DE102017220459A1 - A method and trailer docking assistant for assisting a hitching operation of a motor vehicle approaching a trailer rearwardly - Google Patents
A method and trailer docking assistant for assisting a hitching operation of a motor vehicle approaching a trailer rearwardlyDownload PDFInfo
- Publication number
- DE102017220459A1 DE102017220459A1DE102017220459.1ADE102017220459ADE102017220459A1DE 102017220459 A1DE102017220459 A1DE 102017220459A1DE 102017220459 ADE102017220459 ADE 102017220459ADE 102017220459 A1DE102017220459 A1DE 102017220459A1
- Authority
- DE
- Germany
- Prior art keywords
- trailer
- coupling
- motor vehicle
- vehicle
- determined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/002—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles specially adapted for covering the peripheral part of the vehicle, e.g. for viewing tyres, bumpers or the like
- B60R1/003—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles specially adapted for covering the peripheral part of the vehicle, e.g. for viewing tyres, bumpers or the like for viewing trailer hitches
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60D—VEHICLE CONNECTIONS
- B60D1/00—Traction couplings; Hitches; Draw-gear; Towing devices
- B60D1/01—Traction couplings or hitches characterised by their type
- B60D1/06—Ball-and-socket hitches, e.g. constructional details, auxiliary devices, their arrangement on the vehicle
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60D—VEHICLE CONNECTIONS
- B60D1/00—Traction couplings; Hitches; Draw-gear; Towing devices
- B60D1/24—Traction couplings; Hitches; Draw-gear; Towing devices characterised by arrangements for particular functions
- B60D1/36—Traction couplings; Hitches; Draw-gear; Towing devices characterised by arrangements for particular functions for facilitating connection, e.g. hitch catchers, visual guide means, signalling aids
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60D—VEHICLE CONNECTIONS
- B60D1/00—Traction couplings; Hitches; Draw-gear; Towing devices
- B60D1/58—Auxiliary devices
- B60D1/62—Auxiliary devices involving supply lines, electric circuits, or the like
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/13—Edge detection
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Abstract
Translated fromGerman
Description
Translated fromGermanDie Erfindung betrifft ein Verfahren und einen Anhängerankuppelassistenten zum Unterstützen eines Ankuppelvorgangs eines rückwärts an einen Anhänger heranfahrenden Kraftfahrzeugs.The invention relates to a method and a trailer coupling assistant for assisting a coupling operation of a motor vehicle approaching backwards to a trailer.
Zum Ankuppeln eines Anhängers ist es notwendig, zielgerichtet mit einem Kraftfahrzeug zur Deichsel des Anhängers zu fahren. Bei leichten Anhängern reicht es aus, dass man grob in die Nähe der Deichsel fährt und dann den Anhänger zum Kraftfahrzeug schiebt, bis die Deichsel des Anhängers, genauer die so genannte Kugelkopfkupplung des Anhängers, über einem so genannten Kugelkopf des Kraftfahrzeugs angeordnet ist, um dann den Anhänger anzukoppeln. Bei schwereren Anhängern ist eine solche Vorgehensweise nicht möglich. Das heißt, das Kraftfahrzeug muss zielgerichtet rückwärts an den Anhänger herangefahren werden, bis sich die Kugelkopfkupplung des Anhängers exakt über dem Kugelkopf des Kraftfahrzeugs befindet.For coupling a trailer, it is necessary to drive purposefully with a motor vehicle to the drawbar of the trailer. For light trailers, it is sufficient that one rides roughly in the vicinity of the drawbar and then pushes the trailer to the motor vehicle until the drawbar of the trailer, more precisely the so-called ball head coupling of the trailer, is arranged above a so-called ball head of the motor vehicle, then to connect the trailer. For heavier trailers such an approach is not possible. That is, the motor vehicle must be purposefully moved backwards to the trailer until the trailer's ball-and-socket coupling is exactly above the ball head of the motor vehicle.
Wesentlich hierbei ist die Bestimmung einer Einrastposition für den Kugelkopf des Kraftfahrzeugs, also einer entsprechenden Zielposition. Hieran werden hohe Anforderungen an die Genauigkeit gestellt. Der Kugelkopf der fahrzeugseitigen Anhängerkupplung hat üblicherweise einen Durchmesser von 5 Zentimetern. Das heißt, am Ende eines Rangiervorgangs muss die betreffende Anhängerdeichsel mindestens mit 2,5 Zentimeter Abstand zur fahrzeugseitigen Anhängerkupplung stehen, damit beim Herunterkurbeln der Anhängerdeichsel diese mit ihrer Kugelkopfkupplung direkt am Kugelkopf der Anhängerkupplung des Kraftfahrzeugs einrasten kann. Hierbei reicht die reine Erkennung der Deichsel an sich nicht aus. Es muss auch direkt die richtige Stelle der Anhängerdeichsel gefunden werden, an der der Kugelkopf der Anhängerkupplung des Kraftfahrzeugs einrasten kann.Essential here is the determination of a locking position for the ball head of the motor vehicle, ie a corresponding target position. This places high demands on accuracy. The ball head of the vehicle-mounted trailer hitch usually has a diameter of 5 centimeters. That is, at the end of a maneuvering the trailer drawbar must be at least 2.5 centimeters away from the vehicle-mounted trailer hitch so that when cranking the trailer drawbar this can engage with their ball head coupling directly on the ball head of the trailer hitch of the vehicle. Here, the mere detection of the drawbar is not enough. It must also be found directly the right spot of the trailer drawbar on which the ball head of the trailer hitch of the vehicle can engage.
