GEBIET DER ERFINDUNG
Die vorliegende Erfindung betrifft im Allgemeinen eine verstaubare Lenksäule für Kraftfahrzeuge und insbesondere eine verstaubare Lenksäule für autonome Fahrzeuge.
ALLGEMEINER STAND DER TECHNIK
Verschiedene Arten von verstaubaren Lenkrädern wurden bisher entwickelt. Im Allgemeinen bewegen sich verstaubare Lenkräder zwischen einer Einsatzposition und einer verstauten Position. Derartige Lenksysteme wurden für autonome Fahrzeuge vorgeschlagen.
KURZDARSTELLUNG DER ERFINDUNG
Ein Aspekt der vorliegenden Offenbarung ist eine Lenksäule für autonome Kraftfahrzeuge. Die Lenksäule beinhaltet ein statisches Element und eine drehbare untere (erste) Säule. Ein Motor nimmt die untere Säule betriebsfähig in Eingriff, wodurch die Betätigung des Motors bewirkt, dass sich die untere Säule dreht. Der Motor weist einen gesperrten Zustand auf, in dem der Motor eine Drehung der unteren Säule blockiert oder verhindert. Die Lenksäule beinhaltet einen Winkelpositionssensor, der dazu konfiguriert ist, ein Lenkbefehlssignal zu erzeugen, das einer Winkelposition der unteren Säule entspricht. Die Lenksäule beinhaltet ferner eine drehbare innere (zweite) Säule und eine drehbare obere (dritte) Säule, die bewegbar (z. B. teleskopisch) mit der unteren Säule und der inneren Säule in Eingriff tritt, wodurch die obere Säule entlang einer Achse der Lenksäule (z. B. axial) relativ zu der unteren Säule und relativ zu der inneren Säule bewegbar ist, wodurch sich die obere Säule zwischen einer eingezogenen Position und einer Einsatzposition bewegt. Die obere Säule ist relativ zu der inneren Säule durch eine Keilverzahnung oder eine andere geeignete Anordnung drehfest, wodurch sich die obere Säule und die innere Säule zusammen um die Achse der Lenksäule drehen. Die obere Säule und die untere Säule sind betriebsfähig (z. B. über Gewinde) miteinander verbunden, sodass eine Betätigung des Motors eine Drehung der unteren Säule relativ zu der oberen Säule bewirkt und eine lineare Bewegung der oberen Säule relativ zu der unteren Säule zwischen der eingezogenen Position und der Einsatzposition bewirkt. Die Lenksäule beinhaltet ferner ein Lenkrad, das an der oberen Säule befestigt ist. Die Lenksäule beinhaltet ferner eine angetriebene Arretierung, die dazu konfiguriert ist, die innere Säule an der unteren Säule zu arretieren, wenn sich die angetriebene Arretierung in einer ersten Position befindet. Die angetriebene Arretierung ist dazu konfiguriert, die innere Säule an dem statischen Element zu arretieren, wenn sich die angetriebene Arretierung in einer zweiten Position befindet. Die Lenksäule definiert: 1) eine autonome Konfiguration, in der sich die obere Säule und das Lenkrad in der verstauten Position befinden, sich die angetriebene Arretierung in der ersten Position befindet und sich der Motor in einem gesperrten Zustand befindet, um eine Drehung der unteren Säule zu verhindern, und: 2) eine manuelle Lenkkonfiguration, in der sich die obere Säule in der Einsatzposition befindet und sich die angetriebene Arretierung in der zweiten Position befindet, um eine Drehung der inneren Säule relativ zu dem statischen Element zu verhindern. Der Sensor ist dazu konfiguriert, ein Lenkbefehlssignal zu erzeugen, das einer Winkelposition der unteren Säule, der oberen Säule und des Lenkrads entspricht, wenn sich die Lenksäule in der manuellen Lenkkonfiguration befindet.
Ausführungsformen des ersten Aspekts der Offenbarung können ein beliebiges oder eine Kombination der folgenden Merkmale beinhalten:
- • Die innere Säule kann drehbar mit dem statischen Element verbunden sein.
- • Die innere Säule kann eine Welle beinhalten, die sich durch eine Öffnung in der unteren Säule erstreckt.
- • Die untere Säule kann nach außen gewandte Zahnradzähne beinhalten.
- • Der Motor kann eine rotierende Ausgangswelle mit einem an der Ausgangswelle montierten Antriebszahnrad beinhalten.
- • Das Antriebszahnrad kann die nach außen gewandten Zahnradzähne der unteren Säule in Eingriff nehmen, wodurch sich die Ausgangswelle dreht, wenn der Motor betätigt wird, um dadurch die untere Säule zu drehen.
- • Der Winkelpositionssensor kann mit der Ausgangswelle des Motors wirkverbunden sein, wodurch der Winkelpositionssensor ein Signal erzeugt, das einer Winkelposition der Ausgangswelle entspricht.
- • Die innere Säule kann nach außen gewandte Zahnradzähne beinhalten.
- • Die angetriebene Arretierung kann ein Arretierungselement beinhalten, das gleichzeitig die nach außen gewandten Zahnradzähne der unteren Säule und die nach außen gewandten Zahnradzähne der inneren Säule in Eingriff nimmt, wenn sich die angetriebene Arretierung in der ersten Position befindet, um die untere Säule drehbar an der inneren Säule zu arretieren.
- • Das Arretierungselement kann gleichzeitig die nach außen gewandten Zahnradzähne der inneren Säule und eine Arretierungsfläche des statischen Elements in Eingriff nehmen, wenn sich die angetriebene Arretierung in der zweiten Position befindet, um eine Drehung der inneren Säule relativ zu dem statischen Element zu verhindern.
- • Die angetriebene Arretierung kann einen linearen Elektromagneten umfassen, der das Arretierungselement zwischen der ersten und der zweiten Position verschiebt, wenn die angetriebene Arretierung betätigt wird.
- • Die Welle der inneren Säule kann einen ersten Keilabschnitt beinhalten, der axial und verschiebbar in einen entsprechenden zweiten Keilabschnitt der oberen Säule eingreift, wodurch: 1) die innere Säule und die obere Säule relativ zueinander drehfest sind und: 2) die innere Säule und die zweite Säule axial relativ zueinander teleskopieren.
