DE102014007271A1 - Stepless bottom bracket gearbox for LEVs (Light electric vehicles) with integrated electric motor - Google Patents
Stepless bottom bracket gearbox for LEVs (Light electric vehicles) with integrated electric motorDownload PDFInfo
- Publication number
- DE102014007271A1 DE102014007271A1DE102014007271.1ADE102014007271ADE102014007271A1DE 102014007271 A1DE102014007271 A1DE 102014007271A1DE 102014007271 ADE102014007271 ADE 102014007271ADE 102014007271 A1DE102014007271 A1DE 102014007271A1
- Authority
- DE
- Germany
- Prior art keywords
- electric motor
- axially
- gear
- ring
- bottom bracket
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000005540biological transmissionEffects0.000claimsdescription51
- 230000008878couplingEffects0.000claimsdescription11
- 238000010168coupling processMethods0.000claimsdescription11
- 238000005859coupling reactionMethods0.000claimsdescription11
- 238000005096rolling processMethods0.000claimsdescription9
- 238000006073displacement reactionMethods0.000claimsdescription4
- 230000006835compressionEffects0.000claimsdescription3
- 238000007906compressionMethods0.000claimsdescription3
- 238000004519manufacturing processMethods0.000claimsdescription3
- 230000009467reductionEffects0.000abstractdescription3
- 238000011144upstream manufacturingMethods0.000abstract1
- 230000008859changeEffects0.000description10
- 230000002349favourable effectEffects0.000description5
- 238000012423maintenanceMethods0.000description5
- 230000005484gravityEffects0.000description3
- 230000008901benefitEffects0.000description2
- 238000010276constructionMethods0.000description2
- 238000000034methodMethods0.000description2
- 230000008569processEffects0.000description2
- 230000003134recirculating effectEffects0.000description2
- 239000000725suspensionSubstances0.000description2
- 230000001133accelerationEffects0.000description1
- 230000008450motivationEffects0.000description1
- 210000003205muscleAnatomy0.000description1
- 230000003647oxidationEffects0.000description1
- 238000007254oxidation reactionMethods0.000description1
- 230000002093peripheral effectEffects0.000description1
- 230000036316preloadEffects0.000description1
- 238000003860storageMethods0.000description1
Images






Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/55—Rider propelled cycles with auxiliary electric motor power-driven at crank shafts parts
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M11/00—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels
- B62M11/04—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio
- B62M11/12—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio with frictionally-engaging wheels
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- General Details Of Gearings (AREA)
Abstract
Translated fromGermanDescription
Translated fromGermanSogenannte LEV's, ein- oder mehrspurige Leichtfahrzeuge bis 250 kg Gewicht die über einen Elektroantrieb verfügen, hier am Beispiel von Fahrrädern mit Elektroantrieb (Pedelecs und E-Bikes) betrachtet, erfreuen sich stetig wachsender Beliebtheit. Sie bieten die Möglichkeit der individuellen, kostengünstigen, emissionsarmen und platzsparenden Fortbewegung im urbanen Raum und sind nach Meinung des Verfassers dieses Textes die zwingende Antwort auf die Frage wie wir als Menschen unsere Mobilität im Nahbereich zukünftig gestalten wollen. Die zunehmende weltweite Verstädterung mit wachsenden Bevölkerungsdichten in Ballungszentren ist dabei eine große Motivation zum Gebrauch von emissionsarmen und platzsparenden Fortbewegungsmitteln.So-called LEVs, single or multi-lane light vehicles with a weight of up to 250 kg, which are equipped with an electric drive and are considered here with the example of bicycles with electric drive (pedelecs and e-bikes), are enjoying ever-increasing popularity. They offer the possibility of individual, low-cost, low-emission and space-saving transportation in urban areas and in the opinion of the author of this text are the compelling answer to the question of how we as humans want to shape our mobility in the near future. Increasing global urbanization with population densities in metropolitan areas is a great motivation for the use of low-emission and space-saving means of transportation.
Daneben gibt es einen ständigen Trend zu mehr Komfort/Convenience der sich beim Fahrrad durch den Wunsch nach Wartungsfreiheit und beim Fahrrad mit Elektroantrieb durch den Wunsch nach automatisiertem Schalten äußert. Auch denken große Unternehmen wie die Deutsche Bahn darüber nach, ihren Kunden LEV's an Bahnhöfen zur Verfügung zu stellen, welche den Bahnkunden eine individuelle Fortbewegung in den Innenstädten erlaubt. Solche LEV's sollten wartungsfrei und einfach zu bedienen sein (z. B. durch automatisiertes Schalten).In addition, there is a constant trend towards more comfort / convenience that expresses itself in the bicycle by the desire for maintenance-free and the bicycle with electric drive by the desire for automated switching. Also, big companies like Deutsche Bahn are thinking about providing their customers with LEVs at train stations, which allow rail customers to travel in their inner city individually. Such LEVs should be maintenance-free and easy to use (eg by automated switching).
