DE102013200398A1 - Method for warning against collision of motor vehicle, involves outputting warning signals to possible road users in front end of motor vehicle based on determined collision danger, where signals are immediately perceptible for human senses - Google Patents
Method for warning against collision of motor vehicle, involves outputting warning signals to possible road users in front end of motor vehicle based on determined collision danger, where signals are immediately perceptible for human sensesDownload PDFInfo
- Publication number
- DE102013200398A1 DE102013200398A1DE201310200398DE102013200398ADE102013200398A1DE 102013200398 A1DE102013200398 A1DE 102013200398A1DE 201310200398DE201310200398DE 201310200398DE 102013200398 ADE102013200398 ADE 102013200398ADE 102013200398 A1DE102013200398 A1DE 102013200398A1
- Authority
- DE
- Germany
- Prior art keywords
- motor vehicle
- collision
- vehicle
- warning signal
- warning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription15
- 238000011156evaluationMethods0.000claimsabstractdescription11
- 238000001514detection methodMethods0.000claimsdescription11
- 230000000007visual effectEffects0.000description5
- 230000001133accelerationEffects0.000description4
- 208000027418Wounds and injuryDiseases0.000description3
- 230000006378damageEffects0.000description3
- 208000014674injuryDiseases0.000description3
- 230000003287optical effectEffects0.000description3
- 230000003044adaptive effectEffects0.000description2
- 230000007613environmental effectEffects0.000description2
- 238000005259measurementMethods0.000description2
- 230000002123temporal effectEffects0.000description2
- BUHVIAUBTBOHAG-FOYDDCNASA-N(2r,3r,4s,5r)-2-[6-[[2-(3,5-dimethoxyphenyl)-2-(2-methylphenyl)ethyl]amino]purin-9-yl]-5-(hydroxymethyl)oxolane-3,4-diolChemical compoundCOC1=CC(OC)=CC(C(CNC=2C=3N=CN(C=3N=CN=2)[C@H]2[C@@H]([C@H](O)[C@@H](CO)O2)O)C=2C(=CC=CC=2)C)=C1BUHVIAUBTBOHAG-FOYDDCNASA-N0.000description1
- 238000013459approachMethods0.000description1
- 230000007423decreaseEffects0.000description1
- 230000001419dependent effectEffects0.000description1
- 238000010586diagramMethods0.000description1
- 238000013213extrapolationMethods0.000description1
- 230000002452interceptive effectEffects0.000description1
- 238000012545processingMethods0.000description1
- 230000005855radiationEffects0.000description1
Images
Classifications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q5/00—Arrangement or adaptation of acoustic signal devices
- B60Q5/005—Arrangement or adaptation of acoustic signal devices automatically actuated
- B60Q5/006—Arrangement or adaptation of acoustic signal devices automatically actuated indicating risk of collision between vehicles or with pedestrians
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0953—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Acoustics & Sound (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
Translated fromGermanDie Erfindung betrifft ein Verfahren und eine Vorrichtung zum Warnen vor einer Kollision eines Kraftfahrzeugs.The invention relates to a method and a device for warning against a collision of a motor vehicle.
STAND DER TECHNIKSTATE OF THE ART
Es sind Fahrerassistenzsysteme für Kraftfahrzeuge bekannt, die aufgrund von Ortungsdaten von im Umfeld des eigenen Fahrzeugs erfassten Objekten eine potentiell gefährliche Fahrsituation erkennen und den Fahrer bei einer erkannten Gefahrensituation warnen, damit ein Unfall vermieden werden kann.Driver assistance systems for motor vehicles are known which detect a potentially dangerous driving situation on the basis of location data of objects detected in the surroundings of the own vehicle and warn the driver in the event of a recognized dangerous situation so that an accident can be avoided.
