EP2300930B1 - Tele-presence robot system with multi-cast features - Google Patents
Tele-presence robot system with multi-cast featuresDownload PDFInfo
- Publication number
- EP2300930B1 EP2300930B1EP09795215.4AEP09795215AEP2300930B1EP 2300930 B1EP2300930 B1EP 2300930B1EP 09795215 AEP09795215 AEP 09795215AEP 2300930 B1EP2300930 B1EP 2300930B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- robot
- remote control
- control station
- observer
- station
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0481—Interaction techniques based on graphical user interfaces [GUI] based on specific properties of the displayed interaction object or a metaphor-based environment, e.g. interaction with desktop elements like windows or icons, or assisted by a cursor's changing behaviour or appearance
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/67—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for remote operation
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0005—Manipulators having means for high-level communication with users, e.g. speech generator, face recognition means
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/009—Nursing, e.g. carrying sick persons, pushing wheelchairs, distributing drugs
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1689—Teleoperation
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0038—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with simple or augmented images from one or more cameras located onboard the vehicle, e.g. tele-operation
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F15/00—Digital computers in general; Data processing equipment in general
- G06F15/16—Combinations of two or more digital computers each having at least an arithmetic unit, a program unit and a register, e.g. for a simultaneous processing of several programs
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/63—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for local operation
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16Z—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS, NOT OTHERWISE PROVIDED FOR
- G16Z99/00—Subject matter not provided for in other main groups of this subclass
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40136—Stereo audio and vision
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40146—Telepresence, teletaction, sensor feedback from slave to operator
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40169—Display of actual situation at the remote site
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40174—Robot teleoperation through internet
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45117—Medical, radio surgery manipulator
Definitions
- the subject matter disclosedgenerally relates to the field of robotics.
- Robotshave been used in a variety of applications ranging from remote control of hazardous material to assisting in the performance of surgery.
- U.S. Patent No. 5,762,458 issued to Wang et al.discloses a system that allows a surgeon to perform minimally invasive medical procedures through the use of robotically controlled instruments.
- One of the robotic arms in the Wang systemmoves an endoscope that has a camera. The camera allows a surgeon to view a surgical area of a patient.
- the InTouch robotis controlled by a user at a remote station.
- the remote stationmay be a personal computer with a joystick that allows the user to remotely control the movement of the robot.
- Both the robot and remote stationhave cameras, monitors, speakers and microphones to allow for two-way video/audio communication.
- the robot cameraprovides video images to a screen at the remote station so that the user can view the robot's surroundings and move the robot accordingly.
- U.S. Pat. 7,158,860 issued to Wang et al. and assigned to the owner of the present application, InTouch Technologies, Inc.discloses a tele-presence robot system that includes a primary remote control station and one or more secondary control stations that are all linked to a tele-presence robot.
- the systemallows the secondary stations to observe the video/audio feed provided by the robot. This allows the users of the secondary station to be trained through the robot and primary station. It would be desirable to modify such a system to implement more features such as the ability for two-way communication between stations, or the transfer of robot control to one of the secondary stations.
- a remote controlled robot systemthat comprises a first remote control station receiving video from a robot, said first remote control station located at a first location and a second remote control station receiving video from said robot, said second remote control station located at a second location different from said first location, wherein the first remote control station is a master remote control station having exclusive control of the robot and the second remote control station is an observer remote control station.
- the said first remote stationdisplays a display user interface including a robot view field that displays said video provided by said robot, an observer view field that displays observer information about an observer at the observer remote control station, and a manually selectable feature that allows the master remote control station to transfer control of said robot to the observer remote station.
- a graphical user interface for a remote controlled robot systemthat includes a robot view field that displays information provided by a robot and an observer view field that displays observer information about one or more observers that can receive the robot information.
- the interfacehas various features that allow a master user to control the observation and participation of observers..
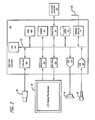
- FIG. 1shows an embodiment of robot system 10.
- the robot system 10includes a robot 12, a base station 14 and a plurality of remote control stations 16.
- Each remote control station 16may be coupled to the base station 14 through a network 18.
- the network 18may be either a packet switched network such as the Internet, or a circuit switched network such has a Public Switched Telephone Network (PSTN) or other broadband system.
- PSTNPublic Switched Telephone Network
- the base station 14may be coupled to the network 18 by a modem 20 or other broadband network interface device.
- Each remote control station 16may include a computer 22 that has a monitor 24, a camera 26, a microphone 28 and a speaker 30.
- the computer 22may also contain an input device 32 such as a joystick or a mouse.
- Each control station 16is typically located in a place that is remote from the robot 12. Although only one robot 12 is shown, it is to be understood that the system 10 may have a plurality of robots 12. In general any number of robots 12 may be controlled by any number of remote stations. For example, one remote station 16 may be coupled to a plurality of robots 12, or one robot 12 may be coupled to a plurality of remote stations 16.
- the robot 12includes a movement platform 34 that is attached to a robot housing 36. Also attached to the robot housing 36 are a camera 38, a monitor 40, a microphone(s) 42 and a speaker 44. The microphone 42 and speaker 30 may create a stereophonic sound.
- the robot 12may also have an antenna 46 that is wirelessly coupled to an antenna 48 of the base station 14.
- the system 10allows a user at the remote control station 16 to move the robot 12 through the input device 32.
- the robot camera 38is coupled to the remote monitor 24 so that a user at the remote station 16 can view a patient.
- the robot monitor 40is coupled to the remote camera 26 so that the patient can view the user.
- the microphones 28 and 42, and speakers 30 and 44allow for audible communication between the patient and the user.
- Each remote station computer 22may operate Microsoft OS software and WINDOWS XP or other operating systems such as LINUX.
- the remote computer 22may also operate a video driver, a camera driver, an audio driver and a joystick driver.
- the video imagesmay be transmitted and received with compression software such as MPEG CODEC.
- FIGS 2 and 3show an embodiment of the robot 12.
- the robot 12may include a high level control system 50 and a low level control system 52.
- the high level control system 50may include a processor 54 that is connected to a bus 56.
- the busis coupled to the camera 38 by an input/output (I/O) port 58, and to the monitor 40 by a serial output port 60 and a VGA driver 62.
- the monitor 40may include a touchscreen function that allows the patient to enter input by touching the monitor screen.
- the speaker 44is coupled to the bus 56 by a digital to analog converter 64.
- the microphone 42is coupled to the bus 56 by an analog to digital converter 66.
- the high level controller 50may also contain random access memory (RAM) device 68, a non-volatile RAM device 70 and a mass storage device 72 that are all coupled to the bus 62.
- the mass storage device 72may contain medical files of the patient that can be accessed by the user at the remote control station 16.
- the mass storage device 72may contain a picture of the patient.
- the userparticularly a health care provider, can recall the old picture and make a side by side comparison on the monitor 24 with a present video image of the patient provided by the camera 38.
- the robot antennae 46may be coupled to a wireless transceiver 74.
- the transceiver 74may transmit and receive information in accordance with IEEE 802.11b.
- the controller 54may operate with a LINUX OS operating system.
- the controller 54may also operate MS WINDOWS along with video, camera and audio drivers for communication with the remote control station 16.
- Video informationmay be transceived using MPEG CODEC compression techniques.
- the softwaremay allow the user to send e-mail to someone at the robot site and vice versa, or allow someone at the robot site to access the Internet.
- the high level controller 50operates to control the communication between the robot 12 and the remote control station 16.
- the high level controller 50may be linked to the low level controller 52 by serial port 76.
- the low level controller 52runs software routines that mechanically actuate the robot 12. For example, the low level controller 52 provides instructions to actuate the movement platform to move the robot 12.
- the low level controller 52may receive movement instructions from the high level controller 50. The movement instructions may be received as movement commands from the remote control station. Although two controllers are shown, it is to be understood that the robot 12 may have one controller controlling the high and low level functions.
- FIG. 3shows an embodiment of the robot 12.
- the robot 12may include a holonomic platform 110 that is attached to a robot housing 112.
- the holonomic platform 110provides three degrees of freedom to allow the robot 12 to move in any direction.
- the robot 12may have a head 114 that supports the camera 38 and the monitor 40.
- the head 114may have two degrees of freedom so that the camera 26 and monitor 24 can swivel and pivot as indicated by the arrows.
- the systemmay be the same or similar to a robot system provided by the assignee InTouch-Health, Inc. of Santa Barbara, California under the trademark RP-7.
- the systemmay also be the same or similar to the system disclosed in U.S. Patent No. 6,925,357 issued August 2, 2005 .
- the robot 12may be placed in a home, public or commercial property, or a facility where one or more patients are to be monitored and/or assisted.
- the facilitymay be a hospital or a residential care facility.
- the robot 12may be placed in a home where a health care provider may monitor and/or assist the patient.
- a friend or family membermay communicate with the patient.
- the cameras and monitors at both the robot and remote control stationsallow for teleconferencing between the patient and the person at the remote station(s).
- the robot 12can be maneuvered through the home, property or facility by manipulating the input device 32 at a remote station 16.
- the robot 10may be controlled by a number of different users. To accommodate for this the robot may have an arbitration system.
- the arbitration systemmay be integrated into the operating system of the robot 12.
- the arbitration techniquemay be embedded into the operating system of the high-level controller 50.
- the usersmay be divided into classes that include the robot itself, a local user, a caregiver, a doctor, a family member, or a service provider.
- the robot 12may override input commands that conflict with robot operation. For example, if the robot runs into a wall, the system may ignore all additional commands to continue in the direction of the wall.
- a local useris a person who is physically present with the robot.
- the robotcould have an input device that allows local operation.
- the robotmay incorporate a voice recognition system that receives and interprets audible commands.
- a caregiveris someone who remotely monitors the patient.
- a doctoris a medical professional who can remotely control the robot and also access medical files contained in the robot memory.
- the family and service usersremotely access the robot.
- the service usermay service the system such as by upgrading software, or setting operational parameters.
- Message packetsmay be transmitted between a robot 12 and a remote station 16.
- the packetsprovide commands and feedback.
- Each packetmay have multiple fields.
- a packetmay include an ID field a forward speed field, an angular speed field, a stop field, a bumper field, a sensor range field, a configuration field, a text field and a debug field.
- the identification of remote userscan be set in an ID field of the information that is transmitted from the remote control station 16 to the robot 12. For example, a user may enter a user ID into a setup table in the application software run by the remote control station 16. The user ID is then sent with each message transmitted to the robot.
- the robot 12may operate in one of two different modes; an exclusive mode, or a sharing mode.
- an exclusive modeonly one user has access control of the robot.
- the exclusive modemay have a priority assigned to each type of user. By way of example, the priority may be in order of local, doctor, caregiver, family and then service user.
- the sharing modetwo or more users may share access with the robot. For example, a caregiver may have access to the robot, the caregiver may then enter the sharing mode to allow a doctor to also access the robot. Both the caregiver and the doctor can conduct a simultaneous tele-conference with the patient.
- the arbitration schememay have one of four mechanisms; notification, timeouts, queue and call back.
- the notification mechanismmay inform either a present user or a requesting user that another user has, or wants, access to the robot.
- the timeout mechanismgives certain types of users a prescribed amount of time to finish access to the robot.
- the queue mechanismis an orderly waiting list for access to the robot.
- the call back mechanisminforms a user that the robot can be accessed.
- a family usermay receive an e-mail message that the robot is free for usage.
- Tables 1 and 2show how the mechanisms resolve access request from the various users. Table I User Access Control Medical Record Command Override Software/Debug Access Set Priority Robot No No Yes (1) No No Local No No Yes (2) No No Caregiver Yes Yes Yes (3) No No Doctor No Yes No No No No No Family No No No No No No No Service Yes No Yes Yes Yes Yes Yes Yes Yes Yes Yes Yes Yes Yes
- the information transmitted between the station 16 and the robot 12may be encrypted. Additionally, the user may have to enter a password to enter the system 10. A selected robot is then given an electronic key by the station 16. The robot 12 validates the key and returns another key to the station 16. The keys are used to encrypt information transmitted in the session.
- Figure 4shows a system with a plurality of remote stations 16A, 16B and 16C that can access a robot 12 through the network 18.
- the systemcan be set into a session mode wherein a master remote station 16A controls movement of the robot and receives both video and audio information from the robot camera and speaker, respectively.
- the observer stations 16B and 16Cmay also receive audio and visual information transmitted between the robot 12 and the station 16A. This mode allows multiple users at stations 16B and 16C to observe use of the robot while a teacher or master at station 16A moves the robot.
- the master remote station 16Acan retransmit the audio/visual information received from the robot 12 to the observer stations 16B and 16C. This can be done by changing the ID(s) in the ID field of the data packets received from the robot and then retransmitting the packets to the observer stations.
- the master remote station 16Acan instruct the robot to transmit the audio and visual information to the master 16A, and the observer 16B and 16C remote stations.
- each remote station 16A, 16B and 16Chas a unique network identifier such as an IP address that allows the robot to direct information to each station.
- the packetsmay contain a BROADCAST field that contains the station IDs for the remote stations that are to receive packets from the robot.
- the BROADCAST fieldmay be filled by the master station 16A.
- the session modeallows for training through the robot.
- the master remote station 16Amay be operated by a physician who moves the robot into visual and audio contact with a patient.
- the observer remote stations 16B an 16Cmay be manned by personnel such as interns that observe and receive instructional training on providing care giving to the patient.
- instruction of medical personnelis described, the system can be used to train any group of users that are remotely located from a training area.
- the systemmay be used to train personnel at a department store or allow potential buyers of real estate property to remotely view the property.
- Figure 5shows a display user interface ("DUI") 200 displayed at the master control station 16A.
- the DUI 200may include a robot view field 202 that displays a video image captured by the camera of the robot.
- the DUI 200may also include a station view field 204 that displays a video image provided by the camera of the master remote station 16A.
- the DUI 200may be part of an application program stored and operated by the computer 22 of the remote station 16A.
- the DUI 200may include a "Connect" button 206 that can be selected to connect the station to a robot. Selection of the Connect button 206 may cause the display of pull-down screens, etc. that allow the user to select a desired robot. System settings and options can be selected through buttons 208 and 210, respectively.
- Figure 6shows a menu 212 with an "Enable Multicasting" box 214 that can be “checked” to allow for other remote station to join a multi-cast session.
- a user at an observer stationmay attempt a connection with the same robot. If a robot is already in use the screen may display a message box 216 as shown in Figure 7A .
- the message box 216includes an "OK" button 218 that allows the user to request joining the session as an observer. If the user presently connected to the robot has not enabled the multicasting feature then a message 220 may be displayed indicating this fact as shown in Figure 7B . If the user selected the OK button 218 then the master user may receive the message 222 shown in Figure 7C .
- the messageincludes an "Accept" button 224 and a "Deny” button 226 that allows the master user to accept or deny the request to observe the session, respectively. When an observer is accepted the observers may receive the audio/video feeds from by the robot.
- the field 228can provide video images of the users captured by the cameras of the observer remote control stations. Each video image may also include a caption of the observer's name.
- the fieldincludes a scroll down tab 230 that allows the master user to scroll down the video images of the observers.
- the master usercan right click on any observer video image to display the pull down menu 232 shown in Figure 8 .
- the pull down menu 228allows the master user to select various options for the selected observer.
- the pull down menu 232includes an "Allow The Robot To Hear This User" feature 234 that can be selected so that the observer can provide audio to the robot.
- the systemmay allow for simultaneous three way audio between the robot, master user and one observer.
- Both the master and the observer stationsinclude a "Push To Talk" icon 236. If there is more than one observer then the "Push To Talk" icon 236 is enabled and the observer must continuously select the icon 232 to talk, much like a walkie-talkie button.
- the space barmay also be pushed after the icon 236 is selected to allow audio communication to the robot.
- an icon 238can be displayed in the observers video image to indicate which observer is providing audio input to the robot.
- the master and observer stationsmay also have a "Local Talk" icon 240. Selecting the Local Talk icon allows for textual communication between just the remote stations, popping up a text chat dialog box within each interface, which allows the master and observers to exchange text messages.
- a popup dialog box(not shown) may be displayed to the user who initiated Local Talk, which would list all current session participants, and allow the user to select only those participants to be part of the Local Talk.
- An "Allow Robot To See This User” feature 242can be selected so that the observer's video image is provided to the monitor of the robot instead of the master user's video image.
- the observer's video imagemay be displayed in the station view field 204 when that observer's image is provided to the robot.
- the "Allow This User To See Robot Video” 244 and “Allow This User To Hear Robot Audio” features 246can be selected so that the observer receives the video and audio feeds from the robot, respectively.
- the "Head Control” feature 248allows the selected observer to control the robot head to move the robot camera.
- the “Driving” feature 250allows the observer to drive the robot.
- robot datasuch as position sensor data, battery power, etc. are provided to the selected observer's remote station.
- the "Camera & Aux Video Control” feature 252allows the observer to control robot camera functions such as zoom, brightness, etc. The master no longer has the head, driving and camera controls when these features are transferred to an observer.
- the menu 232includes a "Telestration" feature 254 that allows an observer to annotate an image provided by to robot.
- the imagecan be a document or an X-ray.
- An observercan annotate the image, for example to circle and area of the X-ray to help communicate with a patient at the robot site.
- the master or any observercan enable a cursor function by selecting a "Live Cursor" icon 256. Selecting the icon 256 allows the user to move a cursor 258 that is overlayed on the robot video image.
- the cursor 258is provided on the image field 202 for all remote stations in a session.
- the master and observerscan each be designated a different color so that different cursors can be distinguished by the users.
- the cursor color 260can be displayed in the video image of the master or the observer.
- the robotmay connected to a medical instrument such as a stethoscope.
- a medical instrumentsuch as a stethoscope.
- the "Stethescope" feature 262 of the pull down menu 232allows the observers to receive instrument input from the stethoscope.
- the menu 232may have a "Give This User Master Control” feature 264 that allows the selected observer to become a master user. The master can also disconnect an observer by selecting the "Disconnect This User" feature 266.
- Figure 9shows a user interface 270 for observer.
- the interfacedoes not include robot control functions unless enabled by the master user.
- the interface 270is similar to the master DUI 200, but lacks certain robot controls.
- both the robot view field 202 and the station view field 204may have associated graphics to vary the video and audio displays.
- each fieldmay have graphical slide bars 280 and 282 to vary the zoom and brightness of the cameras, respectively.
- a still picturemay be taken at either the robot or remote station by selecting one of the graphical camera icons 284.
- the still picturemay be the image presented at the corresponding field 202 or 204 at the time the camera icon 284 is selected. Capturing and playing back video can be taken through graphical icons 286.
- a return to real time videocan be resumed, after the taking of a still picture, captured video, or reviewing a slide show, by selecting a graphical LIVE button 288.
- the local controlscan include slide bars for the local station speaker 290 and microphone 292. Also displayed is a microphone meter icon 294 that varies with the volume of the user's voice.
- the robot volumemay be different from the user's input volume.
- the remote controlsalso includes a microphone meter icon 296 that represents the user's audio volume at the robot.
- the robotmay have a local volume control so that user's at the robot site can vary the robot speaker volume. Normally the meter icons 294 and 296 will represent essentially the same value.
- the robot volumemay be different from the user's input volume, for example, if the robot local volume control is adjusted the at the robot site. As shown in Figure 10 , if this occurs the volume slide bar 292 may be enabled to allow the user to vary the microphone.
- the DUImay also display a "Reset" button 298 that can be selected to automatically reset the robot speaker volume to a center position.
- the robot view field 202may include a "Video Mute To Robot” feature 300 which when selected prevents audio and video transmission to the robot from all remote stations.
- Field 202may also have a "Master/Robot Privacy” feature 302 that can prevent the observer stations from receiving robot video and audio from both the robot and the master control station.
- the master usercan also be allowed to control the bandwidth of the system by controlling the video feeds to the observer stations.
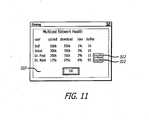
- Figure 11shows a dialog box 310 that displays the bandwidth usage of various participants in a session, along with network health parameters such as packet losses and jitter between participants. "Drop Vid" buttons 312 may be placed next to observer stations so that the master user can drop a particular observer's video.
- Figure 12shows a non-mobile robot head 320 that can both pivot and spin the camera 38 and the monitor 40.
- the robot head 320can be similar to the robot 12 but without the platform 110.
- the robot head 320may have the same mechanisms and parts to both pivot the camera 38 and monitor 40 about a pivot axis 4, and spin the camera 38 and monitor 40 about a spin axis 5.
- the pivot axismay intersect the spin axis. Having a robot head 320 that both pivots and spins provides a wide viewing area.
- the robot head 320may be in the system either with or instead of the mobile robot 12.
- a physician intensivistmay initiate a remote presence session with a robot in order to diagnose a patient in an Emergency Room.
- the physicianmay realize that the patient assessment will require consultation by a neurology specialist.
- the intensivistcalls the neurologist by phone, asking him to join the session.
- the neurologistopens his laptop, selects the robot in question from the robot list in the interface, and clicks "Connect”. Seeing the message in Fig. 7A , he clicks "OK” and then sees the message in Fig. 7B .
- the intensivistmeanwhile sees the message in Fig. 7C and clicks "Accept".
- the neurologistreceives the robot video and can hear both the robot-side audio and the intensivist.
- the intensivistuses the Live Cursor to point to the patient's face and EEG data on a wall.
- the neurologistobtains background information that can be provided by a nurse standing next to the patient and in front of the robot, as well as ICU-specific information provided by the intensivist on the master control station. Then, the neurologist can provide an audio assessment of the patient's condition.
- the intensivistthen right-clicks on the thumbnail image of the neurologist in field 288, and clicks the appropriate features in the pull-down menu to allow the neurologist to be seen and heard on the robot.
- the neurologistcan then inform both the patient and family of the condition.
- a surgeonmay be logged onto a robot and performing rounds in patient rooms within a hospital. Residents from hospitals in other cities join the session in the manner described above. The surgeon describes what he is doing to the residents, who may ask questions, and thereby learn the best way to round patients.
- a hospital CEOmay connect to the robot, and telephones three prospective doctors whom the hospital is courting to join the staff. These doctors each join the session as discussed above. The CEO then uses the joystick to drive the robot through the hospital, performing a virtual tour, and discusses the facility with the observer physicians.
- a sales VP of an MRI manufacturing companymay connect to a robot in the laboratory wing of a hospital, and then phones the COO of a different hospital to join the session.
- the sales VPdrives the robot into the MRI lab and drives around the MRI machine, describing its features.
- An on-site MRI technicianoperates certain controls on the direction of the sales VP.
- the sales VPexplains to the COO the various benefits of purchasing the MRI machine.