Ein weiterer Aspekt der vorliegenden Offenbarung ist ein autonomes Fahrzeug, das ein Steuersystem beinhaltet, das dazu konfiguriert ist, Lenkbefehle zu erzeugen, wenn sich das autonome Fahrzeug in einem autonomen Betriebsmodus befindet. Das Steuersystem ist dazu konfiguriert, Lenkbefehle von einem Fahrzeugführer zu nutzen, wenn sich das autonome Fahrzeug in einem manuellen Betriebsmodus befindet. Das autonome Fahrzeug beinhaltet eine Lenksäule, die ein statisches Element und eine drehbare erste Säule aufweist. Die Lenksäule beinhaltet ferner einen Motor, der mit dem Steuersystem wirkverbunden ist, wobei der Motor die erste Säule mechanisch in Eingriff nimmt, sodass eine Betätigung des Motors bewirkt, dass sich die erste Säule dreht. Ein Winkelpositionssensor ist dazu konfiguriert, ein Lenkbefehlssignal an das Steuersystem zu erzeugen, das einer Winkelposition der ersten Säule entspricht, wenn sich das autonome Fahrzeug im manuellen Betriebsmodus befindet. Die Lenksäule beinhaltet ferner eine drehbare zweite Säule und eine drehbare dritte Säule. Die dritte Säule ist bewegbar an die erste Säule und die zweite Säule gekoppelt, wodurch die dritte Säule entlang einer Achse der Lenksäule relativ zu der ersten Säule und der zweiten Säule zwischen einer eingezogenen Position und einer Einsatzposition bewegbar ist. Die dritte Säule ist relativ zu der zweiten Säule drehfest, wodurch sich die dritte Säule und die zweite Säule zusammen drehen. Die dritte Säule und die erste Säule sind betriebsfähig miteinander verbunden, sodass eine Betätigung des Motors eine Drehung der ersten Säule relativ zu der dritten Säule bewirkt und eine axiale Bewegung der dritten Säule relativ zu der ersten Säule zwischen der eingezogenen Position und der Einsatzposition bewirkt. Die dritte Säule beinhaltet ein manuelles Lenkeingabeelement, wie etwa ein Lenkrad. Die Lenksäule beinhaltet ferner eine angetriebene Arretierung, die dazu konfiguriert ist, die zweite Säule an der ersten Säule zu arretieren, wenn sich die angetriebene Arretierung in einer ersten Position befindet. Die angetriebene Arretierung ist dazu konfiguriert, die zweite Säule an dem statischen Element zu arretieren, wenn sich die angetriebene Arretierung in einer zweiten Position befindet. Die Lenksäule definiert: 1) eine autonome Konfiguration, in der sich die dritte Säule in der verstauten Position befindet, sich die angetriebene Arretierung in der ersten Position befindet und der Motor eine Drehung der ersten Säule verhindert, und: 2) eine manuelle Lenkkonfiguration, in der sich die dritte Säule in der Einsatzposition befindet und sich die angetriebene Arretierung in der zweiten Position befindet, um eine Drehung der zweiten Säule relativ zu dem statischen Element zu verhindern. Der Sensor ist dazu konfiguriert, ein Lenkbefehlssignal zu erzeugen, das einer Winkelposition der ersten Säule, der dritten Säule und des manuellen Lenkeingabeelements entspricht. Das Steuersystem ist dazu konfiguriert, den Motor und die angetriebene Arretierung zu betätigen, um die Lenksäule zwischen der autonomen Konfiguration und der manuellen Lenkkonfiguration zu verschieben.
Ausführungsformen des zweiten Aspekts der Offenbarung können ein beliebiges oder eine Kombination der folgenden Merkmale beinhalten:
- • Die erste und dritte Säule können durch Gewinde miteinander verbunden sein.
- • Die zweite Säule kann eine Welle beinhalten, die sich durch eine Öffnung in der ersten Säule erstreckt, um die zweite Säule und die erste Säule drehbar miteinander zu verbinden.
- • Die erste und zweite Säule können nach außen gewandte Zahnradzähne beinhalten.
- • Der Motor kann eine drehende Ausgangswelle mit einem an der Ausgangswelle montierten Antriebszahnrad beinhalten, wobei das Antriebszahnrad die nach außen gewandten Zahnradzähne der ersten Säule in Eingriff nimmt, wodurch eine Betätigung des Motors die untere Säule dreht.
- • Die angetriebene Arretierung kann ein Arretierungselement beinhalten, das gleichzeitig die nach außen gewandten Zahnradzähne der ersten Säule und die nach außen gewandten Zahnradzähne der zweiten Säule in Eingriff nimmt, wenn sich die angetriebene Arretierung in der ersten Position befindet, um die erste Säule drehbar an der zweiten Säule zu arretieren.
- • Der Winkelpositionssensor kann mit der Ausgangswelle des Motors wirkverbunden sein, wodurch der Winkelpositionssensor ein Signal an das Steuersystem erzeugt, das einer Winkelposition der Ausgangswelle entspricht.
- • Das Arretierungselement kann dazu konfiguriert sein, gleichzeitig die nach außen gewandten Zahnradzähne der zweiten Säule und eine Arretierungsfläche des statischen Elements in Eingriff zu nehmen, wenn sich die angetriebene Arretierung in der zweiten Position befindet, um eine Drehung der zweiten Säule relativ zu dem statischen Element zu verhindern.
- • Die angetriebene Arretierung kann einen linearen Elektromagneten umfassen, der das Arretierungselement zwischen der ersten und der zweiten Position verschiebt, wenn die angetriebene Arretierung betätigt wird.
- • Die erste Säule kann eine untere Säule umfassen.
- • Die zweite Säule kann eine innere Säule umfassen.
- • Die dritte Säule kann eine obere Säule umfassen.
- • Das manuelle Lenkeingabeelement kann ein Lenkrad umfassen.
- • Die innere Säule kann zumindest teilweise innerhalb der unteren Säule und der oberen Säule angeordnet sein.
- • Die obere Säule kann die innere Säule und die untere Säule teleskopisch in Eingriff nehmen.
- • Die obere Säule kann sich bei einer Betätigung des Motors linear entlang der Achse der Lenksäule verlagern.
Ein weiterer Aspekt der vorliegenden Offenbarung ist eine Lenksäule für autonome Kraftfahrzeuge, die ein statisches Element und eine drehbare untere (erste) Säule beinhaltet. Die Lenksäule beinhaltet ferner einen Motor, der dazu konfiguriert ist, die untere Säule zu drehen. Die Lenksäule beinhaltet ferner eine drehbare innere (zweite) Säule und eine drehbare obere (dritte) Säule, die mit der unteren Säule und der inneren Säule wirkverbunden ist und axial entlang einer Achse der Lenksäule relativ zu der unteren Säule und der inneren Säule bewegbar ist. Die obere Säule und die innere Säule drehen sich zusammen. Die obere Säule und die untere Säule sind betriebsfähig miteinander verbunden, sodass eine motorgetriebene Drehung der unteren Säule relativ zu der oberen Säule eine Ein- und Auswärtsbewegung der oberen Säule relativ zu der unteren Säule zwischen der eingezogenen Position und der Einsatzposition bewirkt. Die obere Säule kann ein Lenkrad beinhalten. Die Lenksäule beinhaltet ferner eine Arretierung, die dazu konfiguriert ist, die innere Säule an der unteren Säule zu arretieren, wenn sich die Arretierung in einer ersten Position befindet. Die Arretierung ist dazu konfiguriert, die innere Säule an dem statischen Element zu arretieren, wenn sich die Arretierung in einer zweiten Position befindet. Die Lenksäule definiert: 1) eine autonome Konfiguration, in der sich die obere Säule und das Lenkrad in der verstauten Position befinden, sich die Arretierung in der ersten Position befindet und der Motor abgeschaltet ist, um eine Drehung der unteren Säule zu verhindern oder zu blockieren, und: 2) eine manuelle Lenkkonfiguration, in der sich die obere Säule und das Lenkrad in der Einsatzposition befinden und sich die Arretierung in der zweiten Position befindet, um eine Drehung der inneren Säule relativ zu dem statischen Element zu verhindern.
Ausführungsformen des dritten Aspekts der Offenbarung können ein beliebiges oder eine Kombination der folgenden Merkmale beinhalten:
- • Die Lenksäule kann optional einen Winkelpositionssensor beinhalten, der dazu konfiguriert ist, ein Lenkbefehlssignal zu erzeugen, das einer Winkelposition der unteren Säule entspricht.
- • Der Sensor kann dazu konfiguriert sein, ein Lenkbefehlssignal zu erzeugen, das einer Winkelposition der unteren Säule, der oberen Säule und des Lenkrads entspricht.
