DE102015211344B4 - Device for handling articles and methods for detecting wear in such a handling device - Google Patents
Device for handling articles and methods for detecting wear in such a handling deviceDownload PDFInfo
- Publication number
- DE102015211344B4 DE102015211344B4DE102015211344.2ADE102015211344ADE102015211344B4DE 102015211344 B4DE102015211344 B4DE 102015211344B4DE 102015211344 ADE102015211344 ADE 102015211344ADE 102015211344 B4DE102015211344 B4DE 102015211344B4
- Authority
- DE
- Germany
- Prior art keywords
- actuating arms
- strain
- compression
- arms
- actuating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription31
- 230000006835compressionEffects0.000claimsabstractdescription38
- 238000007906compressionMethods0.000claimsabstractdescription38
- 230000033001locomotionEffects0.000claimsabstractdescription37
- 239000000725suspensionSubstances0.000claimsabstractdescription21
- 230000009347mechanical transmissionEffects0.000claimsabstractdescription6
- 238000012806monitoring deviceMethods0.000claimsabstractdescription3
- 238000011156evaluationMethods0.000claimsdescription14
- 230000001419dependent effectEffects0.000claimsdescription8
- 238000004458analytical methodMethods0.000claimsdescription7
- 230000005540biological transmissionEffects0.000description30
- 230000008878couplingEffects0.000description17
- 238000010168coupling processMethods0.000description17
- 238000005859coupling reactionMethods0.000description17
- 210000000245forearmAnatomy0.000description11
- 238000012544monitoring processMethods0.000description7
- 230000008859changeEffects0.000description6
- 238000012423maintenanceMethods0.000description6
- 238000005259measurementMethods0.000description6
- 238000004806packaging method and processMethods0.000description6
- 238000001514detection methodMethods0.000description5
- 230000009471actionEffects0.000description4
- 239000004820Pressure-sensitive adhesiveSubstances0.000description2
- 235000013361beverageNutrition0.000description2
- 238000006243chemical reactionMethods0.000description2
- 238000010276constructionMethods0.000description2
- 238000011161developmentMethods0.000description2
- 230000018109developmental processEffects0.000description2
- 238000004519manufacturing processMethods0.000description2
- 230000003449preventive effectEffects0.000description2
- 230000008569processEffects0.000description2
- 230000009467reductionEffects0.000description2
- 230000008439repair processEffects0.000description2
- 238000012360testing methodMethods0.000description2
- 239000010409thin filmSubstances0.000description2
- 229910000831SteelInorganic materials0.000description1
- 230000001133accelerationEffects0.000description1
- 239000004566building materialSubstances0.000description1
- 238000011109contaminationMethods0.000description1
- 238000010586diagramMethods0.000description1
- 238000006073displacement reactionMethods0.000description1
- 238000005516engineering processMethods0.000description1
- 230000007613environmental effectEffects0.000description1
- 239000000835fiberSubstances0.000description1
- 230000001788irregularEffects0.000description1
- 239000000463materialSubstances0.000description1
- 230000007246mechanismEffects0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 238000004393prognosisMethods0.000description1
- 239000010959steelSubstances0.000description1
Images


Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/003—Programme-controlled manipulators having parallel kinematics
- B25J9/0045—Programme-controlled manipulators having parallel kinematics with kinematics chains having a rotary joint at the base
- B25J9/0051—Programme-controlled manipulators having parallel kinematics with kinematics chains having a rotary joint at the base with kinematics chains of the type rotary-universal-universal or rotary-spherical-spherical, e.g. Delta type manipulators
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
Abstract
Translated fromGermanDescription
Translated fromGermanDie vorliegende Erfindung betrifft ein Verfahren zur Erkennung und Analyse des Verschleißgrades von elektromotorischen Antriebseinheiten einer Handhabungsvorrichtung zum Erfassen, Handhaben, Positionieren und/oder Manipulieren von Artikeln, Gruppierungen, Gebinden oder Stückgütern mit den Merkmalen des unabhängigen Verfahrensanspruchs 1. Die Erfindung betrifft zudem eine Vorrichtung zur Handhabung und/oder zum Manipulieren von Artikeln, Gruppierungen, Gebinden, Stückgütern mit den Merkmalen des unabhängigen Anspruchs 6.The present invention relates to a method for detecting and analyzing the degree of wear of electromotive drive units of a handling device for detecting, handling, positioning and / or manipulating articles, groupings, containers or piece goods with the features of the independent method claim 1. The invention also relates to a device for Handling and / or manipulating articles, groupings, containers, general cargo with the features of independent claim 6.
Bekannte Verpackungs- oder Palettieranlagen zum Stapeln und Palettieren von Objekten wie Paketen oder Gebinden mit mehreren Artikeln wie bspw. Getränkebehältern weisen üblicherweise Horizontalfördereinrichtungen mit Förderbändern auf, auf denen die Stückgüter oder Gebinde in ununterbrochener oder unregelmäßiger Folge zu einer Handhabungseinrichtung befördert werden. Dort erfolgt eine Verschiebung, Ausrichtung und/oder Drehen einzelner Stückgüter oder Gebinde, um diese in eine geeignete räumliche Anordnung zu bringen, die eine Basis bildet, um die Stückgüter oder Gebinde in nachgeordneten Gruppierstationen zu stapelfähigen Stückgut- oder Gebindelagen zusammenzuschieben.Known packaging or palletizing systems for stacking and palletizing objects such as packages or containers with several articles such as beverage containers usually have horizontal conveyors with conveyor belts on which the piece goods or packages are transported in uninterrupted or irregular sequence to a handling device. There is a shift, alignment and / or turning individual piece goods or containers to bring them into a suitable spatial arrangement, which forms a basis to push together the piece goods or containers in subordinate Gruppierstationen stackable piece goods or bundle layers.
In aktuellen Abfüll- und Verpackungslinien werden unterschiedliche Verfahren zum Drehen von Gebinden eingesetzt, die bspw. geeignete bewegliche Anschläge oder zwei Bänder mit unterschiedlichen Geschwindigkeiten aufweisen können. Bekannte Handhabungseinrichtungen können auch mit Greifern versehen sein, die an einem Portalsystem aufgehängt und in einem definierten Bewegungsbereich verschoben, rotiert und zudem in vertikaler Richtung bewegt werden können, um einzelne Stückgüter oder Gebinde zum Drehen und/oder Verschieben anheben zu können. Die Greifer können wahlweise auch an Armen von Mehrachsrobotern angeordnet sein, die jeweils seitlich an den Horizontalfördereinrichtungen platziert sind.In current filling and packaging lines, different methods are used for turning containers which, for example, can have suitable movable stops or two belts at different speeds. Known handling devices can also be provided with grippers which can be hung on a gantry system and moved in a defined range of motion, rotated and also can be moved in the vertical direction to lift individual piece goods or containers for turning and / or moving can. The grippers can optionally also be arranged on arms of multi-axis robots, which are each placed laterally on the horizontal conveyors.