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- General Business, Economics & Management (AREA)
- Business, Economics & Management (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Biophysics (AREA)
- Heart & Thoracic Surgery (AREA)
- Software Systems (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Surgery (AREA)
- Molecular Biology (AREA)
- Computer Networks & Wireless Communication (AREA)
- Pathology (AREA)
- Audiology, Speech & Language Pathology (AREA)
- Nursing (AREA)
- Manipulator (AREA)
- Measuring And Recording Apparatus For Diagnosis (AREA)
- Telephonic Communication Services (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
- The subject matter disclosed generally relates to the field of robotics.
- Robots have been used in a variety of applications ranging from remote control of hazardous material to assisting in the performance of surgery. For example,
U.S. Patent No. 5,762,458 issued to Wang et al. discloses a system that allows a surgeon to perform minimally invasive medical procedures through the use of robotically controlled instruments. One of the robotic arms in the Wang system moves an endoscope that has a camera. The camera allows a surgeon to view a surgical area of a patient. - There has been marketed a mobile tele-presence robot introduced by InTouch Technologies, Inc., the assignee of this application, under the trademark RP-7. The InTouch robot is controlled by a user at a remote station. The remote station may be a personal computer with a joystick that allows the user to remotely control the movement of the robot. Both the robot and remote station have cameras, monitors, speakers and microphones to allow for two-way video/audio communication. The robot camera provides video images to a screen at the remote station so that the user can view the robot's surroundings and move the robot accordingly.
U.S. Pat. 7,158,860 issued to Wang et al. and assigned to the owner of the present application, InTouch Technologies, Inc. discloses a tele-presence robot system that includes a primary remote control station and one or more secondary control stations that are all linked to a tele-presence robot. The system allows the secondary stations to observe the video/audio feed provided by the robot. This allows the users of the secondary station to be trained through the robot and primary station. It would be desirable to modify such a system to implement more features such as the ability for two-way communication between stations, or the transfer of robot control to one of the secondary stations.- A remote controlled robot system that comprises a first remote control station receiving video from a robot, said first remote control station located at a first location and a second remote control station receiving video from said robot, said second remote control station located at a second location different from said first location, wherein the first remote control station is a master remote control station having exclusive control of the robot and the second remote control station is an observer remote control station.
- The said first remote station displays a display user interface including a robot view field that displays said video provided by said robot, an observer view field that displays observer information about an observer at the observer remote control station, and a manually selectable feature that allows the master remote control station to transfer control of said robot to the observer remote station.
Figure 1 is an illustration of a robotic system;Figure 2 is a schematic of an electrical system of a robot;Figure 3 is side view of the robot;Figure 4 is a schematic of a robotic system wherein multiple remote stations are coupled to the robot;Figure 5 is an illustration of a user interface;Figure 6 is an illustration of a message popup of the user interface;Figures 7A-C are illustrations of graphical messages;Figure 8 is an illustration of the user interface shown inFig. 5 with a pull-down menu;Figure 9 is an illustration showing a user interface for an observer remote control station;Figure 10 is an illustration similar toFig. 5 showing microphone volume control features;Figure 11 is an illustration of a dialog box showing bandwidth requirement of the system during a session;Figure 12 is a side view of a robot head.- Disclosed is a graphical user interface for a remote controlled robot system that includes a robot view field that displays information provided by a robot and an observer view field that displays observer information about one or more observers that can receive the robot information. The interface has various features that allow a master user to control the observation and participation of observers..
- Referring to the drawings more particularly by reference numbers,
Figure 1 shows an embodiment ofrobot system 10. Therobot system 10 includes arobot 12, abase station 14 and a plurality ofremote control stations 16. Eachremote control station 16 may be coupled to thebase station 14 through anetwork 18. By way of example, thenetwork 18 may be either a packet switched network such as the Internet, or a circuit switched network such has a Public Switched Telephone Network (PSTN) or other broadband system. Thebase station 14 may be coupled to thenetwork 18 by amodem 20 or other broadband network interface device. - Each
remote control station 16 may include acomputer 22 that has amonitor 24, acamera 26, amicrophone 28 and aspeaker 30. Thecomputer 22 may also contain aninput device 32 such as a joystick or a mouse. Eachcontrol station 16 is typically located in a place that is remote from therobot 12. Although only onerobot 12 is shown, it is to be understood that thesystem 10 may have a plurality ofrobots 12. In general any number ofrobots 12 may be controlled by any number of remote stations. For example, oneremote station 16 may be coupled to a plurality ofrobots 12, or onerobot 12 may be coupled to a plurality ofremote stations 16. - The
robot 12 includes amovement platform 34 that is attached to arobot housing 36. Also attached to therobot housing 36 are acamera 38, amonitor 40, a microphone(s) 42 and aspeaker 44. Themicrophone 42 andspeaker 30 may create a stereophonic sound. Therobot 12 may also have anantenna 46 that is wirelessly coupled to anantenna 48 of thebase station 14. Thesystem 10 allows a user at theremote control station 16 to move therobot 12 through theinput device 32. Therobot camera 38 is coupled to theremote monitor 24 so that a user at theremote station 16 can view a patient. Likewise, therobot monitor 40 is coupled to theremote camera 26 so that the patient can view the user. Themicrophones speakers - Each
remote station computer 22 may operate Microsoft OS software and WINDOWS XP or other operating systems such as LINUX. Theremote computer 22 may also operate a video driver, a camera driver, an audio driver and a joystick driver. The video images may be transmitted and received with compression software such as MPEG CODEC. Figures 2 and3 show an embodiment of therobot 12. Therobot 12 may include a highlevel control system 50 and a lowlevel control system 52. The highlevel control system 50 may include aprocessor 54 that is connected to abus 56. The bus is coupled to thecamera 38 by an input/output (I/O)port 58, and to themonitor 40 by aserial output port 60 and aVGA driver 62. Themonitor 40 may include a touchscreen function that allows the patient to enter input by touching the monitor screen.- The
speaker 44 is coupled to thebus 56 by a digital toanalog converter 64. Themicrophone 42 is coupled to thebus 56 by an analog todigital converter 66. Thehigh level controller 50 may also contain random access memory (RAM)device 68, anon-volatile RAM device 70 and amass storage device 72 that are all coupled to thebus 62. Themass storage device 72 may contain medical files of the patient that can be accessed by the user at theremote control station 16. For example, themass storage device 72 may contain a picture of the patient. The user, particularly a health care provider, can recall the old picture and make a side by side comparison on themonitor 24 with a present video image of the patient provided by thecamera 38. Therobot antennae 46 may be coupled to a wireless transceiver 74. By way of example, the transceiver 74 may transmit and receive information in accordance with IEEE 802.11b. - The
controller 54 may operate with a LINUX OS operating system. Thecontroller 54 may also operate MS WINDOWS along with video, camera and audio drivers for communication with theremote control station 16. Video information may be transceived using MPEG CODEC compression techniques. The software may allow the user to send e-mail to someone at the robot site and vice versa, or allow someone at the robot site to access the Internet. In general thehigh level controller 50 operates to control the communication between therobot 12 and theremote control station 16. - The
high level controller 50 may be linked to thelow level controller 52 byserial port 76. Thelow level controller 52 runs software routines that mechanically actuate therobot 12. For example, thelow level controller 52 provides instructions to actuate the movement platform to move therobot 12. Thelow level controller 52 may receive movement instructions from thehigh level controller 50. The movement instructions may be received as movement commands from the remote control station. Although two controllers are shown, it is to be understood that therobot 12 may have one controller controlling the high and low level functions. Figure 3 shows an embodiment of therobot 12. Therobot 12 may include aholonomic platform 110 that is attached to arobot housing 112. Theholonomic platform 110 provides three degrees of freedom to allow therobot 12 to move in any direction.- The
robot 12 may have ahead 114 that supports thecamera 38 and themonitor 40. Thehead 114 may have two degrees of freedom so that thecamera 26 and monitor 24 can swivel and pivot as indicated by the arrows. - The system may be the same or similar to a robot system provided by the assignee InTouch-Health, Inc. of Santa Barbara, California under the trademark RP-7. The system may also be the same or similar to the system disclosed in
U.S. Patent No. 6,925,357 issued August 2, 2005 . - In operation, the
robot 12 may be placed in a home, public or commercial property, or a facility where one or more patients are to be monitored and/or assisted. The facility may be a hospital or a residential care facility. By way of example, therobot 12 may be placed in a home where a health care provider may monitor and/or assist the patient. Likewise, a friend or family member may communicate with the patient. The cameras and monitors at both the robot and remote control stations allow for teleconferencing between the patient and the person at the remote station(s). - The
robot 12 can be maneuvered through the home, property or facility by manipulating theinput device 32 at aremote station 16. - The
robot 10 may be controlled by a number of different users. To accommodate for this the robot may have an arbitration system. The arbitration system may be integrated into the operating system of therobot 12. For example, the arbitration technique may be embedded into the operating system of the high-level controller 50. - By way of example, the users may be divided into classes that include the robot itself, a local user, a caregiver, a doctor, a family member, or a service provider. The
robot 12 may override input commands that conflict with robot operation. For example, if the robot runs into a wall, the system may ignore all additional commands to continue in the direction of the wall. A local user is a person who is physically present with the robot. The robot could have an input device that allows local operation. For example, the robot may incorporate a voice recognition system that receives and interprets audible commands. - A caregiver is someone who remotely monitors the patient. A doctor is a medical professional who can remotely control the robot and also access medical files contained in the robot memory. The family and service users remotely access the robot. The service user may service the system such as by upgrading software, or setting operational parameters.
- Message packets may be transmitted between a
robot 12 and aremote station 16. The packets provide commands and feedback. Each packet may have multiple fields. By way of example, a packet may include an ID field a forward speed field, an angular speed field, a stop field, a bumper field, a sensor range field, a configuration field, a text field and a debug field. - The identification of remote users can be set in an ID field of the information that is transmitted from the
remote control station 16 to therobot 12. For example, a user may enter a user ID into a setup table in the application software run by theremote control station 16. The user ID is then sent with each message transmitted to the robot. - The
robot 12 may operate in one of two different modes; an exclusive mode, or a sharing mode. In the exclusive mode only one user has access control of the robot. The exclusive mode may have a priority assigned to each type of user. By way of example, the priority may be in order of local, doctor, caregiver, family and then service user. In the sharing mode two or more users may share access with the robot. For example, a caregiver may have access to the robot, the caregiver may then enter the sharing mode to allow a doctor to also access the robot. Both the caregiver and the doctor can conduct a simultaneous tele-conference with the patient. - The arbitration scheme may have one of four mechanisms; notification, timeouts, queue and call back. The notification mechanism may inform either a present user or a requesting user that another user has, or wants, access to the robot. The timeout mechanism gives certain types of users a prescribed amount of time to finish access to the robot. The queue mechanism is an orderly waiting list for access to the robot. The call back mechanism informs a user that the robot can be accessed. By way of example, a family user may receive an e-mail message that the robot is free for usage. Tables 1 and 2, show how the mechanisms resolve access request from the various users.
Table I User Access Control Medical Record Command Override Software/Debug Access Set Priority Robot No No Yes (1) No No Local No No Yes (2) No No Caregiver Yes Yes Yes (3) No No Doctor No Yes No No No Family No No No No No Service Yes No Yes Yes Yes 

- The information transmitted between the
station 16 and therobot 12 may be encrypted. Additionally, the user may have to enter a password to enter thesystem 10. A selected robot is then given an electronic key by thestation 16. Therobot 12 validates the key and returns another key to thestation 16. The keys are used to encrypt information transmitted in the session. Figure 4 shows a system with a plurality ofremote stations robot 12 through thenetwork 18. The system can be set into a session mode wherein a masterremote station 16A controls movement of the robot and receives both video and audio information from the robot camera and speaker, respectively. Theobserver stations robot 12 and thestation 16A. This mode allows multiple users atstations station 16A moves the robot.- During a session the master
remote station 16A can retransmit the audio/visual information received from therobot 12 to theobserver stations remote station 16A can instruct the robot to transmit the audio and visual information to themaster 16A, and theobserver remote station master station 16A. - The session mode allows for training through the robot. For example, the master
remote station 16A may be operated by a physician who moves the robot into visual and audio contact with a patient. The observerremote stations 16B an 16C may be manned by personnel such as interns that observe and receive instructional training on providing care giving to the patient. Although instruction of medical personnel is described, the system can be used to train any group of users that are remotely located from a training area. For example, the system may be used to train personnel at a department store or allow potential buyers of real estate property to remotely view the property. Figure 5 shows a display user interface ("DUI") 200 displayed at themaster control station 16A. TheDUI 200 may include arobot view field 202 that displays a video image captured by the camera of the robot. TheDUI 200 may also include astation view field 204 that displays a video image provided by the camera of the masterremote station 16A. TheDUI 200 may be part of an application program stored and operated by thecomputer 22 of theremote station 16A.- The
DUI 200 may include a "Connect"button 206 that can be selected to connect the station to a robot. Selection of theConnect button 206 may cause the display of pull-down screens, etc. that allow the user to select a desired robot. System settings and options can be selected throughbuttons - One of the options is to allow for multicasting.
Figure 6 shows amenu 212 with an "Enable Multicasting"box 214 that can be "checked" to allow for other remote station to join a multi-cast session. - A user at an observer station may attempt a connection with the same robot. If a robot is already in use the screen may display a
message box 216 as shown inFigure 7A . Themessage box 216 includes an "OK"button 218 that allows the user to request joining the session as an observer. If the user presently connected to the robot has not enabled the multicasting feature then amessage 220 may be displayed indicating this fact as shown inFigure 7B . If the user selected theOK button 218 then the master user may receive themessage 222 shown inFigure 7C . The message includes an "Accept"button 224 and a "Deny"button 226 that allows the master user to accept or deny the request to observe the session, respectively. When an observer is accepted the observers may receive the audio/video feeds from by the robot. - User's that are accepted are displayed in an
observer view field 228 of the mastercontrol station DUI 200 shown inFig. 5 . Thefield 228 can provide video images of the users captured by the cameras of the observer remote control stations. Each video image may also include a caption of the observer's name. The field includes a scroll downtab 230 that allows the master user to scroll down the video images of the observers. - The master user can right click on any observer video image to display the pull down
menu 232 shown inFigure 8 . The pull downmenu 228 allows the master user to select various options for the selected observer. The pull downmenu 232 includes an "Allow The Robot To Hear This User"feature 234 that can be selected so that the observer can provide audio to the robot. The system may allow for simultaneous three way audio between the robot, master user and one observer. Both the master and the observer stations include a "Push To Talk"icon 236. If there is more than one observer then the "Push To Talk"icon 236 is enabled and the observer must continuously select theicon 232 to talk, much like a walkie-talkie button. The space bar may also be pushed after theicon 236 is selected to allow audio communication to the robot. When Push To Talk is selected then anicon 238 can be displayed in the observers video image to indicate which observer is providing audio input to the robot. The master and observer stations may also have a "Local Talk"icon 240. Selecting the Local Talk icon allows for textual communication between just the remote stations, popping up a text chat dialog box within each interface, which allows the master and observers to exchange text messages. Prior to displaying the text chat dialog box, a popup dialog box (not shown) may be displayed to the user who initiated Local Talk, which would list all current session participants, and allow the user to select only those participants to be part of the Local Talk. There may be a "Limit Voice" box (not shown) that can be selected to limit audio output of participants in the local chat to only those other remote stations participating in the local chat. - An "Allow Robot To See This User"
feature 242 can be selected so that the observer's video image is provided to the monitor of the robot instead of the master user's video image. The observer's video image may be displayed in thestation view field 204 when that observer's image is provided to the robot. The "Allow This User To See Robot Video" 244 and "Allow This User To Hear Robot Audio" features 246 can be selected so that the observer receives the video and audio feeds from the robot, respectively. - The "Head Control"
feature 248 allows the selected observer to control the robot head to move the robot camera. The "Driving"feature 250 allows the observer to drive the robot. When the Driving feature is selected robot data such as position sensor data, battery power, etc. are provided to the selected observer's remote station. The "Camera & Aux Video Control" feature 252 allows the observer to control robot camera functions such as zoom, brightness, etc. The master no longer has the head, driving and camera controls when these features are transferred to an observer. - The
menu 232 includes a "Telestration" feature 254 that allows an observer to annotate an image provided by to robot. For example, the image can be a document or an X-ray. An observer can annotate the image, for example to circle and area of the X-ray to help communicate with a patient at the robot site. The master or any observer can enable a cursor function by selecting a "Live Cursor"icon 256. Selecting theicon 256 allows the user to move acursor 258 that is overlayed on the robot video image. Thecursor 258 is provided on theimage field 202 for all remote stations in a session. The master and observers can each be designated a different color so that different cursors can be distinguished by the users. Thecursor color 260 can be displayed in the video image of the master or the observer. - The robot may connected to a medical instrument such as a stethoscope. The "Stethescope" feature 262 of the pull down
menu 232 allows the observers to receive instrument input from the stethoscope. Themenu 232 may have a "Give This User Master Control" feature 264 that allows the selected observer to become a master user. The master can also disconnect an observer by selecting the "Disconnect This User" feature 266. Figure 9 shows auser interface 270 for observer. The interface does not include robot control functions unless enabled by the master user. Theinterface 270 is similar to themaster DUI 200, but lacks certain robot controls.- Referring again to
Fig. 5 , both therobot view field 202 and thestation view field 204 may have associated graphics to vary the video and audio displays. For example, each field may have graphical slide bars 280 and 282 to vary the zoom and brightness of the cameras, respectively. A still picture may be taken at either the robot or remote station by selecting one of thegraphical camera icons 284. The still picture may be the image presented at thecorresponding field camera icon 284 is selected. Capturing and playing back video can be taken throughgraphical icons 286. A return to real time video can be resumed, after the taking of a still picture, captured video, or reviewing a slide show, by selecting agraphical LIVE button 288. - The local controls can include slide bars for the
local station speaker 290 andmicrophone 292. Also displayed is amicrophone meter icon 294 that varies with the volume of the user's voice. The robot volume may be different from the user's input volume. The remote controls also includes amicrophone meter icon 296 that represents the user's audio volume at the robot. The robot may have a local volume control so that user's at the robot site can vary the robot speaker volume. Normally themeter icons Figure 10 , if this occurs thevolume slide bar 292 may be enabled to allow the user to vary the microphone. The DUI may also display a "Reset"button 298 that can be selected to automatically reset the robot speaker volume to a center position. - Referring to
Fig. 5 , therobot view field 202 may include a "Video Mute To Robot"feature 300 which when selected prevents audio and video transmission to the robot from all remote stations.Field 202 may also have a "Master/Robot Privacy"feature 302 that can prevent the observer stations from receiving robot video and audio from both the robot and the master control station. - The master user can also be allowed to control the bandwidth of the system by controlling the video feeds to the observer stations.
Figure 11 shows adialog box 310 that displays the bandwidth usage of various participants in a session, along with network health parameters such as packet losses and jitter between participants. "Drop Vid"buttons 312 may be placed next to observer stations so that the master user can drop a particular observer's video. Figure 12 shows anon-mobile robot head 320 that can both pivot and spin thecamera 38 and themonitor 40. Therobot head 320 can be similar to therobot 12 but without theplatform 110. Therobot head 320 may have the same mechanisms and parts to both pivot thecamera 38 and monitor 40 about a pivot axis 4, and spin thecamera 38 and monitor 40 about aspin axis 5. The pivot axis may intersect the spin axis. Having arobot head 320 that both pivots and spins provides a wide viewing area. Therobot head 320 may be in the system either with or instead of themobile robot 12.- The system may have numerous applications. For example, a physician intensivist may initiate a remote presence session with a robot in order to diagnose a patient in an Emergency Room. Upon examining the patient, the physician may realize that the patient assessment will require consultation by a neurology specialist. The intensivist calls the neurologist by phone, asking him to join the session. Upon receiving the telephone request, the neurologist opens his laptop, selects the robot in question from the robot list in the interface, and clicks "Connect". Seeing the message in
Fig. 7A , he clicks "OK" and then sees the message inFig. 7B . The intensivist meanwhile sees the message inFig. 7C and clicks "Accept". At this point the neurologist receives the robot video and can hear both the robot-side audio and the intensivist. - The intensivist uses the Live Cursor to point to the patient's face and EEG data on a wall. The neurologist obtains background information that can be provided by a nurse standing next to the patient and in front of the robot, as well as ICU-specific information provided by the intensivist on the master control station. Then, the neurologist can provide an audio assessment of the patient's condition. The intensivist then right-clicks on the thumbnail image of the neurologist in
field 288, and clicks the appropriate features in the pull-down menu to allow the neurologist to be seen and heard on the robot. The neurologist can then inform both the patient and family of the condition. - In another application, a surgeon may be logged onto a robot and performing rounds in patient rooms within a hospital. Residents from hospitals in other cities join the session in the manner described above. The surgeon describes what he is doing to the residents, who may ask questions, and thereby learn the best way to round patients.
- In another application, a hospital CEO may connect to the robot, and telephones three prospective doctors whom the hospital is courting to join the staff. These doctors each join the session as discussed above. The CEO then uses the joystick to drive the robot through the hospital, performing a virtual tour, and discusses the facility with the observer physicians.
- In yet another application, a sales VP of an MRI manufacturing company may connect to a robot in the laboratory wing of a hospital, and then phones the COO of a different hospital to join the session. Upon joining, the sales VP drives the robot into the MRI lab and drives around the MRI machine, describing its features. An on-site MRI technician operates certain controls on the direction of the sales VP. The sales VP explains to the COO the various benefits of purchasing the MRI machine.
- While certain exemplary embodiments have been described and shown in the accompanying drawings, it is to be understood that such embodiments are merely illustrative of and not restrictive on the broad invention, and that this invention not be limited to the specific constructions and arrangements shown and described, since various other modifications may occur to those ordinarily skilled in the art.


Claims (14)
- A remote controlled robot system, comprising:a first remote control station (16A) receiving video from a robot (12), said first remote control station located at a first location;a second remote control station (16B) receiving video from said robot (12), said second remote control station located at a second location different from said first location;wherein said first remote station (16A) displays a display user interface (200) including:a robot view field (202) that displays said video provided by said robot (12); andwherein the first remote control station is a master remote control station having exclusive control of the robot and the second remote control station is an observer remote control station; andcharacterised in that the display user interface further comprises an observer view field (228) that displays observer information about an observer at the observer remote control station (16B), anda manually selectable feature (232, 248, 250) that allows the master remote control station to transfer control of said robot (12) to the observer remote station (16B).
- The system of claim 1, wherein said video is provided by a robot camera (38).
- The system of claim 1, further comprising a station view field (204) that display video provided by a camera of a remote control station (16A, 16B).
- The system of claim 1, further comprising one or more messages that allow an additional observer remote control station (16C) to join a session.
