DE102009032552A1 - A method of displaying overflown terrain on a display device aboard an aircraft - Google Patents
A method of displaying overflown terrain on a display device aboard an aircraftDownload PDFInfo
- Publication number
- DE102009032552A1 DE102009032552A1DE102009032552ADE102009032552ADE102009032552A1DE 102009032552 A1DE102009032552 A1DE 102009032552A1DE 102009032552 ADE102009032552 ADE 102009032552ADE 102009032552 ADE102009032552 ADE 102009032552ADE 102009032552 A1DE102009032552 A1DE 102009032552A1
- Authority
- DE
- Germany
- Prior art keywords
- terrain
- aircraft
- threat
- representation
- collision probability
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Classifications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/80—Anti-collision systems
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C23/00—Combined instruments indicating more than one navigational value, e.g. for aircraft; Combined measuring devices for measuring two or more variables of movement, e.g. distance, speed or acceleration
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/05—Geographic models
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/70—Arrangements for monitoring traffic-related situations or conditions
- G08G5/76—Arrangements for monitoring traffic-related situations or conditions for monitoring atmospheric conditions
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Remote Sensing (AREA)
- Geometry (AREA)
- Software Systems (AREA)
- Radar, Positioning & Navigation (AREA)
- Computer Graphics (AREA)
- Theoretical Computer Science (AREA)
- Traffic Control Systems (AREA)
Abstract
Translated fromGerman
Description
Translated fromGermanDieErfindung betrifft ein Verfahren zur Darstellung des überflogenenGeländes auf einem geeigneten Anzeigegerät anBord eines Luftfahrzeugs, z. B. auf der integrierten Anzeige eineselektronischen Fluginstrumentensystems (EFIS = Electronic FlightInstrument System).TheThe invention relates to a method for displaying the overflownTerrain on a suitable display deviceBoard of an aircraft, z. B. on the integrated display of aelectronic flight instrument system (EFIS = Electronic FlightInstrument system).
HINTERGRUND DER ERFINDUNGBACKGROUND OF THE INVENTION
BeiFlügen über hügliges oder bergiges Geländeund relativ unbekanntem Terrain, gepaart mit einer niedrigen Flughöhe überGrund, wie z. B. im Landeanflug oder bei operationellen Missionseinsätzeneines militärischen Transportflugzeugs oder bei Hubschraubernund Kleinflugzeugen mit relativ geringer, absoluter Gipfelhöhe,kann es zu ungewollten, bedrohlichen Annäherungen des Luftfahrzeugsan das Gelände kommen – insbesondere bei eingeschränktenSichtverhältnissen.atFlights over hilly or mountainous terrainand relatively unknown terrain, coupled with a low altitude aboveReason, such. B. in approach or operational mission missionsa military transport plane or helicoptersand small aircraft with relatively low, absolute summit heights,It can lead to unwanted, threatening approaches of the aircraftcome to the site - especially in restrictedVisibility.
ElektronischeFluginstrumentensysteme (EFIS) moderner Luftfahrzeuge sind mit einersogenannten ”Moving Map” zur intuitiven, zeitgenauenVisualisierung der momentanen geo-referenzierten Position sowieder aktuellen Flugrichtung des Luftfahrzeugs über dem überflogenenGelände ausgestattet.electronicFlight instrument systems (EFIS) of modern aircraft are equipped with aso-called "Moving Map" for intuitive, timelyVisualization of the current geo-referenced position as wellthe current flight direction of the aircraft over the overflownTerrain equipped.
Diebekannten Darstellungsformen zur Visualisierung des Geländesauf einer ”Moving Map” beschränken sichzur Zeit auf die zwei folgenden grundlegenden Ansätze:
- a) Darstellung der absoluten, geographischenHöhen – analog der Farbgebung einer topographischenKarte.
- b) Darstellung der Geländehöhe in Relationzur momentanen Flughöhe des Luftfahrzeugs (dynamisch veränderlich)oder in Relation zur absoluten Gipfelhöhe des Luftfahrzeugs(statisch unveränderlich). Diese Form der Darstellung istunter dem Begriff der höhenkodierten Farbgebung des Geländesbekannt.
- a) Representation of the absolute, geographical heights - analogous to the coloring of a topographical map.
- b) Representation of the terrain altitude in relation to the current altitude of the aircraft (dynamically variable) or in relation to the absolute altitude of the aircraft (static immutable). This form of representation is known by the concept of height-coded color of the terrain.
DerVorteil der Darstellungsform b) gegenüber der von a) liegtin der Tatsache begründet, dass durch die höhenkodierteFarbgebung des Geländes eine zusätzliche Warnfunktionalitätimplementiert wird. Die für das Luftfahrzeug als bedrohlicheingestuften Bereiche des Terrains können bei dieser Form derDarstellung z. B. in rötlichen oder orangefarbenen Farbtönenbesonders hervorgehoben werden, um eine visuelle Warnung zu generieren.Of theAdvantage of the form of representation b) compared to that of a)justified in the fact that by the height-codedColoring the site an additional warning functionalityis implemented. The threat to the aircraftclassified areas of the terrain can in this form ofRepresentation z. B. in reddish or orange shadesbe specially highlighted to generate a visual warning.