- • Die Arretierung kann einen angetriebenen Aktor und ein bewegbares Arretierungselement beinhalten, das gleichzeitig die untere Säule und die innere Säule in Eingriff nimmt, wenn sich die angetriebene Arretierung in der ersten Position befindet, um die untere Säule drehbar an der inneren Säule zu arretieren.
Diese und andere Aspekte, Aufgaben und Merkmale der vorliegenden Offenbarung sind für den Fachmann nach der Lektüre der folgenden Beschreibung, der Patentansprüche und der beigefügten Zeichnungen verständlich und nachvollziehbar.
Figurenliste
In den Zeichnungen gilt:
- 1 ist eine teilweise fragmentarische schematische Ansicht einer Lenksäule in einer verstauten/eingezogenen/autonomen Konfiguration oder einem verstauten/eingezogenen/autonomen Modus;
- 2 ist eine teilweise fragmentarische schematische Ansicht einer Lenksäule in einer ausgefahrenen manuellen Einsatzkonfiguration oder einem ausgefahrenen manuellen Einsatzmodus;
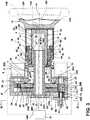
- 3 ist eine teilweise schematische Querschnittsansicht der Lenksäule der1 und2 in einer ausgefahrenen manuellen Einsatzkonfiguration;
- 3A ist eine teilweise schematische Querschnittsansicht der Lenksäule der3 entlang der Linie IIIA-IIIA der3;
- 4 ist eine teilweise schematische Ansicht der Lenksäule der3 entlang der Linie IV-IV der3;
- 5 ist eine teilweise schematische Ansicht eines Abschnitts der Lenksäule der3;
- 6 ist eine teilweise schematische Ansicht eines Abschnitts der Lenksäule der3;
- 7 ist eine teilweise schematische Querschnittsansicht der Lenksäule der1 und2, die die Lenksäule in einer autonomen (eingezogenen) Konfiguration oder einem autonomen Modus zeigt;
- 8 ist eine teilweise schematische Querschnittsansicht der Lenksäule der1 und2, die das Ausfahren und Einziehen der Lenksäule zeigt;
- 9 ist eine teilweise schematische Querschnittsansicht der Lenksäule der1 und2, die die Lenksäule in einer manuellen (ausgefahrenen) Lenkkonfiguration oder einem manuellen Lenkmodus zeigt; und
- 10 ist ein Blockdiagramm eines autonomen Fahrzeugs, das die Lenksäule der1-9 beinhaltet.
DETAILLIERTE BESCHREIBUNG DER BEVORZUGTEN AUSFÜHRUNGSFORMEN
Für die Zwecke der Beschreibung in dieser Schrift beziehen sich die Ausdrücke „oberes“, „unteres“, „rechtes“, „linkes“, „hinteres“, „vorderes“, „vertikales“, „horizontales“ und Ableitungen davon auf die Offenbarung in ihrer Ausrichtung in1. Dabei versteht es sich jedoch, dass die Offenbarung verschiedene alternative Ausrichtungen und Schrittabfolgen annehmen kann, sofern nicht ausdrücklich das Gegenteil vorgegeben ist. Zudem versteht es sich, dass die in den beigefügten Zeichnungen veranschaulichten und in der folgenden Beschreibung beschriebenen spezifischen Vorrichtungen und Prozesse lediglich beispielhafte Ausführungsformen der in den beigefügten Patentansprüchen definierten erfindungsgemäßen Konzepte sind. Somit sind spezifische Abmessungen und andere physische Eigenschaften im Zusammenhang mit den in dieser Schrift offenbarten Ausführungsformen nicht als einschränkend zu betrachten, sofern die Patentansprüche nicht ausdrücklich etwas anderes besagen.
Unter Bezugnahme auf die1 und2 beinhaltet ein autonomes Fahrzeug1 gemäß einem Aspekt der vorliegenden Offenbarung eine Lenksäule10, die an einer Fahrzeugstruktur2 montiert ist. Die Lenksäule10 kann zwischen der autonomen oder verstauten Konfiguration der1 und der manuellen oder ausgefahrenen Lenkkonfiguration der2 verschoben werden. Die Lenksäule10 kann in die verstaute Konfiguration der1 verschoben sein, wenn sich das autonome Fahrzeug1 in einem autonomen Modus befindet, in dem der Benutzer das Lenkrad12 nicht manuell dreht, um Lenkeingabe bereitzustellen. Wenn sich das autonome Fahrzeug1 jedoch in der ausgefahrenen manuellen (Einsatz-) Lenkkonfiguration der2 befindet, kann ein Benutzer das Lenkrad12 ergreifen, um das Lenkrad12 zu drehen und dem autonomen Fahrzeug1 Lenkeingaben bereitzustellen.
Unter weiterer Bezugnahme auf3 beinhaltet die Lenksäule10 ein statisches Element3, das an einer Fahrzeugstruktur2 befestigt sein kann, und eine drehbare untere (erste) Säule4. Ein angetriebener Aktor, wie etwa ein Motor5, ist dazu konfiguriert, die untere Säule4 betriebsfähig in Eingriff zu nehmen, sodass eine Betätigung des Motors5 bewirkt, dass sich die untere Säule4 um eine Achse „A“ der Lenksäule10 dreht. Wie nachstehend ausführlicher erörtert, weist der Motor5 einen gesperrten Zustand auf, in dem der Motor5 eine Drehung der unteren Säule4 verhindert oder blockiert. Die Lenksäule10 beinhaltet ferner einen Winkelpositionssensor6, der optional einen Drehgeber des Motors5 umfassen kann. Der Winkelpositionssensor6 ist dazu konfiguriert, ein Lenkbefehlssignal an eine Steuerung15 des autonomen Fahrzeugs1 zu erzeugen, das einer Winkelposition der unteren Säule4 entspricht. Eine Benutzereingabevorrichtung14 (oder 14A) kann mit der Steuerung15 wirkverbunden sein, um der Steuerung15 Benutzerbefehle bereitzustellen. Die Lenksäule10 beinhaltet ferner eine drehbare innere (zweite) Säule7 und eine drehbare obere (dritte) Säule8. Das Lenkrad12 kann an der oberen Säule8 befestigt sein. Die obere Säule8 nimmt die untere Säule4 und die innere Säule7 teleskopisch (bewegbar) in Eingriff, wodurch die obere Säule8 axial entlang der Achse A der Lenksäule10 relativ zu der unteren Säule4 und relativ zu der inneren Säule7 zwischen einer eingezogenen (autonomen) Position (1) und einer ausgefahrenen manuellen Einsatzposition (2) bewegbar ist. Die obere Säule8 ist relativ zu der inneren Säule7 durch eine keilartige Verbindung9 (siehe auch3A) drehfest, wodurch sich die obere Säule8 und die innere Säule7 zusammen um die Achse A der Lenksäule10 drehen. Die obere Säule8 und die untere Säule4 können durch Gewinde16 und17 gewindemäßig miteinander verbunden sein, sodass eine Betätigung des Motors5 eine Drehung der unteren Säule4 relativ zu der oberen Säule8 bewirkt und eine lineare Bewegung (z. B. Pfeil B;1 und2) der oberen Säule8 relativ zu der unteren Säule4 zwischen der eingezogenen Position (1) und der Einsatzposition (2) bewirkt.