Bei einer solchen Handhabung von Stückgütern oder Gebinden werden diese in der Praxis zum Zwecke eines Versetzens und/oder ihrer Ausrichtung erfasst, angehoben und in eine gewünschte Position bzw. Orientierung innerhalb einer Gruppierung überführt. Hierzu sind aus dem Stand der Technik bereits zahlreiche Greifvorrichtungen bekannt, so bspw. aus der
Eine weitere Greifvorrichtung zeigt bspw. die
Darüber hinaus gibt es weitere Handhabungseinrichtungen zum Greifen, Verschieben, Drehen und/oder Versetzen von Artikeln oder Gebinden, die auf sog. Deltarobotern oder Parallelkinematik-Robotern basieren, welche in einer dreiarmigen Ausführung auch als Tripode bezeichnet werden. Jeder der Arme eines solchen Tripods oder Deltakinematik-Roboters besteht aus einem an der Basis um eine gestellfeste Schwenkachse verschwenkbar angeordneten Oberarm und einem mit dem Oberarm und dem Koppelelement gelenkig verbundenen Unterarm. Während der Oberarm mit einem Antriebsmotor versehen ist, ist der Unterarm passiv, frei von einem Antrieb zu dessen Verschwenkung gegenüber dem Oberarm oder dem Koppelelement ausgeführt. Einer oder mehrere der Unterarme können bspw. über Kugelgelenke mit den jeweils zugehörigen Oberarmen und dem Koppelelement verbunden sein. Ein solcher einzelner Unterarm ist frei schwenkbar und besitzt keine Eigenstabilität. Alle Oberarme eines Deltaroboters sind jeweils um vorzugsweise innerhalb einer gemeinsamen Ebene liegende Schwenkachsen verschwenkbar angetrieben gelagert. Drei mit dem Koppelelement und jeweils mit ihrem zugehörigen Oberarm verbundene Unterarme bilden in jeder Position ein Kraftdreieck, das sich nur bewegen lässt, wenn die drei Oberarme synchron die für sie berechnete Schwenkbewegungen um deren gestellfeste Schwenkachsen ausführen. Zwei oder mehr Schwenkachsen können parallel verlaufen; in der Regel weisen alle Schwenkachsen zwei Schnittpunkte mit anderen Schwenkachsen auf.In addition, there are other handling devices for gripping, moving, rotating and / or moving articles or containers, which are based on so-called delta robots or parallel kinematic robots, which are also referred to in a three-armed version as tripod. Each of the arms of such a tripod or delta-kinematics robot consists of an upper arm pivoted on the base about a frame-fixed pivot axis and a lower arm pivotally connected to the upper arm and the coupling element. While the upper arm is provided with a drive motor, the lower arm is passive, running freely from a drive to its pivoting relative to the upper arm or the coupling element. One or more of the lower arms can be connected, for example, via ball joints with the respectively associated upper arms and the coupling element. Such a single forearm is free to pivot and has no inherent stability. All upper arms of a delta robot are in each case mounted so as to be pivotable about preferably pivot axes lying within a common plane. Three connected to the coupling element and each with its associated upper arm forearms form a force triangle in each position, which can only be moved when the three upper arms synchronously perform the calculated for them pivoting movements about their fixed frame pivot axes. Two or more pivot axes can be parallel; As a rule, all pivot axes have two points of intersection with other pivot axes.
Wenigstens einer der Unterarme kann aus zwei auch als Elle und Speiche bezeichneten, ein Parallelogrammgestänge bildenden Gestängeelementen bestehen, um das Koppelelement in zumindest einer vorgegebenen Ausrichtung relativ zur Basis zu führen. Das Koppelelement dient dabei als Arbeitsplattform, die in der Praxis auch als Tool-Center-Point (TCP) bezeichnet wird. An diesem TCP kann ein Manipulator angeordnet sein, bspw. in Gestalt von gegeneinander zustellbaren Greifarmen o. dgl. Handhabungseinrichtung, so dass damit Artikel, Gebinde o. dgl. Stückgüter ergriffen und gedreht, verschoben oder von einer Auflagefläche angehoben werden können.At least one of the lower arms may consist of two linkage elements, also referred to as ellipses and spokes, forming a parallelogram linkage, for guiding the coupling element in at least one predetermined orientation relative to the base. The coupling element serves as a work platform, which is also referred to in practice as a tool center point (TCP). At this TCP, a manipulator may be arranged, for example. In the form of mutually deliverable gripping arms o. The like. Handling device, so that so that items, containers o. The like. Packaged goods and rotated, can be moved or lifted from a support surface.
Der an der Arbeitsplattform bzw. dem TCP angeordnete Manipulator kann wahlweise drehbar gelagert sein, um den Manipulator ausrichten oder eine gewünschte Drehung der Artikel oder Stückgüter ausführen zu können. Anstelle einer antreibbar drehbaren Lagerung des Manipulators am Koppelelement ist grundsätzlich auch denkbar, den Manipulator unverdrehbar am Koppelelement anzuordnen und das gesamte Koppelelement unter entsprechender Ausgleichbewegung der Arme vermittels der Teleskopwelle gegenüber der Basis zu verdrehen. Damit einhergehend ist jedoch der Nachteil eines nur eingeschränkten Drehwinkels des Koppelelements. Die Einschränkung ergibt sich durch das Erreichen von Endanschlägen der gelenkigen Verbindungen der Oberarme und/oder des Koppelelements mit den Unterarmen und/oder dem gegenseitigen Kontakt benachbarter Unterarme.The arranged on the working platform or the TCP manipulator can optionally be rotatably mounted to align the manipulator or perform a desired rotation of the article or piece goods can. Instead of a drivable rotatable mounting of the manipulator on the coupling element is basically also conceivable to arrange the manipulator non-rotatably on the coupling element and to rotate the entire coupling element with a corresponding compensating movement of the arms by means of the telescopic shaft relative to the base. However, this is associated with the disadvantage of only limited rotation angle of the coupling element. The restriction results from the achievement of end stops of the articulated connections of the upper arms and / or the coupling element with the forearms and / or the mutual contact of adjacent forearms.
Aus der
Die bekannten Parallelkinematik-Roboter bzw. sog. Tripoden können einen für den jeweiligen Roboter verfügbaren Arbeitsraum abdecken, der sich aus der Länge der Oberarme, dem Abstand der Befestigung der Oberarme zum Mittelpunkt einer gestellfesten Basis, der Länge der Unterarme, dem Abstand der Befestigung der Unterarme zum Mittelpunkt des sog. Tool-Center-Points am Werkzeugträger und dem maximalen Schwenkbereich der Oberarme ergibt. Dieser Arbeitsraum ist bezogen auf den Tool-Center-Point in z-Richtung ein Zylinder, an dessen unteren Rand sich ein Kugelsegment anschließt. Ferner wird der Arbeitsraum am oberen Rand gegebenenfalls noch eingeschränkt durch maximale Schwenkwinkel kardanischer Teleskop-Antriebswellen.The known parallel kinematics robots or so-called tripods can cover a work space available for the respective robot, which is composed of the length of the upper arms, the distance between the attachment of the upper arms to the center of a frame-fixed base, the length of the lower arms, the distance of the attachment Forearms to the center of the so-called. Tool Center Points on the tool carrier and the maximum pivoting range of the upper arms results. In terms of the tool center point, this working space is a cylinder in the z direction, at the lower edge of which a sphere segment adjoins. Furthermore, the working space at the upper edge is possibly still limited by maximum pivoting angle gimbal telescopic drive shafts.