Der heutige Stand der Technik kennt eine Vielzahl an LEV-Varianten. Im Folgenden werden auf Grund der Übersichtlichkeit nur einspurige, zweirädrige auf dem klassischen Fahrrad aufbauende Konzepte näher betrachtet. Diese beinhalten i.d.R. ein mehrstufiges, formschlüssig arbeitendes Getriebe (Nabengetriebe mit einem oder mehreren Planetenradsätzen, Tretlagergetriebe mit mehreren Stirnradstufen oder die klassische Kettenschaltung mit mehreren Kettenblättern und Ritzeln) und einen Elektromotor, welcher i.d.R. als bürstenloser Gleichstrommotor (BLDC-Motor) ausgeführt ist. Dabei sitzt der Motor meist entweder in der Vorderradnabe, in der Nähe des Tretlagers oder in der Hinterradnabe. Radial kleine und damit leichte Motoren bedürfen i.d.R. eines ins Langsame übersetzenden, mindestens einstufigen Getriebes, (meist Planetenradsatz) um die Drehzahl-/Drehmoment-Kennlinie an die Erfordernisse eines Fahrrades anzupassen. Gängige am Markt befindliche Getriebemotoren für Fahrradanwendungen erreichen ein Gewichtsminimum von derzeit 2 kg bei einem Durchmesser von rund 120 mm. Auch auf dem Markt befindliche sog. Direct Drive Motoren, welche ohne Getriebe fahrradspezifische Drehmomente realisieren, bauen vom Durchmesser größer (> 200 mm) und sind in der Regel schwerer (Gewicht ca. 4 kg). Eine Kombination aus E-Motor (mit oder ohne eigenem Getriebe) und mehrstufigem Fahrradgetriebe ist derzeit nur von einem Hersteller realisiert. Dabei ist eine Dreigangnabenschaltung von Sram und ein BLDC-Motor von BionX in die Hinterradnabe eines Elektrofahrrades integriert. (Modell easy von Grace)The current state of the art knows a variety of LEV variants. In the following, due to the clarity, only one-lane, two-wheeled concepts based on the classic bicycle are considered in more detail. These include i.d.R. a multi-stage, positive working gearbox (hub gearbox with one or more planetary gear sets, bottom bracket gearbox with multiple spur gears or the classic derailleur with multiple chainrings and pinions) and an electric motor, which i.d.R. is designed as a brushless DC motor (BLDC motor). The engine usually sits either in the front hub, in the vicinity of the bottom bracket or in the rear hub. Radially small and thus light engines require i.d.R. a slow translating, at least single-stage gearbox, (usually planetary) to adapt the speed / torque curve to the needs of a bicycle. Common geared motors for bicycle applications on the market reach a weight minimum of currently 2 kg with a diameter of around 120 mm. Also available on the market so-called direct drive motors, which realize gear-specific torques without gears, build larger diameter (> 200 mm) and are usually heavier (weight about 4 kg). A combination of electric motor (with or without its own gearbox) and multistage bicycle gearbox is currently only realized by one manufacturer. A three-hub hub from Sram and a BLDC engine from BionX are integrated into the rear hub of an electric bicycle. (Model easy by Grace)
Die gemeinsamen Anforderungen an den E-Motor und das Getriebe bei einem Einsatz in einem LEV sind kostengünstiger Aufbau, geringes Gewicht, hoher Wirkungsgrad, Robustheit, Wartungsarmut bzw. Wartungsfreiheit. Der E-Motor sollte zudem ein fahrradspezifisches Drehmoment von bis zu 50 Nm am antreibenden Rad zur Verfügung stellen und das Getriebe sollte einen möglichst großen Stellbereich (kleinster bis größter Gang) aufweisen um in jeder Fahrsituation (am Berg und in der Ebene) dem Fahrer und E-Motor einen günstigen Drehzahl-/bzw. Trittfrequenzbereich zu gestatten.The common requirements for the electric motor and the gearbox when used in a LEV are low-cost construction, low weight, high efficiency, robustness, low maintenance and no maintenance. The electric motor should also provide a bike-specific torque of up to 50 Nm at the driving wheel and the transmission should have the largest possible range (smallest to largest gear) in each driving situation (on the mountain and in the plane) the driver and Electric motor a favorable speed / resp. Cadence range to allow.
Unter den oben aufgeführten gemeinsamen Anforderungen an Getriebe und E-Motor ist die nach einem hohen Wirkungsgrad eine der wichtigsten, da man mit einem hohen Wirkungsgrad des Antriebsstranges hohe Reichweiten des Elektroantriebes erzielt bzw. die Baugröße und damit die Kosten und das Gewicht des Akkus bei gleichbleibender Reichweite reduzieren kann. Zudem wird das Fahren ohne elektromotorische Unterstützung einfacher, da die Fahrwiderstände geringer sind.Among the above-mentioned common requirements for transmission and electric motor, the high efficiency is one of the most important, since with a high efficiency of the drive train high ranges of the electric drive achieved or the size and thus the cost and weight of the battery at the same Can reduce range. In addition, driving without electromotive assistance is easier because the driving resistance is lower.
Aus der Anforderung „Hoher Wirkungsgrad” ergibt sich eine günstige Anordnung von E-Motor und mehrstufigem Fahrradgetriebe derart, dass der E-Motor (mit oder ohne eigenem Getriebe) das Fahrradgetriebe mit nutzt, da der Drehzahlbereich des E-Motors, in welchem er die zugeführte elektrische Energie effizient in mechanische Energie umwandelt (Wirkungsgrad > 80%), relativ schmal ist. Hinzu kommt, dass auch der Mensch als Antriebsmaschine nur einen schmalen Drehzahl- bzw. Trittfrequenzbereich (Trittfrequenz zwischen 50–80 UpM) nutzt, in welchem die Muskeln effizient arbeiten bzw. sich ein komfortables Gefühl einstellt. Insofern kann es als günstig angesehen werden, den Drehzahlbereich des höchsten Motorwirkungsgrades auf den vom Menschen als komfortabel empfundenen Trittfrequenzbereich abzustimmen und das Fahrradgetriebe gemeinsam zu benutzen.From the requirement "high efficiency" results in a favorable arrangement of electric motor and multi-stage bicycle transmission such that the electric motor (with or without its own gearbox) uses the bicycle transmission, since the speed range of the electric motor, in which he supplied electrical energy efficiently converted into mechanical energy (efficiency> 80%), is relatively narrow. In addition, even the human being as a prime mover uses only a narrow speed or cadence range (cadence between 50-80 rpm), in which the muscles work efficiently or a comfortable feeling sets in. In this respect, it can be considered favorable to tune the speed range of the highest engine efficiency on the perceived by humans as comfortable cadence range and to use the bicycle transmission together.