Die Lenksäule10 beinhaltet ferner eine angetriebene Arretierung11, die dazu konfiguriert ist, die innere Säule7 betriebsfähig an der unteren Säule4 zu arretieren, wenn sich die angetriebene Arretierung11 in einer ersten Position (3) befindet. Die angetriebene Arretierung11 ist ferner dazu konfiguriert, die innere Säule7 an dem statischen Element3 zu arretieren, wenn sich die angetriebene Arretierung11 in einer zweiten Position (8) befindet. Die Lenksäule10 definiert eine autonome Konfiguration (1 und7), in der sich die obere Säule8 und das Lenkrad12 in der verstauten Position befinden, sich die angetriebene Arretierung11 in der ersten Position befindet und der Motor5 in einem gesperrten oder abgeschalteten Zustand ist, um eine Drehung der unteren Säule4 zu verhindern oder zu blockieren. Die Lenksäule10 definiert ferner eine manuelle Lenkkonfiguration (2 und9), in der sich die obere Säule8 in der Einsatzposition befindet, sich die angetriebene Arretierung11 in der zweiten Position befindet, um eine Drehung der inneren Säule7 relativ zu dem statischen Element3 zu verhindern, und wobei der Sensor6 ein Lenkbefehlssignal an die Steuerung15 erzeugt, das einer Winkelposition der unteren Säule4, der oberen Säule8 und des Lenkrads12 entspricht.
Unter erneuter Bezugnahme auf3 kann das statische Element3 Komponenten oder Teile3A-3F umfassen, die durch Gewindebefestigungselemente (nicht gezeigt) oder eine andere geeignete Verbindungsanordnung starr miteinander verbunden sein können. Das statische Element3 kann starr an der Fahrzeugstruktur2 befestigt sein. Das statische Element3 beinhaltet eine Arretierungsfläche18, die Zahnradzähne umfassen kann, die durch Zahnradzähne19 eines Arretierungselements20 in Eingriff genommen werden. Die angetriebene Arretierung11 kann einen Elektromagneten21 beinhalten, der mit der Steuerung15 wirkverbunden ist. Der Elektromagnet21 kann dazu konfiguriert sein, eine Welle22 linear zu bewegen, um dadurch das Arretierungselement20 axial in entgegengesetzten Richtungen entlang der Achse „AI“ der angetriebenen Arretierung11 zwischen der ersten Position (3,7 und9) und einer zweiten Position (8) zu verschieben. Die untere Säule4 beinhaltet einen scheibenförmigen Abschnitt23, der nach außen gewandte Zahnräder24 aufweist, und die innere Säule7 beinhaltet einen scheibenförmigen Abschnitt25, der nach außen gewandte Zahnräder26 aufweist. Reibungsarme Lager29A sind zwischen dem scheibenförmigen Abschnitt25 und dem feststehenden Abschnitt3A angeordnet und reibungsarme Lager29B sind zwischen den scheibenförmigen Abschnitten23 und25 angeordnet. Reibungsarme Lager29C sind zwischen dem scheibenförmigen Abschnitt23 und dem feststehenden Abschnitt3F angeordnet.
Wenn sich das Arretierungselement20 der angetriebenen Arretierung11 in der ersten Position befindet, nehmen die Zahnräder19 des Arretierungselements20 gleichzeitig in die Zahnräder24 der unteren Säule4 und die Zahnräder26 der inneren Säule7 in Eingriff, um dadurch die untere Säule4 drehfest an der inneren Säule7 zu arretieren. Die angetriebene Arretierung11 ist mit der Steuerung15 wirkverbunden, um die angetriebene Arretierung11 aus der ersten Position in die zweite Position und aus der zweiten Position in die erste Position zu verschieben. Die Welle22 kann im Allgemeinen zylindrisch sein mit einem ersten Abschnitt22A mit kleinerem Durchmesser, einem zweiten Abschnitt22C mit größerem Durchmesser und einer Querstufe oder einem Ansatz22B, die bzw. der sich zwischen dem ersten Abschnitt22A und dem zweiten Abschnitt22C erstreckt. Das Arretierungselement20 kann eine ringförmige Nut22D beinhalten, die einen C-Clip13 aufnimmt, um das Arretierungselement an dem ersten Abschnitt22A zwischen dem Ansatz22B und dem C-Clip13 festzuhalten. Das Arretierungselement20 kann die Form eines Zahnrads aufweisen, das drehbar an dem ersten Abschnitt22A der Welle22 angeordnet ist. Das Arretierungselement20 kann jedoch praktisch jede geeignete Konfiguration aufweisen und kann einstückig mit der Welle22 ausgebildet sein.
Der Elektromotor5 kann einen elektrischen computergesteuerten Schritt- oder Servomotor umfassen, der ein drehendes Element, wie etwa die Welle27, und ein Zahnrad28, das auf der Welle27 montiert ist, aufweist. Der Motor5 kann betätigt werden, um eine angetriebene Drehung der Welle27 bereitzustellen, oder abgeschaltet werden, um eine Drehung der Welle27 zu ermöglichen. Der Motor5 kann auch gesperrt sein, um eine Drehung der Welle27 zu verhindern oder zu blockieren. Das Zahnrad28 greift in die Zahnräder24 der unteren Säule4 ein, sodass eine Drehung der Welle27 eine Drehung der unteren Säule4 bewirkt und eine Drehung der unteren Säule4 eine Drehung der Welle27 bewirkt. Der Motor5 ist mit der Steuerung15 wirkverbunden und die Steuerung15 kann den Motor5 betätigen, um dadurch die Welle27 und die untere Säule4 in einer ersten und einer zweiten entgegengesetzten Richtung zu drehen. Wie nachstehend ausführlicher erörtert, bewirkt die Drehung der unteren Säule4 eine axiale Verschiebung der oberen Säule8 und des Lenkrads12, wenn sich das Arretierungselement20 in der zweiten Position (8) befindet, um dadurch die Lenksäule10 zwischen der autonomen und der manuellen Konfiguration (1 und2) zu verschieben (auszufahren und einzuziehen). Wenn sich die Lenksäule10 im autonomen Modus befindet, kann der Motor5 abgeschaltet oder in eine gesperrte Konfiguration geschaltet werden, um eine Drehung der Ausgangswelle27 und der unteren Säule4 zu verhindern oder zu blockieren. Wenn sich die Lenksäule10 in der manuellen Lenkkonfiguration (manueller Lenkmodus) befindet, bewirkt die Drehung des Lenkrads12 eine Drehung der unteren Säule4 und der Welle25 des Motors5, und der Winkelpositionssensor6 stellt der Steuerung15 ein Signal bereit, das den Lenkeingabebefehlen (d. h. der Drehung des Lenkrads12) des Fahrzeugführers entspricht. In der manuellen Lenkkonfiguration/dem manuellen Lenkmodus kann die Steuerung15 den Motor5 selektiv betätigen, um einem Benutzer, der das Lenkrad12 dreht, eine Kraftrückmeldung bereitzustellen.
Unter erneuter Bezugnahme auf3 kann die untere Säule4 eine Öffnung30 durch den scheibenförmigen Abschnitt23 beinhalten, der eine zylindrische Fläche31 der inneren Säule7 verschiebbar in Eingriff nimmt, um dadurch die untere Säule4 und die innere Säule7 drehbar miteinander zu verbinden. Die Öffnung30 und die zylindrische Fläche31 können reibungsarme Lager (z. B. reibungsarme Materialien, Rolllager oder andere geeignete Lageranordnung) umfassen. Das statische Element3 kann eine Öffnung32 beinhalten, die eine zylindrische Fläche31 aufweist, die eine zylindrische Außenfläche33 der inneren Säule7 in Eingriff nimmt, um dadurch die innere Säule7 relativ zu dem statischen Element3 drehbar zu lagern. Die Fläche der Öffnung32 und die Fläche33 können nach Bedarf bei einer konkreten Anwendung reibungsarmes Lagermaterial oder Rolllager (nicht gezeigt) umfassen.