- The system of claim 1, further comprising a selectable feature (232) that:a) controls a transmission of audio from said observer remote control station (16B) to said robot (12); orb) controls a transmission of video from said observer remote control station (16B) to said robot (12); orc) controls a transmission of audio from said robot (12) to said observer remote control station (16B); ord) controls a transmission of video from said robot (12) to said observer remote control station (16B).
- The system of claim 1, further comprising a selectable feature that allows:a) said observer remote control station (16B) to control at least one camera parameter of said robot (12); orb) said observer remote control station (16B) to receive instrument data from an instrument coupled to said robot (12); orc) said observer remote control station (16B) to annotate said robot videos, said annotation being displayed in said robot view field (202).
- The system of claim 1, further comprising a selectable feature (266) that disconnects an observer remote control station (16B).
- The system of claim 1, wherein said observer view field (228) displays a video image provided by an observer remote control station (16B).
- The system of claim 1, further comprising a dialog box that displays a system bandwidth usage and allows a user to vary said system bandwidth usage.
- The system of claim 1, further comprising a selectable feature that allows communication only between a plurality of remote control stations.
- The system of any preceding claim further, comprising: a local microphone meter that represents a volume of audio provided to a microphone of a remote control station; and, a remote microphone meter that represents a volume of audio generated by a robot speaker.
- The system of claim 11, further comprising a selectable feature that can reset a robot speaker volume.
- The system of claim 11, further comprising a selectable feature to vary a volume of said remote control station microphone.
- The system of claim 11, wherein the manually selectable feature allows said observer remote control station (16B) to become a master remote control station (16A).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/218,258US9842192B2 (en) | 2008-07-11 | 2008-07-11 | Tele-presence robot system with multi-cast features |
| PCT/US2009/050170WO2010006211A1 (en) | 2008-07-11 | 2009-07-09 | Tele-presence robot system with multi-cast features |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2300930A1 EP2300930A1 (en) | 2011-03-30 |
| EP2300930A4 EP2300930A4 (en) | 2013-05-08 |
| EP2300930B1true EP2300930B1 (en) | 2015-07-01 |
Family
ID=41505890
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP09795215.4AActiveEP2300930B1 (en) | 2008-07-11 | 2009-07-09 | Tele-presence robot system with multi-cast features |
Country Status (6)
| Country | Link |
|---|---|
| US (3) | US9842192B2 (en) |
| EP (1) | EP2300930B1 (en) |
| JP (3) | JP2011528570A (en) |
| KR (3) | KR20160077226A (en) |
| CN (2) | CN102089751A (en) |
| WO (1) | WO2010006211A1 (en) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9251313B2 (en) | 2012-04-11 | 2016-02-02 | Intouch Technologies, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US9264664B2 (en) | 2010-12-03 | 2016-02-16 | Intouch Technologies, Inc. | Systems and methods for dynamic bandwidth allocation |
| US10399223B2 (en) | 2011-01-28 | 2019-09-03 | Intouch Technologies, Inc. | Interfacing with a mobile telepresence robot |
| US10878960B2 (en) | 2008-07-11 | 2020-12-29 | Teladoc Health, Inc. | Tele-presence robot system with multi-cast features |
| US11389064B2 (en) | 2018-04-27 | 2022-07-19 | Teladoc Health, Inc. | Telehealth cart that supports a removable tablet with seamless audio/video switching |
| US11636944B2 (en) | 2017-08-25 | 2023-04-25 | Teladoc Health, Inc. | Connectivity infrastructure for a telehealth platform |
| US11742094B2 (en) | 2017-07-25 | 2023-08-29 | Teladoc Health, Inc. | Modular telehealth cart with thermal imaging and touch screen user interface |
| US11787060B2 (en) | 2008-03-20 | 2023-10-17 | Teladoc Health, Inc. | Remote presence system mounted to operating room hardware |
| US11798683B2 (en) | 2010-03-04 | 2023-10-24 | Teladoc Health, Inc. | Remote presence system including a cart that supports a robot face and an overhead camera |
| US11862302B2 (en) | 2017-04-24 | 2024-01-02 | Teladoc Health, Inc. | Automated transcription and documentation of tele-health encounters |
| US12224059B2 (en) | 2011-02-16 | 2025-02-11 | Teladoc Health, Inc. | Systems and methods for network-based counseling |
Families Citing this family (85)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7362775B1 (en) | 1996-07-02 | 2008-04-22 | Wistaria Trading, Inc. | Exchange mechanisms for digital information packages with bandwidth securitization, multichannel digital watermarks, and key management |
| US6925357B2 (en) | 2002-07-25 | 2005-08-02 | Intouch Health, Inc. | Medical tele-robotic system |
| US20040162637A1 (en)* | 2002-07-25 | 2004-08-19 | Yulun Wang | Medical tele-robotic system with a master remote station with an arbitrator |
| US7813836B2 (en) | 2003-12-09 | 2010-10-12 | Intouch Technologies, Inc. | Protocol for a remotely controlled videoconferencing robot |
| US20050204438A1 (en) | 2004-02-26 | 2005-09-15 | Yulun Wang | Graphical interface for a remote presence system |
| US8077963B2 (en) | 2004-07-13 | 2011-12-13 | Yulun Wang | Mobile robot with a head-based movement mapping scheme |
| US20060052676A1 (en)* | 2004-09-07 | 2006-03-09 | Yulun Wang | Tele-presence system that allows for remote monitoring/observation and review of a patient and their medical records |
| US9198728B2 (en) | 2005-09-30 | 2015-12-01 | Intouch Technologies, Inc. | Multi-camera mobile teleconferencing platform |
| US8849679B2 (en)* | 2006-06-15 | 2014-09-30 | Intouch Technologies, Inc. | Remote controlled robot system that provides medical images |
| US8265793B2 (en) | 2007-03-20 | 2012-09-11 | Irobot Corporation | Mobile robot for telecommunication |
| US9160783B2 (en)* | 2007-05-09 | 2015-10-13 | Intouch Technologies, Inc. | Robot system that operates through a network firewall |
| US8179418B2 (en) | 2008-04-14 | 2012-05-15 | Intouch Technologies, Inc. | Robotic based health care system |
| US8170241B2 (en) | 2008-04-17 | 2012-05-01 | Intouch Technologies, Inc. | Mobile tele-presence system with a microphone system |
| US9193065B2 (en) | 2008-07-10 | 2015-11-24 | Intouch Technologies, Inc. | Docking system for a tele-presence robot |
| US8340819B2 (en) | 2008-09-18 | 2012-12-25 | Intouch Technologies, Inc. | Mobile videoconferencing robot system with network adaptive driving |
| US8996165B2 (en) | 2008-10-21 | 2015-03-31 | Intouch Technologies, Inc. | Telepresence robot with a camera boom |
| US9138891B2 (en)* | 2008-11-25 | 2015-09-22 | Intouch Technologies, Inc. | Server connectivity control for tele-presence robot |
| US8463435B2 (en) | 2008-11-25 | 2013-06-11 | Intouch Technologies, Inc. | Server connectivity control for tele-presence robot |
| US8849680B2 (en) | 2009-01-29 | 2014-09-30 | Intouch Technologies, Inc. | Documentation through a remote presence robot |
| US8897920B2 (en) | 2009-04-17 | 2014-11-25 | Intouch Technologies, Inc. | Tele-presence robot system with software modularity, projector and laser pointer |
| US11399153B2 (en)* | 2009-08-26 | 2022-07-26 | Teladoc Health, Inc. | Portable telepresence apparatus |
| US8384755B2 (en) | 2009-08-26 | 2013-02-26 | Intouch Technologies, Inc. | Portable remote presence robot |
| US20110187875A1 (en)* | 2010-02-04 | 2011-08-04 | Intouch Technologies, Inc. | Robot face used in a sterile environment |
| US11154981B2 (en)* | 2010-02-04 | 2021-10-26 | Teladoc Health, Inc. | Robot user interface for telepresence robot system |
| US8935005B2 (en) | 2010-05-20 | 2015-01-13 | Irobot Corporation | Operating a mobile robot |
| US9014848B2 (en) | 2010-05-20 | 2015-04-21 | Irobot Corporation | Mobile robot system |
| US8918213B2 (en) | 2010-05-20 | 2014-12-23 | Irobot Corporation | Mobile human interface robot |
| US10343283B2 (en) | 2010-05-24 | 2019-07-09 | Intouch Technologies, Inc. | Telepresence robot system that can be accessed by a cellular phone |
| US10808882B2 (en) | 2010-05-26 | 2020-10-20 | Intouch Technologies, Inc. | Tele-robotic system with a robot face placed on a chair |
| US8930019B2 (en) | 2010-12-30 | 2015-01-06 | Irobot Corporation | Mobile human interface robot |
| US12093036B2 (en) | 2011-01-21 | 2024-09-17 | Teladoc Health, Inc. | Telerobotic system with a dual application screen presentation |
| US9323250B2 (en) | 2011-01-28 | 2016-04-26 | Intouch Technologies, Inc. | Time-dependent navigation of telepresence robots |
| US10769739B2 (en) | 2011-04-25 | 2020-09-08 | Intouch Technologies, Inc. | Systems and methods for management of information among medical providers and facilities |
| US9098611B2 (en) | 2012-11-26 | 2015-08-04 | Intouch Technologies, Inc. | Enhanced video interaction for a user interface of a telepresence network |
| US20140139616A1 (en) | 2012-01-27 | 2014-05-22 | Intouch Technologies, Inc. | Enhanced Diagnostics for a Telepresence Robot |
| JP6009840B2 (en) | 2011-08-04 | 2016-10-19 | オリンパス株式会社 | Medical equipment |
| JP5936914B2 (en) | 2011-08-04 | 2016-06-22 | オリンパス株式会社 | Operation input device and manipulator system including the same |
| US9161772B2 (en) | 2011-08-04 | 2015-10-20 | Olympus Corporation | Surgical instrument and medical manipulator |
| JP5841451B2 (en) | 2011-08-04 | 2016-01-13 | オリンパス株式会社 | Surgical instrument and control method thereof |
| WO2013018861A1 (en) | 2011-08-04 | 2013-02-07 | オリンパス株式会社 | Medical manipulator and method for controlling same |
| JP6005950B2 (en) | 2011-08-04 | 2016-10-12 | オリンパス株式会社 | Surgery support apparatus and control method thereof |
| JP6081061B2 (en) | 2011-08-04 | 2017-02-15 | オリンパス株式会社 | Surgery support device |
| JP5953058B2 (en) | 2011-08-04 | 2016-07-13 | オリンパス株式会社 | Surgery support device and method for attaching and detaching the same |
| JP5931497B2 (en) | 2011-08-04 | 2016-06-08 | オリンパス株式会社 | Surgery support apparatus and assembly method thereof |
| JP6021353B2 (en)* | 2011-08-04 | 2016-11-09 | オリンパス株式会社 | Surgery support device |
| JP6021484B2 (en) | 2011-08-04 | 2016-11-09 | オリンパス株式会社 | Medical manipulator |
| WO2013018908A1 (en) | 2011-08-04 | 2013-02-07 | オリンパス株式会社 | Manipulator for medical use and surgery support device |
| JP6000641B2 (en) | 2011-08-04 | 2016-10-05 | オリンパス株式会社 | Manipulator system |
| KR101141603B1 (en)* | 2011-10-04 | 2012-05-17 | 국방과학연구소 | Method and apparatus for providing remote controlling for remote robot management in multi frequency environment |
| US8836751B2 (en) | 2011-11-08 | 2014-09-16 | Intouch Technologies, Inc. | Tele-presence system with a user interface that displays different communication links |
| US8902278B2 (en) | 2012-04-11 | 2014-12-02 | Intouch Technologies, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US9361021B2 (en) | 2012-05-22 | 2016-06-07 | Irobot Corporation | Graphical user interfaces including touchpad driving interfaces for telemedicine devices |
| WO2013176760A1 (en) | 2012-05-22 | 2013-11-28 | Intouch Technologies, Inc. | Graphical user interfaces including touchpad driving interfaces for telemedicine devices |
| US9426232B1 (en)* | 2012-08-21 | 2016-08-23 | Google Inc. | Geo-location based content publishing platform |
| US20160164976A1 (en)* | 2012-09-24 | 2016-06-09 | Suitable Technologies, Inc. | Systems and methods for remote presence |
| US10089633B2 (en)* | 2013-08-13 | 2018-10-02 | Amazon Technologies, Inc. | Remote support of computing devices |
| JP2016005083A (en)* | 2014-06-16 | 2016-01-12 | ソニー株式会社 | Information processing device, information processing method, and terminal device |
| US11042842B2 (en) | 2014-10-30 | 2021-06-22 | Douglas Winston Hines | System and method for a device to work collaboratively with an expert |
| US10296992B2 (en)* | 2016-02-10 | 2019-05-21 | Erick Motta | System and method that facilitates providing a virtual agent |
| JP2017208657A (en)* | 2016-05-17 | 2017-11-24 | 富士電機株式会社 | Observation apparatus and observation system |
| WO2018089334A1 (en)* | 2016-11-10 | 2018-05-17 | Think Surgical, Inc. | Remote mentoring station |
| US11256251B2 (en) | 2017-02-06 | 2022-02-22 | Telefonaktiebolaget Lm Ericsson (Publ) | Enabling remote control of a vehicle |
| FR3074315B1 (en)* | 2017-11-30 | 2022-12-16 | Marc Lambert | DEVICES AND METHODS OF A TELEPRESENCE SYSTEM ADAPTED TO THE TELECONTROL OF MOTORIZED LAND VEHICLES |
| CN108081283B (en)* | 2017-12-11 | 2021-02-09 | 淮南师范学院 | Medical treatment is with automatic robot that coincide of safe type |
| CN108600621B (en)* | 2018-04-13 | 2020-10-20 | 北京航天自动控制研究所 | Method for solving problem that screen popup cannot be captured due to too fast speed |
| KR101947160B1 (en)* | 2018-06-20 | 2019-02-12 | (주)코딩앤플레이 | Coding education method using augmented reality |
| CN109147960A (en)* | 2018-07-12 | 2019-01-04 | 上海医修哥网络科技股份有限公司 | A kind of remote multi-person plural consultation intelligent robot |
| JP2020042764A (en)* | 2018-09-06 | 2020-03-19 | 株式会社Soken | Vehicle remote operation assistance system |
| JP7067503B2 (en)* | 2019-01-29 | 2022-05-16 | トヨタ自動車株式会社 | Information processing equipment and information processing methods, programs |
| WO2020264418A1 (en)* | 2019-06-28 | 2020-12-30 | Auris Health, Inc. | Console overlay and methods of using same |
| CN110497406B (en)* | 2019-08-14 | 2021-04-16 | 北京猎户星空科技有限公司 | Equipment grouping method, device, equipment and medium |
| CN111421537A (en)* | 2020-03-19 | 2020-07-17 | 武汉联影智融医疗科技有限公司 | Remote control system |
| CN115361930A (en)* | 2020-04-10 | 2022-11-18 | 川崎重工业株式会社 | Mobile body system for medical use and operation method thereof |
| WO2021206161A1 (en)* | 2020-04-10 | 2021-10-14 | 川崎重工業株式会社 | Diagnosis/treatment assistance robot, diagnosis/treatment assistance robot system, and diagnosis/treatment assistance method |
| US11619935B2 (en)* | 2020-07-17 | 2023-04-04 | Blue Ocean Robotics Aps | Methods of controlling a mobile robot device from one or more remote user devices |
| JP7420047B2 (en)* | 2020-10-21 | 2024-01-23 | トヨタ自動車株式会社 | robot system |
| WO2022138652A1 (en)* | 2020-12-24 | 2022-06-30 | 川崎重工業株式会社 | Robot system and robot work method |
| JP7569742B2 (en)* | 2021-04-15 | 2024-10-18 | 本田技研工業株式会社 | SERVER, REMOTE CONTROL SYSTEM, REMOTE CONTROL METHOD, AND PROGRAM |
| KR20220165948A (en)* | 2021-06-09 | 2022-12-16 | 주식회사 버넥트 | Method and system for remote collaboration |
| US11669087B2 (en) | 2021-07-15 | 2023-06-06 | Howe & Howe Inc. | Controlling and monitoring remote robotic vehicles |
| US20230059343A1 (en)* | 2021-08-21 | 2023-02-23 | Ix Innovation Llc | Telemetry-based control of robotic systems |
| DE102022204067B4 (en)* | 2022-04-27 | 2025-08-14 | Siemens Healthineers Ag | Procedure for automatic allocation and display of responsibilities in telemedical procedures and overall system |
| JP2024048960A (en)* | 2022-09-28 | 2024-04-09 | 株式会社メディカロイド | Remote surgery support system and operating device for supervising surgeon |
| US20250099193A1 (en) | 2023-09-27 | 2025-03-27 | Sovato Health, Inc. | Systems and methods for remotely controlling robotic surgery |
| US12042239B1 (en) | 2023-11-15 | 2024-07-23 | Sovato Health, Inc. | Systems and methods for remotely controlling multiple robotic-assisted surgery systems |
Family Cites Families (751)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US719979A (en)* | 1902-06-02 | 1903-02-03 | Claude A P Turner | Suspended car-transfer. |
| US3821995A (en) | 1971-10-15 | 1974-07-02 | E Aghnides | Vehicle with composite wheel |
| US4107689A (en) | 1976-06-07 | 1978-08-15 | Rca Corporation | System for automatic vehicle location |
| US4213182A (en) | 1978-12-06 | 1980-07-15 | General Electric Company | Programmable energy load controller system and methods |
| US4413693A (en) | 1981-03-27 | 1983-11-08 | Derby Sherwin L | Mobile chair |
| US6317953B1 (en) | 1981-05-11 | 2001-11-20 | Lmi-Diffracto | Vision target based assembly |
| US5148591A (en) | 1981-05-11 | 1992-09-22 | Sensor Adaptive Machines, Inc. | Vision target based assembly |
| US4471354A (en) | 1981-11-23 | 1984-09-11 | Marathon Medical Equipment Corporation | Apparatus and method for remotely measuring temperature |
| US4519466A (en) | 1982-03-30 | 1985-05-28 | Eiko Shiraishi | Omnidirectional drive system |
| EP0108657B1 (en) | 1982-09-25 | 1987-08-12 | Fujitsu Limited | A multi-articulated robot |
| US4625274A (en) | 1983-12-05 | 1986-11-25 | Motorola, Inc. | Microprocessor reset system |
| US4572594A (en) | 1984-02-08 | 1986-02-25 | Schwartz C Bruce | Arthroscopy support stand |
| US4638445A (en) | 1984-06-08 | 1987-01-20 | Mattaboni Paul J | Autonomous mobile robot |
| US4766581A (en) | 1984-08-07 | 1988-08-23 | Justin Korn | Information retrieval system and method using independent user stations |
| US4553309A (en) | 1984-09-26 | 1985-11-19 | General Motors Corporation | Robotic assembly of vehicle headliners |
| JPS6180410A (en) | 1984-09-28 | 1986-04-24 | Yutaka Kanayama | Drive command system of mobile robot |
| JPS61111863A (en) | 1984-11-05 | 1986-05-29 | Nissan Motor Co Ltd | Robotic assembly equipment |
| US4679152A (en) | 1985-02-20 | 1987-07-07 | Heath Company | Navigation system and method for a mobile robot |
| US4697278A (en) | 1985-03-01 | 1987-09-29 | Veeder Industries Inc. | Electronic hub odometer |
| US4652204A (en) | 1985-08-02 | 1987-03-24 | Arnett Edward M | Apparatus for handling hazardous materials |
| US4733737A (en) | 1985-08-29 | 1988-03-29 | Reza Falamak | Drivable steerable platform for industrial, domestic, entertainment and like uses |
| US4709265A (en) | 1985-10-15 | 1987-11-24 | Advanced Resource Development Corporation | Remote control mobile surveillance system |
| US4777416A (en) | 1986-05-16 | 1988-10-11 | Denning Mobile Robotics, Inc. | Recharge docking system for mobile robot |
| US4751658A (en) | 1986-05-16 | 1988-06-14 | Denning Mobile Robotics, Inc. | Obstacle avoidance system |
| SE455539B (en) | 1986-05-23 | 1988-07-18 | Electrolux Ab | ELECTROOPTIC POSITION KNOWLEDGE SYSTEM FOR A PLAN REALLY FORMULA, PREFERRED A MOBILE ROBOT |
| US4803625A (en) | 1986-06-30 | 1989-02-07 | Buddy Systems, Inc. | Personal health monitor |
| US4878501A (en) | 1986-09-24 | 1989-11-07 | Shue Ming Jeng | Electronic stethoscopic apparatus |
| JPS63289607A (en) | 1987-05-21 | 1988-11-28 | Toshiba Corp | Inter-module communication control system for intelligent robot |
| US4847764C1 (en) | 1987-05-21 | 2001-09-11 | Meditrol Inc | System for dispensing drugs in health care instituions |
| JPH0191834A (en) | 1987-08-20 | 1989-04-11 | Tsuruta Hiroko | Abnormal data detection and information method in individual medical data central control system |
| US4942538A (en) | 1988-01-05 | 1990-07-17 | Spar Aerospace Limited | Telerobotic tracker |
| US5193143A (en) | 1988-01-12 | 1993-03-09 | Honeywell Inc. | Problem state monitoring |
| US4979949A (en) | 1988-04-26 | 1990-12-25 | The Board Of Regents Of The University Of Washington | Robot-aided system for surgery |
| US5142484A (en) | 1988-05-12 | 1992-08-25 | Health Tech Services Corporation | An interactive patient assistance device for storing and dispensing prescribed medication and physical device |
| US5008804A (en) | 1988-06-23 | 1991-04-16 | Total Spectrum Manufacturing Inc. | Robotic television-camera dolly system |
| US5040116A (en) | 1988-09-06 | 1991-08-13 | Transitions Research Corporation | Visual navigation and obstacle avoidance structured light system |
| US5157491A (en) | 1988-10-17 | 1992-10-20 | Kassatly L Samuel A | Method and apparatus for video broadcasting and teleconferencing |
| US5155684A (en) | 1988-10-25 | 1992-10-13 | Tennant Company | Guiding an unmanned vehicle by reference to overhead features |
| US4953159A (en) | 1989-01-03 | 1990-08-28 | American Telephone And Telegraph Company | Audiographics conferencing arrangement |
| US5016173A (en) | 1989-04-13 | 1991-05-14 | Vanguard Imaging Ltd. | Apparatus and method for monitoring visually accessible surfaces of the body |
| US5006988A (en) | 1989-04-28 | 1991-04-09 | University Of Michigan | Obstacle-avoiding navigation system |
| US4977971A (en) | 1989-05-17 | 1990-12-18 | University Of Florida | Hybrid robotic vehicle |
| US5224157A (en) | 1989-05-22 | 1993-06-29 | Minolta Camera Kabushiki Kaisha | Management system for managing maintenance information of image forming apparatus |
| US5051906A (en) | 1989-06-07 | 1991-09-24 | Transitions Research Corporation | Mobile robot navigation employing retroreflective ceiling features |
| JP3002206B2 (en) | 1989-06-22 | 2000-01-24 | 神鋼電機株式会社 | Travel control method for mobile robot |
