EP2380709A2 - 3D safety device and method for securing and operating at least one machine - Google Patents
3D safety device and method for securing and operating at least one machineDownload PDFInfo
- Publication number
- EP2380709A2 EP2380709A2EP11156685AEP11156685AEP2380709A2EP 2380709 A2EP2380709 A2EP 2380709A2EP 11156685 AEP11156685 AEP 11156685AEP 11156685 AEP11156685 AEP 11156685AEP 2380709 A2EP2380709 A2EP 2380709A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- machine
- operator
- evaluation unit
- security device
- workstation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription16
- 230000033001locomotionEffects0.000claimsabstractdescription67
- 238000011156evaluationMethods0.000claimsabstractdescription47
- 230000001681protective effectEffects0.000claimsdescription35
- 239000011521glassSubstances0.000claimsdescription10
- 230000036544postureEffects0.000claimsdescription10
- 238000001514detection methodMethods0.000claimsdescription4
- 241000282414Homo sapiensSpecies0.000description11
- 238000004519manufacturing processMethods0.000description8
- 230000003993interactionEffects0.000description7
- 230000008569processEffects0.000description7
- 230000008901benefitEffects0.000description5
- 210000004247handAnatomy0.000description5
- 210000003811fingerAnatomy0.000description4
- 230000006870functionEffects0.000description4
- 210000003128headAnatomy0.000description4
- 230000003287optical effectEffects0.000description4
- 230000006978adaptationEffects0.000description3
- 238000004891communicationMethods0.000description3
- 238000012937correctionMethods0.000description3
- 230000000694effectsEffects0.000description3
- 238000005286illuminationMethods0.000description3
- 238000003780insertionMethods0.000description3
- 230000037431insertionEffects0.000description3
- 238000003754machiningMethods0.000description3
- 238000012544monitoring processMethods0.000description3
- 238000003909pattern recognitionMethods0.000description3
- 238000012545processingMethods0.000description3
- 239000000047productSubstances0.000description3
- 230000000007visual effectEffects0.000description3
- 238000013459approachMethods0.000description2
- 230000008859changeEffects0.000description2
- 238000003384imaging methodMethods0.000description2
- 238000005304joiningMethods0.000description2
- 230000005693optoelectronicsEffects0.000description2
- 238000000926separation methodMethods0.000description2
- 210000003813thumbAnatomy0.000description2
- 238000012546transferMethods0.000description2
- 230000001960triggered effectEffects0.000description2
- 238000012800visualizationMethods0.000description2
- 241000282412HomoSpecies0.000description1
- 230000004308accommodationEffects0.000description1
- 230000009471actionEffects0.000description1
- 239000000853adhesiveSubstances0.000description1
- 230000001070adhesive effectEffects0.000description1
- 230000003466anti-cipated effectEffects0.000description1
- 230000004888barrier functionEffects0.000description1
- 239000011324beadSubstances0.000description1
- 239000000969carrierSubstances0.000description1
- 238000012790confirmationMethods0.000description1
- 238000010276constructionMethods0.000description1
- 230000006735deficitEffects0.000description1
- 230000003111delayed effectEffects0.000description1
- 238000013461designMethods0.000description1
- 230000004069differentiationEffects0.000description1
- 238000005516engineering processMethods0.000description1
- 230000003203everyday effectEffects0.000description1
- 230000005057finger movementEffects0.000description1
- 210000005224forefingerAnatomy0.000description1
- 231100001261hazardousToxicity0.000description1
- 230000004886head movementEffects0.000description1
- 238000009776industrial productionMethods0.000description1
- 238000002329infrared spectrumMethods0.000description1
- 238000007689inspectionMethods0.000description1
- 238000000465mouldingMethods0.000description1
- 230000002028prematureEffects0.000description1
- 238000002360preparation methodMethods0.000description1
- 238000000275quality assuranceMethods0.000description1
- 238000001454recorded imageMethods0.000description1
- 230000009467reductionEffects0.000description1
- 230000004044responseEffects0.000description1
- 210000001525retinaAnatomy0.000description1
- 230000002207retinal effectEffects0.000description1
- 238000005096rolling processMethods0.000description1
- 238000010079rubber tappingMethods0.000description1
- 239000011265semifinished productSubstances0.000description1
- 230000001953sensory effectEffects0.000description1
- 238000010008shearingMethods0.000description1
- 239000004984smart glassSubstances0.000description1
- 238000001228spectrumMethods0.000description1
- 230000003068static effectEffects0.000description1
- 238000003860storageMethods0.000description1
- 238000012360testing methodMethods0.000description1
Images

Classifications
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/406—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by monitoring or safety
- G05B19/4061—Avoiding collision or forbidden zones
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1694—Programme controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/12—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine
- F16P3/14—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact
- F16P3/142—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact using image capturing devices
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/37—Measurements
- G05B2219/37567—3-D vision, stereo vision, with two cameras
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40196—Projecting light on floor to delimit danger zone around robot
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40201—Detect contact, collision with human
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40202—Human robot coexistence
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40203—Detect position of operator, create non material barrier to protect operator
Definitions
- the inventionrelates to a 3D security device and a method for securing and operating at least one machine at a cooperative workstation according to the preamble of claims 1 and 15, respectively.
- the goalis always a flexible assembly in combination with semi-automatic solutions.
- Semi-automatic work stepssuch as joining processes or the application of adhesive beads, are specified for reasons of quality or construction and, when executed by automatic equipment, may present hazards to the operator as a result of crushing or shearing. In current practice, therefore, there is a hedge in the form of distancing the operator from the danger spot.
- optoelectronic sensorsare often used, such as safety light grids or safety laser scanners.
- the workplaceis either used by the operator or by the machine, and there is virtually no direct cooperation.
- Relatively rigid specificationsare to be met by cuts in the work process that require an interaction between man and machine in order to ensure safety, because, for example, the transfer of a workpiece requires that the securing sensors temporarily tolerate a close rimpedement between man and machine.
- the protectioncan not be based solely on a fixed timing, because this would preclude any correction in errors of the operator or the workpiece.
- Such 3D sensorsare usually designed as a camera.
- a stereoscopic camera systemcaptures two or more images of a scene from different perspectives, arranges structures of the different images to each other and triangulates from the disparity, ie the apparent offset of the structures, and their distance based on the known perspectives.
- a light signalis actively transmitted and for each pixel, for example by means of photon mixing detection, the time until receipt of the light remitted from the scene is determined. Because of the known and constant speed of light, this also provides a three-dimensional distance map.
- Image sensorsare known in whose intelligent pixels the transit time determination is integrated.
- laser scanners or light gridscan be further developed into three-dimensional sensors.
- the laser scannerwhich usually scans only one plane, also moves in the vertical to the usual scanning movement.
- a light gridcan be formed groping, so it consists of distance-measuring light sensors instead of simple light barriers.
- the light transit time methodis used in analogy to the method described for a runtime camera.
- HMDsHead Mounted Displays
- VRDsVirtual Retinal Displays
- From the DE 10 2006 048 166 A1is a multi-camera system for observing a person in an industrial environment is known in which continuously a virtual 3D model is adapted to the recorded image data of a person to determine the position and the movement behavior of the person. From this, a hazard potential is estimated and, if this exceeds a threshold, the motion control of a machine in the environment of the person acted.
- the conventional camera systemdoes not give the person any opportunities to interact with the camera system or the machine.
- the movement behavioris evaluated exclusively with regard to a possible danger situation.
- the EP 2 048 557 A1discloses an opto-electronic sensor for monitoring a spatial area in which protective fields are configured by guiding a particular handset along the desired protective field boundaries in the spatial area.
- the already configured or partially configured protective fieldsare displayed in an embodiment with a data glasses.
- the special handsetis required.
- the interactionrelates solely to the sensor and a configuration phase prior to the actual manufacturing operation.
- a 3D security deviceaccording to claim 1 and a method for securing and operating at least one machine at a cooperative workstation according to claim 15.
- the inventionis based on the basic idea of using three-dimensional image data of a safety sensor not only for the protection, but also for the operation. Certain movement patterns of the operator are recognized and interpreted as input to the 3D sensor or the machine and further processed. For example, the 3D sensor is instructed to switch to another mode, to choose a different viewing angle, to deactivate, or the like. Instead of separating man and machine by a safety device as usual, a real cooperation is achieved.
- Movement patternsare to be understood broadly and include static elements such as a pose or posture. Both the poses and the movements are recognized with a margin of tolerance, because no identical movements and postures are expected from a human operator.
- the recognition of a movement patterntakes place, for example, by classification, that is, the specific assignment to one of several possible movement patterns.
- a cooperative workstationis understood to be an area in which at least one operator and at least one machine, such as a robot, an assembly station or the like, are active at the same time, at least in one part of the manufacturing process exchanging work results between man and machine or carrying out work steps together become.
- the inventionhas the advantage that the operation, ie the man-machine interface, is completely integrated into the safety-related solution by means of 3D technology.
- the cooperation of the operator with the machineis understood as a 3D interface.
- Thisallows a simple, intuitive communication for the operator.
- Ancillary and secondary activities to set up and adapt the workplaceare reduced.
- Productivityis increased and ergonomic adjustments are made easier. This improves both the quality of the product and job satisfaction.
- a display deviceis provided, in particular a projector or a data glasses, in order to present the operator with an additional information superimposed image of the workplace, the additional information in particular the representation of a workpiece, a proposed position, pose or movement of the operator and / or include a protective field ,
- the displayis even more preferable three-dimensional.
- the operatorrecognizes, for example, the necessary insertion direction for a workpiece, their own designated position and posture or the current limits of a danger zone.
- a pair of smart glassesis hereby referred to as a proxy for all HMDs or similar display means that are worn attached to the body to present to the eye an image that can be overlaid with the natural field of view.
- the display devicepreferably communicates wirelessly with the evaluation device and is integrated into an already worn protective helmet or goggles.
- the display deviceis preferably designed to display operating elements in the workstation, in particular virtual switches or controllers.
- the 3D sensordetects motion patterns of the operator as user input. For the operation of virtual switches, therefore, it is ultimately important to bring a body part to a specific point and there possibly perform a certain movement. This movement can be a gesture, especially from the finger alphabet. But so that the operator knows what movement is expected of her, these controls are displayed so that the operator activates them, for example, on the positioning of the hands in the thus marked switch area. This eliminates the need for conventional switches on the machine, and the virtual switches can always be displayed ergonomically, easily accessible to the operator.
- a particularly safety-relevant operating elementis a virtual emergency stop switch, which is shown, for example, as a visual ring around a specific area. Also conceivable is an optical two-hand switch.
- the evaluation unitis preferably configured to detect a difference between a desired state and an actual state and to display it by means of the display device.
- a desired stateis, for example, the required type and shape of a workpiece, its position and orientation, the position and posture of the operator or their sequence of movements for a work step to be performed.
- the displaycan be made as a color mark. For color blinds, both the color is selectable and a different structuring possible. The operator recognizes so quickly whether something is wrong with the workpiece or the workflow, and can correct this early.
- the evaluation unitis even more preferably configured to refuse a work step of the machine until the desired state and actual state coincide.
- Thiscan be a quality assurance. For example, it checks whether the correct workpiece has been inserted in the correct way. Only then is it possible to trigger the subsequent automatic work step. The agreement is required only in a practically relevant measure. Another possibility is to check the completeness before a clock release, for example, in joining or assembly tasks.
- the evaluation unitis preferably designed to detect gestures or postures, in particular hand movements, as movement patterns.
- certain gesturesare assigned to virtual switches. This way of operating a switch, for example by means of wiping, can be used alternatively or cumulatively for the insertion of switching elements by means of the display device.
- a gesture controlcan be analogous to the sign language give even complex commands.
- a movement patternis the superordinate term compared to a gesture, because a movement pattern in addition to gestures also includes a change of position and movements involving the whole body. The closer the detected movement patterns are to everyday gestures, the more intuitive the operation becomes. All gestures mentioned in this description are only examples, the invention is not limited thereto.
- the direct interaction with the machineallows manual handling of the workpiece and thus the saving of support facilities, because the usual shelves or moldings can be omitted.
- the workpieceis inserted and manually fixed and then triggered the machining process by a specific gesture, such as a specific spatial hand position for the two hands.
- the evaluation unitis preferably designed to detect movement patterns for the lifting or lowering of a machine part or the setting of a distance between the operator and the machine part and to move the machine part accordingly.
- Such movement patternsconsist, for example, based on the hand signals of a referrer from a lowering or raising of both downward or upward facing palms or the display of a distance between the mutually facing palms.
- the evaluation unitis preferably designed to recognize movement patterns for triggering or terminating an automatic work step and to control the machine accordingly for executing or stopping the work step, wherein a movement pattern is in particular an emergency release or a posture for operating a virtual two-hand circuit.
- a movement patternis in particular an emergency release or a posture for operating a virtual two-hand circuit.
- gesturessuch as the thumb pointing up or down or the OK mark formed between the thumb and forefinger are used. It can be defined a special emergency gesture for emergency stop, which should be particularly robust recognizable and particularly easy to do and at the same time precludes that the operator performs this movement pattern randomly.
- An exampleis the defensive Vor zonen both hands.
- a two-hand switchcan also be interpreted as a movement pattern. In this case, the position of the hands and possibly also of the head is monitored, so that it is ensured that at least these body parts are not endangered by the subsequent work step.
- the evaluation unitis preferably designed to detect movement patterns for pushing back a machine part and to move the machine part accordingly.
- Thisis a special movement pattern, such as a gesture analogous to the scare away a fly. So instead of triggering an emergency stop when approaching the source of danger, it is thus possible to move the machine part, such as an axis of a robot, to retreat. As long as no danger is detected and no protective field is injured, the retraction of the machine part can also be delayed to complete an automatic work step first.
- scare and emergency stopcan solve the conflict between process safety and dangerous situations. If the operator interferes with the protection area, an emergency stop is required, which can lead to quality problems. The intervention is sometimes done to make corrections.
- the sub-stepcan be completed, the axis then retracts, and the correction can be made. Subsequently, the step is restarted and completed by means of a start gesture.
- This purposeis a Heranwinken. If the axis is to change its position, the index finger points in the respective direction. The duration of this gesture decides the distance traveled.
- the evaluation unitis preferably designed for a configuration mode in which movement patterns of a specific operator are taught in and control elements or user inputs are assigned.
- Thisis a kind of "3D Customizing”.
- the 3D interface realized by the inventioncan be adapted to individual preferences of the operator. But also individual peculiarities with particularly great impact on the ergonomics, such as right or left handedness, or height or physical impairments are considered.
- the movement patternsare individually teachable to achieve a robust recognition and an intuitive and simple control for each operator. Finally, certain control options can be enabled or disabled.
- the evaluation unitis preferably designed for a calibration mode in which the workstation and the machine are adapted to the operator, in particular by determining the hand height or the head height and then an ergonomic height adjustment of the workplace and / or an ergonomic presentation of workpieces by the machine to the Operator takes place.
- the work table and the footprint of the operator forced posturesare avoided and biomechanical levers of the operator used optimally. Since an adjustment of the table height makes the workpiece logistics more difficult, it is alternatively possible to adapt the height of the standing surface.
- Calibrationis based, for example, on the hand position by measuring the current hand height of the hands presented and adjusting the height elements of the workstation. It is also conceivable to use the body size based on the head height.
