JP2006081664A - Medical system and method for controlling medical system - Google Patents
Medical system and method for controlling medical systemDownload PDFInfo
- Publication number
- JP2006081664A JP2006081664AJP2004268468AJP2004268468AJP2006081664AJP 2006081664 AJP2006081664 AJP 2006081664AJP 2004268468 AJP2004268468 AJP 2004268468AJP 2004268468 AJP2004268468 AJP 2004268468AJP 2006081664 AJP2006081664 AJP 2006081664A
- Authority
- JP
- Japan
- Prior art keywords
- medical
- foot switch
- medical system
- setting
- medical devices
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034methodMethods0.000titleclaimsdescription24
- 238000011282treatmentMethods0.000claimsabstractdescription44
- 230000008859changeEffects0.000claimsabstractdescription20
- 238000012790confirmationMethods0.000claims2
- 238000001356surgical procedureMethods0.000abstractdescription10
- 208000005646PneumoperitoneumDiseases0.000abstract1
- 230000006870functionEffects0.000description28
- 238000010586diagramMethods0.000description11
- 238000004891communicationMethods0.000description9
- 230000002093peripheral effectEffects0.000description5
- 230000009471actionEffects0.000description4
- 230000000694effectsEffects0.000description4
- 238000005516engineering processMethods0.000description3
- 238000009211ultrasonic lithotripsyMethods0.000description3
- 210000000683abdominal cavityAnatomy0.000description2
- 230000008569processEffects0.000description2
- 238000012545processingMethods0.000description2
- 230000009467reductionEffects0.000description2
- 230000008901benefitEffects0.000description1
- 230000015271coagulationEffects0.000description1
- 238000005345coagulationMethods0.000description1
- 230000006872improvementEffects0.000description1
- 238000002347injectionMethods0.000description1
- 239000007924injectionSubstances0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 238000012544monitoring processMethods0.000description1
- 239000004575stoneSubstances0.000description1
- 238000002604ultrasonographyMethods0.000description1
Images









Landscapes
- Laser Surgery Devices (AREA)
- Surgical Instruments (AREA)
Abstract
Description
Translated fromJapanese本発明は、医療用システムおよびその制御技術に関し、特に、複数の医療機器を制御装置にて集中制御する構成の医療用システム等に適用して有効な技術に関する。 The present invention relates to a medical system and a control technique thereof, and more particularly to a technique effective when applied to a medical system having a configuration in which a plurality of medical devices are centrally controlled by a control device.
近年の医療技術の分野では、電気エネルギーを用いる電気メス、超音波エネルギーを用いる超音波手術器や結石破石装置、レーザエネルギーを用いるレーザメス等、各種エネルギーを用いて医療行為を行う医療機器が普及してきている。 In the field of medical technology in recent years, medical instruments that use various types of energy, such as electric scalpels that use electrical energy, ultrasonic surgical instruments and stone lithotripters that use ultrasonic energy, and laser scalpels that use laser energy, have become widespread. Have been doing.
ところで、医療技術の高度化、複雑化に伴い、これらの各種医療機器を組み合わせて用いることが必須となってきており、たとえば、特許文献1のように、複数の医療機器を集中管理する技術が知られている。 By the way, with the advancement and complexity of medical technology, it is indispensable to use these various medical devices in combination. For example, as in Patent Document 1, a technology for centrally managing a plurality of medical devices is available. Are known.
この場合、集中管理される複数の医療機器に共通なフットスイッチを設け、フットスイッチの特定の機能選択ボタンを踏むことにより、登録してある周辺機器のどれを使用するかを選択することが考えられる。 In this case, it is possible to select which peripheral device to use by providing a common foot switch for multiple medical devices that are centrally managed and pressing a specific function selection button on the foot switch. It is done.
ところが、フットスイッチの機能選択ボタンを踏むことにより、登録してある周辺機器のどれを使用するかを選択する場合には、機能選択ボタンの誤操作(踏み間違い)、登録間違い等が発生した時、操作したい機器が操作出来ず、操作性が悪い、という技術的課題があった。 However, when selecting which of the registered peripherals to use by stepping on the function selection button of the foot switch, when an incorrect operation of the function selection button (stepping error), registration error, etc. occurs, There was a technical problem that the device to be operated could not be operated and the operability was poor.
なお、特許文献2には、超音波診断装置等の医療機器に接続されたフットスイッチに複数のスイッチを設け、これらの各スイッチの超音波診断装置における個々の機能への割り当てを変更することで、フットスイッチによる遠隔操作における操作性を向上させようとしているが、異なる複数の医療機器を共通のフットスイッチにて操作する場合の上述のような技術的課題は認識されていない。
本発明の目的は、フットスイッチによって複数の医療機器を操作する医療用システムにおける誤操作を確実に防止することにある。
本発明の他の目的は、フットスイッチによって複数の医療機器を操作する医療用システムにおける操作対象の医療機器の誤登録を確実に防止することにある。An object of the present invention is to reliably prevent erroneous operation in a medical system in which a plurality of medical devices are operated by a foot switch.
Another object of the present invention is to reliably prevent erroneous registration of a medical device to be operated in a medical system that operates a plurality of medical devices with a foot switch.
本発明の他の目的は、フットスイッチによって複数の医療機器を操作する医療用システムにおける操作性の向上を実現することにある。 Another object of the present invention is to realize an improvement in operability in a medical system in which a plurality of medical devices are operated by a foot switch.
本発明の第1の観点は、複数の医療機器を制御する制御装置と、複数の前記医療機器に共通に設けられ、前記医療機器を操作するフットスイッチと、を含む医療用システムであって、
前記制御装置は、
任意の前記医療機器を用いた処置中か否かを記憶する記憶手段と、
前記フットスイッチの操作対象を複数の前記医療機器の一つに選択的に設定する設定操作を行うとともに、前記処置中の場合には前記設定操作を抑止する設定制御手段と、
を含む医療用システムを提供する。A first aspect of the present invention is a medical system including a control device that controls a plurality of medical devices, and a foot switch that is provided in common to the plurality of medical devices and operates the medical devices,
The controller is
Storage means for storing whether or not a treatment using any of the medical devices is in progress;
A setting control means for performing a setting operation for selectively setting an operation target of the foot switch to one of the plurality of medical devices, and for suppressing the setting operation during the treatment,
A medical system including
本発明の第2の観点は、複数の医療機器を制御する制御装置と、複数の前記医療機器に共通に設けられ、前記医療機器を操作するフットスイッチと、を含む医療用システムであって、
前記制御装置は、前記制御装置に接続される前記医療機器の構成変更に連動して、前記フットスイッチの操作対象を複数の前記医療機器の一つに選択的に設定する設定操作を行う設定制御手段を含む医療用システムを提供する。A second aspect of the present invention is a medical system including a control device that controls a plurality of medical devices, and a foot switch that is provided in common to the plurality of medical devices and operates the medical devices,
The control device performs setting operation for selectively setting an operation target of the foot switch to one of the plurality of medical devices in conjunction with a configuration change of the medical device connected to the control device. A medical system including means is provided.
本発明の第3の観点は、複数の医療機器を制御する制御装置と、複数の前記医療機器に共通に設けられ、前記医療機器を操作する複数の操作ボタンを備えたフットスイッチと、を含む医療用システムであって、
前記制御装置は、複数の前記操作ボタンの同時押下によって、前記フットスイッチの操作対象を複数の前記医療機器の一つに選択的に設定する設定操作を行う設定制御手段を含む医療用システムを提供する。A third aspect of the present invention includes a control device that controls a plurality of medical devices, and a foot switch that is provided in common to the plurality of medical devices and includes a plurality of operation buttons that operate the medical devices. A medical system,
The control device provides a medical system including setting control means for performing a setting operation for selectively setting an operation target of the foot switch to one of the plurality of medical devices by simultaneously pressing a plurality of the operation buttons. To do.
本発明の第4の観点は、複数の医療機器を集中制御する制御装置にフットスイッチを接続し、前記フットスイッチによる操作対象の前記医療機器を切り替えて制御する医療用システムの制御方法であって、
前記医療機器を用いた処置中は、前記フットスイッチの操作対象の設定操作を抑止する医療用システムの制御方法を提供する。A fourth aspect of the present invention is a control method for a medical system in which a foot switch is connected to a control device that centrally controls a plurality of medical devices, and the medical device to be operated is switched and controlled by the foot switch. ,
Provided is a medical system control method for suppressing a setting operation of an operation target of the foot switch during a treatment using the medical device.
本発明の第5の観点は、複数の医療機器を集中制御する制御装置にフットスイッチを接続し、前記フットスイッチによる操作対象の前記医療機器を切り替えて制御する医療用システムの制御方法であって、
前記制御装置に対する前記医療機器の接続構成の変化に連動して、前記フットスイッチの操作対象となる前記医療機器の設定を実行する医療用システムの制御方法を提供する。According to a fifth aspect of the present invention, there is provided a medical system control method in which a foot switch is connected to a control device that centrally controls a plurality of medical devices, and the medical device to be operated is switched and controlled by the foot switch. ,
Provided is a medical system control method for executing setting of the medical device to be operated by the foot switch in conjunction with a change in the connection configuration of the medical device with respect to the control device.