Die Vorteile dieser Deltakinematik-Roboter bzw. Tripoden liegen in ihren geringen bewegten Massen, woraus eine hohe Dynamik aller Stellbewegungen resultiert. Allerdings werden zur Realisierung der schnellen Stellbewegungen hohe Antriebsdrehmomente bei den Antrieben der Oberarme benötigt. Diese hohen Drehmomente werden in aller Regel durch Koppelung elektrischer Antriebsmotoren mit speziellen Getrieben zur Verfügung gestellt, wobei diese Getriebe hohe Untersetzungen aufweisen müssen. Die Lebensdauer der Roboter wird maßgeblich von den Standzeiten und Lebensdauern der für drei Stellarme benötigten drei Getriebe mitbestimmt, die zum Antrieb der Oberarme erforderlich sind. Da die Belastungen für die Getriebe je nach Betriebsdauer des Roboters, der zu bewegenden Massen und der in der Praxis realisierten Stellgeschwindigkeiten stark unterschiedlich sein können, ist die maximale Betriebsdauer für einen störungsfreien und verschleißarmen Betrieb, bis zu der eine Wartung erforderlich oder ein Austausch der Getriebe sinnvoll ist, schwer abzuschätzen.The advantages of these delta-kinematics robots or tripods lie in their low moving masses, resulting in a high dynamics of all positioning movements. However, high drive torques are needed in the drives of the upper arms to realize the fast positioning movements. These high torques are usually provided by coupling electric drive motors with special gear, these transmissions must have high reductions. The lifespan of the robots is decisively influenced by the service lives and lifetimes of the three gearboxes required for three actuating arms, which are required to drive the upper arms. Since the loads on the gears can vary greatly depending on the operating time of the robot, the masses to be moved and the actual realized actuating speeds, the maximum operating time for trouble-free and low-wear operation, up to which maintenance is required or replacement of the gearbox makes sense, difficult to estimate.
Da ein unerwarteter Ausfall auch nur eines dieser Getriebe unweigerlich zu einem vorübergehenden Totalausfall des gesamten Deltakinematik-Roboters führen würde, besteht das vorrangige Ziel der vorliegenden Erfindung darin, solche Ausfälle möglichst zuverlässig zu vermeiden, indem eine Verschleißerkennung durch Beobachtung und Erfassung bestimmter Betriebsparameter während des regulären Betriebes des Roboters und daraus abgeleitet eine Ausfallsprognose bzw. ein Wartungs- und/oder Reparaturerfordernis diagnostiziert werden. Um dies zu erreichen, sollen eine verbesserte Konstruktion eines Deltakinematik-Roboters sowie ein verbessertes Verfahren für den Betrieb eines solchen Roboters sowie zur Überwachung der definierten Betriebsparameter zur Verfügung gestellt werden.Since an unexpected failure of even one of these transmissions would inevitably lead to a temporary total failure of the entire delta-kinematics robot, the primary object of the present invention is to avoid such failures as reliably as possible by a wear detection by observation and detection of certain operating parameters during the regular Operation of the robot and derived from a failure prognosis or a maintenance and / or repair requirement are diagnosed. To achieve this, an improved construction of a delta-kinematics robot as well as an improved method for the operation of such a robot as well as for monitoring the defined operating parameters are to be made available.
Dieses Ziel der Erfindung wird mit dem Gegenstand des unabhängigen Verfahrensanspruchs erreicht. Merkmale vorteilhafter Weiterbildungen der Erfindung finden sich in den davon abhängigen Ansprüchen. So schlägt die vorliegende Erfindung zur Erreichung des genannten Ziels ein Verfahren zur Erkennung und Analyse des Verschleißgrades von elektromotorischen Antriebseinheiten einer Handhabungsvorrichtung zum Erfassen, Handhaben, Positionieren und/oder Manipulieren von Artikeln, Gruppierungen, Gebinden, Stückgütern oder dergleichen vor. Die Handhabungsvorrichtung umfasst zumindest eine obere Aufhängung, an welcher wenigstens zwei elektromotorisch angetriebene Stellarme gelenkig befestigt sind, wobei die wenigstens zwei Stellarme jeweils aus wenigstens zwei relativ zueinander schwenkbaren Armabschnitten bestehen und unabhängig voneinander betätigt werden können. Sie umfasst weiterhin einen Manipulator, welcher ein oder mehrere Mittel zum Greifen der Artikel, Gruppierungen, Gebinde oder Stückgüter umfasst und mit den wenigstens zwei Stellarmen mechanisch gekoppelt ist, so dass durch eine Bewegung eines oder mehrerer der wenigstens zwei Stellarme eine Position des Manipulators vorgegeben werden kann. Zudem weist die Handhabungsvorrichtung wenigstens einen Dehnungs-, Stauchungs- und/oder Spannungssensor auf, der wenigstens einem der Stellarme, dem Manipulator und/oder einem den Manipulator tragenden und an den Stellarmen aufgehängten Werkzeugträger zugeordnet ist, und der dehnungs-, längenänderungs- und/oder spannungsinduzierte Ausgangssignale generiert, sowie eine Überwachungseinrichtung zur Erfassung von Antriebsmomenten und/oder Stromaufnahmewerten wenigstens eines der elektromotorischen Antriebe zumindest eines der an der oberen Aufhängung gelenkig befestigten Stellearme. Aus den Ausgangssignalen des wenigstens einen Dehnungs-, Stauchungs- und/oder Spannungssensors werden zu erwartende Antriebsmomentverläufe für den wenigstens einen elektromotorischen Antrieb errechnet, die permanent oder in definierbaren Zeitabständen mit den aus den Stromaufnahmewerten hergeleiteten tatsächlichen Antriebsmomenten verglichen werden. Darüber hinaus wird aus Abweichungen zwischen den Werten auf eine mechanische Übertragungsgüte und/oder auf einen Verschleißgrad des wenigstens einen überwachten elektromotorischen Antriebs des jeweiligen Stellarms geschlossen. Wahlweise können bei dem Verfahren die Ausgangssignale des wenigstens einen Dehnungs-, Stauchungs- und/oder Spannungssensors mit aus den Stromaufnahmewerten zumindest des ihm zugeordneten Stellarmantriebs errechneten, zu erwartenden Dehnungs-, Stauchungs- und/oder Spannungswerten verglichen werden, so dass aus den Abweichungen zwischen den gemessenen und den errechneten Werten auf eine mechanische Übertragungsgüte und/oder auf einen Verschleißgrad des wenigstens einen überwachten elektromotorischen Antriebs des jeweiligen Stellarms geschlossen werden kann.This object of the invention is achieved with the subject matter of the independent method claim. Features of advantageous developments of the invention can be found in the dependent claims. Thus, in order to achieve the stated object, the present invention proposes a method for detecting and analyzing the degree of wear of electromotive drive units of a handling device for detecting, handling, positioning and / or manipulating articles, groupings, containers, piece goods or the like. The handling device comprises at least one upper suspension, on which at least two electric motor-driven actuating arms are articulated, wherein the at least two actuating arms each consist of at least two arm portions pivotable relative to each other and can be operated independently. It further comprises a manipulator, which comprises one or more means for gripping the articles, groupings, packages or piece goods and is mechanically coupled to the at least two actuating arms, so that a position of the manipulator are predetermined by a movement of one or more of the at least two actuating arms can. In addition, the handling device has at least one expansion, compression and / or stress sensor, which is assigned to at least one of the actuating arms, the manipulator and / or a tool carrier carrying the manipulator and suspended on the actuating arms, and the strain, length and / or or voltage-induced output signals, as well as a monitoring device for detecting drive torques and / or current consumption values of at least one of the electromotive drives at least one of the at upper suspension articulated arms. From the output signals of the at least one strain, compression and / or voltage sensor expected torque profiles for the at least one electric motor drive are calculated, which are compared permanently or at definable time intervals with the derived from the current consumption values actual drive torque. In addition, it is concluded from deviations between the values of a mechanical transmission quality and / or a degree of wear of the at least one monitored electric motor drive of the respective actuator arm. Optionally, in the method, the output signals of the at least one strain, compression and / or voltage sensor can be compared with expected strain, compression and / or stress values calculated from the current consumption values of at least the actuator arm drive assigned to it, so that from the deviations between the measured and the calculated values can be concluded on a mechanical transmission quality and / or on a degree of wear of the at least one monitored electromotive drive of the respective actuator arm.