Aus der Anordnung des E-Motors vor dem Fahrradgetriebe ergibt sich folgende Problemstellung. Die herkömmlichen Fahrradgetriebe (formschlüssig arbeitende Kettenschalt- und Hinterradnabengetriebe) sind i.d.R. nicht für den Betrieb mit einem E-Motor ausgelegt bzw. entwickelt. Der Betrieb mit einem E-Motor führt zu Schaltgeräuschen, einem Haken der Schaltung und erhöhtem Verschleiß, bzw. kann zur Beschädigung des Getriebes führen, wenn im Moment der Leistungsabgabe des E-Motors ein Gangwechsel durch den Fahrer vollzogen wird.From the arrangement of the electric motor in front of the bicycle transmission results in the following problem. The conventional bicycle transmissions (form-fitting chain shifting and rear-wheel transmissions) are i.d.R. not designed or developed for operation with an electric motor. Operation with an electric motor leads to switching noises, a hook of the circuit and increased wear, or can lead to damage to the transmission, if at the moment of the power output of the electric motor, a gear change is made by the driver.
Insofern kann es als günstig angesehen werden, ein stufenlos arbeitendes Getriebe einzusetzen, welches auf Grund der reibschlüssigen Kraftübertragung eine Teillastschaltfähigkeit aufweist (das heißt, der Kraftfluss muss bei Übersetzungsveränderung nicht unterbrochen werden) und damit auch unter Teillast keine Schaltgeräusche emittiert und keinen Schaltverschleiß aufweist. Geräusche und Verschleiß resultieren bei herkömmlichen, formschlüssig arbeitenden Zahnrad- oder Kettenradgetrieben aus der Anforderung der Unterbrechung des Kraftflusses während des Schaltvorgangs, was z. B. beim PKW durch die Kupplung geschieht. Beim Fahrrad wäre eine Kupplung zu aufwändig und teuer zu integrieren, daher nimmt man die Geräusche und den Verschleiß in Kauf. In this respect, it can be considered favorable to use a continuously variable transmission, which has a part load switching capability due to the frictional power transmission (that is, the power flow must not be interrupted at gear ratio change) and thus also under part load no switching noise emitted and has no switching wear. Noise and wear resulting in conventional, form-fitting gear or sprocket gears from the requirement of interrupting the power flow during the switching process, which z. B. happens in the car through the clutch. With the bike, a clutch would be too costly and expensive to integrate, so you take the noise and wear into account.
Der heutige Stand der Technik kennt diverse, in ihrem Übersetzungsverhältnis stufenlos variierbare Getriebe, welche kraftschlüssig bzw. reibschlüssig arbeiten, auch Regelreibradgetriebe genannt. Die Antriebsleistung wird durch Umfangskräfte übertragen, welche zwischen rotationssymmetrischen Reibkörpern unter einer Anpresskraft in den dabei radial zur Rotationsachse der Reibkörper angeordneten Berührflächen wirken. Die dabei unter der Anpresskraft entstehenden Abplattungen an den Reibkörperberührstellen lassen sich nach Hertz bzw. Stribeck berechnen und sind punkt-, ellipsen- oder linienförmig. Die realisierten Regelreibradgetriebebauformen haben gemeinsam, dass sie die stufenlose Veränderung der Übersetzung durch eine stufenlose Veränderung des wirksamen Radius der Berührflächen relativ zu den Reibkörperrotationsachsen verwirklichen. Die Reibkörper sind dabei im Wesentlichen kegel- bzw. kugelförmig. Die Veränderung des Radius wird bei Kugelreibgetrieben meist durch die Verkippung der Kugeldrehachse relativ zu einem An-/Abtriebskörper und bei Kegelreibgetrieben im Wesentlichen durch die Verlagerung der Reibfläche längs der Kegelmantellinie realisiert. Abhängig von der nutzbaren Reibzahl und der zu übertragenden Umfangskraft sind hohe Anpresskräfte notwendig, welche die Reibkörper belasten.The current state of the art knows various, in their gear ratio continuously variable transmission, which operate non-positively or frictionally, also called Regelreibradgetriebe. The drive power is transmitted by circumferential forces, which act between rotationally symmetrical friction bodies under a contact force in the radial direction of rotation of the friction body disposed contact surfaces. The resulting flattening at the Reibkörperberührstellen under the contact force can be calculated according to Hertz or Stribeck and are point, elliptical or linear. The realized Regelreibradgetriebebauformen have in common that they realize the stepless change in the ratio by a stepless change in the effective radius of the contact surfaces relative to the Reibkörperrotationsachsen. The friction bodies are essentially conical or spherical. The change in radius is realized in Kugelreibgetrieben mostly by the tilting of the ball rotation axis relative to a drive / driven body and Kegelreibgetrieben essentially by the displacement of the friction surface along the cone surface line. Depending on the usable friction coefficient and the circumferential force to be transmitted high contact forces are necessary, which burden the friction body.
