CN216352391U - Logistics sorting system - Google Patents
Logistics sorting systemDownload PDFInfo
- Publication number
- CN216352391U CN216352391UCN202122923619.8UCN202122923619UCN216352391UCN 216352391 UCN216352391 UCN 216352391UCN 202122923619 UCN202122923619 UCN 202122923619UCN 216352391 UCN216352391 UCN 216352391U
- Authority
- CN
- China
- Prior art keywords
- sorting
- conveying line
- goods
- conveying
- conveyor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C3/00—Sorting according to destination
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
Landscapes
- Business, Economics & Management (AREA)
- Engineering & Computer Science (AREA)
- Economics (AREA)
- Quality & Reliability (AREA)
- Tourism & Hospitality (AREA)
- Human Resources & Organizations (AREA)
- Marketing (AREA)
- Operations Research (AREA)
- Development Economics (AREA)
- Strategic Management (AREA)
- Entrepreneurship & Innovation (AREA)
- Physics & Mathematics (AREA)
- General Business, Economics & Management (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Structure Of Belt Conveyors (AREA)
- Branching, Merging, And Special Transfer Between Conveyors (AREA)
- Warehouses Or Storage Devices (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese本申请是向中国专利局提交的申请号为202120678289.8,申请日为2021年3月31日,发明创造名称为“物流分拣系统”的实用新型专利申请的分案申请。This application is a divisional application for a utility model patent application named "Logistics Sorting System" for invention and creation, filed with the China Patent Office with the application number of 202120678289.8, the application date is March 31, 2021.
技术领域technical field
本实用新型涉及仓储物流技术领域,特别涉及一种物流分拣系统。The utility model relates to the technical field of warehousing and logistics, in particular to a logistics sorting system.
背景技术Background technique
目前的物流中心对物流仓储配送的效率要求越来越高,物流分拣作为物流仓储配送中十分重要的环节,保证持续高效率的分拣工作,可以提高货物的整体出库效率。The current logistics center has higher and higher requirements for the efficiency of logistics warehousing and distribution. As a very important link in logistics warehousing and distribution, logistics sorting can ensure continuous and efficient sorting work, which can improve the overall efficiency of goods delivery.
现有技术中,物流中心通常划分为仓储区域和分拣区域,仓储区域通过设置货架以储存货物,在物流配送过程中,首先将需要出库的货物由货架取出并运送至分拣区域,而分拣工作通常由人工完成,分拣后的货物再由人工进行打包或装箱。In the prior art, the logistics center is usually divided into a storage area and a sorting area. The storage area is equipped with shelves to store goods. During the logistics and distribution process, the goods that need to be out of the warehouse are first taken out from the shelves and transported to the sorting area. The sorting work is usually done manually, and the sorted goods are then packed or boxed manually.
然而,现有的物流分拣过程的效率较低。However, existing logistics sorting processes are inefficient.
实用新型内容Utility model content
本实用新型提供一种物流分拣系统,可以提高物流分拣的效率。The utility model provides a logistics sorting system, which can improve the efficiency of logistics sorting.
本实用新型提供一种物流分拣系统,该物流分拣系统包括货架、分拣装置、物料转运装置和货物接收装置,物料转运装置可以将货架上的货物运送至分拣装置进行分拣,分拣后的货物可以通过货物接收装置直接打包出库或者分类形成订单再打包出库。The utility model provides a logistics sorting system. The logistics sorting system comprises a shelf, a sorting device, a material transfer device and a goods receiving device. The material transfer device can transport the goods on the shelf to the sorting device for sorting, and the sorting The picked goods can be directly packaged out of the warehouse through the goods receiving device or sorted to form an order and then packaged out of the warehouse.
其中,货架可以为多个,多个货架间隔排列形成仓储区域,分拣装置为多个,且多个分拣装置在仓储区域的边缘外侧间隔分布,分拣装置包括输送组件和拣选组件,输送组件用于传送物料箱,拣选组件设置于输送组件的侧方,拣选组件用于对输送组件上物料箱中的货物进行分拣,料箱转运装置包括料箱搬运机器人,料箱搬运机器人用于将待分拣的物料箱由货架搬运至输送组件,并接收输送组件送出的货物分拣后的物料箱,货物接收装置设置于分拣装置背离货架的一端,货物接收装置用于接收拣选组件从物料箱中取出的货物,从而将货物按订单进行分类或者直接出库。Among them, there can be multiple shelves, the multiple shelves are arranged at intervals to form a storage area, there are multiple sorting devices, and the multiple sorting devices are distributed at intervals outside the edge of the storage area. The sorting device includes a conveying component and a picking component. The component is used to transfer the material box, and the picking component is arranged on the side of the conveying component. The picking component is used to sort the goods in the material box on the conveying component. The material box transfer device includes a material box handling robot, and the material box handling robot is used for The material box to be sorted is transported from the shelf to the conveying component, and the sorted material box sent by the conveying component is received. The goods receiving device is arranged at the end of the sorting device away from the shelf, and the goods receiving device is used to receive the picking component from The goods taken out of the material box, so that the goods can be sorted according to the order or directly out of the warehouse.
