DE102016212688A1 - Method and device for determining the environment of a vehicle - Google Patents
Method and device for determining the environment of a vehicleDownload PDFInfo
- Publication number
- DE102016212688A1 DE102016212688A1DE102016212688.1ADE102016212688ADE102016212688A1DE 102016212688 A1DE102016212688 A1DE 102016212688A1DE 102016212688 ADE102016212688 ADE 102016212688ADE 102016212688 A1DE102016212688 A1DE 102016212688A1
- Authority
- DE
- Germany
- Prior art keywords
- vehicle
- environment
- data
- environment data
- obstacles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


Classifications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096791—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is another vehicle
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3848—Data obtained from both position sensors and additional sensors
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
- G06V20/54—Surveillance or monitoring of activities, e.g. for recognising suspicious objects of traffic, e.g. cars on the road, trains or boats
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/584—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of vehicle lights or traffic lights
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096716—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information does not generate an automatic action on the vehicle control
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096733—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place
- G08G1/096741—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place where the source of the transmitted information selects which information to transmit to each vehicle
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096733—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place
- G08G1/09675—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place where a selection from the received information takes place in the vehicle
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4026—Cycles
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/65—Data transmitted between vehicles
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2756/00—Output or target parameters relating to data
- B60W2756/10—Involving external transmission of data to or from the vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Automation & Control Theory (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
Abstract
Translated fromGermanDescription
Translated fromGermanFahrzeuge werden zunehmend mit Systemen ausgerüstet, welche aus Kamerabildern ein Anzeigenbild errechnen, welche den Fahrer des Fahrzeugs bei der Durchführung von Fahrmanövern, beispielsweise Einparken oder Rückwärtsfahren, unterstützt. Während des Fahrens trifft der Fahrer des Fahrzeugs durch Unterstützung eines solchen Systems Entscheidungen, um sein Fahrzeug sicher im Straßenverkehr zu lenken. Darüber hinaus kann ein solches bildgebendes System den Fahrer bei seiner Orientierung in der Umgebung unterstützen, so dass er beispielsweise leichter zu seinem Fahrziel gelangen kann. Um dem Fahrer ein möglichst realistisches Bild der Fahrzeugumgebung zu geben, werden auch zunehmend dreidimensionale Anzeigebilder auf einer Fahrzeuganzeige dargestellt, um den Fahrer bei der Entscheidungsfindung und Orientierung möglichst effizient zu unterstützen.Vehicles are increasingly being equipped with systems that compute camera images of an ad image that assists the driver of the vehicle in performing driving maneuvers, such as parking or reversing. During driving, the driver of the vehicle makes decisions by assisting such a system to steer his vehicle safely on the road. In addition, such an imaging system can assist the driver in his orientation in the environment, so that he can, for example, easier to get to his destination. In order to give the driver the most realistic possible picture of the vehicle environment, three-dimensional display images are also increasingly displayed on a vehicle display in order to assist the driver in the decision-making and orientation as efficiently as possible.
Bei solchen Systemen kommt es in vielen Fällen vor, dass andere Verkehrsteilnehmer, wie z.B. andere Fahrzeuge, Fussgänger oder Hindernisse, vollständig oder teilweise durch andere Objekte verdeckt sind, so dass eine realistische Anzeige des verdeckten Verkehrsteilnehmers nicht möglich ist. Beispielsweise handelt es sich hierbei um eine Verkehrssituation, bei dem sich ein Fahrzeug und weitere Fahrzeugobjekte auf einer mehrspurigen Straße begegnen. Überholt im Gegenverkehr ein erstes Fahrzeugobjekt ein zweites Fahrzeugobjekt und verdeckt das erste Fahrzeugobjekt das zweite Fahrzeugobjekt zumindest teilweise, so können an dem Fahrzeug befindliche Kameras das überholte zweite Fahrzeugobjekt unter Umständen nur teilweise oder sogar gar nicht erfassen. Hierdurch bedingt kann der Fahrer bei einer Fahrentscheidung und seiner Orientierung im Verkehrsfluss unter Umständen eine falsche Entscheidung treffen.In such systems, it often happens that other road users, e.g. other vehicles, pedestrians or obstacles are completely or partially obscured by other objects, so that a realistic display of the concealed road user is not possible. For example, this is a traffic situation in which a vehicle and other vehicle objects meet on a multi-lane road. If a first vehicle object overtakes a second vehicle object in oncoming traffic and the first vehicle object at least partially covers the second vehicle object, then cameras located on the vehicle may only partially or even not detect the outdated second vehicle object under certain circumstances. As a result, the driver may make a wrong decision in a driving decision and its orientation in the flow of traffic under certain circumstances.