Verfahren zur Unterstützung eines Fahrers eines Kraftfahrzeugs bei einer Rückwärtsfahrt zum Ankuppeln eines Anhängers sind an sich schon bekannt. So zeigt beispielsweise die
Die
Die
Es ist die Aufgabe der vorliegenden Erfindung, eine Möglichkeit bereitzustellen, mittels welcher ein Ankuppelvorgang eines rückwärts an einen Anhänger heranfahrenden Kraftfahrzeugs besonders exakt erfolgen kann.It is the object of the present invention to provide a possibility by means of which a coupling process of a motor vehicle approaching backwards to a trailer can be carried out particularly accurately.
Diese Aufgabe wird durch ein Verfahren sowie durch einen Anhängerankupplungsassistenten zum Unterstützen eines Ankuppelvorgangs mit den Merkmalen der unabhängigen Patentansprüche gelöst. Vorteilhafte Ausgestaltungen mit zweckmäßigen und nicht-trivialen Weiterbildungen der Erfindung sind in den abhängigen Ansprüchen angegeben.This object is achieved by a method and by a trailer coupling assistant for assisting a coupling operation with the features of the independent claims. Advantageous embodiments with expedient and non-trivial developments of the invention are specified in the dependent claims.
Bei dem erfindungsgemäßen Verfahren zum Unterstützen eines Ankuppelvorgangs eines rückwärts an einen Anhänger heranfahrenden Kraftfahrzeug wird eine Kugelkopfkupplung des Anhängers anhand eines mittels einer Kamera des Kraftfahrzeugs aufgezeichneten Kamerabilds erfasst. Das Kamerabild wird danach auf einen Bildausschnitt eingegrenzt, in welchem sich die Kugelkopfkupplung befindet. Wenigstens eine gekrümmte Vorderkante der Kugelkopfkupplung wird innerhalb des eingegrenzten Bildausschnitts detektiert, wobei die Einrastposition für einen fahrzeugseitigen Kugelkopf anhand der wenigstens einen detektierten gekrümmten Vorderkante der Kugelkopfkupplung bestimmt wird.In the method according to the invention for assisting a coupling process of a motor vehicle approaching backwards to a trailer, a ball head coupling of the trailer is detected on the basis of a camera image recorded by means of a camera of the motor vehicle. The camera image is then limited to a picture in which the ball coupling is located. At least one curved leading edge of the ball-and-socket coupling is detected within the bounded image detail, the engagement position for a vehicle-side ball head being determined from the at least one detected curved leading edge of the ball-and-socket coupling.
Die wenigstens eine detektierte Vorderkante der anhängerseitigen Kugelkopfkupplung dient also mit anderen Worten als Referenzgeometrie bei der Bestimmung der Einrastposition für den fahrzeugseitigen Kugelkopf. Mittels der fahrzeugseitigen Kamera wird eine Deichsel und die daran angeordnete Kugelkopfkupplung automatisch erkannt, um basierend darauf automatisch die besagte Einrastposition für den fahrzeugseitigen Kugelkopf zu bestimmen. In einem ersten Schritt wird eine grobe Position des Anhängers und somit der Kugelkopfkupplung des Anhängers bestimmt. Dies erfolgt vorzugsweise basierend auf einer Eckenerkennung. Dies reicht aus, um mit dem Kraftfahrzeug rückwärts an den Anhänger heranzufahren und einen Abstand zwischen der Kugelkopfkupplung des Anhängers und dem fahrzeugseitigen Kugelkopf auf wenige Dezimeter zu verringern, jedoch noch nicht, um das Kraftfahrzeug so zu positionieren, dass ein Einrasten des Kugelkopfs der fahrzeugseitigen Anhängerkupplung zuverlässig erfolgen kann. Daher wird in einem weiteren Schritt die zuvor grob bestimmte Position des Kugelkopfkupplung des Anhängers verwendet, um den Bildausschnitt, in dem sich die Kugelkopfkupplung befindet, einzugrenzen. Mit anderen Worten erfolgt also die Eingrenzung des Kamerabilds auf den Bildausschnitt auf Basis der zuvor erfassten Kugelkopfkupplung des Anhängers.In other words, the at least one detected leading edge of the trailer-side ball-and-socket coupling serves as a reference geometry in determining the latching position for the vehicle-side ball head. By means of the vehicle-mounted camera, a drawbar and the ball-head coupling arranged thereon are automatically recognized, in order to automatically determine the said latching position for the vehicle-side ball-head based thereon. In a first step, a rough position of the Trailer and thus the ball coupling of the trailer determined. This is preferably done based on a corner detection. This is sufficient to bring the motor vehicle backwards to the trailer and to reduce a distance between the ball head coupling of the trailer and the vehicle-side ball head to a few decimeters, but not yet to position the motor vehicle so that a locking of the ball head of the vehicle-mounted trailer hitch can be done reliably. Therefore, in a further step, the previously roughly determined position of the trailer's ball-and-socket coupling is used to confine the image section in which the ball-and-socket coupling is located. In other words, so the limitation of the camera image on the image section based on the previously detected ball coupling of the trailer takes place.