本発明の第6の観点は、複数の医療機器を集中制御する制御装置に複数の操作ボタンを備えたフットスイッチを接続し、前記フットスイッチによる操作対象の前記医療機器を切り替えて制御する医療用システムの制御方法であって、
複数の前記操作ボタンの同時押下により前記フットスイッチによる操作対象の前記医療機器の切り替えを行う医療用システムの制御方法を提供する。A sixth aspect of the present invention is a medical device in which a foot switch having a plurality of operation buttons is connected to a control device that centrally controls a plurality of medical devices, and the medical device to be operated by the foot switch is switched and controlled. A system control method comprising:
A medical system control method for switching the medical device to be operated by the foot switch by simultaneously pressing a plurality of the operation buttons is provided.
上記した本発明の第1および第4の観点によれば、任意の医療機器を用いた処置中に、フットスイッチと操作対象の医療機器との設定状態が変化しないので、術者が気づかない間にフットスイッチによる操作対象の医療機器が変化してしまうことに起因する医療機器の誤操作を確実に防止できる。 According to the first and fourth aspects of the present invention described above, since the setting state of the foot switch and the medical device to be operated does not change during the treatment using any medical device, the operator is not aware of it. In addition, it is possible to reliably prevent erroneous operation of the medical device due to the change of the medical device to be operated by the foot switch.
また、上記した本発明の第2および第5の観点によれば、制御装置に対する複数の医療機器の接続構成が変化した場合には、この接続構成の変化に連動して必ず、フットスイッチと、その操作対象となる医療機器との接続設定が行われるので、フットスイッチと医療機器との接続関係の誤設定等に起因する誤操作を確実に防止できる。 In addition, according to the second and fifth aspects of the present invention described above, when the connection configuration of a plurality of medical devices to the control device is changed, the foot switch is always linked to the change in the connection configuration, Since the connection setting with the medical device to be operated is performed, it is possible to reliably prevent an erroneous operation caused by an erroneous setting of the connection relationship between the foot switch and the medical device.
また、上記した本発明の第3および第6の観点によれば、フットスイッチに設定切り替えのための特別な操作ボタン等を必要としないため、構成が簡略化されるととも、操作するボタンの数が減少したことにより、操作性が向上する。 In addition, according to the third and sixth aspects of the present invention described above, since the foot switch does not require a special operation button or the like for switching the setting, the configuration is simplified and the button to be operated is operated. The operability is improved by reducing the number.
本発明によれば、フットスイッチによって複数の医療機器を操作する医療用システムにおける誤操作を確実に防止することができる。
また、本発明によれば、フットスイッチによって複数の医療機器を操作する医療用システムにおける操作対象の医療機器の誤登録を確実に防止することができる。ADVANTAGE OF THE INVENTION According to this invention, the misoperation in the medical system which operates a some medical device with a foot switch can be prevented reliably.
Further, according to the present invention, it is possible to reliably prevent erroneous registration of an operation target medical device in a medical system that operates a plurality of medical devices with a foot switch.
また、本発明によれば、フットスイッチによって複数の医療機器を操作する医療用システムにおける操作性の向上を実現することができる。 In addition, according to the present invention, it is possible to improve operability in a medical system that operates a plurality of medical devices by a foot switch.
以下、図面を参照しながら、本発明の実施の形態について詳細に説明する。なお、以下の説明で各図および各実施の形態において共通な要素には同一の符号を付して重複した説明は割愛する。 Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. In the following description, common elements in the drawings and the embodiments are denoted by the same reference numerals, and redundant descriptions are omitted.
(実施の形態1)
図1は、本発明の一実施の形態である医療システムの構成の一部を示すブロック図であり、図2は、その全体構成の一例を示す概念図、図3は、その制御装置の構成の一例を示すブロック図、図4は、本実施の形態の医療システムにて用いられる情報の一例を示す概念図、図5は、本実施の形態の医療システムの作用の一例を示すフローチャートである。(Embodiment 1)
FIG. 1 is a block diagram showing a part of the configuration of a medical system according to an embodiment of the present invention, FIG. 2 is a conceptual diagram showing an example of the overall configuration, and FIG. 3 is the configuration of the control device FIG. 4 is a conceptual diagram showing an example of information used in the medical system of the present embodiment, and FIG. 5 is a flowchart showing an example of the operation of the medical system of the present embodiment. .
図1および図2に例示されるように、本実施の形態の医療システム1は、コントローラ10に、電気メス3、超音波手術器4、気腹器5、テレビカメラ6等の複数の医療機器2を、シリアル通信線8を介して接続した構成となっており、これらの医療機器2は、コントローラ10にて統括して制御される。 As illustrated in FIGS. 1 and 2, the medical system 1 according to the present embodiment includes a
電気メス3には、コントローラ10に接続するためのシリアル通信線8およびコネクタ8aと、被術体90に対して高周波エネルギーを印加して所望の手術を行うためのハンドピース等からなる手術器具3aが設けられている。この手術器具3aへの高周波エネルギーの印加のON/OFFは、後述のように、コントローラ10に接続されているフットスイッチ7にて制御される。 The electric knife 3 includes a
すなわち、フットスイッチ7には、医療機器2における超音波や高周波電力等のエネルギー出力のON/OFFを制御するためのON/OFF操作ボタン7aと、後述のようにして、複数の医療機器2の中から、フットスイッチ7の操作対象となる医療機器を選択するための操作に用いられる機能選択ボタン7bと、選択された医療機器2をフットスイッチ設定テーブル20に登録するための登録ボタン7cを備えている。 That is, the
同様に、超音波手術器4には、コントローラ10に接続するためのシリアル通信線8およびコネクタ8aと、被術体90に対して超音波エネルギーを印加して所望の手術を行うためのハンドピース等からなる手術器具4aが設けられている。この手術器具4aへの超音波エネルギーの印加のON/OFFは、後述のように、コントローラ10に接続されたフットスイッチ7にて制御される。 Similarly, the ultrasonic surgical instrument 4 includes a
気腹器5には、コントローラ10に接続するためのシリアル通信線8およびコネクタ8aと、被術体90の腹腔内等に空気を注入するための気腹チューブ5aが設けられている。気腹チューブを介した腹腔内等への空気の注入のON/OFFは、コントローラ10に接続されたフットスイッチ7にて制御される。 The
テレビカメラ6には、コントローラ10に接続するためのシリアル通信線8およびコネクタ8aと、被術体90の手術部位等を撮影するためのカメラヘッド6aと、カメラヘッド6aにて撮影された映像を術者に提示するためのモニタ6bが設けられている。テレビカメラ6のズーム拡大/縮小等の制御も、必要に応じてコントローラ10に接続されたフットスイッチ7にて行うことができる。 The
コントローラ10には、術者等がこれらの医療機器2を集中制御するための情報の入出力を行うための集中表示パネル11、集中操作パネル13、スピーカー17が、映像ケーブル12、通信・映像ケーブル14等を介して接続されている。そして、個々の医療機器2のステータス/警告等を集中表示パネル18およびスピーカー17にて術者に通知する。 The
本実施の形態の場合、集中操作パネル13には、必要に応じて、図1に例示されるように、手術開始ボタン13a、手術終了ボタン13bを表示することが可能であり、術者は、複数の医療機器2の任意の一つを操作する場合に、手術開始ボタン13aにてコントローラ10に手術等の処置の開始を指示し、処置の終了後、手術終了ボタン13bにてコントローラ10に処置の終了を指示することが可能になっている。 In the case of the present embodiment, the
また、コントローラ10には、フットスイッチ信号線9を介して、複数の医療機器2に共通に設けられた一つのフットスイッチ7が接続されており、コントローラ10は、このフットスイッチ7の操作対象となる医療機器2を特定の一つに切り替え可能に設定することで、術者がフットスイッチ7を操作して、上述の複数の医療機器2の任意の一つを遠隔操作することが可能となっている。 The
図3に例示されるように、本実施の形態のコントローラ10は、一例として、MPU(マイクロプロセッサ)10aと、このMPU10aが実行するプログラムや、データ等の情報が格納される主記憶10bと、MPU10aが実行するプログラムやデータ等の情報を持久的に保持するための不揮発メモリ10cと、これらが相互に接続されるバス10dを備えている。この不揮発メモリ10cは内部データの変更が可能である。不揮発メモリ10cに格納されているプログラムやデータ等の情報は、必要に応じて主記憶10bにロードされ、MPU10aにて実行される。また、MPU10aは、不揮発メモリ10cの情報に直接アクセスすることもできる。 As illustrated in FIG. 3, the
さらに、コントローラ10には、当該コントローラ10に接続される複数の医療機器2との間における情報の授受を制御する周辺機器制御部10eと、この周辺機器制御部10eに複数の医療機器2を個別に接続するためのシステムコネクタ10f、集中表示パネル11、集中操作パネル13、スピーカー17等が汎用コネクタ10hを介して接続されるユーザインターフェイス制御部10gが設けられている。 Further, the
また、ユーザインターフェイス制御部10gには、フットスイッチ専用コネクタ10i、フットスイッチ信号線9を介してフットスイッチ7が接続されている。
本実施の形態の場合、不揮発メモリ10cには、医療システム1の全体を制御する動作、および後述のフローチャートに例示される制御動作を行う機能を備えた制御プログラム30と、フットスイッチ設定テーブル20が格納されている。In addition, a
In the case of the present embodiment, the nonvolatile memory 10c includes a
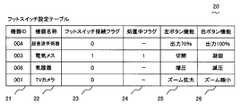
図4に例示されるように、フットスイッチ設定テーブル20は、コントローラ10に接続されている医療機器2の、機器ID21、機器名称22、フットスイッチ7の操作対象に設定されているか否かを識別するためのフットスイッチ接続フラグ23、特定の医療機器2をフットスイッチ7の操作対象に設定した状態にて医療システム1が処置中か否かを示す処置中フラグ24、等の情報が格納されている。 As illustrated in FIG. 4, the foot switch setting table 20 identifies whether or not the
フットスイッチ接続フラグ23は、フットスイッチ7の操作対象の機器として選択されてフットスイッチ7に接続中の場合に“1”、フットスイッチ7の操作対象に設定されていない時に“0”、が設定される。 The foot
処置中フラグ24は、接続中の医療機器2を用いて被術体90に対する所望の処置を実行中の場合(すなわち、上述のように、手術開始ボタン13aにて術者から処置開始が指示された場合)に“1”が設定され、処置中でない場合(すなわち、上述のように、手術終了ボタン13bにて術者から処置終了が指示された場合)は“0”が設定される。なお、フットスイッチ接続フラグ23が“0”でフットスイッチ7の操作対象となっていない医療機器2のエントリでは処置中フラグ24は意味がなく、不定(−)あるいは空欄となる。 The in-
以下、本実施の形態の作用の一例について、図5のフローチャート等を参照して説明する。
まず、現在、電気メス3がフットスイッチ7の操作対象の医療機器2として選択され(フットスイッチ接続フラグ23が“1”)、処置中フラグ24は“0”、すなわち処置中ではないものとする。Hereinafter, an example of the operation of the present embodiment will be described with reference to the flowchart of FIG.