Zur realistischen und eindeutigen Darstellung der in der Umgebung eines Fahrzeugs befindlichen Objekte ist z.B. aus der
Obwohl eine Vielzahl von Fahrzeugen mittlerweile mit mehreren Kameras, die an unterschiedlichen Stellen des Fahrzeugs angeordnet sind, ausgestattet sind, ist der Erfassungsbereich unter Umständen nicht groß genug, um von anderen Objekten verdeckte Verkehrsteilnehmer oder Hindernisse sicher zu erfassen. Dadurch ist die Unterstützung von Fahrmanövern durch Fahrerassistenzsysteme mit teil- oder hochautonomen Fahrfunktionen nur eingeschränkt möglich.Although a variety of vehicles are now equipped with multiple cameras located at different locations on the vehicle, the coverage area may not be large enough to safely detect obscured road users or obstacles from other objects. Thus, the support of driving maneuvers by driver assistance systems with partially or highly autonomous driving functions is limited.
Es ist Aufgabe der vorliegenden Erfindung ein Verfahren und eine Vorrichtung zur Ermittlung des Umfelds eines Fahrzeugs anzugeben, bei denen Objekte in einem weiten Umfeld des Fahrzeugs sicher erkannt werden, so dass der Fahrer bei Fahrentscheidungen und seiner Orientierung im Verkehrsfluss effizient unterstützt wird und Fahrentscheidungen durch teil- oder hochautomatisierte Fahrerassistenzsysteme übernommen werden können.It is an object of the present invention to provide a method and a device for determining the environment of a vehicle in which objects are reliably detected in a wide environment of the vehicle, so that the driver is efficiently supported in driving decisions and its orientation in the flow of traffic and driving decisions by part - or highly automated driver assistance systems can be adopted.
Diese Aufgabe wird durch ein Verfahren gemäß den Merkmalen des Patentanspruchs 1 und eine Vorrichtung gemäß den Merkmalen des Patentanspruchs 12 gelöst. Vorteilhafte Ausgestaltungen finden sich in den abhängigen Patentansprüchen.This object is achieved by a method according to the features of patent claim 1 and a device according to the features of
Die Erfindung schafft ein Verfahren zur Ermittlung des Umfelds eines Fahrzeugs, mit den Schritten:
Bereitstellen von ersten Umfelddaten, die mit einer Umfeldsensorik eines ersten Fahrzeugs gewonnen werden, wobei die ersten Umfelddaten zumindest Objektdaten anderer Verkehrsteilnehmer und/oder Hindernisse im Umfeld des ersten Fahrzeugs umfassen;
Übertragen der ersten Umfelddaten an ein zweites Fahrzeug;
Verarbeiten der ersten Umfelddaten durch das zweite Fahrzeug, wodurch das Umfeld des zweiten Fahrzeugs ermittelt wird.The invention provides a method for determining the environment of a vehicle, comprising the steps:
Providing first environment data obtained with an environment sensor system of a first vehicle, wherein the first environment data include at least object data of other road users and / or obstacles in the vicinity of the first vehicle;
Transmitting the first environment data to a second vehicle;
Processing the first environment data by the second vehicle, whereby the environment of the second vehicle is determined.
Die Umfeldsensorik des ersten Fahrzeugs, das in Bezug auf das zweite Fahrzeug ein vorausfahrendes oder nachfolgendes Fahrzeug sein kann, kann eine oder mehrere Kameras und/oder ein Radarsystem und/oder Lidarsystem umfassen. Die von der Umfeldsensorik gewonnenen ersten Umfelddaten umfassen Objektdaten. Die Objektdaten repräsentieren das Vorhandensein und örtliche Informationen anderer Verkehrsteilnehmer. Örtliche Informationen können beispielsweise durch GPS-Koordinaten bereitgestellt werden, welche aus der bekannten Position des ersten Fahrzeugs und der Analyse der ersten Umfelddaten gewonnen werden können. Die Objektdaten können um Fahrzeugsignale, wie z.B. eine Geschwindigkeit des ersten Fahrzeugs sowie der durch die Umfeldsensorik erfassten anderen Verkehrsteilnehmer, ergänzt sein. Andere Verkehrsteilnehmer können andere Fahrzeuge, Zweiräder, Personen oder Radfahrer sein. Unter Hindernissen im Sinne der vorliegenden Erfindung sind stehende Fahrzeuge, Stauenden, Schranken (z.B. Bahnschranken), kreuzende Verkehrsteilnehmer, aber auch statische Hindernisse, wie z.B. Bäume und dergleichen, zu verstehen.The environment sensor system of the first vehicle, which may be a preceding or following vehicle with respect to the second vehicle, may include one or more cameras and / or a radar system and / or lidar system. The first environmental data obtained from the environmental sensor system comprises object data. The object data represents the presence and local information of other road users. Local information can be provided, for example, by GPS coordinates, which can be obtained from the known position of the first vehicle and the analysis of the first environment data. The object data may be supplemented by vehicle signals, such as a speed of the first vehicle and the other road users detected by the surroundings sensor system. Other road users can use others Vehicles, bicycles, people or cyclists. Under obstacles in the context of the present invention are standing vehicles, jam ends, barriers (eg railway barriers), crossing road users, but also static obstacles, such as trees and the like to understand.
