DE102019134940A1 - Reference arrangement for a coordinate measuring machine, coordinate measuring machine and method for calibrating a coordinate measuring machine - Google Patents
Reference arrangement for a coordinate measuring machine, coordinate measuring machine and method for calibrating a coordinate measuring machineDownload PDFInfo
- Publication number
- DE102019134940A1 DE102019134940A1DE102019134940.0ADE102019134940ADE102019134940A1DE 102019134940 A1DE102019134940 A1DE 102019134940A1DE 102019134940 ADE102019134940 ADE 102019134940ADE 102019134940 A1DE102019134940 A1DE 102019134940A1
- Authority
- DE
- Germany
- Prior art keywords
- arrangement
- coordinate measuring
- target
- guide
- reference target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034methodMethods0.000titleclaimsdescription11
- 239000003550markerSubstances0.000claimsdescription40
- 230000003287optical effectEffects0.000claimsdescription36
- 238000011156evaluationMethods0.000claimsdescription27
- 230000033001locomotionEffects0.000claimsdescription24
- 230000003134recirculating effectEffects0.000claimsdescription2
- 238000005259measurementMethods0.000description11
- 238000001125extrusionMethods0.000description6
- 239000000523sampleSubstances0.000description4
- 238000013519translationMethods0.000description4
- 230000014616translationEffects0.000description4
- 239000000919ceramicSubstances0.000description2
- 238000006073displacement reactionMethods0.000description2
- BUHVIAUBTBOHAG-FOYDDCNASA-N(2r,3r,4s,5r)-2-[6-[[2-(3,5-dimethoxyphenyl)-2-(2-methylphenyl)ethyl]amino]purin-9-yl]-5-(hydroxymethyl)oxolane-3,4-diolChemical compoundCOC1=CC(OC)=CC(C(CNC=2C=3N=CN(C=3N=CN=2)[C@H]2[C@@H]([C@H](O)[C@@H](CO)O2)O)C=2C(=CC=CC=2)C)=C1BUHVIAUBTBOHAG-FOYDDCNASA-N0.000description1
- 239000011248coating agentSubstances0.000description1
- 238000000576coating methodMethods0.000description1
- 230000004807localizationEffects0.000description1
- 239000000463materialSubstances0.000description1
- 238000002310reflectometryMethods0.000description1
- 238000005096rolling processMethods0.000description1
- 230000009897systematic effectEffects0.000description1
Images




Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
- G01B11/005—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates coordinate measuring machines
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
- G01B21/04—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness by measuring coordinates of points
- G01B21/042—Calibration or calibration artifacts
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/004—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points
- G01B5/008—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points using coordinate measuring machines
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- A Measuring Device Byusing Mechanical Method (AREA)
Abstract
Translated fromGermanDescription
Translated fromGermanDie vorliegende Erfindung betrifft eine Referenzanordnung für ein Koordinatenmessgerät mit zumindest einer Linearachse, ein Koordinatenmessgerät und ein Verfahren zum Kalibrieren eines Koordinatenmessgeräts. Die Referenzanordnung weist ein Referenztarget und eine Führung auf. Das Referenztarget ist eingerichtet, um einen Bezugspunkt zu definieren.The present invention relates to a reference arrangement for a coordinate measuring machine with at least one linear axis, a coordinate measuring machine and a method for calibrating a coordinate measuring machine. The reference arrangement has a reference target and a guide. The reference target is set up to define a reference point.
Eine solche Referenzanordnung und ein solches Verfahren sind aus
Es besteht der Wunsch, eine Referenzanordnung bereitzustellen, die eine effiziente Kalibrierung eines Koordinatenmessgeräts, insbesondere hinsichtlich Zeitaufwand und Personalkosten, ermöglicht. Dementsprechend ist es eine Aufgabe der vorliegenden Erfindung, eine entsprechende Referenzanordnung und ein entsprechendes Verfahren anzugeben.There is a desire to provide a reference arrangement that enables efficient calibration of a coordinate measuring machine, in particular with regard to the expenditure of time and personnel costs. Accordingly, it is an object of the present invention to specify a corresponding reference arrangement and a corresponding method.
Diese Aufgabe wird durch eine Referenzanordnung der eingangs genannten Art gelöst, wobei die Führung eingerichtet ist, um das Referenztarget entlang eines Pfads zu führen.This object is achieved by a reference arrangement of the type mentioned at the outset, the guide being set up to guide the reference target along a path.
Die Referenzanordnung kann insbesondere ausgestaltet sein, um das Koordinatenmessgerät zu kalibrieren. Die Kalibration des Koordinatenmessgeräts kann mittels der Referenzanordnung beispielsweise vollständig automatisiert durchgeführt werden, zumindest nach einem Starten der Kalibrierung des Koordinatenmessgeräts. Die neue Referenzanordnung kann den Vorteil aufweisen, dass beispielsweise ein händisches Verschieben eines Stufenendmaßes nicht mehr erforderlich ist. Mittels der neuen Referenzanordnung können Personalkosten und/oder Zeitkosten eingespart werden. Mittels der neuen Referenzanordnung kann beispielsweise ein Koordinatenmessgerät vollständig während einer Messpause, beispielsweise über Nacht, kalibriert werden, insbesondere ohne dass es einer Person zur Bedienung bedürfe. Die Referenzanordnung kann eine hohe Variabilität aufweisen, insbesondere durch die Möglichkeit das Referenztarget entlang des Pfads zu führen. Mittels der neuen Referenzanordnung kann eine hochgenaue Lokalisierung von sechs Freiheitsgraden erzielt werden. Insbesondere kann mittels der neuen Referenzanordnung eine automatisierte Lösung zur Aufnahme eines Positionsfehlers hinsichtlich der sechs Freiheitsgrade bereitgestellt werden, beispielweise für eine 5- oder 6-Achsenmessmaschine, wobei das Koordinatenmessgerät sowohl taktile als auch optische Sensoren aufweisen kann.The reference arrangement can in particular be designed to calibrate the coordinate measuring machine. The calibration of the coordinate measuring machine can, for example, be carried out completely automatically by means of the reference arrangement, at least after the calibration of the coordinate measuring machine has been started. The new reference arrangement can have the advantage that, for example, manual displacement of a step gauge is no longer necessary. The new reference arrangement can save personnel costs and / or time costs. By means of the new reference arrangement, for example, a coordinate measuring machine can be completely calibrated during a measurement break, for example overnight, in particular without the need for a person to operate it. The reference arrangement can have a high degree of variability, in particular due to the possibility of guiding the reference target along the path. With the new reference arrangement, a highly precise localization of six degrees of freedom can be achieved. In particular, the new reference arrangement can be used to provide an automated solution for recording a position error with regard to the six degrees of freedom, for example for a 5- or 6-axis measuring machine, wherein the coordinate measuring machine can have both tactile and optical sensors.