DerNachteil der Darstellungsform b) liegt jedoch in der relativen Einfachheitdieser Warnfunktionalität begründet. Dies führtzu einer möglicherweise mangelhaften Differenzierung inBezug auf die tatsächliche Bedrohung des Geländesfür das Luftfahrzeug. Ein anschauliches Beispiel hierfürist in
Nochdeutlicher wird der Nachteil der einfachen, höhenkodiertenFarbgebung, wenn die als kritisch eingestuften Bereiche des Geländesmit ihrer roten bzw. orangefarbenen Warndarstellung hinter dem Luftfahrzeugliegen – in Bereichen also, von denen sich das Luftfahrzeugmomentan entfernt oder sich nicht weiter annähert.Yetthe disadvantage of the simple, height-coded is clearerColoring, if classified as critical areas of the terrainwith her red or orange warning behind the aircraftlie - in areas thus, of which the aircraftcurrently removed or not approaching.
DerErfindung liegt deshalb die Aufgabe zugrunde, eine farbliche Geländedarstellungzu erzeugen, mit der man die tatsächliche Bedrohung desGeländes für das Luftfahrzeug zur Anzeige bringen kann.Of theThe invention is therefore based on the object, a color terrain representationto generate the actual threat of theTerrain for the aircraft can be displayed.
DieseAufgabe wird mit dem Verfahren nach Patentanspruch 1 gelöst.Vorteilhafte Ausführungen der Erfindung sowie eine Vorrichtung,die dieses Verfahren implementiert und zur Anzeige bringt, sindGegenstand von weiteren Patentansprüchen.TheseTask is solved by the method according to
ZUSAMMENFASSUNG DER ERFINDUNGSUMMARY OF THE INVENTION
Einebekannte Darstellungsform zur Visualisierung des Geländesauf einer ”Moving Map” ist die sog. höhenkodiertenFarbgebung des Geländes. Bei dieser Darstellungsform wirddie Geländehöhe in Relation zur momentanen Flughöhedes Luftfahrzeugs (dynamisch veränderlich) oder in Relationzur absoluten Gipfelhöhe des Luftfahrzeugs (statisch unveränderlich)farblich hervorgehoben. Dadurch implementiert die höhenkodierteFarbgebung des Geländes eine einfache Warnfunktionalität,welche vor allen höheren Geländeerhebungen warnt – unabhängigvon Flugrichtung, Fluglage, Geschwindigkeit, Abstand und weiterenrelevanten Kenngrößen. Diese einfache Warnfunktionalitätwird erfindungsgemäß so erweitert, dass die tatsächlicheBedrohung des Geländes für das Luftfahrzeug zurAnzeige gebracht wird.Awell-known form of presentation for the visualization of the terrainon a "moving map" is the so-called height-codedColor of the terrain. In this form of presentation isthe terrain height in relation to the current altitudeof the aircraft (dynamically changeable) or in relationto the absolute height of the aircraft (static immutable)Highlighted in color. This implements the height-codedColoring the terrain a simple warning functionality,which warns against all higher terrain surveys - independentof flight direction, attitude, speed, distance and morerelevant characteristics. This simple warning functionalityis extended according to the invention so that the actualThreat to the terrain for the aircraftDisplay is brought.
Dabeiwird die tatsächliche Bedrohung des Geländes fürdas Luftfahrzeug ermittelt, in dem zu jedem dargestellten Punktdes Geländes die Wahrscheinlichkeit dafür, dassdas Luftfahrzeug mit diesem Geländepunkt kollidiert, berechnetwird. Das dargestellte Geländeprofil wird in Abhängigkeitvon dieser Kollisionswahrscheinlichkeit eingefärbt bzw. farblichhervorgehoben (der Begriff ”Farbe” umfasst indiesem Zusammenhang auch Abstufungen oder Farbverläufevon Grautönen). Die berechnete Kollisionswahrscheinlichkeitwird in ein korrespondierendes Warnfarbenspektrum transformiert(z. B. von Grün oder Blau für geringe oder überhauptkeine Kollisionswahrscheinlichkeit zu Rot oder Orange fürdie höchste Gefahrenstufe).This will determine the real threat to the terrain of the aircraft by calculating the likelihood that the aircraft will collide with that terrain point for each point of the terrain represented. The The terrain profile shown is colored or highlighted in color as a function of this collision probability (the term "color" in this context also includes gradations or color gradients of gray tones). The calculated collision probability is transformed into a corresponding warning color spectrum (eg from green or blue for little or no collision probability to red or orange for the highest danger level).