In diesem Bildausschnitt werden nun mit Hilfe einer Bildverarbeitungsoperation, vorzugsweise mittels mehrerer Bildverarbeitungsoperationen, verschiedenste Kanten detektiert. Diese Kanten werden durch verschiedene Parameter gefiltert um letztlich die wenigstens eine gekrümmte Vorderkante der Kugelkopfkupplung innerhalb des eingegrenzten Bildausschnitts zu detektieren. Beispielsweise werden hierzu ganz bestimmte geometrische Eigenschaften der gekrümmten Vorderkante, wie beispielsweise eine bestimmte Krümmung eines Kurvenverlaufs der gekrümmten Vorderkante sowie eine bestimmte Stetigkeit der Krümmung genutzt. Mit Hilfe der wenigstens einen detektierten gekrümmten Vorderkante der Kugelkopfkupplung des Anhängers wird sodann die exakte Einrastposition für den fahrzeugseitigen Kugelkopf bestimmt. Diese bestimmte Einrastposition für den fahrzeugseitigen Kugelkopf kann dann als exakte Zielposition für das Kraftfahrzeug verwendet werden. Beispielsweise ist es möglich, einen automatischen Rangiervorgang des Kraftfahrzeugs in Abhängigkeit von der bestimmten Einrastposition für den fahrzeugseitigen Kugelkopf durchzuführen. In dem Fall wäre es möglich, dass das Kraftfahrzeug teilautonom oder vollautonom rückwärts an den anzukuppelnden Anhänger heranfährt, bis der fahrzeugseitige Kugelkopf der fahrzeugseitigen Anhängerkupplung die bestimmte Einrastposition erreicht hat.In this image section, a variety of edges are now detected by means of an image processing operation, preferably by means of a plurality of image processing operations. These edges are filtered by various parameters to ultimately detect the at least one curved leading edge of the ball-and-socket coupling within the confined image detail. For example, for this very specific geometric properties of the curved leading edge, such as a certain curvature of a curve of the curved leading edge and a certain continuity of the curvature used. With the aid of the at least one detected curved front edge of the ball head coupling of the trailer, the exact locking position for the vehicle-side ball head is then determined. This particular locking position for the vehicle-side ball head can then be used as an exact target position for the motor vehicle. For example, it is possible to perform an automatic maneuvering of the motor vehicle in dependence on the specific locking position for the vehicle-side ball head. In that case, it would be possible for the motor vehicle to move partially autonomously or fully autonomously backwards onto the trailer to be coupled, until the vehicle-side ball head of the vehicle-side trailer coupling has reached the determined latching position.
Es ist also erfindungsgemäß vorgesehen, einen Zusammenhang zwischen der wenigstens einen gekrümmten, also kurvenförmigen Vorderkante der Kugelkopfkupplung oder auch anderer Kanten in einem vorderen Bereich der Kugelkopfkupplung und der Einrastposition für den fahrzeugseitigen Kugelkopf herzustellen, um letztlich die exakte Einrastposition für den fahrzeugseitigen Kugelkopf zu bestimmen. Mittels des erfindungsgemäßen Verfahrens ist es auf besonders exakte Weise möglich, die besagte Einrastposition für den fahrzeugseitigen Kugelkopf zu bestimmen. Insbesondere schwere Anhänger, welche nicht manuell an das Kraftfahrzeug herangeschoben werden können, können mittels des erfindungsgemäßen Verfahrens besonders exakt angekuppelt werden. Denn in Kenntnis der bestimmten Einrastposition für den fahrzeugseitigen Kugelkopf ist es auf einfache Weise möglich, eine Zielposition für das Kraftfahrzeug beim Heranfahren an den anzuhängenden Anhänger vorzugeben.It is therefore provided according to the invention to establish a relationship between the at least one curved, ie curved front edge of the ball coupling or other edges in a front region of the ball coupling and the locking position for the vehicle-side ball to ultimately determine the exact locking position for the vehicle-side ball head. By means of the method according to the invention, it is possible in a particularly exact manner to determine said locking position for the vehicle-side ball head. In particular, heavy trailers, which can not be pushed manually to the motor vehicle, can be coupled particularly accurately by means of the method according to the invention. Because in knowledge of the specific locking position for the vehicle-side ball head, it is possible in a simple manner to specify a target position for the motor vehicle when approaching the trailer to be attached.
Eine vorteilhafte Ausführungsform der Erfindung sieht vor, dass das Kamerabild erst auf den Bildausschnitt eingegrenzt wird, sobald ein vorgegebener Abstand zwischen der Kugelkopfkupplung und dem Kraftfahrzeug durch Heranbewegen des Kraftfahrzeugs unterschritten worden ist. Beispielsweise ist es möglich, diesen Abstand mit 10, 20 oder 30 Zentimetern vorzugeben. Grundsätzlich wird der Abstand so vorgegeben, dass eine gewisse Genauigkeit beim Detektieren der wenigstens einen gekrümmten Vorderkante der Kugelkopfkupplung möglich ist. Wenn das Kraftfahrzeug also rückwärts nah genug an die Kugelkopfkupplung herangefahren ist, erfolgt die Eingrenzung des Kamerabilds auf den Bildausschnitt. Denn je näher das Kraftfahrzeug rückwärts an den Anhänger heranfährt, desto mehr ergibt sich eine Draufsicht auf die Kugelkopfkupplung des Anhängers, aufgrund der üblicherweise vorgesehenen Positionierung der Kamera, bei welcher es sich vorzugsweise um eine Rückfahrkamera des Kraftfahrzeugs handelt. Dadurch, dass der Bildausschnitt erst dann eingegrenzt wird, sobald der vorgegebene Abstand zwischen der Kugelkopfkupplung und dem Kraftfahrzeug unterschritten worden ist, kann sichergestellt werden, dass die Perspektive des Kamerabilds zumindest im Wesentlichen einer Draufsicht auf die Kugelkopfkupplung des Anhängers gleicht. Dies ermöglicht eine besonders exakte Bestimmung der Einrastposition für den fahrzeugseitigen Kugelkopf.An advantageous embodiment of the invention provides that the camera image is limited to the image detail as soon as a predetermined distance between the ball coupling and the motor vehicle has been reached by moving the motor vehicle. For example, it is possible to specify this distance with 10, 20 or 30 centimeters. Basically, the distance is predetermined so that a certain accuracy in detecting the at least one curved front edge of the ball-and-socket coupling is possible. If the motor vehicle is moved backwards close enough to the ball-and-socket coupling, the camera image is limited to the image detail. For the closer the motor vehicle moves backwards to the trailer, the more results in a plan view of the ball coupling of the trailer, due to the usually provided positioning of the camera, which is preferably a rear-view camera of the motor vehicle. The fact that the image section is limited only when the predetermined distance between the ball coupling and the motor vehicle has been reached, it can be ensured that the perspective of the camera image is at least substantially similar to a plan view of the ball coupling of the trailer. This allows a particularly accurate determination of the locking position for the vehicle-side ball head.