| US5341854A (en) | 1989-09-28 | 1994-08-30 | Alberta Research Council | Robotic drug dispensing system |
| US5084828A (en) | 1989-09-29 | 1992-01-28 | Healthtech Services Corp. | Interactive medication delivery system |
| JP2964518B2 (en) | 1990-01-30 | 1999-10-18 | 日本電気株式会社 | Voice control method |
| JP2679346B2 (en) | 1990-03-28 | 1997-11-19 | 神鋼電機株式会社 | Charging control method for mobile robot system |
| US5130794A (en) | 1990-03-29 | 1992-07-14 | Ritchey Kurtis J | Panoramic display system |
| JP2921936B2 (en) | 1990-07-13 | 1999-07-19 | 株式会社東芝 | Image monitoring device |
| US6958706B2 (en) | 1990-07-27 | 2005-10-25 | Hill-Rom Services, Inc. | Patient care and communication system |
| JP2541353B2 (en) | 1990-09-18 | 1996-10-09 | 三菱自動車工業株式会社 | Active suspension system for vehicles |
| US5563998A (en) | 1990-10-19 | 1996-10-08 | Moore Business Forms, Inc. | Forms automation system implementation |
| US5276445A (en) | 1990-11-30 | 1994-01-04 | Sony Corporation | Polling control system for switching units in a plural stage switching matrix |
| US5310464A (en) | 1991-01-04 | 1994-05-10 | Redepenning Jody G | Electrocrystallization of strongly adherent brushite coatings on prosthetic alloys |
| JPH0530502A (en) | 1991-07-24 | 1993-02-05 | Hitachi Ltd | Integrated video phone |
| US5217453A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| DE4291016T1 (en) | 1991-04-22 | 1993-05-13 | Evans & Sutherland Computer Corp., Salt Lake City, Utah, Us | |
| US5231693A (en) | 1991-05-09 | 1993-07-27 | The United States Of America As Represented By The Administrator, National Aeronautics And Space Administration | Telerobot control system |
| US5341459A (en) | 1991-05-09 | 1994-08-23 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Generalized compliant motion primitive |
| US7382399B1 (en) | 1991-05-13 | 2008-06-03 | Sony Coporation | Omniview motionless camera orientation system |
| JP3173042B2 (en) | 1991-05-21 | 2001-06-04 | ソニー株式会社 | Robot numerical controller |
| US5417210A (en) | 1992-05-27 | 1995-05-23 | International Business Machines Corporation | System and method for augmentation of endoscopic surgery |
| US5182641A (en) | 1991-06-17 | 1993-01-26 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Composite video and graphics display for camera viewing systems in robotics and teleoperation |
| US5366896A (en) | 1991-07-30 | 1994-11-22 | University Of Virginia Alumni Patents Foundation | Robotically operated laboratory system |
| US5441042A (en) | 1991-08-05 | 1995-08-15 | Putman; John M. | Endoscope instrument holder |
| IL99420A (en) | 1991-09-05 | 2000-12-06 | Elbit Systems Ltd | Helmet mounted display |
| WO1993006690A1 (en) | 1991-09-17 | 1993-04-01 | Radamec Epo Limited | Setting-up system for remotely controlled cameras |
| US5186270A (en) | 1991-10-24 | 1993-02-16 | Massachusetts Institute Of Technology | Omnidirectional vehicle |
| US5419008A (en) | 1991-10-24 | 1995-05-30 | West; Mark | Ball joint |
| US5631973A (en) | 1994-05-05 | 1997-05-20 | Sri International | Method for telemanipulation with telepresence |
| CA2128606C (en) | 1992-01-21 | 2008-07-22 | Philip S. Green | Teleoperator system and method with telepresence |
| EP0559348A3 (en) | 1992-03-02 | 1993-11-03 | AT&T Corp. | Rate control loop processor for perceptual encoder/decoder |
| US5441047A (en) | 1992-03-25 | 1995-08-15 | David; Daniel | Ambulatory patient health monitoring techniques utilizing interactive visual communication |
| US5544649A (en) | 1992-03-25 | 1996-08-13 | Cardiomedix, Inc. | Ambulatory patient health monitoring techniques utilizing interactive visual communication |
| US5262944A (en) | 1992-05-15 | 1993-11-16 | Hewlett-Packard Company | Method for use of color and selective highlighting to indicate patient critical events in a centralized patient monitoring system |
| US5594859A (en) | 1992-06-03 | 1997-01-14 | Digital Equipment Corporation | Graphical user interface for video teleconferencing |
| US5375195A (en) | 1992-06-29 | 1994-12-20 | Johnston; Victor S. | Method and apparatus for generating composites of human faces |
| US5762458A (en) | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US5374879A (en) | 1992-11-04 | 1994-12-20 | Martin Marietta Energy Systems, Inc. | Omni-directional and holonomic rolling platform with decoupled rotational and translational degrees of freedom |
| US5600573A (en) | 1992-12-09 | 1997-02-04 | Discovery Communications, Inc. | Operations center with video storage for a television program packaging and delivery system |
| US5315287A (en) | 1993-01-13 | 1994-05-24 | David Sol | Energy monitoring system for recreational vehicles and marine vessels |
| DE69413585T2 (en) | 1993-03-31 | 1999-04-29 | Siemens Medical Systems, Inc., Iselin, N.J. | Apparatus and method for providing dual output signals in a telemetry transmitter |
| US5319611A (en) | 1993-03-31 | 1994-06-07 | National Research Council Of Canada | Method of determining range data in a time-of-flight ranging system |
| US5350033A (en) | 1993-04-26 | 1994-09-27 | Kraft Brett W | Robotic inspection vehicle |
| DE69317267T2 (en) | 1993-05-19 | 1998-06-25 | Alsthom Cge Alcatel | Network for video on request |
| EP0971537B1 (en) | 1993-09-20 | 2006-06-28 | Canon Kabushiki Kaisha | Video system |
| US5689641A (en)* | 1993-10-01 | 1997-11-18 | Vicor, Inc. | Multimedia collaboration system arrangement for routing compressed AV signal through a participant site without decompressing the AV signal |
| US6594688B2 (en) | 1993-10-01 | 2003-07-15 | Collaboration Properties, Inc. | Dedicated echo canceler for a workstation |
| CN1135823A (en) | 1993-10-20 | 1996-11-13 | 电视会议系统公司 | Adaptive videoconferencing system |
| US5876325A (en) | 1993-11-02 | 1999-03-02 | Olympus Optical Co., Ltd. | Surgical manipulation system |
| US5623679A (en) | 1993-11-19 | 1997-04-22 | Waverley Holdings, Inc. | System and method for creating and manipulating notes each containing multiple sub-notes, and linking the sub-notes to portions of data objects |
| US5510832A (en) | 1993-12-01 | 1996-04-23 | Medi-Vision Technologies, Inc. | Synthesized stereoscopic imaging system and method |
| US5347306A (en) | 1993-12-17 | 1994-09-13 | Mitsubishi Electric Research Laboratories, Inc. | Animated electronic meeting place |
| GB2284968A (en) | 1993-12-18 | 1995-06-21 | Ibm | Audio conferencing system |
| JP3339953B2 (en) | 1993-12-29 | 2002-10-28 | オリンパス光学工業株式会社 | Medical master-slave manipulator |
| US5511147A (en) | 1994-01-12 | 1996-04-23 | Uti Corporation | Graphical interface for robot |
| US5436542A (en) | 1994-01-28 | 1995-07-25 | Surgix, Inc. | Telescopic camera mount with remotely controlled positioning |
| JPH07213753A (en) | 1994-02-02 | 1995-08-15 | Hitachi Ltd | Personal robot equipment |
| JPH07248823A (en) | 1994-03-11 | 1995-09-26 | Hitachi Ltd | Personal robot equipment |
| DE4408329C2 (en) | 1994-03-11 | 1996-04-18 | Siemens Ag | Method for building up a cellular structured environment map of a self-moving mobile unit, which is oriented with the help of sensors based on wave reflection |
| JPH07257422A (en) | 1994-03-19 | 1995-10-09 | Hideaki Maehara | Omnidirectional drive wheel and omnidirectional traveling vehicle providing the same |
| US5659779A (en) | 1994-04-25 | 1997-08-19 | The United States Of America As Represented By The Secretary Of The Navy | System for assigning computer resources to control multiple computer directed devices |
| US5784546A (en) | 1994-05-12 | 1998-07-21 | Integrated Virtual Networks | Integrated virtual networks |
| US5734805A (en) | 1994-06-17 | 1998-03-31 | International Business Machines Corporation | Apparatus and method for controlling navigation in 3-D space |
| CA2148631C (en) | 1994-06-20 | 2000-06-13 | John J. Hildin | Voice-following video system |
| JPH0811074A (en) | 1994-06-29 | 1996-01-16 | Fanuc Ltd | Robot system |
| BE1008470A3 (en) | 1994-07-04 | 1996-05-07 | Colens Andre | Device and automatic system and equipment dedusting sol y adapted. |
| US5462051A (en) | 1994-08-31 | 1995-10-31 | Colin Corporation | Medical communication system |
| JP3302188B2 (en) | 1994-09-13 | 2002-07-15 | 日本電信電話株式会社 | Telexistence-type video phone |
| US5675229A (en) | 1994-09-21 | 1997-10-07 | Abb Robotics Inc. | Apparatus and method for adjusting robot positioning |
| US6463361B1 (en) | 1994-09-22 | 2002-10-08 | Computer Motion, Inc. | Speech interface for an automated endoscopic system |
| US5764731A (en) | 1994-10-13 | 1998-06-09 | Yablon; Jay R. | Enhanced system for transferring, storing and using signaling information in a switched telephone network |
| US5767897A (en) | 1994-10-31 | 1998-06-16 | Picturetel Corporation | Video conferencing system |
| JPH08139900A (en) | 1994-11-14 | 1996-05-31 | Canon Inc | Image communication device |
| JP2726630B2 (en) | 1994-12-07 | 1998-03-11 | インターナショナル・ビジネス・マシーンズ・コーポレイション | Gateway device and gateway method |
| US5486853A (en) | 1994-12-13 | 1996-01-23 | Picturetel Corporation | Electrical cable interface for electronic camera |
| US5553609A (en) | 1995-02-09 | 1996-09-10 | Visiting Nurse Service, Inc. | Intelligent remote visual monitoring system for home health care service |
| US5619341A (en) | 1995-02-23 | 1997-04-08 | Motorola, Inc. | Method and apparatus for preventing overflow and underflow of an encoder buffer in a video compression system |
| US5973724A (en) | 1995-02-24 | 1999-10-26 | Apple Computer, Inc. | Merging multiple teleconferences |
| US5854898A (en) | 1995-02-24 | 1998-12-29 | Apple Computer, Inc. | System for automatically adding additional data stream to existing media connection between two end points upon exchange of notifying and confirmation messages therebetween |
| US5657246A (en) | 1995-03-07 | 1997-08-12 | Vtel Corporation | Method and apparatus for a video conference user interface |
| JP2947113B2 (en) | 1995-03-09 | 1999-09-13 | 日本電気株式会社 | User interface device for image communication terminal |
| US5652849A (en) | 1995-03-16 | 1997-07-29 | Regents Of The University Of Michigan | Apparatus and method for remote control using a visual information stream |
| US5673082A (en) | 1995-04-10 | 1997-09-30 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Light-directed ranging system implementing single camera system for telerobotics applications |
| JP3241564B2 (en) | 1995-05-10 | 2001-12-25 | 富士通株式会社 | Control device and method for motion control of normal wheel type omnidirectional mobile robot |
| JPH08320727A (en) | 1995-05-24 | 1996-12-03 | Shinko Electric Co Ltd | Mobile device |
| US5630566A (en) | 1995-05-30 | 1997-05-20 | Case; Laura | Portable ergonomic work station |
| JPH08335112A (en) | 1995-06-08 | 1996-12-17 | Minolta Co Ltd | Mobile working robot system |
| US5996019A (en) | 1995-07-19 | 1999-11-30 | Fujitsu Network Communications, Inc. | Network link access scheduling using a plurality of prioritized lists containing queue identifiers |
| US5825982A (en) | 1995-09-15 | 1998-10-20 | Wright; James | Head cursor control interface for an automated endoscope system for optimal positioning |
| US6710797B1 (en) | 1995-09-20 | 2004-03-23 | Videotronic Systems | Adaptable teleconferencing eye contact terminal |
| US5961446A (en) | 1995-10-06 | 1999-10-05 | Tevital Incorporated | Patient terminal for home health care system |
| US5797515A (en) | 1995-10-18 | 1998-08-25 | Adds, Inc. | Method for controlling a drug dispensing system |
| JP3401789B2 (en) | 1995-11-13 | 2003-04-28 | ソニー株式会社 | Near video on demand system and broadcasting method thereof |
| US20010034475A1 (en) | 1995-11-13 | 2001-10-25 | Flach Terry E. | Wireless lan system with cellular architecture |
| US6219032B1 (en) | 1995-12-01 | 2001-04-17 | Immersion Corporation | Method for providing force feedback to a user of an interface device based on interactions of a controlled cursor with graphical elements in a graphical user interface |
| US5838575A (en) | 1995-12-14 | 1998-11-17 | Rx Excell Inc. | System for dispensing drugs |
| CA2240961C (en) | 1995-12-18 | 2001-06-12 | David Alan Braun | Head mounted displays linked to networked electronic panning cameras |
| US5793365A (en) | 1996-01-02 | 1998-08-11 | Sun Microsystems, Inc. | System and method providing a computer user interface enabling access to distributed workgroup members |
| US5701904A (en) | 1996-01-11 | 1997-12-30 | Krug International | Telemedicine instrumentation pack |
| US5624398A (en) | 1996-02-08 | 1997-04-29 | Symbiosis Corporation | Endoscopic robotic surgical tools and methods |
| CN1094277C (en) | 1996-03-18 | 2002-11-13 | 通用仪器公司 | Dynamic bandwidth allocation for communication network |
| US5682199A (en) | 1996-03-28 | 1997-10-28 | Jedmed Instrument Company | Video endoscope with interchangeable endoscope heads |
| JP3601737B2 (en) | 1996-03-30 | 2004-12-15 | 技術研究組合医療福祉機器研究所 | Transfer robot system |
| US5801755A (en) | 1996-04-09 | 1998-09-01 | Echerer; Scott J. | Interactive communciation system for medical treatment of remotely located patients |
| US5867653A (en) | 1996-04-18 | 1999-02-02 | International Business Machines Corporation | Method and apparatus for multi-cast based video conferencing |
| WO1997039715A1 (en) | 1996-04-25 | 1997-10-30 | Massachusetts Institute Of Technology | Human transport system with dead reckoning facilitating docking |
| AU2829697A (en) | 1996-05-06 | 1997-11-26 | Camelot Corporation, The | Videophone system |
| US6189034B1 (en) | 1996-05-08 | 2001-02-13 | Apple Computer, Inc. | Method and apparatus for dynamic launching of a teleconferencing application upon receipt of a call |
| US6006191A (en) | 1996-05-13 | 1999-12-21 | Dirienzo; Andrew L. | Remote access medical image exchange system and methods of operation therefor |
| US6496099B2 (en) | 1996-06-24 | 2002-12-17 | Computer Motion, Inc. | General purpose distributed operating room control system |
| US5949758A (en) | 1996-06-27 | 1999-09-07 | International Business Machines Corporation | Bandwidth reservation for multiple file transfer in a high speed communication network |
| JPH1079097A (en) | 1996-09-04 | 1998-03-24 | Toyota Motor Corp | Mobile communication method |
| US6195357B1 (en) | 1996-09-24 | 2001-02-27 | Intervoice Limited Partnership | Interactive information transaction processing system with universal telephony gateway capabilities |
| US5754631A (en) | 1996-09-30 | 1998-05-19 | Intervoice Limited Partnership | Voice response unit having robot conference capability on ports |
| US5974446A (en) | 1996-10-24 | 1999-10-26 | Academy Of Applied Science | Internet based distance learning system for communicating between server and clients wherein clients communicate with each other or with teacher using different communication techniques via common user interface |
| US6646677B2 (en) | 1996-10-25 | 2003-11-11 | Canon Kabushiki Kaisha | Image sensing control method and apparatus, image transmission control method, apparatus, and system, and storage means storing program that implements the method |
| US5917958A (en) | 1996-10-31 | 1999-06-29 | Sensormatic Electronics Corporation | Distributed video data base with remote searching for image data features |
| US5867494A (en) | 1996-11-18 | 1999-02-02 | Mci Communication Corporation | System, method and article of manufacture with integrated video conferencing billing in a communication system architecture |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US8182469B2 (en) | 1997-11-21 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Surgical accessory clamp and method |
| US6113343A (en) | 1996-12-16 | 2000-09-05 | Goldenberg; Andrew | Explosives disposal robot |
| US6148100A (en) | 1996-12-20 | 2000-11-14 | Bechtel Bwxt Idaho, Llc | 3-dimensional telepresence system for a robotic environment |
| US5886735A (en) | 1997-01-14 | 1999-03-23 | Bullister; Edward T | Video telephone headset |
| US5927423A (en) | 1997-03-05 | 1999-07-27 | Massachusetts Institute Of Technology | Reconfigurable footprint mechanism for omnidirectional vehicles |
| US6501740B1 (en) | 1997-03-07 | 2002-12-31 | At&T Corp. | System and method for teleconferencing on an internetwork comprising connection-oriented and connectionless networks |
| US5995884A (en) | 1997-03-07 | 1999-11-30 | Allen; Timothy P. | Computer peripheral floor cleaning system and navigation method |
| WO1998042407A1 (en) | 1997-03-27 | 1998-10-01 | Medtronic, Inc. | Concepts to implement medconnect |
| JPH10288689A (en) | 1997-04-14 | 1998-10-27 | Hitachi Ltd | Remote monitoring system |
| US20040157612A1 (en) | 1997-04-25 | 2004-08-12 | Minerva Industries, Inc. | Mobile communication and stethoscope system |
| JP2001524286A (en) | 1997-05-07 | 2001-11-27 | テルボティクス・インク | Teleconference robot with swiveling video monitor |
| US6914622B1 (en) | 1997-05-07 | 2005-07-05 | Telbotics Inc. | Teleconferencing robot with swiveling video monitor |
| GB2325376B (en) | 1997-05-14 | 2001-09-19 | Dsc Telecom Lp | Allocation of bandwidth to calls in a wireless telecommunications system |
| US5857534A (en) | 1997-06-05 | 1999-01-12 | Kansas State University Research Foundation | Robotic inspection apparatus and method |
| US5995119A (en) | 1997-06-06 | 1999-11-30 | At&T Corp. | Method for generating photo-realistic animated characters |
| US6474434B1 (en) | 1997-07-02 | 2002-11-05 | Borringis Industrie Ag | Drive wheel |
| US6330486B1 (en) | 1997-07-16 | 2001-12-11 | Silicon Graphics, Inc. | Acoustic perspective in a virtual three-dimensional environment |
| US6445964B1 (en) | 1997-08-04 | 2002-09-03 | Harris Corporation | Virtual reality simulation-based training of telekinegenesis system for training sequential kinematic behavior of automated kinematic machine |
| JPH11126017A (en) | 1997-08-22 | 1999-05-11 | Sony Corp | Storage medium, robot, information processing device and electronic pet system |
| JP2001515236A (en) | 1997-09-04 | 2001-09-18 | ダイナログ インコーポレイテッド | Method for calibrating a robot inspection system |
| US6714839B2 (en) | 1998-12-08 | 2004-03-30 | Intuitive Surgical, Inc. | Master having redundant degrees of freedom |
| US6400378B1 (en) | 1997-09-26 | 2002-06-04 | Sony Corporation | Home movie maker |
| JPH11175118A (en) | 1997-10-08 | 1999-07-02 | Denso Corp | Robot controller |
| US7956894B2 (en) | 1997-10-14 | 2011-06-07 | William Rex Akers | Apparatus and method for computerized multi-media medical and pharmaceutical data organization and transmission |
| US7885822B2 (en) | 2001-05-09 | 2011-02-08 | William Rex Akers | System and method for electronic medical file management |
| US6597392B1 (en) | 1997-10-14 | 2003-07-22 | Healthcare Vision, Inc. | Apparatus and method for computerized multi-media data organization and transmission |
| US6209018B1 (en) | 1997-11-13 | 2001-03-27 | Sun Microsystems, Inc. | Service framework for a distributed object network system |
| DE69821659T2 (en) | 1997-11-27 | 2004-12-16 | Solar And Robotics S.A. | cleaning robot |
| US6532404B2 (en) | 1997-11-27 | 2003-03-11 | Colens Andre | Mobile robots and their control system |
| JP3919040B2 (en) | 1997-11-30 | 2007-05-23 | ソニー株式会社 | Robot equipment |
| US6036812A (en) | 1997-12-05 | 2000-03-14 | Automated Prescription Systems, Inc. | Pill dispensing system |
| US6006946A (en) | 1997-12-05 | 1999-12-28 | Automated Prescriptions System, Inc. | Pill dispensing system |
| AU1827699A (en) | 1997-12-16 | 1999-07-05 | Board Of Trustees Of Michigan State University | Spherical mobile robot |
| US6047259A (en) | 1997-12-30 | 2000-04-04 | Medical Management International, Inc. | Interactive method and system for managing physical exams, diagnosis and treatment protocols in a health care practice |
| US5983263A (en) | 1998-01-02 | 1999-11-09 | Intel Corporation | Method and apparatus for transmitting images during a multimedia teleconference |
| US6563533B1 (en) | 1998-01-06 | 2003-05-13 | Sony Corporation | Ergonomically designed apparatus for selectively actuating remote robotics cameras |
| US6380968B1 (en) | 1998-01-06 | 2002-04-30 | Intel Corporation | Method and apparatus for controlling a remote video camera in a video conferencing system |
| DE19803494A1 (en) | 1998-01-29 | 1999-08-05 | Berchtold Gmbh & Co Geb | Procedure for manipulating an operating light |
| JPH11220706A (en) | 1998-02-03 | 1999-08-10 | Nikon Corp | Video phone system |
| JPH11249725A (en) | 1998-02-26 | 1999-09-17 | Fanuc Ltd | Robot controller |
| US6346962B1 (en) | 1998-02-27 | 2002-02-12 | International Business Machines Corporation | Control of video conferencing system with pointing device |
| US6373855B1 (en) | 1998-03-05 | 2002-04-16 | Intel Corporation | System and method for using audio performance to control video bandwidth |
| US6643496B1 (en) | 1998-03-31 | 2003-11-04 | Canon Kabushiki Kaisha | System, method, and apparatus for adjusting packet transmission rates based on dynamic evaluation of network characteristics |