Für Fahrräder gibt es seit kurzem eine stufenlose Getriebenabe der Firma Fallbrook aus USA. Sie nennt sich NuVinci N360 und arbeitet mit einer Reibgetriebestufe mit kugelförmigen Reibkörpern, deren Rotationsachse verkippt werden kann. Dadurch werden die wirksamen Radien der Reibkugeln auf der An- und Abtriebsseite verändert und damit eine stufenlose Übersetzungsveränderung realisiert. Durch die Einstufigkeit werden sehr große Drehmomentanforderungen an das Getriebe, welches sich in der Hinterradnabe befindet, gestellt (Antriebsrad beim Fahrrad bis zu 250 Nm). Dies erfordert sehr große Anpresskräfte in den die Umfangskraft übertragenden Reibflächen des Getriebes, da der Hebelarm zur Erzeugung eines Drehmomentes, auf Grund des aus Gewichtsgründen kleinen Durchmessers des Getriebes, ebenfalls klein ist. Dadurch entstehen hohe hertz'sche Pressungen in den Berührflächen der Reibkörper. Die von sogenannten Spreizkupplungen proportional zur Größe des anliegenden Drehmomentes erzeugten Anpresskräfte, welche mehrere zehntausend Newton betragen können, müssen ihrerseits über das Nabengehäuse abgestützt werden, welches entsprechend stabil und damit schwer gebaut sein muss. Ein weiterer Nachteil dieser Bauform ist das zu kleinen und großen Übersetzungsverhältnissen hin progressiv ansteigende Bohr-/Wälzverhältnis in den Reibflächen und damit ein überproportionales Ansteigen der Verlustleistung. Dadurch wird der Stellbereich, in welchem das Getriebe effizient arbeitet, also einen für Fahrradgetriebe ausreichend hohen (> 90%) Wirkungsgrad aufweist, eingeschränkt. Daneben müssen bei dieser Bauform die zwischen den Reibringen und den kugelförmigen Reibkörper wirkenden Anpresskräfte über wälzgelagerte Ringe abgestützt werden. Dies führt zum einen, auf Grund der ungünstigeren geometrischen Verhältnisse, zu höheren hertz'schen Pressungen in diesen Stützstellen als in den Reibstellen und auch hier zu Verschleiß und Verlusten und zum anderen zu Lagerverlusten in den Wälzlagern der Ringe.For bicycles there is recently a stepless gear hub of the company Fallbrook from USA. It is called NuVinci N360 and works with a friction gear stage with spherical friction bodies whose rotation axis can be tilted. As a result, the effective radii of the friction balls are changed on the input and output side and thus realized a stepless transmission change. Due to the single stage, very large torque requirements are placed on the gearbox, which is located in the rear hub (drive wheel on a bicycle up to 250 Nm). This requires very large contact forces in the circumferential force transmitting friction surfaces of the transmission, since the lever arm for generating a torque, due to the small diameter of the gearbox due to weight reasons, is also small. This results in high hertzian pressure in the contact surfaces of the friction body. The contact forces generated by so-called Spreizkupplungen proportional to the size of the applied torque, which can be several tens of thousands Newton, must in turn be supported by the hub shell, which must be correspondingly stable and therefore heavy. Another disadvantage of this design is the small and large gear ratios towards progressively increasing Bohr- / Wälzverhältnis in the friction surfaces and thus a disproportionate increase in power loss. As a result, the setting range in which the transmission operates efficiently, that is to say has a sufficiently high (> 90%) efficiency for bicycle transmissions, is restricted. In addition, in this design, the forces acting between the friction rings and the spherical friction body contact forces must be supported by roller bearings. On the one hand, due to the unfavorable geometrical conditions, this leads to higher hertzian pressures in these support points than in the friction points and also here to wear and losses and on the other to bearing losses in the rolling bearings of the rings.
Untersucht man unter Berücksichtigung der Nachteile des NuVinci N360 Getriebes die Möglichkeiten des Einsatzes anderer bekannter Regelreibgetriebebauformen, ist es sinnvoll zunächst nach dem Wirkungsgrad zu fragen, da dieser wie oben gezeigt eine wichtige Anforderung darstellt. Der Wirkungsgrad lässt sich grundsätzlich an einem sog. Bohr/Wälzverhältnis ablesen. Wobei kleine Bohr/Wälzverhältnisse grundsätzlich für eine hohe Effizienz bei der Reibkraftübertragung und somit in der Regel für einen hohen Wirkungsgrad stehen. Dieses Bohr/Wälzverhältnis verändert sich in der Regel mit der Übersetzung. Möchte man Wirkungsgrade von über 90% realisieren bei gleichzeitig großem Übersetzungsverhältnis kommen nur folgende Bauformen in Betracht: Kegel-Scheiben-Getriebe, Doppelkegel-Ring-Getriebe, Voll- und Halbtoroidgetriebe, Kegelringgetriebe sowie Schub- und Zuggliederbandgetriebe. Untersucht man diese Bauformen im Hinblick auf die Randbedingungen Gewicht, Bauvolumen und Leistungsvermögen für den Einsatz in einem Fahrrad nach obigen Annahmen, bleiben die Getriebebauformen Doppelkegel-Ring-Getriebe und Voll-/Halbtoroidgetriebe übrig. Da bei Voll- und Halbtoroidgetrieben die Lagerung der sog. Roller und deren Kippwinkeleinstellung für eine Übersetzungsveränderung mechanisch sehr aufwendig ist, fallen auch diese beiden Bauformen weg. Auf eine detaillierte Darstellung des Auswahlverfahrens wird hier verzichtet.If, taking into account the disadvantages of the NuVinci N360 transmission, the possibilities of using other known types of control gearboxes are examined, it makes sense first to ask about the efficiency, since this is an important requirement, as shown above. The efficiency can basically be read on a so-called Bohr / Wälzverhältnis. Wherein small Bohr / Wälzverhältnisse basically for a high efficiency in the frictional force transmission and thus usually for a high efficiency. This Bohr / Wälzverhältnis usually changes with the translation. If you want to realize efficiencies of more than 90% with a large transmission ratio, only the following types are considered: tapered-disc gearbox, double-cone ring gearbox, full and half toroidal gearbox, bevel ring gearbox as well as push and pull belt transmission. If one examines these designs with regard to the boundary conditions of weight, construction volume and performance for use in a bicycle according to the above assumptions, the transmission types double-cone-ring transmission and full / half-toroidal transmission remain. Since in full and half-toroidal gearboxes the storage of the so-called. Rollers and their tilt angle adjustment for a ratio change is mechanically very expensive, fall even these two types. A detailed description of the selection process is omitted here.