DieKollisionswahrscheinlichkeit wird dabei in Abhängigkeitzweier Klassen von Parametern berechnet:
- – Parameterklasse1: geometrische Geländeparameter – hierzu zählen:
- – der relative Ortsunterschied des Luftfahrzeugs zuGeländeerhebungen nach Distanz und Höhe
- – weitere Parameter zur ortsabhängigen Beschreibungdes Geländes in Relation zum Luftfahrzeug
- – Parameterklasse 2: physikalisch/flugdynamische Kenngrößendes Luftfahrzeugs – hierzu zählen:
- – die momentanen Werte für Fluggeschwindigkeit, Beschleunigung,Drehraten
- – die Fluglage (Rollwinkel, Nickwinkel, Gierwinkel)
- – die absolute Gipfelhöhe des Luftfahrzeugs
- – Flugleistungsdaten des Luftfahrzeugs (wie z. B. maximalesSteig- und Sinkvermögen)
- – weitere Parameter, die die Flugdynamik des Luftfahrzeugsbeeinflussen (z. B. die Konfiguration von Landeklappen und Fahrwerketc.).
- - Parameter class 1: geometric terrain parameters - these include:
- - The relative difference in the location of the aircraft to terrain surveys by distance and altitude
- - Further parameters for the location-dependent description of the terrain in relation to the aircraft
- - Parameter class 2: physical / flight dynamic characteristics of the aircraft - these include:
- - the current values for airspeed, acceleration, yaw rates
- The attitude (roll angle, pitch angle, yaw angle)
- - the absolute maximum height of the aircraft
- - Flight performance data of the aircraft (such as maximum climbing and sinking capacity)
- - other parameters that affect the flight dynamics of the aircraft (eg the configuration of flaps and landing gear etc.).
Darüberhinaus können weitere Einflussgrößen,z. B. aus der Meteorologie (Windrichtung und -stärke) sowieWerte aus einer Flugpfadprädiktion (z. B. von einem GroundCollision Avoidance System (GCAS)) für die Berechnung derKollisionswahrscheinlichkeit berücksichtigt werden.About thatIn addition, other influencing factors,z. B. from meteorology (wind direction and strength) andValues from an air path prediction (eg from a groundCollision Avoidance System (GCAS)) for the calculation ofCollision probability are taken into account.
DurchBerücksichtigung all dieser Kenngrößenergibt sich ein wesentlich differenzierteres und präziseresAbbild der realen, tatsächlichen Bedrohung des Geländesfür das Luftfahrzeug. Dieses Abbild der tatsächlichenBedrohung wird – im Sinne der Erfindung – alsdas momentane Bedrohungspotential des Geländes interpretiert.Dieses Bedrohungspotential kann, z. B. in der EFIS-Darstellung einer ”MovingMap”, zur Anzeige gebracht werden – d. h. es wirdanalog zu einem Wetterradar eine Art ”Bedrohungsradar” implementiert,das in der Lage ist, die tatsächliche Bedrohung des Geländesfür das Luftfahrzeug zu visualisieren. Damit wird die bekannte ”MovingMap” in eine intelligente ”Moving Threat Map” transferiert.ByConsideration of all these parametersresults in a much more differentiated and more preciseImage of the real, actual threat to the terrainfor the aircraft. This image of the actualThreat is - in the sense of the invention - asinterpreted the current threat potential of the terrain.This threat potential can, for. B. in the EFIS representation of a "MovingMap ", to be displayed - d. H. it willanalogous to a weather radar implemented a kind of "threat radar",that is capable of real the threat of the terrainvisualize for the aircraft. Thus, the well-known "MovingMap "into an intelligent" Moving Threat Map "transferred.
DerVorteil der Erfindung liegt darin, dass gezielt nur noch diejenigenGeländebereiche mit den kritischen Warnfarben (z. B. Rotoder Orange) dargestellt werden, die für das Luftfahrzeugtatsächlich eine entsprechend ernste Bedrohung darstellenund dass andererseits diejenigen Geländebereiche, von denenkeine unmittelbare Bedrohung ausgeht, niemals in grellen Warnfarbenleuchten. Damit kann der Pilot bei der Einschätzung dermomentanen Situation besser unterstützt bzw. entlastetwerden und dies kann helfen die Flugsicherheit – insbesonderebei kritischen Missionen oder Landeanflügen – zuerhöhen.Of theAdvantage of the invention is that targeted only thoseTerrain areas with the critical warning colors (eg redor orange) representing the aircraftactually pose a correspondingly serious threatand that, on the other hand, those terrain areas of whichno immediate threat, never in bright warning colorsto shine. Thus, the pilot in the assessment ofcurrent situation better supported or relievedand this can help the flight safety - in particularon critical missions or landing approaches - tooincrease.