Eine weitere vorteilhafte Ausführungsform der Erfindung sieht vor, dass eine Krümmung der wenigstens einen Vorderkante ermittelt und die Einrastposition in Abhängigkeit von der ermittelten Krümmung bestimmt wird. Der Erfindung liegt dabei die Erkenntnis zugrunde, dass die Krümmung der wenigstens einen Vorderkante mit der Einrastposition für den fahrzeugseitigen Kugelkopf relativ zur Kugelkopfkupplung des Anhängers korreliert. Durch die Berücksichtigung der Krümmung der wenigstens einen Vorderkante bei der Bestimmung der Einrastposition kann diese besonders exakt ermittelt werden.A further advantageous embodiment of the invention provides that a curvature of the at least one leading edge is determined and the latching position is determined as a function of the determined curvature. The invention is based on the finding that the curvature of the at least one leading edge correlates with the latching position for the vehicle-side ball head relative to the ball-head coupling of the trailer. By taking into account the curvature of the at least one leading edge in the determination of the latching position, this can be determined particularly accurately.
Gemäß einer weiteren vorteilhaften Ausführungsform der Erfindung ist es vorgesehen, dass anhand der ermittelten Krümmung der wenigstens einen Vorderkante ein Mittelpunkt der Vorderkante bestimmt und dieser als die Einrastposition für den fahrzeugseitigen Kugelkopf festgelegt wird. Insbesondere wird der Mittelpunkt bezogen auf eine Querrichtung und Längsrichtung der Kugelkopfkupplung des Anhängers bestimmt, sodass sich die Einrastposition für den fahrzeugseitigen Kugelkopf zumindest im Wesentlichen mittig unter der vorzugsweise kugelschalenförmigen Kugelkopfkupplung des Anhängers befindet.According to a further advantageous embodiment of the invention, it is provided that, based on the determined curvature of the at least one leading edge, a center of the leading edge is determined and this is determined as the latching position for the vehicle-side ball head. In particular, the center is related to a Transverse direction and longitudinal direction of the ball coupling of the trailer determined so that the locking position for the vehicle-mounted ball head is at least substantially centrally under the preferably spherical shell-shaped ball coupling of the trailer.
In weiterer vorteilhafter Ausgestaltung der Erfindung ist es vorgesehen, dass statische Bereiche des Kamerabilds, insbesondere eine Heckstoßstange des Kraftfahrzeugs, maskiert werden. Solche statischen Bereiche des Kamerabilds, beispielsweise in Form der Heckstoßstange des Kraftfahrzeugs, sind bei der Bestimmung der Einrastposition für den fahrzeugseitigen Kugelkopf nicht wichtig und können gegebenenfalls sogar störend sein. Daher ist es von Vorteil, wenn solche statischen Bereiche des Kamerabilds maskiert werden, sodass solche Bereiche die Bestimmung der Einrastposition für den fahrzeugseitigen Kugelkopf nicht beeinflussen beziehungsweise stören.In a further advantageous embodiment of the invention, it is provided that static areas of the camera image, in particular a rear bumper of the motor vehicle, be masked. Such static areas of the camera image, for example in the form of the rear bumper of the motor vehicle, are not important in the determination of the locking position for the vehicle-side ball head and may possibly even be disturbing. Therefore, it is advantageous if such static areas of the camera image are masked, so that such areas do not influence or disturb the determination of the latching position for the vehicle-side ball head.
Eine weitere vorteilhafte Ausführungsform der Erfindung sieht vor, dass der Bildausschnitt in ein Graustufenbild umgewandelt wird, bevor die wenigstens eine Vorderkante detektiert wird. Dies ist insbesondere ein Vorteil im Hinblick auf verschiedenste Bildverarbeitungsalgorithmen zur Kantendetektion. Denn gewisse Bildverarbeitungsalgorithmen funktionieren erst oder zumindest besser, wenn das auszuwertende Bild nur in Graustufen vorliegt. Dadurch kann die Einrastposition für den fahrzeugseitigen Kugelkopf besonders exakt bestimmt werden.A further advantageous embodiment of the invention provides that the image section is converted into a greyscale image before the at least one leading edge is detected. This is in particular an advantage with regard to a wide variety of image processing algorithms for edge detection. This is because certain image processing algorithms only work better or at least better if the image to be evaluated is only in gray scale. As a result, the latching position for the vehicle-side ball head can be determined particularly accurately.
In weiterer vorteilhafter Ausgestaltung der Erfindung ist es vorgesehen, dass die wenigstens eine Vorderkante mittels des Canny-Algorithmus detektiert wird. Der Canny-Algorithmus ist ein in der digitalen Bildverarbeitung weit verbreiteter, robuster Algorithmus zur Kantendetektion. Er gliedert sich in verschiedene Faltungsoperationen und liefert ein Bild, welches idealerweise nur noch die Kanten des Ausgangsbildes enthält. Mittels des Canny-Algorithmus kann die zumindest eine Vorderkante der Kugelkopfkupplung besonders zuverlässig detektiert werden. Infolgedessen kann unter Verwendung des Canny-Algorithmus auch die Einrastposition für den fahrzeugseitigen Kugelkopf besonders exakt bestimmt werden. Es sind jedoch auch andere Bildverarbeitungsalgorithmen zur Kantenerkennung möglich.In a further advantageous embodiment of the invention, it is provided that the at least one leading edge is detected by means of the Canny algorithm. The Canny algorithm is a robust edge detection algorithm widely used in digital image processing. It is divided into various convolution operations and provides an image which ideally contains only the edges of the output image. By means of the Canny algorithm, the at least one leading edge of the ball coupling can be detected particularly reliably. As a result, using the Canny algorithm, the lock position for the vehicle-side ball head can also be determined particularly accurately. However, other image processing algorithms are also possible for edge detection.