| GB9807540D0 (en) | 1998-04-09 | 1998-06-10 | Orad Hi Tec Systems Ltd | Tracking system for sports |
| US6650748B1 (en) | 1998-04-13 | 2003-11-18 | Avaya Technology Corp. | Multiple call handling in a call center |
| US6233504B1 (en) | 1998-04-16 | 2001-05-15 | California Institute Of Technology | Tool actuation and force feedback on robot-assisted microsurgery system |
| US6529765B1 (en) | 1998-04-21 | 2003-03-04 | Neutar L.L.C. | Instrumented and actuated guidance fixture for sterotactic surgery |
| US20020151514A1 (en) | 1998-05-11 | 2002-10-17 | Paz Einat | Genes associated with mechanical stress, expression products therefrom, and uses thereof |
| US6219587B1 (en) | 1998-05-27 | 2001-04-17 | Nextrx Corporation | Automated pharmaceutical management and dispensing system |
| US6250928B1 (en) | 1998-06-22 | 2001-06-26 | Massachusetts Institute Of Technology | Talking facial display method and apparatus |
| CN1146491C (en) | 1998-06-23 | 2004-04-21 | 索尼公司 | Robotic device and information processing system |
| JP3792901B2 (en) | 1998-07-08 | 2006-07-05 | キヤノン株式会社 | Camera control system and control method thereof |
| US6452915B1 (en) | 1998-07-10 | 2002-09-17 | Malibu Networks, Inc. | IP-flow classification in a wireless point to multi-point (PTMP) transmission system |
| US6266577B1 (en) | 1998-07-13 | 2001-07-24 | Gte Internetworking Incorporated | System for dynamically reconfigure wireless robot network |
| JP3487186B2 (en) | 1998-07-28 | 2004-01-13 | 日本ビクター株式会社 | Network remote control system |
| JP4100773B2 (en) | 1998-09-04 | 2008-06-11 | 富士通株式会社 | Robot remote control method and system |
| JP2000153476A (en) | 1998-09-14 | 2000-06-06 | Honda Motor Co Ltd | Legged mobile robot |
| US6594527B2 (en) | 1998-09-18 | 2003-07-15 | Nexmed Holdings, Inc. | Electrical stimulation apparatus and method |
| US6175779B1 (en) | 1998-09-29 | 2001-01-16 | J. Todd Barrett | Computerized unit dose medication dispensing cart |
| US6457043B1 (en) | 1998-10-23 | 2002-09-24 | Verizon Laboratories Inc. | Speaker identifier for multi-party conference |
| AU1216200A (en) | 1998-10-24 | 2000-05-15 | Vtel Corporation | Graphical menu items for a user interface menu of a video teleconferencing system |
| US6602469B1 (en) | 1998-11-09 | 2003-08-05 | Lifestream Technologies, Inc. | Health monitoring and diagnostic device and network-based health assessment and medical records maintenance system |
| US6468265B1 (en) | 1998-11-20 | 2002-10-22 | Intuitive Surgical, Inc. | Performing cardiac surgery without cardioplegia |
| US6951535B2 (en) | 2002-01-16 | 2005-10-04 | Intuitive Surgical, Inc. | Tele-medicine system that transmits an entire state of a subsystem |
| US8527094B2 (en) | 1998-11-20 | 2013-09-03 | Intuitive Surgical Operations, Inc. | Multi-user medical robotic system for collaboration or training in minimally invasive surgical procedures |
| US6852107B2 (en) | 2002-01-16 | 2005-02-08 | Computer Motion, Inc. | Minimally invasive surgical training using robotics and tele-collaboration |
| US6232735B1 (en) | 1998-11-24 | 2001-05-15 | Thames Co., Ltd. | Robot remote control system and robot image remote control processing system |
| JP2000196876A (en) | 1998-12-28 | 2000-07-14 | Canon Inc | Image processing system, image forming control device, image forming device, method of controlling image processing system, method of controlling image forming control device, and method of controlling image forming device |
| US6170929B1 (en) | 1998-12-02 | 2001-01-09 | Ronald H. Wilson | Automated medication-dispensing cart |
| US6535182B2 (en) | 1998-12-07 | 2003-03-18 | Koninklijke Philips Electronics N.V. | Head-mounted projection display system |
| US6522906B1 (en) | 1998-12-08 | 2003-02-18 | Intuitive Surgical, Inc. | Devices and methods for presenting and regulating auxiliary information on an image display of a telesurgical system to assist an operator in performing a surgical procedure |
| ATE460127T1 (en) | 1998-12-08 | 2010-03-15 | Intuitive Surgical Inc | TELEROBOT FOR MOVING PICTURES |
| US6799065B1 (en) | 1998-12-08 | 2004-09-28 | Intuitive Surgical, Inc. | Image shifting apparatus and method for a telerobotic system |
| JP3980205B2 (en) | 1998-12-17 | 2007-09-26 | コニカミノルタホールディングス株式会社 | Work robot |
| JP3545958B2 (en) | 1998-12-22 | 2004-07-21 | 京セラ株式会社 | Solid oxide fuel cell |
| US6259956B1 (en) | 1999-01-14 | 2001-07-10 | Rawl & Winstead, Inc. | Method and apparatus for site management |
| US6463352B1 (en) | 1999-01-21 | 2002-10-08 | Amada Cutting Technologies, Inc. | System for management of cutting machines |
| JP4366617B2 (en) | 1999-01-25 | 2009-11-18 | ソニー株式会社 | Robot device |
| JP3508831B2 (en) | 1999-02-15 | 2004-03-22 | 横河電機株式会社 | Reference voltage generation circuit |
| US6338013B1 (en) | 1999-03-19 | 2002-01-08 | Bryan John Ruffner | Multifunctional mobile appliance |
| JP2002541563A (en) | 1999-04-01 | 2002-12-03 | アシスト メディカル システムズ, インコーポレイテッド | System and method for integrated medical information management and medical device control |
| US7007235B1 (en)* | 1999-04-02 | 2006-02-28 | Massachusetts Institute Of Technology | Collaborative agent interaction control and synchronization system |
| US6424885B1 (en) | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US6594552B1 (en) | 1999-04-07 | 2003-07-15 | Intuitive Surgical, Inc. | Grip strength with tactile feedback for robotic surgery |
| US6788651B1 (en) | 1999-04-21 | 2004-09-07 | Mindspeed Technologies, Inc. | Methods and apparatus for data communications on packet networks |
| US6781606B2 (en) | 1999-05-20 | 2004-08-24 | Hewlett-Packard Development Company, L.P. | System and method for displaying images using foveal video |
| US6292713B1 (en) | 1999-05-20 | 2001-09-18 | Compaq Computer Corporation | Robotic telepresence system |
| US6346950B1 (en) | 1999-05-20 | 2002-02-12 | Compaq Computer Corporation | System and method for display images using anamorphic video |
| US6523629B1 (en) | 1999-06-07 | 2003-02-25 | Sandia Corporation | Tandem mobile robot system |
| US7256708B2 (en) | 1999-06-23 | 2007-08-14 | Visicu, Inc. | Telecommunications network for remote patient monitoring |
| US6804656B1 (en) | 1999-06-23 | 2004-10-12 | Visicu, Inc. | System and method for providing continuous, expert network critical care services from a remote location(s) |
| US6304050B1 (en) | 1999-07-19 | 2001-10-16 | Steven B. Skaar | Means and method of robot control relative to an arbitrary surface using camera-space manipulation |
| US7606164B2 (en) | 1999-12-14 | 2009-10-20 | Texas Instruments Incorporated | Process of increasing source rate on acceptable side of threshold |
| US6540039B1 (en) | 1999-08-19 | 2003-04-01 | Massachusetts Institute Of Technology | Omnidirectional vehicle with offset wheel pairs |
| DE69927590T2 (en) | 1999-08-31 | 2006-07-06 | Swisscom Ag | Mobile robot and control method for a mobile robot |
| US6810411B1 (en) | 1999-09-13 | 2004-10-26 | Intel Corporation | Method and system for selecting a host in a communications network |
| DE60035651T2 (en) | 1999-09-16 | 2008-05-21 | Fanuc Ltd. | Control system for the synchronous cooperative operation of a plurality of robots |
| JP2001094989A (en) | 1999-09-20 | 2001-04-06 | Toshiba Corp | Moving image transmitting device and moving image communication device |
| US6480762B1 (en) | 1999-09-27 | 2002-11-12 | Olympus Optical Co., Ltd. | Medical apparatus supporting system |
| US6449762B1 (en) | 1999-10-07 | 2002-09-10 | Synplicity, Inc. | Maintaining correspondence between text and schematic representations of circuit elements in circuit synthesis |
| US6798753B1 (en) | 1999-10-14 | 2004-09-28 | International Business Machines Corporation | Automatically establishing conferences from desktop applications over the Internet |
| US7467211B1 (en) | 1999-10-18 | 2008-12-16 | Cisco Technology Inc. | Remote computer system management through an FTP internet connection |
| US7739383B1 (en) | 1999-10-22 | 2010-06-15 | Nomadix, Inc. | Systems and methods for dynamic bandwidth management on a per subscriber basis in a communications network |
| JP4207336B2 (en) | 1999-10-29 | 2009-01-14 | ソニー株式会社 | Charging system for mobile robot, method for searching for charging station, mobile robot, connector, and electrical connection structure |
| AT409238B (en) | 1999-11-05 | 2002-06-25 | Fronius Schweissmasch Prod | DETERMINING AND / OR DETERMINING USER AUTHORIZATIONS BY MEANS OF A TRANSPONDER, A FINGERPRINT IDENTIFIER OR THE LIKE |
| JP2001134309A (en) | 1999-11-09 | 2001-05-18 | Mitsubishi Electric Corp | Robot operation terminal and robot remote control system |
| JP2001142512A (en) | 1999-11-16 | 2001-05-25 | Mitsubishi Electric Corp | Robot remote control system |
| AU1775401A (en) | 1999-11-18 | 2001-05-30 | Procter & Gamble Company, The | Home cleaning robot |
| JP2001147718A (en) | 1999-11-19 | 2001-05-29 | Sony Corp | Information communication robot device, information communication method and information communication robot system |
| US6374155B1 (en) | 1999-11-24 | 2002-04-16 | Personal Robotics, Inc. | Autonomous multi-platform robot system |
| US6443359B1 (en) | 1999-12-03 | 2002-09-03 | Diebold, Incorporated | Automated transaction system and method |
| US7156809B2 (en) | 1999-12-17 | 2007-01-02 | Q-Tec Systems Llc | Method and apparatus for health and disease management combining patient data monitoring with wireless internet connectivity |
| US20010051881A1 (en) | 1999-12-22 | 2001-12-13 | Aaron G. Filler | System, method and article of manufacture for managing a medical services network |
| DE60028815T2 (en) | 1999-12-23 | 2006-10-05 | Hill-Rom Services, Inc., Wilmington | OPERATING ROOM SYSTEM |
| JP2001179663A (en) | 1999-12-24 | 2001-07-03 | Sony Corp | Leg type mobile robot, its control method and charging station |
| JP2001188124A (en) | 1999-12-27 | 2001-07-10 | Ge Toshiba Silicones Co Ltd | Saponified cellulose acetate composite polarizing substrate, method for producing the same, and liquid crystal display device |
| US7389252B2 (en) | 2000-01-06 | 2008-06-17 | Anne E. Robb | Recursive method and system for accessing classification information |
| JP3791663B2 (en) | 2000-01-17 | 2006-06-28 | 富士電機ホールディングス株式会社 | Omnidirectional moving vehicle and its control method |
| JP2001198868A (en) | 2000-01-17 | 2001-07-24 | Atr Media Integration & Communications Res Lab | Robot for cyber two man comic dialogue and support device |
| JP2001198865A (en) | 2000-01-20 | 2001-07-24 | Toshiba Corp | Biped robot device and its operation method |
| JP2001222309A (en) | 2000-02-10 | 2001-08-17 | Yaskawa Electric Corp | Robot controller |
| JP2001252884A (en) | 2000-03-06 | 2001-09-18 | Matsushita Electric Ind Co Ltd | Robot, robot system and robot control method |
| US20010054071A1 (en) | 2000-03-10 | 2001-12-20 | Loeb Gerald E. | Audio/video conference system for electronic caregiving |
| FR2806561B1 (en) | 2000-03-16 | 2002-08-09 | France Telecom | HOME TELE ASSISTANCE SYSTEM |
| US6369847B1 (en) | 2000-03-17 | 2002-04-09 | Emtel, Inc. | Emergency facility video-conferencing system |
| KR100351816B1 (en) | 2000-03-24 | 2002-09-11 | 엘지전자 주식회사 | Apparatus for conversing format |
| US20010048464A1 (en) | 2000-04-07 | 2001-12-06 | Barnett Howard S. | Portable videoconferencing system |
| US6590604B1 (en) | 2000-04-07 | 2003-07-08 | Polycom, Inc. | Personal videoconferencing system having distributed processing architecture |
| JP3511088B2 (en) | 2000-04-10 | 2004-03-29 | 独立行政法人航空宇宙技術研究所 | Pressure distribution sensor for multi-joint care robot control |
| US6845297B2 (en) | 2000-05-01 | 2005-01-18 | Irobot Corporation | Method and system for remote control of mobile robot |
| JP5306566B2 (en) | 2000-05-01 | 2013-10-02 | アイロボット コーポレーション | Method and system for remotely controlling a mobile robot |
| US6292714B1 (en) | 2000-05-12 | 2001-09-18 | Fujitsu Limited | Robot cooperation device, and robot cooperation program storage medium |
| EP1364302A2 (en) | 2000-05-24 | 2003-11-26 | Virtual Clinic, Inc. | Method and apparatus for providing personalized services |
| DE60141403D1 (en) | 2000-06-09 | 2010-04-08 | Japan Science & Tech Agency | Hearing device for a robot |
| JP2001353678A (en) | 2000-06-12 | 2001-12-25 | Sony Corp | Authoring system and method and storage medium |
| JP3513084B2 (en) | 2000-06-14 | 2004-03-31 | 株式会社東芝 | Information processing system, information equipment and information processing method |
| JP2002000574A (en) | 2000-06-22 | 2002-01-08 | Matsushita Electric Ind Co Ltd | Nursing support robot and nursing support system |
| US7782363B2 (en) | 2000-06-27 | 2010-08-24 | Front Row Technologies, Llc | Providing multiple video perspectives of activities through a data network to a remote multimedia server for selective display by remote viewing audiences |
| US6629028B2 (en) | 2000-06-29 | 2003-09-30 | Riken | Method and system of optical guidance of mobile body |
| US6746443B1 (en) | 2000-07-27 | 2004-06-08 | Intuitive Surgical Inc. | Roll-pitch-roll surgical tool |
| US8751248B2 (en) | 2000-07-28 | 2014-06-10 | Visual Telecommunications Network, Inc. | Method, apparatus, and medium using a master control file for computer software interoperability between disparate operating systems |
| US7886054B1 (en)* | 2000-10-11 | 2011-02-08 | Siddhartha Nag | Graphical user interface (GUI) for administering a network implementing media aggregation |
| AU2001278953A1 (en) | 2000-07-28 | 2002-02-13 | American Calcar, Inc. | Technique for effective organization and communication of information |
| US6738076B1 (en) | 2000-07-31 | 2004-05-18 | Hewlett-Packard Development Company, L.P. | Method and system for maintaining persistance of graphical markups in a collaborative graphical viewing system |
| JP2002046088A (en) | 2000-08-03 | 2002-02-12 | Matsushita Electric Ind Co Ltd | Robot device |
| US20020027597A1 (en) | 2000-09-05 | 2002-03-07 | John Sachau | System for mobile videoconferencing |
| US20070273751A1 (en) | 2000-09-05 | 2007-11-29 | Sachau John A | System and methods for mobile videoconferencing |
| EP1189169A1 (en) | 2000-09-07 | 2002-03-20 | STMicroelectronics S.r.l. | A VLSI architecture, particularly for motion estimation applications |
| AU2001289056A1 (en) | 2000-09-11 | 2002-03-26 | Pinotage, Llc | System and method for obtaining and utilizing maintenance information |
| KR100373323B1 (en) | 2000-09-19 | 2003-02-25 | 한국전자통신연구원 | Method of multipoint video conference in video conferencing system |
| US6741911B2 (en) | 2000-09-20 | 2004-05-25 | John Castle Simmons | Natural robot control |
| JP2002101333A (en) | 2000-09-26 | 2002-04-05 | Casio Comput Co Ltd | REMOTE CONTROL DEVICE, REMOTE OPERATION SERVICE SYSTEM, AND PROGRAM RECORDING MEDIUM THEREOF |
| US6748343B2 (en) | 2000-09-28 | 2004-06-08 | Vigilos, Inc. | Method and process for configuring a premises for monitoring |
| US20030060808A1 (en) | 2000-10-04 | 2003-03-27 | Wilk Peter J. | Telemedical method and system |
| US20020082498A1 (en) | 2000-10-05 | 2002-06-27 | Siemens Corporate Research, Inc. | Intra-operative image-guided neurosurgery with augmented reality visualization |
| US6674259B1 (en) | 2000-10-06 | 2004-01-06 | Innovation First, Inc. | System and method for managing and controlling a robot competition |
| US20050149364A1 (en) | 2000-10-06 | 2005-07-07 | Ombrellaro Mark P. | Multifunction telemedicine software with integrated electronic medical record |
| JP2002112970A (en) | 2000-10-10 | 2002-04-16 | Daito Seiki Co Ltd | Device and method for observing surface of skin |
| JP2002113675A (en) | 2000-10-11 | 2002-04-16 | Sony Corp | Robot control system and introducing method for robot controlling software |
| US7257832B2 (en) | 2000-10-16 | 2007-08-14 | Heartlab, Inc. | Medical image capture system and method |
| US8348675B2 (en) | 2000-10-19 | 2013-01-08 | Life Success Academy | Apparatus and method for delivery of instructional information |
| US6636780B1 (en) | 2000-11-07 | 2003-10-21 | Mdg Medical Inc. | Medication dispensing system including medicine cabinet and tray therefor |
| JP4310916B2 (en) | 2000-11-08 | 2009-08-12 | コニカミノルタホールディングス株式会社 | Video display device |
| US7219364B2 (en) | 2000-11-22 | 2007-05-15 | International Business Machines Corporation | System and method for selectable semantic codec pairs for very low data-rate video transmission |
| WO2002045434A1 (en) | 2000-12-01 | 2002-06-06 | Vigilos, Inc. | System and method for processing video data utilizing motion detection and subdivided video fields |
| US6543899B2 (en) | 2000-12-05 | 2003-04-08 | Eastman Kodak Company | Auto-stereoscopic viewing system using mounted projection |
| US7370074B2 (en) | 2000-12-06 | 2008-05-06 | Vigilos, Inc. | System and method for implementing open-protocol remote device control |
| US6411209B1 (en) | 2000-12-06 | 2002-06-25 | Koninklijke Philips Electronics N.V. | Method and apparatus to select the best video frame to transmit to a remote station for CCTV based residential security monitoring |
| US6791550B2 (en) | 2000-12-12 | 2004-09-14 | Enounce, Inc. | Management of presentation time in a digital media presentation system with variable rate presentation capability |
| US20040260790A1 (en) | 2000-12-21 | 2004-12-23 | Ge Medical System Global Technology Company, Llc | Method and apparatus for remote or collaborative control of an imaging system |
| US7339605B2 (en) | 2004-04-16 | 2008-03-04 | Polycom, Inc. | Conference link between a speakerphone and a video conference unit |
| US6442451B1 (en) | 2000-12-28 | 2002-08-27 | Robotic Workspace Technologies, Inc. | Versatile robot control system |
| US20020085030A1 (en)* | 2000-12-29 | 2002-07-04 | Jamal Ghani | Graphical user interface for an interactive collaboration system |
| KR20020061961A (en) | 2001-01-19 | 2002-07-25 | 사성동 | Intelligent pet robot |
| JP2002342759A (en) | 2001-01-30 | 2002-11-29 | Nec Corp | System and method for providing information and its program |
| US20020106998A1 (en) | 2001-02-05 | 2002-08-08 | Presley Herbert L. | Wireless rich media conferencing |
| JP3736358B2 (en) | 2001-02-08 | 2006-01-18 | 株式会社チューオー | Wall material |
| JP4182464B2 (en) | 2001-02-09 | 2008-11-19 | 富士フイルム株式会社 | Video conferencing system |
| US20020109775A1 (en) | 2001-02-09 | 2002-08-15 | Excellon Automation Co. | Back-lighted fiducial recognition system and method of use |
| US7184559B2 (en) | 2001-02-23 | 2007-02-27 | Hewlett-Packard Development Company, L.P. | System and method for audio telepresence |
| JP2005500912A (en) | 2001-02-27 | 2005-01-13 | アンソロトロニックス インコーポレイテッド | Robot apparatus and wireless communication system |
| US20020128985A1 (en) | 2001-03-09 | 2002-09-12 | Brad Greenwald | Vehicle value appraisal system |
| US20020133062A1 (en) | 2001-03-15 | 2002-09-19 | Arling Robert Stanley | Embedded measurement values in medical reports |
| JP4739556B2 (en) | 2001-03-27 | 2011-08-03 | 株式会社安川電機 | Remote adjustment and abnormality judgment device for control target |
| US6965394B2 (en) | 2001-03-30 | 2005-11-15 | Koninklijke Philips Electronics N.V. | Remote camera control device |
| US20020143923A1 (en) | 2001-04-03 | 2002-10-03 | Vigilos, Inc. | System and method for managing a device network |
| JP2002305743A (en) | 2001-04-04 | 2002-10-18 | Rita Security Engineering:Kk | Remote moving picture transmission system compatible with adsl |
| US6920373B2 (en) | 2001-04-13 | 2005-07-19 | Board Of Trusstees Operating Michigan State University | Synchronization and task control of real-time internet based super-media |
| US20030199000A1 (en) | 2001-08-20 | 2003-10-23 | Valkirs Gunars E. | Diagnostic markers of stroke and cerebral injury and methods of use thereof |
| KR100437372B1 (en) | 2001-04-18 | 2004-06-25 | 삼성광주전자 주식회사 | Robot cleaning System using by mobile communication network |
| AU767561B2 (en) | 2001-04-18 | 2003-11-13 | Samsung Kwangju Electronics Co., Ltd. | Robot cleaner, system employing the same and method for reconnecting to external recharging device |
| JP2002321180A (en) | 2001-04-24 | 2002-11-05 | Matsushita Electric Ind Co Ltd | Robot control system |
| WO2002088979A1 (en) | 2001-05-02 | 2002-11-07 | Bitstream Inc. | Methods and systems for displaying media in scaled manner and/or in orientation |
| US7202851B2 (en) | 2001-05-04 | 2007-04-10 | Immersion Medical Inc. | Haptic interface for palpation simulation |
| US6723086B2 (en) | 2001-05-07 | 2004-04-20 | Logiq Wireless Solutions, Inc. | Remote controlled transdermal medication delivery device |
| US7242306B2 (en) | 2001-05-08 | 2007-07-10 | Hill-Rom Services, Inc. | Article locating and tracking apparatus and method |
| JP2004536634A (en) | 2001-05-25 | 2004-12-09 | レゴ エー/エス | Robot toy programming |
| JP2002354551A (en) | 2001-05-25 | 2002-12-06 | Mitsubishi Heavy Ind Ltd | Robot service providing method and system thereof |