First, it is assumed that the electric knife 3 is currently selected as the
この状態で、術者は、集中操作パネル13の手術開始ボタン13aを押す(タッチ)することで、電気メス3を用いた処置の開始をコントローラ10に指示し、この指示を受けたコントローラ10は、図4のように、フットスイッチ設定テーブル20の、現在選択されている電気メス3の処置中フラグ24を“1”(処置中)に設定する。なお、この処置中フラグ24の設定および解除のための手術開始ボタン13aの押下および手術終了ボタン13bの押下の有無は、割り込み処理にてコントローラ10が随時、検出する。 In this state, the operator presses (touches) the
図5のフローチャートに例示されるように、コントローラ10は、まず、フットスイッチ7の当該コントローラ10に対する接続の有無を確認し(ステップ101)、フットスイッチ7が接続されている場合には、フットスイッチ設定テーブル20の設定状態に基づいて、フットスイッチ7の操作対象の医療機器2を決定する(ステップ102)。ステップ101の判定でフットスイッチ7がコントローラ10に接続されていない場合には終了する。 As illustrated in the flowchart of FIG. 5, the
そして、コントローラ10は、術者によるフットスイッチ7の操作を検出すると、まず、ON/OFF操作ボタン7aの操作か判定し(ステップ103)、ON/OFF操作ボタン7aの操作の場合には、フットスイッチ設定テーブル20のフットスイッチ接続フラグ23に設定されている操作対象の医療機器2(この場合、電気メス3)に対してエネルギー出力のON/OFFの制御信号を出力する。(ステップ109)。 When the
ステップ103で、ON/OFF操作ボタン7aの操作でない場合には、さらに機能選択ボタン7bの操作か判別し(ステップ102)、機能選択ボタン7bの操作でない場合は、ステップ103のフットスイッチ7の操作監視に戻る。すなわち、ON/OFF操作ボタン7a、機能選択ボタン7b以外の登録ボタン7cの押下は、この段階では無視される。 If it is not the operation of the ON /
上述のステップ104で機能選択ボタン7bの操作と判定された場合には、フットスイッチ7と医療機器2の接続関係の切り替えが可能か否かをフットスイッチ設定テーブル20の処置中フラグ24を参照して判別する(ステップ105)。この場合、上述のように、処置中フラグ24は“1”(ON)に設定されており、処置中であるため、ステップ106〜ステップ108の実行は抑止され、すなわち、機能選択ボタン7bの操作は無視され、ステップ103に戻る。 When it is determined in
一方、術者が、任意の契機で集中操作パネル13の手術終了ボタン13bを操作して処置中フラグ24が“0”(OFF)になると、上述の、ステップ104、ステップ105における機能選択ボタン7bの操作は有効となり、コントローラ10は、たとえば、術者に、コントローラ10に接続されて現在利用可能な医療機器2の一覧を集中表示パネル11に表示し、機能選択ボタン7bを適宜操作することで、その中の一つを選択させ(ステップ106)、さらに、登録ボタン7cの押下の有無にて選択内容を確定させ(ステップ107)、コントローラ10は、選択された医療機器2に対応するフットスイッチ設定テーブル20のフットスイッチ接続フラグ23を“1”に設定する(ステップ108)。 On the other hand, when the surgeon operates the
このように、本実施の形態の場合は、任意の医療機器2が選択されて、当該医療機器2を使用する処置中(処置中フラグ24が“1”の状態)の場合には、機能選択ボタン7b、登録ボタン7cによるフットスイッチ7の操作対象となる医療機器2の選択操作が抑止されるので、特定の医療機器2を使用する処置中に、フットスイッチ7の操作対象が他の医療機器2に誤って切り替えられる誤操作が確実に防止される。 Thus, in the case of the present embodiment, when an arbitrary
すなわち、手術開始ボタン13aを押下し、処置を開始したら、手術終了ボタン13bを押下し処置を終了するまでの間、フットスイッチ7による医療機器2の選択が禁止されるため、フットスイッチ7の誤操作(踏み間違い)等により設定が変わることによる意図しない医療機器2のエネルギー出力動作を防止でき、操作性および操作の確実性が向上する。 That is, when the
これにより、コントローラ10に複数の医療機器2を接続し、共通のフットスイッチ7にて集中制御する構成の医療システム1において、フットスイッチ7の操作性およびフットスイッチ7の操作対象となる医療機器2の選択および登録操作の確実性が向上する。 As a result, in the medical system 1 configured to connect a plurality of
(実施の形態2)
図6は、本発明の他の実施の形態である医療用システムの構成および作用の一例を示す概念図であり、図7は、その作用の一例を示すフローチャート、図8および図9は、本実施の形態の医療用システムにて用いられる画面例を説明する説明図である。(Embodiment 2)
FIG. 6 is a conceptual diagram showing an example of the configuration and operation of a medical system according to another embodiment of the present invention, FIG. 7 is a flowchart showing an example of the operation, and FIGS. It is explanatory drawing explaining the example of a screen used with the medical system of embodiment.
