CN85105567A - Laser beam welding device - Google Patents
Laser beam welding deviceDownload PDFInfo
- Publication number
- CN85105567A CN85105567ACN 85105567CN85105567ACN85105567ACN 85105567 ACN85105567 ACN 85105567ACN 85105567CN85105567CN 85105567CN 85105567 ACN85105567 ACN 85105567ACN 85105567 ACN85105567 ACN 85105567A
- Authority
- CN
- China
- Prior art keywords
- mentioned
- conduit
- sealing
- box
- opening
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/12—Working by laser beam, e.g. welding, cutting or boring in a special atmosphere, e.g. in an enclosure
- B23K26/127—Working by laser beam, e.g. welding, cutting or boring in a special atmosphere, e.g. in an enclosure in an enclosure
- B23K26/128—Laser beam path enclosures
Landscapes
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Plasma & Fusion (AREA)
- Mechanical Engineering (AREA)
- Laser Beam Processing (AREA)
Abstract
Translated fromChineseDescription
Translated fromChinese本发明一般涉及采用能产生外来粒子物质的光束加工工件的装置。更确切地说,本发明与收集和清除在加工操作过程中作为不希望有的付产品而出现的粒子物质的装置有关。The present invention relates generally to apparatus for machining workpieces using beams capable of generating foreign particulate matter. More specifically, the present invention relates to means for collecting and removing particulate matter that occurs as an undesirable by-product during processing operations.
通常,使用一束光,例如激光束,的加工操作是在放有待加工工件的箱内维持有保护性气体气氛中进行的。在加工箱中的保护性气氛通常都维持于整个加工操作过程中,方法是通过把一种非活性或惰性气体,例如氩气,在箱的底部连续地引入箱内,并当新气体进入时可使气体从箱的顶部逃逸出去,从加工箱中逃逸的气体可以进入一个压力通风系统并从此系统中排放出去。通过并从加工箱中射出的惰性气体将携带在箱中产生的粒子物质,虽然粒子物质仅以一个相对低的速率产生,但是搀杂在气流中的大多数粒子物质将沿气体流动轨迹的不同点沉积,并逐渐积累,形成沉淀。且不说粒子物质散布在装置内各个不同位置上不便于清洗,如果所产生的粒子物质是自燃的,例如就象在激光焊接用于核燃料系统中的锆合金(Zircaloy)格栅时所产生的粒子和细屑那样,那么这些粒子积累还意味着相当大的危险。Usually, machining operations using a beam of light, such as a laser beam, are carried out in a box in which the workpiece is placed to maintain a protective gas atmosphere. A protective atmosphere in a processing chamber is usually maintained throughout the processing operation by continuously introducing a non-reactive or inert gas, such as argon, into the chamber at the bottom of the chamber and The gas is allowed to escape through the top of the box, and the gas escaping from the process box can enter a plenum and be exhausted from the system. The inert gas passing through and ejected from the process box will carry the particulate matter produced in the box. Although the particulate matter is only produced at a relatively low rate, most of the particulate matter mixed in the gas flow will follow different points along the gas flow trajectory. Deposits and gradually accumulates to form precipitates. Not to mention that particulate matter is scattered in various places in the device and is not easy to clean. If the particulate matter generated is spontaneously combustible, such as is generated during laser welding of zirconium alloy (Zircaloy) grids used in nuclear fuel systems particles and fines, then the accumulation of these particles also represents a considerable danger.
本发明主要旨在减轻上述问题,因此本发明属于采用可产生外来粒子物质的光束加工工件的装置,该装置包括一个用于安放待加工工件的加工箱,还包括用于把一种非活性气体引入加工箱中以便在每次加工操作中使箱内保持一个适当加工环境的装置,上述加工箱具有一个允许非活性气体从箱中排出的开口,其特征是:上述加工箱与包括具有进气装置的一个导管的粒子收集和清除装置有关,此外还与密封装置有关,这些密封装置可呈无效状态,允许非活性气体通过上述开口从加工箱中自由逃逸,还可呈有效状态,即密封加工箱的上述开口与导管的上述进气装置保持流体流动联系,强迫非活性气体和搀杂在其中的粒子物质从加工箱中流出,完全进入上述的导管。The present invention is mainly aimed at alleviating the above-mentioned problems, and therefore the present invention pertains to an apparatus for processing workpieces using a beam capable of generating foreign particulate matter, the apparatus comprising a processing box for housing the workpiece to be processed, and also comprising a device for injecting a non-reactive gas Means for introduction into a processing cabinet to maintain a suitable processing environment within the cabinet during each processing operation, said processing cabinet having an opening to allow inert gas to escape from the cabinet, characterized in that said processing cabinet is combined with a gas inlet Particle collection and removal means of one of the ducts of the device, in addition to the sealing means, which can be inactive, allowing the free escape of inert gas from the process box through the above-mentioned opening, or in an active state, i.e. sealing the process Said opening of the tank is in fluid flow communication with said inlet means of said conduit to force inert gas and particulate matter entrained therein out of the processing tank and completely into said conduit.