Die innere Säule7 beinhaltet ferner einen Wellenabschnitt34 mit einem inneren Hohlraum oder Durchgang35. Die Außenfläche37 der Welle34 kann einen oder mehrere ebene Flächenabschnitte37A-37D (3A) aufweisen, die entsprechende flache Flächenabschnitte36A-36D der Innenfläche37 der oberen Säule8 verschiebbar in Eingriff nehmen, um einen keilartigen Verbinder9 zu bilden. Der Keilverbinder9 zwischen der inneren Säule7 und der oberen Säule8 ermöglicht eine lineare Bewegung der oberen Säule8 relativ zur inneren Säule7, hält jedoch die obere Säule8 drehfest an der inneren Säule7, sodass sich die obere Säule8 und die innere Säule7 zusammen drehen. Es versteht sich, dass3A schematischer Natur ist und die Lücken zwischen den Flächenabschnitten36A-36D bzw.37A-37D stark vergrößert dargestellt sind, um die Y-Flächen deutlicher zu zeigen. Die Lücken zwischen den Flächenabschnitten36A-36D bzw.37A-37D können sehr klein oder nicht vorhanden sein, sodass die Flächenabschnitte36A-36D jeweils gleichzeitig in die Flächenabschnitte37A-37D eingreifen. Darüber hinaus können die Keilflächen36 und37 praktisch jede beliebige Form/Konfiguration (z. B. Zähne) umfassen, die eine lineare Bewegung der oberen Säule8 relativ zu der inneren Säule7 bereitstellt, während eine Drehung der oberen Säule8 relativ zu der inneren Säule7 im Wesentlichen verhindert (oder gesteuert) wird. Ein Gleitlager38 kann Innengewinde41 (3) beinhalten, die mit Außengewinden42 am Ende39 eines inneren Abschnitts40 der oberen Säule8 in Eingriff stehen, um dadurch das Gleitlager38 an der oberen Säule8 zu sichern. Das Gleitlager38 nimmt eine zylindrische Innenfläche46A einer rohrförmigen Seitenwand46 der unteren Säule4 verschiebbar in Eingriff.
Wie vorstehend erörtert, ermöglicht die keilartige Verbindung9 zwischen der inneren Säule7 und der oberen Säule8, dass sich die obere Säule8 entlang der Achse A relativ zu der inneren Säule7 verlagert. Aufgrund der Konfiguration des Keilelements38 und der Außenfläche36 der inneren Säule7 sind jedoch die innere Säule7 und die obere Säule8 drehbar miteinander verbunden und drehen sich mit der gleichen Winkelgeschwindigkeit.
Innengewinde16 der unteren Säule4 (3) können durch ein Gewindestück43 gebildet sein, das Vorsprünge, wie etwa Stifte44, beinhaltet, die in Öffnungen45 in der rohrförmigen Wand46 der unteren Säule4 eingreifen, um dadurch das Gewindestück43 an der unteren Säule4 zu sichern. Die Innengewinde16 nehmen die Außengewinde17 des inneren Abschnitts40 der oberen Säule8 gewindemäßig in Eingriff. Der innere Abschnitt40 beinhaltet einen Hohlraum47, der das Ende48 der Welle34 der inneren Säule7 über die vorstehend beschriebene Keilverbindung9 verschiebbar aufnimmt. Ein Anschlussstück49 beinhaltet Innengewinde50, die Außengewinde51 des Endabschnitts52 der rohrförmigen Seitenwand der unteren Säule4 in Eingriff nehmen, um dadurch das Anschlussstück49 an der unteren Säule4 zu sichern. Das Anschlussstück49 beinhaltet eine erste Fläche53, die optional eine Innenfläche54 der oberen Säule8 berühren kann, wenn sich die obere Säule8 in der verstauten (eingezogenen) oder autonomen Konfiguration befindet. In einer bevorzugten Ausführungsform stoppt die Steuerung15 jedoch den Motor5, wenn die Lenksäule10 eingezogen ist, bevor die erste Fläche53 die Innenfläche54 berührt. Die obere Säule8 kann einen rohrförmigen äußeren Abdeckungsabschnitt55 beinhalten, der eine Stirnwand56 aufweist, die eine zweite Fläche54 bildet. Das Lenkrad12 kann unter Verwendung eines oder mehrerer Verbinder12C an der oberen Säule8 gesichert sein. Die Verbinder12C können nach Bedarf für eine konkrete Anwendung praktisch beliebige geeignete Befestigungselemente (z. B. Schrauben, Stifte usw.) umfassen. Das Lenkrad12 kann Speichen12A und einen kreisförmigen Rand12B oder eine andere geeignete Konfiguration beinhalten. Im hierin verwendeten Sinne ist „Lenkrad“ jedoch nicht auf eine spezifisch Konfiguration beschränkt, sondern beinhaltet vielmehr eine beliebige Struktur, die dazu konfiguriert ist, von einem Benutzer manuell ergriffen zu werden, um eine manuelle Benutzerlenkungseingabe (Befehle) zu ermöglichen. Das Lenkrad12 ist an der oberen Säule8 befestigt und dreht und verlagert sich mit der oberen Säule8. Eine Drucktaste oder eine andere Benutzereingabevorrichtung14A kann an dem Lenkrad12 positioniert sein. Optionale elektrische Leitungen14B können sich von der Benutzereingabevorrichtung14A durch den Hohlraum47 der oberen Säule8 und durch den Durchgang35 der inneren Säule7 zur Steuerung15 erstrecken. Die Benutzereingabevorrichtung14A kann eine Eingabevorrichtung zum Einziehen oder Ausfahren der Lenksäule10 umfassen. Die Benutzereingabevorrichtung14A kann jedoch auch verschiedene Eingaben zum Steuern der Fahrzeuggeschwindigkeit, von Audio- und/ oder Videosystemen des Fahrzeugs, Mobiltelefonen usw. umfassen.
Unter Bezugnahme auf die4-6 können der Motor5 und die angetriebene Arretierung11 an verschiedenen Stellen relativ zu der Achse A der Lenksäule10 positioniert sein. Somit ist die Lenksäule10 nicht auf die Konfiguration der4 beschränkt, sondern kann stattdessen praktisch jede geeignete Konfiguration annehmen.