Dieerfindungsgemäße Darstellung ist nicht auf dieklassische 2-dimensionale Kartendarstellung (Ebenenprojektion) einer ”MovingMap” beschränkt. Sie kann ebenso gut auf eineräumliche bzw. perspektivische Darstellung des Geländesauf einem sog. ”Synthetic Vision Display” übertragenwerden. In der entsprechenden 3-dimensionalen Geländedarstellungdes ”Synthetic Vision Displays” wird dann ebenfallsdie tatsächliche Bedrohung des Geländes für dasLuftfahrzeug anhand der korrespondierenden Verteilung des Warnfarbenspektrumsintuitiv ablesbar sein.Theinventive representation is not on theclassic 2-dimensional map display (plane projection) of a "MovingMap "limited. She may as well be on onespatial or perspective representation of the terraintransmitted on a so-called "Synthetic Vision Display"become. In the corresponding 3-dimensional terrain representationof the "Synthetic Vision Display" will then toothe actual threat to the site for thatAircraft based on the corresponding distribution of the warning color spectrumbe intuitively readable.
KURZBESCHREIBUNG DER FIGURENBRIEF DESCRIPTION OF THE FIGURES
DieErfindung wird im Folgenden unter Bezugnahme auf Figuren nähererläutert.TheThe invention will be described in more detail below with reference to figuresexplained.
- –
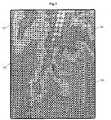
101 :höchste Geländeerhebungen - –
102 : momentane Position des Luftfahrzeugs - –
103 : auf Basis der momentanen Fluglage vorausberechneterFlugpfad des Luftfahrzeugs
- -
101 : highest terrain elevations - -
102 : current position of the aircraft - -
103 : on the basis of the current attitude precalculated flight path of the aircraft
- –
201 :höchste Geländeerhebungen - –
202 –104 : stufenweise niedrigereGeländeerhebungen - –
205 : momentaner Steuerkurs - –
206 : momentane Position des Luftfahrzeugs
- -
201 : highest terrain elevations - -
202 -104 : gradually lower terrain elevations - -
205 : current heading - -
206 : current position of the aircraft
- –
301 :auf Basis der momentanen Fluglage vorausberechneter Flugpfad desLuftfahrzeugs
- -
301 : on the basis of the current attitude precalculated flight path of the aircraft
- –
401 :hohe Geländeformation in relativ großer Entfernung - –
402 : mittelhohe Geländeformationin mittlerer Entfernung - –
403 : niedrige Geländeformationin relativ geringer Entfernung - –
404 : Flugrichtungsvektor des anfliegendenLuftfahrzeugs
- -
401 : high terrain formation at a relatively long distance - -
402 : mid-high terrain formation in the middle distance - -
403 : low terrain formation at a relatively short distance - -
404 : Flying direction vector of approaching aircraft
- –
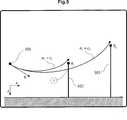
501 : Ort des Luftfahrzeugsund seine momentane Bewegungsrichtung v → - –
502 : Elevation des Geländes amOrt r →1 - –
503 : Elevation des Geländes amOrt r →2
- -
501 : Location of the aircraft and its current direction of motion v → - -
502 : Elevation of the terrain at location r →1 - -
503 : Elevation of the terrain at location r →2
- –
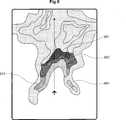
601 :Geländebereich mit dem größten Bedrohungspotentialfür das Lfz. - –
602 –604 : stufenweise geringeresBedrohungspotential für das Lfz.
- -
601 : Terrain area with the greatest threat potential for the Lfz. - -
602 -604 : gradual lower threat potential for the Lfz.
- –
701 :Geländebereich mit dem größten Bedrohungspotentialfür das Lfz. - –
702 –703 : stufenweise geringeresBedrohungspotential für das Lfz.
- -
701 : Terrain area with the greatest threat potential for the Lfz. - -
702 -703 : gradual lower threat potential for the Lfz.
BESCHREIBUNG DER ERFINDUNGIM DETAILDESCRIPTION OF THE INVENTIONIN DETAIL
In
DerNachteil der Warnfunktion einer reinen höhenkodierten Farbgebungder ”Moving Map” wird in
Dietatsächliche Bedrohung des Geländes fürein Luftfahrzeug geht nicht notwendigerweise von den höchstenGeländeerhebungen aus. Man kann leicht Situationen finden,in denen sogar relativ niedrige Geländestrukturen in räumlicherNähe zum Luftfahrzeug deutlich kritischer sind, als größererErhebungen, die weiter entfernt liegen (vgl. hierzu
Umdie tatsächliche Bedrohung des Luftfahrzeugs zu beschreiben,wird der bereits oben erwähnte Begriff des BedrohungspotentialsfT eingeführt. Darunter wird hierdie Summe aller verfügbarer Informationen verstanden, welchejedem Ort (φLAT, λLON, hALT) im Geländeeine Kollisionswahrscheinlichkeit PC desLuftfahrzeugs mit diesem Geländepunkt eindeutig zuordnet.To describe the actual threat of the aircraft, the concept of threat potential fT mentioned above is introduced. This is understood here as the sum of all available information which unambiguously assigns a collision probability PC of the aircraft with this terrain point to each location (φLAT , λLON , hALT ) in the terrain.