Beispielsweise sind Spurwechselassistenten bekannt, die den Fahrer eines Kraftfahrzeugs beim Wechsel der Fahrspur, z.B. bei Überhol- und Einschermanövern, unterstützen. Eine wesentliche Funktion eines Spurwechselassistenten besteht darin, den Fahrer über Fahrzeuge zu informieren bzw. ihn vor Fahrzeugen zu warnen, die sich schnell von hinten annähern oder sich im toten Winkel befinden. Spurwechselassistenten können so wesentlich zur Vermeidung von Kollisionsunfällen beitragen. Beispielsweise beschreibt
Es sind auch Sicherheitssysteme für Kraftfahrzeuge bekannt, die das Bevorstehen einer Kollision des eigenen Fahrzeugs mit einem Objekt ermitteln und bei Erkennen einer bevorstehenden und unausweichlichen Kollision Maßnahmen einleiten, die beispielsweise den Fahrer des Fahrzeugs warnen und/oder die Kollisionsstärke reduzieren und/oder das Verletzungsrisiko der Insassen lindern und/oder das Fahrzeug so beeinflussen, dass das Verletzungsrisiko der Insassen vermindert wird. Es sind beispielsweise Sicherheitssysteme bekannt, die eine Notbremsung einleiten können oder beispielsweise Gurtstraffer auslösen können.
OFFENBARUNG DER ERFINGUNGDISCLOSURE OF THE INVENTION
Bekannte Sicherheitssysteme sind dazu eingerichtet, durch Ausgabe von Warnsignalen insbesondere an den Fahrer des Fahrzeugs eine Kollision möglichst zu vermeiden. Im Falle einer unausweichlichen Kollision sind bekannte Sicherheitssysteme beispielsweise dazu eingerichtet, durch Eingriff in die Längsregelung des Fahrzeugs, wie etwa bei einem Notbremsassistenten, die Schwere einer Kollision zu mindern, oder, beispielsweise durch das Auslösen von Gurtstraffern, das Verletzungsrisiko der Fahrzeuginsassen zu vermindern.Known safety systems are set up to avoid a collision as far as possible by issuing warning signals, in particular to the driver of the vehicle. For example, in the case of an inevitable collision, known safety systems are adapted to reduce the severity of a collision by interfering with the longitudinal control of the vehicle, such as an emergency brake assist, or by reducing the risk of injury to vehicle occupants, for example by triggering pretensioners.
Aufgabe der Erfindung ist es, ein Verfahren und eine Vorrichtung zu schaffen, die es ermöglichen, im Falle einer bevorstehenden Kollision andere Verkehrsteilnehmer im Vorfeld des eigenen Fahrzeugs zu warnen.The object of the invention is to provide a method and a device which make it possible, in the event of an imminent collision, to warn other road users in advance of their own vehicle.
Diese Aufgabe wird erfindungsgemäß gelöst durch ein Verfahren zum Warnen vor einer Kollision eines Kraftfahrzeugs, mit den Schritten:
- – Erfassen eines Objektes im Umfeld des eigenen Kraftfahrzeugs mit einer Objekterfassungseinrichtung des eigenen Kraftfahrzeugs;
- – Ermitteln einer Gefahr einer wahrscheinlichen Kollision des eigenen Kraftfahrzeugs mit dem erfassten Objekt; und
- – auf Grundlage der ermittelten Kollisionsgefahr, Ausgeben eines für menschliche Sinne unmittelbar wahrnehmbaren Warnsignals an mögliche Verkehrsteilnehmer im Vorfeld des eigenen Kraftfahrzeugs.
- - Detecting an object in the environment of the own motor vehicle with an object detection device of the own motor vehicle;
- Determining a danger of a probable collision of the own motor vehicle with the detected object; and
- On the basis of the determined risk of collision, outputting a warning signal directly perceptible to human senses to possible road users in advance of their own motor vehicle.
Die Erfindung bietet den Vorteil, dass im Falle einer Kollisionsgefahr für das eigene Kraftfahrzeug mit einem Objekt im Umfeld des eigenen Kraftfahrzeugs, beispielsweise einem anderen Fahrzeug oder einem Hindernis, andere Verkehrsteilnehmer im Vorfeld des eigenen Fahrzeugs gewarnt werden können. Es ist im allgemeinen nicht davon auszugehen, dass Fahrzeuge anderer Fahrzeugführer mit Sicherheitseinrichtungen zur Warnung des Fahrzeugsführers vor einer wahrscheinlichen Kollision verfügen. Indem ein für menschliche Sinne unmittelbar wahrnehmbares Warnsignal, beispielsweise ein akustisches und/oder optisches Warnsignal, an andere Verkehrsteilnehmer ausgegeben wird, ist dennoch eine Warnung der Verkehrsteilnehmer möglich. Möglichen sich im Vorfeld des Fahrzeugs befindenden Verkehrsteilnehmern kann es dadurch beispielsweise ermöglicht werden, den Gefahrenbereich zu verlassen oder sich auf einen bevorstehenden Unfall vorzubereiten. Auch Fußgänger und Radfahrer können so gewarnt werden.The invention has the advantage that in the event of a risk of collision for one's own motor vehicle with an object in the environment of one's own motor vehicle, for example another vehicle or an obstacle, other road users can be warned in advance of their own vehicle. It is generally not expected that vehicles of other drivers with safety devices to warn the driver of a probable collision. By an immediately noticeable to human senses warning signal, such as a Acoustic and / or visual warning signal is issued to other road users, however, a warning of road users is possible. It is possible, for example, to leave the danger area or to prepare for an imminent accident if road users are in the lead-up to the vehicle. Even pedestrians and cyclists can be warned.