この実施の形態2では、コントローラ10に対する複数の医療機器2の接続構成に変化が発生した場合に、任意の医療機器2に対するフットスイッチ70の接続設定を必ず実行する場合について説明する。 In the second embodiment, a case will be described in which the connection setting of the
なお、この実施の形態2では、フットスイッチ70には、左ボタン71および右ボタン72の二つの操作ボタンが設けられた場合が例示されている。
図6のように、たとえば、超音波破石装置16、超音波手術器4、録画装置15がコントローラ10に接続されており、術者のフットスイッチ70の操作にて、これらの医療機器2が集中制御される構成状態において、超音波破石装置16の代わりに電気メス3をコントローラ10に接続する操作が行われたとすると、本実施の形態のコントローラ10は、図7のようなフローチャートの処理にて、フットスイッチ7の操作対象となる医療機器2の設定操作を必ず実行させる。In the second embodiment, the
As shown in FIG. 6, for example, the
たとえば、超音波破石装置16を電気メス3に変更した場合、コントローラ10の設定を更新するために集中操作パネル13に設定登録画面を表示するが、その設定登録項目の最後に、必ずフットスイッチ設定登録を行う。超音波破石装置16を電気メス3に変更した場合、設定登録項目の最後で必ずフットスイッチ設定登録を行うので、変更前の超音波破石装置16のフットスイッチ設定のまま電気メス3が操作されることが無くなる。 For example, when the
すなわち、医療機器2のコントローラ10に対する接続状態に変化があったか監視し(ステップ111)、変更があった場合には、たとえば、集中操作パネル13に設定登録画面40(図6)のような操作画面を術者に提示して構成変更の設定操作をすべての接続機器(医療機器2)について行わせる(ステップ112、ステップ113)。 That is, it is monitored whether there is a change in the connection state of the
そして、本実施の形態の場合には、この医療機器2の設定操作に連動して、フットスイッチ7の操作対象として、設定変更後のどの医療機器2を設定するかを、設定登録画面40を提示して、術者に選択させる(ステップ114)。たとえば、図8は、この設定登録画面40におけるフットスイッチ設定登録メニュー42の画面の詳細例としての、フットスイッチ接続設定画面42aを示しており、選択機器入力/表示領域42bに、選択対象の医療機器2の名称等を入力させる構成となっている。 In the case of the present embodiment, the setting
そして、このフットスイッチ接続設定画面42aにて、特定の一つの医療機器2が選択されると、(ステップ115)、術者による可否入力を判別し(ステップ116)、選択結果が術者に承認された場合には、選択結果が、図9に例示されるフットスイッチ設定登録完了画面42cとして術者に提示される(ステップ117)。 When one specific
すなわち、設定登録画面40では、登録の必要な医療機器2のすべてに関する医療機器設定登録メニユー41と、フットスイッチ設定登録メニュー42と、設定終了表示43を提示し、フットスイッチ設定登録メニュー42が未完の場合には、医療機器設定登録メニユー41の操作が終了できないようになっており、医療機器2の構成変更が生じた場合には、必ず、連動して、フットスイッチ設定登録メニュー42の実行が行われ、フットスイッチ7と特定の医療機器2との接続関係(フットスイッチ接続フラグ23)が設定される。 That is, the setting
また、集中表示パネル11の一部には、現在、フットスイッチ70の操作対象として設定されている医療機器2の名称(たとえば、電気メス等)が表示される接続中医療機器名表示エリア11aが設けられており、術者は、この接続中医療機器名表示エリア11aを参照することで、その時点でフットスイッチ70の操作対象となっている医療機器2を確認することが可能になっている。 In addition, a part of the central display panel 11 includes a connected medical device
このように、本実施の形態2の場合には、コントローラ10に対する複数の医療機器2の接続構成に変化があった場合には、連動して、必ず、フットスイッチ7と医療機器2との接続関係の設定操作が実行されるので、構成変更により、コントローラ10に接続される医療機器2として、たとえば、超音波破石装置16を電気メス3に変更しても、必ず正しいフットスイッチ7の接続設定が行われるため、誤操作を防ぐことができ、操作性および操作の確実性が向上する。 As described above, in the case of the second embodiment, when there is a change in the connection configuration of the plurality of
(実施の形態3)
図10は、本発明のさらに他の実施の形態である医療システムの構成の一例を示す概念図である。この実施の形態3では、コントローラ10には、シリアル通信線8を介してハンドピース等の手術器具3aを備えた電気メス3およびハンドピース等の手術器具4aを備えた超音波手術器4が、医療機器2として、接続されている。(Embodiment 3)
FIG. 10 is a conceptual diagram showing an example of the configuration of a medical system according to still another embodiment of the present invention. In the third embodiment, the
コントローラ10に接続されるフットスイッチ70は、左ボタン71および右ボタン72を備えている。
本実施の形態の場合、左ボタン71および右ボタン72は、電気メス3または超音波手術器4における高周波エネルギーや超音波エネルギーの被術体90に対する出力のON/OFF制御に用いられるとともに、左ボタン71および右ボタン72を同時に押すことにより、電気メス3または超音波手術器4のいずれにフットスイッチ70を接続するかを選択させることが可能になっている。The
In the case of the present embodiment, the
また、フットスイッチ70が電気メス3または超音波手術器4のいずれかに接続されている場合、これらの各々の医療機器2における異なる処置のON/OFFに左ボタン71および右ボタン72を割り当てることも可能となっている。 Further, when the
すなわち、図4に例示されるように、コントローラ10のフットスイッチ設定テーブル20には、同一の医療機器2の操作において、左ボタン71および右ボタン72の各々に個別に機能を割り当てるための左ボタン機能25および右ボタン機能26が設けられている。 That is, as illustrated in FIG. 4, the foot switch setting table 20 of the
たとえば、図4の例では、超音波手術器4がフットスイッチ70の操作対象として設定されている場合、左ボタン71は、超音波出力が70%となるON/OFF操作に割り当てられ、右ボタン72は、超音波出力が100%となるON/OFF操作に割り当てられている。 For example, in the example of FIG. 4, when the ultrasonic surgical instrument 4 is set as an operation target of the
また、電気メス3がフットスイッチ70の操作対象として設定されている場合、左ボタン71は“切開”処置のON/OFFに、右ボタン72は、“凝固”処置のON/OFFに割り当てられている。 When the electric knife 3 is set as an operation target of the
また、気腹器5がフットスイッチ70の操作対象として設定されている場合、左ボタン71は“増圧”処置のON/OFFに、右ボタン72は、“減圧”処置のON/OFFに割り当てられている。 Further, when the
また、テレビカメラ6がフットスイッチ70の操作対象として設定されている場合、左ボタン71は“ズーム拡大”処置のON/OFFに、右ボタン72は、“ズーム縮小”処置のON/OFFに割り当てられている。 When the
このように、コントローラ10は、フットスイッチ設定テーブル20の左ボタン機能25および右ボタン機能26の設定を参照することで、特定の医療機器2のフットスイッチ70による制御において、術者による左ボタン71および右ボタン72の操作によって、どのような制御信号を操作対象の医療機器2に出力するかを制御する。 As described above, the
以下、本実施の形態の作用の一例について、図11のフローチャート等を参照して説明する。コントローラ10は、術者によるフットスイッチ70の押下イベントを検出すると(ステップ121)、まず、左ボタン71および右ボタン72の同時押下か判別し(ステップ122)、同時押下の場合には、フットスイッチ70を、電気メス3または超音波手術器4のいずれの医療機器2に接続するかを術者に選択させ、選択結果は、フットスイッチ接続フラグ23としてフットスイッチ設定テーブル20に設定される(ステップ125)。 Hereinafter, an example of the operation of the present embodiment will be described with reference to the flowchart of FIG. When the
また、ステップ122で同時押下でないと判定された場合は、左ボタン71の押下か判定し(ステップ123)、左ボタン71の押下と判定された場合は、当該医療機器2の左ボタン機能25に設定された機能が実現されるように、コントローラ10は操作対象の医療機器2にON/OFFの制御信号を出力する(ステップ126)。 If it is determined in
また、ステップ123で左ボタン71の押下でないと判定された場合は、反対側の右ボタン72の押下と判定して、フットスイッチ設定テーブル20の右ボタン機能26にて右ボタン72に割り当てられた機能が実現されるように、操作対象の医療機器2に対して所定のON/OFFの制御信号を出力する(ステップ124)。 If it is determined in
このように、本実施の形態の場合には、フットスイッチ70に設けられた左ボタン71および右ボタン72の両方を同時に押下した時に、出力機器(操作対象の医療機器2)の選択が切り換わる構成となっているため、フットスイッチ70に、医療機器2の選択機能を実現するためのボタンを設ける必要がなく、機能選択のためのボタンを含む多数のボタンを術者に選択させることによる誤操作の発生確率が減少するとともに、操作性および操作の確実性が向上する。 Thus, in the case of the present embodiment, when both the
また、フットスイッチ70におけるボタンの数が減少したので、部品コストの低減も実現できる。
なお、本発明は、上述の実施の形態に例示した構成に限らず、その趣旨を逸脱しない範囲で種々変更可能であることは言うまでもない。Further, since the number of buttons in the
Needless to say, the present invention is not limited to the configuration exemplified in the above-described embodiment, and various modifications can be made without departing from the spirit of the present invention.
