JP2005217883A - ステレオ画像を用いた道路平面領域並びに障害物検出方法 - Google Patents
ステレオ画像を用いた道路平面領域並びに障害物検出方法Download PDFInfo
- Publication number
- JP2005217883A JP2005217883AJP2004023493AJP2004023493AJP2005217883AJP 2005217883 AJP2005217883 AJP 2005217883AJP 2004023493 AJP2004023493 AJP 2004023493AJP 2004023493 AJP2004023493 AJP 2004023493AJP 2005217883 AJP2005217883 AJP 2005217883A
- Authority
- JP
- Japan
- Prior art keywords
- image
- plane
- area
- road
- stereo
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription52
- 239000011159matrix materialSubstances0.000claimsabstractdescription66
- 230000009466transformationEffects0.000claimsabstractdescription63
- 238000001514detection methodMethods0.000claimsdescription31
- 230000003287optical effectEffects0.000claimsdescription24
- 238000003384imaging methodMethods0.000claimsdescription4
- 238000009499grossingMethods0.000claimsdescription3
- 238000012545processingMethods0.000description25
- 238000000605extractionMethods0.000description14
- 238000004364calculation methodMethods0.000description10
- 238000010586diagramMethods0.000description8
- 238000006243chemical reactionMethods0.000description4
- 238000005259measurementMethods0.000description3
- 230000000007visual effectEffects0.000description3
- 238000013459approachMethods0.000description2
- 238000013473artificial intelligenceMethods0.000description2
- 150000001875compoundsChemical class0.000description2
- 230000008602contractionEffects0.000description2
- 238000000354decomposition reactionMethods0.000description2
- 230000000694effectsEffects0.000description2
- 238000003909pattern recognitionMethods0.000description2
- 238000011160researchMethods0.000description2
- 238000013519translationMethods0.000description2
- 238000012935AveragingMethods0.000description1
- 241001609030Brosme brosmeSpecies0.000description1
- 238000004040coloringMethods0.000description1
- 238000011156evaluationMethods0.000description1
- 238000013507mappingMethods0.000description1
- 238000005457optimizationMethods0.000description1
- 239000003973paintSubstances0.000description1
- 238000000926separation methodMethods0.000description1
- 230000002194synthesizing effectEffects0.000description1
- 230000001131transforming effectEffects0.000description1
- 230000007704transitionEffects0.000description1
Images























Landscapes
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Abstract
Description