Durch die automatische Ausgabe des Warnsignals kann der Fahrzeugführer seine Aufmerksamkeit auf Maßnahmen zur Vermeidung oder Minderung der Schwere der wahrscheinlichen Kollision richten, so dass auch in kritischen Situationen, in denen der Fahrzeugführer keine Gelegenheit hätte, selbst beispielsweise noch die Hupe zu betätigen, eine wirksame Warnung anderer Verkehrsteilnehmer erfolgen kann.By automatically outputting the warning signal, the driver can focus his attention on measures to prevent or reduce the severity of the probable collision, so that even in critical situations in which the driver would have no opportunity, even for example, to operate the horn, an effective warning other road users can take place.
Vorteilhafte Ausgestaltungen der Erfindung ergeben sich aus den Unteransprüchen.Advantageous embodiments of the invention will become apparent from the dependent claims.
Die Objekterfassungseinrichtung kann beispielsweise eine Objektortungseinrichtung umfassen, beispielsweise einen Radarsensor, einen Lidarsensor, ein Videosystem oder eine Kombination hieraus umfassen.The object detection device may comprise, for example, an object locating device, for example a radar sensor, a lidar sensor, a video system or a combination thereof.
Das Warnsignal kann beispielsweise ein akustisches Warnsignal und/oder ein Lichtwarnsignal umfassen. Das vom menschliche Sinne unmittelbar wahrnehmbare Warnsignal kann beispielsweise ausgegeben werden über wenigstens eine akustische Warnsignaleinheit und/oder wenigstens eine optische Warnsignaleinheit oder Lichtsignalwarneinheit des eigenen Kraftfahrzeugs, beispielsweise über eine Hupe, Scheinwerfer, Blinker, Nebelscheinwerfer, die ohnehin am eigenen Kraftfahrzeug vorhanden sind, und/oder über wenigstens eine zusätzliche Warnsignaleinheit des eigenen Kraftfahrzeugs ausgegeben werden.The warning signal may include, for example, an acoustic warning signal and / or a light warning signal. The warning signal directly perceptible by the human senses can be output, for example, via at least one acoustic warning signal unit and / or at least one optical warning signal unit or light signal warning unit of the own motor vehicle, for example via a horn, headlight, turn signal, fog lights, which are already present on the own motor vehicle, and / or via at least one additional warning signal unit of the own motor vehicle.
Das Ermitteln einer Gefahr einer wahrscheinlichen Kollision des eigenen Fahrzeugs mit einem erfassten Objekt kann das Ermitteln eines Gefahrenwertes für eine Kollision umfassen. Der Gefahrenwert kann eine kontinuierliche Variable sein, beispielsweise mit einem Wertebereich zwischen 0 und 1, kann jedoch im einfachsten Fall auch eine Ja/Nein-Aussage sein, die angibt, ob eine Kollision des eigenen Kraftfahrzeugs eine vorbestimmte Wahrscheinlichkeit erreicht oder übertrifft, beispielsweise überwiegend wahrscheinlich ist, d.h. eine Wahrscheinlichkeit größer 0,5 aufweist.Determining a danger of a probable collision of the own vehicle with a detected object may include determining a danger value for a collision. The danger value may be a continuous variable, for example with a value range between 0 and 1, but in the simplest case may also be a yes / no statement indicating whether a collision of the own motor vehicle reaches or exceeds a predetermined probability, for example predominantly likely is, ie has a probability greater than 0.5.