Eine weitere vorteilhafte Ausführungsform der Erfindung sieht vor, dass zumindest eine weitere Vorderkante der Kugelkopfkupplung innerhalb des eingegrenzten Bildausschnitts detektiert und die Einrastposition für den fahrzeugseitigen Kugelkopf anhand der beiden detektierten Vorderkanten bestimmt wird. Vorzugsweise werden jeweilige Krümmungen der Vorderkanten ermittelt, anhand der ermittelten Krümmungen ein Gesamtmittelpunkt der Vorderkanten bestimmt und dieser Gesamtmittelpunkt als die Einrastposition für den fahrzeugseitigen Kugelkopf festgelegt. Es kann von Vorteil sein, mehrere Vorderkanten der Kugelkopfkupplung bei der Bestimmung der Einrastposition für den fahrzeugseitigen Kugelkopf zu berücksichtigen. Insbesondere wenn Krümmungen von mehreren Vorderkanten ermittelt und basierend darauf der besagte Gesamtmittelpunkt der Vorderkanten bestimmt sowie dieser Gesamtmittelpunkt als die Einrastposition für den fahrzeugseitigen Kugelkopf festgelegt wird, kann die Einrastposition für den fahrzeugseitigen Kugelkopf besonders exakt bestimmt werden. Beispielsweise können so aufgrund der Position der fahrzeugseitigen Kamera vorhandene perspektivische Verzerrungen beim Erfassen der Kugelkopfkupplung und letztlich der Vorderkanten der Kugelkopfkupplungen gegebenenfalls kompensiert werden, sodass die Einrastposition für den fahrzeugseitigen Kugelkopf besonders exakt bestimmt werden kann.A further advantageous embodiment of the invention provides that at least one further front edge of the ball-and-socket coupling is detected within the limited image section and the latching position for the vehicle-side ball head is determined on the basis of the two detected leading edges. Preferably, respective curvatures of the leading edges are determined, determined on the basis of the determined curvatures, an overall center of the leading edges and this total center defined as the locking position for the vehicle-side ball head. It may be advantageous to consider several leading edges of the ball-and-socket coupling in determining the latching position for the vehicle-side ball head. In particular, when curvatures are detected from a plurality of leading edges and based thereon said total center of the leading edges is determined and this total center is determined as the engagement position for the vehicle-side ball head, the engagement position for the vehicle-side ball head can be determined particularly accurately. For example, due to the position of the vehicle-side camera existing perspective distortions when detecting the ball coupling and ultimately the leading edges of the ball head couplings can optionally be compensated, so that the locking position for the vehicle-mounted ball head can be determined very accurately.
Der erfindungsgemäße Anhängerankuppelassistent für ein Kraftfahrzeug, ist dazu eingerichtet, das erfindungsgemäße Verfahren und eine vorteilhafte Ausführungsform des erfindungsgemäßen Verfahrens durchzuführen. Vorteilhafte Ausgestaltungen des erfindungsgemäßen Verfahrens sind als vorteilhafte Ausgestaltungen des erfindungsgemäßen Anhängerankuppelassistenten und umgekehrt anzusehen, wobei der Anhängerankuppelassistent insbesondere Mittel zur Durchführung der Verfahrensschritte aufweist. Ferner kann der Anhängerankuppelassistent eine Bildverarbeitungseinrichtung aufweisen, welche dazu eingerichtet ist, die Verfahrensschritte durchzuführen. Der Anhängerankuppelassistent weist vorzugsweise eine Datenschnittstelle auf, um Bilddaten von der fahrzeugseitigen Kamera zu empfangen. Auch kann der Anhängerankuppelassistent beispielsweise als Nachrüstlösung ausgebildet sein, welche - entsprechende fahrzeugseitige Schnittstellen vorausgesetzt - einfach in beliebigen Kraftfahrzeugen nachgerüstet werden kann. Natürlich ist es auch möglich, dass der Anhängerankuppelassistent von vornerein bei der Produktion eines Kraftfahrzeugs vorgesehen wird.The trailer coupling assistant according to the invention for a motor vehicle is set up to carry out the method according to the invention and an advantageous embodiment of the method according to the invention. Advantageous embodiments of the method according to the invention are to be regarded as advantageous embodiments of the invention Anhängerabuppelassistenten and vice versa, wherein the Anhängerankuppelassistent particular means for performing the method steps. Furthermore, the trailer coupling assistant can have an image processing device which is set up to carry out the method steps. The trailer docking assistant preferably has a data interface to receive image data from the vehicle-mounted camera. The trailer coupling assistant can also be designed, for example, as a retrofit solution, which - assuming appropriate vehicle-side interfaces - can be easily retrofitted in any motor vehicle. Of course, it is also possible that the trailer coupling assistant is provided from the outset in the production of a motor vehicle.
Das erfindungsgemäße Kraftfahrzeug umfasst den erfindungsgemäßen Anhängerankuppelassistenten oder eine vorteilhafte Ausführungsform des erfindungsgemäßen Anhängerankuppelassistenten.The motor vehicle according to the invention comprises the trailer-coupling assistant according to the invention or an advantageous embodiment of the trailer-coupling assistant according to the invention.
Weitere Vorteile, Merkmale und Einzelheiten der Erfindung ergeben sich aus der nachfolgenden Beschreibung eines bevorzugten Ausführungsbeispiels sowie anhand der Zeichnung. Die vorstehend in der Beschreibung genannten Merkmale und Merkmalskombinationen sowie die nachfolgend in der Figurenbeschreibung genannten und/oder in den Figuren alleine gezeigten Merkmale und Merkmalskombinationen sind nicht nur in der jeweils angegebenen Kombination, sondern auch in anderen Kombinationen oder in Alleinstellung verwendbar, ohne den Rahmen der Erfindung zu verlassen.Further advantages, features and details of the invention will become apparent from the following description of a preferred embodiment and from the drawing. The features and feature combinations mentioned above in the description as well as the features and feature combinations mentioned below in the description of the figures and / or shown alone in the figures are not only in each case specified combination, but also in other combinations or alone, without departing from the scope of the invention.