1 医療システム
2 医療機器
3 電気メス
3a 手術器具
4 超音波手術器
4a 手術器具
5 気腹器
5a 気腹チューブ
6 テレビカメラ
6a カメラヘッド
6b モニタ
7 フットスイッチ
7a ON/OFF操作ボタン
7b 機能選択ボタン
7c 登録ボタン
8 シリアル通信線
8a コネクタ
9 フットスイッチ信号線
10 コントローラ
10a MPU
10b 主記憶
10c 不揮発メモリ
10d バス
10e 周辺機器制御部
10f システムコネクタ
10g ユーザインターフェイス制御部
10h 汎用コネクタ
10i フットスイッチ専用コネクタ
11 集中表示パネル
12 映像ケーブル
13 集中操作パネル
13a 手術開始ボタン
13b 手術終了ボタン
14 通信・映像ケーブル
15 録画装置
16 超音波破石装置
17 スピーカー
18 集中表示パネル
20 フットスイッチ設定テーブル
21 機器ID
22 機器名称
23 フットスイッチ接続フラグ
24 処置中フラグ
25 左ボタン機能
26 右ボタン機能
30 制御プログラム
40 設定登録画面
41 医療機器設定登録メニユー
42 フットスイッチ設定登録メニュー
42a フットスイッチ接続設定画面
42b 選択機器入力/表示領域
42c フットスイッチ設定登録完了画面
43 設定終了表示
70 フットスイッチ
71 左ボタン
72 右ボタン
90 被術体
DESCRIPTION OF SYMBOLS 1
10b Main memory 10c
22
Claims (13)
Translated fromJapanese前記制御装置は、
任意の前記医療機器を用いた処置中か否かを記憶する記憶手段と、
前記フットスイッチの操作対象を複数の前記医療機器の一つに選択的に設定する設定操作を行うとともに、前記処置中の場合には前記設定操作を抑止する設定制御手段と、
を含むことを特徴とする医療用システム。A medical system including a control device that controls a plurality of medical devices, and a foot switch that is provided in common to the plurality of medical devices and operates the medical devices,
The controller is
Storage means for storing whether or not a treatment using any of the medical devices is in progress;
A setting control means for performing a setting operation for selectively setting an operation target of the foot switch to one of the plurality of medical devices, and for suppressing the setting operation during the treatment,
A medical system comprising:
前記制御装置は、前記制御装置に接続される前記医療機器の構成変更に連動して、前記フットスイッチの操作対象を複数の前記医療機器の一つに選択的に設定する設定操作を行う設定制御手段を含むことを特徴とする医療用システム。A medical system including a control device that controls a plurality of medical devices, and a foot switch that is provided in common to the plurality of medical devices and operates the medical devices,
The control device performs setting operation for selectively setting an operation target of the foot switch to one of the plurality of medical devices in conjunction with a configuration change of the medical device connected to the control device. A medical system comprising means.
前記制御装置は、複数の前記操作ボタンの同時押下によって、前記フットスイッチの操作対象を複数の前記医療機器の一つに選択的に設定する設定操作を行う設定制御手段を含むことを特徴とする医療用システム。A medical system comprising: a control device that controls a plurality of medical devices; and a foot switch that is provided in common to the plurality of medical devices and includes a plurality of operation buttons that operate the medical devices,
The control device includes setting control means for performing a setting operation for selectively setting an operation target of the foot switch to one of the plurality of medical devices by simultaneously pressing a plurality of the operation buttons. Medical system.
前記医療機器を用いた処置中は、前記フットスイッチの操作対象の設定操作を抑止することを特徴とする医療用システムの制御方法。A control method for a medical system, wherein a foot switch is connected to a control device that centrally controls a plurality of medical devices, and the medical device to be operated by the foot switch is switched and controlled.
A control method for a medical system, wherein a setting operation of an operation target of the foot switch is suppressed during a treatment using the medical device.
前記制御装置に対する前記医療機器の接続構成の変化に連動して、前記フットスイッチの操作対象となる前記医療機器の設定を実行することを特徴とする医療用システムの制御方法。A control method for a medical system, wherein a foot switch is connected to a control device that centrally controls a plurality of medical devices, and the medical device to be operated by the foot switch is switched and controlled.
A control method for a medical system, wherein the setting of the medical device to be operated by the foot switch is executed in conjunction with a change in the connection configuration of the medical device with respect to the control device.
複数の前記操作ボタンの同時押下により前記フットスイッチによる操作対象の前記医療機器の切り替えを行うことを特徴とする医療用システムの制御方法。A control method for a medical system in which a foot switch having a plurality of operation buttons is connected to a control device that centrally controls a plurality of medical devices, and the medical device to be operated by the foot switch is switched and controlled.
A medical system control method, wherein the medical device to be operated is switched by the foot switch by simultaneously pressing a plurality of the operation buttons.
13. The medical system control method according to claim 12, wherein the foot switch is provided with two operation buttons, and each of the two operation buttons is executed by the medical device assigned to the foot switch as an operation target. A control method for a medical system, which is used for controlling output start and output stop of the energy in each of a plurality of treatments.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004268468AJP2006081664A (en) | 2004-09-15 | 2004-09-15 | Medical system and method for controlling medical system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004268468AJP2006081664A (en) | 2004-09-15 | 2004-09-15 | Medical system and method for controlling medical system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006081664Atrue JP2006081664A (en) | 2006-03-30 |
Family
ID=36160624
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004268468AWithdrawnJP2006081664A (en) | 2004-09-15 | 2004-09-15 | Medical system and method for controlling medical system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006081664A (en) |
Cited By (86)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011200516A (en)* | 2010-03-26 | 2011-10-13 | Osada Res Inst Ltd | Dental treatment unit |
| JP2013078585A (en)* | 2011-10-03 | 2013-05-02 | Ethicon Endo Surgery Inc | Surgical generator for ultrasonic and electrosurgical device |
| WO2017056747A1 (en)* | 2015-10-02 | 2017-04-06 | ソニー株式会社 | Medical control device, control method and program |
| WO2017094363A1 (en)* | 2015-11-30 | 2017-06-08 | オリンパス株式会社 | Centralized control apparatus |
| US10251664B2 (en) | 2016-01-15 | 2019-04-09 | Ethicon Llc | Modular battery powered handheld surgical instrument with multi-function motor via shifting gear assembly |
| US10278721B2 (en) | 2010-07-22 | 2019-05-07 | Ethicon Llc | Electrosurgical instrument with separate closure and cutting members |
| US10285724B2 (en) | 2014-07-31 | 2019-05-14 | Ethicon Llc | Actuation mechanisms and load adjustment assemblies for surgical instruments |
| US10299810B2 (en) | 2010-02-11 | 2019-05-28 | Ethicon Llc | Rotatable cutting implements with friction reducing material for ultrasonic surgical instruments |
| US10335182B2 (en) | 2012-06-29 | 2019-07-02 | Ethicon Llc | Surgical instruments with articulating shafts |
| US10335614B2 (en) | 2008-08-06 | 2019-07-02 | Ethicon Llc | Devices and techniques for cutting and coagulating tissue |
| US10335183B2 (en) | 2012-06-29 | 2019-07-02 | Ethicon Llc | Feedback devices for surgical control systems |
| US10342602B2 (en) | 2015-03-17 | 2019-07-09 | Ethicon Llc | Managing tissue treatment |
| US10349999B2 (en) | 2014-03-31 | 2019-07-16 | Ethicon Llc | Controlling impedance rise in electrosurgical medical devices |
| US10376305B2 (en) | 2016-08-05 | 2019-08-13 | Ethicon Llc | Methods and systems for advanced harmonic energy |
| US10433900B2 (en) | 2011-07-22 | 2019-10-08 | Ethicon Llc | Surgical instruments for tensioning tissue |
| US10441310B2 (en) | 2012-06-29 | 2019-10-15 | Ethicon Llc | Surgical instruments with curved section |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| US10463421B2 (en) | 2014-03-27 | 2019-11-05 | Ethicon Llc | Two stage trigger, clamp and cut bipolar vessel sealer |
| US10485607B2 (en) | 2016-04-29 | 2019-11-26 | Ethicon Llc | Jaw structure with distal closure for electrosurgical instruments |
| US10517627B2 (en) | 2012-04-09 | 2019-12-31 | Ethicon Llc | Switch arrangements for ultrasonic surgical instruments |
| US10524854B2 (en) | 2010-07-23 | 2020-01-07 | Ethicon Llc | Surgical instrument |
| US10524872B2 (en) | 2012-06-29 | 2020-01-07 | Ethicon Llc | Closed feedback control for electrosurgical device |
| US10543008B2 (en) | 2012-06-29 | 2020-01-28 | Ethicon Llc | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| US10555769B2 (en) | 2016-02-22 | 2020-02-11 | Ethicon Llc | Flexible circuits for electrosurgical instrument |
| US10575892B2 (en) | 2015-12-31 | 2020-03-03 | Ethicon Llc | Adapter for electrical surgical instruments |
| US10595929B2 (en) | 2015-03-24 | 2020-03-24 | Ethicon Llc | Surgical instruments with firing system overload protection mechanisms |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| US10610286B2 (en) | 2015-09-30 | 2020-04-07 | Ethicon Llc | Techniques for circuit topologies for combined generator |
| US10639092B2 (en) | 2014-12-08 | 2020-05-05 | Ethicon Llc | Electrode configurations for surgical instruments |
| US10646269B2 (en) | 2016-04-29 | 2020-05-12 | Ethicon Llc | Non-linear jaw gap for electrosurgical instruments |