Der Gefahrenwert kann beispielsweise aus einem wenigstens zwei Stufen umfassenden Wertebereich ermittelt werden. Beispielsweise kann bei einem Gefahrenwert einer ersten Gefahrenstufe vorgesehen sein, dass ein erstes Warnsignal am Verkehrsteilnehmer im Vorfeld des eigenen Fahrzeugs ausgegeben wird, und bei einem Gefahrenwert, der eine zweite Stufe erreicht, ein zweites, sich von dem ersten Warnsignal unterscheidendes Warnsignal an Verkehrsteilnehmer im Vorfeld des eigenen Fahrzeugs ausgegeben wird. Beispielsweise kann ein Gefahrenwert ermittelt werden, der eine erste Gefahrenstufe erreicht, wenn eine Kollision des eigenen Kraftfahrzeugs mit dem erfassten Objekt wahrscheinlich abwendbar ist, und ein Gefahrenwert, der eine zweite Gefahrenstufe erreicht, kann ermittelt werden, wenn eine Kollision des eigenen Kraftfahrzeugs mit dem erfassten Objekt wahrscheinlich unabwendbar ist. Die den Gefahrenstufen zugeordneten, ausgegebenen ersten und zweiten Warnsignale können sich beispielsweise hinsichtlich einer Signalintensität unterscheiden und/oder hinsichtlich der eingesetzten Warnsignaleinheiten des eigenen Kraftfahrzeugs. So kann sich beispielsweise ein erstes Warnsignal an einen Fahrzeugführer eines potentiell mit dem eigenen Fahrzeug kollidierenden, als Objekt erfassten Fahrzeugs richten, während sich ein zweites Warnsignal an alle Verkehrsteilnehmer im Umfeld des eigenen Fahrzeugs richten kann. Somit kann ein zweites Warnsignal ausgegeben werden, wenn die Gefahr einer Kollision als wahrscheinlich unabwendbar ermittelt wird.The danger value can be determined, for example, from a value range comprising at least two levels. For example, in the event of a danger value of a first danger level, it may be provided that a first warning signal is output to the road user in advance of the own vehicle, and if there is a danger value that reaches a second level, a second warning signal, which differs from the first warning signal, to traffic participants in advance of the own vehicle is spent. For example, a hazard value can be determined that achieves a first danger level when a collision of the own motor vehicle with the detected object is likely to be averted, and a danger value that reaches a second danger level can be determined when a collision of the own motor vehicle with the detected one Object is probably inevitable. The first and second warning signals assigned to the danger levels may differ, for example, with regard to a signal intensity and / or with regard to the warning signal units of the own motor vehicle used. Thus, for example, a first warning signal can be directed to a driver of a vehicle potentially colliding with his own vehicle, detected as an object, while a second warning signal can be directed to all road users in the vicinity of their own vehicle. Thus, a second warning signal can be issued if the risk of a collision is determined to be probably unavoidable.
Weiter wird die genannte Aufgabe gelöst durch eine Vorrichtung zur Warnung vor einer Kollision eines Kraftfahrzeugs, aufweisend:
- – eine Objekterfassungseinrichtung zum Erfassen eines Objektes im Umfeld des eigenen Kraftfahrzeugs; und
- – eine Auswerteeinheit, die dazu eingerichtet ist, eine Gefahr einer wahrscheinlichen Kollision des eigenen Kraftfahrzeugs mit einem von der Objekterfassungseinrichtung erfassten Objekts zu ermitteln und auf Grundlage der ermittelten Kollisionsgefahr eine Warnsignaleinheit des eigenen Kraftfahrzeugs anzusteuern, um ein für menschliche Sinne unmittelbar wahrnehmbares Warnsignal an mögliche Verkehrsteilnehmer im Vorfeld des eigenen Kraftfahrzeugs auszugeben.
- - An object detecting means for detecting an object in the environment of the own motor vehicle; and
- - An evaluation unit which is adapted to determine a risk of a probable collision of the own motor vehicle with an object detected by the object detection device and to control a warning signal unit of the own motor vehicle on the basis of the determined risk of collision, to an immediately perceivable for human senses warning signal to potential road users to spend in advance of their own motor vehicle.
Beispielsweise kann die Vorrichtung die Warnsignaleinheit zum Ausgeben eines für menschliche Sinne unmittelbar wahrnehmbaren Warnsignals an mögliche Verkehrsteilnehmer im Vorfeld des eigenen Kraftfahrzeugs umfassen.By way of example, the device may comprise the warning signal unit for outputting a warning signal, which is directly perceptible to human senses, to possible road users in advance of their own motor vehicle.