Die oben genannte Aufgabe ist daher vollständig gelöst.The above-mentioned object is therefore completely achieved.
Das Referenztarget kann beispielsweise als Stufenendmaß ausgestaltet sein. Das Referenztarget kann ganz oder teilweise aus einem Material mit einem geringen Wärmeausdehnungskoeffizient aufgebaut sein, beispielsweise aus Keramik. Das Referenztarget kann beispielsweise mehrere Körper aus Keramik aufweisen, beispielsweise zylinderförmige Körper. Hierdurch kann eine Genauigkeit der Referenzanordnung erhöht werden.The reference target can be designed as a step gauge, for example. The reference target can be constructed entirely or partially from a material with a low coefficient of thermal expansion, for example from ceramic. The reference target can, for example, have several bodies made of ceramic, for example cylindrical bodies. This can increase the accuracy of the reference arrangement.
Der Bezugspunkt kann beispielsweise eingerichtet sein, um als Referenzwert erfasst zu werden. Der Bezugspunkt kann ein Punkt sein oder ein Abstand. Das Referenztarget kann insbesondere eingerichtet sein, um einen Bezugspunkt in einem Bezugssystem, beispielsweise einem Laborsystem, zu definieren.The reference point can be set up, for example, to be recorded as a reference value. The reference point can be a point or a distance. The reference target can in particular be set up to define a reference point in a reference system, for example a laboratory system.
In einer Ausgestaltung der neuen Referenzanordnung weist der Pfad eine Linearachse auf. Die Linearachse kann eine Linearfahrachse sein. Das Referenztarget kann beispielsweise als Schlitten ausgestaltet sein. Beispielsweise kann die Referenzanordnung eingerichtet sein, um das Referenztarget mittels der Führung entlang einer Achse eines kartesischen Koordinatensystems zu führen, bevorzugt entlang drei Achsen des Koordinatensystems. Hierdurch können Fehler des Koordinatenmessgeräts, beispielsweise Bewegungsfehler eines Messkopfs des Koordinatensystems, insbesondere bei einer linearen Bewegung des Messkopfs entlang einer Achse des Koordinatensystems, erfasst werden. Alternativ oder zusätzlich zu einer Linearachse kann der Pfad einen nicht linearen Abschnitt aufweisen. Der Pfad kann beispielsweise zumindest teilweise kreisförmig oder spiralförmig sein. Hierdurch kann eine Variabilität der Referenzanordnung erzielt werden.In one embodiment of the new reference arrangement, the path has a linear axis. The linear axis can be a linear travel axis. The reference target can be designed as a slide, for example. For example, the reference arrangement can be set up to guide the reference target by means of the guide along an axis of a Cartesian coordinate system, preferably along three axes of the coordinate system. As a result, errors in the coordinate measuring device, for example movement errors in a measuring head of the coordinate system, in particular in the case of a linear movement of the measuring head along an axis of the coordinate system, can be detected. As an alternative or in addition to a linear axis, the path can have a non-linear section. For example, the path can be at least partially circular or spiral. A variability of the reference arrangement can be achieved in this way.
In einer Ausgestaltung der Referenzanordnung weist das Referenztarget mehrere planare Flächen auf, wobei sich die Flächennormalen der planaren Flächen voneinander unterscheiden. Die mehreren planaren Flächen können beispielsweise Oberflächen sein. Das Referenztarget kann facettenartig ausgestaltet sein. Es kann vorteilhaft sein, wenn das Referenztarget möglichst viele planare Flächen mit sich voneinander unterscheidenden Flächennormalen aufweist, insbesondere um Geraden im Bezugssystem zu definieren. Das Referenztarget kann vielflächig ausgestaltet sein. Verschiedene Oberflächennormalen-Ausrichtungen der planaren Flächen können vorteilhaft sein, insbesondere zur Definition von Bezugspunkten.In one embodiment of the reference arrangement, the reference target has a plurality of planar surfaces, with the surface normals of the planar surfaces differing from one another. The multiple planar surfaces can be surfaces, for example. The reference target can be faceted be designed. It can be advantageous if the reference target has as many planar surfaces as possible with surface normals that differ from one another, in particular in order to define straight lines in the reference system. The reference target can be designed with multiple surfaces. Different surface normal orientations of the planar surfaces can be advantageous, in particular for the definition of reference points.
Das Referenztarget kann beispielsweise eine erste planare Fläche und eine zweite planare Fläche aufweisen. Eine Flächennormale der ersten planaren Fläche kann beispielsweise einen Winkel zu einer Flächennormalen der zweiten planaren Fläche aufweisen, wobei der Winkel zwischen 5° und 355°, insbesondere zwischen 50° und 110°, beispielsweise 90° oder 45° betragen kann. Das Referenztarget kann eine Ausnehmung für die Führung aufweisen. Beispielsweise kann das Referenztarget Laufrollen aufweisen, um entlang der Führung bewegt werden zu können.The reference target can have a first planar surface and a second planar surface, for example. A surface normal of the first planar surface can, for example, have an angle to a surface normal of the second planar surface, wherein the angle can be between 5 ° and 355 °, in particular between 50 ° and 110 °, for example 90 ° or 45 °. The reference target can have a recess for the guide. For example, the reference target can have rollers in order to be able to be moved along the guide.