本申请提供的物流分拣系统中,由料箱搬运机器人完成货物的取送任务,而料箱搬运机器人可以直接与分拣装置对接,将待分拣的物料箱直接运送至分拣装置,同时接受分拣后的物料箱并进入下一个作业任务,分拣装置可以持续进行货物分拣任务,从而整体提高了物流分拣系统的配送出库效率。In the logistics sorting system provided by this application, the material box handling robot completes the task of picking up and delivering goods, and the material box handling robot can directly connect with the sorting device, and directly transport the material boxes to be sorted to the sorting device. After accepting the sorted material box and entering the next task, the sorting device can continue to carry out the task of sorting the goods, thereby improving the overall efficiency of the logistics sorting system.
作为一种可选的实施方式,输送组件包括第一输送线,第一输送线具有入口和出口,其入口和出口分别位于第一输送线的两端,从而物料箱可以从第一输送线的一端进入输送组件,并由输送组件的另一端离开。As an optional embodiment, the conveying assembly includes a first conveying line, the first conveying line has an inlet and an outlet, and the inlet and the outlet are respectively located at two ends of the first conveying line, so that the material box can pass from the first conveying line. One end enters the conveying assembly and leaves the other end of the conveying assembly.
作为一种可选的实施方式,入口和出口位于第一输送线的同一侧,料箱搬运机器人从入口放入物料箱,并从出口接收物料箱,从而料箱搬运机器人可以在第一输送线的同一侧接放物料箱,减短料箱搬运机器人的移动路径。As an optional embodiment, the inlet and the outlet are located on the same side of the first conveying line, the material box handling robot puts the material box from the entrance, and receives the material box from the outlet, so that the material box handling robot can move on the first conveying line. The same side to pick up and place the material box shortens the moving path of the material box handling robot.
作为一种可选的实施方式,第一输送线为多个,且多个第一输送线分成至少两个输送线组,每个输送线组包括至少两个第一输送线,拣选组件为多个,每个输送线组对应一个拣选组件,从而一个拣选组件可以对多条第一输送线进行分拣。As an optional embodiment, there are multiple first conveying lines, and the multiple first conveying lines are divided into at least two conveying line groups, each conveying line group includes at least two first conveying lines, and the picking components are multiple Each conveying line group corresponds to one picking component, so that one picking component can sort multiple first conveying lines.
作为一种可选的实施方式,输送线组包括第一输送线组,拣选组件包括分拣机器人和人工分拣台,分拣机器人和人工分拣台位于第一输送线的不同侧,从而可以通过分拣机器人和人工的配合同时进行货物分拣,提高货物分拣的效率。As an optional embodiment, the conveying line group includes a first conveying line group, and the sorting assembly includes a sorting robot and a manual sorting table, and the sorting robot and the manual sorting table are located on different sides of the first conveying line, so that the Through the cooperation of sorting robots and manual labor, the goods are sorted at the same time, and the efficiency of goods sorting is improved.
作为一种可选的实施方式,第一输送线可以间隔设置,分拣机器人位于两个相邻的第一输送线之间,从而分拣机器人可以对两个第一输送线上的物料箱中货物分别进行分拣。As an optional embodiment, the first conveying lines may be arranged at intervals, and the sorting robot is located between two adjacent first conveying lines, so that the sorting robot can process the material boxes on the two first conveying lines. Goods are sorted separately.
作为一种可选的实施方式,分拣机器人为机械臂,机械臂的工作半径大于相邻两个第一输送线之间间距的一半,从而使得机械臂的工作范围可以同时覆盖其两侧的第一输送线。As an optional implementation, the sorting robot is a robotic arm, and the working radius of the robotic arm is greater than half of the distance between two adjacent first conveying lines, so that the working range of the robotic arm can cover both sides of the robotic arm at the same time. The first conveyor line.