ルオン・キュー.−ティー(Luong,Q.-T),ウェーバー・ジェイ(Weber,J),(コラー・ディー(Koller,D),マリク・ジェイ(Malik,J)共著、「インテグレイティッド・ステレオ・ベイスド・アプローチ・トゥー・オートマティック・ビークル・ガイダンス(An Integrated stereo-based approach to automatic vehicle guidance)」、1995年、プロシジァー.アイ・シー・シー・ブイ(Proc. ICCV)、p.52−57オノグチ・ケイ(Onoguchi,K),タケダ・エヌ(Takeda,N),ワタナベ・エム(Watanabe,M)共著、「プランナー・プロジェクション・ステレオプシス・メソッド・フォア・ロード・エクストラクション(Planar Projection Stereopsis Method for Road Extraction)」、1995年、プロシジァー.アイ・アール・オー・エス(Proc.IROS)、p.249−256ストールヨハン・ケイ(Storjohann,K),ジールケ・ティー(Zielke,T),マロット・エイチ(Mallot,H),フォンシーレン・ダブリュー(Vonseelen,W)共著、「ビジュアル・オブスタクル・ディテクション・フォア・オートマティカリー・ガイディッド・ビークル(Visual Obstacle Detection for Automatically Guided Vehicles)、1990年、プロシジァー.アイ・シー・アール・エイ(Proc.ICRA)、p.716−766シエ・エム(Xie,M)著、「マッチング・フリー・ステレオ・ビジョン・フォア・ディテクティング・オブスタクル・オン・グランド・プレイン,マシン・ビジョン・アンド・アプリケーション(Matching free stereo vision for detecting obstacles on a ground plane,Machine Vision and Application)、1996年、ボリューム9.ナンバー1(Vol.9,No.1)、p.9−13ホイング−ヤング・シャム(Heung-Yeung Shum)、リチャード・セーリスキ(Richard Szeliski),「"パノラミック・イメージ・モザイク"テクニカル・レポート"Panoramic Image Mosaics"」,Technical report」、1997年、エム・エス・アール−ティー・アール−97−23,マイクロソフト・リサーチ(MSR-TR-97-23,Microsoft Research)オー・ディー・フォーゲラス(O.D.Faugeras),エフ・ラスマン(F.Lustman)共著、「"モーション・アンド・ストラクチャー・フロム・モーション・イン・ピースワイズ・プランナー・エンバイアロンメント"("Motion and Structure from Motion In A Piecewise Planar Environment")、1998年、プロシジァー.インターナショナル・ジャーナル・オブ・パターン・レコグニション・アンド・アーティフィシャル・インテリジェンス,ボリューム1.2,ナンバー3(Proc. International Journal of Pattern Recognition and Artificial Intelligence,Vol.2,No.3),p458−508

<ステップS100>道路面に対する射影変換行列を動的に推定する
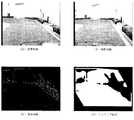
まず、自動車に搭載される2台のステレオカメラで撮影されて入力されたステレオ画像に対して、カメラ間の明るさの違い等を除くため、LOG(Laplacian Of Gaussian)フィルタをかけ、さらに、ヒストグラム平坦化処理を施す。図3は入力されるステレオ原画像の一例を示す。図3(A)は基準画像を示し、図3(B)は参照画像を示している。また、図4は、図3に示されるステレオ原画像にLOGフィルタ処理とヒストグラム平坦化処理を施した結果画像を示す。図4(A)は図3(A)の基準画像の処理後の画像を示し、図4(B)は図3(B)の参照画像の処理後の画像を示している。
(1)まず、連続する基準画像Ib(t−1)、Ib(t)間の射影変換行列
(2)次に、(1)で求められた射影変換行列
(3)更に、ステレオ画像Ib(t)、Ir(t)間の射影変換行列
<ステップS110>求まった射影変換行列を用いて、道路面の平面領域(走行可能な平面領域)を抽出する
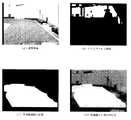
ステップS100で求めた射影変換行列を利用して、基準画像中から平面に対応した領域を抽出する。図6に図3のステレオ原画像を用いた一連の処理結果を示す。図6(A)は、LOGフィルタ処理とヒストグラム平坦化処理を施した基準画像(図4(A)と同じ)である。図6(B)は、ステップS100で述べた方法により推定した射影変換行列
<1>LOGフィルタ
本発明で用いられる領域ベースの手法(非特許文献5参照)の短所として、2つの画像の明るさが異なると、うまく処理が行えないところである。そこで、この画像間の明るさの差を取り除くために、入力されたステレオ原画像にLOGフィルタをかける。LOGフィルタは下記数3のように示される。本実施例ではσ=1、ウィンドウサイズ=7としている。
<2>射影変換行列の推定
ステップS100に説明された方法により、ステレオ画像間の平面の射影変換行列を動的に推定する。
<3>射影変換画像
<2>により得られた平面を表す射影変換行列によって、参照画像を射影変換する。射影変換行列が表す平面は、あたかも基準カメラから撮影したかのように一致し、射影変換行列が表す平面上にないものは、歪んで投影される。本発明ではこの性質を利用して平面領域を求める。
<4>差分画像