In einer Ausgestaltung der Referenzanordnung ist das Referenztarget prismenförmig. Ein prismenförmiger Körper ist ein Körper, welcher durch Extrusion eines Vielecks entsteht. Das Referenztarget kann beispielsweise eine Form aufweisen, die durch Extrusion eines Vielecks entsteht, wobei das Vieleck
In einer Ausgestaltung der Referenzanordnung weist das Referenztarget einen optischen Marker auf. Die Referenzanordnung kann beispielsweise mehrere optische Marker aufweisen. Der optische Marker kann beispielsweise ein Zielmarker sein. Der optische Marker kann eingerichtet sein, um den Bezugspunkt zu definieren. Der optische Marker kann beispielsweise nicht rotationssymmetrisch ausgestaltet sein. Hierdurch kann erreicht werden, dass der optische Marker eindeutig eine Ausrichtung senkrecht zu einer planaren Fläche des Referenztargets definieren kann, beispielsweise als Bezugspunkt. Der optische Marker kann beispielsweise durch einen Hell/Dunkel-Kontrast auf einer planaren Fläche des Referenztargets und/oder durch einen Farbkontrast auf einer planaren Fläche des Referenztargets und/oder durch Unterschiede einer Reflexivität zweier Oberflächen des Referenztargets erzielt werden. Der optische Marker kann beispielsweise einen Retroreflektor und/oder einen Spiegel aufweisen. Das Referenztarget kann beispielsweise eine Anordnung mehrerer optischer Marker aufweisen. Beispielsweise kann auch eine Ecke des Referenztargets als optischer und/oder taktiler Marker dienen. Beispielsweise kann jede planare Fläche des Referenztargets mindestens einen, insbesondere mindestens drei optische Marker aufweisen. Mittels des optischen Markers kann das Referenztarget eingerichtet sein, um den Bezugspunkt zu definieren.In one embodiment of the reference arrangement, the reference target has an optical marker. The reference arrangement can have several optical markers, for example. The optical marker can be a target marker, for example. The optical marker can be set up to define the reference point. The optical marker can, for example, not be designed to be rotationally symmetrical. In this way it can be achieved that the optical marker can clearly define an alignment perpendicular to a planar surface of the reference target, for example as a reference point. The optical marker can be achieved, for example, by a light / dark contrast on a planar surface of the reference target and / or by a color contrast on a planar surface of the reference target and / or by differences in the reflectivity of two surfaces of the reference target. The optical marker can for example have a retroreflector and / or a mirror. The reference target can, for example, have an arrangement of several optical markers. For example, a corner of the reference target can also serve as an optical and / or tactile marker. For example, each planar surface of the reference target can have at least one, in particular at least three, optical markers. The reference target can be set up by means of the optical marker in order to define the reference point.
In einer Ausgestaltung der Referenzanordnung weist das Referenztarget einen taktilen Marker auf. Beispielsweise kann die Referenzanordnung sowohl ein oder mehrere optische Marker als auch ein oder mehrere taktile Marker aufweisen. Der taktile Marker kann beispielsweise nicht rotationssymmetrisch ausgestaltet sein. Hierdurch kann erreicht werden, dass der taktile Marker eindeutig eine Ausrichtung senkrecht zu einer planaren Fläche des Referenztargets definieren kann, beispielsweise als Bezugspunkt. Das Referenztarget kann beispielsweise ein Kugeltripel aufweisen. Hierdurch kann erzielt werden, dass das Referenztarget den Bezugspunkt definieren kann. Eine planare Fläche des Referenztargets kann beispielsweise genau ein Kugeltripel und genau einen optischen Marker aufweisen. Die planare Fläche kann beispielsweise ein Rechteck sein. Das Rechteck kann auf einer Längsseite das Kugeltripel aufweisen und auf der entgegengesetzten Seite den optischen Marker. Eine weitere rechteckförmige planare Fläche des Referenztargets kann sich direkt an das beschriebene Rechteck anschließen, wobei der optische Marker und der taktile Marker des weiteren Rechtecks spiegelsymmetrisch zu dem ersten Rechteck angeordnet sein können.In one embodiment of the reference arrangement, the reference target has a tactile marker. For example, the reference arrangement can have both one or more optical markers and one or more tactile markers. The tactile marker can, for example, not be designed to be rotationally symmetrical. In this way it can be achieved that the tactile marker can clearly define an alignment perpendicular to a planar surface of the reference target, for example as a reference point. The reference target can have a triple sphere, for example. In this way it can be achieved that the reference target can define the reference point. A planar surface of the reference target can, for example, have exactly one triple sphere and exactly one optical marker. The planar surface can be a rectangle, for example. The rectangle can have the triple sphere on one long side and the optical marker on the opposite side. A further rectangular planar surface of the reference target can directly adjoin the described rectangle, wherein the optical marker and the tactile marker of the further rectangle can be arranged mirror-symmetrically to the first rectangle.
Der optische Marker kann beispielsweise zwei, insbesondere drei konzentrische Kreise aufweisen. Der optische Marker kann beispielsweise als Zielscheibe ausgestaltet sein. Der optische Marker kann beispielsweise mehrere parallele Striche aufweisen. Der optische Marker und/oder der taktile Marker können mehrere konzentrisch angeordnete Figuren aufweisen, beispielsweise ein zu einem Kreis konzentrisch angeordnetes Vieleck, beispielsweise ein Dreieck. Der optische Marker kann beispielsweise zwei Linien aufweisen, die einen Winkel zueinander bilden, beispielsweise einen Winkel von 100°-50°, beispielsweise 90° oder 45°. Der taktile Marker und/oder der optische Marker können zielscheibenförmige und/oder zebrastreifenartige Strukturen aufweisen. Das Referenztarget kann sowohl für optische Sensorelemente als auch für taktile Sensorelemente erfassbare Merkmale aufweisen. Hierdurch kann eine Genauigkeit der Kalibrierung erhöht werden.The optical marker can for example have two, in particular three concentric circles. The optical marker can be designed as a target, for example. The optical marker can, for example, have several parallel lines. The optical marker and / or the tactile marker can have a plurality of concentrically arranged figures, for example a polygon arranged concentrically to a circle, for example a triangle. The optical marker can, for example, have two lines which form an angle to one another, for example an angle of 100 ° -50 °, for example 90 ° or 45 °. The tactile marker and / or the optical marker can have target-shaped and / or zebra-like structures. The reference target can have detectable features both for optical sensor elements and for tactile sensor elements. This can increase the accuracy of the calibration.