Dieses erfindungsgemäße Verfahren zur Beobachtung des Antriebs- und Reaktionsverhaltens der elektromotorisch über Getriebe beweglichen Stellarme ermöglicht es, den Zustand der Antriebe und insbesondere der Getriebe während der gesamten bestimmungsgemäßen Verwendung, d.h. ohne aufwendige und zeitraubende Testzyklen, zu überwachen und zu analysieren. Damit können auch Verschleißerscheinungen identifiziert werden, wodurch es ermöglicht ist, übermäßig beanspruchte Getriebeeinheiten z.B. im Rahmen einer turnusmäßigen Wartung rechtzeitig und ohne unvorhergesehenen Stillstand der gesamten Produktionsanlage zu tauschen. Diese Art eines Überwachungsverfahrens kann auch als „Condition Monitoring“ bezeichnet werden.This method according to the invention for monitoring the drive and reaction behavior of the actuating arms which are movable by means of a gear mechanism makes it possible to control the condition of the drives and, in particular, of the gears during the entire intended use, i. without complex and time-consuming test cycles to monitor and analyze. Thus wear phenomena can also be identified, thereby making it possible to repair over-stressed gear units, e.g. in the context of a regular maintenance on time and without unforeseen stoppage of the entire production plant to exchange. This type of monitoring method can also be called "condition monitoring".
Das Verfahren sieht vor, dass die Antriebsmomente und/oder die Stromaufnahmewerte des wenigstens einen elektromotorischen Antriebs, dessen an der oberen Aufhängung gelenkig befestigten Stellarm der Sensor zugeordnet ist, permanent während der Stellbewegungen des Stellarms erfasst und ausgewertet werden. Wahlweise können auch die Signale von zwei oder mehr Dehnungs-, Stauchungs- und/oder Spannungssensoren ausgewertet werden, die an zwei unterschiedlichen Stellarmen angeordnet sind.The method provides that the drive torques and / or the current consumption values of the at least one electromotive drive whose associated with the upper suspension pivotally mounted actuator arm of the sensor is permanently detected and evaluated during the control movements of the actuator arm. Alternatively, the signals of two or more strain, compression and / or voltage sensors can be evaluated, which are arranged on two different actuating arms.
Das Verfahren lässt sich besonders vorteilhaft bei Deltakinematik-Robotern anwenden, bei denen die beiden Armabschnitte jedes der vorhandenen Stellarme einen an der oberen Aufhängung gelenkig gelagerten, elektromotorisch angetriebenen Oberarm und einen an dessen der gelenkigen Aufhängung gegenüberliegendem Ende gelenkig angelenkten Unterarm umfassen, wobei an den unteren Enden der Unterarme der Manipulator aufgehängt ist. Bei diesen Deltakinematik-Robotern kann es sich insbesondere um sog. Tripode handeln, bei denen drei symmetrisch oder unsymmetrisch zueinander angeordnete Stellarme miteinander gekoppelt sind und durch jeweils unterschiedliche Stellbewegungen die gewünschten Bewegungen im Arbeitsraum ausführen können. Es kann sich bei den erfindungsgemäß mit Sensoren ausgestatteten Deltakinematik-Robotern jedoch auch um sog. Duopode handeln, bei denen nur zwei unabhängig voneinander bewegliche Stellarme vorgesehen sind, so dass der Bewegungsraum innerhalb einer vertikalen oder schrägen Ebene liegt. Die erfindungsgemäße Vorrichtung kann wahlweise auch mehr als drei Stellarme aufweisen.The method can be used particularly advantageously in delta-kinematics robots, in which the two arm sections of each of the existing actuating arms comprise an upper arm hinged electromotively driven upper arm and a hinged at its hinged end opposite articulated lower arm, wherein the lower Ends of the forearms of the manipulator is suspended. These delta kinematics robots may in particular be so-called tripods, in which three symmetrically or asymmetrically arranged actuating arms are coupled to one another and can perform the desired movements in the working space by respectively different actuating movements. However, the delta-kinematics robots equipped with sensors according to the invention may also be so-called duopods, in which only two independently movable actuating arms are provided so that the movement space lies within a vertical or oblique plane. Optionally, the device according to the invention can also have more than three actuating arms.
Zumindest einer der Oberarme, vorzugsweise alle Oberarme der Stellarme wird mit einem Dehnungs-, Stauchungs- und/oder Spannungssensor ausgestattet, wobei diese Sensoren zweckmäßigerweise an der Oberseite der Armstruktur und in etwa parallel zur radialen Wirkachse des Antriebsstranges positioniert werden. Als Sensoren lassen sich besonders vorteilhaft Dehnungsmessstreifen (DMS) einsetzen, die als dünne Foliensensoren bspw. mittels Haftklebern auf die Oberarme der Stellarme aufgebracht werden, um deren Verformungsverhalten in exakt reproduzierbare Ausgangssignale umzuwandeln. Als Dehnungsmessstreifen eignen sich bspw. solche Sensoren, die bei Dehnungen einen veränderlichen Widerstand bilden, der gemessen werden kann. Wahlweise können auch optisch arbeitende Dehnmessstreifen eingesetzt werden, die mit der Faser Bragg-Technologie arbeiten. Damit kann die dehnende bzw. stauchende Verformung des jeweiligen Oberarms erfasst und in Ausgangssignale umgewandelt werden. Diese Ausgangssignale des wenigstens einen Dehnungs-, Stauchungs- und/oder Spannungssensors bzw. des Dehnungsmessstreifens können mittels einer Auswerte- und/oder Rechnereinheit analysiert und/oder mit einem vorgebbaren Signalmuster verglichen werden. Ggf. kann auch ein überlagerter Kennfeldvergleich stattfinden, was aber aufgrund der unterschiedlichen Gewichte, die mit dem Roboter bewegt werden, zu unterschiedlichen Werten führen kann. Ein solcher Kennfeldvergleich ist daher nur bei gleichzeitigem Einsatz von Normgewichten und genormten Bewegungsabläufen sinnvoll.At least one of the upper arms, preferably all upper arms of the actuating arms is equipped with a strain, compression and / or voltage sensor, these sensors are conveniently positioned at the top of the arm structure and approximately parallel to the radial axis of action of the drive train. As sensors strain gauges (DMS) can be used particularly advantageous, which are applied as thin film sensors, for example. By means of pressure sensitive adhesives on the upper arms of the actuating arms to convert their deformation behavior into exactly reproducible output signals. As strain gauges are, for example, such sensors that form a variable resistance at strains that can be measured. Optionally, optically operating strain gauges can be used, which work with the fiber Bragg technology. Thus, the stretching or compressive deformation of the respective upper arm can be detected and converted into output signals. These output signals of the at least one strain, compression and / or stress sensor or the strain gauge can be analyzed by means of an evaluation and / or computer unit and / or compared with a predeterminable signal pattern. Possibly. can also take place a superimposed map comparison, but this can lead to different values due to the different weights that are moved with the robot. Such a map comparison is therefore useful only with simultaneous use of standard weights and standardized motion sequences.