| JP2002352354A (en) | 2001-05-30 | 2002-12-06 | Denso Corp | Remote care method |
| JP2002355779A (en) | 2001-06-01 | 2002-12-10 | Sharp Corp | Robot type interface device and control method therefor |
| US6763282B2 (en) | 2001-06-04 | 2004-07-13 | Time Domain Corp. | Method and system for controlling a robot |
| US20020186243A1 (en) | 2001-06-06 | 2002-12-12 | Robert Ellis | Method and system for providing combined video and physiological data over a communication network for patient monitoring |
| US6507773B2 (en) | 2001-06-14 | 2003-01-14 | Sharper Image Corporation | Multi-functional robot with remote and video system |
| US6995664B1 (en) | 2001-06-20 | 2006-02-07 | Jeffrey Darling | Remote supervision system and method |
| US6604021B2 (en) | 2001-06-21 | 2003-08-05 | Advanced Telecommunications Research Institute International | Communication robot |
| US6993378B2 (en) | 2001-06-25 | 2006-01-31 | Science Applications International Corporation | Identification by analysis of physiometric variation |
| US7483867B2 (en) | 2001-06-26 | 2009-01-27 | Intuition Intelligence, Inc. | Processing device with intuitive learning capability |
| GB2377117B (en) | 2001-06-27 | 2004-08-18 | Cambridge Broadband Ltd | Method and apparatus for providing communications bandwidth |
| NO20013450L (en) | 2001-07-11 | 2003-01-13 | Simsurgery As | Systems and methods for interactive training of procedures |
| GB2393350B (en) | 2001-07-25 | 2006-03-08 | Neil J Stevenson | A camera control apparatus and method |
| US7831575B2 (en) | 2001-08-02 | 2010-11-09 | Bridge Works, Ltd | Library virtualisation module |
| US6667592B2 (en) | 2001-08-13 | 2003-12-23 | Intellibot, L.L.C. | Mapped robot system |
| US6580246B2 (en) | 2001-08-13 | 2003-06-17 | Steven Jacobs | Robot touch shield |
| JP4689107B2 (en) | 2001-08-22 | 2011-05-25 | 本田技研工業株式会社 | Autonomous robot |
| US6952470B1 (en) | 2001-08-23 | 2005-10-04 | Bellsouth Intellectual Property Corp. | Apparatus and method for managing a call center |
| WO2003019450A2 (en) | 2001-08-24 | 2003-03-06 | March Networks Corporation | Remote health-monitoring system and method |
| JP2003070804A (en) | 2001-09-05 | 2003-03-11 | Olympus Optical Co Ltd | Remote medical support system |
| US6728599B2 (en) | 2001-09-07 | 2004-04-27 | Computer Motion, Inc. | Modularity system for computer assisted surgery |
| JP4378072B2 (en) | 2001-09-07 | 2009-12-02 | キヤノン株式会社 | Electronic device, imaging device, portable communication device, video display control method and program |
| JP2005526528A (en) | 2001-09-13 | 2005-09-08 | ザ・ボーイング・カンパニー | How to send important health statistics from aircraft to remote locations |
| US6587750B2 (en) | 2001-09-25 | 2003-07-01 | Intuitive Surgical, Inc. | Removable infinite roll master grip handle and touch sensor for robotic surgery |
| JP2003110652A (en) | 2001-10-01 | 2003-04-11 | Matsushita Graphic Communication Systems Inc | Method of reinitializing adsl modem and the adsl modem |
| US6840904B2 (en) | 2001-10-11 | 2005-01-11 | Jason Goldberg | Medical monitoring device and system |
| US7058689B2 (en) | 2001-10-16 | 2006-06-06 | Sprint Communications Company L.P. | Sharing of still images within a video telephony call |
| US7307653B2 (en) | 2001-10-19 | 2007-12-11 | Nokia Corporation | Image stabilizer for a microcamera module of a handheld device, and method for stabilizing a microcamera module of a handheld device |
| WO2003036557A1 (en) | 2001-10-22 | 2003-05-01 | Intel Zao | Method and apparatus for background segmentation based on motion localization |
| US20030080901A1 (en) | 2001-10-25 | 2003-05-01 | Koninklijke Philips Electronics N.V. | RFID navigation system |
| JP2003136450A (en) | 2001-10-26 | 2003-05-14 | Communication Research Laboratory | Remote control system of robot arm by providing audio information |
| JP2003205483A (en) | 2001-11-07 | 2003-07-22 | Sony Corp | Robot system and control method for robot device |
| US20030152145A1 (en) | 2001-11-15 | 2003-08-14 | Kevin Kawakita | Crash prevention recorder (CPR)/video-flight data recorder (V-FDR)/cockpit-cabin voice recorder for light aircraft with an add-on option for large commercial jets |
| US7317685B1 (en) | 2001-11-26 | 2008-01-08 | Polycom, Inc. | System and method for dynamic bandwidth allocation for videoconferencing in lossy packet switched networks |
| US6785589B2 (en) | 2001-11-30 | 2004-08-31 | Mckesson Automation, Inc. | Dispensing cabinet with unit dose dispensing drawer |
| US20050101841A9 (en) | 2001-12-04 | 2005-05-12 | Kimberly-Clark Worldwide, Inc. | Healthcare networks with biosensors |
| US7539504B2 (en) | 2001-12-05 | 2009-05-26 | Espre Solutions, Inc. | Wireless telepresence collaboration system |
| US6839612B2 (en) | 2001-12-07 | 2005-01-04 | Institute Surgical, Inc. | Microwrist system for surgical procedures |
| JP3709393B2 (en) | 2001-12-14 | 2005-10-26 | 富士ソフトエービーシ株式会社 | Remote control system and remote control method |
| US7227864B2 (en) | 2001-12-17 | 2007-06-05 | Microsoft Corporation | Methods and systems for establishing communications through firewalls and network address translators |
| US7305114B2 (en) | 2001-12-26 | 2007-12-04 | Cognex Technology And Investment Corporation | Human/machine interface for a machine vision sensor and method for installing and operating the same |
| US7082497B2 (en) | 2001-12-28 | 2006-07-25 | Hewlett-Packard Development Company, L.P. | System and method for managing a moveable media library with library partitions |
| US7647320B2 (en) | 2002-01-18 | 2010-01-12 | Peoplechart Corporation | Patient directed system and method for managing medical information |
| US7167448B2 (en) | 2002-02-04 | 2007-01-23 | Sun Microsystems, Inc. | Prioritization of remote services messages within a low bandwidth environment |
| US6693585B1 (en) | 2002-02-07 | 2004-02-17 | Aradiant Corporation | Self-contained selectively activated mobile object position reporting device with reduced power consumption and minimized wireless service fees. |
| US20060005267A1 (en)* | 2002-02-08 | 2006-01-05 | Steven Gutteridge | Peptide deformylase |
| US6784916B2 (en) | 2002-02-11 | 2004-08-31 | Telbotics Inc. | Video conferencing apparatus |
| WO2003068461A1 (en) | 2002-02-13 | 2003-08-21 | Toudai Tlo, Ltd. | Robot-phone |
| JP2003241807A (en) | 2002-02-19 | 2003-08-29 | Yaskawa Electric Corp | Robot controller |
| JP4100934B2 (en) | 2002-02-28 | 2008-06-11 | シャープ株式会社 | Composite camera system, zoom camera control method, and zoom camera control program |
| TW200304608A (en) | 2002-03-06 | 2003-10-01 | Z Kat Inc | System and method for using a haptic device in combination with a computer-assisted surgery system |
| US7860680B2 (en) | 2002-03-07 | 2010-12-28 | Microstrain, Inc. | Robotic system for powering and interrogating sensors |
| US6915871B2 (en) | 2002-03-12 | 2005-07-12 | Dan Gavish | Method and apparatus for improving child safety and adult convenience while using a mobile ride-on toy |
| US6769771B2 (en) | 2002-03-14 | 2004-08-03 | Entertainment Design Workshop, Llc | Method and apparatus for producing dynamic imagery in a visual medium |
| JP3945279B2 (en) | 2002-03-15 | 2007-07-18 | ソニー株式会社 | Obstacle recognition apparatus, obstacle recognition method, obstacle recognition program, and mobile robot apparatus |
| AU2002242928A1 (en) | 2002-03-18 | 2003-09-29 | Medic4All Ag | Monitoring method and monitoring system for assessing physiological parameters of a subject |
| KR100483790B1 (en) | 2002-03-22 | 2005-04-20 | 한국과학기술연구원 | Multi-degree of freedom telerobotic system for micro assembly |
| JP4032793B2 (en) | 2002-03-27 | 2008-01-16 | ソニー株式会社 | Charging system, charging control method, robot apparatus, charging control program, and recording medium |
| US7117067B2 (en) | 2002-04-16 | 2006-10-03 | Irobot Corporation | System and methods for adaptive control of robotic devices |
| US20030231244A1 (en) | 2002-04-22 | 2003-12-18 | Bonilla Victor G. | Method and system for manipulating a field of view of a video image from a remote vehicle |
| US20040172301A1 (en) | 2002-04-30 | 2004-09-02 | Mihai Dan M. | Remote multi-purpose user interface for a healthcare system |
| US6898484B2 (en) | 2002-05-01 | 2005-05-24 | Dorothy Lemelson | Robotic manufacturing and assembly with relative radio positioning using radio based location determination |
| CN100379391C (en) | 2002-05-07 | 2008-04-09 | 国立大学法人京都大学 | Medical cockpit system |
| US6836701B2 (en) | 2002-05-10 | 2004-12-28 | Royal Appliance Mfg. Co. | Autonomous multi-platform robotic system |
| JP4081747B2 (en) | 2002-05-17 | 2008-04-30 | 技研株式会社 | Robot drive control method and apparatus |
| US6839731B2 (en) | 2002-05-20 | 2005-01-04 | Vigilos, Inc. | System and method for providing data communication in a device network |
| US6807461B2 (en) | 2002-05-22 | 2004-10-19 | Kuka Roboter Gmbh | Coordinated robot control from multiple remote instruction sources |
| US6743721B2 (en) | 2002-06-10 | 2004-06-01 | United Microelectronics Corp. | Method and system for making cobalt silicide |
| KR100478452B1 (en) | 2002-06-12 | 2005-03-23 | 삼성전자주식회사 | Localization apparatus and method for mobile robot |
| US20030232649A1 (en) | 2002-06-18 | 2003-12-18 | Gizis Alexander C.M. | Gaming system and method |
| JP3910112B2 (en) | 2002-06-21 | 2007-04-25 | シャープ株式会社 | Camera phone |
| US7181455B2 (en) | 2002-06-27 | 2007-02-20 | Sun Microsystems, Inc. | Bandwidth management for remote services system |
| US6752539B2 (en) | 2002-06-28 | 2004-06-22 | International Buisness Machines Corporation | Apparatus and system for providing optical bus interprocessor interconnection |
| KR100556612B1 (en) | 2002-06-29 | 2006-03-06 | 삼성전자주식회사 | Position measuring device and method using laser |
| DE10231388A1 (en) | 2002-07-08 | 2004-02-05 | Alfred Kärcher Gmbh & Co. Kg | Tillage system |
| DE10231391A1 (en) | 2002-07-08 | 2004-02-12 | Alfred Kärcher Gmbh & Co. Kg | Tillage system |
| FR2842320A1 (en) | 2002-07-12 | 2004-01-16 | Thomson Licensing Sa | MULTIMEDIA DATA PROCESSING DEVICE |
| JP2004042230A (en) | 2002-07-15 | 2004-02-12 | Kawasaki Heavy Ind Ltd | Robot controller remote control method and remote control system |
| US7084809B2 (en) | 2002-07-15 | 2006-08-01 | Qualcomm, Incorporated | Apparatus and method of position determination using shared information |
| US7593030B2 (en) | 2002-07-25 | 2009-09-22 | Intouch Technologies, Inc. | Tele-robotic videoconferencing in a corporate environment |
| US20040162637A1 (en) | 2002-07-25 | 2004-08-19 | Yulun Wang | Medical tele-robotic system with a master remote station with an arbitrator |
| US6925357B2 (en) | 2002-07-25 | 2005-08-02 | Intouch Health, Inc. | Medical tele-robotic system |
| US20120072024A1 (en) | 2002-07-25 | 2012-03-22 | Yulun Wang | Telerobotic system with dual application screen presentation |
| DE10234233A1 (en) | 2002-07-27 | 2004-02-05 | Kuka Roboter Gmbh | Process for the exchange of data between controls of machines, in particular robots |
| EP1388813A2 (en) | 2002-08-09 | 2004-02-11 | Matsushita Electric Industrial Co., Ltd. | Apparatus and method for image watermarking |
| US7523505B2 (en) | 2002-08-16 | 2009-04-21 | Hx Technologies, Inc. | Methods and systems for managing distributed digital medical data |
| US20050288571A1 (en) | 2002-08-20 | 2005-12-29 | Welch Allyn, Inc. | Mobile medical workstation |
| US6753899B2 (en) | 2002-09-03 | 2004-06-22 | Audisoft | Method and apparatus for telepresence |
| ES2674568T3 (en) | 2002-09-13 | 2018-07-02 | Irobot Corporation | Navigation control system for a robotic device |
| US20040065073A1 (en) | 2002-10-08 | 2004-04-08 | Ingersoll-Rand Energy Systems Corporation | Flexible recuperator mounting system |
| US7881658B2 (en) | 2002-10-10 | 2011-02-01 | Znl Enterprises, Llc | Method and apparatus for entertainment and information services delivered via mobile telecommunication devices |
| WO2004036371A2 (en) | 2002-10-16 | 2004-04-29 | Rocksteady Networks, Inc. | System and method for dynamic bandwidth provisioning |
| US6804579B1 (en) | 2002-10-16 | 2004-10-12 | Abb, Inc. | Robotic wash cell using recycled pure water |
| AU2003288947A1 (en) | 2002-10-28 | 2004-05-25 | The General Hospital Corporation | Tissue disorder imaging analysis |
| US6879879B2 (en) | 2002-10-31 | 2005-04-12 | Hewlett-Packard Development Company, L.P. | Telepresence system with automatic user-surrogate height matching |
| US6920376B2 (en) | 2002-10-31 | 2005-07-19 | Hewlett-Packard Development Company, L.P. | Mutually-immersive mobile telepresence system with user rotation and surrogate translation |
| US20040093409A1 (en) | 2002-11-07 | 2004-05-13 | Vigilos, Inc. | System and method for external event determination utilizing an integrated information system |
| US8073304B2 (en) | 2002-11-16 | 2011-12-06 | Gregory Karel Rohlicek | Portable recorded television viewer |
| KR100542340B1 (en) | 2002-11-18 | 2006-01-11 | 삼성전자주식회사 | Home network system and its control method |
| US7123974B1 (en) | 2002-11-19 | 2006-10-17 | Rockwell Software Inc. | System and methodology providing audit recording and tracking in real time industrial controller environment |
| JP2004181229A (en) | 2002-11-20 | 2004-07-02 | Olympus Corp | System and method for supporting remote operation |
| KR20040046071A (en) | 2002-11-26 | 2004-06-05 | 삼성전자주식회사 | Method for displaying antenna-ba of terminal |
| JP3885019B2 (en) | 2002-11-29 | 2007-02-21 | 株式会社東芝 | Security system and mobile robot |
| US20040172306A1 (en) | 2002-12-02 | 2004-09-02 | Recare, Inc. | Medical data entry interface |
| US6889120B2 (en) | 2002-12-14 | 2005-05-03 | Hewlett-Packard Development Company, L.P. | Mutually-immersive mobile telepresence with gaze and eye contact preservation |
| US20090030552A1 (en) | 2002-12-17 | 2009-01-29 | Japan Science And Technology Agency | Robotics visual and auditory system |
| US7162338B2 (en) | 2002-12-17 | 2007-01-09 | Evolution Robotics, Inc. | Systems and methods for computing a relative pose for global localization in a visual simultaneous localization and mapping system |
| US6938167B2 (en) | 2002-12-18 | 2005-08-30 | America Online, Inc. | Using trusted communication channel to combat user name/password theft |
| US7584019B2 (en) | 2003-12-15 | 2009-09-01 | Dako Denmark A/S | Systems and methods for the automated pre-treatment and processing of biological samples |
| US20040135879A1 (en) | 2003-01-03 | 2004-07-15 | Stacy Marco A. | Portable wireless indoor/outdoor camera |
| US6745115B1 (en) | 2003-01-07 | 2004-06-01 | Garmin Ltd. | System, method and apparatus for searching geographic area using prioritized spacial order |
| US7158859B2 (en) | 2003-01-15 | 2007-01-02 | Intouch Technologies, Inc. | 5 degrees of freedom mobile robot |
| CN101390098A (en) | 2003-01-15 | 2009-03-18 | 英塔茨科技公司 | 5 degress of freedom mobile robot |
| ITMI20030121A1 (en) | 2003-01-27 | 2004-07-28 | Giuseppe Donato | MODULAR SURVEILLANCE SYSTEM FOR MONITORING OF CRITICAL ENVIRONMENTS. |
| US7404140B2 (en) | 2003-01-31 | 2008-07-22 | Siemens Medical Solutions Usa, Inc. | System for managing form information for use by portable devices |
| US7171286B2 (en) | 2003-02-24 | 2007-01-30 | Intouch Technologies, Inc. | Healthcare tele-robotic system with a robot that also functions as a remote station |
| US7158860B2 (en) | 2003-02-24 | 2007-01-02 | Intouch Technologies, Inc. | Healthcare tele-robotic system which allows parallel remote station observation |
| US7388981B2 (en) | 2003-02-27 | 2008-06-17 | Hewlett-Packard Development Company, L.P. | Telepresence system with automatic preservation of user head size |
| JP2004261941A (en) | 2003-03-04 | 2004-09-24 | Sharp Corp | Communication robot and communication system |
| US7262573B2 (en) | 2003-03-06 | 2007-08-28 | Intouch Technologies, Inc. | Medical tele-robotic system with a head worn device |
| US20050065813A1 (en) | 2003-03-11 | 2005-03-24 | Mishelevich David J. | Online medical evaluation system |
| US7593546B2 (en) | 2003-03-11 | 2009-09-22 | Hewlett-Packard Development Company, L.P. | Telepresence system with simultaneous automatic preservation of user height, perspective, and vertical gaze |
| US7818376B2 (en)* | 2003-03-19 | 2010-10-19 | International Business Machines Corporation | Off record chat |
| EP1627524A4 (en) | 2003-03-20 | 2009-05-27 | Ge Security Inc | Systems and methods for multi-resolution image processing |
| JP4124682B2 (en) | 2003-03-20 | 2008-07-23 | 日本放送協会 | Camera control device |
| US20040205664A1 (en) | 2003-03-25 | 2004-10-14 | Prendergast Thomas V. | Claim data and document processing system |
| JP2004298977A (en) | 2003-03-28 | 2004-10-28 | Sony Corp | Action control device, action control method, action control program and mobile robot device |
| US6804580B1 (en) | 2003-04-03 | 2004-10-12 | Kuka Roboter Gmbh | Method and control system for controlling a plurality of robots |
| US20040201602A1 (en) | 2003-04-14 | 2004-10-14 | Invensys Systems, Inc. | Tablet computer system for industrial process design, supervisory control, and data management |
| CA2466371A1 (en) | 2003-05-05 | 2004-11-05 | Engineering Services Inc. | Mobile robot hydrid communication link |
| WO2005008804A2 (en) | 2003-05-08 | 2005-01-27 | Power Estimate Company | Apparatus and method for providing electrical energy generated from motion to an electrically powered device |
| GB2391361B (en) | 2003-05-23 | 2005-09-21 | Bridgeworks Ltd | Library element management |
| US20040240981A1 (en) | 2003-05-29 | 2004-12-02 | I-Scan Robotics | Robot stacking system for flat glass |
| US6905941B2 (en) | 2003-06-02 | 2005-06-14 | International Business Machines Corporation | Structure and method to fabricate ultra-thin Si channel devices |
| US20050003330A1 (en) | 2003-07-02 | 2005-01-06 | Mehdi Asgarinejad | Interactive virtual classroom |
| US6888333B2 (en) | 2003-07-02 | 2005-05-03 | Intouch Health, Inc. | Holonomic platform for a robot |
| JP2005028066A (en) | 2003-07-08 | 2005-02-03 | Kikuta Sogo Kikaku:Kk | Remote cleaning management system |
| US7154526B2 (en) | 2003-07-11 | 2006-12-26 | Fuji Xerox Co., Ltd. | Telepresence system and method for video teleconferencing |
| US20050065435A1 (en) | 2003-07-22 | 2005-03-24 | John Rauch | User interface for remote control of medical devices |
| US7995090B2 (en) | 2003-07-28 | 2011-08-09 | Fuji Xerox Co., Ltd. | Video enabled tele-presence control host |
| US7395126B2 (en) | 2003-07-29 | 2008-07-01 | Far Touch, Inc. | Remote control of wireless electromechanical device using a web browser |
| US20050027567A1 (en) | 2003-07-29 | 2005-02-03 | Taha Amer Jamil | System and method for health care data collection and management |
| US7133062B2 (en) | 2003-07-31 | 2006-11-07 | Polycom, Inc. | Graphical user interface for video feed on videoconference terminal |
| DE20312211U1 (en) | 2003-08-07 | 2003-10-30 | Yueh, Wen Hsiang, Hsinchuang, Taipeh | Swiveling USB plug |
| US7413040B2 (en) | 2003-08-12 | 2008-08-19 | White Box Robotics, Inc. | Robot with removable mounting elements |
| JP2005059170A (en) | 2003-08-18 | 2005-03-10 | Honda Motor Co Ltd | Information collecting robot |
| US7432949B2 (en) | 2003-08-20 | 2008-10-07 | Christophe Remy | Mobile videoimaging, videocommunication, video production (VCVP) system |
| US7982763B2 (en) | 2003-08-20 | 2011-07-19 | King Simon P | Portable pan-tilt camera and lighting unit for videoimaging, videoconferencing, production and recording |
| WO2005033832A2 (en) | 2003-08-28 | 2005-04-14 | University Of Maryland, Baltimore | Techniques for delivering coordination data for a shared facility |
| US20050049898A1 (en) | 2003-09-01 | 2005-03-03 | Maiko Hirakawa | Telemedicine system using the internet |
| US7174238B1 (en) | 2003-09-02 | 2007-02-06 | Stephen Eliot Zweig | Mobile robotic system with web server and digital radio links |
| US20050065438A1 (en) | 2003-09-08 | 2005-03-24 | Miller Landon C.G. | System and method of capturing and managing information during a medical diagnostic imaging procedure |
| JP2005103680A (en) | 2003-09-29 | 2005-04-21 | Toshiba Corp | Monitoring system and monitoring robot |
| JP3834307B2 (en)* | 2003-09-29 | 2006-10-18 | ファナック株式会社 | Robot system |
| IL158276A (en) | 2003-10-02 | 2010-04-29 | Radvision Ltd | Method for dynamically optimizing bandwidth allocation in variable bitrate (multi-rate) conferences |
| ES2741016T3 (en) | 2003-10-07 | 2020-02-07 | Librestream Tech Inc | Camera to communicate a continuous multimedia transmission to a Remote Client |
| JP2005111083A (en) | 2003-10-09 | 2005-04-28 | Olympus Corp | Medical integrated system |
| US7307651B2 (en) | 2003-10-16 | 2007-12-11 | Mark A. Chew | Two-way mobile video/audio/data interactive companion (MVIC) system |
| KR100820743B1 (en) | 2003-10-21 | 2008-04-10 | 삼성전자주식회사 | Charging device of mobile robot |