Durch die Verarbeitung der von dem ersten Fahrzeug gewonnenen ersten Umfelddaten durch das zweite Fahrzeug wird das „Sichtfeld“ des zweiten Fahrzeugs nach vorne und/oder hinten erweitert, wodurch einerseits der Fahrer bei Fahrentscheidungen und seiner Orientierung im Verkehrsfluss effizient unterstützt wird und andererseits teil- oder hochautomatisierte Fahrfunktionen von Fahrerassistenzsystemen des Fahrzeugs mit präziseren Daten versorgt werden können.By processing the first environment data obtained by the first vehicle by the second vehicle, the "field of view" of the second vehicle is extended forwards and / or backwards, which on the one hand efficiently supports the driver in driving decisions and his orientation in the traffic flow and on the other hand partially or highly automated driving functions of driver assistance systems of the vehicle can be supplied with more precise data.
Gemäß einer zweckmäßigen Ausgestaltung umfasst der Schritt des Bereitstellens der ersten Umfelddaten zusätzlich das Bereitstellen von Umfelddaten, die mit einer Umfeldsensorik eine Infrastrukturkomponente gewonnen werden. Gemäß dieser Ausgestaltung wird das Sichtfeld des zweiten Fahrzeugs nicht nur mit, durch das erste Fahrzeug erfassten, ersten Umfelddaten erweitert, sondern zusätzlich mit Umfelddaten, die durch eine Infrastrukturkomponente gewonnen werden. Zu solchen Infrastrukturkomponenten zählen beispielsweise Kamerasysteme an Tunneln, Kreuzungen und dergleichen.According to an expedient embodiment, the step of providing the first environment data additionally comprises the provision of environment data which are obtained with an environment component of an infrastructure component. According to this embodiment, the field of vision of the second vehicle is expanded not only with first environment data acquired by the first vehicle, but additionally with environment data obtained by an infrastructure component. Such infrastructure components include, for example, camera systems on tunnels, intersections and the like.
Eine weitere Ausgestaltung sieht vor, dass als erste Umfelddaten Bildinformationen ermittelt werden, indem Bilddaten der Umgebung durch die Umfeldsensorik des ersten Fahrzeugs und/oder durch die Infrastrukturkomponente erfasst und die Bilddaten zu den Bildinformationen verarbeitet werden. Hierzu verfügt das erste Fahrzeug, wie eingangs erwähnt, über eine oder mehrere Kameras zur Erfassung und Erzeugung von Bilddaten der Umgebung. Alternativ oder zusätzlich können die von einer oder mehreren Kameras der Infrastrukturkomponente bereitgestellten Bilddaten zu den Bildinformationen verarbeitet werden, um dann als erste Umfelddaten bereitgestellt zu werden.A further embodiment provides that image information is determined as the first environment data by capturing image data of the environment by the environmental sensor system of the first vehicle and / or by the infrastructure component and processing the image data into the image information. For this purpose, the first vehicle, as mentioned above, has one or more cameras for capturing and generating image data of the environment. Alternatively or additionally, the image data provided by one or more cameras of the infrastructure component can be processed into the image information in order to then be provided as the first environment data.
Es ist weiterhin zweckmäßig, wenn als erste Umfelddaten der Ort einer Verkehrsweg-Infrastrukturkomponente, umfassend zumindest ein Verkehrszeichen oder eine Fahrspur, ermittelt wird. Diese Informationen können, wie unten beschrieben wird, einerseits zur Visualisierung für den Fahrer des zweiten Fahrzeugs genutzt werden. Andererseits können beispielsweise von einem vorausfahrenden ersten Fahrzeug gewonnene Informationen über ein Verkehrszeichen dazu genutzt werden, die Fahrstrategie eines Fahrerassistenzsystems anzupassen.It is furthermore expedient if the location of a traffic route infrastructure component comprising at least one traffic sign or lane is determined as first environment data. As described below, this information can be used, on the one hand, for the visualization of the driver of the second vehicle. On the other hand, for example, information obtained via a traffic sign from a preceding vehicle can be used to adapt the driving strategy of a driver assistance system.