Bei dem Verfahren werden die Signalanalyse und/oder der Vergleich mit dem vorgegebenen Signalmuster zur Verschleiß- und/oder Abnutzungserkennung und/oder deren Analyse des dem jeweiligen Stellarm zugeordneten elektromotorischen Antriebs und/oder eines diesem Antrieb zugeordneten Getriebe verwendet. Zu diesem Zweck werden alle Verformungen des mit einem Dehnmessstreifens ausgestatteten Stellarms bzw. Oberarms erfasst. Die Größe der jeweiligen Verformung ist ein Maß für die radial wirkende Kraft, die als Produkt mit dem Abstand des Hebelarms vom Achsmittelpunkt des Getriebes wirkt, bzw. ein Maß für das Drehmoment, das am Abtrieb des Getriebes aufgebracht werden muss. Bei einer Bewegung mit einem Greifwerkzeug, das eine bestimmte Nutzlast - diese kann bspw. durch ein Gebinde mit Behältern (in der Getränke- und Verpackungsmittelindustrie) gebildet sein - zu bewegen hat, ergibt sich daher für jede Verfahrkurve ein charakteristischer Drehmomentverlauf am Getriebeausgang. Gleichzeitig berechnet die Bewegungs- und Positionssteuerung des Roboters die für diese Aktion notwendigen Stromwerte und damit die notwendigen Antriebsmomente des Motors am Getriebeeingang. Bei einer Beschleunigung einer am Greifwerkzeug zu bewegenden Masse wird das erforderliche Motor-Antriebsdrehmoment aufgrund der Trägheiten des Antriebsstrangs (motoreigenes Trägheitsmoment des Läufers, Trägheitsmoment der Kupplung, Trägheitsmoment des Getriebes) und der Reibung im Getriebe immer zwangsläufig höher sein, als das am Getriebeausgang abgegebene Drehmoment. D.h. bei Vergleich der Kurvenverläufe der Drehmomente ergibt sich normalerweise immer ein zu erwartender Abstand, da das Motordrehmoment immer etwas größer ist als das am Getriebeausgang gelieferte Drehmoment. Dieses zuletzt genannte Drehmoment kann jedoch mittels der Dehnmessstreifen hergeleitet werden, während das Motormoment aus dessen Stromaufnahmeverläufen abgeleitet werden kann.In the method, the signal analysis and / or the comparison with the predetermined signal pattern for wear and / or wear detection and / or their analysis of the respective actuator arm associated electric motor drive and / or a transmission associated with this drive are used. For this purpose, all deformations of the with a strain gauge equipped Stellarms or upper arm detected. The size of the respective deformation is a measure of the radial force acting as a product with the distance of the lever arm from the axle center of the transmission, or a measure of the torque that must be applied to the output of the transmission. In a movement with a gripping tool, which has a certain payload - this can be formed, for example, by a container with containers (in the beverage and packaging industry) - therefore, results for each traversing a characteristic torque curve at the transmission output. At the same time, the motion and position control of the robot calculates the current values required for this action and thus the necessary drive torques of the motor at the transmission input. Upon acceleration of a mass to be moved on the gripper tool, the required engine drive torque due to the inertia of the drive train (engine inherent inertia of the rotor, moment of inertia of the clutch, moment of inertia of the transmission) and the friction in the transmission will always be necessarily higher than the torque output at the transmission output , That is, when comparing the curves of the torques, there is usually always an expected distance, since the engine torque is always slightly larger than the torque delivered at the transmission output. However, this latter torque can be derived by means of the strain gauges, while the engine torque can be derived from the current consumption curves.
Da die Trägheiten des Antriebsstranges eine weitgehend unveränderliche Konstante bilden, kann sich bei einer Veränderung des Differenzwertes zwischen Motordrehmoment und Getriebeabtriebsdrehmoment im Wesentlichen nur die Reibung im Getriebe und in den Lagern verändert haben, wenn eine Störungsfreiheit und annähernde Verschleißfreiheit des elektromotorischen Antriebs unterstellt wird. Sinnvollerweise erfolgt die Verschleißgradbestimmung bei einer Überschreitung vorgebbarer Grenzwerte zwischen den zu erwartenden Stromverbrauchssignalen (hergeleitet aus den Signalen des DMS oder der Mehrzahl von DMS) und den tatsächlichen Stromverbrauchssignalen.Since the inertia of the drive train form a largely invariable constant, with a change in the difference between engine torque and transmission output torque essentially only the friction in the transmission and in the bearings have changed, if a freedom from interference and approximate freedom from wear of the electric motor drive is assumed. It makes sense to determine the degree of wear by exceeding predefinable limit values between the expected power consumption signals (derived from the signals of the DMS or the majority of strain gauges) and the actual power consumption signals.
Das erfindungsgemäße Verfahren erfasst den Differenzbetrag der Momente vorzugsweise über die gesamte Betriebsdauer des Deltakinematik-Roboters. Dabei werden vorzugsweise die Motormomente eines charakteristischen Abschnittes einer immer wieder zyklisch durchlaufenen Bewegung mit den Werten der DMS-Messung am Oberarm verglichen. Aus der Veränderung der Messwerte kann nun auf eine Veränderung der Reibwerte im Antriebsstrang und damit auf den Zustand des Getriebes geschlossen werden. Ebenso denkbar ist es, dass bei einer Bewegung ohne Last (einem sogenannten Rückhub) Spannungsspitzen im ansonsten glatten Messverlauf auftreten, die ebenfalls auf eine erhöhte Reibung und damit auf einen Verschleiß im Getriebe hindeuten.The method according to the invention preferably detects the difference of the moments over the entire operating period of the delta kinematics robot. In this case, the engine torques of a characteristic section of a cyclically traversed motion are preferably compared with the values of the DMS measurement on the upper arm. From the change in the measured values can now be concluded on a change in the coefficients of friction in the drive train and thus the state of the transmission. It is also conceivable that in a movement without load (a so-called return stroke) spikes occur in the otherwise smooth measurement process, which also indicate increased friction and thus wear in the gearbox.
Weiterhin kann das Verfahren vorsehen, dass die Signalanalyse und/oder der Vergleich mit dem vorgegebenen Signalmuster zur Auslösung eines ereignisabhängigen Warnsignals und/oder eines ereignisabhängigen Maschinenstopps genutzt werden kann. Diese Variante ist insbesondere dann sinnvoll einzusetzen, wenn die Grenzwerte für einen störungsfreien Betrieb deutlich überschritten werden, so dass auf diese Weise noch eine kontrollierte Abschaltung erfolgen und ein unerwünschter Stopp im laufenden Betrieb vermieden werden kann.Furthermore, the method can provide that the signal analysis and / or the comparison with the predetermined signal pattern can be used to trigger an event-dependent warning signal and / or an event-dependent machine stop. This variant is particularly useful to use when the limits for trouble-free operation are significantly exceeded, so that still done in this way a controlled shutdown and an undesirable stop during operation can be avoided.