Die Zeichnung zeigt in:
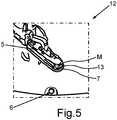
1 eine Draufsicht auf einen Ankuppelvorgang eines rückwärts an einen Anhänger heranfahrenden Kraftfahrzeugs;2 eine Seitenansicht des Kraftfahrzeugs, nachdem dieses an den Anhänger angekuppelt worden ist;3 ein mittels einer Rückfahrkamera des Kraftfahrzeugs aufgezeichnetes Kamerabild während das Kraftfahrzeug rückwärts an den Anhänger heranfährt;4 einen eingegrenzten Bildausschnitt des mittels der Rückfahrkamera aufgezeichneten Kamerabilds, in welchem eine Kugelkopfkupplung des Anhängers und ein fahrzeugseitiger Kugelkopf zu erkennen sind; und in5 eine weitere Darstellung des eingegrenzten Bildausschnitts, wobei zwei detektierte Vorderkanten der Kugelkopfkupplung des Anhängers optisch hervorgehoben sind, die zur Bestimmung einer Einrastposition für den fahrzeugseitigen Kugelkopf dienen.
1 a plan view of a Ankuppelvorgang a approaching backwards to a trailer motor vehicle;2 a side view of the motor vehicle after it has been coupled to the trailer;3 a camera image recorded by means of a reversing camera of the motor vehicle while the motor vehicle is backing up to the trailer;4 a limited image section of the camera image recorded by means of the reversing camera, in which a ball-head coupling of the trailer and a vehicle-side ball head can be seen; and in5 a further representation of the limited image detail, wherein two detected leading edges of the ball head coupling of the trailer are highlighted, which serve to determine a locking position for the vehicle-side ball head.
In den Figuren sind gleiche oder funktionsgleiche Elemente mit den gleichen Bezugszeichen versehen worden.In the figures, identical or functionally identical elements have been provided with the same reference numerals.
Ein Ankuppelvorgang eines rückwärtsfahrenden Kraftfahrzeugs
In
Um die besagte Einrastposition
In
In
In
Vorzugsweise werden mehrere Bildverarbeitungsoperationen verwendet, um verschiedene Kanten innerhalb des Bildausschnitts
Innerhalb des Bildausschnitts
Dafür werden beispielsweise jeweilige, hier nicht näher bezeichnete Mittelpunkte der kurvenförmigen Vorderkanten
In Kenntnis der so bestimmten Einrastposition
Mit Hilfe des beschriebenen Verfahrens und des beschriebenen Anhängerankuppelassistenten
BezugszeichenlisteLIST OF REFERENCE NUMBERS
- 11
- Kraftfahrzeugmotor vehicle
- 22
- Anhängerpendant
- 33
- Trajektorietrajectory
- 44
- Anhängerdeichseldrawbar
- 55
- Kugelkopfkupplung des AnhängersBall coupling of the trailer
- 66
- Kugelkopf des KraftfahrzeugsBall head of the motor vehicle
- 77
- Vorderkante der KugelkopfkupplungLeading edge of the ball end coupling
- 88th
- AnhängerankuppelassistentAffectionate Gera dome Assistant
- 99
- Rückfahrkamerabackup camera
- 1010
- Kamerabild der RückfahrkameraCamera image of the reversing camera
- 1111
- Heckstoßstange des KraftfahrzeugsRear bumper of the motor vehicle
- 1212
- Bildausschnitt des Kamerabilds der RückfahrkameraImage section of the camera image of the reversing camera
- 13 13
- Vorderkante der KugelkopfkupplungLeading edge of the ball end coupling
- MM
- GesamtmittelpunktTotal center
- PP
- Einrastposition für den Kugelkopf des KraftfahrzeugsSnap-in position for the ball head of the motor vehicle
ZITATE ENTHALTEN IN DER BESCHREIBUNG QUOTES INCLUDE IN THE DESCRIPTION
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.This list of the documents listed by the applicant has been generated automatically and is included solely for the better information of the reader. The list is not part of the German patent or utility model application. The DPMA assumes no liability for any errors or omissions.