| US10688321B2 (en) | 2009-07-15 | 2020-06-23 | Ethicon Llc | Ultrasonic surgical instruments |
| US10702329B2 (en) | 2016-04-29 | 2020-07-07 | Ethicon Llc | Jaw structure with distal post for electrosurgical instruments |
| US10716615B2 (en) | 2016-01-15 | 2020-07-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with curved end effectors having asymmetric engagement between jaw and blade |
| US10729494B2 (en) | 2012-02-10 | 2020-08-04 | Ethicon Llc | Robotically controlled surgical instrument |
| US10765470B2 (en) | 2015-06-30 | 2020-09-08 | Ethicon Llc | Surgical system with user adaptable techniques employing simultaneous energy modalities based on tissue parameters |
| US10779879B2 (en) | 2014-03-18 | 2020-09-22 | Ethicon Llc | Detecting short circuits in electrosurgical medical devices |
| US10779845B2 (en) | 2012-06-29 | 2020-09-22 | Ethicon Llc | Ultrasonic surgical instruments with distally positioned transducers |
| US10835307B2 (en) | 2001-06-12 | 2020-11-17 | Ethicon Llc | Modular battery powered handheld surgical instrument containing elongated multi-layered shaft |
| US10856929B2 (en) | 2014-01-07 | 2020-12-08 | Ethicon Llc | Harvesting energy from a surgical generator |
| US10881449B2 (en) | 2012-09-28 | 2021-01-05 | Ethicon Llc | Multi-function bi-polar forceps |
| US10898256B2 (en) | 2015-06-30 | 2021-01-26 | Ethicon Llc | Surgical system with user adaptable techniques based on tissue impedance |
| US10912580B2 (en) | 2013-12-16 | 2021-02-09 | Ethicon Llc | Medical device |
| US10912603B2 (en) | 2013-11-08 | 2021-02-09 | Ethicon Llc | Electrosurgical devices |
| US10925659B2 (en) | 2013-09-13 | 2021-02-23 | Ethicon Llc | Electrosurgical (RF) medical instruments for cutting and coagulating tissue |
| US10952788B2 (en) | 2015-06-30 | 2021-03-23 | Ethicon Llc | Surgical instrument with user adaptable algorithms |
| US10987123B2 (en) | 2012-06-28 | 2021-04-27 | Ethicon Llc | Surgical instruments with articulating shafts |
| US10993763B2 (en) | 2012-06-29 | 2021-05-04 | Ethicon Llc | Lockout mechanism for use with robotic electrosurgical device |
| US11051873B2 (en) | 2015-06-30 | 2021-07-06 | Cilag Gmbh International | Surgical system with user adaptable techniques employing multiple energy modalities based on tissue parameters |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US11129670B2 (en) | 2016-01-15 | 2021-09-28 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| US11129669B2 (en) | 2015-06-30 | 2021-09-28 | Cilag Gmbh International | Surgical system with user adaptable techniques based on tissue type |
| US11179173B2 (en) | 2012-10-22 | 2021-11-23 | Cilag Gmbh International | Surgical instrument |
| CN113877074A (en)* | 2020-07-03 | 2022-01-04 | 中硼(厦门)医疗器械有限公司 | Neutron capture therapy device |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US11266430B2 (en) | 2016-11-29 | 2022-03-08 | Cilag Gmbh International | End effector control and calibration |
| US11311326B2 (en) | 2015-02-06 | 2022-04-26 | Cilag Gmbh International | Electrosurgical instrument with rotation and articulation mechanisms |
| US11324527B2 (en) | 2012-11-15 | 2022-05-10 | Cilag Gmbh International | Ultrasonic and electrosurgical devices |
| US11337747B2 (en) | 2014-04-15 | 2022-05-24 | Cilag Gmbh International | Software algorithms for electrosurgical instruments |
| US11399855B2 (en) | 2014-03-27 | 2022-08-02 | Cilag Gmbh International | Electrosurgical devices |
| US11452525B2 (en) | 2019-12-30 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising an adjustment system |
| US11589916B2 (en) | 2019-12-30 | 2023-02-28 | Cilag Gmbh International | Electrosurgical instruments with electrodes having variable energy densities |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US11684412B2 (en) | 2019-12-30 | 2023-06-27 | Cilag Gmbh International | Surgical instrument with rotatable and articulatable surgical end effector |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US11723716B2 (en) | 2019-12-30 | 2023-08-15 | Cilag Gmbh International | Electrosurgical instrument with variable control mechanisms |
| US11759251B2 (en) | 2019-12-30 | 2023-09-19 | Cilag Gmbh International | Control program adaptation based on device status and user input |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11911063B2 (en) | 2019-12-30 | 2024-02-27 | Cilag Gmbh International | Techniques for detecting ultrasonic blade to electrode contact and reducing power to ultrasonic blade |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US11937866B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Method for an electrosurgical procedure |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11986201B2 (en) | 2019-12-30 | 2024-05-21 | Cilag Gmbh International | Method for operating a surgical instrument |
| US12023086B2 (en) | 2019-12-30 | 2024-07-02 | Cilag Gmbh International | Electrosurgical instrument for delivering blended energy modalities to tissue |
| US12053224B2 (en) | 2019-12-30 | 2024-08-06 | Cilag Gmbh International | Variation in electrode parameters and deflectable electrode to modify energy density and tissue interaction |
| US12064109B2 (en) | 2019-12-30 | 2024-08-20 | Cilag Gmbh International | Surgical instrument comprising a feedback control circuit |
| US12076006B2 (en) | 2019-12-30 | 2024-09-03 | Cilag Gmbh International | Surgical instrument comprising an orientation detection system |
| US12082808B2 (en) | 2019-12-30 | 2024-09-10 | Cilag Gmbh International | Surgical instrument comprising a control system responsive to software configurations |
| US12114912B2 (en) | 2019-12-30 | 2024-10-15 | Cilag Gmbh International | Non-biased deflectable electrode to minimize contact between ultrasonic blade and electrode |
| US12193698B2 (en) | 2016-01-15 | 2025-01-14 | Cilag Gmbh International | Method for self-diagnosing operation of a control switch in a surgical instrument system |
| US12262937B2 (en) | 2019-12-30 | 2025-04-01 | Cilag Gmbh International | User interface for surgical instrument with combination energy modality end-effector |
| US12336747B2 (en) | 2019-12-30 | 2025-06-24 | Cilag Gmbh International | Method of operating a combination ultrasonic / bipolar RF surgical device with a combination energy modality end-effector |
| US12343063B2 (en) | 2019-12-30 | 2025-07-01 | Cilag Gmbh International | Multi-layer clamp arm pad for enhanced versatility and performance of a surgical device |
- 2004
- 2004-09-15JPJP2004268468Apatent/JP2006081664A/ennot_activeWithdrawn
Cited By (146)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10835307B2 (en) | 2001-06-12 | 2020-11-17 | Ethicon Llc | Modular battery powered handheld surgical instrument containing elongated multi-layered shaft |
| US11229472B2 (en) | 2001-06-12 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with multiple magnetic position sensors |
| US10335614B2 (en) | 2008-08-06 | 2019-07-02 | Ethicon Llc | Devices and techniques for cutting and coagulating tissue |
| US11890491B2 (en) | 2008-08-06 | 2024-02-06 | Cilag Gmbh International | Devices and techniques for cutting and coagulating tissue |
| US10688321B2 (en) | 2009-07-15 | 2020-06-23 | Ethicon Llc | Ultrasonic surgical instruments |
| US11717706B2 (en) | 2009-07-15 | 2023-08-08 | Cilag Gmbh International | Ultrasonic surgical instruments |
| US12408967B2 (en) | 2009-10-09 | 2025-09-09 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US11871982B2 (en) | 2009-10-09 | 2024-01-16 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US10441345B2 (en) | 2009-10-09 | 2019-10-15 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US10299810B2 (en) | 2010-02-11 | 2019-05-28 | Ethicon Llc | Rotatable cutting implements with friction reducing material for ultrasonic surgical instruments |
| US11382642B2 (en) | 2010-02-11 | 2022-07-12 | Cilag Gmbh International | Rotatable cutting implements with friction reducing material for ultrasonic surgical instruments |
| JP2011200516A (en)* | 2010-03-26 | 2011-10-13 | Osada Res Inst Ltd | Dental treatment unit |
| US10278721B2 (en) | 2010-07-22 | 2019-05-07 | Ethicon Llc | Electrosurgical instrument with separate closure and cutting members |
| US10524854B2 (en) | 2010-07-23 | 2020-01-07 | Ethicon Llc | Surgical instrument |
| US10433900B2 (en) | 2011-07-22 | 2019-10-08 | Ethicon Llc | Surgical instruments for tensioning tissue |
| JP2013078585A (en)* | 2011-10-03 | 2013-05-02 | Ethicon Endo Surgery Inc | Surgical generator for ultrasonic and electrosurgical device |
| US10729494B2 (en) | 2012-02-10 | 2020-08-04 | Ethicon Llc | Robotically controlled surgical instrument |
| US10517627B2 (en) | 2012-04-09 | 2019-12-31 | Ethicon Llc | Switch arrangements for ultrasonic surgical instruments |