Das oben genannte Ziel der Erfindung wird weiterhin mit dem Gegenstand des unabhängigen Vorrichtungsanspruchs erreicht. Merkmale vorteilhafter Weiterbildungen der Erfindung finden sich in den davon abhängigen Ansprüchen. So schlägt die vorliegende Erfindung zur Erreichung des genannten Ziels eine Vorrichtung zur Handhabung und/oder zum Manipulieren von Artikeln, Gruppierungen, Gebinden, Stückgütern oder dergleichen vor, die eine obere Aufhängung umfasst, an welcher wenigstens zwei separat elektromotorisch angetriebene Stellarme gelenkig befestigt sind, wobei jeder der wenigstens zwei Stellarme durch wenigstens zwei relativ zueinander schwenkbare Armabschnitte gebildet ist, und wobei die wenigstens zwei Stellarme unabhängig voneinander betätigt werden können. Weiterhin umfasst die Vorrichtung einen Manipulator, welcher ein oder mehrere Mittel zum Greifen der Artikel, Gruppierungen, Gebinde oder Stückgüter umfasst und mit den wenigstens zwei Stellarmen mechanisch gekoppelt ist, so dass durch eine Bewegung eines oder mehrerer der wenigstens zwei Stellarme eine Position des Manipulators vorgegeben werden kann, sowie wenigstens einen Dehnungs-, Stauchungs- und/oder Spannungssensor, der wenigstens einem der Stellarme, dem Manipulator und/oder einem den Manipulator tragenden und an den Stellarmen aufgehängten Werkzeugträger zugeordnet ist, und der dehnungs-, längenänderungs- und/oder spannungsinduzierte Ausgangssignale generiert, und Mittel zur Erfassung von Antriebsmomenten und/oder Stromaufnahmewerten wenigstens eines der elektromotorischen Antriebe zumindest eines der an der oberen Aufhängung gelenkig befestigten Stellearme. Aus den Ausgangssignalen des wenigstens einen Dehnungs-, Stauchungs- und/oder Spannungssensors können aus den Stromaufnahmewerten zu erwartende Dehnungs-, Stauchungs- und/oder Spannungswerte generiert werden, die in einer Auswerte- und/oder Recheneinheit verarbeitet werden können. Aus Abweichungen zwischen den miteinander verglichenen Werten kann eine mechanische Übertragungsgüte und/oder ein Verschleißgrad des wenigstens einen überwachten elektromotorischen Antriebs des Stellarms hergeleitet werden. Da die Ausgangssignale des wenigstens einen Dehnungs-, Stauchungs- und/oder Spannungssensors hinsichtlich Abweichungen von einem vorgebbaren Handhabungs- und/oder Manipulierungsablauf und/oder hinsichtlich Veränderungen des Momentenverlaufs oder der auftretenden Widerstände auswertbar sind, kann aus dem Vergleich der Werte auf einen Verschleiß- oder Abnutzungsgrad der angetriebenen Komponenten, insbesondere des Getriebes geschlossen werden.The above-mentioned object of the invention is further achieved with the subject matter of the independent apparatus claim. Features of advantageous developments of the invention can be found in the dependent claims. Thus, in order to achieve the stated object, the present invention proposes a device for handling and / or manipulating articles, groupings, packs, piece goods or the like, which comprises an upper suspension on which at least two separately electromotively driven actuating arms are articulated, wherein each of the at least two actuating arms is formed by at least two relatively pivotable arm portions, and wherein the at least two actuating arms can be operated independently. Furthermore, the device comprises a manipulator which comprises one or more means for gripping the articles, groupings, packages or piece goods and is mechanically coupled to the at least two actuating arms, so that predetermined by a movement of one or more of the at least two actuating arms, a position of the manipulator can be, as well as at least one strain, compression and / or stress sensor, which is associated with at least one of the actuating arms, the manipulator and / or a manipulator-bearing and suspended on the actuator arms tool carrier, and the strain, längenänderungs- and / or generated voltage-induced output signals, and means for detecting drive torque and / or current consumption values of at least one of the electric motor drives at least one of the upper suspension hingedly attached actuating arms. From the output signals of the at least one strain, compression and / or voltage sensor, expected expansion, compression and / or stress values can be generated from the current consumption values, which can be processed in an evaluation and / or arithmetic unit. From deviations between the values compared with one another, a mechanical quality of transmission and / or a degree of wear of the at least a supervised electromotive drive of the actuator arm are derived. Since the output signals of the at least one strain, compression and / or stress sensor can be evaluated with regard to deviations from a predefinable handling and / or manipulation sequence and / or with regard to changes in the torque curve or the resistances that occur, it can be determined from the comparison of the values to a wear or degree of wear of the driven components, in particular the transmission are closed.
Die Vorrichtung weist vorzugsweise eine Auswerte- und/oder Rechnereinheit auf oder ist mit einer solchen gekoppelt, wobei die Auswerte- und/oder Rechnereinheit zur Analyse der Ausgangssignale des wenigstens einen Dehnungs-, Stauchungs- und/oder Spannungssensors und/oder zum Vergleich der Ausgangssignale mit einem vorgebbaren Signalmuster ausgestattet ist. Wahlweise können zwei oder mehr Dehnungs-, Stauchungs- und/oder Spannungssensoren vorgesehen sein, die an zwei oder mehreren unterschiedlichen Stellarmen angeordnet sind. Außerdem können wahlweise zwei oder mehr Dehnungs-, Stauchungs- und/oder Spannungssensoren vorgesehen sind, die an einem der Stellarme bzw. am Werkzeugträger angeordnet sind. Der wenigstens eine Dehnungs-, Stauchungs- und/oder Spannungssensor kann insbesondere durch einen ein elektrisches Ausgangssignal liefernden Dehnungsmessstreifen gebildet sein.The device preferably has an evaluation and / or computer unit or is coupled to such, wherein the evaluation and / or computer unit for analyzing the output signals of the at least one strain, compression and / or voltage sensor and / or to compare the output signals equipped with a predeterminable signal pattern. Optionally, two or more strain, compression and / or tension sensors may be provided, which are arranged on two or more different actuator arms. In addition, optionally two or more strain, compression and / or voltage sensors are provided, which are arranged on one of the actuating arms or on the tool carrier. The at least one strain, compression and / or stress sensor can be formed in particular by a strain gauge supplying an electrical output signal.
Als Vorteile der erfindungsgemäßen Vorrichtung sowie des oben in zahlreichen Details beschriebenen erfindungsgemäßen Verfahrens lässt sich die besonders preisgünstige Messmethode anführen, die mit sehr geringem Materialeinsatz sehr aussagekräftige Daten liefern kann. Die Messung der Antriebsmomente ist weitgehend unabhängig von variablen Umweltbedingungen wie z.B. der Reibung zwischen den Gebinden und einem Transporteur, die sich aufgrund von unterschiedlichen Verschmutzungsgraden ergeben können. Das mit dem Verfahren beschriebene sog. „Condition Monitoring“ des Antriebsstranges eines Deltakinematik-Roboters ermöglicht eine vorbeugende Überwachung und Wartung („Preventive Maintenance“) und verhindert auf diese Weise unerwünschte Anlagenstillstände.As advantages of the device according to the invention and of the method described above in numerous details according to the invention, the particularly inexpensive measuring method can be cited, which can provide very meaningful data with very little use of material. The measurement of drive torques is largely independent of variable environmental conditions such as e.g. the friction between the containers and a transporter, which may arise due to different degrees of contamination. The so-called "condition monitoring" of the drive train of a delta-kinematics robot described in the method enables preventive monitoring and maintenance ("preventive maintenance") and thus prevents undesired system downtimes.
Im Folgenden sollen Ausführungsbeispiele die Erfindung und ihre Vorteile anhand der beigefügten Figuren näher erläutern. Die Größenverhältnisse der einzelnen Elemente zueinander in den Figuren entsprechen nicht immer den realen Größenverhältnissen, da einige Formen vereinfacht und andere Formen zur besseren Veranschaulichung vergrößert im Verhältnis zu anderen Elementen dargestellt sind.
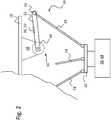
1 zeigt eine schematische Ansicht einer Ausführungsvariante einer erfindungsgemäßen Vorrichtung zur Handhabung und/oder zum Manipulieren von Artikeln, Gruppierungen, Gebinden oder Stückgütern.2 zeigt eine schematische Detailansicht einer ersten Ausführungsvariante der Vorrichtung gemäß1 .3 zeigt Drehmomentenverläufe eines Antriebsmotors für einen der Stellarme der Vorrichtung gemäß1 .