KURZE BESCHREIBUNG DER ZEICHNUNGENBRIEF DESCRIPTION OF THE DRAWINGS
Ausführungsbeispiele der Erfindung sind in den Zeichnungen dargestellt und in der nachfolgenden Beschreibung näher erläutert.Embodiments of the invention are illustrated in the drawings and explained in more detail in the following description.
Es zeigen:Show it:
BESCHREIBUNG VON AUSFÜHRUNGSBEISPIELENDESCRIPTION OF EMBODIMENTS
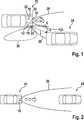
Im gezeigten Beispiel handelt es sich bei einem im mittleren Bereich der Fahrzeugfront angeordneten, ersten Ortungsgerät
Im gezeigten Beispiel sind ein linkes und ein rechtes weiteres Ortungsgerät
Wenn die Ortungsgeräte
Zumindest für ein sich im Erfassungsbereich des Ortungsgeräts
Wenn beispielsweise die Auswerteeinheit
Bei der Ermittelung des Gefahrenwertes können weitere Kriterien berücksichtigt werden, beispielsweise mögliche Beschleunigungsverläufe, insbesondere mit negativen Beschleunigungswerten, des eigenen Kraftfahrzeugs
Allgemein ist der Gefahrenwert eine Funktion der Ortungsdaten der Ortungsgeräte
Im gezeigten Beispiel hat das Ortungsgerät
Im gezeigten Beispiel hat das Ortungsgerät
Ein Spurwechsel des fremden Fahrzeugs
Zu Erkennung eines Spurwechsels eines seitlich vor oder neben dem eigenen Fahrzeug
Basierend auf den zeitlichen Verlauf des seitlichen Abstands Y eines Fahrzeugs
Je nach der Wahrscheinlichkeit eines Spurwechsels und/oder je nach der Wahrscheinlichkeit einer Kollision unter der Voraussetzung, dass ein Spurwechsel stattfindet, können unterschiedliche Gefahrenwerte für eine Kollision ermittelt werden. Beispielsweise kann, wenn der seitliche Abstand Y einen Mindestabstand noch nicht unterschritten hat, eine Gefahrenstufe angenommen werden, bei der ein erstes Warnsignal ausgegeben wird, um den Fahrer des Fahrzeugs
Die akustischen und/oder optischen Warnsignale, d.h. Lichtwarnsignale, werden insbesondere nach außerhalb des eigenen Kraftfahrzeugs
Zur Bestimmung des zeitlichen Abstandes Y kann beispielsweise Information über den Abstand r und den Azimutwinkel des erfassten Fahrzeugs
Zur Ermittelung einer Kollisionsgefahr kann auch eine momentane Quergeschwindigkeit und/oder momentane Gierrate des Fahrzeugs
Bei der Ermittelung der Kollisionsgefahr kann auch Information über Ausweichmöglichkeiten auf benachbarte Fahrspuren berücksichtigt werden, wenn durch ein Ausweichen eine Kollision wahrscheinlich vermieden werden kann. Lässt eine ermittelte Zeit bis zur Kollision jedoch keine ausreichende Zeit, um den Fahrzeugführer des Fahrzeugs
In dem in
Bei den oben beschriebenen Beispielen kann eine Zuordnung der Warnsignale je nach einer Gefahrenstufe erfolgen. Zusätzlich oder alternativ kann optional basierend auf wenigstens einem ermittelten Umweltparameter und/oder wenigstes einem Fahrparameter des eigenen Fahrzeugs eine Auswahl einer Warnsignaleinheit und/oder eines Warnsignals erfolgen. Ein Beispiel für einen Fahrparameter ist die Geschwindigkeit des eigenen Fahrzeugs. So kann beispielsweise bei Überschreiten eines Geschwindigkeitswertes das Warnsignal stets ein Lichtwarnsignal umfassen. Dadurch kann beispielsweise auf Autobahnen bei höheren Geschwindigkeiten, bei denen etwa aufgrund von Fahrgeräuschen eine Hupe schlechter zu hören ist, stets eine Warnung mit Licht erfolgen. Ein Beispiel für einen Umweltparameter ist die Umgebungshelligkeit, insbesondere eine Stärke einer Sonneneinstrahlung, die beispielsweise mittels eines Helligkeitssensors gemessen werden kann. So kann beispielsweise bei Überschreiten eines Helligkeitswertes das Warnsignal stets ein akustisches Warnsignal umfassen. Dadurch kann bei großer Helligkeit, bei der ein Lichtsignal unauffälliger ist, stets eine akustische Warnung erfolgen.In the examples described above, an assignment of the warning signals can take place depending on a danger level. Additionally or alternatively, a selection of a warning signal unit and / or a warning signal can optionally be carried out based on at least one determined environmental parameter and / or at least one driving parameter of the own vehicle. An example of a driving parameter is the speed of your own vehicle. For example, when a speed value is exceeded, the warning signal always includes a light warning signal. As a result, for example, on highways at higher speeds, in which a horn is worse to hear, for example, due to driving noise, always be a warning with light. An example of an environmental parameter is the ambient brightness, in particular a strength of solar radiation, which can be measured, for example, by means of a brightness sensor. For example, when a brightness value is exceeded, the warning signal always includes an acoustic warning signal. This can always be an acoustic warning at high brightness, in which a light signal is less noticeable.