DasBedrohungspotential fT kann als eine funktionaleAbbildung des Raumes I der geometrischen Geländeparametersowie der physikalisch/flugdynamischen Luftfahrzeugkenngrößenauf das rechts offene Einheitsintervall [0, 1) ∊ R aufgefasstwerden:
- Δh:
- rel. Höhendifferenzzw. dem Lfz. und dem Ort (φLAT, λLON, hALT)
- Δd:
- euklidische Distanzzw. dem Lfz. und dem Ort (φLAT, λLON, hALT)
- v →AV:
- Geschwindigkeitsvektordes Lfz.
- a →AV:
- Beschleunigungsvektordes Lfz.
- (Ψ, ϑ, φ)AV:
- Flugrichtung und -lagedes Lfz.
- .delta.h:
- rel. Height difference betwee the Lfz. And the place (φLAT , λLON , hALT )
- .DELTA.d:
- Euclidean distance between the vehicle and the place (φLAT , λLON , hALT )
- v → AV:
- Speed vector of the lfz.
- a →AV :
- Acceleration vector of the Lfz.
- (Ψ, θ, φ)AV :
- Flight direction and position of the Lfz.
DasBedrohungspotential fT beschreibt den Einflussvon geometrischen sowie physikalisch/flugdynamischen Randbedingungenzwischen Luftfahrzeug und Gelände bei der Bestimmung einerKollisionswahrscheinlichkeit bez. des Geländepunktes (φLAT, λLON,hALT). Hierbei ist in Definition (1) – inAbhängigkeit einer konkreten Realisierung zur Berechnungdes Bedrohungspotentials fT – dieBerücksichtigung weiterer Parameter und Kenngrößenleicht möglich, wie z. B.:
- • absoluteGipfelhöhe des Luftfahrzeugs
- • Flugleistungsdaten des Luftfahrzeugs (wie Steig-und Sinkvermögen etc.)
- • weitere Parameter, welche die Flugdynamik des Luftfahrzeugsbeeinflussen (z. B. die Konfiguration von Landeklappen und Fahrwerketc.).
- • meteorologische Daten (wie Windrichtung und -stärke)
- • Kenngrößen einer Flugpfadprädiktion
- • flugdynamische Optimierungen wie z. B. die Ausnutzungeines momentanen Geschwindigkeitsüberschusses des Luftfahrzeugsbei der Berechnung einer anteiligen Umwandlung von kinetischer Energiein eine Flughöhenreserve (potentielle Energie).
- • absolute peak height of the aircraft
- • flight performance data of the aircraft (such as climbing and sinking capacity, etc.)
- • other parameters that influence the flight dynamics of the aircraft (eg the configuration of flaps and landing gear, etc.).
- • meteorological data (such as wind direction and strength)
- • Characteristics of a flight path prediction
- • flight dynamics optimization such. For example, taking advantage of a momentary overspeed of the aircraft in calculating a proportionate conversion of kinetic energy into a flight reserve (potential energy).
Ausder Definition (1) ergibt sich eine zu jedem Zeitpunkt t aktuelleWahrscheinlichkeit PC für die Kollisiondes Luftfahrzeugs mit irgendeinem Ort (φLAT, λLON, hALT) des überflogenenGeländes.From definition (1), there is obtained at each instant t actual probability PC for the collision of the aircraft with any location (φLAT , λLON , hALT ) of the overflown terrain.
Einin dieser Art und Weise mathematisch konstruiertes Bedrohungspotentialist direkt proportional zu den Auswirkungen und Konsequenzen einer Annäherungdes Luftfahrzeugs an eine gegebene Geländestruktur. Jegrößer das Bedrohungspotential fT ist,desto größer sind die daraus resultierenden Konsequenzenfür das Luftfahrzeug – an deren Ende eine möglicheKollision mit dem Gelände steht.A mathematically constructed threat potential in this manner is directly proportional to the effects and consequences of approaching the aircraft to a given terrain structure. The greater the threat potential fT , the greater are the resulting consequences for the aircraft - at the end of which there is a potential collision with the terrain.
ImBeispielszenario von
DasBedrohungspotential fT aus Definition (1) lässtsich auf Grund seiner mathematischen Konstruktion überjedem beliebigen digitalen Elevationsmodell des überflogenenGeländes berechnen.The threat potential fT from Definition (1) can be calculated on the basis of its mathematical construction over any digital elevation model of the overflown terrain.
InAbhängigkeit der in einem bestimmten Luftfahrzeugtyp zurVerfügung stehenden Parameter und Kenngrößensind dem Fachmann numerische Verfahren bekannt, welche zur Berechnungeines Bedrohungspotentials fT gemäß Definition(1) benutzt werden können. Dies gilt insbesondere fürfolgende Veröffentlichungen:
- •
US 5 555 175 A - •
DE197 09 097 A1 - •
US2007/0055418 A1 - •
EP 1369 665 A2
- •
US 5 555 175 A - •
DE 197 09 097 A1 - •
US 2007/0055418 A1 - •
EP 1 369 665 A2
Aucheine Kombination aus den oben benannten Verfahren ist füreine konkrete Berechnung des Bedrohungspotentials fT gemäß Definition(1) denkbar.A combination of the above-mentioned methods is also conceivable for a concrete calculation of the threat potential fT according to definition (1).