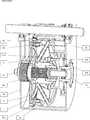
Das Doppelkegel-Ring-Regelreibgetriebe wurde von Jean Ernst Kopp in den 1950er Jahren entwickelt und verbindet einen einfachen Aufbau, eine einfache Übersetzungsveränderung – durch axiale Verlagerung des Doppelkegelträgers – mit einem günstigen Bohr-/Wälzverhältnis, welches auf Grund der Kegelform der Reibkörper bei Übersetzungsveränderung nur moderat variiert und damit einem guten Wirkungsgrad > 90%. Daneben müssen die Anpresskräfte auf An- und Abtriebsseite nicht über zusätzliche Lager abgetragen werden, da sie sich gegenseitig über die doppelkegelförmigen Reibkörper nahezu aufheben. Dies alles realisiert einen Verschleiß- und Wirkungsgradvorteil gegenüber dem NuVinci N360 Getriebe von Fallbrook.The double-cone-ring-Regelreibgetriebe was developed by Jean Ernst Kopp in the 1950s and combines a simple structure, a simple translation change - by axial displacement of the double cone carrier - with a favorable Bohr- / Wälzverhältnis, which varies only moderately due to the conical shape of the friction body with translation change and thus a good efficiency> 90%. In addition, the contact forces on the input and output side must not be removed via additional bearings, since they cancel each other almost over the double-conical friction body. All this provides a wear and efficiency advantage over the NuVinci N360 gearbox from Fallbrook.
Beschreibung der Funktionsweise:Description of how it works:
Die vom Fahrer über Tretkurbeln rotatorisch angetriebene Tretkurbelwelle (
Die Tretkurbelwelle (
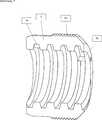
Der große Reibring (
Die in dem Steg (
Die Spreizkupplung (
Das Ritzel (
Der in den Patentansprüchen angegebenen Erfindung aus stufenlosem Getriebe mit integriertem E-Motor (
Gelöst wird dieses Problem auf Seiten des Getriebes durch die Verwendung eines Doppelkegel-Ring-Regelreibgetriebes (
Der in den Patentansprüchen angegebenen Erfindung aus stufenlosem Getriebe mit integriertem E-Motor (
Gelöst wird dieses Problem durch eine Anordnung des Fahrradgetriebes und des E-Motors in einer integrierten Lösung in der Nähe des Tretlagers. Durch die Integration der beiden Komponenten können Kosten und Gewicht gespart werden. Es wird zum Beispiel nur eine Gehäuse benötigt. Durch die Anordnung in der Nähe des Tretlagers werden die Massekräfte auf die Komponenten verringert, da sie sich in der Nähe des Drehzentrums des Fahrrades befinden, was die Robustheit erhöht, da Erschütterungen durch Fahrbahnunebenheiten im Drehzentrum des Fahrrades geringere Beschleunigungswerte bewirken als außerhalb des Drehzentrums auf Höhe der Radachsen. Die Nähe zur Batterie am vorderen Rahmenrohr ermöglicht zudem eine innenliegende Verkabelung, was die Fehleranfälligkeit durch lose Kontakte, Oxidation der Kontakte oder Beschädigung derselben reduziert und damit einen etwaigen Wartungsaufwand reduziert. Zudem ist die Schwerpunktslage für eine verbesserte Fahrdynamik optimiert (die Massen von Batterie und Fahrradgetriebe/E-Motor liegen in der Nähe des Fahrradschwerpunktes bzw. auf Höhe des Schwerpunktes des Fahrers) und im Falle einer Hinterradfederung sind die ungefederten Massen minimiert, was eine exzellente Hinterradfederung durch das Fehlen einer Nabenschaltung bzw. eines Ritzelpaketes und Umwerfers am Hinterrad erlaubt.This problem is solved by an arrangement of the bicycle transmission and the electric motor in an integrated solution near the bottom bracket. By integrating the two components, costs and weight can be saved. For example, only one housing is required. The arrangement near the bottom bracket reduces the mass forces on the components because they are near the center of rotation of the bicycle, which increases the robustness, since bumps caused by road bumps in the center of rotation of the bicycle cause lower acceleration values than outside the turning center in height the wheel axles. The proximity of the battery to the front frame tube also allows for internal wiring, reducing the susceptibility to loosening of loose contacts, oxidation of the contacts or damage to them, thus reducing any maintenance required. In addition, the center of gravity for improved driving dynamics is optimized (the masses of battery and bicycle / electric motor are close to the center of gravity or the center of gravity of the driver) and in the case of a rear suspension, the unsprung masses are minimized, resulting in excellent rear suspension allowed by the absence of a hub gear or a sprocket set and derailleur on the rear wheel.
Der in den Patentansprüchen angegebenen Erfindung aus stufenlosem Getriebe mit integriertem E-Motor (
Gelöst wird das Problem durch die Kombination eines Doppelkegel-Ring-Regelreibgetriebes (
Der in den Patentansprüchen angegebenen Erfindung aus stufenlosem Getriebe (
Gelöst wird dieses Problem durch die Erhöhung der Drehzahl am Getriebeeingang gegenüber der Trittfrequenz durch die Stirnradstufe (
Der in den Patentansprüchen angegebenen Erfindung liegt das Problem zu Grunde die Übersetzungsveränderung des Getriebes von außerhalb des Getriebes zu realisieren und dies mit einem geringen Drehmoment, welcher an einem Handdrehgriff am Lenker eines Fahrrades durch den Fahrer komfortabel erzeugt werden kann.The invention specified in the claims is based on the problem of realizing the ratio change of the transmission from outside the transmission and this with a low torque, which can be conveniently generated on a hand twist grip on the handlebar of a bicycle by the driver.