Während bei den beschriebenen Beispielen von zwei Gefahrenstufen, denen unterschiedliche Warnsignale zugeordnet sind, ausgegangen wurde, ist es auch denkbar, lediglich eine Gefahrenstufe vorzusehen, bei deren Überschreiten ein Warnsignal ausgegeben wird. Beispielsweise kann das Warnsignal ausgegeben werden, wenn die Gefahr einer Kollision überwiegend wahrscheinlich ist, also eine Wahrscheinlichkeit größer als 50% aufweist. Beispielsweise kann das Warnsignal ausgegeben werden, wenn das Bevorstehen einer unausweichlichen Kollision ermittelt wird.While it has been assumed in the described examples of two danger levels, which are associated with different warning signals, it is also conceivable to provide only one danger level above which a warning signal is output. By way of example, the warning signal can be output if the risk of a collision is predominantly probable, ie has a probability greater than 50%. For example, the warning signal can be output when the imminence of an inevitable collision is determined.
ZITATE ENTHALTEN IN DER BESCHREIBUNG QUOTES INCLUDE IN THE DESCRIPTION
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.This list of the documents listed by the applicant has been generated automatically and is included solely for the better information of the reader. The list is not part of the German patent or utility model application. The DPMA assumes no liability for any errors or omissions.
Zitierte PatentliteraturCited patent literature
- EP 1612082 A1[0003]EP 1612082 A1[0003]
- EP 1387183 B1[0004]EP 1387183 B1[0004]
- DE 10328755 A1[0005]DE 10328755 A1[0005]
Claims (10)
Translated fromGermanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE201310200398DE102013200398A1 (en) | 2013-01-14 | 2013-01-14 | Method for warning against collision of motor vehicle, involves outputting warning signals to possible road users in front end of motor vehicle based on determined collision danger, where signals are immediately perceptible for human senses |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE201310200398DE102013200398A1 (en) | 2013-01-14 | 2013-01-14 | Method for warning against collision of motor vehicle, involves outputting warning signals to possible road users in front end of motor vehicle based on determined collision danger, where signals are immediately perceptible for human senses |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| DE102013200398A1true DE102013200398A1 (en) | 2014-07-17 |
Family
ID=51015045
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE201310200398PendingDE102013200398A1 (en) | 2013-01-14 | 2013-01-14 | Method for warning against collision of motor vehicle, involves outputting warning signals to possible road users in front end of motor vehicle based on determined collision danger, where signals are immediately perceptible for human senses |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102013200398A1 (en) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016225866A1 (en)* | 2016-12-21 | 2018-06-21 | Robert Bosch Gmbh | Method for operating a warning device of a rail vehicle |
| WO2019048683A1 (en)* | 2017-09-11 | 2019-03-14 | Knorr-Bremse Systeme für Schienenfahrzeuge GmbH | METHOD AND DEVICE FOR DISTRIBUTING A COLLISION SIGNAL TO THE ENVIRONMENT OF A MEDIUM-LEADED ROADWAY |
| CN109641594A (en)* | 2016-08-19 | 2019-04-16 | 奥迪股份公司 | Method and motor vehicle for operating a motor vehicle operating at least semi-autonomously |
| WO2020108937A1 (en)* | 2018-11-30 | 2020-06-04 | Valeo Schalter Und Sensoren Gmbh | Method for predicting a premature lane change, driver assistance system, motor vehicle, and computer program product |
| CN112249008A (en)* | 2020-09-30 | 2021-01-22 | 南京航空航天大学 | Unmanned automobile early warning method aiming at complex dynamic environment |
| CN112277795A (en)* | 2019-07-24 | 2021-01-29 | 大众汽车股份公司 | Warning of possible collision of motor vehicles |
