77a 回転支持筒
78 接続環
78a 回動ガイド孔(角度調整支持機構)
78b 78c 端壁(角度調整支持機構)
79 ガイドピン(角度調整支持機構)
80 下部ハウジング
81 中間ハウジング
82 プーリーハウジング
83a〜83h Oリング
84 通気口金
113 先端処置部
113a ワイヤ接続部
113b ループワイヤ部DESCRIPTION OF
23a annular
23c Ring fitting groove (annular groove)
23d Taper inner
25 Snap ring (elastic ring)
26 Advance /
35 36
43
71 Left / right bending operation lever (bending operation member)
72
77a
79 Guide pin (Angle adjustment support mechanism)
80
Claims (12)
Translated fromJapanese上記挿入部内に挿通されて上記先端処置部に接続する処置部操作ワイヤと;
を有する内視鏡用処置具において、
上記挿入部先端の回転受け部に対して、上記先端処置部を上記挿入部の長手方向軸を中心として回転自在に支持させ、
上記処置部操作ワイヤに対して、上記挿入部の長手方向への進退移動と、上記挿入部の長手方向軸を中心とする回転とを選択して与え、該処置部操作ワイヤの回転によって上記先端処置部に上記回転動作を行わせる操作手段を備えたことを特徴とする内視鏡用処置具。A distal treatment section provided at the distal end of the insertion section having flexibility, and performing a treatment within the insertion target;
A treatment portion operation wire inserted into the insertion portion and connected to the distal treatment portion;
In an endoscopic treatment instrument having
With respect to the rotation receiving portion at the distal end of the insertion portion, the distal treatment portion is supported rotatably about the longitudinal axis of the insertion portion,
The treatment portion operation wire is selectively given to the longitudinal movement of the insertion portion in the longitudinal direction and the rotation about the longitudinal axis of the insertion portion, and the distal end is obtained by the rotation of the treatment portion operation wire. An endoscopic treatment tool comprising operating means for causing the treatment section to perform the above-described rotation operation.
上記先端処置部は上記回転受け部の円形孔に相対回転自在に嵌る円筒部を有し、該円筒部の外面に、上記環状溝に弾性的に係合して上記円形孔から先端処置部を抜け止めさせる弾性環状体が支持されていることを特徴とする内視鏡用処置具。2. The endoscopic treatment device according to claim 1, wherein the rotation receiving portion has a circular hole opened on a distal end side of the insertion portion, and an inner diameter size is increased in a part of an inner peripheral surface of the circular hole. An annular groove is formed,
The distal treatment section has a cylindrical portion that is relatively rotatably fitted in the circular hole of the rotation receiving portion, and the distal treatment section is elastically engaged with the annular groove on the outer surface of the cylindrical portion from the circular hole. A treatment instrument for an endoscope, characterized in that an elastic annular body for retaining is supported.
上記先端処置部は、
上記回転受け部の円形孔内に挿入されて上記処置部操作ワイヤに接続するワイヤ接続部と;
該ワイヤ接続端部から延設され上記円形孔から外方に突出し、該円形孔の開口縁部との接触によって開度が規制されるループワイヤ部と;
を有しており、
上記回転受け部の円形孔の開口縁部が、上記挿入部の先端側に進むにつれて徐々に開口径を大きくする部分円錐状のテーパ内周面となっていることを特徴とする内視鏡用処置具。The endoscope treatment tool device according to claim 1, wherein the rotation receiving portion has a circular hole opened on a distal end side of the insertion portion,
The tip treatment section is
A wire connection portion inserted into the circular hole of the rotation receiving portion and connected to the treatment portion operation wire;
A loop wire portion extending from the wire connection end portion and projecting outward from the circular hole, the opening degree of which is regulated by contact with the opening edge of the circular hole;
Have
An opening edge portion of the circular hole of the rotation receiving portion is a partially conical tapered inner peripheral surface that gradually increases in opening diameter toward the distal end side of the insertion portion. Treatment tool.