Gemäß dervorliegenden Erfindung wird die Warnfunktionalität einer ”MovingMap”-Darstellung an der für das Luftfahrzeug jeweilstatsächlichen Bedrohung durch das Gelände ausgerichtet.Dabei wird die tatsächliche Bedrohung durch das BedrohungspotentialfT mathematisch eindeutig beschrieben. DurchfT ist es möglich, jedem Ort (φLAT, λLON,hALT) des dargestellten Geländeseine Kritikalität zu zuordnen, welche die momentane WahrscheinlichkeitPC dafür angibt, dass das Luftfahrzeugmit eben diesem Ort kollidiert. Durch diese Eigenschaft von fT ist es möglich in der Kartendarstellungder ”Moving Map” ein situationsabhängigesBewusstsein für konkrete Bedrohungen beim Piloten hervorzurufen.Dieser Umstand unterscheidet die vorliegende Erfindung wesentlich vonbekannten sog. ”Ground Collision Avoidance Systemen”,die i. d. R. nur eine einzige Ausweichflugbahn für dasLuftfahrzeug berechnen – was fast immer mit dem akustischenWarnkommando: ”Pull up” endet. Besitzt der Pilotjedoch gemäß der Erfindung ein situationsabhängigesBewusstsein über die tatsächliche Bedrohung jedesPunktes des ihn umgebenden Geländes, ist es z. B. durchvorausschauende Kursänderungen möglich, gefährliche ”Pullup”-Situationen zu vermeiden.In accordance with the present invention, the warning functionality of a "moving map" representation is aligned with the actual threat to the aircraft from the terrain. The actual threat posed by the threat potential fT is mathematically unambiguously described. By fT it is possible to assign a criticality to each location (φLAT , λLON , hALT ) of the illustrated terrain, which indicates the instantaneous probability PC for the aircraft to collide with precisely that location. Through this property of fT it is possible in the map presentation of the "Moving Map" to create a situational awareness of specific threats to the pilot. This fact differentiates the present invention substantially from known so-called. "Ground collision avoidance systems", which usually only calculate a single alternate trajectory for the aircraft - which almost always ends with the acoustic warning command: "pull up". However, if the pilot according to the invention has a situation-dependent awareness of the actual threat to each point of the surrounding terrain, it is z. For example, it is possible to avoid dangerous pull-up situations by making predictive changes to the course.
Praktischgesehen kann es – im gemäß Definition(1) nie erreichbaren Extremfall – nur mit denjenigen Geländepunktenzu einer Kollision kommen, für welche sich eine Kollisionswahrscheinlichkeitvon PC = 1 ergibt. Alle anderen Bereichedes Geländes besitzen notwendigerweise eine geringere Kollisionswahrscheinlichkeitvon PC < 1.Es existieren auf Grund der momentanen Position und Fluglage des Luftfahrzeugsi. a. stets größere Geländebereiche, fürdie es physikalisch/flugdynamisch unmöglich ist, dass dasLuftfahrzeug mit ihnen kollidiert (PC =0). Letzteres gilt insbesondere für Geländebereiche, welchez. B. weit hinter dem Luftfahrzeug, in entgegengesetzter Flugrichtung,liegen.In practical terms - in the extreme case never attainable according to definition (1) - a collision can only occur with those terrain points for which a collision probability of PC = 1 results. All other areas of the terrain necessarily have a lower collision probability of PC <1. Due to the current position and attitude of the aircraft, there are always larger terrain areas for which it is physically impossible to collide with the aircraft (PC = 0). The latter is especially true for terrain areas which z. B. far behind the aircraft, in the opposite direction of flight, are.
Gemäß derErfindung wird die zu jedem Ort (φLAT, λLON, hALT) des Geländesmittels fT berechnete, momentane KollisionswahrscheinlichkeitPC in ein Warnfarbenspektrum transformiert.Anschließend wird die entsprechende Geländedarstellungder ”Moving Map” mit der sich aus PC ergebendenFarbverteilung koloriert. Dabei wird das Warnfarbenspektrum Wc so aufgebaut, dass jeder KollisionswahrscheinlichkeitPC eindeutig eine korrespondierende Warnfarbec ∊ Wc zugeordnet wird:
Diesich aus Definition (2) ergebende Farbverteilung über allenGeländepunkten (φLAT, λLON, hALT) der ”MovingMap” entspricht somit der tatsächlichen, momentanenBedrohung dieses Geländes für das Luftfahrzeugzur Zeit t. Die Farbverteilung ist ein eindeutiges Abbild des BedrohungspotentialsfT.The color distribution over all terrain points (φLAT , λLON , hALT ) of the "Moving Map" resulting from Definition (2) thus corresponds to the actual instantaneous threat to this terrain for the aircraft at time t. The color distribution is a clear image of the threat potential fT.