| CN113963577A (en)* | 2021-11-03 | 2022-01-21 | 深圳市尖峰时刻电子有限公司 | Vehicle collision risk assessment early warning system |
| CN114919574A (en)* | 2022-04-29 | 2022-08-19 | 东风汽车集团股份有限公司 | Automatic emergency avoidance system based on running state of front vehicle and control method |
| DE102021204481A1 (en) | 2021-05-04 | 2022-11-10 | Robert Bosch Gesellschaft mit beschränkter Haftung | Method for warning a vehicle operator of an imminent collision in a parking environment |
| DE102023101129A1 (en) | 2023-01-18 | 2024-07-18 | Audi Aktiengesellschaft | Procedure for operating a motor vehicle |
| DE102023105823A1 (en)* | 2023-03-09 | 2024-09-12 | Audi Aktiengesellschaft | Driver assistance system for a road-bound motor vehicle |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10328755A1 (en) | 2002-07-05 | 2004-07-15 | Continental Teves Ag & Co. Ohg | System to avoid rear-end collisions |
| EP1612082A1 (en) | 2004-06-12 | 2006-01-04 | Robert Bosch Gmbh | Lane-changing assistant for motor vehicle |
| EP1387183B1 (en) | 2002-08-02 | 2012-06-20 | Robert Bosch Gmbh | Method and apparatus for determining an unavoidable collision event |
- 2013
- 2013-01-14DEDE201310200398patent/DE102013200398A1/enactivePending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10328755A1 (en) | 2002-07-05 | 2004-07-15 | Continental Teves Ag & Co. Ohg | System to avoid rear-end collisions |
| EP1387183B1 (en) | 2002-08-02 | 2012-06-20 | Robert Bosch Gmbh | Method and apparatus for determining an unavoidable collision event |
| EP1612082A1 (en) | 2004-06-12 | 2006-01-04 | Robert Bosch Gmbh | Lane-changing assistant for motor vehicle |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11377113B2 (en) | 2016-08-19 | 2022-07-05 | Audi Ag | Method for operating an at least partially autonomous motor vehicle and motor vehicle |
| CN109641594A (en)* | 2016-08-19 | 2019-04-16 | 奥迪股份公司 | Method and motor vehicle for operating a motor vehicle operating at least semi-autonomously |
| DE102016225866B4 (en) | 2016-12-21 | 2023-03-16 | Robert Bosch Gmbh | Method for operating a warning device on a rail vehicle |
| DE102016225866A1 (en)* | 2016-12-21 | 2018-06-21 | Robert Bosch Gmbh | Method for operating a warning device of a rail vehicle |
| WO2019048683A1 (en)* | 2017-09-11 | 2019-03-14 | Knorr-Bremse Systeme für Schienenfahrzeuge GmbH | METHOD AND DEVICE FOR DISTRIBUTING A COLLISION SIGNAL TO THE ENVIRONMENT OF A MEDIUM-LEADED ROADWAY |
| DE102018130431A1 (en)* | 2018-11-30 | 2020-06-04 | Valeo Schalter Und Sensoren Gmbh | Method for predicting an early lane change, driver assistance system, motor vehicle and computer program product |
| WO2020108937A1 (en)* | 2018-11-30 | 2020-06-04 | Valeo Schalter Und Sensoren Gmbh | Method for predicting a premature lane change, driver assistance system, motor vehicle, and computer program product |
| CN112277795A (en)* | 2019-07-24 | 2021-01-29 | 大众汽车股份公司 | Warning of possible collision of motor vehicles |
| CN112249008B (en)* | 2020-09-30 | 2021-10-26 | 南京航空航天大学 | Unmanned automobile early warning method aiming at complex dynamic environment |
| CN112249008A (en)* | 2020-09-30 | 2021-01-22 | 南京航空航天大学 | Unmanned automobile early warning method aiming at complex dynamic environment |
| DE102021204481A1 (en) | 2021-05-04 | 2022-11-10 | Robert Bosch Gesellschaft mit beschränkter Haftung | Method for warning a vehicle operator of an imminent collision in a parking environment |
| CN113963577A (en)* | 2021-11-03 | 2022-01-21 | 深圳市尖峰时刻电子有限公司 | Vehicle collision risk assessment early warning system |
| CN114919574A (en)* | 2022-04-29 | 2022-08-19 | 东风汽车集团股份有限公司 | Automatic emergency avoidance system based on running state of front vehicle and control method |
| CN114919574B (en)* | 2022-04-29 | 2024-10-25 | 东风汽车集团股份有限公司 | Automatic emergency avoidance system based on front vehicle running state and control method |
| DE102023101129A1 (en) | 2023-01-18 | 2024-07-18 | Audi Aktiengesellschaft | Procedure for operating a motor vehicle |