这种安排把射出的气体送入一条即定轨迹,这个轨迹中有收集和易于清除搀杂在气体中的粒子物质的装置。然而这种安排只是在密封装置呈有效状态时才起作用。密封装置启动前,允许从加工箱的开口离去的气体自由溢出,当不产生粒子物质时,正如所期望的那样,在把工件装入箱中和加工此工件之间的间隙,净化箱中的空气和排除湿气。此外,处于无效状态的密封装置将不影响加工箱在其装料和工作位置之间运动。This arrangement directs the ejected gas into a defined trajectory in which there are means for collecting and easily removing particulate matter entrained in the gas. However, this arrangement only works when the seal is active. Before the sealing device is activated, the gas exiting the opening of the processing box is allowed to escape freely. When no particulate matter is generated, as expected, in the gap between loading a workpiece in the box and processing this workpiece, the purge box air and remove moisture. Furthermore, an inactive seal will not interfere with the movement of the process box between its loading and operating positions.
导管最好由可拆卸地连结在一起的分离段组成,当它们彼此分开时,使导管的内部通路易于清洗;粒子收集和清除装置包括一个连接在用于接收携带粒子物质的非活性气体的导管上的粒子清除系统,上述粒子清除系统包括用于把粒子物质从非活性气体中分离出来的装置。粒子清除系统通过可分的耦接装置与导管的上述插口装置相连接,而导管是可取下的并且与闭锁装置有关,该闭锁装置可在锁定和解脱位置工作,以分别把导管锁定在工作位置,或为取下导管而将其解脱。用于把粒子清除系统耦接到导管上并可与其脱距耦接的装置和与导管相联系的闭锁装置最好联动以同时操作。The conduit preferably consists of separate sections detachably joined together to allow easy cleaning of the internal passages of the conduit when they are separated from each other; the particle collection and removal device comprises a conduit connected to receive an inert gas carrying particulate matter A particle removal system above, said particle removal system including means for separating particulate matter from an inert gas. The particle removal system is connected by means of a separable coupling to the above-mentioned socket means of the catheter, which is removable and associated with a locking device operable in locked and disengaged positions to respectively lock the catheter in the working position , or free it for catheter removal. The means for coupling and decoupling the particle removal system to the conduit and the lockout means associated with the conduit are preferably linked for simultaneous operation.
在本文后面将要详细说明的优选的实施例中,密封装置包括一个放在加工箱和上述开口的上面并与其有一个很小间隔的密封板,一个由加工箱所支撑、沿上述开口伸展并位于上述密封板下方的密封部件,和可用来推动上述密封部件进入与上述的密封板的下表面密封咬合的密封启动装置。导管安装在密封板中形成的开口内而且适宜让加工光束射入,导管通常是环状结构并确定了一个贯穿通过导管的开口,此开口基本上与在密封板中的上述开口共轴调准。In the preferred embodiment that will be described in detail later in this text, the sealing device includes a sealing plate placed on the processing box and the above-mentioned opening with a small gap therebetween, and a sealing plate supported by the processing box, extending along the above-mentioned opening and located at A sealing member below the sealing plate, and a seal activation device for pushing the sealing member into sealing engagement with the lower surface of the sealing plate. The conduit is mounted in an opening formed in the sealing plate and is adapted to allow the processing beam to enter, the conduit is generally annular and defines an opening through the conduit substantially coaxially aligned with said opening in the sealing plate .
现在仅通过举例的方式说明本发明优选的实施例,请参考附图,其中:The preferred embodiment of the present invention is now described by way of example only, please refer to the accompanying drawings, in which:
图1是一个核燃料系统的透视图;Figure 1 is a perspective view of a nuclear fuel system;
图2A、2B和2C分别是所示燃料系统的格栅构成部分的透视图、平面图和剖面图;Figures 2A, 2B and 2C are perspective, plan and cross-sectional views, respectively, of a grid component of the illustrated fuel system;
图3是一个激光加工系统的透视简图,此系统用于引导来自一个单一激光源的激光束交替射在两个诸如在图2A、2B和2C所示种类的格栅那样的工件上;Fig. 3 is a schematic perspective view of a laser processing system for directing a laser beam from a single laser source to alternately impinge on two workpieces such as grids of the type shown in Figs. 2A, 2B and 2C;
图4是一个含有图3所示系统并包括体现本发明的粒子收集和清除系统的激光焊接装置的透射图;Figure 4 is a perspective view of a laser welding apparatus incorporating the system shown in Figure 3 and including a particle collection and removal system embodying the present invention;
图5和图6分别是粒子收集和清除系统的平面图和侧视图;Figures 5 and 6 are plan and side views, respectively, of the particle collection and removal system;
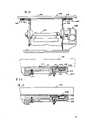
图7是导管闭锁系统和构成粒子收集和清除系统一部分的气体收集导管的平面图;Figure 7 is a plan view of the duct lockout system and the gas collection duct forming part of the particle collection and removal system;
图8是沿图7的线8-8截取的导管闭锁系统的侧视、剖面图;Figure 8 is a side, cross-sectional view of the catheter lockout system taken along line 8-8 of Figure 7;
图9是沿图8的线9-9截取的导管闭锁系统和气体收集导管的俯视、剖面图;Figure 9 is a top, cross-sectional view of the conduit lockout system and gas collection conduit taken along line 9-9 of Figure 8;
图10是沿图8的线10-10截取的气体收集导管的俯视、剖面图;Figure 10 is a top, cross-sectional view of the gas collection conduit taken along line 10-10 of Figure 8;
图11是沿图7的线11-11截取的导管闭锁系统的侧视、部分剖面图;Figure 11 is a side, partial cross-sectional view of the catheter lockout system taken along line 11-11 of Figure 7;
图12是沿图7的线12-12截取的导管闭锁系统的部分剖面图;Figure 12 is a partial cross-sectional view of the catheter lockout system taken along line 12-12 of Figure 7;
图13是沿图4的线13-13截取的激光焊接装置的焊接箱的侧视、部分剖面图;Fig. 13 is a side view, partial cross-sectional view of the welding box of the laser welding apparatus taken along line 13-13 of Fig. 4;
图14和图15是具有一块密封板的箱密封系统的剖面侧视图,分别示出密封垫处于密封位置和非密封位置。Figures 14 and 15 are cross-sectional side views of a tank sealing system having a sealing plate, showing the gasket in sealing and non-sealing positions, respectively.