| JP4325853B2 (en) | 2003-10-31 | 2009-09-02 | 富士通株式会社 | Communication adapter device |
| US7096090B1 (en) | 2003-11-03 | 2006-08-22 | Stephen Eliot Zweig | Mobile robotic router with web server and digital radio links |
| US20050125083A1 (en) | 2003-11-10 | 2005-06-09 | Kiko Frederick J. | Automation apparatus and methods |
| US20060010028A1 (en) | 2003-11-14 | 2006-01-12 | Herb Sorensen | Video shopper tracking system and method |
| US7115102B2 (en) | 2003-11-17 | 2006-10-03 | Abbruscato Charles R | Electronic stethoscope system |
| US7161322B2 (en) | 2003-11-18 | 2007-01-09 | Intouch Technologies, Inc. | Robot with a manipulator arm |
| US7092001B2 (en) | 2003-11-26 | 2006-08-15 | Sap Aktiengesellschaft | Video conferencing system with physical cues |
| GB2408655B (en) | 2003-11-27 | 2007-02-28 | Motorola Inc | Communication system, communication units and method of ambience listening thereto |
| US7624166B2 (en) | 2003-12-02 | 2009-11-24 | Fuji Xerox Co., Ltd. | System and methods for remote control of multiple display and devices |
| US7292912B2 (en) | 2003-12-05 | 2007-11-06 | Lntouch Technologies, Inc. | Door knocker control system for a remote controlled teleconferencing robot |
| US7813836B2 (en) | 2003-12-09 | 2010-10-12 | Intouch Technologies, Inc. | Protocol for a remotely controlled videoconferencing robot |
| EP1704710A4 (en) | 2003-12-24 | 2007-09-19 | Walker Digital Llc | Method and apparatus for automatically capturing and managing images |
| US7613313B2 (en) | 2004-01-09 | 2009-11-03 | Hewlett-Packard Development Company, L.P. | System and method for control of audio field based on position of user |
| US8824730B2 (en) | 2004-01-09 | 2014-09-02 | Hewlett-Packard Development Company, L.P. | System and method for control of video bandwidth based on pose of a person |
| US20050154265A1 (en) | 2004-01-12 | 2005-07-14 | Miro Xavier A. | Intelligent nurse robot |
| US8229186B2 (en) | 2004-01-15 | 2012-07-24 | Algotec Systems Ltd. | Vessel centerline determination |
| WO2005069890A2 (en) | 2004-01-15 | 2005-08-04 | Mega Robot, Inc. | System and method for reconfiguring an autonomous robot |
| JPWO2005068270A1 (en) | 2004-01-16 | 2007-08-23 | 佳章 瀧田 | Robot arm type automatic car wash equipment |
| US7332890B2 (en) | 2004-01-21 | 2008-02-19 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| US7729801B2 (en) | 2004-02-03 | 2010-06-01 | F Robotics Acquisitions Ltd. | Robot docking station and robot for use therewith |
| US7079173B2 (en) | 2004-02-04 | 2006-07-18 | Hewlett-Packard Development Company, L.P. | Displaying a wide field of view video image |
| US20050182322A1 (en) | 2004-02-17 | 2005-08-18 | Liebel-Flarsheim Company | Injector auto purge |
| US20050204438A1 (en) | 2004-02-26 | 2005-09-15 | Yulun Wang | Graphical interface for a remote presence system |
| US7756614B2 (en) | 2004-02-27 | 2010-07-13 | Hewlett-Packard Development Company, L.P. | Mobile device control system |
| CN1259891C (en) | 2004-03-17 | 2006-06-21 | 哈尔滨工业大学 | Robot assisted bone setting operation medical system with lock marrow internal nail |
| JP2005270430A (en) | 2004-03-25 | 2005-10-06 | Funai Electric Co Ltd | Station for mobile robot |
| US20050264649A1 (en) | 2004-03-29 | 2005-12-01 | Calvin Chang | Mobile video-interpreting mounting system |
| ATE429010T1 (en) | 2004-03-29 | 2009-05-15 | Koninkl Philips Electronics Nv | METHOD FOR CONTROLLING MULTIPLE APPLICATIONS AND DIALOGUE MANAGEMENT SYSTEM |
| US20050225634A1 (en) | 2004-04-05 | 2005-10-13 | Sam Brunetti | Closed circuit TV security system |
| JP2005312096A (en) | 2004-04-16 | 2005-11-04 | Funai Electric Co Ltd | Electric apparatus |
| TWI258259B (en) | 2004-04-20 | 2006-07-11 | Jason Yan | Automatic charging system of mobile robotic electronic device |
| EP1738232A4 (en) | 2004-04-22 | 2009-10-21 | Frontline Robotics | Open control system architecture for mobile autonomous systems |
| US7769705B1 (en) | 2004-05-21 | 2010-08-03 | Ray Anthony Luechtefeld | Method, artificially intelligent system and networked complex for facilitating group interactions |
| US7189879B2 (en)* | 2004-05-25 | 2007-03-13 | Schering Ag | Process for the production of 1-hydroxymethyl-1,3,5-triazapentane, trihydrochloride |
| US7949616B2 (en) | 2004-06-01 | 2011-05-24 | George Samuel Levy | Telepresence by human-assisted remote controlled devices and robots |
| US7011538B2 (en) | 2004-06-02 | 2006-03-14 | Elementech International Co., Ltd. | Dual input charger with cable storing mechanism |
| WO2005119591A1 (en) | 2004-06-04 | 2005-12-15 | Matsushita Electric Industrial Co., Ltd. | Display control device, display control method, program, and portable apparatus |
| US20050283414A1 (en) | 2004-06-17 | 2005-12-22 | Fernandes Curtis T | Remote system management |
| JP4479372B2 (en) | 2004-06-25 | 2010-06-09 | ソニー株式会社 | Environmental map creation method, environmental map creation device, and mobile robot device |
| US7292257B2 (en) | 2004-06-28 | 2007-11-06 | Microsoft Corporation | Interactive viewpoint video system and process |
| US20060007943A1 (en) | 2004-07-07 | 2006-01-12 | Fellman Ronald D | Method and system for providing site independent real-time multimedia transport over packet-switched networks |
| US7539187B2 (en) | 2004-07-07 | 2009-05-26 | Qvidium Technologies, Inc. | System and method for low-latency content-sensitive forward error correction |
| US8503340B1 (en) | 2004-07-11 | 2013-08-06 | Yongyong Xu | WiFi phone system |
| US8077963B2 (en) | 2004-07-13 | 2011-12-13 | Yulun Wang | Mobile robot with a head-based movement mapping scheme |
| US7551647B2 (en) | 2004-07-19 | 2009-06-23 | Qvidium Technologies, Inc. | System and method for clock synchronization over packet-switched networks |
| CA2513202C (en) | 2004-07-23 | 2015-03-31 | Mehran Anvari | Multi-purpose robotic operating system and method |
| US7319469B2 (en) | 2004-07-26 | 2008-01-15 | Sony Corporation | Copy protection arrangement |
| CN100394897C (en) | 2004-08-03 | 2008-06-18 | 张毓笠 | Ultrasonic Bone Surgical Instrument with Compound Vibration |
| JP4912577B2 (en) | 2004-09-01 | 2012-04-11 | 本田技研工業株式会社 | Biped walking robot charging system |
| US20060052676A1 (en) | 2004-09-07 | 2006-03-09 | Yulun Wang | Tele-presence system that allows for remote monitoring/observation and review of a patient and their medical records |
| US7502498B2 (en) | 2004-09-10 | 2009-03-10 | Available For Licensing | Patient monitoring apparatus |
| FI116749B (en) | 2004-09-14 | 2006-02-15 | Nokia Corp | Device comprising camera elements |
| US20060064212A1 (en) | 2004-09-22 | 2006-03-23 | Cycle Time Corporation | Reactive automated guided vehicle vision guidance system |
| US20060066609A1 (en)* | 2004-09-28 | 2006-03-30 | Iodice Arthur P | Methods and systems for viewing geometry of an object model generated by a CAD tool |
| US7720570B2 (en) | 2004-10-01 | 2010-05-18 | Redzone Robotics, Inc. | Network architecture for remote robot with interchangeable tools |
| US8060376B2 (en) | 2004-10-01 | 2011-11-15 | Nomoreclipboard, Llc | System and method for collection of community health and administrative data |
| JP2006109094A (en) | 2004-10-05 | 2006-04-20 | Nec Software Kyushu Ltd | Remote controller, remote control system, and remote control method |
| US7441953B2 (en) | 2004-10-07 | 2008-10-28 | University Of Florida Research Foundation, Inc. | Radiographic medical imaging system using robot mounted source and sensor for dynamic image capture and tomography |
| US7347499B2 (en)* | 2004-10-14 | 2008-03-25 | Attwood Corporation | Marine seat interchangeable component assembly and method |
| US20060087746A1 (en) | 2004-10-22 | 2006-04-27 | Kenneth Lipow | Remote augmented motor-sensory interface for surgery |
| KR100645379B1 (en) | 2004-10-29 | 2006-11-15 | 삼성광주전자 주식회사 | Robot Control System and Robot Control Method |
| KR100703692B1 (en) | 2004-11-03 | 2007-04-05 | 삼성전자주식회사 | System, apparatus and method for distinguishing objects existing in space |
| US20060098573A1 (en) | 2004-11-08 | 2006-05-11 | Beer John C | System and method for the virtual aggregation of network links |
| US20060173712A1 (en) | 2004-11-12 | 2006-08-03 | Dirk Joubert | Portable medical information system |
| US8687008B2 (en) | 2004-11-15 | 2014-04-01 | Nvidia Corporation | Latency tolerant system for executing video processing operations |
| US7522528B2 (en) | 2004-11-18 | 2009-04-21 | Qvidium Technologies, Inc. | Low-latency automatic repeat request packet recovery mechanism for media streams |
| US20060122482A1 (en) | 2004-11-22 | 2006-06-08 | Foresight Imaging Inc. | Medical image acquisition system for receiving and transmitting medical images instantaneously and method of using the same |
| CA2589122C (en) | 2004-12-03 | 2015-07-21 | Mckesson Automation Inc. | Mobile point of care system and associated method and computer program product |
| US7400578B2 (en) | 2004-12-16 | 2008-07-15 | International Business Machines Corporation | Method and system for throttling network transmissions using per-receiver bandwidth control at the application layer of the transmitting server |
| KR100499770B1 (en) | 2004-12-30 | 2005-07-07 | 주식회사 아이오. 테크 | Network based robot control system |
| KR100497310B1 (en) | 2005-01-10 | 2005-06-23 | 주식회사 아이오. 테크 | Selection and playback method of multimedia content having motion information in network based robot system |
| US7395508B2 (en) | 2005-01-14 | 2008-07-01 | International Business Machines Corporation | Method and apparatus for providing an interactive presentation environment |
| US7222000B2 (en) | 2005-01-18 | 2007-05-22 | Intouch Technologies, Inc. | Mobile videoconferencing platform with automatic shut-off features |
| JP2006203821A (en) | 2005-01-24 | 2006-08-03 | Sony Corp | Automatic transmission system |
| US20060173708A1 (en) | 2005-01-28 | 2006-08-03 | Circle Of Care, Inc. | System and method for providing health care |
| US20060176832A1 (en) | 2005-02-04 | 2006-08-10 | Sean Miceli | Adaptive bit-rate adjustment of multimedia communications channels using transport control protocol |
| KR100636270B1 (en) | 2005-02-04 | 2006-10-19 | 삼성전자주식회사 | Home network system and its control method |
| US7944469B2 (en) | 2005-02-14 | 2011-05-17 | Vigilos, Llc | System and method for using self-learning rules to enable adaptive security monitoring |
| US20060189393A1 (en) | 2005-02-22 | 2006-08-24 | Albert Edery | Real action network gaming system |
| US20060224781A1 (en) | 2005-03-10 | 2006-10-05 | Jen-Ming Tsao | Method and apparatus for controlling a user interface of a consumer electronic device |
| US7644898B2 (en) | 2005-03-28 | 2010-01-12 | Compview Medical, Llc | Medical boom with articulated arms and a base with preconfigured removable modular racks used for storing electronic and utility equipment |
| US7808913B2 (en) | 2005-04-15 | 2010-10-05 | New Jersey Institute Of Technology | Dynamic bandwidth allocation and service differentiation for broadband passive optical networks |
| US7436143B2 (en) | 2005-04-25 | 2008-10-14 | M-Bots, Inc. | Miniature surveillance robot |
| US7680038B1 (en) | 2005-04-25 | 2010-03-16 | Electronic Arts, Inc. | Dynamic bandwidth detection and response for online games |
| US7864209B2 (en)* | 2005-04-28 | 2011-01-04 | Apple Inc. | Audio processing in a multi-participant conference |
| CA2605239A1 (en) | 2005-05-02 | 2006-11-09 | University Of Virginia Patent Foundation | Systems, devices, and methods for interpreting movement |
| EP2336923A3 (en) | 2005-05-04 | 2012-08-15 | Board of Regents, The University of Texas System | System for delivering medical services from a remote location |
| US7240879B1 (en) | 2005-05-06 | 2007-07-10 | United States of America as represented by the Administration of the National Aeronautics and Space Administration | Method and associated apparatus for capturing, servicing and de-orbiting earth satellites using robotics |
| US20060259193A1 (en) | 2005-05-12 | 2006-11-16 | Yulun Wang | Telerobotic system with a dual application screen presentation |
| KR100594165B1 (en) | 2005-05-24 | 2006-06-28 | 삼성전자주식회사 | Robot speed control method in network based robot control system and network based robot control system |
| US20060293788A1 (en) | 2005-06-26 | 2006-12-28 | Pavel Pogodin | Robotic floor care appliance with improved remote management |
| JP2007007040A (en) | 2005-06-29 | 2007-01-18 | Hitachi Medical Corp | Surgery support system |
| GB2428110A (en) | 2005-07-06 | 2007-01-17 | Armstrong Healthcare Ltd | A robot and method of registering a robot. |
| US7379664B2 (en) | 2005-07-26 | 2008-05-27 | Tinkers & Chance | Remote view and controller for a camera |
| AU2006279259B2 (en) | 2005-08-11 | 2013-03-07 | Beon Light Corporation Pty Ltd | A sensor with selectable sensing orientation used for controlling an electrical device |
| KR100749579B1 (en) | 2005-09-05 | 2007-08-16 | 삼성광주전자 주식회사 | Mobile robot system having a plurality of replaceable work modules and control method thereof |
| US8049678B2 (en) | 2005-09-09 | 2011-11-01 | Lg Electronics, Inc. | Image capturing and displaying method and system |
| US7643051B2 (en) | 2005-09-09 | 2010-01-05 | Roy Benjamin Sandberg | Mobile video teleconferencing system and control method |
| JP2007081646A (en) | 2005-09-13 | 2007-03-29 | Toshiba Corp | Transceiver |
| CN1743144A (en) | 2005-09-29 | 2006-03-08 | 天津理工大学 | Internet-based remote control method for robots |
| US9198728B2 (en) | 2005-09-30 | 2015-12-01 | Intouch Technologies, Inc. | Multi-camera mobile teleconferencing platform |
| EP2050544B1 (en) | 2005-09-30 | 2011-08-31 | iRobot Corporation | Robot system with wireless communication by TCP/IP transmissions |
| US8098603B2 (en) | 2005-09-30 | 2012-01-17 | Intel Corporation | Bandwidth adaptation in a wireless network |
| JP2009516237A (en) | 2005-10-07 | 2009-04-16 | インテンシーブ ケア オン−ライン | Online medical treatment service system and method of using the same |
| GB0520576D0 (en) | 2005-10-10 | 2005-11-16 | Applied Generics Ltd | Using traffic monitoring information to provide better driver route planning |
| US20070093279A1 (en) | 2005-10-12 | 2007-04-26 | Craig Janik | Wireless headset system for the automobile |
| US7733224B2 (en) | 2006-06-30 | 2010-06-08 | Bao Tran | Mesh network personal emergency response appliance |
| WO2007051079A2 (en) | 2005-10-28 | 2007-05-03 | Viasat, Inc. | Adaptive coding and modulation for broadband data transmission |
| US7751780B2 (en) | 2005-11-23 | 2010-07-06 | Qualcomm Incorporated | Method and apparatus for collecting information from a wireless device |
| US20070120965A1 (en) | 2005-11-25 | 2007-05-31 | Sandberg Roy B | Mobile video teleconferencing authentication and management system and method |
| KR101099808B1 (en) | 2005-12-02 | 2011-12-27 | 아이로보트 코퍼레이션 | Robotic systems |
| JP4466603B2 (en) | 2005-12-06 | 2010-05-26 | 日本ビクター株式会社 | Optical disc inspection apparatus and optical disc inspection method |
| US20070135967A1 (en) | 2005-12-08 | 2007-06-14 | Jung Seung W | Apparatus and method of controlling network-based robot |
| EP1796332B1 (en) | 2005-12-08 | 2012-11-14 | Electronics and Telecommunications Research Institute | Token bucket dynamic bandwidth allocation |
| US8190238B2 (en) | 2005-12-09 | 2012-05-29 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US7480870B2 (en) | 2005-12-23 | 2009-01-20 | Apple Inc. | Indication of progress towards satisfaction of a user input condition |
| US8577538B2 (en) | 2006-07-14 | 2013-11-05 | Irobot Corporation | Method and system for controlling a remote vehicle |
| JP2007232208A (en) | 2006-01-31 | 2007-09-13 | Mitsuboshi Belting Ltd | Toothed belt and tooth cloth used therefor |
| JP2007245332A (en) | 2006-02-14 | 2007-09-27 | Honda Motor Co Ltd | Charging system for legged mobile robot |
| US7769492B2 (en) | 2006-02-22 | 2010-08-03 | Intouch Technologies, Inc. | Graphical interface for a remote presence system |
| JP2007248823A (en) | 2006-03-16 | 2007-09-27 | Ricoh Co Ltd | Toner, developer, container containing toner, process cartridge, and image forming method |
| JP4728860B2 (en) | 2006-03-29 | 2011-07-20 | 株式会社東芝 | Information retrieval device |
| EP2027806A1 (en) | 2006-04-04 | 2009-02-25 | Samsung Electronics Co., Ltd. | Robot cleaner system having robot cleaner and docking station |
| US20100171826A1 (en) | 2006-04-12 | 2010-07-08 | Store Eyes, Inc. | Method for measuring retail display and compliance |
| US7539533B2 (en) | 2006-05-16 | 2009-05-26 | Bao Tran | Mesh network monitoring appliance |
| WO2007136769A2 (en) | 2006-05-19 | 2007-11-29 | Mako Surgical Corp. | Method and apparatus for controlling a haptic device |
| JP2007316966A (en) | 2006-05-26 | 2007-12-06 | Fujitsu Ltd | Mobile robot, its control method and program |
| US8849679B2 (en) | 2006-06-15 | 2014-09-30 | Intouch Technologies, Inc. | Remote controlled robot system that provides medical images |
| US20070291128A1 (en) | 2006-06-15 | 2007-12-20 | Yulun Wang | Mobile teleconferencing system that projects an image provided by a mobile robot |
| US7920962B2 (en) | 2006-06-19 | 2011-04-05 | Kiva Systems, Inc. | System and method for coordinating movement of mobile drive units |
| US8649899B2 (en) | 2006-06-19 | 2014-02-11 | Amazon Technologies, Inc. | System and method for maneuvering a mobile drive unit |
| US8073564B2 (en) | 2006-07-05 | 2011-12-06 | Battelle Energy Alliance, Llc | Multi-robot control interface |
| US7587260B2 (en) | 2006-07-05 | 2009-09-08 | Battelle Energy Alliance, Llc | Autonomous navigation system and method |
| US8843244B2 (en) | 2006-10-06 | 2014-09-23 | Irobot Corporation | Autonomous behaviors for a remove vehicle |
| US20080033641A1 (en) | 2006-07-25 | 2008-02-07 | Medalia Michael J | Method of generating a three-dimensional interactive tour of a geographic location |
| US7599290B2 (en) | 2006-08-11 | 2009-10-06 | Latitude Broadband, Inc. | Methods and systems for providing quality of service in packet-based core transport networks |
| US8564544B2 (en) | 2006-09-06 | 2013-10-22 | Apple Inc. | Touch screen device, method, and graphical user interface for customizing display of content category icons |
| US7693757B2 (en) | 2006-09-21 | 2010-04-06 | International Business Machines Corporation | System and method for performing inventory using a mobile inventory robot |
| US8180486B2 (en) | 2006-10-02 | 2012-05-15 | Honda Motor Co., Ltd. | Mobile robot and controller for same |
| US7761185B2 (en) | 2006-10-03 | 2010-07-20 | Intouch Technologies, Inc. | Remote presence display through remotely controlled robot |
| US20070170886A1 (en) | 2006-10-03 | 2007-07-26 | Plishner Paul J | Vehicle equipped for providing solar electric power for off-vehicle use and systems in support thereof |
| US7654348B2 (en) | 2006-10-06 | 2010-02-02 | Irobot Corporation | Maneuvering robotic vehicles having a positionable sensor head |
| US20080126132A1 (en) | 2006-11-28 | 2008-05-29 | General Electric Company | Smart bed system |
| US8095238B2 (en) | 2006-11-29 | 2012-01-10 | Irobot Corporation | Robot development platform |
| US7630314B2 (en) | 2006-12-05 | 2009-12-08 | Latitue Broadband, Inc. | Methods and systems for dynamic bandwidth management for quality of service in IP Core and access networks |
| TWI330305B (en) | 2006-12-28 | 2010-09-11 | Ind Tech Res Inst | Method for routing a robotic apparatus to a service station and robotic apparatus service system using thereof |
| US7557758B2 (en) | 2007-03-26 | 2009-07-07 | Broadcom Corporation | Very high frequency dielectric substrate wave guide |
| US20080232763A1 (en)* | 2007-03-15 | 2008-09-25 | Colin Brady | System and method for adjustment of video playback resolution |
| US8265793B2 (en) | 2007-03-20 | 2012-09-11 | Irobot Corporation | Mobile robot for telecommunication |
| US8612051B2 (en) | 2007-04-20 | 2013-12-17 | Innovation First, Inc. | Securing communications with robots |
| US8305914B2 (en) | 2007-04-30 | 2012-11-06 | Hewlett-Packard Development Company, L.P. | Method for signal adjustment through latency control |
| US9160783B2 (en) | 2007-05-09 | 2015-10-13 | Intouch Technologies, Inc. | Robot system that operates through a network firewall |
| ES2571739T3 (en) | 2007-05-09 | 2016-05-26 | Irobot Corp | Autonomous compact covering robot |
| US8175677B2 (en) | 2007-06-07 | 2012-05-08 | MRI Interventions, Inc. | MRI-guided medical interventional systems and methods |
| US8451731B1 (en) | 2007-07-25 | 2013-05-28 | Xangati, Inc. | Network monitoring using virtual packets |
| KR20090012542A (en) | 2007-07-30 | 2009-02-04 | 주식회사 마이크로로봇 | Robot Home Monitoring System |
| US8400491B1 (en) | 2007-08-01 | 2013-03-19 | Sprint Communications Company L.P. | Use-based adaptive video client for a bandwidth-constrained network |
| US7631833B1 (en) | 2007-08-03 | 2009-12-15 | The United States Of America As Represented By The Secretary Of The Navy | Smart counter asymmetric threat micromunition with autonomous target selection and homing |