- the calibrationcan be done at the beginning of the shift or activated at any time to ensure an optimal adaptation to the stature of the current operator. The storage in a user profile is possible.
- the presentation of the workpiecesis adapted to the operator. Especially for heavy workpieces, lifting aids are used, it is interacted with robots, or the assembly takes place on rolling workbenches.
- the workpieceshould always be at an ergonomic working height, which depends on the operator and the safety device is known due to the calibration. If the preferred working hand is also specified, the workpiece presentation can be further optimized, for example, via an angle of attack to the operator.
- the evaluation unitis preferably designed to detect a hazard to the operator based on an unauthorized intervention in a protected area within the workplace. A dangerous situation is therefore always recognized when an intervention in a protective field takes place. This facilitates danger detection. Inadmissible interventions must be distinguished from permissible interventions, for example by the machine or a workpiece. If the safety device can assign protective field interventions to such known objects and if such interception of the protective field is provided for in the process, then no protection must be provided.
- the protection areasare even more preferably dynamically adapted to a currently machined workpiece.
- the dynamic adaptationaccordingly takes into account not only the moving machine part, but also the workpiece, which could swing up, for example.
- the protective fieldwould have to be interpreted according to the maximum case. The smaller the protective fields are, with continued guaranteed protection, the less the operator is thereby restricted, and the less unnecessary shutdowns reduce the availability.
- the display deviceis preferably designed to represent the operator the protective fields. This applies both to a configuration phase in which protective fields are set up, as well as for the actual operation.
- the configurationwhich is initiated by a rather complex authentication gesture, the hand is moved along the desired protective field boundaries with a certain finger position.
- a further gesturefor example, double tapping with the index finger, an existing protective field boundary can be selected and then changed by hitching or pushing or virtual touch and positioning.
- the display devicegives visual feedback about the work progress and the current input.
- the active protective fieldsare displayed to reduce accidental intervention by the operator. Especially with dynamically adapted to the current situation protected fields would not always be clear which areas trigger the safety function without such a display, so that the operator observes unnecessary safety distances and thus restricted in their freedom of movement.
- the evaluation unitis preferably designed to visually emphasize contours of objects that inadmissibly engage in a protective field by means of the display device. For this purpose, for example, with a flashing function on whole objects or only interference contours are pointed out, which are still in the protection area. With these clear indications, you can quickly find and eliminate the cause of a safety-related trip, and availability improves.
- the evaluation unitis preferably designed to store the three-dimensional image data when a shutdown command is issued. This documents how the emergency stop could come about in order to reconstruct an accident or to optimize the process in the future.
- the imagescan also be constantly recorded and visualized in a security center, for example.
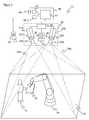
- FIG. 1shows in a schematic three-dimensional representation of the general structure of a 3D safety device 10 according to the invention at a cooperative workstation 12.
- a machine 16in the example a robot, deals with a hybrid assembly, wherein in the illustrated step, the machine a workpiece 18 edited.
- the 3D security device 10has a 3D sensor 20, which is designed as a stereoscopic camera.
- the inventionis independent of the manner in which three-dimensional image data is obtained, and also includes other 3D sensors including the initially mentioned laser scanner and light time cameras. It is conceivable, an additional, in the FIG. 1 not shown 2D camera to use to obtain additional image data, which are recorded, for example, higher resolution, in a different spectrum or from a different perspective.
- the 3D sensorcan be mounted laterally instead of vertically.
- the 3D security device 10is further equipped with a projector 30 with which visual information is projected onto the workstation 12.
- An evaluation unit 40is connected to the 3D sensor 20 and the projector 30 and deals with the control and evaluation of the 3D security device 10. This combination allows both data and information to be displayed and control commands to be triggered. It is also possible to use a plurality of 3D sensors 20 and / or a plurality of projectors 30, for example to cover a larger work area or to compensate for poor viewing and projection angles or shadowing.
- two camera modules 21a-bare mounted at a known, fixed distance from each other and each take pictures of the workstation 12.
- an image sensor 22a-bis provided, usually a matrix-shaped recording chip, which receives a rectangular pixel image, for example a CCD or a CMOS sensor.
- the image sensors 22a-bare each assigned an objective 23a-b with imaging optics, which in practice can be realized as any known imaging objective.
- the viewing angle of these opticsis in FIG. 1 represented by dashed lines, each forming a viewing pyramid 24a, 24b.
- a lighting unit 25is provided, wherein this spatial arrangement is to be understood only as an example and the lighting unit may also be arranged asymmetrically or even outside of the 3D sensor 10.
- This illumination unit 25has a light source 26, for example one or more lasers or LEDs, and a pattern generation element 27, which is designed, for example, as a mask, phase plate or diffractive optical element.
- the lighting unit 25is able to illuminate the space area 12 with a structured pattern.
- the structured illumination patternfacilitates the stereoscopic acquisition of 3D image data, but should preferably be invisible to the operator 14, for example in the infrared spectrum.
- a stereoscopic evaluation unit 28Connected to the two image sensors 21a-b is a stereoscopic evaluation unit 28, which receives image data from the image sensors 21a-b and calculates therefrom three-dimensional image data of the workstation 12 with the aid of a stereoscopic disparity estimation.
- the structured illumination patternensures good contrast and a clearly assignable structure of each pixel of the illuminated workstation 12.
- the space area 12 monitored by the security sensor 10may contain known and unexpected objects. For example, as shown, this may be a robot arm 32, but also another machine, an operator and others.
- the room area 12provides access to a source of danger, be it because it is an access area or because a dangerous machine, such as the robotic arm 32, is in the room area 12 itself.
- one or more virtual protection and alert fields 34may be configured. They form a virtual fence around the dangerous machine 32. Due to the three-dimensional evaluation, it is possible to define protection and warning fields 34 three-dimensionally, so that a great flexibility arises.
- the 3D sensor 20outputs the three-dimensional image data to the evaluation unit 40.
- a movement pattern recognition unit 41 of the evaluation unit 40the operator 14 is identified within the three-dimensional image data and determines their position, trajectory and posture.
- gestures and posesare roughly resolved only roughly from the entire body to a fine recognition of individual finger movements.
- Possibilities of detecting 3D motion patternsare known per se and, for example, in the introductory mentioned DE 10 2006 048 166 A1 and the literature cited therein.
- a 3D model of a personis parameterized on the basis of the current image data. By classifying known movement patterns, it is then decided which movement pattern the person is currently performing. For this purpose, not only the current image is often evaluated, but also the past is taken into account.
- a known method for thisis the object tracking, for example based on Kalman filters.
- the evaluation unit 40interprets this as a user input analogous to the operation of a switch or regulator.
- the evaluation unit 40then executes the command provided for the movement pattern or Operation or passes a corresponding signal to the 3D sensor 20, the projector 30 or via a connection, not shown, which may also be realized wirelessly or indirectly via a system control, to the machine 16 on.
- a display controller 42is provided in the evaluation unit 40.
- operating elementscan be projected onto the workstation, return confirmations for inputs and, more generally, data and information for the operator 14 can be visualized.
- An important information for the operator 14are protective fields 50, which must not be interfered with for safety reasons, wherein in FIG. 1 By way of example, a virtual wall between the operator 14 and the machine 16 is shown as a protective field 50.
- protective fields 50are evaluated in a protective field evaluation unit 43 of the evaluation unit 40 for improper interventions.
- the evaluation rulesmay stipulate, for example, that no object may be present in protective fields 50 at all.
- More flexible evaluation rulesprovide differentiation between allowed and non-permitted objects, such as trajectories, patterns or contours, speeds or general workflows that are both learned in advance as well as evaluated on the basis of assessments, heuristics or classifications during operation.
- the protective field evaluation unit 43knows the movement behavior of the operator 14 from the movement pattern recognition unit 41. Quite analogously, the movement pattern of the machine 16 can also be recognized by the 3D sensor 20. Alternatively or additionally, the data of the machine control are also available for the movement pattern of the machine 16. This highly flexible protective fields 50 are possible, which are adapted to the particular situation.
- the protective field evaluation unit 43detects an impermissible intervention in a protective field 50, the machine 16 is stopped, braked or moved to a safe position via a safety output 44 (OSSD, output signal switching device) or a safety network.
- a safety output 44(OSSD, output signal switching device) or a safety network.
- the safety device 10is designed fail-safe. This means, inter alia, that the 3D sensor 10 and the evaluation unit 40 can test themselves, even in cycles below the required response time, and that the safety output 44 is safe, designed, for example, two-channel.
- at least all security-related evaluationsare self-assured units, so they evaluate two-channel or use algorithms that can check themselves.
- Such safety regulationsare for general non-contact protective devices standardized in EN 61496-1 or IEC 61496 and standardized in DIN EN ISO 13849 and EN 61508.
- a corresponding standard for security camerasis in preparation.
- the movement pattern recognition unit 41 and the display controller 42 as well as the projector 30do not necessarily have to be constructed and monitored as strictly as here a failure does not lead to an accident risk.
- data glasses or an HMDare used in a further, not shown embodiment.
- the data glassesare wirelessly controlled by the display controller 42 and represent the information of the evaluation unit 40 of the operator 14 so as to overlap the natural image and the artificial information. This is done either by the data glasses continue to allow the view of the scenery, or by another camera at the head of the operator, the workplace 12 from its perspective and electronically processed to a superimposed three-dimensional view. In this case, even to facilitate the operator irrelevant picture elements can be hidden, such as distant objects.
- a hazardous movement of the machine 16could be optically anticipated to achieve a natural retreat of the operator.
- the position and viewing direction of the operatormust be detected, be it by the 3D sensor 20 and the movement pattern evaluation unit 41 or supported or exclusively by additional sensors of the data glasses.
- the 3D security device 10creates an intuitive and uniform 3D interface in which information representation, operating actions, visualization of work steps and machine safety are combined. So far, independent elements have been integrated into an optimal overall solution for an effective, safe and ergonomic man-machine interaction, which also ensures quality and reduces non-productive time and secondary activities.
- FIGS. 1 and 2illustrate a partial aspect of this interaction.
- the machine 16processes the workpiece 18 and the operator is completely separated from the machine 16 by the protective wall 50.
- This situationreflects the conventional parallel work. According to the invention, such a separation is provided only for certain operations in which no interaction is required or in which the machining is so dangerous that the operator must keep greater distance.
- FIG. 2shows a later processing step.
- the automatic partial machining of the workpiece 18is completed, and the machine 16 transfers the workpiece 18 to the operator 14 or holds it at a comfortable working height and position for manual processing or inspection.
- the protective field 50is dynamically adjusted, in this case so far that it has completely disappeared, because the stationary robot arm is not a source of danger.
- the operator 14is now using the gestures described above, for example, the robot arm to position changes, rotations or, after completion of the manual substep, to continue automatic processing.
- the evaluation unit 40will generate correspondingly adapted protective fields 50.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Robotics (AREA)
- Manipulator (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
Description
Translated fromGermanDie Erfindung betrifft eine 3D-Sicherheitsvorrichtung und ein Verfahren zur Absicherung und Bedienung mindestens einer Maschine an einem kooperativen Arbeitsplatz nach dem Oberbegriff von Anspruch 1 beziehungsweise 15.The invention relates to a 3D security device and a method for securing and operating at least one machine at a cooperative workstation according to the preamble of claims 1 and 15, respectively.
In der Fertigung industrieller Güter besteht neben der Vollautomation ein weites Feld von teilautomatisierten Lösungen zur Montage. Dabei sind beispielsweise Arbeitsplätze vorgesehen, an denen einige Arbeitsschritte nicht mechanisiert, sondern in Handarbeit ausgeführt werden. Solche Anwendungen werden als hybride Montage bezeichnet und dienen einer Aufgabenteilung zwischen Mensch und automatischen Maschinenfunktionen, um die jeweiligen spezifischen Vorteile zu nutzen: die Maschine mit ihrer Gleichmäßigkeit und Wiederholgenauigkeit von Funktionen und der Mensch mit seinen Anpassungsfähigkeiten an Änderungen und Störungen sowie seinen sensorischen und haptischen Fähigkeiten.In the production of industrial goods, in addition to full automation, there is a wide field of semi-automated solutions for assembly. In this case, for example, jobs are provided at which some work steps are not mechanized, but executed by hand. Such applications are referred to as hybrid assembly and serve a division of tasks between human and automatic machine functions to take advantage of their specific advantages: the machine with its uniformity and repeatability of functions and the human being with its adaptability to changes and disturbances as well as its sensory and haptic capabilities ,
Gerade bei neuen Produkten wird oft mit einer einfachen Handmontage begonnen, welche anschließend weiter automatisiert wird und damit wachsen kann, um die Stückzahl der Nachfrage und dem Lebenszyklus anzupassen. Aber auch in reifen Produktionsstadien gibt es Aufgabenstellungen, welche nur sehr schwierig zu automatisieren sind, so dass Handarbeitsplätze im Fertigungsablauf verbleiben. Diese Kombination findet man beispielsweise in verketteten Montagelinien, wo auf Werkstückträgern ggf. mehrmalige Umläufe zwischen Automatikstationen und Handarbeitsplätzen notwendig sind.Especially with new products, it is often started with a simple hand assembly, which is then further automated and can grow with it to adjust the number of demand and the life cycle. But even in mature production stages, there are tasks that are very difficult to automate, so that manual workstations remain in the production process. This combination can be found, for example, in interlinked assembly lines, where multiple passes between automatic stations and manual workstations may be necessary on workpiece carriers.
Das Ziel ist jeweils eine flexible Montage in Kombination mit teilautomatischen Lösungen. Teilautomatische Arbeitsschritte, wie Fügeprozesse oder das Auftragen von Kleberaupen, sind aus Gründen der Qualität oder durch die Konstruktion vorgegeben und können bei ihrer Ausführung durch Automatiken Gefahren für den Werker durch Quetsch- oder Scherstellen darstellen. In der gegenwärtigen Praxis erfolgt darum eine Absicherung in Form einer Distanzierung der Bedienperson gegenüber der Gefahrenstelle. Dazu werden häufig optoelektronische Sensoren eingesetzt, wie Sicherheitslichtgitter oder Sicherheitslaserscanner. Der Arbeitsplatz wird entweder von der Bedienperson oder von der Maschine genutzt, und eine direkte Kooperation findet praktisch nicht statt.The goal is always a flexible assembly in combination with semi-automatic solutions. Semi-automatic work steps, such as joining processes or the application of adhesive beads, are specified for reasons of quality or construction and, when executed by automatic equipment, may present hazards to the operator as a result of crushing or shearing. In current practice, therefore, there is a hedge in the form of distancing the operator from the danger spot. For this purpose, optoelectronic sensors are often used, such as safety light grids or safety laser scanners. The workplace is either used by the operator or by the machine, and there is virtually no direct cooperation.