Gelöst wird dieses Problem durch die axiale Verstellung des Steges (
Der in den Patentansprüchen angegebenen Erfindung liegt das Problem zu Grunde die Fertigungs- und Montagetoleranzen bei der Positionierung des Steges (
Gelöst wird dieses Problem durch ein Feingewinde (FG) zwischen Trapezgewindemutter (
Der in den Patentansprüchen angegebenen Erfindung liegt das Problem zu Grunde, dass das Trapezgewinde bei kleiner Steigung in Selbsthemmung geht. Würde eine Verdrehung der Trapezgewindespindel (
Gelöst wird dieses Problem durch die Anordnung von zwei Zylinderstiften (
Claims (8)
Translated fromGermanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014007271.1ADE102014007271A1 (en) | 2013-06-15 | 2014-05-17 | Stepless bottom bracket gearbox for LEVs (Light electric vehicles) with integrated electric motor |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102013010130 | 2013-06-15 | ||
| DE102013010130.1 | 2013-06-15 | ||
| DE102014007271.1ADE102014007271A1 (en) | 2013-06-15 | 2014-05-17 | Stepless bottom bracket gearbox for LEVs (Light electric vehicles) with integrated electric motor |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| DE102014007271A1true DE102014007271A1 (en) | 2014-12-18 |
Family
ID=52009844
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102014007271.1AWithdrawnDE102014007271A1 (en) | 2013-06-15 | 2014-05-17 | Stepless bottom bracket gearbox for LEVs (Light electric vehicles) with integrated electric motor |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102014007271A1 (en) |
Cited By (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160040763A1 (en)* | 2013-04-19 | 2016-02-11 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| DE102016203661A1 (en) | 2016-03-07 | 2017-09-07 | Volkswagen Aktiengesellschaft | Pedelec drive arrangement |
| US9878717B2 (en) | 2008-08-05 | 2018-01-30 | Fallbrook Intellectual Property Company Llc | Systems and methods for control of transmission and/or prime mover |
| US9878719B2 (en) | 2007-02-01 | 2018-01-30 | Fallbrook Intellectual Property Company Llc | Systems and methods for control of transmission and/or prime mover |
| US9903450B2 (en) | 2008-08-26 | 2018-02-27 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US9920823B2 (en) | 2009-04-16 | 2018-03-20 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US9945456B2 (en) | 2007-06-11 | 2018-04-17 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US9950608B2 (en) | 2005-10-28 | 2018-04-24 | Fallbrook Intellectual Property Company Llc | Electromotive drives |
| DE102017200387A1 (en)* | 2017-01-11 | 2018-07-12 | Robert Bosch Gmbh | Heat dissipation of a drive for electric bicycles by air flow |
| US10036453B2 (en) | 2004-10-05 | 2018-07-31 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10047861B2 (en) | 2016-01-15 | 2018-08-14 | Fallbrook Intellectual Property Company Llc | Systems and methods for controlling rollback in continuously variable transmissions |
| US10056811B2 (en) | 2007-04-24 | 2018-08-21 | Fallbrook Intellectual Property Company Llc | Electric traction drives |
| US10066712B2 (en) | 2010-03-03 | 2018-09-04 | Fallbrook Intellectual Property Company Llc | Infinitely variable transmissions, continuously variable transmissions, methods, assemblies, subassemblies, and components therefor |
| US10066713B2 (en) | 2008-06-23 | 2018-09-04 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10094453B2 (en) | 2007-02-16 | 2018-10-09 | Fallbrook Intellectual Property Company Llc | Infinitely variable transmissions, continuously variable transmissions, methods, assemblies, subassemblies, and components therefor |
| US10100927B2 (en) | 2007-11-16 | 2018-10-16 | Fallbrook Intellectual Property Company Llc | Controller for variable transmission |
| EP3431380A1 (en) | 2017-07-19 | 2019-01-23 | Robert Bosch GmbH | Gear crank drive of a bicycle |
| US10197147B2 (en) | 2010-11-10 | 2019-02-05 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10253880B2 (en) | 2008-10-14 | 2019-04-09 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10260629B2 (en) | 2007-07-05 | 2019-04-16 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10260607B2 (en) | 2007-02-12 | 2019-04-16 | Fallbrook Intellectual Property Company Llc | Continuously variable transmissions and methods therefor |
| US10400872B2 (en) | 2015-03-31 | 2019-09-03 | Fallbrook Intellectual Property Company Llc | Balanced split sun assemblies with integrated differential mechanisms, and variators and drive trains including balanced split sun assemblies |
| US10428939B2 (en) | 2003-02-28 | 2019-10-01 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10428915B2 (en) | 2012-01-23 | 2019-10-01 | Fallbrook Intellectual Property Company Llc | Infinitely variable transmissions, continuously variable transmissions, methods, assemblies, subassemblies, and components therefor |
| US10458526B2 (en) | 2016-03-18 | 2019-10-29 | Fallbrook Intellectual Property Company Llc | Continuously variable transmissions, systems and methods |
| US10634224B2 (en) | 2008-06-06 | 2020-04-28 | Fallbrook Intellectual Property Company Llc | Infinitely variable transmissions, continuously variable transmissions, methods, assemblies, subassemblies, and components therefor |
| US10704687B2 (en) | 2007-12-21 | 2020-07-07 | Fallbrook Intellectual Property Company Llc | Automatic transmissions and methods therefor |
| US10711869B2 (en) | 2005-11-22 | 2020-07-14 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US11174922B2 (en) | 2019-02-26 | 2021-11-16 | Fallbrook Intellectual Property Company Llc | Reversible variable drives and systems and methods for control in forward and reverse directions |