In einer Ausgestaltung der Referenzanordnung ist die Führung ausgewählt aus einer Gruppe von Führungen bestehend aus einer Schiene, einer Rundbuchse mit Kugelumlauf und einem Führungsgetriebe. Die Schiene kann ganz oder teilweise von dem Referenztarget umgriffen sein. Die Profilschiene kann beispielsweise im Wesentlichen quaderförmig oder zylindrisch sein. Die Führung kann beispielsweise mehrere parallele Schienen aufweisen, beispielsweise zwei Schienen. Die Führung kann beispielsweise eine Profilschienenführung sein. Alternativ hierzu kann die Führung eine Laufrollenführung sein. Die Führung kann beispielsweise eine Wellenführung sein. Die Führung kann einen Wälzkörper aufweisen. Die Führung kann beispielsweise ein Linearkugellager aufweisen. Die Führung kann beispielsweise ein oder mehrere Kugelumläufe und/oder ein oder mehrere Rollenumläufe aufweisen. Die Führung kann beispielsweise eine Teleskopschiene aufweisen. Die Führung kann beispielsweise einen Gleitbelag aufweisen. Hierdurch kann eine präzise Führung des Referenztargets erreicht werden.In one embodiment of the reference arrangement, the guide is selected from a group of guides consisting of a rail, a round bushing with recirculating ball and a guide gear. The rail can be completely or partially encompassed by the reference target. The profile rail can, for example, be essentially cuboid or cylindrical. The guide can for example have several parallel rails, for example two rails. The guide can be a profile rail guide, for example. Alternatively, the guide can be a roller guide. The guide can be a wave guide, for example. The guide can have a rolling element. The guide can have a linear ball bearing, for example. The guide can, for example, have one or more ball circuits and / or one or more roller circuits. The guide can have a telescopic rail, for example. The guide can, for example, have a sliding coating. This enables precise guidance of the reference target to be achieved.
In einer Ausgestaltung der neuen Referenzanordnung weist die Referenzanordnung eine Vorrichtung zum Erfassen einer Lage des Referenztargets auf. Die Lage des Referenztargets kann eine Position und/oder eine Ausrichtung umfassen, insbesondere sechs Freiheitsgrade, beispielsweise Positionen bezüglich der drei Raumrichtungen des kartesischen Koordinatensystems und/oder ein Rollen und/oder ein Nicken und/oder ein Gieren. Die Referenzanordnung kann eingerichtet sein, um eine Bewegung des Referenztargets zu tracken, insbesondere in den sechs genannten Freiheitsgraden. Die Referenzanordnung kann eingerichtet sein, um das Referenztarget entlang der Linearfahrachse zu verschieben. Hierdurch kann ein variables Stufenendmaß verwirklicht werden. Bei einer Verschiebung entlang der Linearfahrachse kann beispielsweise eine Position des Referenztargets in sechs Freiheitsgraden, d.h. für alle Translationen und Rotationen, getrackt werden, insbesondere mittels der Vorrichtung zur Erfassung der Lage.In one embodiment of the new reference arrangement, the reference arrangement has a device for detecting a position of the reference target. The location of the reference target can include a position and / or an orientation, in particular six degrees of freedom, for example positions with respect to the three spatial directions of the Cartesian coordinate system and / or a roll and / or a pitch and / or a yaw. The reference arrangement can be set up to track a movement of the reference target, in particular in the six stated degrees of freedom. The reference arrangement can be set up to move the reference target along the linear travel axis. This enables a variable step gauge to be achieved. With a displacement along the linear travel axis, for example, a position of the reference target can be tracked in six degrees of freedom, i.e. for all translations and rotations, in particular by means of the device for detecting the position.
Die Vorrichtung zum Erfassen einer Lage des Referenztargets kann beispielsweise einen optischen Aufbau aufweisen, beispielsweise umfassend ein Interferometer und/oder einen ortsauflösenden Detektor. Die Referenzanordnung kann beispielsweise einen Retroreflektor aufweisen. Die Referenzanordnung kann eingerichtet sein, um eine Position des Bezugspunkts unabhängig zu bestimmen und/oder zu überprüfen..The device for detecting a position of the reference target can for example have an optical structure, for example comprising an interferometer and / or a spatially resolving detector. The reference arrangement can have a retroreflector, for example. The reference arrangement can be set up to independently determine and / or check a position of the reference point.
In einer Ausführungsform der Referenzanordnung weist die Referenzanordnung eine erste Rotationsvorrichtung auf. Die erste Rotationsvorrichtung ist eingerichtet, um die Führung um eine erste Achse zu drehen. Die erste Achse kann beispielsweise eine Achse des Koordinatensystems des Laborsystems sein. Die erste Achse kann eine ortsfeste Achse zu einer Basis in dem Laborsystem sein. Die Rotationsvorrichtung kann eingerichtet sein, um das Referenztarget relativ zu dem kartesischen Koordinatensystem des Laborsystems zu rotieren und/oder auf einer Kreisbahn zu bewegen. Die erste Rotationsvorrichtung erhöht eine Variabilität der Referenzanordnung.In one embodiment of the reference arrangement, the reference arrangement has a first rotation device. The first rotation device is set up to rotate the guide about a first axis. The first axis can, for example, be an axis of the coordinate system of the laboratory system. The first axis can be a stationary axis to a base in the laboratory system. The rotation device can be set up to rotate the reference target relative to the Cartesian coordinate system of the laboratory system and / or to move it on a circular path. The first rotation device increases the variability of the reference arrangement.
Ein Ausführungsbeispiel der Referenzanordnung weist eine zweite Rotationsvorrichtung auf. Die zweite Rotationsvorrichtung ist eingerichtet, um die Führung um eine zweite Achse zu drehen. Die zweite Achse kann senkrecht zu der ersten Achse angeordnet sein. Beispielsweise kann die erste Achse eine x-Achse und die zweite Achse eine y-Achse eines kartesischen Koordinatensystems des Laborsystems sein.One embodiment of the reference arrangement has a second rotation device. The second rotating device is set up to rotate the guide about a second axis. The second axis can be arranged perpendicular to the first axis. For example, the first axis can be an x-axis and the second axis can be a y-axis of a Cartesian coordinate system of the laboratory system.