Die kooperative Zusammenarbeit von Mensch und Roboter wurde beispielsweise in einem Projekt "Team@work" der Fraunhofergesellschaft demonstriert. Die Sicherheit der Bedienperson wird dabei durch eine Abstandsüberwachung gewährleistet, die mittels mehrerer Kameras den jeweils kürzesten Abstand zwischen Bedienperson und Roboter ermittelt und die Roboterbewegung bei Unterschreiten des sicherheitstechnisch kleinsten zulässigen Abstands anhält. In der
Diesen Überlegungen ist jedoch gemeinsam, dass die beiden Beteiligte, also Mensch und Maschine, ihre Arbeitsschritte weitgehend unabhängig und parallel nebeneinander ausführen. Eine effektive Kommunikation zwischen Mensch und Maschine und damit eine echte Kooperation fehlt. Die einzige Kommunikationsschnittstelle besteht in Bildschirmen und Schalteinheiten an der Maschine. Mit solchen Schaltern zeigt die Bedienperson den Abschluss einer definierten Tätigkeit an und startet die Bewegung der Maschine. Schaltelemente müssen mit dem Arbeitsplatz mitbewegt oder mehrfach ausgeführt werden, um für die Bedienperson innerhalb des Arbeitsablaufes erreichbar zu bleiben.These considerations, however, have in common that the two parties, ie man and machine, perform their work largely independently and in parallel alongside each other. An effective communication between man and machine and thus a real cooperation is missing. The only communication interface consists of screens and switching units on the machine. With such switches, the operator indicates the completion of a defined activity and starts the movement of the machine. Switching elements must be moved with the workstation or executed several times in order to remain accessible to the operator within the workflow.
Dabei sind an Schnitten im Arbeitsablauf, die einer Interaktion zwischen Mensch und Maschine bedürfen, relativ starre Vorgaben zu erfüllen, um die Sicherheit zu gewährleisten, denn beispielsweise die Übergabe eines Werkstücks erfordert, dass die absichernden Sensoren vorübergehend eine enge Annäherung zwischen Mensch und Maschine tolerieren. Die Absicherung kann sich nicht allein an einem festen Zeitablauf orientieren, weil dies jede Korrektur bei Fehlern der Bedienperson oder des Werkstücks ausschließen würde.Relatively rigid specifications are to be met by cuts in the work process that require an interaction between man and machine in order to ensure safety, because, for example, the transfer of a workpiece requires that the securing sensors temporarily tolerate a close rapprochement between man and machine. The protection can not be based solely on a fixed timing, because this would preclude any correction in errors of the operator or the workpiece.
Die Bedienung erzwingt also zusätzliche Arbeitsschritte oder bringt zusätzliche Nachteile mit sich. Bekannt sind Zweihandschalter, deren Betätigung nur so möglich ist, dass sich keine Hand der Bedienperson im Gefahrenbereich befindet. Auch Fußschalter werden eingesetzt, doch verringern sie die Standsicherheit, belasten das Skelett einseitig und stellen mit ihren Zuleitungen Stolperfallen dar. Bildschirme zur Anzeige von Maschineninformationen befinden sich häufig an den Rändern der Maschine, sofern überhaupt erkennbare Darstellungen gegeben sind. Diese Trennung des Interaktionsbereiches am Werkstück und der Informations- und Steuereinrichtungen der Maschine, insbesondere wenn diese die Arbeitsschritte, Einlegerichtungen oder andere notwendige Informationen anzeigen, führt wegen der ständigen Kopfbewegungen und Akkommodation des Auges zur Ermüdung.The operation thus enforces additional steps or brings additional disadvantages. Are known two-hand switch whose operation is only possible so that there is no hand of the operator in the danger area. Footswitches are also used, but they reduce stability, load the skeleton unilaterally and trip with their leads. Screens for displaying machine information are often located at the edges of the machine, as long as recognizable representations are given. This separation of the interaction area on the workpiece and the information and control devices of the machine, especially when they indicate the work steps, insertion directions or other necessary information, leads to fatigue due to the constant head movements and accommodation of the eye.
Arbeitsplätze an Maschinen oder manuellen Montagestationen müssen einer Reihe von ergonomischen Standards und Richtlinien genügen. Viele Arbeitsplätze besitzen deshalb Verstellmöglichkeiten, etwa für die Anpassung von Sitz- und Greifhöhen. Teilweise ist aber eine individuelle Anpassung von Maschinen gar nicht möglich und der Arbeitsplatz nur für einen durchschnittlichen Menschen ausgelegt. In jedem Fall erfordert die Einstellung ein manuelles Eingreifen. Für die Ausführung von verschiedenen Arbeitsschritten bei größeren Bauteilen oder Halbfertigprodukten kann aber eine unterschiedliche Arbeitshöhe optimal sein, um biomechanische Hebel optimal zu nutzen und eine vorzeitige Ermüdung zu vermeiden. Dann sind auch manuelle Verstellungen zu zeitraubend und umständlich.Workplaces at machinery or manual assembly stations must meet a range of ergonomic standards and guidelines. Many workstations therefore have adjustment options, for example, for adjusting seat and reach heights. Sometimes, however, an individual adaptation of machines is not possible and the workplace is only designed for an average person. In any case, the setting requires manual intervention. However, to perform different operations on larger components or semi-finished products, a different working height may be optimal for optimally utilizing biomechanical levers and avoiding premature fatigue. Then manual adjustments too time-consuming and cumbersome.
Letztlich muss sich demnach der Mensch der Maschine oder den Arbeitsaufgaben anpassen und nicht umgekehrt. Gerade bei Einzelfertigungen werden die notwendigen Nebenzeiten zur Einrichtung des Arbeitsplatzes wegen des hohen Aufwands vermieden. Diese Herangehensweise widerspricht dem Prinzip der Ergonomie und eines gesunden und effektiven Arbeitens.Ultimately, therefore, the human must adapt to the machine or the work tasks and not vice versa. Especially with individual production, the necessary non-productive time to set up the workplace because of the high cost is avoided. This approach contradicts the principle of ergonomics and healthy and effective working.
Es ist bekannt, für die Absicherung einer Maschine gegen Unfälle mit Bedienpersonen mittels einem oder mehreren optischen Sensoren dreidimensionale Bilddaten zu erzeugen und auf deren Basis Gefahrensituationen zu erkennen. Beispielsweise ist in der
Derartige 3D-Sensoren sind meist als Kamera ausgebildet. Ein stereoskopisches Kamerasystem nimmt zwei oder mehr Bilder einer Szenerie aus unterschiedlichem Blickwinkel auf, ordnet Strukturen der verschiedenen Bilder einander zu und trianguliert aus der Disparität, also dem scheinbaren Versatz der Strukturen, und auf Basis der bekannten Perspektiven deren Entfernung. Bei einer Laufzeitkamera wird aktiv ein Lichtsignal ausgesandt und für jeden Pixel beispielsweise mittels Photonmischdetektion die Laufzeit bis zum Empfang des aus der Szenerie remittierten Lichts bestimmt. Wegen der bekannten und konstanten Lichtgeschwindigkeit liefert auch dies eine dreidimensionale Entfernungskarte. Es sind Bildsensoren bekannt, in deren intelligenten Pixel die Laufzeitbestimmung integriert ist.Such 3D sensors are usually designed as a camera. A stereoscopic camera system captures two or more images of a scene from different perspectives, arranges structures of the different images to each other and triangulates from the disparity, ie the apparent offset of the structures, and their distance based on the known perspectives. In a runtime camera, a light signal is actively transmitted and for each pixel, for example by means of photon mixing detection, the time until receipt of the light remitted from the scene is determined. Because of the known and constant speed of light, this also provides a three-dimensional distance map. Image sensors are known in whose intelligent pixels the transit time determination is integrated.
Aber auch Laserscanner oder Lichtgitter lassen sich zu dreidimensionale Sensoren weiterbilden. Dazu wird der Laserscanner, der üblicherweise nur eine Ebene abtastet, auch in der Senkrechten zu der üblichen Scanbewegung bewegt. Ein Lichtgitter kann tastend ausgebildet werden, besteht also aus entfernungsmessenden Lichttastern anstelle von einfachen Lichtschranken. Zur Entfernungsmessung werden dabei sowohl bei dem Laserscanner als auch bei dem Lichtgitter Lichtlaufzeitverfahren analog dem für eine Laufzeitkamera beschriebenen Verfahren eingesetzt.But even laser scanners or light grids can be further developed into three-dimensional sensors. For this purpose, the laser scanner, which usually scans only one plane, also moves in the vertical to the usual scanning movement. A light grid can be formed groping, so it consists of distance-measuring light sensors instead of simple light barriers. To measure the distance, both in the case of the laser scanner and in the light grid, the light transit time method is used in analogy to the method described for a runtime camera.
All diese Sicherheitseinrichtungen ermöglichen zwar die Überwachung dreidimensionaler Schutzfelder auf unzulässige Eingriffe. Für die Bedienperson ist aber der Schutzbereich nicht erkennbar, und es kommt deshalb immer wieder zu einer unbeabsichtigten Auslösung der Sicherheitseinrichtung. Dies führt zu mitunter erheblichen Produktionsstörungen, da zusätzlich zu dem Zeitverlust durch das Wiederanfahren der Maschine nach einem sicherheitsgerichteten Nothalt auch das Werkstück unbrauchbar wird oder zumindest nachbearbeitet werden muss.All these safety devices allow monitoring of three-dimensional protective fields for impermissible interventions. For the operator, however, the scope is not recognizable, and it therefore always comes back to an accidental release of the safety device. This sometimes leads to considerable production disruptions, since in addition to the loss of time due to the restarting of the machine after a safety-related emergency stop, the workpiece also becomes unusable or at least must be reworked.
Zur Visualisierung dreidimensionaler Bilddaten sind Datenbrillen oder HMDs (Head Mounted Displays) bekannt. Sie arbeiten zum Teil mit zumindest halbdurchsichtigen Anzeigen, die im Sichtfeld des Anwenders angeordnet werden, um die künstlichen Darstellungen einer natürlichen Szenerie zu überlagern. Eine noch fortschrittlichere Variante sind VRDs (Virtual Retinal Displays), die auf einer Brille sitzen und das Bild direkt auf die Netzhaut projizieren. Diese Art der Visualisierung findet in wissenschaftlichen Studien oder bei Militärpiloten Anwendung, jedoch nicht in der industriellen Fertigung.To visualize three-dimensional image data, data glasses or HMDs (Head Mounted Displays) are known. They work in part with at least semi-transparent displays arranged in the field of view of the user to superimpose the artificial representations of a natural scene. An even more advanced variant is VRDs (Virtual Retinal Displays), which sit on a pair of glasses and project the image directly onto the retina. This type of visualization is used in scientific studies or military pilots, but not in industrial production.
Aus der
Die
Es ist daher Aufgabe der Erfindung, die Zusammenarbeit zwischen Mensch und Maschine an einem kooperativen Arbeitsplatz bei voller Absicherung gegenüber Unfallgefahren zu verbessern.It is therefore an object of the invention to improve the cooperation between man and machine in a cooperative workplace with full protection against accident hazards.
Diese Aufgabe wird durch eine 3D-Sicherheitsvorrichtung gemäß Anspruch 1 sowie ein Verfahren zur Absicherung und Bedienung mindestens einer Maschine an einem kooperativen Arbeitsplatz gemäß Anspruch 15 gelöst. Dabei geht die Erfindung von dem Grundgedanken aus, dreidimensionale Bilddaten eines Sicherheitssensors nicht allein für die Absicherung, sondern auch für die Bedienung zu verwenden. Bestimmte Bewegungsmuster der Bedienperson werden erkannt und als Eingabe an den 3D-Sensor oder die Maschine interpretiert und weiterverarbeitet. So wird beispielsweise der 3D-Sensor angewiesen, in einen anderen Modus zu wechseln, einen anderen Sichtwinkel zu wählen, sich zu deaktivieren oder dergleichen. Statt wie herkömmlich Mensch und Maschine durch eine Sicherheitsvorrichtung voneinander zu trennen, wird so eine echte Kooperation erreicht.This object is achieved by a 3D security device according to claim 1 and a method for securing and operating at least one machine at a cooperative workstation according to claim 15. The invention is based on the basic idea of using three-dimensional image data of a safety sensor not only for the protection, but also for the operation. Certain movement patterns of the operator are recognized and interpreted as input to the 3D sensor or the machine and further processed. For example, the 3D sensor is instructed to switch to another mode, to choose a different viewing angle, to deactivate, or the like. Instead of separating man and machine by a safety device as usual, a real cooperation is achieved.
Bewegungsmuster sind dabei weit aufzufassen und schließen auch an sich statische Elemente wie eine Pose beziehungsweise eine Körperhaltung ein. Sowohl die Posen als auch die Bewegungen werden mit einem Toleranzspielraum erkannt, weil von einer menschlichen Bedienperson keine identischen Bewegungsabläufe und Körperhaltungen erwartet werden. Die Erkennung eines Bewegungsmusters erfolgt beispielsweise durch Klassifikation, also die gezielte Zuordnung zu einem von mehreren möglichen Bewegungsmustern.Movement patterns are to be understood broadly and include static elements such as a pose or posture. Both the poses and the movements are recognized with a margin of tolerance, because no identical movements and postures are expected from a human operator. The recognition of a movement pattern takes place, for example, by classification, that is, the specific assignment to one of several possible movement patterns.
Unter einem kooperativen Arbeitsplatz wird ein Bereich verstanden, in dem mindestens eine Bedienperson und mindestens eine Maschine, wie beispielsweise ein Roboter, eine Montagestation oder dergleichen, gleichzeitig tätig sind, wobei zumindest in einem Teil des Fertigungsprozesses Arbeitsergebnisse zwischen Mensch und Maschine ausgetauscht oder Arbeitsschritte gemeinsam erledigt werden.A cooperative workstation is understood to be an area in which at least one operator and at least one machine, such as a robot, an assembly station or the like, are active at the same time, at least in one part of the manufacturing process exchanging work results between man and machine or carrying out work steps together become.
Da manche Benutzereingaben sicherheitskritisch oder zumindest prozesskritisch, also entscheidend für das Arbeitsprodukt sind, ist denkbar, dass alle oder manche Bewegungsmuster nur nach einer besonderen Authentifizierung als Benutzereingabe akzeptiert werden. Diese Authentifizierung kann ganz herkömmlich als Eingabe eines Zahlencodes, Passworts oder Lesen einer Zugangskarte realisiert sein. Alternativ werden auch für die Authentifizierung Sensordaten in Form einer Personenerkennung oder eines besonderen Bewegungsmusters zur Freigabe herangezogen.Since some user inputs are critical to security or at least critical to the process, that is critical for the work product, it is conceivable that all or some movement patterns are accepted as user input only after a special authentication. This authentication can be realized conventionally as input of a numerical code, password or reading of an access card. Alternatively, sensor data in the form of a person recognition or a special movement pattern are used for the authentication for the authentication.
Die Erfindung hat den Vorteil, dass die Bedienung, also die Mensch-Maschine-Schnittstelle, vollständig mittels 3D-Technik in die sicherheitstechnische Lösung integriert wird. Die Kooperation der Bedienperson mit der Maschine wird als 3D-Schnittstelle aufgefasst. Dadurch ist eine einfache, intuitive Kommunikation für die Bedienperson möglich. Nebenzeiten und Nebentätigkeiten zur Einrichtung und Anpassung des Arbeitsplatzes werden reduziert. Die Produktivität wird erhöht und die ergonomische Anpassungen werden erleichtert. Damit verbessert sich sowohl die Qualität des Produkts als auch die Arbeitszufriedenheit.The invention has the advantage that the operation, ie the man-machine interface, is completely integrated into the safety-related solution by means of 3D technology. The cooperation of the operator with the machine is understood as a 3D interface. This allows a simple, intuitive communication for the operator. Ancillary and secondary activities to set up and adapt the workplace are reduced. Productivity is increased and ergonomic adjustments are made easier. This improves both the quality of the product and job satisfaction.