| US11215268B2 (en) | 2018-11-06 | 2022-01-04 | Fallbrook Intellectual Property Company Llc | Continuously variable transmissions, synchronous shifting, twin countershafts and methods for control of same |
| US11454303B2 (en) | 2005-12-09 | 2022-09-27 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US11598397B2 (en) | 2005-12-30 | 2023-03-07 | Fallbrook Intellectual Property Company Llc | Continuously variable gear transmission |
| US11667351B2 (en) | 2016-05-11 | 2023-06-06 | Fallbrook Intellectual Property Company Llc | Systems and methods for automatic configuration and automatic calibration of continuously variable transmissions and bicycles having continuously variable transmission |
| US12442434B2 (en) | 2024-06-04 | 2025-10-14 | Enviolo B.V. | Reversible variable drives and systems and methods for control in forward and reverse directions |
- 2014
- 2014-05-17DEDE102014007271.1Apatent/DE102014007271A1/ennot_activeWithdrawn
Cited By (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10428939B2 (en) | 2003-02-28 | 2019-10-01 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10036453B2 (en) | 2004-10-05 | 2018-07-31 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US9950608B2 (en) | 2005-10-28 | 2018-04-24 | Fallbrook Intellectual Property Company Llc | Electromotive drives |
| US10711869B2 (en) | 2005-11-22 | 2020-07-14 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US11454303B2 (en) | 2005-12-09 | 2022-09-27 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US11598397B2 (en) | 2005-12-30 | 2023-03-07 | Fallbrook Intellectual Property Company Llc | Continuously variable gear transmission |
| US9878719B2 (en) | 2007-02-01 | 2018-01-30 | Fallbrook Intellectual Property Company Llc | Systems and methods for control of transmission and/or prime mover |
| US10703372B2 (en) | 2007-02-01 | 2020-07-07 | Fallbrook Intellectual Property Company Llc | Systems and methods for control of transmission and/or prime mover |
| US10260607B2 (en) | 2007-02-12 | 2019-04-16 | Fallbrook Intellectual Property Company Llc | Continuously variable transmissions and methods therefor |
| US10094453B2 (en) | 2007-02-16 | 2018-10-09 | Fallbrook Intellectual Property Company Llc | Infinitely variable transmissions, continuously variable transmissions, methods, assemblies, subassemblies, and components therefor |
| US10056811B2 (en) | 2007-04-24 | 2018-08-21 | Fallbrook Intellectual Property Company Llc | Electric traction drives |
| US9945456B2 (en) | 2007-06-11 | 2018-04-17 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10260629B2 (en) | 2007-07-05 | 2019-04-16 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US11125329B2 (en) | 2007-11-16 | 2021-09-21 | Fallbrook Intellectual Property Company Llc | Controller for variable transmission |
| US10100927B2 (en) | 2007-11-16 | 2018-10-16 | Fallbrook Intellectual Property Company Llc | Controller for variable transmission |
| US10704687B2 (en) | 2007-12-21 | 2020-07-07 | Fallbrook Intellectual Property Company Llc | Automatic transmissions and methods therefor |
| US10634224B2 (en) | 2008-06-06 | 2020-04-28 | Fallbrook Intellectual Property Company Llc | Infinitely variable transmissions, continuously variable transmissions, methods, assemblies, subassemblies, and components therefor |
| US10066713B2 (en) | 2008-06-23 | 2018-09-04 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US9878717B2 (en) | 2008-08-05 | 2018-01-30 | Fallbrook Intellectual Property Company Llc | Systems and methods for control of transmission and/or prime mover |
| US10704657B2 (en) | 2008-08-26 | 2020-07-07 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US9903450B2 (en) | 2008-08-26 | 2018-02-27 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10253880B2 (en) | 2008-10-14 | 2019-04-09 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US9920823B2 (en) | 2009-04-16 | 2018-03-20 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10746270B2 (en) | 2009-04-16 | 2020-08-18 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10066712B2 (en) | 2010-03-03 | 2018-09-04 | Fallbrook Intellectual Property Company Llc | Infinitely variable transmissions, continuously variable transmissions, methods, assemblies, subassemblies, and components therefor |
| US10197147B2 (en) | 2010-11-10 | 2019-02-05 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10428915B2 (en) | 2012-01-23 | 2019-10-01 | Fallbrook Intellectual Property Company Llc | Infinitely variable transmissions, continuously variable transmissions, methods, assemblies, subassemblies, and components therefor |
| US10323732B2 (en) | 2013-04-19 | 2019-06-18 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US20160040763A1 (en)* | 2013-04-19 | 2016-02-11 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US9677650B2 (en)* | 2013-04-19 | 2017-06-13 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US10400872B2 (en) | 2015-03-31 | 2019-09-03 | Fallbrook Intellectual Property Company Llc | Balanced split sun assemblies with integrated differential mechanisms, and variators and drive trains including balanced split sun assemblies |
| US10047861B2 (en) | 2016-01-15 | 2018-08-14 | Fallbrook Intellectual Property Company Llc | Systems and methods for controlling rollback in continuously variable transmissions |
| US11306818B2 (en) | 2016-01-15 | 2022-04-19 | Fallbrook Intellectual Property Company Llc | Systems and methods for controlling rollback in continuously variable transmissions |
| US10920882B2 (en) | 2016-01-15 | 2021-02-16 | Fallbrook Intellectual Property Company Llc | Systems and methods for controlling rollback in continuously variable transmissions |