平面上に存在する点は基準画像へ正確に投影されるので、輝度値の差分は小さい。逆に、平面上にない点の輝度値の差分は大きくなる。閾値処理を施して差分の小さい領域を平面領域とする。このとき、ピクセルごとの差分ではノイズによる影響が大きいので、SADによるマッチングを施す。具体的には、差分画像に平滑化フィルタをかけることで実現している。その後、閾値を使って2値化する。
<5>前時刻平面領域の利用
ステレオ動画像において、前時刻と現時刻に撮影された画像にはとても高い相関がある。同様に、処理結果においても相関が高いことを利用して、前時刻の処理結果を利用することで安定した処理を行うようしている。ここでは現時刻に抽出される平面領域と非平面領域の境界が前時刻から予想される境界に対してある一定幅に収まると考えられる。そこで、それ以外の部分に関しては、前時刻の結果より平面領域ないし非平面領域と見なすことができるため、それを2値画像(マッチング結果)に反映する。
<6>テクスチャレス領域
<4>の差分画像だけを利用すると、画像上であまりテクスチャの無い領域、つまりテクスチャレス領域では、濃度値の変化が無いため、たとえ異なる場所が重なりあっていたとしても道路領域として認識してしまう恐れがある。また、テクスチャレス領域をそのまま道路領域からすべて取り除いてしまうと、本来道路領域であるのに誤って非道路領域としてしまう恐れがある。道路領域内にもテクスチャレス領域が存在するためである。そこでLOGフィルタをかけると、空間周波数が0に近い領域をテクスチャレス領域として抽出し、領域ごとにラベリングする(図13(a)のA、B)。
<7>テクスチャレス領域の考慮
<6>でラベリングしたテクスチャレス領域ごとに基準画像と参照画像のマッチング結果(図13(c))に完全に収まっている領域は道路領域とし、ずれが生じている領域(図13(c)のC)は非道路領域とする。
<8>Opening処理
求めたい道路領域は、自動車の走行可能な道路領域である。そこで、抽出された結果から、自動車の走行できない領域を取り除いている。まず、自動車の走行不可能な小さな領域を道路領域抽出結果から取り除く。得られた道路領域抽出結果からその面積を求め、閾値以下の領域を除去している。また、道路領域全体に収縮膨張処理を施す。
<ステップS120>射影変換行列を分解することにより道路面の傾きを算出する
ここでは平面領域抽出において得られた射影変換行列から、道路面の姿勢を表すパラメータである、基準カメラから道路平面までの距離dと道路平面の法線ベクトル
(I)
上記数13より、
<ステップS130>道路平面を上方から見た画像(仮想投影面画像)を生成する
ステップS120で求められた道路平面の姿勢パラメータを使って、図14に示されるように、基準画像に基づいて、道路平面と平行な仮想投影面(VPP:Virtual Projection Plane)画像を生成する。図14の中の記号を以下のように定義する。
<ステップS140>VPP画像上で走行可能な平面領域と自車輌の位置、方向を算出する
まずステップS130で説明された方法によって、図17のように平面領域のみ(白い領域)をVPP画像に変換した画像が図20である(つまり、この画像において白い領域が平面領域である)。
<ステップS150>VPP画像上での道路平面領域の自車輌からの最遠部すなわち障害物までの各方向毎の距離を算出する
領域の拡がりを求めるには、図20のような平面領域をVPP画像に変換した画像を用意し、その画像上での基準カメラ位置原点から光軸(Y軸)に対して、θ傾いた直線を伸ばし、平面領域の端を計算する(図22参照)。画像上での基準カメラ位置原点Oから平面領域の端の座標を求めることにより、光軸からθ傾いた場所における画像上での平面の拡がり長さを求めることができる。画像上での長さは仮想カメラの内部パラメータと、基準カメラ光学中心と道路平面との距離dを使うことで実際の距離に変換できる。つまり、この処理により平面領域の方向別距離が算出されたわけである。
<ステップS160>VPP画像上での道路平面領域の自車輌からの最遠部すなわち障害物までの各方向毎の相対速度を算出する
次に、VPP画像上での道路平面領域の自車輌からの最遠部すなわち障害物までの方向別相対速度を算出する。各時刻について、各方向別にステップS150で述べた方法を利用し、道路平面領域の方向別距離を計算する。
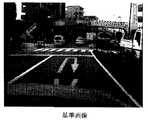
<ステップS170>VPP画像に走行可能な平面領域を重ね合わせて表示すると共に、算出された方向別距離、方向別相対速度情報を表示する
ステップS150及びステップS160で述べた方法により、各方向における道路平面領域の距離と相対速度が計算できたわけである。
Claims (4)
- 自動車に搭載される撮像手段によって撮影された、基準画像と参照画像から構成されるステレオ動画像のみを利用して、走行可能な道路平面領域及び道路面上に存在する全ての障害物を検出できるようにしたステレオ画像を用いた道路平面領域並びに障害物検出方法であって、
道路面に対する射影変換行列を動的に推定する第1のステップと、
第1のステップで求まった前記射影変換行列を用いて、走行可能な平面領域を抽出する第2のステップと、
第1のステップで求まった前記射影変換行列を分解することにより道路面の傾きを算出する第3のステップと、
第3のステップで算出された前記道路面の傾きを基に道路面を上方から見た仮想投影面画像を生成する第4のステップと、
第4のステップで生成された前記仮想投影面画像の上で、前記走行可能な平面領域と自車輌の位置と方向を算出する第5のステップと、