Bevorzugt ist eine Anzeigeeinrichtung vorgesehen, insbesondere ein Projektor oder eine Datenbrille, um der Bedienperson ein mit Zusatzinformationen überlagertes Bild des Arbeitsplatzes zu präsentieren, wobei die Zusatzinformationen insbesondere die Darstellung eines Werkstücks, eine vorgesehene Position, Pose oder Bewegung der Bedienperson und/oder ein Schutzfeld umfassen. Die Anzeige erfolgt noch bevorzugter dreidimensional. Die Bedienperson erkennt daraus beispielsweise die notwendige Einlegerichtung für ein Werkstück, ihre eigene dafür vorgesehene Position und Körperhaltung oder die aktuellen Grenzen eines Gefahrenbereichs. Eine Datenbrille ist hier als Stellvertreter für alle HMDs oder ähnliche Anzeigemittel genannt, die mit dem Körper verbunden getragen werden, um dem Auge ein Bild zu präsentieren, das mit dem natürlichen Sichtfeld überlagert werden kann. Die Anzeigeeinrichtung kommuniziert bevorzugt drahtlos mit der Auswertungseinrichtung und ist in einen ohnehin getragenen Schutzhelm oder eine Schutzbrille integriert.Preferably, a display device is provided, in particular a projector or a data glasses, in order to present the operator with an additional information superimposed image of the workplace, the additional information in particular the representation of a workpiece, a proposed position, pose or movement of the operator and / or include a protective field , The display is even more preferable three-dimensional. The operator recognizes, for example, the necessary insertion direction for a workpiece, their own designated position and posture or the current limits of a danger zone. A pair of smart glasses is hereby referred to as a proxy for all HMDs or similar display means that are worn attached to the body to present to the eye an image that can be overlaid with the natural field of view. The display device preferably communicates wirelessly with the evaluation device and is integrated into an already worn protective helmet or goggles.
Die Anzeigeeinrichtung ist bevorzugt dafür ausgebildet, Bedienelemente in den Arbeitsplatz einzublenden, insbesondere virtuelle Schalter oder Regler. Der 3D-Sensor erkennt Bewegungsmuster der Bedienperson als Benutzereingabe. Für die Betätigung virtueller Schalter kommt es deshalb letztlich darauf an, ein Körperteil an eine bestimmte Stelle zu bringen und dort gegebenenfalls eine bestimmte Bewegung auszuführen. Diese Bewegung kann eine Geste insbesondere aus dem Fingeralphabet sein. Damit aber auch die Bedienperson weiß, welche Bewegung von ihr erwartet wird, werden diese Bedienelemente dargestellt, so dass die Bedienperson sie beispielsweise über die Positionierung der Hände in dem derart kenntlich gemachten Schalterbereich aktiviert. Herkömmliche Schalter an der Maschine werden dadurch entbehrlich, und die virtuellen Schalter können stets ergonomisch, für die Bedienperson gut erreichbar angezeigt werden. Ein besonders sicherheitsrelevantes Bedienelement ist ein virtueller Notausschalter, der beispielsweise als visueller Ring um einen bestimmten Bereich gezeigt wird. Ebenso denkbar ist ein optischer Zweihandschalter.The display device is preferably designed to display operating elements in the workstation, in particular virtual switches or controllers. The 3D sensor detects motion patterns of the operator as user input. For the operation of virtual switches, therefore, it is ultimately important to bring a body part to a specific point and there possibly perform a certain movement. This movement can be a gesture, especially from the finger alphabet. But so that the operator knows what movement is expected of her, these controls are displayed so that the operator activates them, for example, on the positioning of the hands in the thus marked switch area. This eliminates the need for conventional switches on the machine, and the virtual switches can always be displayed ergonomically, easily accessible to the operator. A particularly safety-relevant operating element is a virtual emergency stop switch, which is shown, for example, as a visual ring around a specific area. Also conceivable is an optical two-hand switch.
Die Auswertungseinheit ist bevorzugt dafür ausgebildet, einen Unterschied zwischen einem Sollzustand und einem Istzustand zu erkennen und mittels der Anzeigeeinrichtung anzuzeigen. Ein Sollzustand ist beispielsweise die erforderliche Art und Form eines Werkstücks, dessen Position und Orientierung, die Position und Körperhaltung der Bedienperson oder deren Bewegungsablauf für einen auszuführenden Arbeitsschritt. Die Anzeige kann als farbliche Markierung erfolgen. Für Farbenblinde ist sowohl die Farbe wählbar als auch eine andere Strukturierung möglich. Die Bedienperson erkennt so rasch, ob mit dem Werkstück oder dem Arbeitsablauf etwas nicht stimmt, und kann dies frühzeitig korrigieren.The evaluation unit is preferably configured to detect a difference between a desired state and an actual state and to display it by means of the display device. A desired state is, for example, the required type and shape of a workpiece, its position and orientation, the position and posture of the operator or their sequence of movements for a work step to be performed. The display can be made as a color mark. For color blinds, both the color is selectable and a different structuring possible. The operator recognizes so quickly whether something is wrong with the workpiece or the workflow, and can correct this early.
Die Auswertungseinheit ist noch bevorzugter dafür ausgebildet, einen Arbeitsschritt der Maschine so lange zu verweigern, bis Sollzustand und Istzustand übereinstimmen. Damit kann eine Qualitätssicherung erfolgen. So wird etwa geprüft, ob das richtige Werkstück in der richtigen Weise eingelegt wurde. Nur dann ist eine Auslösung des nachfolgenden automatischen Arbeitsschrittes möglich. Die Übereinstimmung wird jeweils nur in einem praktisch relevanten Maß gefordert. Eine andere Möglichkeit besteht in einer Überprüfung der Vollständigkeit vor einer Taktauslösung beispielsweise bei Füge- oder Montageaufgaben.The evaluation unit is even more preferably configured to refuse a work step of the machine until the desired state and actual state coincide. This can be a quality assurance. For example, it checks whether the correct workpiece has been inserted in the correct way. Only then is it possible to trigger the subsequent automatic work step. The agreement is required only in a practically relevant measure. Another possibility is to check the completeness before a clock release, for example, in joining or assembly tasks.
Die Auswertungseinheit ist bevorzugt dafür ausgebildet, als Bewegungsmuster Gesten oder Körperhaltungen, insbesondere Handbewegungen zu erkennen. Beispielsweise werden bestimmte Gesten virtuellen Schaltern zugeordnet. Diese Art, einen Schalter beispielsweise mittels Wischen zu bedienen, kann alternativ oder kumulativ zur Einblendung von Schaltelementen mittels der Anzeigeeinrichtung genutzt werden. Durch eine Gestensteuerung lassen sich analog der Gebärdensprache auch komplexe Befehle geben. Ein Bewegungsmuster ist gegenüber einer Geste der übergeordnete Begriff, weil ein Bewegungsmuster zusätzlich zu Gesten auch einen Positionswechsel und den ganzen Körper einbeziehende Bewegungen umfasst. Je näher die erkannten Bewegungsmuster an aus dem Alltag bekannte Gesten angelehnt sind, desto intuitiver wird die Bedienung. Alle in dieser Beschreibung genannten Gesten sind nur Beispiele, die Erfindung ist darauf nicht beschränkt. Die direkte Interaktion mit der Maschine ermöglicht eine manuelle Handhabung des Werkstückes und damit die Einsparung von Supporteinrichtungen, weil die üblichen Ablagen oder Formteile entfallen können. Das Werkstück wird eingelegt und manuell fixiert und anschließend der Bearbeitungsvorgang durch eine bestimmte Geste ausgelöst, wie eine bestimmte räumliche Handposition für die beiden Hände.The evaluation unit is preferably designed to detect gestures or postures, in particular hand movements, as movement patterns. For example, certain gestures are assigned to virtual switches. This way of operating a switch, for example by means of wiping, can be used alternatively or cumulatively for the insertion of switching elements by means of the display device. A gesture control can be analogous to the sign language give even complex commands. A movement pattern is the superordinate term compared to a gesture, because a movement pattern in addition to gestures also includes a change of position and movements involving the whole body. The closer the detected movement patterns are to everyday gestures, the more intuitive the operation becomes. All gestures mentioned in this description are only examples, the invention is not limited thereto. The direct interaction with the machine allows manual handling of the workpiece and thus the saving of support facilities, because the usual shelves or moldings can be omitted. The workpiece is inserted and manually fixed and then triggered the machining process by a specific gesture, such as a specific spatial hand position for the two hands.
Die Auswertungseinheit ist bevorzugt dafür ausgebildet, Bewegungsmuster für das Heben oder Senken eines Maschinenteils oder die Einstellung eines Abstands zwischen Bedienperson und Maschinenteil zu erkennen und das Maschinenteil entsprechend zu bewegen. Derartige Bewegungsmuster bestehen beispielsweise angelehnt an die Handzeichen eines Einweisers aus einem Herabsenken oder Anheben beider nach unten beziehungsweise nach oben gerichteter Handflächen oder der Anzeige eines Abstands zwischen den zueinander gerichteten Handflächen.The evaluation unit is preferably designed to detect movement patterns for the lifting or lowering of a machine part or the setting of a distance between the operator and the machine part and to move the machine part accordingly. Such movement patterns consist, for example, based on the hand signals of a referrer from a lowering or raising of both downward or upward facing palms or the display of a distance between the mutually facing palms.
Die Auswertungseinheit ist bevorzugt dafür ausgebildet, Bewegungsmuster zum Auslösen oder Beenden eines automatischen Arbeitsschritts zu erkennen und die Maschine entsprechend zum Ausführen oder Anhalten des Arbeitsschritts anzusteuern, wobei ein Bewegungsmuster insbesondere eine Notausgeste oder eine Körperhaltung zur Bedienung einer virtuellen Zweihandschaltung ist. Dazu dienen beispielsweise Gesten wie der nach oben oder unten gerichtete Daumen oder das zwischen Daumen und Zeigefinger geformte OK-Zeichen. Es kann eine besondere Notfallgeste für einen Nothalt definiert werden, die besonders robust erkennbar und besonders einfach auszuführen sein sollte und zugleich ausschließt, dass die Bedienperson dieses Bewegungsmuster zufällig ausführt. Ein Beispiel ist das abwehrende Vorstrecken beider Hände. Auch ein Zweihandschalter lässt sich als Bewegungsmuster interpretieren. Dabei wird die Position der Hände und möglicherweise auch des Kopfes überwacht, so dass sichergestellt ist, dass zumindest diese Körperteile nicht von dem nachfolgenden Arbeitsschritt gefährdet werden.The evaluation unit is preferably designed to recognize movement patterns for triggering or terminating an automatic work step and to control the machine accordingly for executing or stopping the work step, wherein a movement pattern is in particular an emergency release or a posture for operating a virtual two-hand circuit. For example, gestures such as the thumb pointing up or down or the OK mark formed between the thumb and forefinger are used. It can be defined a special emergency gesture for emergency stop, which should be particularly robust recognizable and particularly easy to do and at the same time precludes that the operator performs this movement pattern randomly. An example is the defensive Vorstrecken both hands. A two-hand switch can also be interpreted as a movement pattern. In this case, the position of the hands and possibly also of the head is monitored, so that it is ensured that at least these body parts are not endangered by the subsequent work step.
Die Auswertungseinheit ist bevorzugt dafür ausgebildet, Bewegungsmuster zum Zurückdrängen eines Maschinenteils zu erkennen und das Maschinenteil entsprechend zu bewegen. Dazu dient ein besonderes Bewegungsmuster, beispielsweise eine Geste analog dem Verscheuchen einer Fliege. Statt also bei Annäherung an die Gefahrenquelle einen Notstopp auszulösen, wird so ermöglicht, das Maschinenteil, etwa eine Achse eines Roboters, zum Zurückweichen zu bewegen. Solange keine Gefährdung erkannt wird und kein Schutzfeld verletzt ist, kann das Zurückziehen des Maschinenteils auch verzögert werden, um zunächst einen automatischen Arbeitsschritt abzuschließen.The evaluation unit is preferably designed to detect movement patterns for pushing back a machine part and to move the machine part accordingly. This is a special movement pattern, such as a gesture analogous to the scare away a fly. So instead of triggering an emergency stop when approaching the source of danger, it is thus possible to move the machine part, such as an axis of a robot, to retreat. As long as no danger is detected and no protective field is injured, the retraction of the machine part can also be delayed to complete an automatic work step first.
Der Unterschied zwischen Verscheuchen und Notstopp kann den Konflikt zwischen Prozesssicherheit und Gefahrensituation lösen. Greift die Bedienperson in den Schutzbereich ein, ist ein Notstopp erforderlich, der zu Qualitätsproblemen führen kann. Der Eingriff erfolgt aber mitunter, um Korrekturen auszuführen. Hierzu kann aufgrund der Verscheuchen-Geste der Teilschritt abschlossen werden, die Achse zieht sich dann zurück, und die Korrektur kann erfolgen. Anschließend wird der Arbeitsschritt mittels einer Startgeste wieder gestartet und abgeschlossen. Hierzu dient ein Heranwinken. Soll die Achse ihre Position ändern, so wird mit dem Zeigefinger in die jeweilige Richtung gewiesen werden. Die Dauer dieser Geste entscheidet dabei über den zurückgelegten Weg.The difference between scare and emergency stop can solve the conflict between process safety and dangerous situations. If the operator interferes with the protection area, an emergency stop is required, which can lead to quality problems. The intervention is sometimes done to make corrections. For this purpose, due to the scare gesture, the sub-step can be completed, the axis then retracts, and the correction can be made. Subsequently, the step is restarted and completed by means of a start gesture. This purpose is a Heranwinken. If the axis is to change its position, the index finger points in the respective direction. The duration of this gesture decides the distance traveled.
Die Auswertungseinheit ist bevorzugt für einen Konfigurationsmodus ausgebildet, in dem Bewegungsmuster einer bestimmten Bedienperson eingelernt und Bedienelementen oder Benutzereingaben zugeordnet werden. Dies ist eine Art "3D-Customizing". Durch Anpassung des "look and feel", also der Gestaltungs-, Farb- und Strukturelemente, ist die durch die Erfindung realisierte 3D-Schnittstelle an individuelle Vorlieben der Bedienperson anpassbar. Aber auch individuelle Besonderheiten mit besonders großer Auswirkung auf die Ergonomie, wie Rechts- oder Linkshändigkeit, oder Körpergröße oder körperliche Beeinträchtigungen werden berücksichtigt. Die Bewegungsmuster sind individuell einlernbar, um eine robuste Erkennung und eine für die jeweilige Bedienperson intuitive und einfache Steuerung zu erreichen. Schließlich können bestimmte Steuerungsmöglichkeiten freigeschaltet oder inaktiv gesetzt werden.The evaluation unit is preferably designed for a configuration mode in which movement patterns of a specific operator are taught in and control elements or user inputs are assigned. This is a kind of "3D Customizing". By adapting the "look and feel", ie the design, color and structure elements, the 3D interface realized by the invention can be adapted to individual preferences of the operator. But also individual peculiarities with particularly great impact on the ergonomics, such as right or left handedness, or height or physical impairments are considered. The movement patterns are individually teachable to achieve a robust recognition and an intuitive and simple control for each operator. Finally, certain control options can be enabled or disabled.