Zitierte PatentliteraturCited patent literature
- DE 102014212041 A1 [0004]DE 102014212041 A1 [0004]
- DE 102010004920 A1 [0005]DE 102010004920 A1 [0005]
- DE 102016122916 A1 [0006]DE 102016122916 A1 [0006]
Claims (11)
Translated fromGermanPriority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017220459.1ADE102017220459B4 (en) | 2017-11-16 | 2017-11-16 | Method and trailer coupling assistant for supporting a coupling process of a motor vehicle reversing towards a trailer, and motor vehicle |
| US16/764,549US11186224B2 (en) | 2017-11-16 | 2018-11-12 | Method and trailer-coupling assistance for assisting in the coupling process of a transportation vehicle reversing toward a trailer |
| PCT/EP2018/080967WO2019096746A1 (en) | 2017-11-16 | 2018-11-12 | Method and trailer-coupling assistance for assisting in the coupling process of a motor vehicle reversing towards a trailer |
| EP18803622.2AEP3710288B1 (en) | 2017-11-16 | 2018-11-12 | Method and trailer-coupling assistance for assisting in the coupling process of a motor vehicle reversing towards a trailer |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017220459.1ADE102017220459B4 (en) | 2017-11-16 | 2017-11-16 | Method and trailer coupling assistant for supporting a coupling process of a motor vehicle reversing towards a trailer, and motor vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| DE102017220459A1true DE102017220459A1 (en) | 2019-05-16 |
| DE102017220459B4 DE102017220459B4 (en) | 2023-10-19 |
Family
ID=64316532
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102017220459.1AExpired - Fee RelatedDE102017220459B4 (en) | 2017-11-16 | 2017-11-16 | Method and trailer coupling assistant for supporting a coupling process of a motor vehicle reversing towards a trailer, and motor vehicle |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11186224B2 (en) |
| EP (1) | EP3710288B1 (en) |
| DE (1) | DE102017220459B4 (en) |
| WO (1) | WO2019096746A1 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3786010A1 (en)* | 2019-09-02 | 2021-03-03 | Volkswagen Ag | Collision avoidance when a vehicle approaches a tow bar |
| EP3967572A1 (en) | 2020-09-15 | 2022-03-16 | Volkswagen Ag | Automatic selection of one of a plurality of parking assist functions in a motor vehicle |
| DE102021212176B3 (en) | 2021-10-28 | 2022-10-06 | Volkswagen Aktiengesellschaft | Method for providing a display in a motor vehicle and motor vehicle |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12286156B2 (en)* | 2020-05-08 | 2025-04-29 | Ford Global Technologies, Llc | Trailer GPS location storage and recall for hitch assist operation |
| DE102020003141A1 (en)* | 2020-05-26 | 2021-12-02 | Jost-Werke Deutschland Gmbh | Driver assistance system and method for coupling a trailer to a towing vehicle |
| US11676300B2 (en)* | 2020-12-09 | 2023-06-13 | Continental Autonomous Mobility US, LLC | Method for real-time tow ball detection |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010004920A1 (en) | 2010-01-19 | 2011-07-21 | ZF Lenksysteme GmbH, 73527 | Device for support of coupling trailer to trailer coupling of motor car e.g. passenger car, controls relative movement of trailer coupling of motor car based on determined relative position of trailer coupling of trailer |
| DE102014212041A1 (en) | 2014-06-24 | 2015-12-24 | Robert Bosch Gmbh | A method for assisting the driver of a motor vehicle in a reverse drive for coupling a trailer |
| DE102016122916A1 (en) | 2015-12-01 | 2017-06-01 | GM Global Technology Operations LLC | Guided towbar control system and method |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7568716B2 (en)* | 2005-05-13 | 2009-08-04 | Dietz Dan L | Method and apparatus for alignment of trailer hitch |
| US20070216136A1 (en)* | 2006-03-15 | 2007-09-20 | Dietz Dan L | Single camera apparatus and methods for alignment of a trailer hitch |
| US8888121B2 (en)* | 2007-01-25 | 2014-11-18 | Target Hitch Llc | Towing vehicle guidance for trailer hitch connection |
| US20100324770A1 (en) | 2007-07-03 | 2010-12-23 | J. Edward Ramsey | Trailer hitch alignment device and method |
| US7777615B2 (en) | 2008-03-20 | 2010-08-17 | Toyota Motor Engineering & Manufacturing North America, Inc. | System for assisting the attachment of a trailer to a vehicle |
| DE102009029439A1 (en) | 2009-09-14 | 2011-03-24 | Robert Bosch Gmbh | Method and device for representing obstacles in a parking assistance system of motor vehicles |
| US9085261B2 (en)* | 2011-01-26 | 2015-07-21 | Magna Electronics Inc. | Rear vision system with trailer angle detection |
| DE102012001380A1 (en) | 2012-01-24 | 2012-08-02 | Daimler Ag | Assistance method for coupling maneuver of motor car with trailer coupling at trailer hitch pan using driver assistance system, involves overlying screen display of image with trajectory between trailer coupling and clutch pan |
| DE102012005707A1 (en) | 2012-03-20 | 2012-10-18 | Daimler Ag | Method for coupling trailer of motor vehicle by automatic cross-guiding of motor vehicle with rear camera during maneuvering, involves defining target sector by spherical head of coupling device of motor vehicle |
| US20140125795A1 (en)* | 2012-11-05 | 2014-05-08 | James Arnold Yerke | Trailer Coupling Assistant |
| GB2513393B (en)* | 2013-04-26 | 2016-02-03 | Jaguar Land Rover Ltd | Vehicle hitch assistance system |
| US20150115571A1 (en)* | 2013-10-24 | 2015-04-30 | GM Global Technology Operations LLC | Smart tow |
| CN105082910B (en)* | 2014-05-07 | 2018-01-26 | 通用汽车环球科技运作有限责任公司 | Aid in the system and method that delivery vehicle is attached to trailer |
| US10259453B2 (en)* | 2015-04-10 | 2019-04-16 | Continental Automotive Systems, Inc. | Collision avoidance based on front wheel off tracking during reverse operation |
| CN106203237A (en)* | 2015-05-04 | 2016-12-07 | 杭州海康威视数字技术股份有限公司 | The recognition methods of container-trailer numbering and device |
| US20160375831A1 (en)* | 2015-06-23 | 2016-12-29 | GM Global Technology Operations LLC | Hitching assist with pan/zoom and virtual top-view |
| US9696723B2 (en)* | 2015-06-23 | 2017-07-04 | GM Global Technology Operations LLC | Smart trailer hitch control using HMI assisted visual servoing |
| US10155478B2 (en)* | 2015-12-17 | 2018-12-18 | Ford Global Technologies, Llc | Centerline method for trailer hitch angle detection |
| US10259390B2 (en)* | 2016-05-27 | 2019-04-16 | GM Global Technology Operations LLC | Systems and methods for towing vehicle and trailer with surround view imaging devices |