现在首先参考图1,在此说明的并且通常用参考数字10表示的核燃料系统是一个独立单元,它包括顶端喷嘴12,底端喷嘴14,在喷嘴12和14之间纵横排列的核燃料棒18的方阵,横向支撑燃料棒并彼此平行间隔开的燃料棒格栅16,以及在核燃料棒18的方阵内选定位置上的控制棒(未标出)。喷嘴12和14,燃料棒格栅16和控制棒导向套管(未标出)形成支撑燃料棒18和控制棒的框架。Referring first now to FIG. 1, the nuclear fuel system illustrated herein and generally indicated by
体现本发明的精密激光焊接装置特别适用于制造如在图2A到2C中所示格栅16那样的燃料棒格栅。正如平面图所示,燃料棒格栅16近似一个正方形结构,它的周边是四片端部通过角缝焊接30连在一起的外格栅片22。大量内格栅片20形成一个有确定格子的鸡旦箱状结构,这些格子供燃料棒18和控制棒导向套管贯穿通过。相互交叉的内格栅片20具有在交叉点,例如在24,形成的余缝,使交叉的内格栅片20相咬合,在每个交叉点24完成的交叉焊接32又使内格栅片相互连接。每个内格栅片20在其各端部都有一对翼片26,它们被安装在外格栅片22形成的相应槽28中,并通过沿上、下排翼片26和槽28完成的槽和翼片焊接34加以固定。用于控制棒导向套管(未示出)的套筒36安放在格栅16的一个表面上,每个套筒36都安置在内格栅片20的边缘部分形成的凹槽38中,并通过切口线焊接40固定在内格栅片上。体现本发明的激光焊接装置适宜执行一系列控制焊接操作以完成焊接30、32、34和40。The precision laser welding apparatus embodying the present invention is particularly useful in the manufacture of fuel rod grids such as the
如图2B和2C所示,在内格栅片20上有很多弹性销44和间隔销46,它们凸出在各个格栅格子上,对贯穿其中的核燃料棒18提供横向支撑,正如人们在这个技术领域中所知道的那样。As shown in Figures 2B and 2C, there are a lot of
排定各种焊接操作程序的具体方式并不属于本发明的范畴,所以将不在此作进一步的说明。只要知道在每次这种焊接操作后,所焊接的燃料棒格栅被重新定位和/或者激光束的焦点依据下次所要进行的具体类型的焊接而变化就足够了。The specific way of scheduling various welding operation programs does not belong to the scope of the present invention, so no further description will be given here. It is sufficient to know that after each such welding operation, the fuel rod grid being welded is repositioned and/or the focus of the laser beam is changed depending on the specific type of welding to be performed next time.