Die Auswertungseinheit ist bevorzugt für einen Kalibrierungsmodus ausgebildet, in dem der Arbeitsplatz und die Maschine an die Bedienperson angepasst wird, insbesondere indem die Handhöhe oder die Kopfhöhe bestimmt und daraufhin eine ergonomische Höhenanpassung des Arbeitsplatzes und/oder einer ergonomische Präsentation von Werkstücken durch die Maschine an die Bedienperson erfolgt. Durch diesen Abgleich zwischen der Präsentation des Werkstücks, des Arbeitstisches und der Standfläche der Bedienperson werden Zwangshaltungen vermieden und biomechanische Hebel der Bedienperson optimal genutzt. Da eine Anpassung der Tischhöhe die Werkstücklogistik erschwert, ist alternativ eine Anpassung der Höhe der Standfläche möglich. Die Kalibrierung erfolgt beispielsweise auf Grundlage der Handposition, indem die aktuelle Handhöhe der präsentierten Hände gemessen wird und die Höhenelemente des Arbeitsplatzes darauf abgestimmt werden. Ebenso ist denkbar, die Körpergröße auf Grundlage der Kopfhöhe zu verwenden. Die Kalibrierung kann bei Schichtbeginn erfolgen oder jederzeit aktiviert werden, um eine optimale Anpassung an die Statur der aktuell tätigen Bedienperson sicherzustellen. Auch die Speicherung in einem Nutzerprofil ist möglich.The evaluation unit is preferably designed for a calibration mode in which the workstation and the machine are adapted to the operator, in particular by determining the hand height or the head height and then an ergonomic height adjustment of the workplace and / or an ergonomic presentation of workpieces by the machine to the Operator takes place. By this comparison between the presentation of the workpiece, the work table and the footprint of the operator forced postures are avoided and biomechanical levers of the operator used optimally. Since an adjustment of the table height makes the workpiece logistics more difficult, it is alternatively possible to adapt the height of the standing surface. Calibration is based, for example, on the hand position by measuring the current hand height of the hands presented and adjusting the height elements of the workstation. It is also conceivable to use the body size based on the head height. The calibration can be done at the beginning of the shift or activated at any time to ensure an optimal adaptation to the stature of the current operator. The storage in a user profile is possible.
Nicht nur der Arbeitsplatz an sich, sondern auch die Präsentation der Werkstücke wird so an die Bedienperson angepasst. Gerade bei schweren Werkstücken werden Hebehilfen eingesetzt, es wird mit Robotern interagiert, oder die Montage erfolgt auf rollenden Werkbänken. Dabei sollte sich das Werkstück stets in einer ergonomischen Arbeitshöhe befinden, die von der Bedienperson abhängt und der Sicherheitsvorrichtung aufgrund der Kalibrierung bekannt ist. Wird auch noch die bevorzugte Arbeitshand spezifiziert, so kann die Werkstückpräsentation beispielsweise über einen Anstellwinkel zu der Bedienperson weiter optimiert werden.Not only the workplace itself, but also the presentation of the workpieces is adapted to the operator. Especially for heavy workpieces, lifting aids are used, it is interacted with robots, or the assembly takes place on rolling workbenches. The workpiece should always be at an ergonomic working height, which depends on the operator and the safety device is known due to the calibration. If the preferred working hand is also specified, the workpiece presentation can be further optimized, for example, via an angle of attack to the operator.
Die Auswertungseinheit ist bevorzugt dafür ausgebildet, eine Gefährdung der Bedienperson anhand eines unzulässigen Eingriffs in einen Schutzbereich innerhalb des Arbeitsplatzes zu erkennen. Eine Gefahrensituation wird demnach immer dann erkannt, wenn ein Eingriff in ein Schutzfeld erfolgt. Das erleichtert die Gefahrenerkennung. Von unzulässigen Eingriffen sind zulässige Eingriffe zu unterscheiden, beispielsweise durch die Maschine oder ein Werkstück. Kann die Sicherheitsvorrichtung Schutzfeldeingriffe solchen bekannten Objekten zuordnen und ist ein solcher Schutzfeldeingriff im Prozess vorgesehen, so muss keine Absicherung erfolgen.The evaluation unit is preferably designed to detect a hazard to the operator based on an unauthorized intervention in a protected area within the workplace. A dangerous situation is therefore always recognized when an intervention in a protective field takes place. This facilitates danger detection. Inadmissible interventions must be distinguished from permissible interventions, for example by the machine or a workpiece. If the safety device can assign protective field interventions to such known objects and if such interception of the protective field is provided for in the process, then no protection must be provided.
Die Schutzbereiche werden dabei noch bevorzugter dynamisch an ein derzeit bearbeitetes Werkstück angepasst. Die dynamische Anpassung berücksichtigt demnach nicht nur das bewegte Maschinenteil, sondern auch das Werkstück, welches beispielsweise aufschwenken könnte. Andererseits ist bei kleinen Werkstücken eine Reduktion des Schutzbereiches möglich, wohingegen ohne Berücksichtigung des Werkstücks das Schutzfeld entsprechend dem Maximalfall auszulegen wäre. Je kleiner die Schutzfelder bei weiterhin garantierter Absicherung sind, desto weniger wird die Bedienperson hierdurch eingeschränkt, und desto weniger unnötige Abschaltungen verringern die Verfügbarkeit.The protection areas are even more preferably dynamically adapted to a currently machined workpiece. The dynamic adaptation accordingly takes into account not only the moving machine part, but also the workpiece, which could swing up, for example. On the other hand, with small workpieces, a reduction of the protection range is possible, whereas without consideration of the workpiece, the protective field would have to be interpreted according to the maximum case. The smaller the protective fields are, with continued guaranteed protection, the less the operator is thereby restricted, and the less unnecessary shutdowns reduce the availability.
Die Anzeigeeinrichtung ist bevorzugt dafür ausgebildet, der Bedienperson die Schutzfelder darzustellen. Dies gilt sowohl für eine Konfigurationsphase, in denen Schutzfelder eingerichtet werden, als auch für den eigentlichen Betrieb. Während der Konfiguration, die durch eine eher komplexe Authentifizierungsgeste eingeleitet wird, wird die Hand längs den gewünschten Schutzfeldgrenzen mit einer bestimmten Fingerstellung bewegt. Durch eine weitere Geste, beispielsweise doppeltes Antippen mit dem Zeigefinger, kann eine bestehende Schutzfeldgrenze angewählt und anschließend durch Heranwinken oder Fortschieben beziehungsweise virtuelles Anfassen und Positionieren verändert werden. Dabei gibt die Anzeigeeinrichtung jeweils visuelle Rückmeldung über den Arbeitsfortschritt und die aktuelle Eingabe. Während des Betriebs werden die aktiven Schutzfelder eingeblendet, um versehentliche Eingriffe der Bedienperson zu reduzieren. Gerade bei dynamisch an die aktuelle Situation angepassten Schutzfeldern wäre ohne eine solche Anzeige nicht immer klar, welche Bereiche die Sicherheitsfunktion auslösen, so dass die Bedienperson unnötige Sicherheitsabstände einhält und damit in ihrer Bewegungsfreiheit eingeschränkt wird.The display device is preferably designed to represent the operator the protective fields. This applies both to a configuration phase in which protective fields are set up, as well as for the actual operation. During the configuration, which is initiated by a rather complex authentication gesture, the hand is moved along the desired protective field boundaries with a certain finger position. By a further gesture, for example, double tapping with the index finger, an existing protective field boundary can be selected and then changed by hitching or pushing or virtual touch and positioning. In each case, the display device gives visual feedback about the work progress and the current input. During operation, the active protective fields are displayed to reduce accidental intervention by the operator. Especially with dynamically adapted to the current situation protected fields would not always be clear which areas trigger the safety function without such a display, so that the operator observes unnecessary safety distances and thus restricted in their freedom of movement.
Die Auswertungseinheit ist bevorzugt dafür ausgebildet, Konturen von Objekten, die unzulässig in ein Schutzfeld eingreifen, mittels der Anzeigeeinrichtung optisch hervorzuheben. Dazu wird beispielsweise mit einer Blinkfunktion auf ganze Objekte oder nur Störkonturen hingewiesen, die sich noch im Schutzbereich befinden. Mit diesen klaren Hinweisen lässt sich rasch die Störungsursache einer sicherheitsgerichteten Abschaltung finden und beseitigen, und die Verfügbarkeit verbessert sich.The evaluation unit is preferably designed to visually emphasize contours of objects that inadmissibly engage in a protective field by means of the display device. For this purpose, for example, with a flashing function on whole objects or only interference contours are pointed out, which are still in the protection area. With these clear indications, you can quickly find and eliminate the cause of a safety-related trip, and availability improves.
Die Auswertungseinheit ist bevorzugt dafür ausgebildet, bei Ausgabe eines Abschaltbefehls die dreidimensionalen Bilddaten zu speichern. Damit wird dokumentiert, wie es zu dem Nothalt kommen konnte, um einen Unfallhergang zu rekonstruieren oder den Ablauf zukünftig zu optimieren. Die Bilder können natürlich darüber hinaus auch ständig aufgezeichnet und beispielsweise in einer Sicherheitszentrale visualisiert werden.The evaluation unit is preferably designed to store the three-dimensional image data when a shutdown command is issued. This documents how the emergency stop could come about in order to reconstruct an accident or to optimize the process in the future. Of course, the images can also be constantly recorded and visualized in a security center, for example.
Das erfindungsgemäße Verfahren kann auf ähnliche Weise weitergebildet werden und zeigt dabei ähnliche Vorteile. Derartige vorteilhafte Merkmale sind beispielhaft, aber nicht abschließend in den sich an die unabhängigen Ansprüche anschließenden Unteransprüchen beschrieben.The method according to the invention can be developed in a similar manner and shows similar advantages. Such advantageous features are described by way of example but not exhaustively in the subclaims following the independent claims.
Die Erfindung wird nachstehend auch hinsichtlich weiterer Merkmale und Vorteile beispielhaft anhand von Ausführungsformen und unter Bezug auf die beigefügte Zeichnung näher erläutert. Die Abbildungen der Zeichnung zeigen in:
- Fig. 1
- eine schematische dreidimensionale Darstellung eines kooperativen Arbeitsplatzes mit einer erfindungsgemäßen 3D-Sicherheitsvorrichtung; und
- Fig. 2
- eine Darstellung gemäß
Figur 1 zu einem anderen Zeitpunkt des Fertigungsablaufs.
- Fig. 1
- a schematic three-dimensional representation of a cooperative workstation with a 3D security device according to the invention; and
- Fig. 2
- a representation according to
FIG. 1 at another point in the production process.