| DE102023105823A1 (en)* | 2023-03-09 | 2024-09-12 | Audi Aktiengesellschaft | Driver assistance system for a road-bound motor vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102013200398A1 (en) | Method for warning against collision of motor vehicle, involves outputting warning signals to possible road users in front end of motor vehicle based on determined collision danger, where signals are immediately perceptible for human senses | |
| DE102004062497B4 (en) | Method and device for reducing the risk of a rear-end collision | |
| DE112005002786B4 (en) | Method for operating a collision avoidance or collision mitigation system of a vehicle | |
| DE102016226040B4 (en) | Method and device in a motor vehicle for pedestrian protection | |
| DE102007060862B4 (en) | Emergency braking system | |
| EP2626268B1 (en) | Device for protecting the outside mirror of a motor vehicle from collision with obstacles on the side | |
| DE102009007885B4 (en) | Method for detecting vehicles entering or leaving one's own lane | |
| DE102007039039B4 (en) | Control of safety means of a motor vehicle | |
| DE102011116822B4 (en) | Monitoring system for monitoring the surroundings of vehicles, in particular motor and/or commercial vehicles | |
| DE102012108563A1 (en) | Method and devices for collision warning during lane changes | |
| DE102012005075A1 (en) | A method of warning against a possible collision of an object with a vehicle door of a stationary motor vehicle | |
| DE102013020733A1 (en) | Assistance system and assistance system for assisting a vehicle driver in starting and / or turning a vehicle | |
| DE102013021813B4 (en) | Driver assistance system with adaptive reaction threshold | |
| DE102005062275A1 (en) | Method for detecting impending rear end impact upon first vehicle entails additionally checking whether second vehicle is starting overtaking action, and if overtaking maneuver is detected, a rear end impact is excluded | |
| DE19933782A1 (en) | Preventing shunt accidents involves computing time until vehicles will collide taking into account value for deceleration of following vehicle, initiating an action if time below threshold | |
| DE102005036714A1 (en) | Method for assisting the driver of a vehicle in a lane change and driver assistance system for carrying out the method | |
| EP1853454A1 (en) | Method for recognising an imminent overtake | |
| DE102011013486A1 (en) | Driver assistance system for vehicle e.g. motor car, initiates braking process when calculated probability of collision with respect to object crosses threshold value | |
| DE102005062274A1 (en) | Detection process for impending rear-end impact has delay factor applied to second vehicle, such as relative delay or inherent delay of second vehicle | |
| DE102017003440B4 (en) | Method for operating a vehicle, in particular a motor vehicle | |
| DE102011106082A1 (en) | Method for partial automatic initiation of collision-avoiding driving maneuver of motor vehicle, involves determining clearance evasion so that flashing signal is provided automatically to indicate direction in which the evasion leads | |
| EP1612082A1 (en) | Lane-changing assistant for motor vehicle | |
| DE102006037015A1 (en) | Motor vehicles` rear end collisions avoiding device, has sensor system determining allocation of neighboring traces, and evaluation unit selecting parameter and value based on probability for overhauling procedure | |
| DE102005050720B4 (en) | Method for warning subsequent vehicles in frontal escalating longitudinal traffic | |
| DE102012018120A1 (en) | Lane changing assistance system for motor car, has evaluation unit driving rear indicators of car such that light intensity and/or frequency of indicators is increased if alarm is generated and indicating lane change intention on lane |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R012 | Request for examination validly filed | ||
| R016 | Response to examination communication |