在这里,本发明申请的焊接装置可以使用一个诸如图3简要说明的激光系统,通常用参考数字102表示。激光系统102连续发射一束可控能量的激光169,并精确地定位每个工件,即格栅16,並控制释放适量的惰性气体,如氩气,进入一对在其中进行激光焊接的焊接箱108a和108b中。每个工件通过与焊接箱108a和108b其中之一有关的定位舱106a或106b(见图4)被依次移动到它的各个焊接位置,焊接箱108a和108b用于安放工件和建立一个环境,即一种惰性气体的气氛,从而能在其中进行激光焊接。Here, the welding apparatus of the present application may use a laser system such as that schematically illustrated in FIG. 3, generally indicated by
激光系统102可以采用雷桑(Raytheon)制造的型号SS500的那种类型。它包括一个由掺钕钇铝石榴石晶体(Nd:YAG)激光构成的激光棒170和一对安装在高效率激光头中的直线氪(Krypton)闪光灯186。激光头包括安装在激光棒170两端的全反射镜182和部分反射镜184。安装在激光棒170如全反射镜182之间的腔内光闸188可有选择地加以控制,以便依据完成激光焊接所需要的能量释放出可供选择数目的激光脉冲。激光头实现积木化结构,可使所有光学元件,包括激光棒170,激励灯186和反射镜182与184的更换即简单又互不干扰。闪光灯186及其端部接头实行全长水冷。灯触发通过激励腔体为激励灯186的并联脉冲作准备。
一个适当的趋动机构192可使放泄光闸190在第一位置(图中实线表示)和图中用虚线表示的第二位置之间移动,在第一位置上,当更换焊接箱108内的工件时,引导激光束169沿转向轨迹196传输并射到光束吸收器194上;在第二位置上,允许光束169通过扩束透镜系统198聚焦在光束导向装置上,此装置包括一个可移动光束转向反射镜172和一个固定反射镜174。当转向反射镜172位于阻断激光束169的位置时,光束沿轨迹178a转向到反射镜176a上,并且垂直向下射入激光聚焦透镜系统204,此系统把激光束169沿轨迹178a聚焦在焊接箱108a内的工件上,即燃料棒格栅16上。由聚焦透镜202和透镜支托管200构成的激光聚焦透镜系统204,可通过与此相联的Z轴激光系统222(见图4)直线定位。当转向反射镜172,例如通过一个直线电动马达(未标出),从它的激光阻断位置移动到非阻断位置时,激光束169射到固定反射镜174上,并且沿轨迹178b反射到一个反射镜176b上,反射镜176b引导光束射向焊接箱108b。A
如图4所示,激光系统102安装在相对定位舱106a和106b调准位置上的主框架122上,一经与激光系统102调准,就使两个定位舱相对主框架122和安装在其上的激光系统102固定位置。主框架122由一块顶板142和一块底板(未标出)组成,均焊接成矩型管的框架。顶板142被加工成平面,对安装在其上的系统部件提供一个参考表面。As shown in Figure 4, the
如图4所示,每个定位舱106a和106b中都装有一个滑动平台262,通过一对固定在滑动平台下表面、并可在轴台282上滑动的支撑轴278作直线运动,这样安排是使滑动平台262和位于其上的焊接箱108从有关的定位舱106中滑进滑出。每个焊接箱108都安装在一个X-Y平台241上,而每个X-Y平台241又安装在一个X-Y定位系统288上,以使焊接箱108最好是在一个计算机(未标出)的控制下,沿X轴和Y轴做增量移动。每个定位舱106又包括一个顶板156,它与有关的焊接箱108的间隔很近,并可做为一个密封板,就象本文后面将要说明的那样。As shown in Figure 4, a sliding platform 262 is housed in each of the positioning cabins 106a and 106b, and a pair of support shafts 278 fixed on the lower surface of the sliding platform and capable of sliding on the pillow block 282 make a linear motion. It is to make the sliding platform 262 and the
运动支架140用于相对主框架122的参考表面,更准确地说是相对焊接箱108a和108b内的工件,来定位激光系统102。含有激光棒170(见图3)的激光头罩166安装在一个机械加工平面度很好的光学加工平板168上,该平板上还安装有可移动的光束转向反射镜172(见图3)及其趋动器(未标出),以及由反射镜174、176a和176b构成的固定光束换向器。The
如上所述,每个焊接箱103可从与它有关的定位舱106中撤出以便从中拿走已经焊接完毕的燃料棒格栅16,并更换一个需要焊接的新格栅16。因此,图3和图4表明,箱108b的位置便于新的燃料棒格栅16放入,把格栅16安装于一个可转动的夹具242(见图3)上,尔后,滑动平台262与装在其上的焊接箱108一起再次移进定位舱106中。从图4可知,每个焊接箱108都有一个与密封板156的间隔较小的最上层凸缘。当激光焊接系统工作时,将惰性气体,例如氩气经可转动夹具242中的气口(未标出)和安装在焊接箱108底部的扩散板(未标出)引入焊接箱108内。在焊接箱108重新放入与其相关的定位舱106后,增加进入焊接箱108中的氩气流速率,以便通过在焊接箱上凸缘和密封板下表面之间形成的狭窄空间,净化焊接箱108中的空气和排除湿气。通过上述狭窄空间的氩气流归入作为排气压力通风系统和支撑座的主框架122上的一个大开口(未标出)。如图5和图6所示,输送管喷嘴329在由主框架122确定的压力通风系统内产生一个负压,因而使氩气通过过渡输送管328和排气管道258,从压力通风系统中排放到装有激光焊接装置的建筑物的外部。As mentioned above, each welding box 103 can be withdrawn from its associated
在安装格栅时进入焊接箱108中的空气和湿气得到净化和排除之前,氩气将以较高的速率连续流动。焊接箱108内放有连续监控箱内环境的一个湿度传感器和一个氧气检测器(未标出)。当湿度和氧气达到预定标准时,激光焊接即可开始,在焊接过程中,氩气被不间断地送入焊接箱108内,但流动速率较小。The argon gas will continue to flow at a relatively high rate until the air and moisture entering the
正如本文最初说明的那样,激光焊接使工件产生被清除的粒子物质,它们夹杂在惰性气体流中,还会沉积,形成沉淀。参考图4到图12,下面阐述依据本发明所提供的有关粒子收集和清除系统的一个优选的实施例。As originally stated in this article, laser welding produces particulate matter that is removed from the workpiece, entrained in the inert gas flow, and deposited, forming deposits. Referring to FIG. 4 to FIG. 12, a preferred embodiment of the particle collection and removal system provided by the present invention is described below.