Die 3D-Sicherheitsvorrichtung 10 weist einen 3D-Sensor 20 auf, der als Stereoskopiekamera ausgebildet ist. Die Erfindung ist aber unabhängig von der Art, mit der dreidimensionale Bilddaten gewonnen werden, und umfasst auch andere 3D-Sensoren einschließlich der einleitend genannten Laserscanner und Lichtlaufzeitkameras. Es ist denkbar, eine zusätzliche, in der
Die 3D-Sicherheitsvorrichtung 10 ist weiterhin mit einem Projektor 30 ausgerüstet, mit dem visuelle Informationen auf den Arbeitsplatz 12 projiziert werden. Eine Auswertungseinheit 40 ist mit dem 3D-Sensor 20 und dem Projektor 30 verbunden und mit der Steuerung und Auswertung der 3D-Sicherheitsvorrichtung 10 befasst. Durch diese Kombination können sowohl Daten und Informationen dargestellt als auch Steuerbefehle ausgelöst werden. Es können auch mehrere 3D-Sensoren 20 und/oder mehrere Projektoren 30 eingesetzt werden, beispielsweise um einen größeren Arbeitsbereich abzudecken oder schlechte Sicht- und Projektionswinkel beziehungsweise Abschattungen zu kompensieren.The
In dem 3D-Sensor 20 sind zwei Kameramodule 21a-b in einem bekannten festen Abstand zueinander montiert und nehmen jeweils Bilder des Arbeitsplatzes 12 auf. In jeder Kamera ist ein Bildsensor 22a-b vorgesehen, üblicherweise ein matrixförmiger Aufnahmechip, der ein rechteckiges Pixelbild aufnimmt, beispielsweise ein CCD- oder ein CMOS-Sensor. Den Bildsensoren 22a-b ist je ein Objektiv 23a-b mit einer abbildenden Optik zugeordnet, welche in der Praxis als jedes bekannte Abbildungsobjektiv realisiert sein können. Der Sichtwinkel dieser Optiken ist in
In der Mitte zwischen den beiden Bildsensoren 22a-b ist eine Beleuchtungseinheit 25 vorgesehen, wobei diese räumliche Anordnung nur als Beispiel zu verstehen ist und die Beleuchtungseinheit ebenso asymmetrisch oder sogar außerhalb des 3D-Sensors 10 angeordnet sein kann. Diese Beleuchtungseinheit 25 weist eine Lichtquelle 26, beispielsweise einen oder mehrere Laser oder LED sowie ein Mustererzeugungselement 27 auf, das beispielsweise als Maske, Phasenplatte oder diffraktives optisches Element ausgebildet ist. Somit ist die Beleuchtungseinheit 25 in der Lage, den Raumbereich 12 mit einem strukturierten Muster auszuleuchten. Das strukturierte Beleuchtungsmuster erleichtert die stereoskopische Gewinnung von 3D-Bilddaten, sollte aber vorzugsweise für die Bedienperson 14 unsichtbar beispielsweise im infraroten Spektrum liegen. Es sind auch Ausführungsformen mit homogener Beleuchtung oder solche denkbar, die ohne Beleuchtungseinheit 25 allein mit dem Umgebungslicht auskommen.In the middle between the two
Mit den beiden Bildsensoren 21a-b ist eine Stereoskopie-Auswertungseinheit 28 verbunden, welche Bilddaten der Bildsensoren 21a-b empfängt und daraus mit Hilfe einer stereoskopischen Disparitätsschätzung dreidimensionale Bilddaten des Arbeitsplatzes 12 berechnet. Das strukturierte Beleuchtungsmuster sorgt dabei für einen guten Kontrast und eine eindeutig zuordenbare Struktur jedes Bildelements des beleuchteten Arbeitsplatzes 12.Connected to the two
Im von dem Sicherheitssensor 10 überwachten Raumbereich 12 können sich bekannte und unerwartete Objekte befinden. Dabei kann es sich beispielsweise wie dargestellt um einen Roboterarm 32, aber auch eine sonstige Maschine, eine Bedienperson und anderes handeln. Der Raumbereich 12 bietet Zugang zu einer Gefahrenquelle, sei es weil es ein Zugangsbereich ist oder weil sich eine gefährliche Maschine, wie der Roboterarm 32, in dem Raumbereich 12 selbst befindet. Um diese Gefahrenquelle abzusichern, können ein oder mehrere virtuelle Schutz- und Warnfelder 34 konfiguriert werden. Sie bilden einen virtuellen Zaun um die gefährliche Maschine 32. Aufgrund der dreidimensionalen Auswertung ist es möglich, Schutz- und Warnfelder 34 dreidimensional zu definieren, so dass eine große Flexibilität entsteht.The
Der 3D-Sensor 20 gibt die dreidimensionalen Bilddaten an die Auswertungseinheit 40 aus. In einer Bewegungsmuster-Erkennungseinheit 41 der Auswertungseinheit 40 wird die Bedienperson 14 innerhalb der dreidimensionalen Bilddaten identifiziert und ihre Position, Bewegungsbahn und Körperhaltung bestimmt. Je nach Anforderung der Anwendung werden Gesten und Posen eher grob nur des gesamten Körpers bis hin zu einer feinen Erkennung einzelner Fingerbewegungen aufgelöst. Möglichkeiten der Erkennung von 3D-Bewegungsmustern sind an sich bekannt und beispielsweise in der einleitend genannten
Wird ein Bewegungsmuster erkannt, das einem voreingestellten oder eingelernten Bewegungsmuster entspricht, so interpretiert die Auswertungseinheit 40 dies als eine Benutzereingabe analog der Betätigung eines Schalters oder Reglers. Die Auswertungseinheit 40 führt dann den für das Bewegungsmuster vorgesehenen Befehl oder Vorgang aus oder leitet ein entsprechendes Signal an den 3D-Sensor 20, den Projektor 30 oder über eine nicht dargestellte Verbindung, die auch drahtlos oder mittelbar über eine Anlagensteuerung realisiert sein kann, an die Maschine 16 weiter.If a movement pattern is detected which corresponds to a preset or learned movement pattern, the
Für Befehle an den Projektor 30 ist in der Auswertungseinheit 40 eine Anzeigensteuerung 42 vorgesehen. Damit können Bedienelemente auf den Arbeitsplatz projiziert, Rückbestätigungen für Eingaben und ganz allgemein Daten und Informationen für die Bedienperson 14 visualisiert werden. Eine wichtige Information für die Bedienperson 14 sind Schutzfelder 50, in die aus Sicherheitsgründen nicht eingegriffen werden darf, wobei in
Diese Schutzfelder 50 werden in einer Schutzfeld-Auswertungseinheit 43 der Auswertungseinheit 40 auf unzulässige Eingriffe ausgewertet. Die Auswertungsregeln können beispielsweise vorschreiben, dass in Schutzfeldern 50 überhaupt kein Objekt vorhanden sein darf. Flexiblere Auswertungsregeln sehen vor, zwischen erlaubten und nicht erlaubten Objekten zu differenzieren, etwa anhand von Bewegungsbahnen, Mustern oder Konturen, Geschwindigkeiten oder allgemeinen Arbeitsabläufen, die sowohl vorab als erlaubt eingelernt als auch anhand von Bewertungen, Heuristiken oder Klassifikationen noch während des Betriebs eingeschätzt werden.These
Die Schutzfeld-Auswertungseinheit 43 kennt das Bewegungsverhalten der Bedienperson 14 von der Bewegungsmuster-Erkennungseinheit 41. Ganz analog kann auch das Bewegungsmuster der Maschine 16 durch den 3D-Sensor 20 erkannt werden. Alternativ oder zusätzlich stehen für das Bewegungsmuster der Maschine 16 auch die Daten der Maschinensteuerung zur Verfügung. Damit sind hoch flexible Schutzfelder 50 möglich, die an die jeweilige Situation angepasst sind.The protective
Erkennt die Schutzfeld-Auswertungseinheit 43 einen unzulässigen Eingriff in ein Schutzfeld 50, so wird über einen Sicherheitsausgang 44 (OSSD, Output Signal Switching Device) oder ein Sicherheitsnetzwerk die Maschine 16 gestoppt, gebremst oder in eine sichere Position bewegt. Um für sicherheitstechnische Anwendungen geeignet zu sein, ist die Sicherheitsvorrichtung 10 fehlersicher ausgelegt. Dies bedeutet unter anderem, dass der 3D-Sensor 10 und die Auswertungseinheit 40 sich selber, auch in Zyklen unterhalb der geforderten Ansprechzeit, testen kann und dass der Sicherheitsausgang 44 sicher, beispielsweise zweikanalig ausgelegt ist. Ebenso sind auch zumindest alle mit sicherheitsrelevanten Auswertungen Einheiten selbstsicher, werten also zweikanalig aus oder verwendet Algorithmen, die sich selbst prüfen können. Derartige Sicherheitsvorschriften sind für allgemeine berührungslos wirkende Schutzeinrichtungen in der EN 61496-1 bzw. der IEC 61496 normiert sowie in der DIN EN ISO 13849 und EN 61508 normiert. Eine entsprechende Norm für Sicherheitskameras befindet sich in der Vorbereitung. Die Bewegungsmuster-Erkennungseinheit 41 und die Anzeigensteuerung 42 sowie der Projektor 30 müssen nicht notwendig so streng aufgebaut und überwacht werden, da hier ein Ausfall zu keiner Unfallgefahr führt.If the protective
Anstelle eines Projektors 30 wird in einer weiteren, nicht dargestellten Ausführungsform eine Datenbrille beziehungsweise ein HMD eingesetzt. Die Datenbrille wird drahtlos von der Anzeigensteuerung 42 angesteuert und stellt die Informationen der Auswertungseinheit 40 der Bedienperson 14 so dar, dass sich das natürliche Bild und die künstlichen Informationen überlagern. Dies geschieht entweder, indem die Datenbrille weiterhin die Sicht auf die Szenerie zulässt, oder indem eine weitere Kamera am Kopf der Bedienperson den Arbeitsplatz 12 aus deren Perspektive aufnimmt und elektronisch zu einer überlagerten dreidimensionalen Ansicht verarbeitet. Dabei können sogar noch zur Erleichterung für die Bedienperson irrelevante Bildelemente ausgeblendet werden, beispielsweise ferne Objekte. Als weiteres Beispiel künstlich veränderter Bilddaten könnte eine gefährdende Bewegung der Maschine 16 optisch vorweggenommen werden, um ein natürliches Zurückweichen der Bedienperson zu erreichen. Für eine korrekte Anzeige der Informationen auf der Datenbrille müssen Position und Blickrichtung der Bedienperson erfasst werden, sei es durch den 3D-Sensor 20 und die Bewegungsmuster-Auswertungseinheit 41 oder unterstützt beziehungsweise ausschließlich durch zusätzliche Sensoren der Datenbrille.Instead of a
Durch die 3D-Sicherheitsvorrichtung 10 entsteht ein intuitives und einheitliches 3D-Interface, in dem Informationsdarstellung, Bedienungshandlungen, Visualisierung von Arbeitsschritten und die Maschinensicherheit zusammengefasst sind. Bisher eigenständige Elemente werden damit zu einer optimalen Gesamtlösung für eine effektive, sichere und ergonomische Mensch-Maschine-Interaktion integriert, welche zudem die Qualität sichert sowie Nebenzeiten und Nebentätigkeiten reduziert.The
Die
Claims (15)
Translated fromGermandadurch gekennzeichnet,
dass die Auswertungseinheit (41) dafür ausgebildet ist, aus den Bewegungsmustern Benutzereingaben an den 3D-Sensor oder an die Maschine abzuleiten.3D security device (10) for securing and operating at least one machine (16) at a cooperative workstation (12) with a 3D sensor (20) for acquiring three-dimensional image data of the workstation (12), the machine (16) and at least one operator (14) at the workstation (12) and with an evaluation unit (40, 41, 43), which is designed to determine movement pattern of the operator and issue a safety command to the machine (16) upon detection of a hazard to the operator,
characterized,
in that the evaluation unit (41) is designed to derive user inputs from the movement patterns to the 3D sensor or to the machine.
die eine Anzeigeeinrichtung (30, 42), insbesondere einen Projektor oder eine Datenbrille aufweist, um der Bedienperson (14) ein mit Zusatzinformationen überlagertes Bild des Arbeitsplatzes (12) zu präsentieren, wobei die Zusatzinformationen insbesondere die Darstellung eines Werkstücks (18), eine vorgesehene Position, Pose oder Bewegung der Bedienperson (14) und/oder ein Schutzfeld (50) umfassen.A 3D security device (10) according to claim 1,
a display device (30, 42), in particular a projector or a data glasses, to present the operator (14) with additional information superimposed image of the workstation (12), wherein the additional information in particular the representation of a workpiece (18), an envisaged Position, pose or movement of the operator (14) and / or a protective field (50) include.
wobei die Anzeigeeinrichtung (30, 42) dafür ausgebildet ist, Bedienelemente in den Arbeitsplatz (12) einzublenden, insbesondere virtuelle Schalter oder Regler.A 3D security device (10) according to claim 2,
wherein the display device (30, 42) is designed to display operating elements in the workstation (12), in particular virtual switches or controllers.
wobei die Auswertungseinheit (40) dafür ausgebildet ist, einen Unterschied zwischen einem Sollzustand und einem Istzustand zu erkennen und mittels der Anzeigeeinrichtung (30) anzuzeigen.A 3D security device (10) according to claim 2 or 3,
wherein the evaluation unit (40) is adapted to detect a difference between a desired state and an actual state and display by means of the display device (30).
wobei die Auswertungseinheit (40) dafür ausgebildet ist, einen Arbeitsschritt der Maschine (16) so lange zu verweigern, bis Sollzustand und Istzustand übereinstimmen.3D security device according to claim 4,
wherein the evaluation unit (40) is adapted to refuse a work step of the machine (16) until the desired state and actual state match.
wobei die Auswertungseinheit (40, 41) dafür ausgebildet ist, als Bewegungsmuster Gesten oder Körperhaltungen, insbesondere Handbewegungen zu erkennen.A 3D security device (10) according to any one of the preceding claims,
wherein the evaluation unit (40, 41) is adapted to recognize as movement patterns gestures or postures, in particular hand movements.
wobei die Auswertungseinheit (40, 41) dafür ausgebildet ist, Bewegungsmuster für das Heben oder Senken eines Maschinenteils (16) oder die Einstellung eines Abstands zwischen Bedienperson (14) und Maschinenteil (16) zu erkennen und das Maschinenteil (16) entsprechend zu bewegen.A 3D security device (10) according to any one of the preceding claims,
wherein the evaluation unit (40, 41) is adapted to detect movement patterns for lifting or lowering a machine part (16) or the setting of a distance between the operator (14) and machine part (16) and to move the machine part (16) accordingly.
wobei die Auswertungseinheit (40, 41) dafür ausgebildet ist, Bewegungsmuster zum Auslösen oder Beenden eines automatischen Arbeitsschritts zu erkennen und die Maschine (16) entsprechend zum Ausführen oder Anhalten des Arbeitsschritts anzusteuern, wobei ein Bewegungsmuster insbesondere eine Notausgeste oder eine Körperhaltung zur Bedienung einer virtuellen Zweihandschaltung ist.A 3D security device (10) according to any one of the preceding claims,
wherein the evaluation unit (40, 41) is adapted to recognize movement patterns for triggering or terminating an automatic operation and to control the machine (16) accordingly to execute or stop the operation, wherein a movement pattern in particular an emergency Ausgeste or a posture for operating a virtual Two-handed operation is.
wobei die Auswertungseinheit (40, 41) dafür ausgebildet ist, Bewegungsmuster zum Zurückdrängen eines Maschinenteils (16) zu erkennen und das Maschinenteil (16) entsprechend zu bewegen.A 3D security device (10) according to any one of the preceding claims,
wherein the evaluation unit (40, 41) is adapted to detect movement patterns for pushing back a machine part (16) and to move the machine part (16) accordingly.
wobei die Auswertungseinheit (40, 41) für einen Konfigurationsmodus ausgebildet ist, in dem Bewegungsmuster einer bestimmten Bedienperson (14) eingelernt und Bedienelementen oder Benutzereingaben zugeordnet werden.A 3D security device (10) according to any one of the preceding claims,
wherein the evaluation unit (40, 41) is designed for a configuration mode in which movement patterns of a specific operator (14) are taught in and associated with operating elements or user inputs.
wobei die Auswertungseinheit (40) für einen Kalibrierungsmodus ausgebildet ist, in dem der Arbeitsplatz (12) und die Maschine (16) an die Bedienperson (14) angepasst wird, insbesondere indem die Handhöhe oder die Kopfhöhe bestimmt und daraufhin eine ergonomische Höhenanpassung des Arbeitsplatzes (12) und/oder einer ergonomische Präsentation von Werkstücken (18) durch die Maschine (16) an die Bedienperson (14) erfolgt.A 3D security device (10) according to any one of the preceding claims,
wherein the evaluation unit (40) is designed for a calibration mode in which the workstation (12) and the machine (16) are adapted to the operator (14), in particular by determining the hand height or the head height and thereupon an ergonomic height adjustment of the workstation (12) and / or an ergonomic presentation of workpieces (18) by the machine (16) to the operator (14).
wobei die Auswertungseinheit (40, 43) dafür ausgebildet ist, eine Gefährdung der Bedienperson (14) anhand eines unzulässigen Eingriffs in einen Schutzbereich (50) innerhalb des Arbeitsplatzes (12) zu erkennen und insbesondere die Schutzbereiche (50) dynamisch an ein derzeit bearbeitetes Werkstück (18) anzupassen, und wobei die Anzeigeeinrichtung (30, 42) dafür ausgebildet ist, der Bedienperson (14) die Schutzfelder (50) darzustellen.A 3D security device (10) according to any one of the preceding claims,
wherein the evaluation unit (40, 43) is adapted to detect a threat to the operator (14) on the basis of an unauthorized intervention in a protection area (50) within the workstation (12) and in particular the protection areas (50) dynamically to a currently machined workpiece (18), and wherein the display means (30, 42) is adapted to present to the operator (14) the protective fields (50).
wobei die Auswertungseinheit (40, 42) dafür ausgebildet ist, Konturen von Objekten, die unzulässig in ein Schutzfeld (50) eingreifen, mittels der Anzeigeeinrichtung (30) optisch hervorzuheben.A 3D security device (10) according to claim 12,
wherein the evaluation unit (40, 42) is designed to visually emphasize contours of objects that inadmissibly engage in a protective field (50) by means of the display device (30).
wobei die Auswertungseinheit (40, 42) dafür ausgebildet ist, bei Ausgabe eines Abschaltbefehls die dreidimensionalen Bilddaten zu speichern.A 3D security device (10) according to any one of the preceding claims,
wherein the evaluation unit (40, 42) is adapted to store the three-dimensional image data upon issuance of a shutdown command.