を有することを特徴とするステレオ画像を用いた道路平面領域並びに障害物検出方法。 - 前記仮想投影面画像の上での前記走行可能な平面領域より自車輌から障害物までの方向別距離を算出する第6のステップと、
前記仮想投影面画像の上での前記走行可能な平面領域より自車輌から障害物までの方向別相対速度を算出する第7のステップと、
を更に有する請求項1に記載のステレオ画像を用いた道路平面領域並びに障害物検出方法。 - 前記仮想投影面画像に前記走行可能な平面領域を重ね合わせて表示すると共に、前記方向別距離と前記方向別相対速度情報を表示する第8のステップと、
を更に有する請求項2に記載のステレオ画像を用いた道路平面領域並びに障害物検出方法。 - 前記第1のステップでは、前記基準画像及び前記参照画像にLOGフィルタ処理とヒストグラム平坦化処理を施してから、領域ベースの手法により、前記ステレオ画像間の道路面に対応する射影変換行列を動的に推定するようにし、
前記第2のステップでは、前記射影変換行列によって前記参照画像を射影変換し、前記基準画像と射影変換された前記参照画像との差分画像を求め、前記差分画像に平滑化フィルタをかけてから、閾値を使って2値化して2値画像が得られ、前記2値画像に前時刻平面領域の推定結果を利用すると共にテクスチャレス領域を考慮することによって、走行可能な平面領域を抽出するようにし、
前記第3のステップでは、前記道路面の傾きを示す道路平面姿勢パラメータは、基準カメラ光学中心から道路平面までの距離と道路平面の法線ベクトルであるようにし、
前記第4のステップでは、前記道路平面姿勢パラメータを使って、前記基準画像を射影変換して、道路平面と平行な仮想投影面画像を生成する請求項3に記載のステレオ画像を用いた道路平面領域並びに障害物検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004023493AJP4344860B2 (ja) | 2004-01-30 | 2004-01-30 | ステレオ画像を用いた道路平面領域並びに障害物検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004023493AJP4344860B2 (ja) | 2004-01-30 | 2004-01-30 | ステレオ画像を用いた道路平面領域並びに障害物検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005217883Atrue JP2005217883A (ja) | 2005-08-11 |
| JP4344860B2 JP4344860B2 (ja) | 2009-10-14 |
Family
ID=34906495
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004023493AExpired - Fee RelatedJP4344860B2 (ja) | 2004-01-30 | 2004-01-30 | ステレオ画像を用いた道路平面領域並びに障害物検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4344860B2 (ja) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007272668A (ja)* | 2006-03-31 | 2007-10-18 | Toyota Motor Corp | 画像処理装置および方法 |
| WO2008050904A1 (fr)* | 2006-10-25 | 2008-05-02 | Tokyo Institute Of Technology | Procédé de génération d'image dans un plan de focalisation virtuel haute résolution |
| JP2008250516A (ja)* | 2007-03-29 | 2008-10-16 | Honda Motor Co Ltd | 射影変換収束演算処理方法 |
| JP2011134226A (ja)* | 2009-12-25 | 2011-07-07 | Ihi Aerospace Co Ltd | 移動ロボットの遠方環境認識装置及び方法 |
| JP2011198098A (ja)* | 2010-03-19 | 2011-10-06 | Ihi Aerospace Co Ltd | ステレオカメラによる平面検出方法とこの方法を用いた移動ロボット |
| WO2011087354A3 (en)* | 2010-01-15 | 2011-10-06 | Mimos Berhad | Vehicle parking and obstacle avoidance system using a single panoramic camera |
| JP2011232965A (ja)* | 2010-04-28 | 2011-11-17 | Hitachi Ltd | 平面領域検出装置及びステレオカメラシステム |
| WO2014064990A1 (ja)* | 2012-10-25 | 2014-05-01 | シャープ株式会社 | 平面検出装置、平面検出装置を備えた自律移動装置、路面段差検出方法、路面段差検出装置、および路面段差検出装置を備えた車両 |
| JP2014085940A (ja)* | 2012-10-25 | 2014-05-12 | Sharp Corp | 平面検出装置およびそれを備えた自律移動装置 |
| KR101431373B1 (ko)* | 2013-02-26 | 2014-08-18 | 경북대학교 산학협력단 | 스테레오 정합을 이용한 차량의 움직임 측정 장치 |