Unter Bezugnahme auf7 befinden sich die obere Säule8 und das Lenkrad12 in einer eingezogenen oder verstauten Konfiguration, wenn sich die Lenksäule10 in der autonomen oder verstauten Konfiguration befindet, und die Zahnräder19 des Arretierungselements20 nehmen gleichzeitig die Zahnräder24 und26 der unteren Säule4 bzw. der inneren Säule7 bei 19A und 19B in Eingriff, sodass die untere Säule4 und die innere Säule7 relativ zueinander drehbar arretiert sind. Eine Endfläche48A der inneren Säule7 kann optional die Fläche47A der oberen Säule8 berühren, um einen „harten“ mechanischen Anschlag bereitzustellen, wenn sie verstaut ist. Alternativ können andere Flächen einen mechanischen Anschlag bilden. Weiterhin kann die Steuerung15 die Position der Welle27 über den Sensor6 bestimmen, und die Steuerung15 kann bewirken, dass der Motor5 die Drehung der Welle27 stoppt, bevor sie einen mechanischen Anschlag erreicht, sodass eine Lücke zwischen den Flächen47A und48A gebildet wird, wenn sich die Lenksäule10 in der verstauten Konfiguration befindet (d. h. die Steuerung15 kann Positionsdaten bezüglich der eingezogenen Position und/oder ausgefahrenen Position speichern und diese Daten nutzen, um den Motor5 in der eingezogenen und/oder ausgefahrenen Position zu stoppen). Außerdem veranlasst die Steuerung15 den Motor5 zum „Sperren“, um eine Drehung der Ausgangswelle27 und des Zahnrads28 zu verhindern oder zu blockieren, um dadurch eine Drehung der unteren Säule4, der inneren Säule7, der oberen Säule8 und des Lenkrads12 zu verhindern. Die Steuerung15 erzeugt autonome Lenkbefehle an das Fahrzeuglenksystem, wenn sich die Lenksäule10 in der autonomen Konfiguration der7 befindet, und eine Benutzereingabe (z. B. Drehung des Lenkrads12) ist nicht erforderlich, wenn sich das autonome Fahrzeug1 im autonomen Modus befindet. Im Allgemeinen kann die Steuerung15 dazu konfiguriert sein, den Motor zu stoppen, wenn die Lenksäule10 die verstaute Position der7 erreicht, sodass ein „harter“ mechanischer Anschlag nicht erforderlich ist. Die Lenksäule10 kann jedoch so konfiguriert sein, dass sie bei Bedarf einen mechanischen Anschlag beinhaltet.
Unter weiterer Bezugnahme auf8 kann die obere Säule8 aus der autonomen oder verstauten Konfiguration der7 in eine ausgefahrene oder manuelle Einsatzkonfiguration der8 nach außen verschoben werden. Insbesondere kann ein Benutzer die Benutzereingabevorrichtung14 oder14A (1 und2) betätigen, um der Steuerung15 ein Befehlssignal bereitzustellen, und die Steuerung15 betätigt die angetriebene Arretierung11, um das Arretierungselement20 in die zweite Position der8 zu schieben, sodass die Zahnradzähne19 des Arretierungselements20 gleichzeitig die Zahnräder26 der inneren Säule7 und die Arretierungsfläche oder Zahnräder18 des statischen Elements3 in Eingriff nehmen, um dadurch die innere Säule7 relativ zu dem statischen Element3 drehfest zu halten. Der Motor5 kann dann betätigt werden (z. B. durch die Steuerung15), um die Ausgangswelle27 und das Zahnrad28 zu drehen, um die untere Säule4 zu drehen. Wie vorstehend erörtert, sind die innere Säule7 und die obere Säule8 durch die Keilverbindung9 miteinander verbunden, sodass sich die obere Säule8 nicht drehen kann, wenn die innere Säule7 durch das Arretierungselement20 an dem statischen Element3 arretiert ist. Somit bewirkt die relative Drehung der Gewinde16 und17 bei Betätigung des Motors5, dass sich die obere Säule8 und das Lenkrad12 linear entlang der Achse A der Lenksäule10 verschieben, wie durch den Pfeil „A2“ gezeigt. Der Motor5 kann betätigt werden (z. B. durch die Steuerung15), um die Welle27 in einer ersten und zweiten Richtung zu drehen, um die obere Säule8 und das Lenkrad12 nach Bedarf auf Grundlage von Eingaben von einer Benutzereingabevorrichtung14 und/oder anderen Befehlen auszufahren und einzuziehen. Zum Beispiel kann die Position des Lenkrads12 im manuellen Modus der oberen Säule8 eingestellt (festgelegt) werden, um Benutzerkomfort bereitzustellen. Da das Ausfahren und Einziehen des Lenkrads12 erfolgt, wenn die innere Säule7 an dem statischen Element3 arretiert ist (d. h. die innere Säule7 kann nicht gedreht werden, um eine Sensoreingabe über den Sensor6 bereitzustellen), muss die Position des Lenkrads12 im autonomen Modus geändert werden. Wenn sich zum Beispiel die Lenksäule10 im manuellen Modus befindet und ein Benutzer das Lenkrad12 ausfahren oder einziehen möchte, kann ein Benutzer eine Anforderung unter Verwendung der Eingabevorrichtung14 (oder 14A) eingeben und kann die Steuerung15 vorübergehend in einen autonomen Fahrzeugsteuermodus wechseln, während das Lenkrad12 bewegt wird, und dann zurück in den manuellen Steuermodus wechseln. Außerdem kann die Steuerung15 eine oder mehrere manuelle Moduskonfigurationen (Positionen des Lenkrads12) speichern und ein Benutzer kann eine der gespeicherten Konfigurationen auswählen, sodass das Lenkrad12 an einer vom Benutzer ausgewählten Position stoppt, wenn vom autonomen Modus zum manuellen Modus gewechselt wird. Somit versteht es sich, dass das Lenkrad12 an verschiedenen Stellen positioniert sein kann, wenn sich die Lenksäule10 in der manuellen Konfiguration befindet.
Unter weiterer Bezugnahme auf9 sind, wenn sich die Lenksäule10 in einem manuellen (ausgefahrenen) Modus oder einer manuellen Konfiguration befindet, die innere Säule7 und die obere Säule8 durch das Arretierungselement20 drehbar an der unteren Säule4 arretiert, sodass eine Drehung der Lenksäule12 die untere Säule4, die innere Säule7 und die obere Säule8 dreht, wodurch im Gegenzug die Welle27 des Motors5 gedreht wird. Der Winkelpositionssensor6 des Motors5 detektiert eine Winkelposition der Welle27 des Motors5 und stellt der Steuerung15 ein Winkelpositionssignal bereit, das der manuellen Lenkeingabe des Benutzers (d. h. Winkelposition des Lenkrads12) entspricht. Die Lenksäule10 kann aus der manuellen Konfiguration der9 in die autonome (verstaute) Konfiguration der7 durch Umkehren des vorstehend in Verbindung mit8 beschriebenen Prozesses verschoben werden (z. B. kann ein Benutzer einen Befehl/eine Anforderung über die Eingabevorrichtung14 oder14A eingeben). Wie vorstehend erörtert, kann die tatsächliche Position der oberen Säule8 und des Lenkrads12 im manuellen Modus nach Wunsch unterschiedlicher Benutzer variieren, und das Lenkrad12 könnte von der Position der9 nach innen positioniert sein, wenn sich die Lenksäule10 in dem manuellen Modus/der manuellen Konfiguration befindet.
Unter weiterer Bezugnahme auf10 beinhaltet die Lenksäule10 eine Eingabevorrichtung14, die es einem Fahrer (Benutzer60) ermöglicht, dem Computer15 des autonomen Fahrzeugs1 Befehle (Eingaben) bereitzustellen. In10 bezeichnet ein Lenkradgetriebe58 im Allgemeinen eine mechanische Baugruppe, die die untere Säule4, die innere Säule7 und die obere Säule8 umfasst. Die Benutzereingaben können Anforderungen zum Verschieben der Lenksäule10 aus der Konfiguration der1 in die Konfiguration aus2 und umgekehrt beinhalten. Die Eingaben14 können auch genutzt werden, um eine Position des Lenkrads12 für Benutzerkomfort im manuellen Modus (2) einzustellen (siehe „Lenkradstellung (ergo)“ und „Säulenlängeneinstellung“). Der Motor5 kann betätigt werden, um dem Fahrer60 durch das Lenkradgetriebe58 eine Drehungs-/Vibrationsrückmeldung bereitzustellen, wenn sich das System in der manuellen Konfiguration befindet. Wenn sich das System im autonomen Modus befindet, steuert der Computer15 den Servomotor5, um dadurch eine Eingabe in das Lenkradgetriebe58 bereitzustellen, das wiederum dem Computer15 Winkelpositionsdaten über einen Sensor (Geber)6 bereitstellt, um eine Regelung bereitzustellen. Es versteht sich, dass das autonome Fahrzeug1 und die Lenksäule10 nach Bedarf für eine konkrete Anwendung konfiguriert sein können und10 lediglich ein Beispiel für eine mögliche Konfiguration ist.