Die Referenzanordnung kann beispielsweise weiterhin eine dritte Rotationsvorrichtung aufweisen. Die dritte Rotationsvorrichtung kann eingerichtet sein, um die Führung um eine dritte Achse zu drehen. Die dritte Achse kann senkrecht zu der ersten Achse und zu der zweiten Achse sein. Hierdurch kann eine Variabilität der Referenzanordnung erhöht werden. Die erste Rotationsvorrichtung und/oder die zweite Rotationsvorrichtung und/oder die dritte Rotationsvorrichtung können ein oder mehrere Lager aufweisen, insbesondere Drehlager, beispielsweise ein oder mehrere Kugellager. Hierdurch kann eine Präzision der Bewegung des Referenztargets erhöht werden.The reference arrangement can, for example, also have a third rotation device. The third rotation device can be configured to rotate the guide about a third axis. The third axis can be perpendicular to the first axis and to the second axis. This can increase the variability of the reference arrangement. The first rotation device and / or the second rotation device and / or the third rotation device can have one or more bearings, in particular pivot bearings, for example one or more ball bearings. As a result, the precision of the movement of the reference target can be increased.
Ein Ausführungsbeispiel der Referenzanordnung weist eine Auswerte- und Steuereinrichtung auf. Die Auswerte- und Steuereinrichtung kann beispielsweise ein oder mehrere Prozessoren aufweisen. Mittels der Auswerte- und Steuereinrichtung kann eine Automatisierung der Referenzanordnung erzielt werden. Hierdurch können Personalkosten eingespart werden.One embodiment of the reference arrangement has an evaluation and control device. The evaluation and control device can have one or more processors, for example. Automation of the reference arrangement can be achieved by means of the evaluation and control device. This can save personnel costs.
In einem Ausführungsbeispiel der Referenzanordnung ist die Auswerte- und Steuereinrichtung eingerichtet, um eine Bewegung des Referenztargets zu einer Messposition zu steuern, wobei die Auswerte- und Steuereinrichtung eingerichtet ist, um mittels des Bezugspunkts einen Fehler des Koordinatenmessgeräts zu bestimmen. Eine Drehung der Führung und/oder ein Führen des Referenztargets entlang des Pfads können beispielsweise durch die Auswerte- und Steuereinrichtung und/oder durch die Vorrichtung zur Erfassung einer Lage kontrollierbar sein. Eine Bewegung des Referenztargets zu einer Messposition kann durch ein Ansteuern eines Elektromotors gesteuert werden. Die Bewegung des Referenztargets zu einer Messposition kann mittels der Führung und/oder der ersten Rotationsvorrichtung und/oder der zweiten Rotationsvorrichtung erfolgen. Die Bewegung des Referenztargets zu der Messposition kann entlang des Pfads erfolgen, beispielsweise um einen Winkel um die erste Achse und/oder um einen Winkel um die zweite Achse und/oder durch eine Translation entlang der Führung. Die Bewegung des Referenztargets zu der Messposition kann beispielsweise CNC (Computerized Numerical Control)-gesteuert erfolgen. Die Auswerte- und Steuereinrichtung kann eingerichtet sein, um eine Bewegung des Referenztargets entlang des Pfads und/oder um die erste Achse und/oder um die zweite Achse zu kontrollieren, insbesondere CNC-gesteuert. Hierdurch kann die Referenzanordnung automatisiert ausgestaltet werden. Eine Kalibration kann vollautomatisch durchgeführt werden, insbesondere nach einer Bereitstellung der Referenzanordnung.In one embodiment of the reference arrangement, the evaluation and control device is set up to control a movement of the reference target to a measuring position, the evaluation and control device being set up to determine an error in the coordinate measuring machine by means of the reference point. A rotation of the guide and / or a guiding of the reference target along the path can be controlled, for example, by the evaluation and control device and / or by the device for detecting a position. A movement of the reference target to a measuring position can be controlled by driving an electric motor. The movement of the reference target to a measuring position can be performed by means of the guide and / or the first rotation device and / or the second rotating device. The movement of the reference target to the measurement position can take place along the path, for example by an angle about the first axis and / or by an angle about the second axis and / or by a translation along the guide. The movement of the reference target to the measurement position can for example be controlled by CNC (Computerized Numerical Control). The evaluation and control device can be set up to control a movement of the reference target along the path and / or about the first axis and / or about the second axis, in particular CNC-controlled. As a result, the reference arrangement can be designed to be automated. A calibration can be carried out fully automatically, in particular after the reference arrangement has been made available.
Der Fehler kann beispielsweise eine Abweichung sein, insbesondere eine Bewegungsabweichung, beispielsweise eine Abweichung einer Bewegung des Messkopfs des Koordinatensystems, beispielsweise ein Abweichen von einer Bewegung des Messkopfs entlang einer Achse, beispielsweise entlang einer Achse des kartesischen Koordinatensystems des Laborsystems. Der Fehler kann beispielsweise eine Abweichung der Sensoranordnung eines Koordinatenmessgeräts umfassen. Der Fehler kann beispielsweise einen 6D-Positionsfehler umfassen. Der 6D-Positionsfehler umfasst einen Positionsfehler, zwei Translationsfehler, einen Gierfehler, einen Nickfehler und einen Rollfehler. Alternativ hierzu kann der Fehler lediglich ein oder mehrere der genannten Komponenten des 6D-Positionsfehlers umfassen. Das Referenztarget kann eingerichtet sein, um den Tastarm und/oder den Messkopf und/oder die Sensoranordnung zu kalibrieren.The error can, for example, be a deviation, in particular a movement deviation, for example a deviation in a movement of the measuring head of the coordinate system, for example a deviation from a movement of the measuring head along an axis, for example along an axis of the Cartesian coordinate system of the laboratory system. The error can include, for example, a deviation in the sensor arrangement of a coordinate measuring machine. The error can include, for example, a 6D position error. The 6D position error includes a position error, two translation errors, a yaw error, a pitch error, and a roll error. Alternatively, the error can comprise only one or more of the mentioned components of the 6D position error. The reference target can be set up to calibrate the probe arm and / or the measuring head and / or the sensor arrangement.
Der Fehler kann beispielsweise eine Messabweichung und/oder eine Fehlbewegung, insbesondere für verschiedene Messpositionen sein. Der Fehler kann eine Längenmaßabweichung aufweisen. Die Referenzanordnung kann eingerichtet sein, um ein Maschinenvolumen zu qualifizieren. Die Referenzanordnung kann insbesondere eingerichtet sein, um systematische Fehlbewegungen bezüglich aller sechs Freiheitsgrade zu erfassen, insbesondere um diese zu korrigieren, beispielsweise mittels der Auswerte- und Steuereinrichtung.The error can be, for example, a measurement deviation and / or an incorrect movement, in particular for different measurement positions. The error can have a length deviation. The reference arrangement can be set up to qualify a machine volume. The reference arrangement can in particular be set up to detect systematic erroneous movements with respect to all six degrees of freedom, in particular to correct them, for example by means of the evaluation and control device.