Zweckmäßigerweise werden die ersten Umfelddaten zur Adaption einer Fahrfunktion des zweiten Fahrzeugs verarbeitet. Die Adaption der Fahrfunktion kann beispielsweise einen Eingriff in ein teil- oder hochautomatisiertes Fahrerassistenzsystem oder eines vollautomatisierten Fahrersystems umfassen. Solche Eingriffe umfassen beispielsweise einen Beschleunigungs- oder Ausrollvorgang, einen Bremsvorgang und dergleichen.Appropriately, the first environment data for adapting a driving function of the second vehicle are processed. The adaptation of the driving function may include, for example, an intervention in a partially or highly automated driver assistance system or a fully automated driver system. Such interventions include, for example, an acceleration or coasting operation, a braking operation, and the like.
Es ist weiterhin zweckmäßig, wenn die ersten Umfelddaten auf einer Anzeigeeinheit des zweiten Fahrzeugs oder einem in dem zweiten Fahrzeug mitgeführten mobilen Endgerät als Bilddaten ausgegeben werden. Beispielsweise können die ersten Umfelddaten in eine Kartendarstellung integriert werden. Alternativ können die ersten Umfelddaten dazu genutzt werden, eine sog. Top-View-Darstellung des Umfelds des zweiten Fahrzeugs mit den Objektdaten anderer Verkehrsteilnehmer und/oder Hindernissen anzureichern.It is furthermore expedient for the first environment data to be output as image data on a display unit of the second vehicle or on a mobile terminal entrained in the second vehicle. For example, the first environment data can be integrated into a map display. Alternatively, the first environment data can be used to enrich a so-called top-view representation of the environment of the second vehicle with the object data of other road users and / or obstacles.
Dazu können gemäß einer Ausgestaltung durch eine Umfeldsensorik des zweiten Fahrzeugs zweite Umfelddaten gewonnen werden, die Objektdaten anderer Verkehrsteilnehmer und/oder Hindernisse im Umfeld des zweiten Fahrzeugs umfassen, wobei die ersten und die zweiten Umfelddaten zusammen auf der Anzeigeeinheit des zweiten Fahrzeugs oder einem in dem zweiten Fahrzeug mitgeführten mobilen Endgerät als die Bilddaten ausgegeben werden. Gemäß dieser Ausgestaltung ist vorgesehen, zur Unterstützung des Fahrers bei seinen Fahrentscheidungen und seiner Orientierung im Verkehrsfluss nicht nur die ersten Umfelddaten des ersten Fahrzeugs, sondern auch oder nur die von seinem, zweiten Fahrzeug erfassten Umfelddaten zu visualisieren und miteinander zu kombinieren. Gemäß einer weiteren zweckmäßigen Ausgestaltung werden die aus den zweiten Umfelddaten ermittelten Bilddaten mit den aus den ersten Umfelddaten ermittelten Bilddaten erweitert, wobei die Erweiterung eine Ergänzung der in den zweiten Umfelddaten enthaltenen Objekte und Hindernisse um die in dem ersten Umfelddaten enthaltenen Objekte und Hindernisse in einer Karte oder einer perspektivischen Darstellung der Umgebung des zweiten Fahrzeugs umfasst.For this purpose, according to an embodiment, environmental data can be obtained from surrounding environment sensors of the second vehicle, which include object data of other road users and / or obstacles in the environment of the second vehicle, wherein the first and the second environment data together on the display unit of the second vehicle or one in the second Vehicle entrained mobile terminal are output as the image data. According to this refinement, not only the first environment data of the first vehicle, but also or only the environment data captured by its second vehicle is to be combined with the driver in his driving decisions and his orientation in the traffic flow. According to a further expedient embodiment, the image data determined from the second environment data are extended with the image data determined from the first environment data, wherein the extension is a supplement to the objects and obstacles contained in the second environment data around the objects and obstacles in a map contained in the first environment data or a perspective view of the surroundings of the second vehicle.
Die Kombination, kann, wie bereits beschrieben, durch das Hinzufügen von Objektdaten der ersten und zweiten Umfelddaten zu einer Kartendarstellung, zu einer dreidimensionalen Ansicht oder zu der bereits erwähnten Top-View-Darstellung erfolgen.The combination can, as already described, be done by adding object data of the first and second environment data to a map representation, to a three-dimensional view or to the already mentioned top view representation.
Verfügt das zweite Fahrzeug über keine Anzeigeeinheit, so können diese Informationen auch auf einem, in dem zweiten Fahrzeug mitgeführten mobilen Endgerät, z.B. einem Smartphone oder Tablet-PC, als die Bilddaten ausgegeben werden. Dadurch lässt sich das Verfahren auch in solchen Fahrzeugen nutzen, welche über keine geeignete Anzeigeeinheit zur visuellen Ausgabe der Bilddaten verfügen.If the second vehicle has no display unit, this information can also be stored on a mobile terminal carried in the second vehicle, e.g. a smartphone or tablet PC as the image data is output. As a result, the method can also be used in vehicles which do not have a suitable display unit for the visual output of the image data.