| US8639797B1 (en) | 2007-08-03 | 2014-01-28 | Xangati, Inc. | Network monitoring of behavior probability density |
| US20090044334A1 (en) | 2007-08-13 | 2009-02-19 | Valence Broadband, Inc. | Automatically adjusting patient platform support height in response to patient related events |
| US8116910B2 (en) | 2007-08-23 | 2012-02-14 | Intouch Technologies, Inc. | Telepresence robot with a printer |
| KR101330734B1 (en) | 2007-08-24 | 2013-11-20 | 삼성전자주식회사 | Robot cleaner system having robot cleaner and docking station |
| US20090070135A1 (en) | 2007-09-10 | 2009-03-12 | General Electric Company | System and method for improving claims processing in the healthcare industry |
| US8243119B2 (en) | 2007-09-30 | 2012-08-14 | Optical Fusion Inc. | Recording and videomail for video conferencing call systems |
| US20090248200A1 (en) | 2007-10-22 | 2009-10-01 | North End Technologies | Method & apparatus for remotely operating a robotic device linked to a communications network |
| US8045458B2 (en) | 2007-11-08 | 2011-10-25 | Mcafee, Inc. | Prioritizing network traffic |
| US7987069B2 (en) | 2007-11-12 | 2011-07-26 | Bee Cave, Llc | Monitoring patient support exiting and initiating response |
| JP2009125133A (en) | 2007-11-20 | 2009-06-11 | Asano Dental Inc | Dental care support system and X-ray sensor for dental care support |
| US7856501B2 (en) | 2007-12-04 | 2010-12-21 | Sony Computer Entertainment Inc. | Network traffic prioritization |
| US20090164657A1 (en) | 2007-12-20 | 2009-06-25 | Microsoft Corporation | Application aware rate control |
| US20090171170A1 (en) | 2007-12-28 | 2009-07-02 | Nellcor Puritan Bennett Llc | Medical Monitoring With Portable Electronic Device System And Method |
| US20090102919A1 (en) | 2007-12-31 | 2009-04-23 | Zamierowski David S | Audio-video system and method for telecommunications |
| US20090177641A1 (en) | 2008-01-03 | 2009-07-09 | General Electric Company | Patient monitoring network and method of using the patient monitoring network |
| KR100971609B1 (en) | 2008-03-05 | 2010-07-20 | 주식회사 팬택 | Method for improving connection performance to receiving terminal and system for improving connection performance |
| US8374171B2 (en) | 2008-03-06 | 2013-02-12 | Pantech Co., Ltd. | Method for reducing the risk of call connection failure and system to perform the method |
| US8244469B2 (en) | 2008-03-16 | 2012-08-14 | Irobot Corporation | Collaborative engagement for target identification and tracking |
| US10875182B2 (en) | 2008-03-20 | 2020-12-29 | Teladoc Health, Inc. | Remote presence system mounted to operating room hardware |
| CA2659698C (en) | 2008-03-21 | 2020-06-16 | Dressbot Inc. | System and method for collaborative shopping, business and entertainment |
| US20100088232A1 (en) | 2008-03-21 | 2010-04-08 | Brian Gale | Verification monitor for critical test result delivery systems |
| US8179418B2 (en) | 2008-04-14 | 2012-05-15 | Intouch Technologies, Inc. | Robotic based health care system |
| US8170241B2 (en) | 2008-04-17 | 2012-05-01 | Intouch Technologies, Inc. | Mobile tele-presence system with a microphone system |
| US9193065B2 (en) | 2008-07-10 | 2015-11-24 | Intouch Technologies, Inc. | Docking system for a tele-presence robot |
| US9842192B2 (en) | 2008-07-11 | 2017-12-12 | Intouch Technologies, Inc. | Tele-presence robot system with multi-cast features |
| CN101640295A (en) | 2008-07-31 | 2010-02-03 | 鸿富锦精密工业(深圳)有限公司 | Charging device |
| WO2010014864A1 (en) | 2008-07-31 | 2010-02-04 | Consortium Of Rheumatology Researchers Of North America, Inc. | System and method for collecting and managing patient data |
| US8476555B2 (en) | 2008-08-29 | 2013-07-02 | Illinois Tool Works Inc. | Portable welding wire feed system and method |
| JP5040865B2 (en) | 2008-09-08 | 2012-10-03 | 日本電気株式会社 | Robot control system, remote management device, remote management method and program |
| US8144182B2 (en) | 2008-09-16 | 2012-03-27 | Biscotti Inc. | Real time video communications system |
| US8340819B2 (en) | 2008-09-18 | 2012-12-25 | Intouch Technologies, Inc. | Mobile videoconferencing robot system with network adaptive driving |
| US8180712B2 (en) | 2008-09-30 | 2012-05-15 | The Nielsen Company (Us), Llc | Methods and apparatus for determining whether a media presentation device is in an on state or an off state |
| US8000235B2 (en) | 2008-10-05 | 2011-08-16 | Contextream Ltd. | Bandwidth allocation method and apparatus |
| US20100145479A1 (en) | 2008-10-09 | 2010-06-10 | G2 Software Systems, Inc. | Wireless Portable Sensor Monitoring System |
| US8996165B2 (en) | 2008-10-21 | 2015-03-31 | Intouch Technologies, Inc. | Telepresence robot with a camera boom |
| JP5587331B2 (en) | 2008-11-21 | 2014-09-10 | ストライカー コーポレイション | Wireless operating room communication system |
| US8463435B2 (en) | 2008-11-25 | 2013-06-11 | Intouch Technologies, Inc. | Server connectivity control for tele-presence robot |
| US7995493B2 (en) | 2008-12-23 | 2011-08-09 | Airvana, Corp. | Estimating bandwidth in communication networks |
| US8462681B2 (en) | 2009-01-15 | 2013-06-11 | The Trustees Of Stevens Institute Of Technology | Method and apparatus for adaptive transmission of sensor data with latency controls |
| US8849680B2 (en) | 2009-01-29 | 2014-09-30 | Intouch Technologies, Inc. | Documentation through a remote presence robot |
| US8418073B2 (en) | 2009-03-09 | 2013-04-09 | Intuitive Surgical Operations, Inc. | User interfaces for electrosurgical tools in robotic surgical systems |
| US8423284B2 (en) | 2009-04-15 | 2013-04-16 | Abalta Technologies, Inc. | Monitoring, recording and testing of navigation systems |
| US8897920B2 (en) | 2009-04-17 | 2014-11-25 | Intouch Technologies, Inc. | Tele-presence robot system with software modularity, projector and laser pointer |
| US8340654B2 (en) | 2009-05-26 | 2012-12-25 | Lextech Labs Llc | Apparatus and method for video display and control for portable device |
| JP5430246B2 (en) | 2009-06-23 | 2014-02-26 | 任天堂株式会社 | GAME DEVICE AND GAME PROGRAM |
| US8626499B2 (en) | 2009-07-21 | 2014-01-07 | Vivu, Inc. | Multimedia signal latency management by skipping |
| JP2013503571A (en) | 2009-08-26 | 2013-01-31 | インタッチ・テクノロジーズ・インコーポレーテッド | Portable telepresence device |
| US11399153B2 (en) | 2009-08-26 | 2022-07-26 | Teladoc Health, Inc. | Portable telepresence apparatus |
| US8384755B2 (en) | 2009-08-26 | 2013-02-26 | Intouch Technologies, Inc. | Portable remote presence robot |
| US8244402B2 (en) | 2009-09-22 | 2012-08-14 | GM Global Technology Operations LLC | Visual perception system and method for a humanoid robot |
| US8473558B2 (en) | 2009-09-22 | 2013-06-25 | Thwapr, Inc. | Progressive registration for mobile media sharing |
| GB0917988D0 (en) | 2009-10-14 | 2009-12-02 | Johnson Matthey Plc | Method |
| US9626826B2 (en) | 2010-06-10 | 2017-04-18 | Nguyen Gaming Llc | Location-based real-time casino data |
| US20110153198A1 (en) | 2009-12-21 | 2011-06-23 | Navisus LLC | Method for the display of navigation instructions using an augmented-reality concept |
| US8212533B2 (en) | 2009-12-23 | 2012-07-03 | Toyota Motor Engineering & Manufacturing North America, Inc. | Robot battery charging apparatuses and methods |
| US11154981B2 (en) | 2010-02-04 | 2021-10-26 | Teladoc Health, Inc. | Robot user interface for telepresence robot system |
| US20110187875A1 (en) | 2010-02-04 | 2011-08-04 | Intouch Technologies, Inc. | Robot face used in a sterile environment |
| US9823342B2 (en) | 2010-02-09 | 2017-11-21 | Aeroscout, Ltd. | System and method for mobile monitoring of non-associated tags |
| US8670017B2 (en) | 2010-03-04 | 2014-03-11 | Intouch Technologies, Inc. | Remote presence system including a cart that supports a robot face and an overhead camera |
| US8837900B2 (en) | 2010-05-11 | 2014-09-16 | Cisco Technology, Inc. | Unintended video recording detection in a video recording device |
| US10343283B2 (en) | 2010-05-24 | 2019-07-09 | Intouch Technologies, Inc. | Telepresence robot system that can be accessed by a cellular phone |
| US10808882B2 (en) | 2010-05-26 | 2020-10-20 | Intouch Technologies, Inc. | Tele-robotic system with a robot face placed on a chair |
| US8429674B2 (en) | 2010-07-20 | 2013-04-23 | Apple Inc. | Maintaining data states upon forced exit |
| US8522167B2 (en) | 2010-08-09 | 2013-08-27 | Microsoft Corporation | Relationship visualization and graphical interaction model in it client management |
| US8832293B2 (en) | 2010-09-03 | 2014-09-09 | Hulu, LLC | Bandwidth allocation with modified seek function |
| US8781629B2 (en) | 2010-09-22 | 2014-07-15 | Toyota Motor Engineering & Manufacturing North America, Inc. | Human-robot interface apparatuses and methods of controlling robots |
| EP2466492A1 (en) | 2010-12-20 | 2012-06-20 | Paul Peter Vaclik | A method of making text data associated with video data searchable |
| EP2820995B1 (en) | 2011-01-07 | 2016-07-06 | iRobot Corporation | Evacuation station system |
| US12093036B2 (en) | 2011-01-21 | 2024-09-17 | Teladoc Health, Inc. | Telerobotic system with a dual application screen presentation |
| US8532860B2 (en) | 2011-02-25 | 2013-09-10 | Intellibot Robotics Llc | Methods and systems for automatically yielding to high-priority traffic |
| US20140139616A1 (en) | 2012-01-27 | 2014-05-22 | Intouch Technologies, Inc. | Enhanced Diagnostics for a Telepresence Robot |
| US8836751B2 (en) | 2011-11-08 | 2014-09-16 | Intouch Technologies, Inc. | Tele-presence system with a user interface that displays different communication links |
| US9344606B2 (en) | 2012-01-24 | 2016-05-17 | Radical Switchcam Llc | System and method for compiling and playing a multi-channel video |
| US8902278B2 (en) | 2012-04-11 | 2014-12-02 | Intouch Technologies, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US10152467B2 (en) | 2012-08-13 | 2018-12-11 | Google Llc | Managing a sharing of media content among client computers |
- 2008
- 2008-07-11USUS12/218,258patent/US9842192B2/enactiveActive
- 2009
- 2009-07-09JPJP2011517634Apatent/JP2011528570A/enactivePending
- 2009-07-09CNCN2009801265967Apatent/CN102089751A/enactivePending
- 2009-07-09WOPCT/US2009/050170patent/WO2010006211A1/enactiveApplication Filing
- 2009-07-09CNCN201710033805.XApatent/CN106956269A/enactivePending
- 2009-07-09KRKR1020167016441Apatent/KR20160077226A/ennot_activeCeased
- 2009-07-09EPEP09795215.4Apatent/EP2300930B1/enactiveActive
- 2009-07-09KRKR1020107029377Apatent/KR20110042269A/ennot_activeCeased
- 2009-07-09KRKR1020177023716Apatent/KR102110291B1/enactiveActive
- 2015
- 2015-05-20JPJP2015102477Apatent/JP2015226977A/enactivePending
- 2017
- 2017-12-11USUS15/837,813patent/US10878960B2/enactiveActive
- 2018
- 2018-01-19JPJP2018006992Apatent/JP6889669B2/enactiveActive
- 2020
- 2020-12-28USUS17/134,805patent/US20210366605A1/ennot_activeAbandoned
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11787060B2 (en) | 2008-03-20 | 2023-10-17 | Teladoc Health, Inc. | Remote presence system mounted to operating room hardware |
| US10878960B2 (en) | 2008-07-11 | 2020-12-29 | Teladoc Health, Inc. | Tele-presence robot system with multi-cast features |
| US11798683B2 (en) | 2010-03-04 | 2023-10-24 | Teladoc Health, Inc. | Remote presence system including a cart that supports a robot face and an overhead camera |
| US9264664B2 (en) | 2010-12-03 | 2016-02-16 | Intouch Technologies, Inc. | Systems and methods for dynamic bandwidth allocation |
| US10399223B2 (en) | 2011-01-28 | 2019-09-03 | Intouch Technologies, Inc. | Interfacing with a mobile telepresence robot |
| US11289192B2 (en) | 2011-01-28 | 2022-03-29 | Intouch Technologies, Inc. | Interfacing with a mobile telepresence robot |
| US12224059B2 (en) | 2011-02-16 | 2025-02-11 | Teladoc Health, Inc. | Systems and methods for network-based counseling |
| US9251313B2 (en) | 2012-04-11 | 2016-02-02 | Intouch Technologies, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US11862302B2 (en) | 2017-04-24 | 2024-01-02 | Teladoc Health, Inc. | Automated transcription and documentation of tele-health encounters |
| US11742094B2 (en) | 2017-07-25 | 2023-08-29 | Teladoc Health, Inc. | Modular telehealth cart with thermal imaging and touch screen user interface |
| US11636944B2 (en) | 2017-08-25 | 2023-04-25 | Teladoc Health, Inc. | Connectivity infrastructure for a telehealth platform |
| US11389064B2 (en) | 2018-04-27 | 2022-07-19 | Teladoc Health, Inc. | Telehealth cart that supports a removable tablet with seamless audio/video switching |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102110291B1 (en) | 2020-05-13 |
| CN106956269A (en) | 2017-07-18 |
| EP2300930A4 (en) | 2013-05-08 |
| US20100010673A1 (en) | 2010-01-14 |
| CN102089751A (en) | 2011-06-08 |
| JP2015226977A (en) | 2015-12-17 |
| EP2300930A1 (en) | 2011-03-30 |
| JP6889669B2 (en) | 2021-06-18 |
| KR20160077226A (en) | 2016-07-01 |
| WO2010006211A1 (en) | 2010-01-14 |
| JP2011528570A (en) | 2011-11-24 |
| US20210366605A1 (en) | 2021-11-25 |
| KR20170100069A (en) | 2017-09-01 |
| KR20110042269A (en) | 2011-04-26 |
| US9842192B2 (en) | 2017-12-12 |
| US20180286512A1 (en) | 2018-10-04 |
| JP2018075713A (en) | 2018-05-17 |
| US10878960B2 (en) | 2020-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20220250233A1 (en) | Robot user interface for telepresence robot system | |
| US10878960B2 (en) | Tele-presence robot system with multi-cast features | |
| US11389962B2 (en) | Telepresence robot system that can be accessed by a cellular phone | |
| US20210365006A1 (en) | Tele-presence robot system with software modularity, projector and laser pointer | |
| US7761185B2 (en) | Remote presence display through remotely controlled robot | |
| US9610685B2 (en) | Graphical interface for a remote presence system | |
| US20060259193A1 (en) | Telerobotic system with a dual application screen presentation | |
| US20120072024A1 (en) | Telerobotic system with dual application screen presentation | |
| HK1167189A (en) | Tele-presence robot system with software modularity, projector and laser pointer | |
| HK1167189B (en) | Tele-presence robot system with software modularity, projector and laser pointer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase | Free format text:ORIGINAL CODE: 0009012 | |
| 17P | Request for examination filed | Effective date:20101216 | |
| AK | Designated contracting states | Kind code of ref document:A1 Designated state(s):AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR | |
| AX | Request for extension of the european patent | Extension state:AL BA RS | |
| DAX | Request for extension of the european patent (deleted) | ||
| REG | Reference to a national code | Ref country code:HK Ref legal event code:DE Ref document number:1154297 Country of ref document:HK | |
| A4 | Supplementary search report drawn up and despatched | Effective date:20130409 | |
| RIC1 | Information provided on ipc code assigned before grant | Ipc:G06F 15/16 20060101AFI20130403BHEP | |
| 17Q | First examination report despatched | Effective date:20131218 | |
| GRAP | Despatch of communication of intention to grant a patent | Free format text:ORIGINAL CODE: EPIDOSNIGR1 | |
| INTG | Intention to grant announced | Effective date:20150216 | |
| GRAS | Grant fee paid | Free format text:ORIGINAL CODE: EPIDOSNIGR3 | |
| GRAA | (expected) grant | Free format text:ORIGINAL CODE: 0009210 | |
| AK | Designated contracting states | Kind code of ref document:B1 Designated state(s):AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR | |
| REG | Reference to a national code | Ref country code:GB Ref legal event code:FG4D | |
| REG | Reference to a national code | Ref country code:AT Ref legal event code:REF Ref document number:734332 Country of ref document:AT Kind code of ref document:T Effective date:20150715 Ref country code:CH Ref legal event code:EP | |
| REG | Reference to a national code | Ref country code:IE Ref legal event code:FG4D | |
| REG | Reference to a national code | Ref country code:DE Ref legal event code:R096 Ref document number:602009031982 Country of ref document:DE | |
| REG | Reference to a national code | Ref country code:AT Ref legal event code:MK05 Ref document number:734332 Country of ref document:AT Kind code of ref document:T Effective date:20150701 | |
| REG | Reference to a national code | Ref country code:NL Ref legal event code:MP Effective date:20150701 | |
| REG | Reference to a national code | Ref country code:LT Ref legal event code:MG4D | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:LV Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:NO Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20151001 Ref country code:GR Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20151002 Ref country code:LT Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:FI Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:PT Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20151102 Ref country code:AT Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:HR Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:PL Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:SE Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:IS Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20151101 Ref country code:ES Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| REG | Reference to a national code | Ref country code:CH Ref legal event code:PL | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:MC Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| REG | Reference to a national code | Ref country code:DE Ref legal event code:R097 Ref document number:602009031982 Country of ref document:DE | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:SK Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:IT Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:LI Free format text:LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date:20150731 Ref country code:CZ Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:EE Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:CH Free format text:LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date:20150731 Ref country code:DK Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| PLBE | No opposition filed within time limit | Free format text:ORIGINAL CODE: 0009261 | |
| STAA | Information on the status of an ep patent application or granted ep patent | Free format text:STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:RO Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| 26N | No opposition filed | Effective date:20160404 | |
| REG | Reference to a national code | Ref country code:FR Ref legal event code:PLFP Year of fee payment:8 | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:SI Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:BE Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:MT Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:BG Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:SM Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:HU Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date:20090709 | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:CY Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 Ref country code:NL Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| REG | Reference to a national code | Ref country code:FR Ref legal event code:PLFP Year of fee payment:9 | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:TR Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:LU Free format text:LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date:20150709 | |
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] | Ref country code:MK Free format text:LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date:20150701 | |
| REG | Reference to a national code | Ref country code:FR Ref legal event code:PLFP Year of fee payment:10 | |
| REG | Reference to a national code | Ref country code:HK Ref legal event code:WD Ref document number:1154297 Country of ref document:HK | |
| REG | Reference to a national code | Ref country code:GB Ref legal event code:732E Free format text:REGISTERED BETWEEN 20230803 AND 20230809 | |
| REG | Reference to a national code | Ref country code:DE Ref legal event code:R081 Ref document number:602009031982 Country of ref document:DE Owner name:TELADOC HEALTH, INC., PURCHASE, US Free format text:FORMER OWNER: INTOUCH TECHNOLOGIES, INC., GOLETA, CALIF., US | |
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] | Ref country code:DE Payment date:20240730 Year of fee payment:16 Ref country code:IE Payment date:20240718 Year of fee payment:16 | |
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] | Ref country code:GB Payment date:20240724 Year of fee payment:16 | |
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] | Ref country code:FR Payment date:20240725 Year of fee payment:16 |