Ein Positionsfehler ist eine Fehlbewegung in eine Bewegungsrichtung, beispielsweise eine Fehlbewegung eines Messkopfs entlang einer Verfahrachse des Messkopfs. Ein Translationsfehler ist eine Fehlpositionierung in einer ersten und/oder zweiten senkrecht zu der Bewegungsachse stehenden Achse. Ein Rollen ist eine Rotation um die Bewegungsachse. Gieren und Nicken sind Rotationen um die erste senkrecht zu der Bewegungsachse stehenden Achsen beziehungsweise um die zweite senkrecht zu der Bewegungsachse stehende Achse.A position error is an incorrect movement in a direction of movement, for example an incorrect movement of a measuring head along a travel axis of the measuring head. A translation error is incorrect positioning in a first and / or second axis perpendicular to the axis of movement. A roll is a rotation around the axis of motion. Yaw and pitch are rotations about the first axis perpendicular to the axis of movement and about the second axis perpendicular to the axis of movement.
Ein weiterer Aspekt der vorliegenden Erfindung umfasst ein Koordinatenmessgerät mit zumindest einer Linearachse, wobei das Koordinatenmessgerät eine wie oben beschriebene Referenzanordnung aufweist.Another aspect of the present invention comprises a coordinate measuring machine with at least one linear axis, the coordinate measuring machine having a reference arrangement as described above.
Ein Ausführungsbeispiel des Koordinatenmessgeräts weist eine Auswerte- und Steuereinrichtung und einen Messkopf mit einer Sensoranordnung auf. Der Messkopf kann entlang der Linearachse relativ zu der Referenzanordnung verfahrbar sein, insbesondere in einem Messvolumen des Koordinatenmessgeräts.One embodiment of the coordinate measuring machine has an evaluation and control device and a measuring head with a sensor arrangement. The measuring head can be moved along the linear axis relative to the reference arrangement, in particular in a measuring volume of the coordinate measuring device.
Beispielsweise kann das Koordinatenmessgerät eingerichtet sein, um das Referenztarget an einen beliebigen Punkt innerhalb des Messvolumens des Koordinatenmessgeräts zu bringen und/oder um das Referenztarget in eine definierte Lage zu bringen.For example, the coordinate measuring machine can be set up to bring the reference target to any point within the measurement volume of the coordinate measuring machine and / or to bring the reference target into a defined position.
Das Referenztarget kann beispielsweise um zwei Achsen drehbar in dem Koordinatenmessgerät angebracht sein. Beispielsweise kann eine Länge der Führung, insbesondere ein Verfahrbereich des Referenztargets, einer Raumdiagonalen eines qualifizierenden Maschinenvolumens des Koordinatenmessgeräts entsprechen. Hierdurch kann für jede Position in dem Maschinenvolumen das Referenztarget bereitgestellt werden. Weiterhin können für jeweilige Messpositionen eine Vielzahl an Oberflächennormalen-Orientierungen bereitgestellt werden. Beispielsweise können eine Verstellung einer Position des Referenztargets entlang einer Verfahrachse und/oder eine Verstellung der ersten Achse und/oder eine Verstellung der zweiten Achse CNC-gesteuert erfolgen.The reference target can, for example, be mounted in the coordinate measuring machine so that it can rotate about two axes. For example, a length of the guide, in particular a travel range of the reference target, can correspond to a spatial diagonal of a qualifying machine volume of the coordinate measuring machine. As a result, the reference target can be provided for each position in the machine volume. Furthermore, a large number of surface normal orientations can be provided for the respective measurement positions. For example, an adjustment of a position of the reference target along a travel axis and / or an adjustment of the first axis and / or an adjustment of the second axis can take place in a CNC-controlled manner.
Die Sensoranordnung kann eingerichtet sein, um zu dem Bezugspunkt einen Bezugswert zu erfassen. Der Bezugswert kann beispielsweise optisch und/oder taktil erfasst werden, beispielsweise durch Erfassung eines optischen Markers und/oder eines taktilen Markers.The sensor arrangement can be set up to detect a reference value for the reference point. The reference value can for example be detected optically and / or tactilely, for example by detecting an optical marker and / or a tactile marker.
Die Auswerte- und Steuereinrichtung kann eingerichtet sein, um aus dem Bezugswert den Fehler des Koordinatenmessgeräts zu erfassen. Der Fehler des Koordinatenmessgeräts kann beispielsweise durch einen Vergleich des Bezugswerts mit einem anderen Wert erfolgen. Der andere Wert kann beispielsweise ein früher erfasster Wert sein. Beispielsweise kann der Bezugswert mit einem Wert verglichen werden, welcher von einer Vorrichtung zur Erfassung einer Lage des Referenztargets bestimmt werden kann.The evaluation and control device can be set up to detect the error of the coordinate measuring machine from the reference value. The error in the coordinate measuring machine can be made, for example, by comparing the reference value with another value. The other value can, for example, be a previously acquired value. For example, the reference value can be compared with a value which can be determined by a device for detecting a position of the reference target.
Das Koordinatenmessgerät kann eine optische Sensorik und/oder eine taktile Sensorik aufweisen. Die Sensoranordnung kann beispielsweise einen optischen Sensor und/oder einen taktilen Sensor aufweisen. Das Koordinatenmessgerät kann eine Multisensorik-Maschine sein. Das Koordinatenmessgerät kann beispielsweise eine 5- oder 6-Achsen-Messmaschine sein.The coordinate measuring machine can be an optical sensor system and / or a tactile sensor system exhibit. The sensor arrangement can for example have an optical sensor and / or a tactile sensor. The coordinate measuring machine can be a multi-sensor machine. The coordinate measuring machine can be, for example, a 5 or 6-axis measuring machine.
Das Referenztarget kann eingerichtet sein, um den Tastarm und/oder den Messkopf und/oder die Sensoranordnung zu kalibrieren.The reference target can be set up to calibrate the probe arm and / or the measuring head and / or the sensor arrangement.