Eine weitere Ausgestaltung sieht vor, dass die ersten Umfelddaten von einer Fahrzeugkommunikationseinheit des ersten Fahrzeugs direkt durch eine zweite Fahrzeugkommunikationseinheit des zweiten Fahrzeugs über einen drahtlosen Kommunikationskanal empfangen werden. Als drahtlose Übertragungstechnologien kommen beispielsweise 801.xy oder ein beliebiges Mobilfunknetzwerk, z.B. GSM oder LTE, in Betracht. Eine direkte Übertragung der ersten Umfelddaten an das zweite Fahrzeug ist beispielsweise dann zweckmäßig, wenn das erste und das zweite Fahrzeug Systemkomponenten vom gleichen Hersteller, ggf. sogar mit gleicher Algorithmik, verwenden. In diesem Fall ist die Verarbeitung der ersten Umfelddaten durch das zweite Fahrzeug besonders einfach möglich. A further embodiment provides that the first environment data is received by a vehicle communication unit of the first vehicle directly through a second vehicle communication unit of the second vehicle via a wireless communication channel. As wireless transmission technologies, for example, 801.xy or any mobile network, such as GSM or LTE come into consideration. A direct transmission of the first environment data to the second vehicle is useful, for example, if the first and the second vehicle system components from the same manufacturer, possibly even with the same algorithm, use. In this case, the processing of the first environment data by the second vehicle is particularly easy.
Können die ersten Umfelddaten hingegen nicht direkt durch das zweite Fahrzeug verarbeitet werden, so kann der Empfang der ersten Umfelddaten des ersten Fahrzeugs durch das zweite Fahrzeug von einem zentralen Rechner oder einem Cloud-Service zweckmäßig sein, da hier durch den zentralen Rechner oder den Cloud-Service bereits eine Transformation in ein Datenformat formbar ist, welches durch das zweite Fahrzeug verarbeitbar ist.On the other hand, if the first environment data can not be processed directly by the second vehicle, then the reception of the first environment data of the first vehicle by the second vehicle from a central computer or a cloud service can be expedient since the central computer or the cloud computer Service is already a transformation into a data format formable, which is processable by the second vehicle.
Gemäß einem zweiten Aspekt schlägt die Erfindung eine Vorrichtung zur Ermittlung des Umfelds eines Fahrzeugs vor, die eine Fahrzeugkommunikationseinheit des Fahrzeugs und eine Recheneinheit des Fahrzeugs umfasst, wobei die Recheneinheit dazu ausgebildet ist, erste Umfelddaten, die mit einer Umfeldsensorik eines anderen Fahrzeugs gewonnen werden und die zumindest Objektdaten anderer Verkehrsteilnehmer und/oder Hindernisse im Umfeld des anderen Fahrzeugs umfassen, von dem anderen Fahrzeug zu empfangen und zu verarbeiten. Die erfindungsgemäße Vorrichtung weist die gleichen Vorteile auf, wie diese vorstehend in Verbindung mit dem erfindungsgemäßen Verfahren beschrieben wurden.According to a second aspect, the invention proposes a device for determining the environment of a vehicle, which comprises a vehicle communication unit of the vehicle and a computing unit of the vehicle, wherein the arithmetic unit is adapted to first environment data obtained with an environment sensor system of another vehicle and the at least object data of other road users and / or obstacles in the environment of the other vehicle include receiving and processing of the other vehicle. The device according to the invention has the same advantages as described above in connection with the method according to the invention.
Die ersten Umfelddaten können durch die Recheneinheit zur Adaption einer Fahrfunktion des Fahrzeugs verarbeitet werden. Insbesondere kann hiermit beim Vorhandensein entsprechender Fahrerassistenzsysteme eine Anpassung der Fahrstrategie eines teil- oder hochautonomen Fahrers angepasst werden.The first environment data can be processed by the arithmetic unit for adapting a driving function of the vehicle. In particular, an adaptation of the driving strategy of a partially or highly autonomous driver can hereby be adapted in the presence of corresponding driver assistance systems.
Gemäß einer weiteren Ausgestaltung umfasst die Vorrichtung zweckmäßigerweise eine Umfeldsensorik zur Gewinnung zweiter Umfelddaten des Fahrzeugs, die Objektdaten anderer Verkehrsteilnehmer und/oder Hindernisse in dem Umfeld des Fahrzeugs umfassen, wobei die ersten und zweiten Umfelddaten durch die Recheneinheit zusammen auf der Anzeigeeinheit des Fahrzeugs oder einem in dem Fahrzeug mitgeführten mobilen Endgerät als die Bilddaten ausgegeben werden.According to a further embodiment, the device expediently comprises an environment sensor system for obtaining second environment data of the vehicle, which includes object data of other road users and / or obstacles in the environment of the vehicle, wherein the first and second environment data are stored together by the computing unit on the display unit of the vehicle or an in the vehicle entrained mobile terminal are output as the image data.