| DE102016203661A1 (en) | 2016-03-07 | 2017-09-07 | Volkswagen Aktiengesellschaft | Pedelec drive arrangement |
| US10458526B2 (en) | 2016-03-18 | 2019-10-29 | Fallbrook Intellectual Property Company Llc | Continuously variable transmissions, systems and methods |
| US11667351B2 (en) | 2016-05-11 | 2023-06-06 | Fallbrook Intellectual Property Company Llc | Systems and methods for automatic configuration and automatic calibration of continuously variable transmissions and bicycles having continuously variable transmission |
| US12145690B2 (en) | 2016-05-11 | 2024-11-19 | Enviolo B.V. | Systems and methods for automatic configuration and automatic calibration of continuously variable transmissions and bicycles having continuously variable transmissions |
| DE102017200387B4 (en) | 2017-01-11 | 2018-12-06 | Robert Bosch Gmbh | Heat dissipation of a drive for electric bicycles by air flow |
| DE102017200387A1 (en)* | 2017-01-11 | 2018-07-12 | Robert Bosch Gmbh | Heat dissipation of a drive for electric bicycles by air flow |
| EP3431380A1 (en) | 2017-07-19 | 2019-01-23 | Robert Bosch GmbH | Gear crank drive of a bicycle |
| DE102017212347A1 (en) | 2017-07-19 | 2019-01-24 | Robert Bosch Gmbh | Bottom bracket drive of a bicycle |
| US11215268B2 (en) | 2018-11-06 | 2022-01-04 | Fallbrook Intellectual Property Company Llc | Continuously variable transmissions, synchronous shifting, twin countershafts and methods for control of same |
| US11624432B2 (en) | 2018-11-06 | 2023-04-11 | Fallbrook Intellectual Property Company Llc | Continuously variable transmissions, synchronous shifting, twin countershafts and methods for control of same |
| US12173778B2 (en) | 2018-11-06 | 2024-12-24 | Enviolo B.V. | Continuously variable transmissions, synchronous shifting, twin countershafts and methods for control of same |
| US11174922B2 (en) | 2019-02-26 | 2021-11-16 | Fallbrook Intellectual Property Company Llc | Reversible variable drives and systems and methods for control in forward and reverse directions |
| US11530739B2 (en) | 2019-02-26 | 2022-12-20 | Fallbrook Intellectual Property Company Llc | Reversible variable drives and systems and methods for control in forward and reverse directions |
| US12000458B2 (en) | 2019-02-26 | 2024-06-04 | Fallbrook Intellectual Property Company Llc | Reversible variable drives and systems and methods for control in forward and reverse directions |
| US12442434B2 (en) | 2024-06-04 | 2025-10-14 | Enviolo B.V. | Reversible variable drives and systems and methods for control in forward and reverse directions |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102014007271A1 (en) | Stepless bottom bracket gearbox for LEVs (Light electric vehicles) with integrated electric motor | |
| DE102012023551A1 (en) | Infinitely variable gear system for e.g. bicycles, has chain drive whose gear is located outside gear housing, and pinion bolt driven over chain of chain ring that is rotationally and axial fixedly connected to drive wheel of bicycle | |
| EP3209543B1 (en) | Adjustable friction ring-type transmission for a vehicle operated using motor power and/or pedal force | |
| EP2986492B1 (en) | Vehicle operable by means of a motor and using muscle power | |
| DE102019006708B4 (en) | Bicycle with electric auxiliary drive | |
| WO2015024701A1 (en) | Vehicle with electric auxiliary drive and continuously variable planetary gear unit | |
| EP2226211A1 (en) | Drive device for an electric vehicle | |
| DE112011100163T5 (en) | Hybrid drive system | |
| DE102021000585B4 (en) | Modular drive system | |
| WO2019086064A1 (en) | Drive train comprising two separate shiftable gear mechanisms which are coupled by means of intermediate gear mechanisms | |
| DE102022107137A1 (en) | Circuit arrangement for a bicycle | |
| WO2019185209A1 (en) | Multistage gear assembly | |
| DE102012022953A1 (en) | Continuously variable transmission for use in rotary drives of e.g. bicycles, has small ring, roller support and large ring that are respectively designed as outer gear, bar and inner gear, to receive rotational drive power, and output | |
| DE102020103026A1 (en) | Gearbox and auxiliary drive for a vehicle | |
| DE102013012160B4 (en) | Infinitely variable hub gear for bicycles, pedelecs and e-bikes, with and without automatic adjustment of the gear ratio to the driving speed. | |
| WO2016177494A1 (en) | Arrangement, in particular a vehicle which can be driven electrically and/or by human muscle power with continuously variable transmission | |
| DE102012023150A1 (en) | Infinitely-variable gear system for e.g. bicycles, has clutch axially supported in transmission housing, large toothed wheel small gear driving spur gear, and pinion large gear driving chain drive, which is arranged outside housing | |
| DE102013015210A1 (en) | Continuously variable transmission especially for bicycles with electric drive | |
| DE102014016395B4 (en) | Transmission for vehicles that can be switched under load | |
| WO2017114691A1 (en) | Continuously variable planetary gear mechanism | |
| DE102018008464A1 (en) | Drive train with two separate, coupled by means of intermediate gear shift transmissions | |
| WO2014026754A1 (en) | Continuously variable transmission | |
| EP2298636B9 (en) | Gear assembly for a bicycle with an auxiliary drive | |
| DE202019005932U1 (en) | Bicycle with electric auxiliary drive | |
| WO2017080726A1 (en) | Friction ring transmission, drive and vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R120 | Application withdrawn or ip right abandoned |