| WO2014132747A1 (ja) | 2013-02-27 | 2014-09-04 | 日立オートモティブシステムズ株式会社 | 物体検知装置 |
| JP5916862B2 (ja)* | 2012-07-26 | 2016-05-11 | パイオニア株式会社 | 画像処理装置および画像処理方法 |
| CN106204634A (zh)* | 2016-06-22 | 2016-12-07 | 廖广军 | 一种通过监控视频或车载摄像头测量汽车速度的方法 |
| US9798939B2 (en) | 2014-09-30 | 2017-10-24 | International Business Machines Corporation | Detecting device, detecting method, and program |
| JP2019511780A (ja)* | 2016-03-15 | 2019-04-25 | コノート、エレクトロニクス、リミテッドConnaught Electronics Ltd. | 自動車両の道路付近の物体を検出するための方法、コンピュータデバイス、運転者支援システム、及び、自動車両 |
| JP2020090138A (ja)* | 2018-12-04 | 2020-06-11 | アイシン精機株式会社 | 路面検出装置および路面検出プログラム |
| US10984555B2 (en) | 2017-03-30 | 2021-04-20 | Mitsubishi Electric Corporation | Object detection device and vehicle |
- 2004
- 2004-01-30JPJP2004023493Apatent/JP4344860B2/janot_activeExpired - Fee Related
Cited By (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007272668A (ja)* | 2006-03-31 | 2007-10-18 | Toyota Motor Corp | 画像処理装置および方法 |
| WO2008050904A1 (fr)* | 2006-10-25 | 2008-05-02 | Tokyo Institute Of Technology | Procédé de génération d'image dans un plan de focalisation virtuel haute résolution |
| JPWO2008050904A1 (ja)* | 2006-10-25 | 2010-02-25 | 国立大学法人東京工業大学 | 高解像度仮想焦点面画像生成方法 |
| JP2008250516A (ja)* | 2007-03-29 | 2008-10-16 | Honda Motor Co Ltd | 射影変換収束演算処理方法 |
| US8036449B2 (en) | 2007-03-29 | 2011-10-11 | Honda Motor Co., Ltd. | Projective transformation convergence calculation method |
| JP2011134226A (ja)* | 2009-12-25 | 2011-07-07 | Ihi Aerospace Co Ltd | 移動ロボットの遠方環境認識装置及び方法 |
| WO2011087354A3 (en)* | 2010-01-15 | 2011-10-06 | Mimos Berhad | Vehicle parking and obstacle avoidance system using a single panoramic camera |
| JP2011198098A (ja)* | 2010-03-19 | 2011-10-06 | Ihi Aerospace Co Ltd | ステレオカメラによる平面検出方法とこの方法を用いた移動ロボット |
| JP2011232965A (ja)* | 2010-04-28 | 2011-11-17 | Hitachi Ltd | 平面領域検出装置及びステレオカメラシステム |
| US8675047B2 (en) | 2010-04-28 | 2014-03-18 | Hitachi, Ltd. | Detection device of planar area and stereo camera system |
| JP5916862B2 (ja)* | 2012-07-26 | 2016-05-11 | パイオニア株式会社 | 画像処理装置および画像処理方法 |
| WO2014064990A1 (ja)* | 2012-10-25 | 2014-05-01 | シャープ株式会社 | 平面検出装置、平面検出装置を備えた自律移動装置、路面段差検出方法、路面段差検出装置、および路面段差検出装置を備えた車両 |
| JP2014085940A (ja)* | 2012-10-25 | 2014-05-12 | Sharp Corp | 平面検出装置およびそれを備えた自律移動装置 |
| KR101431373B1 (ko)* | 2013-02-26 | 2014-08-18 | 경북대학교 산학협력단 | 스테레오 정합을 이용한 차량의 움직임 측정 장치 |
| US9373175B2 (en) | 2013-02-26 | 2016-06-21 | Kyungpook National University Industry-Academic Cooperation Foundation | Apparatus for estimating of vehicle movement using stereo matching |