1 shows a schematic view of an embodiment of a device according to the invention for handling and / or manipulating articles, groups, containers or cargo.2 shows a schematic detail view of a first embodiment of the device according to1 ,3 shows torque curves of a drive motor for one of the actuating arms of the device according to1 ,
Für gleiche oder gleich wirkende Elemente der Erfindung werden identische Bezugszeichen verwendet. Ferner werden der Übersicht halber nur Bezugszeichen in den einzelnen Figuren dargestellt, die für die Beschreibung der jeweiligen Figur erforderlich sind. Die dargestellten Ausführungsformen stellen lediglich Beispiele dar, wie die erfindungsgemäße Vorrichtung sowie das erfindungsgemäße Verfahren ausgestaltet sein können und stellen keine abschließende Begrenzung dar.For identical or equivalent elements of the invention, identical reference numerals are used. Furthermore, for the sake of clarity, only reference symbols are shown in the individual figures, which are required for the description of the respective figure. The illustrated embodiments represent only examples of how the device according to the invention and the method according to the invention can be configured and do not constitute a final limitation.
Einleitend sei an dieser Stelle darauf hingewiesen, dass die in den
Die schematische Seitenansicht der
Die als Greif- und/oder Manipulationseinheit
Wie dies bereits im Detail in der
Die obere Aufhängung
Die Vorrichtung umfasst außerdem wenigstens einen Dehnungs-, Stauchungs- und/oder Spannungssensor
Der wenigstens eine Dehnungs-, Stauchungs- und/oder Spannungssensor
Die schematische Teilansicht der
Die Oberarme
Wie es die schematische Detailansicht der
Wie dies die Darstellung der
Wie es die
Bei dem Verfahren werden die Signalanalyse und/oder der Vergleich mit dem vorgegebenen Signalmuster zur Verschleiß- und/oder Abnutzungserkennung und/oder deren Analyse des dem jeweiligen Stellarm
Bei einer Beschleunigung einer am Greifwerkzeug
Somit ergibt sich beim Vergleich der Kurvenverläufe der Drehmomente (MMotor × i und MGetriebe) normalerweise immer ein zu erwartender Abstand (ΔM), da das Motordrehmoment immer etwas größer ist als das am Getriebeausgang gelieferte Drehmoment. Dieses zuletzt genannte Drehmoment kann jedoch mittels der Dehnmessstreifen
Das erfindungsgemäße Verfahren erfasst den Differenzbetrag der Momente vorzugsweise über die gesamte Betriebsdauer des Deltakinematik-Roboters. Dabei werden vorzugsweise die Motormomente eines charakteristischen Abschnittes einer immer wieder zyklisch durchlaufenen Bewegung mit den Werten der DMS-Messung am Oberarm verglichen. So zeigt die
Weiterhin kann das Verfahren vorsehen, dass die Signalanalyse und/oder der Vergleich mit dem vorgegebenen Signalmuster zur Auslösung eines ereignisabhängigen Warnsignals und/oder eines ereignisabhängigen Maschinenstopps genutzt werden kann. Diese Variante ist insbesondere dann sinnvoll einzusetzen, wenn die Grenzwerte für einen störungsfreien Betrieb deutlich überschritten werden, so dass auf diese Weise noch eine kontrollierte Abschaltung erfolgen und ein unerwünschter Stopp im laufenden Betrieb vermieden werden kann.Furthermore, the method can provide that the signal analysis and / or the comparison with the predetermined signal pattern can be used to trigger an event-dependent warning signal and / or an event-dependent machine stop. This variant is particularly useful to use when the limits for trouble-free operation are significantly exceeded, so that still done in this way a controlled shutdown and an undesirable stop during operation can be avoided.
Die Erfindung wurde unter Bezugnahme auf eine bevorzugte Ausführungsform beschrieben. Es ist jedoch für einen Fachmann vorstellbar, dass Abwandlungen oder Änderungen der Erfindung gemacht werden können, ohne dabei den Schutzbereich der nachstehenden Ansprüche zu verlassen.The invention has been described with reference to a preferred embodiment. However, it will be apparent to those skilled in the art that modifications or changes may be made to the invention without departing from the scope of the following claims.
BezugszeichenlisteLIST OF REFERENCE NUMBERS
- 1010
- Vorrichtung, Handhabungsvorrichtung, RoboterDevice, handling device, robot
- 1212
- Förderabschnitt, Horizontalförderabschnitt, HorizontalfördereinrichtungConveyor section, horizontal conveyor section, horizontal conveyor
- 1414
- Vorrichtung, Handhabungs-, Förder-, Gruppierungs-, VerpackungsvorrichtungDevice, handling, conveying, grouping, packaging device
- 1616
- Greifeinheit, Manipulationseinheit, ManipulatorGripping unit, manipulation unit, manipulator
- 1818
- obere Aufhängungupper suspension
- 2020
- Stellarmactuating arm
- 2222
- Oberarm, oberer ArmabschnittUpper arm, upper arm section
- 2424
- Unterarm, unterer ArmabschnittForearm, lower arm section
- 2626
- Koppelabschnitt, Tool-Center-Point (TCP), WerkzeugträgerCoupling section, Tool Center Point (TCP), tool carrier
- 2828
- Greifeinrichtung, ManipulatorGripping device, manipulator
- 3030
- Bewegungsraum, ArbeitsraumMovement room, work space
- 3232
- Stützträgersupport beam
- 3434
- Rahmengestell, RahmenFrame, frame
- 3636
- Dehnungs-, Stauchungs- und/oder SpannungssensorStrain, compression and / or tension sensor
- 3838
- Ausgangssignaloutput
- 4040
- Auswerte- und/oder RechnereinheitEvaluation and / or computer unit
- 4242
- Verbindungsstelle, Gelenk (zwischen Oberarmen und Unterarmen)Joint, joint (between upper arms and lower arms)
- 4444
- Greifbacken (der Greifeinrichtung), Greifwerkzeug, Mittel zum GreifenGripping jaws (the gripping device), gripping tool, means for gripping
- 4646
- oberer Aufhängungspunkt (der Oberarme)upper suspension point (upper arms)
- 4848
- Lagerbockbearing block
- 5050
- Getriebemotor, Antriebsmotor, elektromotorischer AntriebGear motor, drive motor, electric motor drive
- 5252
- Dehnungsmessstreifen, DMSStrain gage, strain gauge
Claims (10)
Translated fromGermanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015211344.2ADE102015211344B4 (en) | 2015-06-19 | 2015-06-19 | Device for handling articles and methods for detecting wear in such a handling device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015211344.2ADE102015211344B4 (en) | 2015-06-19 | 2015-06-19 | Device for handling articles and methods for detecting wear in such a handling device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| DE102015211344A1 DE102015211344A1 (en) | 2016-12-22 |
| DE102015211344B4true DE102015211344B4 (en) | 2019-06-27 |
Family
ID=57466552
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102015211344.2AActiveDE102015211344B4 (en) | 2015-06-19 | 2015-06-19 | Device for handling articles and methods for detecting wear in such a handling device |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102015211344B4 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020103856A1 (en) | 2020-02-14 | 2021-08-19 | Franka Emika Gmbh | Wear check when automatically optimizing robot processes |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017120367A1 (en) | 2017-09-05 | 2019-03-07 | Krones Aktiengesellschaft | Parallel kinematic robot and method for its operation |