从图4得知,粒子收集系统236包括一对压缩空气趋动的箱密封系统244a和244b,这两个系统分别通过密封支撑系统415a或415b安装在焊接箱108其中之一的开口附近。如下所述,每个箱密封系统244可在每次焊接操作期间密封有关的焊接箱108,使其进入与粒子收集和清除系统的流体流动交换状态。As seen in FIG. 4, the
启动箱密封系统244,使焊接箱108密封到粒子收集系统236上,尔后,氩气被引入箱中以维持箱内适宜的加工环境,并且收集和清除在焊接过程中产生的诸如锆合金(Zircaloy)细屑那样的粒子。氩气与掺杂在其中的锆合金细屑一起,通过各个焊接箱的上开口,从各个箱中排出,进入有关的气体收集导管240a或240b(见图8和图9),通过收集导管进入排气系统248,排气系统248包括成套的管道302、304和连接在导管254上的250、252,导管254与粒子清除系统256相耦接,清除系统用于接收掺有锆合金细屑的氩气,並把它们排放进一个盛放废物的系统。图5和图6表明,粒子清除系统256与排气管道258相耦接,氩气通过排气管道258,被排放到装有激光焊接系统的建筑物外面的大气中。与焊接箱108a和108b(见图4)相连的是透镜密封罩246a和246b,密封罩支配激光聚焦透镜系统204a和204b,並且构成相关的各气体收集导管240a和240b的外壳。气体收集导管240a和240b分别与导管闭锁系统260a或260b相连接,以便相对密封板156a或156b分别固定气体收集导管240a或240b,並且把有关的排气管302与304分别耦接到气体收集导管240a或240b上。The
如上所述,排气系统248可用于清除来自气体收集导管240a和240b的惰性气体以及掺杂在其中的锆合金细屑,而收集导管240a和240b分别与焊接箱108a和108b相联系,每个收集导管都通过两节刚性排气管302、304和两节软排气管250、252与导管254相耦接。刚性排气管302和304可与和它们有关的气体收集导管240脱离耦接,以便允许取下收集导管240并清洗锆合金细屑,而软排气管250和252可使刚性管302和304为此目的作直线移动。As noted above,
导管254与粒子清除系统256相耦接,以便使锆合金细屑或粒子从惰性气体中清除出去并排放进一个污物管或废物清除系统。导管254包括一个舌阀306,它能以一个铰链308为轴运动,从一个关闭位置,如图6中实线所示,移到一个开启位置,如图中虚线所示,并且舌阀306可以被一个适当的趋动机构310所启动。
携带锆合金细屑的氩气通过湿法洗涤器316,进入粒子清除系统256,如图6所示,湿法洗涤器包括一个与进水口312相连接的文氏喷嘴314,进入进水口312的水被喷成雾状用以“清洗”氩气。进气口导管320把氩气引入水阀过滤系统318内,这个过滤系统包括一连串细网过滤器,可提供洗去锆合金细屑的连续水流。湿法洗涤器316和水网过滤器318可以采用纽约法明代尔(Farmingdale)的Heat Systems,Ultrasonics公司制造的型号分别为HSM2RCMV和MYSTAIRE的产品。清除了锆合金细屑的氩气通过连接导管322和326,由排气喷嘴324吸入,并通过排气导管258排出。The argon gas carrying zirconium alloy fines passes through the
有时,从焊接箱中排出的氩气并未被迫进入有关的导管240,因为这种氩气比空气重,所以它将下沉并落入主框架122(图4)中的大开口(未标出),进入由框架所确定的排气压力通风系统。氩气从这个通风系统被通风道风箱329吸到与排气导管258相接的通风道328中。Sometimes the argon exhausted from the welding box is not forced into the associated
现在参考图7、图8和图9,对于气体收集导管240和耦接管302与304来说,导管闭锁系统260a和260b其中之一的结构和工作,将作为它们的代表在此加以说明。可以这样理解,当从激光焊接系统中清除锆合金细屑时,它们中的一些将被截留在气体收集导管240内,因此需要进行周期性清洗。正如图8特意指出的那样,气体收集导管240位于透镜密封罩246的内部,而导管也有一个开口用于密封安放激光聚焦透镜系统204。采用一个槽键358部分固定气体收集导管240,槽键固定在透镜密封罩246内,并安装于气体收集导管240的导槽360中,以便把导管240正确地定位在贯穿密封板156的导管开口364内。同样如图8所示,气体收集导管240包括一个下部导管段368和一个上部导管段370,这两个导管段一起形成气体收集导管240。在板156中的导管开口364具有一个与下部导管段368的凸缘相结合的凹槽366,以便通过导管240和激光聚焦透镜系统204调节中心开口367。Referring now to FIGS. 7, 8 and 9, the structure and operation of one of the
气体收集导管240被放松地锁定在密封板156的适当位置上,并且通过导管闭锁系统260,分别与刚性排气管302和304相耦接,闭锁系统260包括一对枢轴支撑的闭锁杆376a和376b,以及一个闭锁安装板338。图7示出闭锁安装板338在第一位置或闭锁位置上,而图9示出此板在第二位置或非闭锁位置上,闭锁安装板338可通过一个趋动马达348在这两个位置之间移动,马达348通过趋动螺旋机构350机械耦接到闭锁安装板338上,趋动螺旋机构350可提供机械推进,将趋动马达348的转动输出转换成位于闭锁安装板338上与垫块342相连接的活塞352的直线运动。正如图7明确指出的那样,闭锁安装板338的运动通过通过导销344a、344b和344c被控制在上述第一和第二位置之间,这些导销固定在密封板156上,分别被约束在由闭锁安装板338中形成的细长导槽346a、346b和346c中。