Die Erfindung betrifft weiterhin ein Verfahren zum Kalibrieren eines Koordinatenmessgeräts, mit den Schritten:
- - Bereitstellen eines Koordinatenmessgeräts, wobei das Koordinatenmessgerät eine Auswerte- und Steuereinrichtung und einen Messkopf mit einer Sensoranordnung aufweist;
- - Anordnen einer Referenzanordnung relativ zu dem Messkopf, wobei die Referenzanordnung ein Referenztarget und eine Führung aufweist, wobei das Referenztarget eingerichtet ist, um einen Bezugspunkt zu definieren;
- - Verfahren des Messkopfs entlang der Linearachse relativ zu der Referenzanordnung;
- - Erfassen eines Bezugswerts zu dem Bezugspunkt mittels der Sensoranordnung;
- - Erfassen eines Fehlers des Koordinatenmessgeräts aus dem Bezugswert mittels der Auswerte- und Steuereinrichtung; und
- - Führen des Referenztargets entlang eines Pfads mittels der Führung (
20 ).
- - Provision of a coordinate measuring machine, the coordinate measuring machine having an evaluation and control device and a measuring head with a sensor arrangement;
- Arranging a reference arrangement relative to the measuring head, the reference arrangement having a reference target and a guide, the reference target being set up to define a reference point;
- - Movement of the measuring head along the linear axis relative to the reference arrangement;
- - Detecting a reference value for the reference point by means of the sensor arrangement;
- - Detecting an error in the coordinate measuring machine from the reference value by means of the evaluation and control device; and
- - Guiding the reference target along a path by means of the guide (
20th ).
Beispielsweise können ein oder mehrere der oben genannten Schritte des Verfahrens mehrmals durchgeführt werden, beispielsweise in der genannten Reihenfolge oder in einer sich hiervon unterscheidenden Reihenfolge. Beispielsweise können alle Schritte des Verfahrens wiederholt durchgeführt werden. Beispielsweise können nur einzelne Schritte des Verfahrens wiederholt durchgeführt werden. Beispielsweise können die letzten drei genannten Schritte mehrmals wiederholt werden, also insbesondere ein Erfassen des Bezugswerts, ein Erfassen des Fehlers und ein Führen des Referenztargets.For example, one or more of the above-mentioned steps of the method can be carried out several times, for example in the order mentioned or in a different order. For example, all steps of the method can be carried out repeatedly. For example, only individual steps of the method can be carried out repeatedly. For example, the last three steps mentioned can be repeated several times, that is to say in particular detecting the reference value, detecting the error and guiding the reference target.
Beispielsweise kann das Führen des Referenztargets alternativ zu der genannten Reihenfolge auch vor der Erfassung des Fehlers durchgeführt werden, oder zumindest teilweise zeitlich überlappend.For example, as an alternative to the sequence mentioned, the reference target can also be guided before the error is detected, or at least partially in a temporally overlapping manner.
Beispielsweise kann das Verfahren ein oder mehrere der folgenden weiteren Schritte aufweisen:For example, the method can have one or more of the following further steps:
- - Erfassen eines weiteren Bezugswerts zu dem Bezugspunkt mittels der Sensoranordnung;- Detecting a further reference value for the reference point by means of the sensor arrangement;
- - Erfassen eines weiteren Bezugswerts zu einem weiteren Bezugspunkt mittels der Sensoranordnung;- Detecting a further reference value for a further reference point by means of the sensor arrangement;
- - Erfassen eines weiteren Fehlers des Koordinatenmessgeräts aus dem weiteren Bezugswert mittels der Auswerte- und Steuereinrichtung;- Detecting a further error of the coordinate measuring machine from the further reference value by means of the evaluation and control device;
- - Führen des Referenztargets entlang eines weiteren Pfads mittels der Führung; und- Guiding the reference target along a further path by means of the guide; and
- - Führen des Referenztargets entlang eines Pfads zu einem weiteren Bezugspunkt mittels der Führung.- Guiding the reference target along a path to a further reference point by means of the guide.
Beispielsweise kann nach einer Kalibrierung des Koordinatenmessgeräts die gesamte Referenzanordnung aus dem Messvolumen herausgenommen werden. Danach kann beispielsweise eine Vermessung eines Messobjekts mittels der Sensoranordnung durchgeführt werden.For example, after the coordinate measuring machine has been calibrated, the entire reference arrangement can be removed from the measurement volume. Then, for example, a measurement object can be measured by means of the sensor arrangement.
Es versteht sich, dass die vorstehend genannten und die nachstehend noch zu erläuternden Merkmale nicht nur in der jeweils angegebenen Kombination, sondern auch in anderen Kombinationen oder in Alleinstellung verwendbar sind, ohne den Rahmen der vorliegenden Erfindung zu verlassen.It goes without saying that the features mentioned above and those yet to be explained below can be used not only in the respectively specified combination, but also in other combinations or on their own, without departing from the scope of the present invention.
Ausführungsbeispiele der Erfindung sind in der Zeichnung dargestellt und werden in der nachfolgenden Beschreibung näher erläutert. Es zeigen:
1 ein erstes Ausführungsbeispiel der neuen Referenzanordnung,2 ein zweites Ausführungsbeispiel der neuen Referenzanordnung,3 ein drittes Ausführungsbeispiel der neuen Referenzanordnung,4 ein Referenztarget eines Ausführungsbeispiels der neuen Referenzanordnung, und5 ein Ausführungsbeispiel des neuen Koordinatenmessgeräts in einer Ansicht von schräg vorne.
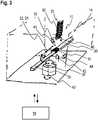
1 a first embodiment of the new reference arrangement,2 a second embodiment of the new reference arrangement,3 a third embodiment of the new reference arrangement,4th a reference target of an exemplary embodiment of the new reference arrangement, and5 an embodiment of the new coordinate measuring machine in a view obliquely from the front.
Das Referenztarget
Eine Länge des Referenztargets
Die Referenzanordnung
Das in
Weiterhin kann die Referenzanordnung
Das in
ZITATE ENTHALTEN IN DER BESCHREIBUNGQUOTES INCLUDED IN THE DESCRIPTION
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.This list of the documents listed by the applicant was generated automatically and is included solely for the better information of the reader. The list is not part of the German patent or utility model application. The DPMA assumes no liability for any errors or omissions.