| US11419626B2 (en) | 2012-04-09 | 2022-08-23 | Cilag Gmbh International | Switch arrangements for ultrasonic surgical instruments |
| US12167866B2 (en) | 2012-04-09 | 2024-12-17 | Cilag Gmbh International | Switch arrangements for ultrasonic surgical instruments |
| US10987123B2 (en) | 2012-06-28 | 2021-04-27 | Ethicon Llc | Surgical instruments with articulating shafts |
| US11426191B2 (en) | 2012-06-29 | 2022-08-30 | Cilag Gmbh International | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| US11096752B2 (en) | 2012-06-29 | 2021-08-24 | Cilag Gmbh International | Closed feedback control for electrosurgical device |
| US10524872B2 (en) | 2012-06-29 | 2020-01-07 | Ethicon Llc | Closed feedback control for electrosurgical device |
| US11717311B2 (en) | 2012-06-29 | 2023-08-08 | Cilag Gmbh International | Surgical instruments with articulating shafts |
| US10543008B2 (en) | 2012-06-29 | 2020-01-28 | Ethicon Llc | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| US11583306B2 (en) | 2012-06-29 | 2023-02-21 | Cilag Gmbh International | Surgical instruments with articulating shafts |
| US10779845B2 (en) | 2012-06-29 | 2020-09-22 | Ethicon Llc | Ultrasonic surgical instruments with distally positioned transducers |
| US12268408B2 (en) | 2012-06-29 | 2025-04-08 | Cilag Gmbh International | Haptic feedback devices for surgical robot |
| US10993763B2 (en) | 2012-06-29 | 2021-05-04 | Ethicon Llc | Lockout mechanism for use with robotic electrosurgical device |
| US10441310B2 (en) | 2012-06-29 | 2019-10-15 | Ethicon Llc | Surgical instruments with curved section |
| US10335182B2 (en) | 2012-06-29 | 2019-07-02 | Ethicon Llc | Surgical instruments with articulating shafts |
| US10966747B2 (en) | 2012-06-29 | 2021-04-06 | Ethicon Llc | Haptic feedback devices for surgical robot |
| US10335183B2 (en) | 2012-06-29 | 2019-07-02 | Ethicon Llc | Feedback devices for surgical control systems |
| US11871955B2 (en) | 2012-06-29 | 2024-01-16 | Cilag Gmbh International | Surgical instruments with articulating shafts |
| US10881449B2 (en) | 2012-09-28 | 2021-01-05 | Ethicon Llc | Multi-function bi-polar forceps |
| US11179173B2 (en) | 2012-10-22 | 2021-11-23 | Cilag Gmbh International | Surgical instrument |
| US11324527B2 (en) | 2012-11-15 | 2022-05-10 | Cilag Gmbh International | Ultrasonic and electrosurgical devices |
| US10925659B2 (en) | 2013-09-13 | 2021-02-23 | Ethicon Llc | Electrosurgical (RF) medical instruments for cutting and coagulating tissue |
| US10912603B2 (en) | 2013-11-08 | 2021-02-09 | Ethicon Llc | Electrosurgical devices |
| US10912580B2 (en) | 2013-12-16 | 2021-02-09 | Ethicon Llc | Medical device |
| US10856929B2 (en) | 2014-01-07 | 2020-12-08 | Ethicon Llc | Harvesting energy from a surgical generator |
| US10932847B2 (en) | 2014-03-18 | 2021-03-02 | Ethicon Llc | Detecting short circuits in electrosurgical medical devices |
| US10779879B2 (en) | 2014-03-18 | 2020-09-22 | Ethicon Llc | Detecting short circuits in electrosurgical medical devices |
| US11399855B2 (en) | 2014-03-27 | 2022-08-02 | Cilag Gmbh International | Electrosurgical devices |
| US10463421B2 (en) | 2014-03-27 | 2019-11-05 | Ethicon Llc | Two stage trigger, clamp and cut bipolar vessel sealer |
| US11471209B2 (en) | 2014-03-31 | 2022-10-18 | Cilag Gmbh International | Controlling impedance rise in electrosurgical medical devices |
| US10349999B2 (en) | 2014-03-31 | 2019-07-16 | Ethicon Llc | Controlling impedance rise in electrosurgical medical devices |
| US11337747B2 (en) | 2014-04-15 | 2022-05-24 | Cilag Gmbh International | Software algorithms for electrosurgical instruments |
| US11413060B2 (en) | 2014-07-31 | 2022-08-16 | Cilag Gmbh International | Actuation mechanisms and load adjustment assemblies for surgical instruments |
| US10285724B2 (en) | 2014-07-31 | 2019-05-14 | Ethicon Llc | Actuation mechanisms and load adjustment assemblies for surgical instruments |
| US10639092B2 (en) | 2014-12-08 | 2020-05-05 | Ethicon Llc | Electrode configurations for surgical instruments |
| US11311326B2 (en) | 2015-02-06 | 2022-04-26 | Cilag Gmbh International | Electrosurgical instrument with rotation and articulation mechanisms |
| US10342602B2 (en) | 2015-03-17 | 2019-07-09 | Ethicon Llc | Managing tissue treatment |
| US10595929B2 (en) | 2015-03-24 | 2020-03-24 | Ethicon Llc | Surgical instruments with firing system overload protection mechanisms |
| US10898256B2 (en) | 2015-06-30 | 2021-01-26 | Ethicon Llc | Surgical system with user adaptable techniques based on tissue impedance |
| US11129669B2 (en) | 2015-06-30 | 2021-09-28 | Cilag Gmbh International | Surgical system with user adaptable techniques based on tissue type |
| US11141213B2 (en) | 2015-06-30 | 2021-10-12 | Cilag Gmbh International | Surgical instrument with user adaptable techniques |
| US10765470B2 (en) | 2015-06-30 | 2020-09-08 | Ethicon Llc | Surgical system with user adaptable techniques employing simultaneous energy modalities based on tissue parameters |
| US10952788B2 (en) | 2015-06-30 | 2021-03-23 | Ethicon Llc | Surgical instrument with user adaptable algorithms |
| US11903634B2 (en) | 2015-06-30 | 2024-02-20 | Cilag Gmbh International | Surgical instrument with user adaptable techniques |
| US11051873B2 (en) | 2015-06-30 | 2021-07-06 | Cilag Gmbh International | Surgical system with user adaptable techniques employing multiple energy modalities based on tissue parameters |
| US10687884B2 (en) | 2015-09-30 | 2020-06-23 | Ethicon Llc | Circuits for supplying isolated direct current (DC) voltage to surgical instruments |
| US11058475B2 (en) | 2015-09-30 | 2021-07-13 | Cilag Gmbh International | Method and apparatus for selecting operations of a surgical instrument based on user intention |
| US11766287B2 (en) | 2015-09-30 | 2023-09-26 | Cilag Gmbh International | Methods for operating generator for digitally generating electrical signal waveforms and surgical instruments |
| US11033322B2 (en) | 2015-09-30 | 2021-06-15 | Ethicon Llc | Circuit topologies for combined generator |
| US10751108B2 (en) | 2015-09-30 | 2020-08-25 | Ethicon Llc | Protection techniques for generator for digitally generating electrosurgical and ultrasonic electrical signal waveforms |
| US10736685B2 (en) | 2015-09-30 | 2020-08-11 | Ethicon Llc | Generator for digitally generating combined electrical signal waveforms for ultrasonic surgical instruments |
| US10624691B2 (en) | 2015-09-30 | 2020-04-21 | Ethicon Llc | Techniques for operating generator for digitally generating electrical signal waveforms and surgical instruments |
| US11559347B2 (en) | 2015-09-30 | 2023-01-24 | Cilag Gmbh International | Techniques for circuit topologies for combined generator |
| US10610286B2 (en) | 2015-09-30 | 2020-04-07 | Ethicon Llc | Techniques for circuit topologies for combined generator |
| WO2017056747A1 (en)* | 2015-10-02 | 2017-04-06 | ソニー株式会社 | Medical control device, control method and program |
| JPWO2017056747A1 (en)* | 2015-10-02 | 2018-07-19 | ソニー株式会社 | Medical control device, control method, and program |
| US11666375B2 (en) | 2015-10-16 | 2023-06-06 | Cilag Gmbh International | Electrode wiping surgical device |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| WO2017094363A1 (en)* | 2015-11-30 | 2017-06-08 | オリンパス株式会社 | Centralized control apparatus |
| US10973593B2 (en) | 2015-11-30 | 2021-04-13 | Olympus Corporation | Centralized control apparatus |
| US10575892B2 (en) | 2015-12-31 | 2020-03-03 | Ethicon Llc | Adapter for electrical surgical instruments |
| US11229450B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with motor drive |
| US11751929B2 (en) | 2016-01-15 | 2023-09-12 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US10716615B2 (en) | 2016-01-15 | 2020-07-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with curved end effectors having asymmetric engagement between jaw and blade |
| US10709469B2 (en) | 2016-01-15 | 2020-07-14 | Ethicon Llc | Modular battery powered handheld surgical instrument with energy conservation techniques |
| US10299821B2 (en) | 2016-01-15 | 2019-05-28 | Ethicon Llc | Modular battery powered handheld surgical instrument with motor control limit profile |
| US11896280B2 (en) | 2016-01-15 | 2024-02-13 | Cilag Gmbh International | Clamp arm comprising a circuit |
| US10251664B2 (en) | 2016-01-15 | 2019-04-09 | Ethicon Llc | Modular battery powered handheld surgical instrument with multi-function motor via shifting gear assembly |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US11974772B2 (en) | 2016-01-15 | 2024-05-07 | Cilag GmbH Intemational | Modular battery powered handheld surgical instrument with variable motor control limits |