作为一种可选的实施方式,至少两个输送线组包括第二输送线组,拣选组件包括至少两个人工分拣台,人工分拣台与第一输送线一一对应设置,从而对不同第一输送线上物料箱中的货物分别进行分拣。As an optional embodiment, the at least two conveying line groups include a second conveying line group, and the sorting assembly includes at least two manual sorting tables, and the manual sorting tables are arranged in a one-to-one correspondence with the first conveying line, so that different The goods in the material boxes on the first conveyor line are sorted separately.
作为一种可选的实施方式,输送组件包括第二输送线,第二输送线包括上层输送线和下层输送线,上层输送线和下层输送线沿相同方向延伸且上下重叠设置,且上层输送线和下层输送线两者中的一者传送待分拣的物料箱,另一者传送货物分拣后的物料箱,从而可以减少第二输送线所占用的空间,提高空间利用率。As an optional embodiment, the conveying assembly includes a second conveying line, the second conveying line includes an upper conveying line and a lower conveying line, the upper conveying line and the lower conveying line extend in the same direction and are arranged in an overlapping manner, and the upper conveying line One of the two conveying lines and the lower conveying line conveys the material boxes to be sorted, and the other conveys the material boxes after the goods are sorted, so that the space occupied by the second conveying line can be reduced and the space utilization rate can be improved.
作为一种可选的实施方式,物料箱在上层输送线和下层输送线上沿相反方向移动,从而物料箱可以在第二输送线上沿一个方向进行货物拣选,而拣选完成后的物料箱可以沿相反方向返回。As an optional embodiment, the material boxes move in opposite directions on the upper conveying line and the lower conveying line, so that the material boxes can be picked in one direction on the second conveying line, and the material boxes after the picking can be Return in the opposite direction.
作为一种可选的实施方式,第二输送线的第一端同时设置有上层输送线的入货口和下层输送线的出货口,第二输送线的第二端同时设置有上层输送线的出货口和下层输送线的入货口,料箱搬运机器人与第二输送线的第一端对接,从而料箱搬运机器人不需要移动即可在同一位置接放物料箱。As an optional embodiment, the first end of the second conveying line is provided with the inlet port of the upper conveying line and the outgoing port of the lower conveying line, and the second end of the second conveying line is simultaneously provided with the upper conveying line The first end of the second conveyor line is docked with the material box handling robot, so that the material box handling robot can pick up and place material boxes at the same position without moving.
作为一种可选的实施方式,上层输送线包括主输送段和至少一个分拣输送段,分拣输送段的两端分别与主输送段延伸方向的不同位置连接,分拣输送段用于在主输送段的一侧形成分拣位。As an optional embodiment, the upper conveying line includes a main conveying section and at least one sorting and conveying section, two ends of the sorting and conveying section are respectively connected to different positions in the extension direction of the main conveying section, and the sorting and conveying section is used in the One side of the main conveyor section forms the sorting position.
作为一种可选的实施方式,第二输送线的第二端设置有对接结构,对接结构用于将位于上层输送线的物料箱转运至下层输送线,从而物料箱可以在上层输送线进行货物分拣,其后分拣后的物料箱可以通过对接结构在第二输送线的第二端转移至下层输送线,并由下层输送线返回。As an optional embodiment, the second end of the second conveying line is provided with a docking structure, and the docking structure is used to transfer the material boxes located on the upper conveying line to the lower conveying line, so that the material boxes can carry goods on the upper conveying line. After sorting, the sorted material boxes can be transferred to the lower conveying line at the second end of the second conveying line through the docking structure, and returned by the lower conveying line.
作为一种可选的实施方式,对接结构可以包括升降机构,升降机构包括升降平台,升降平台可沿第二输送线的高度方向移动,且在移动行程的两端分别与上层输送线和下层输送线对接,物料箱在第二输送线的第二端可以转移至升降平台上,从而可以将物料箱由上层输送线转移至下层输送线。As an optional embodiment, the docking structure may include a lifting mechanism, the lifting mechanism includes a lifting platform, the lifting platform can move along the height direction of the second conveying line, and is respectively connected to the upper conveying line and the lower conveying line at both ends of the moving stroke. Line docking, the material box can be transferred to the lifting platform at the second end of the second conveying line, so that the material box can be transferred from the upper conveying line to the lower conveying line.
作为一种可选的实施方式,对接结构可以包括坡度转向机构,坡度转向机构包括承载件,承载件用于承接物料箱,承载件可相对于第二输送线的第二端转动,以将物料箱由上层输送线转移至下层输送线。As an optional embodiment, the docking structure may include a gradient steering mechanism, the gradient steering mechanism includes a bearing member, the bearing member is used to receive the material box, and the bearing member can be rotated relative to the second end of the second conveying line to transfer the material The boxes are transferred from the upper conveying line to the lower conveying line.