| US9679196B2 (en) | 2013-02-27 | 2017-06-13 | Hitachi Automotive Systems, Ltd. | Object sensing device |
| WO2014132747A1 (ja) | 2013-02-27 | 2014-09-04 | 日立オートモティブシステムズ株式会社 | 物体検知装置 |
| US9798938B2 (en) | 2014-09-30 | 2017-10-24 | International Business Machines Corporation | Detecting device, detecting method, and program |
| US9798939B2 (en) | 2014-09-30 | 2017-10-24 | International Business Machines Corporation | Detecting device, detecting method, and program |
| US10331962B2 (en) | 2014-09-30 | 2019-06-25 | International Business Machines Corporation | Detecting device, detecting method, and program |
| US10331961B2 (en) | 2014-09-30 | 2019-06-25 | International Business Machines Corporation | Detecting device, detecting method, and program |
| US10339397B2 (en) | 2014-09-30 | 2019-07-02 | International Business Machines Corporation | Detecting device, detecting method, and program |
| JP2019511780A (ja)* | 2016-03-15 | 2019-04-25 | コノート、エレクトロニクス、リミテッドConnaught Electronics Ltd. | 自動車両の道路付近の物体を検出するための方法、コンピュータデバイス、運転者支援システム、及び、自動車両 |
| CN106204634A (zh)* | 2016-06-22 | 2016-12-07 | 廖广军 | 一种通过监控视频或车载摄像头测量汽车速度的方法 |
| CN106204634B (zh)* | 2016-06-22 | 2019-07-09 | 广东警官学院 | 一种通过监控视频或车载摄像头测量汽车速度的方法 |
| US10984555B2 (en) | 2017-03-30 | 2021-04-20 | Mitsubishi Electric Corporation | Object detection device and vehicle |
| JP2020090138A (ja)* | 2018-12-04 | 2020-06-11 | アイシン精機株式会社 | 路面検出装置および路面検出プログラム |
| JP7211047B2 (ja) | 2018-12-04 | 2023-01-24 | 株式会社アイシン | 路面検出装置および路面検出プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4344860B2 (ja) | 2009-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7321386B2 (en) | Robust stereo-driven video-based surveillance | |
| JP4344860B2 (ja) | ステレオ画像を用いた道路平面領域並びに障害物検出方法 | |
| JP3868876B2 (ja) | 障害物検出装置及び方法 | |
| US8872925B2 (en) | Method and device for camera calibration | |
| US7684590B2 (en) | Method of recognizing and/or tracking objects | |
| KR101188588B1 (ko) | 모노큘러 모션 스테레오 기반의 주차 공간 검출 장치 및방법 | |
| KR101569919B1 (ko) | 차량의 위치 추정 장치 및 방법 | |
| JP4930046B2 (ja) | 路面判別方法および路面判別装置 | |
| KR102151815B1 (ko) | 카메라 및 라이다 센서 융합을 이용한 객체 검출 방법 및 그를 위한 장치 | |
| JP2002352225A (ja) | 障害物検出装置及びその方法 | |
| WO2020154990A1 (zh) | 目标物体运动状态检测方法、设备及存储介质 | |
| JP6552448B2 (ja) | 車両位置検出装置、車両位置検出方法及び車両位置検出用コンピュータプログラム | |
| US20200193184A1 (en) | Image processing device and image processing method | |
| JP4967758B2 (ja) | 物体移動の検出方法及び検出装置 | |