| US11058448B2 (en) | 2016-01-15 | 2021-07-13 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with multistage generator circuits |
| US12402906B2 (en) | 2016-01-15 | 2025-09-02 | Cilag Gmbh International | Modular battery powered handheld surgical instrument and methods therefor |
| US10779849B2 (en) | 2016-01-15 | 2020-09-22 | Ethicon Llc | Modular battery powered handheld surgical instrument with voltage sag resistant battery pack |
| US10828058B2 (en) | 2016-01-15 | 2020-11-10 | Ethicon Llc | Modular battery powered handheld surgical instrument with motor control limits based on tissue characterization |
| US11051840B2 (en) | 2016-01-15 | 2021-07-06 | Ethicon Llc | Modular battery powered handheld surgical instrument with reusable asymmetric handle housing |
| US11134978B2 (en) | 2016-01-15 | 2021-10-05 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with self-diagnosing control switches for reusable handle assembly |
| US12239360B2 (en) | 2016-01-15 | 2025-03-04 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| US10842523B2 (en) | 2016-01-15 | 2020-11-24 | Ethicon Llc | Modular battery powered handheld surgical instrument and methods therefor |
| US11684402B2 (en) | 2016-01-15 | 2023-06-27 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US12201339B2 (en) | 2016-01-15 | 2025-01-21 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US12193698B2 (en) | 2016-01-15 | 2025-01-14 | Cilag Gmbh International | Method for self-diagnosing operation of a control switch in a surgical instrument system |
| US11129670B2 (en) | 2016-01-15 | 2021-09-28 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| US10537351B2 (en) | 2016-01-15 | 2020-01-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with variable motor control limits |
| US10555769B2 (en) | 2016-02-22 | 2020-02-11 | Ethicon Llc | Flexible circuits for electrosurgical instrument |
| US11202670B2 (en) | 2016-02-22 | 2021-12-21 | Cilag Gmbh International | Method of manufacturing a flexible circuit electrode for electrosurgical instrument |
| US10485607B2 (en) | 2016-04-29 | 2019-11-26 | Ethicon Llc | Jaw structure with distal closure for electrosurgical instruments |
| US10646269B2 (en) | 2016-04-29 | 2020-05-12 | Ethicon Llc | Non-linear jaw gap for electrosurgical instruments |
| US10702329B2 (en) | 2016-04-29 | 2020-07-07 | Ethicon Llc | Jaw structure with distal post for electrosurgical instruments |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| US11864820B2 (en) | 2016-05-03 | 2024-01-09 | Cilag Gmbh International | Medical device with a bilateral jaw configuration for nerve stimulation |
| US12114914B2 (en) | 2016-08-05 | 2024-10-15 | Cilag Gmbh International | Methods and systems for advanced harmonic energy |
| US11344362B2 (en) | 2016-08-05 | 2022-05-31 | Cilag Gmbh International | Methods and systems for advanced harmonic energy |
| US10376305B2 (en) | 2016-08-05 | 2019-08-13 | Ethicon Llc | Methods and systems for advanced harmonic energy |
| US11266430B2 (en) | 2016-11-29 | 2022-03-08 | Cilag Gmbh International | End effector control and calibration |
| US11998230B2 (en) | 2016-11-29 | 2024-06-04 | Cilag Gmbh International | End effector control and calibration |
| US11744636B2 (en) | 2019-12-30 | 2023-09-05 | Cilag Gmbh International | Electrosurgical systems with integrated and external power sources |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US11786294B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Control program for modular combination energy device |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US11911063B2 (en) | 2019-12-30 | 2024-02-27 | Cilag Gmbh International | Techniques for detecting ultrasonic blade to electrode contact and reducing power to ultrasonic blade |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US11937866B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Method for an electrosurgical procedure |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US11974801B2 (en) | 2019-12-30 | 2024-05-07 | Cilag Gmbh International | Electrosurgical instrument with flexible wiring assemblies |
| US11986234B2 (en) | 2019-12-30 | 2024-05-21 | Cilag Gmbh International | Surgical system communication pathways |
| US11986201B2 (en) | 2019-12-30 | 2024-05-21 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11759251B2 (en) | 2019-12-30 | 2023-09-19 | Cilag Gmbh International | Control program adaptation based on device status and user input |
| US12023086B2 (en) | 2019-12-30 | 2024-07-02 | Cilag Gmbh International | Electrosurgical instrument for delivering blended energy modalities to tissue |
| US12053224B2 (en) | 2019-12-30 | 2024-08-06 | Cilag Gmbh International | Variation in electrode parameters and deflectable electrode to modify energy density and tissue interaction |
| US12064109B2 (en) | 2019-12-30 | 2024-08-20 | Cilag Gmbh International | Surgical instrument comprising a feedback control circuit |
| US12076006B2 (en) | 2019-12-30 | 2024-09-03 | Cilag Gmbh International | Surgical instrument comprising an orientation detection system |
| US12082808B2 (en) | 2019-12-30 | 2024-09-10 | Cilag Gmbh International | Surgical instrument comprising a control system responsive to software configurations |
| US11723716B2 (en) | 2019-12-30 | 2023-08-15 | Cilag Gmbh International | Electrosurgical instrument with variable control mechanisms |
| US12114912B2 (en) | 2019-12-30 | 2024-10-15 | Cilag Gmbh International | Non-biased deflectable electrode to minimize contact between ultrasonic blade and electrode |
| US11707318B2 (en) | 2019-12-30 | 2023-07-25 | Cilag Gmbh International | Surgical instrument with jaw alignment features |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US11684412B2 (en) | 2019-12-30 | 2023-06-27 | Cilag Gmbh International | Surgical instrument with rotatable and articulatable surgical end effector |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US12262937B2 (en) | 2019-12-30 | 2025-04-01 | Cilag Gmbh International | User interface for surgical instrument with combination energy modality end-effector |
| US11589916B2 (en) | 2019-12-30 | 2023-02-28 | Cilag Gmbh International | Electrosurgical instruments with electrodes having variable energy densities |
| US12336747B2 (en) | 2019-12-30 | 2025-06-24 | Cilag Gmbh International | Method of operating a combination ultrasonic / bipolar RF surgical device with a combination energy modality end-effector |
| US12343063B2 (en) | 2019-12-30 | 2025-07-01 | Cilag Gmbh International | Multi-layer clamp arm pad for enhanced versatility and performance of a surgical device |
| US12349961B2 (en) | 2019-12-30 | 2025-07-08 | Cilag Gmbh International | Electrosurgical instrument with electrodes operable in bipolar and monopolar modes |
| US11452525B2 (en) | 2019-12-30 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising an adjustment system |
| CN113877074A (en)* | 2020-07-03 | 2022-01-04 | 中硼(厦门)医疗器械有限公司 | Neutron capture therapy device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006081664A (en) | Medical system and method for controlling medical system | |
| JP4813349B2 (en) | Endoscope system | |
| JP2006068396A (en) | Medical system and control method for the same | |
| JP4643510B2 (en) | Surgical system control device and surgical device timeout value setting method | |
| JP5945644B1 (en) | Medical system | |
| JP4129313B2 (en) | Medical system control device | |
| JP5160025B2 (en) | Surgery system | |
| JP6901590B2 (en) | How to operate a centralized control device that controls one or more controlled devices including a centralized control device and medical devices | |
| WO2017094363A1 (en) | Centralized control apparatus | |
| JP2004113805A (en) | Control method for surgery system | |
| JP5010778B2 (en) | Endoscopic surgery system | |
| JP2003164412A (en) | Control system | |
| JP2006081665A (en) | Medical system and method for controlling medical system | |
| JP3725808B2 (en) | Medical device control device | |
| WO2005084525A1 (en) | Image processing device | |
| JP2006000537A (en) | Endoscope system | |
| US12251076B2 (en) | Central control apparatus, central control system, and control method for controlled devices | |
| JP2001293005A (en) | Device for energy endo-therapy accessories energy treating device equipment | |
| JP2003084791A (en) | Voice control system | |
| JP2005143918A (en) | Remote operation support system | |
| JP2004313341A (en) | Medical device system | |
| JP2003339736A (en) | Medical control system | |
| JP2006288956A (en) | Surgery system | |
| JP4839048B2 (en) | Surgery control system | |
| JP2004121613A (en) | Medical controlling device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination | Free format text:JAPANESE INTERMEDIATE CODE: A300 Effective date:20071204 |