两个闭锁杆376a和376b分别通过枢轴销378a和378b枢轴支撑在密封板156上,每个销都在离闭锁杆两端有段距离的某一点枢轴支撑与其相关的闭锁杆。每个闭锁杆376a或376b在其一端邻近处都有一个内向锁定抓手386a或386b,它们穿过在透镜密封罩246上的开口387a或387b,与在气体收集导管240中的定位槽356a或356b相咬合(也参见图4和图9);每个闭锁杆在其另一端邻近处都枢轴连接在闭锁安装板338上,其方式是使闭锁安装板338能向相反的两个方向移动从而驱动锁定杆的锁定抓手386分别移进和移出气体收集导管240中的定位槽356a或356b的锁定咬合,在每个闭锁杆376和闭锁安装板338之间的枢轴连接是由滚轴382a或382b以及细长的凸轮槽384a或384b形成的,这种滚轴位于闭锁安装板338上的支撑架380a或380b的两个臂381(见图11)之间,并由其转动支撑;而凸轮槽384a和384b位于两个支撑臂381之间延伸的闭锁杆376的一个端部,並与滚轴382相互配合。Two latch levers 376a and 376b are pivotally supported on
这样,当期望把气体收集导管240闭锁在密封板156上时,给趋动马达348通电,使闭锁安装板338运动到左边,如图7、8和9所示,从而使两个闭锁杆376从图9所示的位置错状趋动到图7所示的实线位置,这样即可使闭锁杆的锁定抓手386a和386b与气体收集导管240中的定位槽356a和356b相咬合,把收集导管240锁在密封板156上。另外,闭锁安装板338的这种运动,使安装在其端部的,方向朝着气体收集导管240的磨损垫354与同样在导管上形成的相应定位槽356c相咬合。当期望开锁或解脱气体收集导管240,以便把它取下和清洗时,可给趋动马达348通电,使闭锁安装板338向相反的方向运动,即从图7所示的位置移至图9所示的位置,因而定位或锁定抓手386a、386b和磨损垫354即可从气体收集管240的定位槽356a、356b和356c中撤出。In this way, when it is desired to lock the
图8、图9和图10最清楚地说明了气体收集导管240。它被设计成不仅便于脱离密封板156,而且在放回密封板156的导管开口364之前,便于拆卸和清洗。如前所述,气体收集导管240具有一个下部导管段368(图8)和一个上部管段370。从图9可知,下部导管段368中已形成大量入射口372a、372b、372c和372d,其中有一些,如入射口372a和372b,通入第一个过渡腔374a内并与其相连(见图10),而剩下的入射口372c和372d通入第二个过渡腔374b内并与其相连。入射口372和过渡腔374a、374b按设计要求,可使通过的气流速度的任何降低减至最小,因而使气体收集导管240中收集的和从气流中沉积下来的粒子物质的量降至最低限度。所以,为保持气流速度基本不变,精心设计了入射口372和过渡腔374的外形,在气流面积的横截面没有显著增加的情况下,把通过入射口372进入的气体平稳地引向并射入一对出射口392a和392b,过渡腔374按设计要求可使入射口372逐渐将弧形、较狭窄的流动外形变为出射口392的圆截面流动外形,此外,每个出、入射口都靠近其中点呈流线型地接到有关的过渡腔374a或374b上,以便使来自入射口372a、372b或372c、372d的气体通路能分别进入出射口392a或392b。The
正如图7和图9极好证明的那样,刚性管301a和301b的安装可使它们相对于闭锁安装板338作有限的轴向相对运动。在每个管301a和301b的入口端都有一个环状密封凸缘388a或388b,它们可分别与插孔390a或390b相配合,而插孔分别形成在与有关的出射口392a或392b轴向调准的气体收集导管240中,并具有一个O型环394a或394b。当管301a和301b的凸缘端部完全插入有关的插孔390中时,管301的密封凸缘388a和388b与相应的O型环394a和394b密封接触以防止漏气。As best demonstrated in FIGS. 7 and 9, the
正如从图9和图12明显看出的那样,每个管301a和301b都由滑动凸缘396a、398a或396b、398b以及固定导块400a、402a或400b、402b滑动支撑在闭锁安装板338上,滑动凸缘固定安装在相应的管301相对的两侧上以轴向间隔定位;而固定导块固定在闭锁安装板338上并可滑动支撑管上的相应滑动凸缘。As is apparent from Figures 9 and 12, each
正如图9极好证明的那样,滑动管301与刚性排气管302和304相耦接,其耦接方式允许301a和301b滑动,并且使位移弹簧406a和406b滑动,以便在相应的管301的密封凸缘388和有关的导管插孔390中的O型环394彼此咬合时保持密封压力。更准确地说,每个滑动管301上都有一个弹簧固定凸缘404,而每个排气管302和304上都有一个卡圈408,与其相关的一个位移弹簧406(螺旋弹簧)被压紧放入凸缘404和卡圈408之间。在管301的密封凸缘388与O型环394相咬合后仍然发生的管301a和301b的弹性轴向运动的范围,可通过按照在每个管301上的各个凸缘404和相邻导块400、402之间的间隔,比较图7和9而得出。As best demonstrated in FIG. 9 , sliding tube 301 is coupled to
从图8、图9和图12将得知,两个卡圈408a和408b都分别与调节机构408a或408b相联系,调节机构包括被一个适当的扣钉413(图12)固定在闭锁安装板338上的支撑部件416,一个附加在有关的排气管302或304上的耦接部件412,以及与支撑部件416螺旋啮合的调节器414,这样安排的目的是,调节装置414的转动将使耦接部件412移动,因而调节卡圈408的位置,以相应改变由相应的弹簧406所施加的密封力。这种调节可以随意进行或根据需要偶尔进行以抵偿各滑动管301与O型环394在相应的导管插孔390初始咬合时,相应的滑动管301的残余运动范围出现的变化。It will be known from Fig. 8, Fig. 9 and Fig. 12 that the two