Zitierte PatentliteraturPatent literature cited
- DE 102008024444 A1 [0002]DE 102008024444 A1 [0002]
- EP 2466250 B1 [0003]EP 2466250 B1 [0003]
Claims (15)
Translated fromGermanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102019134940.0ADE102019134940A1 (en) | 2019-12-18 | 2019-12-18 | Reference arrangement for a coordinate measuring machine, coordinate measuring machine and method for calibrating a coordinate measuring machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102019134940.0ADE102019134940A1 (en) | 2019-12-18 | 2019-12-18 | Reference arrangement for a coordinate measuring machine, coordinate measuring machine and method for calibrating a coordinate measuring machine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| DE102019134940A1true DE102019134940A1 (en) | 2021-06-24 |
Family
ID=76206361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102019134940.0APendingDE102019134940A1 (en) | 2019-12-18 | 2019-12-18 | Reference arrangement for a coordinate measuring machine, coordinate measuring machine and method for calibrating a coordinate measuring machine |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102019134940A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116625242A (en)* | 2023-07-26 | 2023-08-22 | 青岛科技大学 | Path planning method and system for optical three-coordinate measuring machine, electronic equipment and medium |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3325397A1 (en)* | 1982-05-26 | 1985-01-31 | Daimler-Benz Ag, 7000 Stuttgart | Battlement-shaped stepped end measure |
| DE4424871A1 (en)* | 1994-07-14 | 1996-01-18 | Leitz Mestechnik Gmbh | Determining machine-conditioned measurement-errors of coordinate measuring machine |
| US5533271A (en)* | 1994-08-23 | 1996-07-09 | Callaghan, Jr.; Robert P. | Long range sliding ball bar test gage |
| US5671541A (en)* | 1995-09-01 | 1997-09-30 | Brown & Sharpe Manufacturing Company | Accuracy verification devices for coordinate measuring machines |
- 2019
- 2019-12-18DEDE102019134940.0Apatent/DE102019134940A1/enactivePending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3325397A1 (en)* | 1982-05-26 | 1985-01-31 | Daimler-Benz Ag, 7000 Stuttgart | Battlement-shaped stepped end measure |
| DE4424871A1 (en)* | 1994-07-14 | 1996-01-18 | Leitz Mestechnik Gmbh | Determining machine-conditioned measurement-errors of coordinate measuring machine |
| US5533271A (en)* | 1994-08-23 | 1996-07-09 | Callaghan, Jr.; Robert P. | Long range sliding ball bar test gage |
| US5671541A (en)* | 1995-09-01 | 1997-09-30 | Brown & Sharpe Manufacturing Company | Accuracy verification devices for coordinate measuring machines |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116625242A (en)* | 2023-07-26 | 2023-08-22 | 青岛科技大学 | Path planning method and system for optical three-coordinate measuring machine, electronic equipment and medium |
| CN116625242B (en)* | 2023-07-26 | 2023-10-03 | 青岛科技大学 | Optical coordinate measuring machine path planning method, system, electronic equipment and media |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0317967B1 (en) | Rotation-deflection arrangement for the feeler heads of coordinate-measuring devices | |
| DE2535347C2 (en) | Method for measuring cylindrical surfaces | |
| DE2934347C2 (en) | Method and testing device for testing the tooth flank profile of large diameter gears | |
| EP1393012B1 (en) | Method for determining the properties of a co-ordinate measuring device and test object associated therewith | |
| DE102017001750A1 (en) | Inner wall measuring instrument and offset amount calculation method | |
| EP0703430B1 (en) | Procedure to calibrate a coordinate-measuring machine with two rotational axes | |
| DE102008024444A1 (en) | Method for calibrating coordinate measuring device with measuring head, involves arranging reference body in measuring volume relative to coordinate axis of coordinate measuring device which is to be calibrated | |
| EP1316777A1 (en) | Method and device for the three dimensional measuring of workpieces on a machine tool | |
| EP0729005B1 (en) | Measuring device for checking the geometrie and dynamic precision of NC machining tools and industrial robots | |
| DE102017126198B4 (en) | Method and system for gaugeless measurement of a thread | |
| DE68906669T2 (en) | MEASURING SYSTEM FOR A TOOL SETTING IN A MACHINE TOOL. | |
| DE3320983C2 (en) | Portable device for testing the tooth flank profile and tooth flank lines (tooth bevel) of gears on gear cutting machines or tooth flank grinding machines as well as for positioning this device and for orienting the probe on the toothing for the measuring process | |
| DE10126753A1 (en) | Method for increasing the accuracy of coordinate measurement devices and machine tools by incorporation of an additional coordinate measurement system and mathematical optimization of the resultant equation systems | |
| DE102019134940A1 (en) | Reference arrangement for a coordinate measuring machine, coordinate measuring machine and method for calibrating a coordinate measuring machine | |
| DE102006005990B4 (en) | Workpiece measurement for 3-D position detection in several multi-robot stations | |
| DE60032635T2 (en) | METHOD AND DEVICE FOR TESTING TOOLING MACHINES | |
| DE3634688A1 (en) | METHOD AND DEVICE FOR MEASURING GEARS BY MEANS OF A COORDINATE MEASURING DEVICE | |
| DE10319711B4 (en) | Method for high-precision dimensional measurement of measurement objects | |
| DE102020208567B4 (en) | Calibration of a reference body for determining the guidance error of a machine axis | |
| DE102015205566A1 (en) | Calibration of a tactile button attached to a moving part of a CMM | |
| EP1336815A2 (en) | Scanning device for measuring production machines | |
| DE10017394A1 (en) | Method and device for gauging and adjusting the A and C axes of a five-axis milling machine includes path adjusters for fastening a barrel gauge in a milling spindle tool holding fixture and moving it axially. | |
| EP0429857A1 (en) | Method for measuring the deviation between the movements of a machine which are created about a rotational axis and along two translational axes | |
| DE4323992A1 (en) | Check on operational accuracy of numerically controlled machine including robot - involves interpolator in generation of vectors for servo control of sliders guided around circular test track | |
| DE19818405B4 (en) | Method for detecting geometric deviations of at least one axis of a coordinate measuring machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R012 | Request for examination validly filed | ||
| R016 | Response to examination communication |