| DE102017211395B4 (en) | 2016-08-05 | 2024-03-14 | Volkswagen Aktiengesellschaft | Method for supporting a coupling process and support system |
| US10046800B2 (en)* | 2016-08-10 | 2018-08-14 | Ford Global Technologies, Llc | Trailer wheel targetless trailer angle detection |
| US11014561B2 (en)* | 2017-02-01 | 2021-05-25 | Magna Electronics Inc. | Vehicle trailer hitch assist system |
| US10654415B2 (en)* | 2017-04-28 | 2020-05-19 | GM Global Technology Operations LLC | System and method for determining a starting point of a guidance line for attaching a trailer to a trailer hitch mounted in a cargo bed of a vehicle |
| US10266023B2 (en)* | 2017-05-01 | 2019-04-23 | Ford Global Technologies, Llc | System to automate hitching a trailer |
- 2017
- 2017-11-16DEDE102017220459.1Apatent/DE102017220459B4/ennot_activeExpired - Fee Related
- 2018
- 2018-11-12WOPCT/EP2018/080967patent/WO2019096746A1/ennot_activeCeased
- 2018-11-12USUS16/764,549patent/US11186224B2/enactiveActive
- 2018-11-12EPEP18803622.2Apatent/EP3710288B1/enactiveActive
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010004920A1 (en) | 2010-01-19 | 2011-07-21 | ZF Lenksysteme GmbH, 73527 | Device for support of coupling trailer to trailer coupling of motor car e.g. passenger car, controls relative movement of trailer coupling of motor car based on determined relative position of trailer coupling of trailer |
| DE102014212041A1 (en) | 2014-06-24 | 2015-12-24 | Robert Bosch Gmbh | A method for assisting the driver of a motor vehicle in a reverse drive for coupling a trailer |
| DE102016122916A1 (en) | 2015-12-01 | 2017-06-01 | GM Global Technology Operations LLC | Guided towbar control system and method |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3786010A1 (en)* | 2019-09-02 | 2021-03-03 | Volkswagen Ag | Collision avoidance when a vehicle approaches a tow bar |
| EP3967572A1 (en) | 2020-09-15 | 2022-03-16 | Volkswagen Ag | Automatic selection of one of a plurality of parking assist functions in a motor vehicle |
| DE102020211549A1 (en) | 2020-09-15 | 2022-03-17 | Volkswagen Aktiengesellschaft | Automatically selecting one of a plurality of parking assistance functions in a motor vehicle |
| DE102021212176B3 (en) | 2021-10-28 | 2022-10-06 | Volkswagen Aktiengesellschaft | Method for providing a display in a motor vehicle and motor vehicle |
| EP4173893A1 (en)* | 2021-10-28 | 2023-05-03 | Volkswagen Ag | Method for providing a display in a motor vehicle, and motor vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019096746A1 (en) | 2019-05-23 |
| US11186224B2 (en) | 2021-11-30 |
| EP3710288B1 (en) | 2023-04-05 |
| DE102017220459B4 (en) | 2023-10-19 |
| US20200276934A1 (en) | 2020-09-03 |
| EP3710288A1 (en) | 2020-09-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102017220459B4 (en) | Method and trailer coupling assistant for supporting a coupling process of a motor vehicle reversing towards a trailer, and motor vehicle | |
| EP2987663B1 (en) | Driver assistance system for a commercial vehicle trailer assembly and method for performing a coupling procedure | |
| EP2272691B1 (en) | Method for determining a position of a trailer attached to a vehicle relative to the vehicle and driver assistance system for a vehicle | |
| DE102019008316A1 (en) | Method for object recognition and distance determination | |
| EP2581892B1 (en) | Distance measuring system and method for measuring distance, in particular between a vehicle and its surroundings | |
| DE102004050149A1 (en) | Drawbar and trailer angle determining method, involves ascertaining drawbar and trailer`s characteristic edges and lines from video stream of sensor e.g. video camera, and determining angles from geometrical conditions of characteristic | |
| DE102011104256A1 (en) | Bend angle sensor for driver assistance system of motor car formed for drawing trailer with drawbar, has computing unit comparing image features with current image to determine bend angle, where features are stored in calibration phase | |
| DE102016011324A1 (en) | A method of controlling a towing vehicle as it approaches and hitches to a trailer vehicle | |
| WO2006042665A1 (en) | Method for determining shaft and trailer angles | |
| DE102016116859A1 (en) | Sensor arrangement for an autonomously operated commercial vehicle and a method for round imaging | |
| DE102016115130A1 (en) | Automated parking of a motor vehicle with a trailer | |
| DE102014223141B4 (en) | Determining a position of a trailer hitch head | |
| DE102011113191B4 (en) | Method and device for determining an articulation angle between a vehicle and a trailer | |
| EP3599115B1 (en) | Method and system for automated detection of a coupling manoeuvre of a motor vehicle to a trailer | |
| EP3477249A1 (en) | Method for shape recognition of an object in an external area of a motor vehicle and motor vehicle | |
| DE102018005118A1 (en) | Method for determining a kink angle | |
| DE102022003183A1 (en) | Coupling device for a towing vehicle with an object recognition means attached thereto | |
| DE102015210816A1 (en) | Determining a length of a trailer | |
| EP3476696A1 (en) | Method for determining object boundaries of an object in an external area of a motor vehicle and control device and motor vehicle | |
| EP3199429B1 (en) | Method for assisting a driver of a motor vehicle in a parking manoeuvre with border stone, driver assistance system and motor vehicle | |
| DE102018214973A1 (en) | Method and system for automatically recognizing a coupling maneuver of a motor vehicle to a trailer | |
| EP4163133B1 (en) | Method for supporting during a coupling process with a trailer, computing device and assistance system for a vehicle | |
| WO2023156564A1 (en) | Attachment aid for a vehicle trailer | |
| DE102018104963A1 (en) | A method of assisting a user of a motor vehicle when parking in a parking lot, corresponding computer program product, support system and motor vehicle | |
| DE102008020839A1 (en) | Method and device for determining a position and / or an orientation of a camera |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R012 | Request for examination validly filed | ||
| R016 | Response to examination communication | ||
| R016 | Response to examination communication | ||
| R018 | Grant decision by examination section/examining division | ||
| R020 | Patent grant now final | ||
| R119 | Application deemed withdrawn, or ip right lapsed, due to non-payment of renewal fee |