现在参考图13、图14和图15,把箱密封系统244a和244b(图4)中的一个作为它们两个的代表加以说明。每个密封系统244基本上都包括一个通常为环状的密封元件428和密封趋动设备418,密封元件428由相应的焊接箱108的顶部凸缘109所支撑,并直接位于密封板156的下部,围绕箱108的开启顶端伸展;而密封趋动设备强迫密封元件428与密封板156的底面进入密封咬合。更确切地说,密封元件428是一个由适当材料,例如充满玻璃的聚四氟乙烯(giass-filled Teflon),制成的弹性圈;而趋动设备418包括一个适当材料,例如聚氯丁橡胶(neoprene),制成的可膨胀的环状管,它直接位于密封圈428的下部,这样,当趋动设备膨胀时,例如通过一个接管426(图13),即可强迫密封圈428与密封板156的下表面密封咬合,如图15所示。对可膨胀的管418的支撑由一个垫圈414提供,在垫圈的上面具有一个用于安放可膨胀管418的环形凹槽416。垫圈414和密封圈428通过一个环状护圈420和螺栓422固定在支撑圈415上,方法是夹住密封圈428在垫圈414和护圈420的凸缘424之间的内边部位,并且夹住在护圈420和支撑圈415的外凸缘部位之间的垫圈414的内凸缘部位,然后再依次把支撑圈415固定在,例如用螺栓连接,焊接箱的上部凸缘109上。为了使焊接箱108从一个焊接位置移到另一个焊接位置时,相对定位机构288(图4)的摩擦和阻力最小,密封板156最好具有一个抛光的下表面,例如一个抛光的铬表面,而密封趋动管418用压力,例如0.15到0.20大气压膨胀,使密封圈428以适度的力顶压在密封板156的抛光表面上,当然,这足以提供密封圈428和密封板156之间适宜的密封接合。如图14所示,在环状支撑部件415的上表面417和密封板156的下表面之间留有一段狭窄的空间,以便允许焊接箱108很容易地撤至其装料位置,如图4所示的箱108b的位置。Referring now to Figures 13, 14 and 15, one of the tank sealing systems 244a and 244b (Figure 4) will be described as representative of both. Each
激光焊接装置102的工作基本上包括三个连续进行的过程,即装料、净化和焊接。在完成一个燃料棒格栅16的焊接以后,滑板262与在其上的焊接箱108一起,从相应的定位舱106中撤到装料位置,在此位置上,焊接的燃料棒格栅可以很容易地从箱中取出并装上一个待焊接的新工件。在卸料和重新装料过程中,可能已经沉积在气体收集导管240内的锆合金细屑可通过使启动机构310(图6)关闭舌阀306加以清除。当排气风箱324工作时,导管254内将产生足够的负压,通过气体导管240、排气管302和304、弹性管250和252以及导管254吸入空气。按这种方法吸入的空气将通过排气系统248迅速氧化锆合金细屑,因此减少了锆合金细屑的沉淀可能聚集而后燃烧或爆炸的可能性。The work of the
下一个待焊的燃料棒格栅放入焊接箱108,而且任何聚集的锆合金细屑已经除去以后,滑板262与放在其上的加料焊接箱108一起回复到定位舱106内,如图4所示。此时,激光焊接装置102开始净化操作,以清除焊接箱108中的空气和湿气。在焊接箱108内能够污染燃料棒格栅焊接的残存空气,例如通过在可转动夹具242(图3和13)中的导管(未标出)和在焊接箱108底部的扩散器(未标出)使一种惰性气体,例如氩气,进入焊接箱108内进行清洗。氩气就这样被以一个较高的速率引入,清洗吸入了空气和湿气的焊接箱108,直至达到预定水平。在清洗过程中,不启动密封圈428,这样,从箱108中溢出的氩气可以通过环状支撑部件415和密封板156之间的空隙排走。The next fuel rod grid to be welded is put into the
接着进行焊接,以完成焊接箱108内、放于惰性气体环境中的格栅上的各种槽和翼片焊接34、角缝焊接30和交叉焊接32。在焊接过程中,导管254的舌阀306处于开启位置(图6中的虚线),这样,导管254和焊接箱108中由排气风箱324所形成的负压即可消除,不使氩气从焊接箱108中排出,也不使可导致焊接污染的空气吸入。随着惰性气体不断进入焊接箱108内,箱内氩气氛的压力也不断增加,直到惰性气体从箱的顶部排出,流过气体收集导管240、排气管302和304以及弹性管250、252进入导管254,在这里被排气风箱324吸入可以清除锆合金粒子和通过排气导管258排放氩气的粒子收集系统236中。Welding follows to complete the various slot and tab welds 34, fillet welds 30 and cross welds 32 within the
经过一定次数的焊接操作后,气体收集导管240内可能已截留了足够多的锆合金细屑,最好能清洗气体收集导管240,清洗过程如前所述,马达348通电(图7、图8和图9)后,闭锁安装板338运动,使滑管301从气体收集导管240中的插孔390内撤出,与此同时,使闭锁杆376和磨损垫354运动,脱离与导管240的定位槽256的闭锁咬合。现在可以把气体收集导管240从透镜密封罩246中取下,而导管240的两段368和370可以分离,显露出入射口372、过渡腔374和出射口392以利清洗。一旦导管内的锆合金细屑清洗完毕,导管即被重新组装好,再放回到密封板156的导管开口364中去,并通过闭锁系统260锁定在适当的位置上。After a certain number of welding operations, enough zirconium alloy fines may have been trapped in the