絶縁体からなる保持部外観部材と;
この保持部外観部材を貫通して支持され、保持部の内側で上記ワイヤガイド部材の端部が接続固定され、保持部の外側に上記操作ハンドルを接続させる連結口金を支持した中継環と;
を備え、
上記処置部操作ワイヤは、上記中継環を貫通して保持部外方に延出されて上記操作ハンドルに接続されることを特徴とする内視鏡用処置具。The endoscope treatment tool device according to claim 7, wherein the holding portion is
A holding member exterior member made of an insulator;
A relay ring that is supported through the holding portion appearance member, the end portion of the wire guide member is connected and fixed inside the holding portion, and a coupling base that connects the operation handle to the outside of the holding portion;
With
The treatment instrument for an endoscope, wherein the treatment portion operation wire extends through the relay ring to the outside of the holding portion and is connected to the operation handle.
上記保持部から、上記挿入部と上記操作ハンドルを結ぶ保持部軸線と略直交する方向に向けて、上記湾曲部を湾曲操作するための湾曲操作グリップが突設されていることを特徴とする内視鏡用処置具。The endoscope treatment tool device according to claim 7 or 8, wherein a part of the insertion portion near the distal end is a bending portion capable of bending with respect to the longitudinal axis.
A bending operation grip for bending the bending portion protrudes from the holding portion in a direction substantially orthogonal to a holding portion axis line connecting the insertion portion and the operation handle. Endoscopic treatment tool.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008035893AJP2009189702A (en) | 2008-02-18 | 2008-02-18 | Endoscopic treatment instrument device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008035893AJP2009189702A (en) | 2008-02-18 | 2008-02-18 | Endoscopic treatment instrument device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009189702Atrue JP2009189702A (en) | 2009-08-27 |
Family
ID=41072287
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008035893APendingJP2009189702A (en) | 2008-02-18 | 2008-02-18 | Endoscopic treatment instrument device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009189702A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014161497A (en)* | 2013-02-25 | 2014-09-08 | Oita Seimitsu Industry Co Ltd | Minimally invasive surgical operation system |
| KR101885816B1 (en) | 2016-09-27 | 2018-08-07 | 한국기계연구원 | Operation Needle Holder |
| KR20190096544A (en)* | 2018-02-09 | 2019-08-20 | 한국기계연구원 | Apparatus for laparoscpoic surgery |
| EP4623795A1 (en)* | 2024-03-29 | 2025-10-01 | FUJIFILM Corporation | Operating device for endoscope auxiliary tool |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS48103957A (en)* | 1972-03-09 | 1973-12-26 | ||
| JPS628727A (en)* | 1985-07-03 | 1987-01-16 | 株式会社町田製作所 | Endoscope |
| JPH04136386A (en)* | 1990-09-28 | 1992-05-11 | Oi Seisakusho Co Ltd | Door hinge |
| JPH04361744A (en)* | 1991-06-07 | 1992-12-15 | Olympus Optical Co Ltd | High frequency excision and severance tool |
| JPH07275253A (en)* | 1994-04-05 | 1995-10-24 | Terumo Corp | Surgical instrument |
| JPH10151137A (en)* | 1996-11-25 | 1998-06-09 | Olympus Optical Co Ltd | Treatment appliance for endoscope |
| JP3406703B2 (en)* | 1994-09-28 | 2003-05-12 | ペンタックス株式会社 | Endoscope treatment tool |
| JP2006095146A (en)* | 2004-09-30 | 2006-04-13 | Pentax Corp | Endoscope snare |
| JP2007215787A (en)* | 2006-02-17 | 2007-08-30 | Pentax Corp | High frequency knife for endoscope |
| JP2007526042A (en)* | 2004-03-03 | 2007-09-13 | ジンテーズ ゲゼルシャフト ミト ベシュレンクテル ハフツング | Bone anchoring means |
- 2008
- 2008-02-18JPJP2008035893Apatent/JP2009189702A/enactivePending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS48103957A (en)* | 1972-03-09 | 1973-12-26 | ||
| JPS628727A (en)* | 1985-07-03 | 1987-01-16 | 株式会社町田製作所 | Endoscope |