Gemäß einer weiteren Ausgestaltung ist die Recheneinheit dazu ausgebildet, die aus den zweiten Umfelddaten ermittelten Bilddaten mit den aus den ersten Umfelddaten ermittelten Bilddaten zu erweitern, wobei die Erweiterung eine Ergänzung der in den zweiten Umfelddaten enthaltenen Objekte und Hindernisse um die in den ersten Umfelddaten enthaltenen Objekte und Hindernisse in einer Karte oder einer perspektivischen Darstellung der Umgebung des Fahrzeugs umfasst.According to a further embodiment, the arithmetic unit is designed to expand the image data determined from the second environment data with the image data determined from the first environment data, wherein the extension is a supplement to the objects and obstacles contained in the second environment data around the objects contained in the first environment data and obstacles in a map or a perspective view of the surroundings of the vehicle.
Die Erfindung wird nachfolgend näher anhand von Ausführungsbeispielen in der Zeichnung beschrieben. Es zeigen:The invention will be described in more detail below with reference to embodiments in the drawing. Show it:
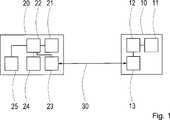
Die Umfeldsensoriken
Bei dem ersten Fahrzeug
Die in den jeweiligen Umfelddaten des ersten und des zweiten Fahrzeugs
Die Objektdaten können darüber hinaus alternativ oder zusätzlich auch Hindernisse im Umfeld des betreffenden Fahrzeugs
Das Umfeld des zweiten Fahrzeugs
Die Recheneinheit
Die Visualisierung von in den ersten Umfelddaten enthaltenen erkannten Objekten und/oder Hindernissen kann beispielsweise auf Wunsch des Fahrers des zweiten Fahrzeugs
Eine auf der Anzeigeeinheit
Die ersten Umfelddaten können beispielsweise auch in Gestalt sogenannter Objektlisten bereitgestellt werden. Eine solche Objektliste umfasst beispielsweise alle, durch die Umfeldsensorik
Im Ergebnis lässt sich durch das vorgeschlagene Verfahren das Sichtfeld für den Fahrer sowie die Recheneinheit
Es versteht sich, dass das zweite Fahrzeug
In Verbindung mit den
Die ausgetauschten Daten können grundsätzlich beliebiger Art sein. Es ist nicht zwingend notwendig, dass die Objektdaten andere Verkehrsteilnehmer sind. Beispielsweise ist auch der Austausch erkannter Verkehrszeichen entlang der befahrenen Strecke denkbar. Dies ist beispielsweise in
Der Austausch von Umfelddaten kann auch entgegen der Fahrtrichtung erfolgen. Zu einem Zeitpunkt t = x erkennt z.B. das erste Fahrzeug
BezugszeichenlisteLIST OF REFERENCE NUMBERS
- 1010
- erstes Fahrzeugfirst vehicle
- 1111
- Umfeldsensorikenvironment sensors
- 1212
- Recheneinheitcomputer unit
- 1313
- FahrzeugkommunikationseinheitVehicle communication unit
- 1414
- Anzeigeeinheitdisplay unit
- 1616
- erkanntes Objekt (Verkehrsteilnehmer)recognized object (road user)
- 2020
- zweites Fahrzeugsecond vehicle
- 21 21
- Umfeldsensorikenvironment sensors
- 2222
- Recheneinheitcomputer unit
- 2323
- FahrzeugkommunikationseinheitVehicle communication unit
- 2424
- Anzeigeeinheitdisplay unit
- 2525
- FahrerassistenzsystemDriver assistance system
- 2626
- erkanntes Objekt (Verkehrsteilnehmer)recognized object (road user)
- 3030
- Kommunikationsverbindungcommunication link
- 4040
- Fahrstreckedriving route
- 4141
- Fahrstreckedriving route
- 4242
- Fahrstreckedriving route
ZITATE ENTHALTEN IN DER BESCHREIBUNG QUOTES INCLUDE IN THE DESCRIPTION
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.This list of the documents listed by the applicant has been generated automatically and is included solely for the better information of the reader. The list is not part of the German patent or utility model application. The DPMA assumes no liability for any errors or omissions.