| DE102019119352A1 (en)* | 2019-07-17 | 2021-01-21 | Krones Aktiengesellschaft | Predictive maintenance for a device in the food industry using a digital twin and optimized production planning |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3922524A1 (en)* | 1989-07-08 | 1991-01-17 | Kuka Schweissanlagen & Roboter | METHOD FOR CONTROLLING THE MOVEMENTS OF AN AXIS ON PROGRAM-CONTROLLED MACHINES AND CONTROL SYSTEM |
| JP2003153583A (en)* | 2001-11-12 | 2003-05-23 | Denso Corp | Monitor of dc servo motor and monitor system of robot |
| DE10204513A1 (en) | 2002-02-05 | 2003-08-21 | Probst Gmbh | Gripper device for gripping especially packs of building materials has first arm connected to vehicle and second arm guided on centre piece and movable relative to each other to open and close gripping device |
| US20070067678A1 (en)* | 2005-07-11 | 2007-03-22 | Martin Hosek | Intelligent condition-monitoring and fault diagnostic system for predictive maintenance |
| US20090255363A1 (en)* | 2008-04-10 | 2009-10-15 | Murata Machinery, Ltd. | Parallel mechanism |
| DE102010006155A1 (en) | 2009-01-29 | 2010-08-05 | Fanuc Ltd | parallel robot |
| EP2388216A1 (en) | 2010-05-18 | 2011-11-23 | Krones AG | Gripping device |
| US8210068B2 (en) | 2009-11-05 | 2012-07-03 | Hong Fu Jin Precision Industry (Shenzhen) Co., Ltd. | Rotation mechanism and robot using the same |
| US20140200596A1 (en)* | 2013-01-14 | 2014-07-17 | Intuitive Surgical Operations, Inc. | Torque compensation |
| DE102013001110A1 (en)* | 2013-01-22 | 2014-08-07 | Weber Maschinenbau Gmbh Breidenbach | Robot with a handling unit |
| DE102013208082A1 (en) | 2013-05-02 | 2014-11-06 | Krones Aktiengesellschaft | Device for handling articles |
| DE102013106004A1 (en) | 2013-06-10 | 2014-12-11 | Krones Aktiengesellschaft | Device for handling articles and method for operating such a device |
| DE102013111819A1 (en)* | 2013-10-25 | 2015-04-30 | Growth Finance Ag | Method for monitoring industrial systems |
- 2015
- 2015-06-19DEDE102015211344.2Apatent/DE102015211344B4/enactiveActive
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3922524A1 (en)* | 1989-07-08 | 1991-01-17 | Kuka Schweissanlagen & Roboter | METHOD FOR CONTROLLING THE MOVEMENTS OF AN AXIS ON PROGRAM-CONTROLLED MACHINES AND CONTROL SYSTEM |
| JP2003153583A (en)* | 2001-11-12 | 2003-05-23 | Denso Corp | Monitor of dc servo motor and monitor system of robot |
| DE10204513A1 (en) | 2002-02-05 | 2003-08-21 | Probst Gmbh | Gripper device for gripping especially packs of building materials has first arm connected to vehicle and second arm guided on centre piece and movable relative to each other to open and close gripping device |
| US20070067678A1 (en)* | 2005-07-11 | 2007-03-22 | Martin Hosek | Intelligent condition-monitoring and fault diagnostic system for predictive maintenance |
| US20090255363A1 (en)* | 2008-04-10 | 2009-10-15 | Murata Machinery, Ltd. | Parallel mechanism |
| DE102010006155A1 (en) | 2009-01-29 | 2010-08-05 | Fanuc Ltd | parallel robot |
| US8210068B2 (en) | 2009-11-05 | 2012-07-03 | Hong Fu Jin Precision Industry (Shenzhen) Co., Ltd. | Rotation mechanism and robot using the same |
| EP2388216A1 (en) | 2010-05-18 | 2011-11-23 | Krones AG | Gripping device |
| US20140200596A1 (en)* | 2013-01-14 | 2014-07-17 | Intuitive Surgical Operations, Inc. | Torque compensation |
| DE102013001110A1 (en)* | 2013-01-22 | 2014-08-07 | Weber Maschinenbau Gmbh Breidenbach | Robot with a handling unit |
| DE102013208082A1 (en) | 2013-05-02 | 2014-11-06 | Krones Aktiengesellschaft | Device for handling articles |
| DE102013106004A1 (en) | 2013-06-10 | 2014-12-11 | Krones Aktiengesellschaft | Device for handling articles and method for operating such a device |
| DE102013111819A1 (en)* | 2013-10-25 | 2015-04-30 | Growth Finance Ag | Method for monitoring industrial systems |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020103856A1 (en) | 2020-02-14 | 2021-08-19 | Franka Emika Gmbh | Wear check when automatically optimizing robot processes |
| DE102020103856B4 (en) | 2020-02-14 | 2022-06-15 | Franka Emika Gmbh | Wear check when automatically optimizing robot processes |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102015211344A1 (en) | 2016-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3020514B1 (en) | Handling device and method for handling items | |
| DE102012017328B4 (en) | Robot with a workpiece mass measurement function | |
| EP3419792A2 (en) | Robot joint and robot having at least one such robot joint | |
| EP3014237B1 (en) | Method for adjusting the zero point of a torque sensor relative to a manipulator | |
| DE102013106819A1 (en) | Method for robotic stacking of objects | |
| DE102014009122A1 (en) | ROBOTIC HAND TO PROMOTE AN OBJECT, ROBOT AND ROBOT SYSTEM WITH A ROBOTIC HAND, AND METHOD FOR CONTROLLING A ROBOTIC HAND | |
| EP3020513A1 (en) | Method for handling and/or for manipulating articles such as containers or piece goods | |
| DE102015220357A1 (en) | Parallel kinematic robot and method of operating such | |
| EP2813328A2 (en) | Device for handling items and a method for operating such a device | |
| DE102013204095A1 (en) | Method and device for positioning, aligning and / or grouping articles, piece goods or containers | |
| EP3641993A1 (en) | Gripper having a sensor on a transmission member bearing of the gripper | |
| DE102019115571B4 (en) | Fast removal of cut parts from a processing plant | |
| DE102015211344B4 (en) | Device for handling articles and methods for detecting wear in such a handling device | |
| DE102015220413A1 (en) | Parallel kinematic robot and method of handling same | |
| DE102013213057A1 (en) | Device for handling articles | |
| EP3078460A1 (en) | Method for controlling at least one manipulator using at least one force compensation device | |
| DE102014117787A1 (en) | Chain tester and chain test method for testing a coefficient of friction between a chain and a slide rail of a conveyor | |
| DE102021130823A1 (en) | BALANCING MECHANISM FOR ROBOT AUXILIARY DEVICE | |
| EP3221093B1 (en) | Device and method for handling and/or manipulating articles such as containers or piece goods | |
| EP3826812A1 (en) | Method and control system for calibrating a handling device | |
| DE102015211348A1 (en) | Handling device and method for handling articles | |
| DE102015120628A1 (en) | Arrangement and method for the coordinated control of at least two parallel kinematic robots | |
| DE2820848A1 (en) | LOADING DEVICE FOR LOADS | |
| DE102013213609A1 (en) | Device for handling articles | |
| EP3253540B1 (en) | Method for adjusting a torque sensor of a robot arm and robot comprising a robot arm and a control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R163 | Identified publications notified | ||
| R012 | Request for examination validly filed | ||
| R018 | Grant decision by examination section/examining division | ||
| R020 | Patent grant now final | ||
| R082 | Change of representative | Representative=s name:BENNINGER, JOHANNES, DIPL.-ING., DE |