dadurch gekennzeichnet,
dass aus den Bewegungsmustern Benutzereingaben an den 3D-Sensor (20) oder an die Maschine (16) abgeleitet werden.Method for securing and operating at least one machine (16) at a cooperative workstation (12), wherein with a 3D sensor (20) three-dimensional image data of the workstation (12), the machine (16) and at least one operator (14) on the Workstation (12) detected and movement patterns of the operator (14) are determined, wherein upon detection of a threat to the operator (14) a hedge command is issued to the machine (16),
characterized,
that user inputs to the 3D sensor (20) or to the machine (16) are derived from the movement patterns.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102010017857.8ADE102010017857B4 (en) | 2010-04-22 | 2010-04-22 | 3D security device and method for securing and operating at least one machine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2380709A2true EP2380709A2 (en) | 2011-10-26 |
| EP2380709A3 EP2380709A3 (en) | 2013-06-19 |
Family
ID=44186356
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP11156685.7AWithdrawnEP2380709A3 (en) | 2010-04-22 | 2011-03-02 | 3D safety device and method for securing and operating at least one machine |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2380709A3 (en) |
| DE (1) | DE102010017857B4 (en) |
Cited By (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130070056A1 (en)* | 2011-09-20 | 2013-03-21 | Nexus Environmental, LLC | Method and apparatus to monitor and control workflow |
| WO2014048765A1 (en)* | 2012-09-27 | 2014-04-03 | Krones Ag | Operator system for a machine |
| CN103957801A (en)* | 2012-11-25 | 2014-07-30 | 株式会社东芝 | Posture detection support system for X-ray diagnosis and X-ray diagnosis device |
| US20150199106A1 (en)* | 2014-01-14 | 2015-07-16 | Caterpillar Inc. | Augmented Reality Display System |
| EP2783815A3 (en)* | 2013-03-19 | 2015-10-07 | Kabushiki Kaisha Yaskawa Denki | Robot system and method for producing to-be-processed material |
| WO2015155295A1 (en)* | 2014-04-11 | 2015-10-15 | Kuka Systems Gmbh | Method for the partially automated production of workpieces on an mrk work station and associated mrk work station |
| WO2016010614A1 (en)* | 2014-07-16 | 2016-01-21 | Google Inc. | Virtual safety cages for robotic devices |
| EP3086193A1 (en)* | 2015-04-24 | 2016-10-26 | JPW Industries Inc. | Wearable display for use with tool |
| EP3103596A1 (en)* | 2015-06-09 | 2016-12-14 | Sick Ag | Method for loading load carriers and loading/unloading station |
| WO2017093197A1 (en)* | 2015-12-04 | 2017-06-08 | Kuka Roboter Gmbh | Displaying of variable safety zones |
| CN108349078A (en)* | 2015-10-21 | 2018-07-31 | 库卡罗伯特有限公司 | The protection zone of effector system adjusts |
| WO2018171849A1 (en)* | 2017-03-23 | 2018-09-27 | Mrr Ejby Holding Aps | Safety system for collaborative robot |
| CN109153124A (en)* | 2016-06-20 | 2019-01-04 | X开发有限责任公司 | Localization of Mobile Systems |
| WO2019052742A1 (en)* | 2017-09-12 | 2019-03-21 | Trumpf Werkzeugmaschinen Gmbh + Co. Kg | METHOD FOR MANUFACTURING MANUFACTURING PROCESSES IN THE METAL-PROCESSING INDUSTRY USING IMAGE RECORDING DEVICES |
| EP3467544A1 (en)* | 2017-10-06 | 2019-04-10 | Robert Bosch GmbH | Method for an assembly workstation, assembly workstation, device for carrying out said method, computer program and computer readable medium |
| EP3482887A1 (en)* | 2017-11-13 | 2019-05-15 | Rockwell Automation Technologies, Inc. | Augmented reality safety automation zone system and method |
| WO2019135513A1 (en) | 2018-01-08 | 2019-07-11 | Samsung Electronics Co., Ltd. | Electronic device and controlling method thereof |
| EP2953778B1 (en) | 2013-05-15 | 2019-07-17 | Arburg GmbH + Co KG | Method for operating a machine for processing plastics |
| US10388075B2 (en) | 2016-11-08 | 2019-08-20 | Rockwell Automation Technologies, Inc. | Virtual reality and augmented reality for industrial automation |
| US10401839B2 (en) | 2016-09-26 | 2019-09-03 | Rockwell Automation Technologies, Inc. | Workflow tracking and identification using an industrial monitoring system |
| US10528021B2 (en) | 2015-10-30 | 2020-01-07 | Rockwell Automation Technologies, Inc. | Automated creation of industrial dashboards and widgets |
| US10545492B2 (en) | 2016-09-26 | 2020-01-28 | Rockwell Automation Technologies, Inc. | Selective online and offline access to searchable industrial automation data |
| US10676022B2 (en) | 2017-12-27 | 2020-06-09 | X Development Llc | Visually indicating vehicle caution regions |
| US10735691B2 (en) | 2016-11-08 | 2020-08-04 | Rockwell Automation Technologies, Inc. | Virtual reality and augmented reality for industrial automation |
| DE102019113764A1 (en)* | 2019-05-23 | 2020-11-26 | Bayerische Motoren Werke Aktiengesellschaft | Method for the configuration of a workpiece-related workpiece holding device for press automation |
| CN112015134A (en)* | 2020-08-31 | 2020-12-01 | 安徽中烟工业有限责任公司 | Storage cabinet personal safety protection safety system and safety control method thereof |
| EP3745224A1 (en)* | 2019-05-27 | 2020-12-02 | Safran Nacelles | Collaboration of a robot and an operator in order to modify a part |
| US10866631B2 (en) | 2016-11-09 | 2020-12-15 | Rockwell Automation Technologies, Inc. | Methods, systems, apparatuses, and techniques for employing augmented reality and virtual reality |
| CN112817302A (en)* | 2019-11-18 | 2021-05-18 | 中冶赛迪工程技术股份有限公司 | Safety control method, system, equipment and readable medium for industrial robot |
| EP3838476A3 (en)* | 2019-12-20 | 2021-09-08 | BIESSE S.p.A. | System to monitor the operational safety of machine tools for industrial processing operations |
| CN113874817A (en)* | 2019-05-24 | 2021-12-31 | 豪迈钻孔装置有限公司 | Method and operating system for setting up processing device, processing device, and computer program for setting up processing device |
| WO2022028237A1 (en)* | 2020-08-07 | 2022-02-10 | 深圳市海柔创新科技有限公司 | Method, apparatus and system for controlling robot, control device, and robot |
| US11258987B2 (en) | 2018-09-21 | 2022-02-22 | Microsoft Technology Licensing, Llc | Anti-collision and motion control systems and methods |
| CN114527740A (en)* | 2020-11-06 | 2022-05-24 | 动态Ad有限责任公司 | Method and system for augmented reality |
| WO2023066460A1 (en)* | 2021-10-19 | 2023-04-27 | Abb Schweiz Ag | Method of handling safety of industrial robot, control system and robot system |
| US11815598B2 (en) | 2019-06-10 | 2023-11-14 | Microsoft Technology Licensing, Llc | Anti-collision and motion monitoring, control, and alerting systems and methods |
| US20230393233A1 (en)* | 2021-02-25 | 2023-12-07 | Trumpf Tracking Technologies Gmbh | Optics-based correction of the position of a mobile unit |
| EP4538580A1 (en)* | 2023-10-13 | 2025-04-16 | Leuze electronic GmbH + Co KG | Safety device and method for operating a safety device |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2469300B1 (en) | 2011-04-18 | 2012-08-22 | Sick Ag | 3D camera and method for three dimensional surveillance of a surveillance area |
| EP2772676B1 (en) | 2011-05-18 | 2015-07-08 | Sick Ag | 3D camera and method for three dimensional surveillance of a surveillance area |
| DE202011050899U1 (en) | 2011-08-04 | 2012-11-15 | Sick Ag | 3D camera with lighting unit and cooling element for it |
| DE102011052802B4 (en) | 2011-08-18 | 2014-03-13 | Sick Ag | 3D camera and method for monitoring a room area |
| DE102012102236A1 (en) | 2012-03-16 | 2013-09-19 | Pilz Gmbh & Co. Kg | Method and device for securing a hazardous working area of an automated machine |
| DE102012205549A1 (en)* | 2012-04-04 | 2013-10-10 | Siemens Aktiengesellschaft | Method for operating e.g. deadman switch in contactless controlled medical device e.g. C-arm x-ray device, involves detecting response signal by part of user, and operating switch depending on detected response signal |
| DE202012101965U1 (en) | 2012-05-30 | 2012-06-26 | Sick Ag | stereo camera |
| DE102012105401B3 (en)* | 2012-06-21 | 2013-04-25 | Sick Ag | Three-dimensional camera i.e. stereoscopic security camera, for monitoring e.g. press, has classification unit to form measuring curve of correlation quality based on depth maps produced at different exposure times |
| DE202012102298U1 (en) | 2012-06-21 | 2013-09-25 | Sick Ag | 3D camera |
| DE202012102541U1 (en) | 2012-07-10 | 2013-10-18 | Sick Ag | 3D camera |
| DE202012104074U1 (en) | 2012-10-23 | 2014-01-27 | Sick Ag | 3D camera for three-dimensional monitoring of a surveillance area |
| DE102013109649A1 (en)* | 2013-09-04 | 2015-03-05 | Index-Werke Gmbh & Co. Kg Hahn & Tessky | machine tool |
| DE102013110905A1 (en)* | 2013-10-01 | 2015-04-02 | Daimler Ag | MRK planning and monitoring technology |
| DE102014202733B4 (en) | 2014-02-14 | 2022-09-01 | Homag Plattenaufteiltechnik Gmbh | Method for operating a machine, in particular a panel dividing plant |
| DE102014204695A1 (en)* | 2014-03-13 | 2015-09-17 | Holzma Plattenaufteiltechnik Gmbh | Method for operating a plate processing plant |
| DE102014210612A1 (en) | 2014-06-04 | 2015-12-17 | Holzma Plattenaufteiltechnik Gmbh | Method of operating a plate processing plant, and plate processing plant |
| DE102014210594A1 (en)* | 2014-06-04 | 2015-12-17 | Robert Bosch Gmbh | Method and device for operating a production plant |
| DE102014210938A1 (en) | 2014-06-06 | 2015-12-17 | Siemens Aktiengesellschaft | Method for controlling a medical device and control system for a medical device |
| DE102014013677B4 (en) | 2014-09-10 | 2017-06-22 | Faro Technologies, Inc. | Method for optically scanning and measuring an environment with a handheld scanner and subdivided display |
| DE202014010357U1 (en)* | 2014-09-10 | 2015-12-11 | Faro Technologies, Inc. | Device for optically scanning and measuring an environment with a hand-held scanner and control by gestures |
| US9602811B2 (en) | 2014-09-10 | 2017-03-21 | Faro Technologies, Inc. | Method for optically measuring three-dimensional coordinates and controlling a three-dimensional measuring device |
| US9693040B2 (en) | 2014-09-10 | 2017-06-27 | Faro Technologies, Inc. | Method for optically measuring three-dimensional coordinates and calibration of a three-dimensional measuring device |
| DE102014013678B3 (en) | 2014-09-10 | 2015-12-03 | Faro Technologies, Inc. | Method for optically sensing and measuring an environment with a handheld scanner and gesture control |
| DE102015208273A1 (en) | 2015-05-05 | 2016-11-10 | Siemens Aktiengesellschaft | Method and device for displaying a process occurrence of at least one railway safety device and railway safety system with such a device |
| DE102015225587A1 (en)* | 2015-12-17 | 2017-06-22 | Volkswagen Aktiengesellschaft | Interaction system and method for interaction between a person and at least one robot unit |
| DE102016203674A1 (en) | 2016-03-07 | 2017-09-07 | Homag Gmbh | Method for operating a continuous machine and continuous machine |
| JP6360105B2 (en)* | 2016-06-13 | 2018-07-18 | ファナック株式会社 | Robot system |
| DE102016216441B3 (en) | 2016-08-31 | 2018-01-04 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Method and device for human-robot cooperation |
| DE102017107357A1 (en)* | 2016-10-21 | 2018-04-26 | Trumpf Werkzeugmaschinen Gmbh + Co. Kg | Absortierunterstützungsverfahren, Absortiersystem and flatbed machine tool |
| DE102016120132A1 (en) | 2016-10-21 | 2018-04-26 | Trumpf Werkzeugmaschinen Gmbh + Co. Kg | Workpiece collection unit and method for supporting the machining of workpieces |
| DE102017005194C5 (en) | 2017-05-31 | 2022-05-19 | Kuka Deutschland Gmbh | Controlling a robot assembly |
| DE102017007908A1 (en)* | 2017-08-21 | 2019-02-21 | Hochschule Bochum | Method for controlling the movement of a mobile robot |
| DE102018214439A1 (en) | 2017-11-17 | 2019-05-23 | Volkswagen Aktiengesellschaft | Method and device for securing a working area of a robot during a use phase |
| DE102018109329B4 (en)* | 2018-04-19 | 2019-12-05 | Gottfried Wilhelm Leibniz Universität Hannover | Multi-unit actuated kinematics, preferably robots, particularly preferably articulated robots |
| CN109227540A (en)* | 2018-09-28 | 2019-01-18 | 深圳蓝胖子机器人有限公司 | A kind of robot control method, robot and computer readable storage medium |
| DE102019115763A1 (en)* | 2019-06-11 | 2020-12-17 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Method for operating a human machine interface |
| DE102019211770B3 (en)* | 2019-08-06 | 2020-09-03 | BIBA - Bremer Institut für Produktion und Logistik GmbH | Process for the computer-aided recording and evaluation of a workflow in which a human worker and a robotic system interact |
| DE102020115104A1 (en) | 2020-06-08 | 2021-12-09 | Kuka Deutschland Gmbh | Safety control system and method for performing a safety function |
| DE202020106491U1 (en) | 2020-11-12 | 2022-02-16 | Sick Ag | Visualization of a protective field |
| DE102020129823B4 (en) | 2020-11-12 | 2022-07-07 | Sick Ag | Visualization of a protective field |
| DE102023102457A1 (en)* | 2023-02-01 | 2024-08-01 | Bayerische Motoren Werke Aktiengesellschaft | Driverless transport system |
| DE202024102209U1 (en)* | 2024-04-30 | 2025-08-04 | Altendorf Gmbh | Safety device for an industrial robot |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6297844B1 (en) | 1999-11-24 | 2001-10-02 | Cognex Corporation | Video safety curtain |
| DE102004043514A1 (en) | 2004-09-08 | 2006-03-09 | Sick Ag | Method and device for controlling a safety-related function of a machine |
| DE102006048166A1 (en) | 2006-08-02 | 2008-02-07 | Daimler Ag | Method for observing a person in an industrial environment |
| EP2048557A1 (en) | 2007-10-11 | 2009-04-15 | Sick Ag | Optoelectronic sensor and mobile device and configuration method |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE9800884L (en)* | 1998-03-16 | 1999-05-25 | Tony Paul Lindeberg | Method and apparatus for transmitting information through motion detection, and using the apparatus |
| DE10216023B4 (en) | 2002-04-11 | 2013-08-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Method and apparatus for controlled interaction between a self-propelled robot unit and a human |
| DE10305384A1 (en)* | 2003-02-11 | 2004-08-26 | Kuka Roboter Gmbh | Method and device for visualizing computer-aided information |