Zitierte PatentliteraturCited patent literature
- WO 2015/144145 A2[0003]WO 2015/144145 A2[0003]
Claims (15)
Translated fromGermanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016212688.1ADE102016212688A1 (en) | 2016-07-12 | 2016-07-12 | Method and device for determining the environment of a vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016212688.1ADE102016212688A1 (en) | 2016-07-12 | 2016-07-12 | Method and device for determining the environment of a vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| DE102016212688A1true DE102016212688A1 (en) | 2018-01-18 |
Family
ID=60782483
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102016212688.1AWithdrawnDE102016212688A1 (en) | 2016-07-12 | 2016-07-12 | Method and device for determining the environment of a vehicle |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102016212688A1 (en) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019001092A1 (en)* | 2019-02-14 | 2020-03-26 | Daimler Ag | Method for operating a driver assistance system, as well as electronic computing device, computer program product and data carrier |
| WO2020173772A1 (en)* | 2019-02-26 | 2020-09-03 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| WO2020173778A1 (en)* | 2019-02-26 | 2020-09-03 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| DE102019208498A1 (en)* | 2019-06-12 | 2020-12-17 | Robert Bosch Gmbh | Method for optimizing an environment model |
| DE102021202124A1 (en) | 2021-03-04 | 2022-09-08 | Volkswagen Aktiengesellschaft | Method for determining a roadway type of a roadway, computer program product and assistance system |
| DE102021125608A1 (en) | 2021-10-04 | 2023-04-06 | Bayerische Motoren Werke Aktiengesellschaft | Process and system for recognizing the surroundings of vehicles |
| US11762616B2 (en) | 2019-02-26 | 2023-09-19 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US11807260B2 (en) | 2019-02-26 | 2023-11-07 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| DE102022207197A1 (en) | 2022-07-14 | 2024-01-25 | Robert Bosch Gesellschaft mit beschränkter Haftung | Method for determining a roadway clearance and device |
| US12037006B2 (en) | 2019-02-26 | 2024-07-16 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12037005B2 (en) | 2019-02-26 | 2024-07-16 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12043275B2 (en) | 2019-02-26 | 2024-07-23 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12162506B2 (en) | 2019-02-26 | 2024-12-10 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12162505B2 (en) | 2019-02-26 | 2024-12-10 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12240322B2 (en) | 2019-02-26 | 2025-03-04 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008010119A1 (en)* | 2007-02-21 | 2008-11-20 | Denso Corp., Kariya-shi | Device for detecting an object and system for communication between vehicles |
| DE102009008745A1 (en)* | 2009-02-12 | 2010-08-19 | Volkswagen Ag | Method for automatic traffic routing of motor vehicle, involves transmitting traffic routing data from surrounding field model to corresponding road user for traffic routing by central control unit |
| DE102010006084A1 (en)* | 2009-02-03 | 2010-10-07 | GM Global Technology Operations, Inc., Detroit | Combined vehicle-to-vehicle communication and object detection detection |
| WO2015144145A2 (en) | 2014-03-25 | 2015-10-01 | Conti Temic Microelectronic Gmbh | Method and device for displaying objects on a vehicle display |
| DE102011115323B4 (en)* | 2010-10-13 | 2015-10-15 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Identification of a vehicle threat on a full windshield head-up display |
| DE202014006923U1 (en)* | 2014-08-27 | 2015-11-30 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Driver assistance system, computer program product and motor vehicle |
- 2016
- 2016-07-12DEDE102016212688.1Apatent/DE102016212688A1/ennot_activeWithdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008010119A1 (en)* | 2007-02-21 | 2008-11-20 | Denso Corp., Kariya-shi | Device for detecting an object and system for communication between vehicles |
| DE102010006084A1 (en)* | 2009-02-03 | 2010-10-07 | GM Global Technology Operations, Inc., Detroit | Combined vehicle-to-vehicle communication and object detection detection |
| DE102009008745A1 (en)* | 2009-02-12 | 2010-08-19 | Volkswagen Ag | Method for automatic traffic routing of motor vehicle, involves transmitting traffic routing data from surrounding field model to corresponding road user for traffic routing by central control unit |
| DE102011115323B4 (en)* | 2010-10-13 | 2015-10-15 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Identification of a vehicle threat on a full windshield head-up display |
| WO2015144145A2 (en) | 2014-03-25 | 2015-10-01 | Conti Temic Microelectronic Gmbh | Method and device for displaying objects on a vehicle display |
| DE202014006923U1 (en)* | 2014-08-27 | 2015-11-30 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Driver assistance system, computer program product and motor vehicle |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019001092A1 (en)* | 2019-02-14 | 2020-03-26 | Daimler Ag | Method for operating a driver assistance system, as well as electronic computing device, computer program product and data carrier |