Es versteht sich, dass Variationen und Modifikationen an der vorangehend erwähnten Struktur vorgenommen werden können, ohne von den Konzepten der vorliegenden Offenbarung abzuweichen, und es versteht sich ferner, dass derartige Konzepte durch die folgenden Patentansprüche abgedeckt sein sollen, sofern diese Patentansprüche durch ihren Wortlaut nicht ausdrücklich etwas anderes festlegen.
Gemäß der vorliegenden Erfindung wird eine Lenksäule für autonome Kraftfahrzeuge bereitgestellt, die Folgendes aufweist: ein statisches Element; eine drehbare untere Säule; einen Motor, der die untere Säule betriebsfähig in Eingriff nimmt, wodurch eine Betätigung des Motors bewirkt, dass sich die untere Säule dreht, und wobei der Motor einen gesperrten Zustand aufweist, in dem der Motor die Drehung der unteren Säule blockiert; einen Winkelpositionssensor, der dazu konfiguriert ist, ein Lenkbefehlssignal zu erzeugen, das einer Winkelposition der unteren Säule entspricht; eine drehbare innere Säule; eine drehbare obere Säule, die die untere Säule und die innere Säule teleskopisch in Eingriff nimmt, wodurch die obere Säule entlang einer Achse der Lenksäule relativ zu der unteren Säule und relativ zu der inneren Säule zwischen einer eingezogenen Position und einer Einsatzposition axial bewegbar ist, wobei die obere Säule relativ zu der inneren Säule drehfest ist, wodurch die obere Säule und die innere Säule zusammen um die Achse der Lenksäule drehen, und wobei die obere Säule und die untere Säule über Gewinde miteinander verbunden sind, sodass eine Betätigung des Motors eine Drehung der unteren Säule relativ zu der oberen Säule bewirkt und eine lineare Bewegung der oberen Säule relativ zu der unteren Säule zwischen der eingezogenen Position und der Einsatzposition bewirkt; ein Lenkrad, das an der oberen Säule befestigt ist; eine angetriebene Arretierung, die dazu konfiguriert ist, die innere Säule an der unteren Säule zu arretieren, wenn sich die angetriebene Arretierung in einer ersten Position befindet, und wobei die angetriebene Arretierung dazu konfiguriert ist, die innere Säule an dem statischen Element zu arretieren, wenn sich die angetriebene Arretierung in einer zweiten Position befindet, wobei die Lenksäule Folgendes definiert: 1) eine autonome Konfiguration, in der sich die obere Säule und das Lenkrad in der verstauten Position befinden, sich die angetriebene Arretierung in der ersten Position befindet und sich der Motor in einem gesperrten Zustand befindet, um eine Drehung der unteren Säule zu verhindern; und 2) eine manuelle Lenkkonfiguration, in der sich die obere Säule in der Einsatzposition befindet, sich die angetriebene Arretierung in der zweiten Position befindet, um eine Drehung der inneren Säule relativ zu dem statischen Element zu verhindern, und wobei der Sensor ein Lenkbefehlssignal erzeugt, das einer Winkelposition der unteren Säule, der oberen Säule und des Lenkrads entspricht.
Gemäß einer Ausführungsform ist die innere Säule drehbar mit dem statischen Element verbunden.
Gemäß einer Ausführungsform beinhaltet die innere Säule eine Welle, die sich durch eine Öffnung in der unteren Säule erstreckt.
Gemäß einer Ausführungsform beinhaltet die untere Säule nach außen gewandte Zahnradzähne; beinhaltet der Motor eine drehende Ausgangswelle mit einem an der Ausgangswelle montierten Antriebszahnrad, wobei das Antriebszahnrad die nach außen gewandten Zahnradzähne der unteren Säule in Eingriff nimmt, wodurch sich die Ausgangswelle dreht, wenn der Motor betätigt wird, um die untere Säule zu drehen.
Gemäß einer Ausführungsform ist der Winkelpositionssensor mit der Ausgangswelle des Motors wirkverbunden, wodurch der Winkelpositionssensor ein Signal erzeugt, das einer Winkelposition der Ausgangswelle entspricht.
Gemäß einer Ausführungsform beinhaltet die innere Säule nach außen gewandte Zahnradzähne; beinhaltet die angetriebene Arretierung ein Arretierungselement, das gleichzeitig die nach außen gewandten Zahnradzähne der unteren Säule und die nach außen gewandten Zahnradzähne der inneren Säule in Eingriff nimmt, wenn sich die angetriebene Arretierung in der ersten Position befindet, um die untere Säule drehbar an der inneren Säule zu arretieren.
Gemäß einer Ausführungsform nimmt das Arretierungselement gleichzeitig die nach außen gewandten Zahnradzähne der inneren Säule und eine Arretierungsfläche des statischen Elements in Eingriff, wenn sich die angetriebene Arretierung in der zweiten Position befindet, um eine Drehung der inneren Säule relativ zu dem statischen Element zu verhindern.
Gemäß einer Ausführungsform umfasst die angetriebene Arretierung einen linearen Elektromagneten, der das Arretierungselement zwischen der ersten und der zweiten Position verschiebt, wenn die angetriebene Arretierung betätigt wird.
Gemäß einer Ausführungsform beinhaltet die Welle der inneren Säule einen ersten Keilabschnitt, der axial und verschiebbar einen entsprechenden zweiten Keilabschnitt der oberen Säule in Eingriff nimmt, wodurch die innere Säule und die obere Säule relativ zueinander drehfest sind und die innere Säule und die zweite Säule axial relativ zueinander teleskopieren.