| Yang | Estimation of vehicle's lateral position via the Lucas-Kanade optical flow method | |
| Hwang et al. | Vision-based vehicle detection and tracking algorithm design | |
| JP6886136B2 (ja) | 位置合わせ装置、位置合わせ方法及び位置合わせ用コンピュータプログラム | |
| JP4106163B2 (ja) | 障害物検出装置及びその方法 | |
| JP5903901B2 (ja) | 車両位置算出装置 | |
| CN110488320B (zh) | 一种利用立体视觉检测车辆距离的方法 | |
| García-García et al. | 3D visual odometry for GPS navigation assistance | |
| CN114868150A (zh) | 信息处理装置、感测装置、移动体以及信息处理方法 | |
| JPH09259282A (ja) | 移動障害物検出装置及びその方法 | |
| Son et al. | Detection of nearby obstacles with monocular vision for earthmoving operations | |
| WO2006123438A1 (ja) | ステレオ画像を用いた道路平面領域並びに障害物検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20061002 | |
| A711 | Notification of change in applicant | Free format text:JAPANESE INTERMEDIATE CODE: A711 Effective date:20071023 | |
| RD02 | Notification of acceptance of power of attorney | Free format text:JAPANESE INTERMEDIATE CODE: A7422 Effective date:20071206 | |
| RD13 | Notification of appointment of power of sub attorney | Free format text:JAPANESE INTERMEDIATE CODE: A7433 Effective date:20071206 | |
| A711 | Notification of change in applicant | Free format text:JAPANESE INTERMEDIATE CODE: A711 Effective date:20071023 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20080222 | |
| A871 | Explanation of circumstances concerning accelerated examination | Free format text:JAPANESE INTERMEDIATE CODE: A871 Effective date:20090317 | |
| A975 | Report on accelerated examination | Free format text:JAPANESE INTERMEDIATE CODE: A971005 Effective date:20090409 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20090609 | |
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20090624 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:4344860 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 Free format text:JAPANESE INTERMEDIATE CODE: R150 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20120724 Year of fee payment:3 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20130724 Year of fee payment:4 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20130724 Year of fee payment:4 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20130724 Year of fee payment:4 | |
| FPAY | Renewal fee payment (event date is renewal date of database) | Free format text:PAYMENT UNTIL: 20210724 Year of fee payment:12 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| LAPS | Cancellation because of no payment of annual fees |