| WO2009155947A1 (en) | 2008-06-26 | 2009-12-30 | Abb Ag | Control system and method for control |
| DE102009026091A1 (en) | 2008-07-02 | 2010-04-01 | Elan Schaltelemente Gmbh & Co. Kg | Method for monitoring three-dimensional spatial area, particularly work cell of automatic working machine, for e.g. robot, involves accomplishing independent scene analysis of images in or for each camera |
- 2010
- 2010-04-22DEDE102010017857.8Apatent/DE102010017857B4/ennot_activeExpired - Fee Related
- 2011
- 2011-03-02EPEP11156685.7Apatent/EP2380709A3/ennot_activeWithdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6297844B1 (en) | 1999-11-24 | 2001-10-02 | Cognex Corporation | Video safety curtain |
| DE102004043514A1 (en) | 2004-09-08 | 2006-03-09 | Sick Ag | Method and device for controlling a safety-related function of a machine |
| DE102006048166A1 (en) | 2006-08-02 | 2008-02-07 | Daimler Ag | Method for observing a person in an industrial environment |
| EP2048557A1 (en) | 2007-10-11 | 2009-04-15 | Sick Ag | Optoelectronic sensor and mobile device and configuration method |
Cited By (70)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130070056A1 (en)* | 2011-09-20 | 2013-03-21 | Nexus Environmental, LLC | Method and apparatus to monitor and control workflow |
| WO2014048765A1 (en)* | 2012-09-27 | 2014-04-03 | Krones Ag | Operator system for a machine |
| CN104704433A (en)* | 2012-09-27 | 2015-06-10 | 克朗斯股份公司 | Operator system for a machine |
| US9478115B2 (en) | 2012-09-27 | 2016-10-25 | Krones Ag | Operator system for a machine |
| CN103957801A (en)* | 2012-11-25 | 2014-07-30 | 株式会社东芝 | Posture detection support system for X-ray diagnosis and X-ray diagnosis device |
| EP2783815A3 (en)* | 2013-03-19 | 2015-10-07 | Kabushiki Kaisha Yaskawa Denki | Robot system and method for producing to-be-processed material |
| EP2953778B2 (en)† | 2013-05-15 | 2024-01-17 | Arburg GmbH + Co KG | Method for operating a machine for processing plastics |
| US11267179B2 (en) | 2013-05-15 | 2022-03-08 | Arburg Gmbh + Co. Kg | Method for operating a machine for processing plastics, utilizing embedded expert knowledge and 3D geometry data |
| EP2953778B1 (en) | 2013-05-15 | 2019-07-17 | Arburg GmbH + Co KG | Method for operating a machine for processing plastics |
| US20150199106A1 (en)* | 2014-01-14 | 2015-07-16 | Caterpillar Inc. | Augmented Reality Display System |
| WO2015155295A1 (en)* | 2014-04-11 | 2015-10-15 | Kuka Systems Gmbh | Method for the partially automated production of workpieces on an mrk work station and associated mrk work station |
| US9283678B2 (en) | 2014-07-16 | 2016-03-15 | Google Inc. | Virtual safety cages for robotic devices |
| US9522471B2 (en) | 2014-07-16 | 2016-12-20 | Google Inc. | Virtual safety cages for robotic devices |
| CN106660208A (en)* | 2014-07-16 | 2017-05-10 | X开发有限责任公司 | Virtual safety cover for robotic device |
| WO2016010614A1 (en)* | 2014-07-16 | 2016-01-21 | Google Inc. | Virtual safety cages for robotic devices |
| US9821463B2 (en) | 2014-07-16 | 2017-11-21 | X Development Llc | Virtual safety cages for robotic devices |
| US9972133B2 (en) | 2015-04-24 | 2018-05-15 | Jpw Industries Inc. | Wearable display for use with tool |
| US10685494B2 (en) | 2015-04-24 | 2020-06-16 | Jpw Industries Inc. | Wearable display for use with tool |
| EP3086193A1 (en)* | 2015-04-24 | 2016-10-26 | JPW Industries Inc. | Wearable display for use with tool |
| EP3103596A1 (en)* | 2015-06-09 | 2016-12-14 | Sick Ag | Method for loading load carriers and loading/unloading station |
| CN108349078B (en)* | 2015-10-21 | 2021-06-18 | 库卡罗伯特有限公司 | Protected zone adjustment for manipulator system |
| US10864637B2 (en) | 2015-10-21 | 2020-12-15 | Kuka Roboter Gmbh | Protective-field adjustment of a manipulator system |
| CN108349078A (en)* | 2015-10-21 | 2018-07-31 | 库卡罗伯特有限公司 | The protection zone of effector system adjusts |
| US10528021B2 (en) | 2015-10-30 | 2020-01-07 | Rockwell Automation Technologies, Inc. | Automated creation of industrial dashboards and widgets |
| CN108290292B (en)* | 2015-12-04 | 2021-09-03 | 库卡罗伯特有限公司 | Display of variable protection zones |
| EP3383595B1 (en) | 2015-12-04 | 2021-09-01 | KUKA Deutschland GmbH | Displaying of variable safety zones |
| CN108290292A (en)* | 2015-12-04 | 2018-07-17 | 库卡罗伯特有限公司 | Display of variable protection zones |
| WO2017093197A1 (en)* | 2015-12-04 | 2017-06-08 | Kuka Roboter Gmbh | Displaying of variable safety zones |
| CN109153124B (en)* | 2016-06-20 | 2021-10-01 | X开发有限责任公司 | Localization of mobile systems |
| CN109153124A (en)* | 2016-06-20 | 2019-01-04 | X开发有限责任公司 | Localization of Mobile Systems |
| US10401839B2 (en) | 2016-09-26 | 2019-09-03 | Rockwell Automation Technologies, Inc. | Workflow tracking and identification using an industrial monitoring system |
| US10545492B2 (en) | 2016-09-26 | 2020-01-28 | Rockwell Automation Technologies, Inc. | Selective online and offline access to searchable industrial automation data |
| US10735691B2 (en) | 2016-11-08 | 2020-08-04 | Rockwell Automation Technologies, Inc. | Virtual reality and augmented reality for industrial automation |
| US10535202B2 (en) | 2016-11-08 | 2020-01-14 | Rockwell Automation Technologies, Inc. | Virtual reality and augmented reality for industrial automation |
| US10388075B2 (en) | 2016-11-08 | 2019-08-20 | Rockwell Automation Technologies, Inc. | Virtual reality and augmented reality for industrial automation |
| US11265513B2 (en) | 2016-11-08 | 2022-03-01 | Rockwell Automation Technologies, Inc. | Virtual reality and augmented reality for industrial automation |
| US11159771B2 (en) | 2016-11-08 | 2021-10-26 | Rockwell Automation Technologies, Inc. | Virtual reality and augmented reality for industrial automation |
| US10866631B2 (en) | 2016-11-09 | 2020-12-15 | Rockwell Automation Technologies, Inc. | Methods, systems, apparatuses, and techniques for employing augmented reality and virtual reality |
| US11669156B2 (en) | 2016-11-09 | 2023-06-06 | Rockwell Automation Technologies, Inc. | Methods, systems, apparatuses, and techniques for employing augmented reality and virtual reality |
| US11347304B2 (en) | 2016-11-09 | 2022-05-31 | Rockwell Automation Technologies, Inc. | Methods, systems, apparatuses, and techniques for employing augmented reality and virtual reality |
| WO2018171849A1 (en)* | 2017-03-23 | 2018-09-27 | Mrr Ejby Holding Aps | Safety system for collaborative robot |
| US11460832B2 (en) | 2017-09-12 | 2022-10-04 | Trumpf Werkzeugmaschinen Gmbh + Co. Kg | Object tracking-based control of manufacturing processes in the metalworking industry |
| WO2019052742A1 (en)* | 2017-09-12 | 2019-03-21 | Trumpf Werkzeugmaschinen Gmbh + Co. Kg | METHOD FOR MANUFACTURING MANUFACTURING PROCESSES IN THE METAL-PROCESSING INDUSTRY USING IMAGE RECORDING DEVICES |
| EP3467544A1 (en)* | 2017-10-06 | 2019-04-10 | Robert Bosch GmbH | Method for an assembly workstation, assembly workstation, device for carrying out said method, computer program and computer readable medium |
| EP3482887A1 (en)* | 2017-11-13 | 2019-05-15 | Rockwell Automation Technologies, Inc. | Augmented reality safety automation zone system and method |
| US10875448B2 (en) | 2017-12-27 | 2020-12-29 | X Development Llc | Visually indicating vehicle caution regions |
| US10676022B2 (en) | 2017-12-27 | 2020-06-09 | X Development Llc | Visually indicating vehicle caution regions |
| CN111566582A (en)* | 2018-01-08 | 2020-08-21 | 三星电子株式会社 | Electronic device and control method thereof |
| CN111566582B (en)* | 2018-01-08 | 2025-01-17 | 三星电子株式会社 | Electronic apparatus and control method thereof |
| US10885335B2 (en) | 2018-01-08 | 2021-01-05 | Samsung Electronics Co., Ltd. | Electronic device and controlling method thereof |
| WO2019135513A1 (en) | 2018-01-08 | 2019-07-11 | Samsung Electronics Co., Ltd. | Electronic device and controlling method thereof |
| EP3662341A4 (en)* | 2018-01-08 | 2020-08-26 | Samsung Electronics Co., Ltd. | ELECTRONIC DEVICE AND CONTROL PROCEDURE FOR IT |
| US11258987B2 (en) | 2018-09-21 | 2022-02-22 | Microsoft Technology Licensing, Llc | Anti-collision and motion control systems and methods |
| DE102019113764A1 (en)* | 2019-05-23 | 2020-11-26 | Bayerische Motoren Werke Aktiengesellschaft | Method for the configuration of a workpiece-related workpiece holding device for press automation |
| DE102019113764B4 (en)* | 2019-05-23 | 2025-05-15 | Bayerische Motoren Werke Aktiengesellschaft | Method for configuring a workpiece-related workpiece holding device for press automation |
| US11964318B2 (en) | 2019-05-23 | 2024-04-23 | Bayerische Motoren Werke Aktiengesellschaft | Method for configuring a workpiece-related workpiece holding device for press automation |
| CN113874817A (en)* | 2019-05-24 | 2021-12-31 | 豪迈钻孔装置有限公司 | Method and operating system for setting up processing device, processing device, and computer program for setting up processing device |
| EP3745224A1 (en)* | 2019-05-27 | 2020-12-02 | Safran Nacelles | Collaboration of a robot and an operator in order to modify a part |
| FR3096599A1 (en)* | 2019-05-27 | 2020-12-04 | Safran Nacelles | Collaboration of a robot and an operator to modify a part |
| US11815598B2 (en) | 2019-06-10 | 2023-11-14 | Microsoft Technology Licensing, Llc | Anti-collision and motion monitoring, control, and alerting systems and methods |
| CN112817302A (en)* | 2019-11-18 | 2021-05-18 | 中冶赛迪工程技术股份有限公司 | Safety control method, system, equipment and readable medium for industrial robot |
| CN112817302B (en)* | 2019-11-18 | 2023-04-07 | 中冶赛迪工程技术股份有限公司 | Safety control method, system, equipment and readable medium for industrial robot |
| EP3838476A3 (en)* | 2019-12-20 | 2021-09-08 | BIESSE S.p.A. | System to monitor the operational safety of machine tools for industrial processing operations |
| WO2022028237A1 (en)* | 2020-08-07 | 2022-02-10 | 深圳市海柔创新科技有限公司 | Method, apparatus and system for controlling robot, control device, and robot |
| CN112015134B (en)* | 2020-08-31 | 2023-11-03 | 安徽中烟工业有限责任公司 | A storage cabinet personal safety protection safety system and its safety control method |
| CN112015134A (en)* | 2020-08-31 | 2020-12-01 | 安徽中烟工业有限责任公司 | Storage cabinet personal safety protection safety system and safety control method thereof |
| CN114527740A (en)* | 2020-11-06 | 2022-05-24 | 动态Ad有限责任公司 | Method and system for augmented reality |
| US20230393233A1 (en)* | 2021-02-25 | 2023-12-07 | Trumpf Tracking Technologies Gmbh | Optics-based correction of the position of a mobile unit |
| WO2023066460A1 (en)* | 2021-10-19 | 2023-04-27 | Abb Schweiz Ag | Method of handling safety of industrial robot, control system and robot system |
| EP4538580A1 (en)* | 2023-10-13 | 2025-04-16 | Leuze electronic GmbH + Co KG | Safety device and method for operating a safety device |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102010017857A1 (en) | 2011-10-27 |
| EP2380709A3 (en) | 2013-06-19 |
| DE102010017857B4 (en) | 2019-08-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102010017857B4 (en) | 3D security device and method for securing and operating at least one machine | |
| EP2048557B1 (en) | Optoelectronic sensor and mobile device and configuration method | |
| EP3578319B1 (en) | Method for securing a hazardous area | |
| DE102018109463C5 (en) | Method for using a multi-unit actuated kinematics, preferably a robot, particularly preferably an articulated robot, by a user using a mobile display device | |
| EP3709106B1 (en) | Securing of a machine | |
| EP3578320B1 (en) | Configuring a hazardous area monitored by a 3d sensor | |
| EP3611422B1 (en) | Sensor assembly and method for securing a supervised area | |
| EP2989369B1 (en) | Apparatus and method for safeguarding an automatically operating machine | |
| EP2053538B1 (en) | Securing a surveillance area and visual support for automatic processing | |
| AT513130B1 (en) | Method and system for assisting a worker in a facility for manipulating goods | |
| EP2023160B1 (en) | 3D room surveillance with configuration mode for determining the protection fields | |
| EP3744482B1 (en) | Securing of a movable part of a machine | |
| DE112017002639T5 (en) | Robot control device | |
| EP3546136B1 (en) | Augmented reality system | |
| DE102020127670B4 (en) | Securing a moving machine part | |
| DE202019102935U1 (en) | Safety device for machine tools | |
| WO2015049207A2 (en) | Human-robot collaboration planning technology | |
| WO2015049202A2 (en) | Human-robot collaboration planning and monitoring technology | |
| EP3572971B1 (en) | Securing a surveillance area with at least one machine | |
| EP3865257A1 (en) | Device and method for monitoring and controlling a technical working system | |
| DE102016222245A1 (en) | Device and method for acting on objects | |
| EP3234442B1 (en) | Method for monitoring a coordinate measuring device | |
| DE102023118908A1 (en) | COLLABORATIVE SECURITY MONITORING FOR ROBOTIC APPLICATIONS ENABLED BY AUGMENTED REALITY AND OTHER LOCATION-AWARENESS TECHNOLOGIES | |
| DE202020106491U1 (en) | Visualization of a protective field | |
| EP3893145B1 (en) | Protection of hazardous location |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AK | Designated contracting states | Kind code of ref document:A2 Designated state(s):AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR | |
| AX | Request for extension of the european patent | Extension state:BA ME | |
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase | Free format text:ORIGINAL CODE: 0009012 | |
| PUAL | Search report despatched | Free format text:ORIGINAL CODE: 0009013 | |
| AK | Designated contracting states | Kind code of ref document:A3 Designated state(s):AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR | |
| AX | Request for extension of the european patent | Extension state:BA ME | |
| RIC1 | Information provided on ipc code assigned before grant | Ipc:B25J 9/16 20060101AFI20130516BHEP Ipc:G05B 19/4061 20060101ALI20130516BHEP | |
| STAA | Information on the status of an ep patent application or granted ep patent | Free format text:STATUS: THE APPLICATION HAS BEEN WITHDRAWN | |
| 18W | Application withdrawn | Effective date:20130911 |