| US12037006B2 (en) | 2019-02-26 | 2024-07-16 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12043275B2 (en) | 2019-02-26 | 2024-07-23 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12246745B2 (en) | 2019-02-26 | 2025-03-11 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| CN113439035A (en)* | 2019-02-26 | 2021-09-24 | 大众汽车股份公司 | Method for operating a driver information system in a self-propelled vehicle and driver information system |
| CN113692360A (en)* | 2019-02-26 | 2021-11-23 | 大众汽车股份公司 | Method for operating a driver information system in a self-propelled vehicle and driver information system |
| US11762616B2 (en) | 2019-02-26 | 2023-09-19 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12240322B2 (en) | 2019-02-26 | 2025-03-04 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12162505B2 (en) | 2019-02-26 | 2024-12-10 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| WO2020173778A1 (en)* | 2019-02-26 | 2020-09-03 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12162506B2 (en) | 2019-02-26 | 2024-12-10 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US11807260B2 (en) | 2019-02-26 | 2023-11-07 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| WO2020173772A1 (en)* | 2019-02-26 | 2020-09-03 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12037005B2 (en) | 2019-02-26 | 2024-07-16 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| CN114270141A (en)* | 2019-06-12 | 2022-04-01 | 罗伯特·博世有限公司 | Method for optimizing an environmental model |
| DE102019208498A1 (en)* | 2019-06-12 | 2020-12-17 | Robert Bosch Gmbh | Method for optimizing an environment model |
| DE102021202124A1 (en) | 2021-03-04 | 2022-09-08 | Volkswagen Aktiengesellschaft | Method for determining a roadway type of a roadway, computer program product and assistance system |
| DE102021125608A1 (en) | 2021-10-04 | 2023-04-06 | Bayerische Motoren Werke Aktiengesellschaft | Process and system for recognizing the surroundings of vehicles |
| DE102022207197A1 (en) | 2022-07-14 | 2024-01-25 | Robert Bosch Gesellschaft mit beschränkter Haftung | Method for determining a roadway clearance and device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102016212688A1 (en) | Method and device for determining the environment of a vehicle | |
| EP3830522B1 (en) | Method for estimating the quality of localisation in the self-localisation of a vehicle, device for carrying out the method, vehicle, and computer program | |
| EP3213260B1 (en) | Method and device for localizing a vehicle in the environment thereof | |
| DE102017217297B4 (en) | System for generating and / or updating a digital model of a digital map | |
| DE102012200950B3 (en) | Method and device for detecting a special situation in traffic | |
| DE102017203838A1 (en) | Method and system for environment detection | |
| DE102016210254A9 (en) | VEHICLE VENTILATION AT CROSSINGS ON THE BASIS OF VISUAL VENTILATION POINTS, STATIONARY OBJECTS AND BY GPS | |
| DE102018119882A1 (en) | Transmitting image data captured by a vehicle camera | |
| WO2015000882A1 (en) | Assistance system and assistance method for support when controlling a motor vehicle | |
| WO2017054956A1 (en) | Method and system for determining road users with potential for interaction | |
| DE102009008745A1 (en) | Method for automatic traffic routing of motor vehicle, involves transmitting traffic routing data from surrounding field model to corresponding road user for traffic routing by central control unit | |
| DE102008041679A1 (en) | Method for environment recognition for navigation system in car, involves storing data of object or feature in storage, and classifying object or feature by comparison of data after visual inspection of object or feature | |
| EP3151213B1 (en) | Vehicular apparatus and method of recording an area in the vicinity of a motor vehicle | |
| DE102021202955B4 (en) | Procedure for averting danger within a traffic network system | |
| DE102014205511A1 (en) | METHOD AND DEVICE FOR DISPLAYING OBJECTS ON A VEHICLE INDICATOR | |
| DE102013201796A1 (en) | Method for providing a driving corridor for a vehicle and driver assistance system | |
| DE102017215316A1 (en) | A method of assisting a user in operating a motor vehicle in trailer operation, driver assistance device, and motor vehicle | |
| DE102017201538A1 (en) | A method of processing data about an object located in an environment of a first vehicle | |
| DE112014005007T5 (en) | Information Notification Device, Information Notification System, Information Notification Method and Information Notification Program | |
| EP4046403B1 (en) | Method for providing an object message about an object detected in the environment of a road user in a communication network for communication with other road users | |
| DE102017006835A1 (en) | Control system, method and motor vehicle for calculating a motor vehicle trajectory | |
| DE102017209370B4 (en) | Method for determining overtaking information | |
| DE102019001092A1 (en) | Method for operating a driver assistance system, as well as electronic computing device, computer program product and data carrier | |
| DE102017129713A1 (en) | Method for reducing the risk due to limited visibility in traffic | |
| DE102015203192A1 (en) | traffic control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R163 | Identified publications notified | ||
| R005 | Application deemed withdrawn due to failure to request examination |