Gemäß der vorliegenden Erfindung wird ein autonomes Fahrzeug bereitgestellt, das Folgendes aufweist: ein Steuersystem, das dazu konfiguriert ist, Lenkbefehle zu erzeugen, wenn sich das autonome Fahrzeug in einem autonomen Betriebsmodus befindet, und wobei das Steuersystem dazu konfiguriert ist, Lenkbefehle von einem Fahrzeugführer zu nutzen, wenn sich das autonome Fahrzeug in einem manuellen Betriebsmodus befindet, eine Lenksäule, die Folgendes umfasst: ein statisches Element; eine drehbare erste Säule; einen Motor, der mit dem Steuersystem wirkverbunden ist, wobei der Motor die erste Säule mechanisch in Eingriff nimmt, wodurch eine Betätigung des Motors bewirkt, dass sich die erste Säule dreht; einen Winkelpositionssensor, der dazu konfiguriert ist, ein Lenkbefehlssignal an das Steuersystem zu erzeugen, das einer Winkelposition der ersten Säule entspricht, wenn sich das autonome Fahrzeug in dem manuellen Betriebsmodus befindet, eine drehbare zweite Säule; eine drehbare dritte Säule, die bewegbar an die erste Säule und die zweite Säule gekoppelt ist, wodurch die dritte Säule entlang einer Achse der Lenksäule relativ zu der ersten Säule und der zweiten Säule zwischen einer eingezogenen Position und einer Einsatzposition bewegbar ist, wobei die dritte Säule relativ zu der zweiten Säule drehfest ist, wodurch die dritte Säule und die zweite Säule zusammen drehen, und wobei die dritte Säule und die erste Säule betriebsfähig miteinander verbunden sind, sodass eine Betätigung des Motors eine Drehung der ersten Säule relativ zu der dritten Säule bewirkt und eine axiale Bewegung der dritten Säule relativ zu der ersten Säule zwischen der eingezogenen Position und der Einsatzposition bewirkt, wobei die dritte Säule ein manuelles Lenkeingabeelement beinhaltet; eine angetriebene Arretierung, die dazu konfiguriert ist, die zweite Säule an der ersten Säule zu arretieren, wenn sich die angetriebene Arretierung in einer ersten Position befindet, und die zweite Säule an dem statischen Element zu arretieren, wenn sich die angetriebene Arretierung in einer zweiten Position befindet, wobei die Lenksäule Folgendes definiert: 1) eine autonome Konfiguration, in der sich die dritte Säule in der verstauten Position befindet, sich die angetriebene Arretierung in der ersten Position befindet und der Motor eine Drehung der ersten Säule verhindert; und 2) eine manuelle Lenkkonfiguration, in der sich die dritte Säule in der Einsatzposition befindet, sich die angetriebene Arretierung in der zweiten Position befindet, um eine Drehung der zweiten Säule relativ zu dem statischen Element zu verhindern, und wobei der Sensor ein Lenkbefehlssignal erzeugt, das einer Winkelposition der ersten Säule, der dritten Säule und des manuellen Lenkeingabeelements entspricht; und wobei das Steuersystem dazu konfiguriert ist, den Motor und die angetriebene Arretierung zu betätigen, um die Lenksäule zwischen der autonomen Konfiguration und der manuellen Lenkkonfiguration zu verschieben.
Gemäß einer Ausführungsform sind die erste und dritte Säule durch Gewinde miteinander verbunden.
Gemäß einer Ausführungsform beinhaltet die zweite Säule eine Welle, die sich durch eine Öffnung in der ersten Säule erstreckt, um die zweite Säule und die erste Säule drehbar miteinander zu verbinden.
Gemäß einer Ausführungsform beinhaltet die erste Säule nach außen gewandte Zahnradzähne; beinhaltet die zweite Säule nach außen gewandte Zahnradzähne; beinhaltet der Motor eine drehende Ausgangswelle mit einem an der Ausgangswelle montierten Antriebszahnrad, wobei das Antriebszahnrad die nach außen gewandten Zahnradzähne der ersten Säule in Eingriff nimmt, wodurch sich die Ausgangswelle dreht, wenn der Motor betätigt wird, um die untere Säule zu drehen; beinhaltet die angetriebene Arretierung ein Arretierungselement, das gleichzeitig die nach außen gewandten Zahnradzähne der ersten Säule und die nach außen gewandten Zahnradzähne der zweiten Säule in Eingriff nimmt, wenn sich die angetriebene Arretierung in der ersten Position befindet, um die erste Säule drehbar an der zweiten Säule zu arreti eren.
Gemäß einer Ausführungsform ist der Winkelpositionssensor mit der Ausgangswelle des Motors wirkverbunden, wodurch der Winkelpositionssensor ein Signal an das Steuersystem erzeugt, das einer Winkelposition der Ausgangswelle entspricht.
Gemäß einer Ausführungsform nimmt das Arretierungselement gleichzeitig die nach außen gewandten Zahnradzähne der zweiten Säule und eine Arretierungsfläche des statischen Elements in Eingriff, wenn sich die angetriebene Arretierung in der zweiten Position befindet, um eine Drehung der zweiten Säule relativ zu dem statischen Element zu verhindern.
Gemäß einer Ausführungsform umfasst die angetriebene Arretierung einen linearen Elektromagneten, der das Arretierungselement zwischen der ersten und der zweiten Position verschiebt, wenn die angetriebene Arretierung betätigt wird.
Gemäß einer Ausführungsform umfasst die erste Säule eine untere Säule; umfasst die zweite Säule eine innere Säule; umfasst die dritte Säule eine obere Säule; umfasst das manuelle Lenkeingabeelement ein Lenkrad; und wobei die innere Säule mindestens teilweise innerhalb der unteren Säule und der oberen Säule angeordnet ist und die obere Säule die innere Säule und die untere Säule teleskopisch in Eingriff nimmt, wodurch sich die obere Säule bei Betätigung des Motors linear entlang der Achse der Lenksäule verlagert.
Gemäß der vorliegenden Erfindung wird eine Lenksäule für autonome Kraftfahrzeuge bereitgestellt, die Folgendes aufweist: ein statisches Element; eine drehbare untere Säule; einen Motor, der dazu konfiguriert ist, die untere Säule zu drehen; eine drehbare innere Säule; eine drehbare obere Säule, die betriebsfähig mit der unteren Säule und der inneren Säule verbunden ist und relativ zu der unteren Säule und der inneren Säule entlang einer Achse der Lenksäule axial bewegbar ist, wobei sich die obere Säule und die innere Säule zusammen drehen, und wobei die obere Säule und die innere Säule betriebsfähig miteinander verbunden sind, sodass eine motorgetriebene Drehung der unteren Säule relativ zu der oberen Säule eine Ein- und Auswärtsbewegung der oberen Säule relativ zu der unteren Säule zwischen der eingezogenen Position und der Einsatzposition bewirkt, wobei die obere Säule ein Lenkrad beinhaltet; eine Arretierung, die dazu konfiguriert ist, die innere Säule an der unteren Säule zu arretieren, wenn sich die Arretierung in einer ersten Position befindet, und wobei die Arretierung dazu konfiguriert ist, die innere Säule an dem statischen Element zu arretieren, wenn sich die Arretierung in einer zweiten Position befindet, wobei die Lenksäule Folgendes definiert: 1) eine autonome Konfiguration, in der sich die obere Säule und das Lenkrad in der verstauten Position befinden, sich die Arretierung sich in der ersten Position befindet und sich der Motor in einem gesperrten Zustand befindet, um eine Drehung der unteren Säule zu verhindern; und 2) eine manuelle Lenkkonfiguration, in der sich die obere Säule in der Einsatzposition befindet, sich die Arretierung sich in der zweiten Position befindet, um eine Drehung der inneren Säule relativ zu dem statischen Element zu verhindern.
Gemäß einer Ausführungsform ist die Erfindung ferner durch einen Winkelpositionssensor gekennzeichnet, der dazu konfiguriert ist, ein Lenkbefehlssignal zu erzeugen, das einer Winkelposition der unteren Säule entspricht; und wobei der Sensor ein Lenkbefehlssignal erzeugt, das einer Winkelposition der unteren Säule, der oberen Säule und des Lenkrads entspricht.
Gemäß einer Ausführungsform umfasst die Arretierung einen angetriebenen Aktor und ein bewegbares Arretierungselement, das gleichzeitig die untere Säule und die innere Säule in Eingriff nimmt, wenn sich die angetriebene Arretierung in der ersten Position befindet, um die untere Säule drehbar an der inneren Säule zu arretieren.