| JPH04136386A (en)* | 1990-09-28 | 1992-05-11 | Oi Seisakusho Co Ltd | Door hinge |
| JPH04361744A (en)* | 1991-06-07 | 1992-12-15 | Olympus Optical Co Ltd | High frequency excision and severance tool |
| JPH07275253A (en)* | 1994-04-05 | 1995-10-24 | Terumo Corp | Surgical instrument |
| JP3406703B2 (en)* | 1994-09-28 | 2003-05-12 | ペンタックス株式会社 | Endoscope treatment tool |
| JPH10151137A (en)* | 1996-11-25 | 1998-06-09 | Olympus Optical Co Ltd | Treatment appliance for endoscope |
| JP2007526042A (en)* | 2004-03-03 | 2007-09-13 | ジンテーズ ゲゼルシャフト ミト ベシュレンクテル ハフツング | Bone anchoring means |
| JP2006095146A (en)* | 2004-09-30 | 2006-04-13 | Pentax Corp | Endoscope snare |
| JP2007215787A (en)* | 2006-02-17 | 2007-08-30 | Pentax Corp | High frequency knife for endoscope |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014161497A (en)* | 2013-02-25 | 2014-09-08 | Oita Seimitsu Industry Co Ltd | Minimally invasive surgical operation system |
| KR101885816B1 (en) | 2016-09-27 | 2018-08-07 | 한국기계연구원 | Operation Needle Holder |
| KR20190096544A (en)* | 2018-02-09 | 2019-08-20 | 한국기계연구원 | Apparatus for laparoscpoic surgery |
| KR102097782B1 (en) | 2018-02-09 | 2020-04-06 | 한국기계연구원 | Apparatus for laparoscpoic surgery |
| EP4623795A1 (en)* | 2024-03-29 | 2025-10-01 | FUJIFILM Corporation | Operating device for endoscope auxiliary tool |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2596741B1 (en) | Endoscope, and treatment instrument for endoscope | |
| EP2540240B1 (en) | Therapeutic tool for endoscopes | |
| JP5617056B2 (en) | Insert body, insertion device, rotation unit, rotational force transmission unit | |
| JP3634644B2 (en) | Endoscope operation part | |
| JP2008173472A (en) | MEDICAL DEVICE, ENDOSCOPE TREATMENT TOOL, AND ENDOSCOPE DEVICE | |
| JP5253676B2 (en) | Endoscope | |
| EP3005967B1 (en) | High frequency treatment tool | |
| JP5860742B2 (en) | Advancing / retreating aid for endoscopic treatment tools | |
| EP2415408B1 (en) | Treatment device | |
| WO2012070570A1 (en) | Balloon-equipped catheter having variable stiffness insertion section, and endoscope with second bendable section | |
| EP3216380A1 (en) | Assist tool and endoscope system | |
| JP2009189702A (en) | Endoscopic treatment instrument device | |
| JP4706008B2 (en) | Cardiac catheter | |
| WO2019225102A1 (en) | Tip cover device | |
| JP4726009B2 (en) | Cardiac catheter | |
| JP6095864B2 (en) | Advancement / retraction aid, endoscope, and endoscope system | |
| JP6854932B2 (en) | Endoscope | |
| JP6230227B2 (en) | Insertion device and endoscope | |
| JP2009189703A (en) | Endoscope aids | |
| JP2010069108A (en) | Endoscope | |
| US11224331B2 (en) | Advance and retreat assisting tool for treatment instrument and endoscope system | |
| EP3490428B1 (en) | Steerable catheter handle | |
| JP6655396B2 (en) | Treatment tool insertion tool | |
| JP5653814B6 (en) | Endoscopic high-frequency treatment instrument | |
| JP5653814B2 (en) | Endoscopic high-frequency treatment instrument |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant | Free format text:JAPANESE INTERMEDIATE CODE: A712 Effective date:20100507 | |
| A521 | Written amendment | Free format text:JAPANESE INTERMEDIATE CODE: A821 Effective date:20100712 | |
| RD02 | Notification of acceptance of power of attorney | Free format text:JAPANESE INTERMEDIATE CODE: A7422 Effective date:20100712 | |
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20101008 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20120706 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20120717 | |
| A02 | Decision of refusal | Free format text:JAPANESE INTERMEDIATE CODE: A02 Effective date:20121113 |