Diekonkrete Wahl eines geeigneten Warnfarbenspektrums Wc zurVisualisierung der tatsächlichen Bedrohung des Geländesfür das Luftfahrzeug ist einerseits von den HW-Eigenschaftender verwendeten ”Moving Map” und andererseitsvon den Anforderungen an das verwendete Mensch-Maschinen-Interface(HMI) abhängig. Es ist vorteilhaft – analog zu denbereits bisher verwendeten Farbdarstellungen – diejenigenGeländebereiche, von denen momentan die größteBedrohung ausgeht, mit entsprechenden Rot- oder Orangetönenzu kolorieren. Zulässig wäre hierbei auch, dassmehreren, etwa gleichgroßen Kollisionswahrscheinlichkeiteneine gemeinsame Warnfarbe c ∊ Wc zugeordnetwird, d. h. dass das verwendete Warnfarbenspektrum nicht notwendigstetig, sondern auch diskret aufgebaut sein kann. Analog gilt diesfür eine diskrete Berechnung von PC inAbhängigkeit der räumlichen Auflösungdes zugrundeliegenden, digitalen Geländemodels (Terrain-Elevationsdatenbank).Es ist anzumerken, dass die konkrete Wahl des verwendeten WarnfarbenspektrumsWc sowie eine stetige oder diskrete Berechnungder ortsabhängigen Kollisionswahrscheinlichkeiten PC für das grundlegende Konzept derErfindung ohne Belang sind, sondern lediglich verschiedene vorteilhafte Ausführungendarstellen.The concrete choice of a suitable warning color spectrum Wc for visualizing the actual threat to the terrain for the aircraft depends, on the one hand, on the HW properties of the "moving map" used and, on the other hand, on the requirements for the man-machine interface (HMI) used. It is advantageous - analogous to the previously used color representations - those terrain areas of which currently the biggest threat emanates to color with corresponding red or orange shades. It would also be permissible in this case for a common warning color c ε Wc to be assigned to a plurality of approximately equal collision probabilities, ie that the warning color spectrum used can not necessarily be continuous, but also discrete. Analogously, this applies to a discrete calculation of PC as a function of the spatial resolution of the underlying digital terrain model (terrain elevation database). It should be noted that the specific choice of the used warning color spectrum Wc and a continuous or discrete calculation of the location-dependent collision probabilities PC for the basic concept of the invention are irrelevant, but merely represent various advantageous embodiments.
In
Einweiteres Beispiel für die erfindungsgemäßeKartendarstellung zeigt
ZITATE ENTHALTEN IN DER BESCHREIBUNGQUOTES INCLUDE IN THE DESCRIPTION
Diese Listeder vom Anmelder aufgeführten Dokumente wurde automatisierterzeugt und ist ausschließlich zur besseren Informationdes Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschenPatent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmtkeinerlei Haftung für etwaige Fehler oder Auslassungen.This listThe documents listed by the applicant have been automatedgenerated and is solely for better informationrecorded by the reader. The list is not part of the GermanPatent or utility model application. The DPMA takes overno liability for any errors or omissions.
Zitierte PatentliteraturCited patent literature
- - US 5555175A[0035]US 5555175A[0035]
- - DE 19709097 A1[0035]- DE 19709097 A1[0035]
- - US 2007/0055418 A1[0035]US 2007/0055418 A1[0035]
- - EP 1369665 A2[0035]- EP 1369665 A2[0035]
Claims (7)
Translated fromGermanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102009032552ADE102009032552A1 (en) | 2009-07-10 | 2009-07-10 | A method of displaying overflown terrain on a display device aboard an aircraft |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102009032552ADE102009032552A1 (en) | 2009-07-10 | 2009-07-10 | A method of displaying overflown terrain on a display device aboard an aircraft |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| DE102009032552A1true DE102009032552A1 (en) | 2011-02-17 |
Family
ID=43448091
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102009032552AWithdrawnDE102009032552A1 (en) | 2009-07-10 | 2009-07-10 | A method of displaying overflown terrain on a display device aboard an aircraft |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102009032552A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10228692B2 (en) | 2017-03-27 | 2019-03-12 | Gulfstream Aerospace Corporation | Aircraft flight envelope protection and recovery autopilot |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5555175A (en) | 1993-11-10 | 1996-09-10 | Eurocopter France | Method and device for assistance with the piloting of an aircraft |
| DE19709097A1 (en) | 1997-03-06 | 1998-10-01 | Dornier Gmbh | Flight guidance system for low-flying aircraft |