Claims (13)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 85105567CN85105567A (en) | 1985-07-20 | 1985-07-20 | Laser beam welding device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 85105567CN85105567A (en) | 1985-07-20 | 1985-07-20 | Laser beam welding device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN85105567Atrue CN85105567A (en) | 1987-01-21 |
Family
ID=4794562
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 85105567PendingCN85105567A (en) | 1985-07-20 | 1985-07-20 | Laser beam welding device |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN85105567A (en) |
- 1985
- 1985-07-20CNCN 85105567patent/CN85105567A/enactivePending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US4642445A (en) | Shielding apparatus for metal processing operations | |
| EP0206027A2 (en) | End-of-arm tooling carousel apparatus for use with a robot | |
| US5378898A (en) | Electron beam system | |
| JP5389236B2 (en) | Ablation method and apparatus | |
| CN100522455C (en) | Dry cleaning system using laser | |
| TWI323003B (en) | Reactor design to reduce particle deposition during process abatement | |
| US4501949A (en) | Movable machining chamber with rotatable work piece fixture | |
| CN105723282B (en) | Optical arrangement, in particular plasma light source or EUV lithography apparatus | |
| CN1430243A (en) | Online laser wafer seat cleaning device | |
| EP0102835B1 (en) | Apparatus and method for laser machining in a non-reactive environment | |
| BE897641A (en) | Apparatus for laser processing | |
| CN107717227B (en) | A laser narrow gap welding head | |
| JP2011524643A (en) | Particle cleaning of optical elements for microlithography | |
| AU2021278997A1 (en) | Modular architecture for additive manufacturing | |
| JP6882551B2 (en) | A device for generatively producing a three-dimensional object | |
| KR910004963B1 (en) | Laser processing equipment | |
| CN1332649A (en) | Flame arrester | |
| EP0168673B1 (en) | Laser beam welding apparatus | |
| CN85105567A (en) | Laser beam welding device | |
| US20230095918A1 (en) | Laser processing head having contamination resistance | |
| US3742183A (en) | Optical element protection in laser apparatus | |
| FR2702980A1 (en) | Recovery device for machining machine | |
| CN115922175A (en) | Intelligent welding equipment is used in production of hoist cantilever crane | |
| CN1868614A (en) | Purging system having workpiece movement device | |
| JP2000197983A (en) | Laser cutting method and laser cutting device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| WD01 | Invention patent application deemed withdrawn after publication |