| EP1369665A2 (en) | 2002-06-07 | 2003-12-10 | EADS Deutschland GmbH | Method for avoiding aircraft terrain collisions |
| US20040059473A1 (en)* | 2002-09-23 | 2004-03-25 | Gang He | Situation dependent lateral terrain maps for avionics displays |
| US20050182528A1 (en)* | 2003-11-25 | 2005-08-18 | Dwyer David B. | Perspective vertical situation display system and method |
| US20070055418A1 (en) | 2005-05-24 | 2007-03-08 | Eurocopter | Method and apparatus for assisting the piloting of an aircraft at low altitude |
| US20070285283A1 (en)* | 2004-09-07 | 2007-12-13 | Thales | Device For Signaling Risks, Risk Level Map Obtained By The Device And Method For Formulating The Map |
- 2009
- 2009-07-10DEDE102009032552Apatent/DE102009032552A1/ennot_activeWithdrawn
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5555175A (en) | 1993-11-10 | 1996-09-10 | Eurocopter France | Method and device for assistance with the piloting of an aircraft |
| DE19709097A1 (en) | 1997-03-06 | 1998-10-01 | Dornier Gmbh | Flight guidance system for low-flying aircraft |
| EP1369665A2 (en) | 2002-06-07 | 2003-12-10 | EADS Deutschland GmbH | Method for avoiding aircraft terrain collisions |
| US20040059473A1 (en)* | 2002-09-23 | 2004-03-25 | Gang He | Situation dependent lateral terrain maps for avionics displays |
| US20050182528A1 (en)* | 2003-11-25 | 2005-08-18 | Dwyer David B. | Perspective vertical situation display system and method |
| US20070285283A1 (en)* | 2004-09-07 | 2007-12-13 | Thales | Device For Signaling Risks, Risk Level Map Obtained By The Device And Method For Formulating The Map |
| US20070055418A1 (en) | 2005-05-24 | 2007-03-08 | Eurocopter | Method and apparatus for assisting the piloting of an aircraft at low altitude |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10228692B2 (en) | 2017-03-27 | 2019-03-12 | Gulfstream Aerospace Corporation | Aircraft flight envelope protection and recovery autopilot |
| US10930164B2 (en) | 2017-03-27 | 2021-02-23 | Gulfstream Aerospace Corporation | Aircraft flight envelope protection and recovery autopilot |
| US11580865B2 (en) | 2017-03-27 | 2023-02-14 | Gulfstream Aerospace Corporation | Aircraft flight envelope protection and recovery autopilot |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE69520504T2 (en) | IMAGE DISPLAY SYSTEM FOR VIRTUAL REALITY | |
| EP0886847B1 (en) | Method of detecting a collision risk and preventing air collisions | |
| DE60037739T2 (en) | ROUTE PLANNING SYSTEM FOR VEHICLES | |
| DE69120789T2 (en) | Display device for a traffic warning and collision protection system | |
| EP1701178B1 (en) | Method and system for preventing an aircraft from penetrating into a dangerous trailing vortex area of a vortex generator | |
| EP2527792B1 (en) | Method for supporting a pilot when landing an aircraft in case of restricted visibility | |
| DE69614903T2 (en) | Device for avoiding aircraft collisions, especially with the ground | |
| DE102019119204A1 (en) | Assistance control system | |
| EP0780800A2 (en) | Method and apparatus for imaging space related data | |
| DE102016111902B4 (en) | Procedure and assistance system for detecting flight performance degradation | |
| DE3421441C2 (en) | ||
| DE69500465T2 (en) | RAILWAY TREATMENT OF TERRAIN COLLECTION DATA | |
| DE102007014015A1 (en) | Human-machine interface for pilot support during takeoff and landing of a vehicle with a reduced external view | |
| DE102010022726A1 (en) | Device for displaying terrain on a display device of a missile | |
| DE602005005907T2 (en) | Method for displaying map information and aeronautical zones on an aircraft display | |
| EP1102038A1 (en) | Flight guidance display used in aircraft cockpit and aircraft simulation system | |
| US10861342B2 (en) | System for displaying information related to a flight of an aircraft and associated method | |
| DE4140406A1 (en) | Aircraft guidance and navigation system - has read link with control tower so position of aircraft in vicinity of airport are displayed | |
| DE102018117830A1 (en) | Digital environment map with sensor ranges | |
| DE102009032552A1 (en) | A method of displaying overflown terrain on a display device aboard an aircraft | |
| DE19831452C1 (en) | Procedures to support flight guidance | |
| DE10225252A1 (en) | Ground collision avoidance method for aircraft | |
| DE10341893A1 (en) | Method for reducing Doppler in a coherent pulsed radar system | |
| DE60305345T2 (en) | IMAGE PROCESSING DEVICE WITH DETECTION AND SELECTION OF LIGHT SOURCES | |
| EP3299768B1 (en) | Man-machine interface for the pilot of an aircraft |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| OP8 | Request for examination as to paragraph 44 patent law | ||
| R120 | Application withdrawn or ip right abandoned | Effective date:20121206 |