作为一种可选的实施方式,坡度转向机构还包括安装柱和驱动单元,承载件的第一端与安装柱转动连接,并在驱动单元的驱动下转动,承载件的第二端在转动行程的两端分别与上层输送线和下层输送线对接,当物料箱移动至承载件上时,承载件可以由上层输送线的端部向下层输送线转动,从而实现物料箱的转移。As an optional embodiment, the gradient steering mechanism further includes a mounting column and a driving unit, the first end of the carrier is rotatably connected to the mounting column and rotated under the driving of the driving unit, and the second end of the carrier is in the rotational stroke The two ends of the conveyor are connected with the upper conveyor line and the lower conveyor line respectively. When the material box moves to the carrier, the carrier can be rotated from the end of the upper conveyor line to the lower conveyor line, so as to realize the transfer of the material box.
作为一种可选的实施方式,货物接收装置包括至少一个货物输送线,货物输送线的出货口与包装平台对接,从而分拣后的货物可以沿货物输送线移动至包装平台直接打包出库。As an optional embodiment, the goods receiving device includes at least one goods conveying line, and the outgoing port of the goods conveying line is docked with the packaging platform, so that the sorted goods can be moved along the goods conveying line to the packaging platform to be directly packaged out of the warehouse .
作为一种可选的实施方式,本申请提供的物流分拣系统还可以包括货物分类盒,货物分类盒包括多个容纳腔,货物接收装置包括货物搬运机器人,货物搬运机器人用于将货物运送至容纳腔内,从而将同一订单的货物放置在同一容纳腔中,其后集中出库。As an optional embodiment, the logistics sorting system provided in the present application may further include a cargo sorting box, the cargo sorting box includes a plurality of accommodating cavities, and the cargo receiving device includes a cargo handling robot, which is used to transport the cargo to In the accommodating cavity, the goods of the same order are placed in the same accommodating cavity, and then they are collectively released from the warehouse.
作为一种可选的实施方式,拣选组件的一侧可以设置有等待位,等待位用于货物搬运机器人等待接收货物。As an optional implementation manner, one side of the picking assembly may be provided with a waiting position, and the waiting position is used for the goods handling robot to wait for receiving goods.
本实用新型提供的物流分拣系统包括货架、分拣装置、物料转运装置和货物接收装置,货架可以为多个,多个货架间隔排列形成仓储区域,分拣装置为多个,且多个分拣装置在仓储区域的边缘外侧间隔分布,分拣装置包括输送组件和拣选组件,输送组件用于传送物料箱,拣选组件设置于输送组件的侧方,拣选组件用于对输送组件上物料箱中的货物进行分拣,料箱转运装置包括料箱搬运机器人,料箱搬运机器人用于将待分拣的物料箱由货架搬运至输送组件,并接收输送组件送出的货物分拣后的物料箱,货物接收装置设置于分拣装置背离货架的一端,货物接收装置用于接收拣选组件从物料箱中取出的货物,从而将货物按订单进行分类或者直接出库,分拣装置可以持续进行货物分拣任务,整体提高物流分拣系统的配送出库效率。The logistics sorting system provided by the utility model includes a rack, a sorting device, a material transfer device and a goods receiving device. There can be multiple racks, and the multiple racks are arranged at intervals to form a storage area. There are multiple sorting devices, and the multiple sorting devices The picking devices are distributed at intervals outside the edge of the storage area. The sorting device includes a conveying component and a picking component. The conveying component is used to transfer the material box. The picking component is arranged on the side of the conveying component. The material box transfer device includes a material box handling robot. The material box handling robot is used to transport the material boxes to be sorted from the shelves to the conveying components, and receive the sorted material boxes sent by the conveying components. The cargo receiving device is arranged at the end of the sorting device away from the shelf. The cargo receiving device is used to receive the goods taken out from the material box by the picking component, so as to sort the goods according to the order or directly leave the warehouse. The sorting device can continuously sort the goods. task, and improve the overall efficiency of the distribution and delivery of the logistics sorting system.
除了上面所描述的本申请实施例解决的技术问题、构成技术方案的技术特征以及由这些技术方案的技术特征所带来的有益效果外,本申请提供的物流分拣系统所能解决的其他技术问题、技术方案中包含的其他技术特征以及这些技术特征带来的有益效果,将在具体实施方式中作出进一步详细的说明。In addition to the technical problems solved by the embodiments of the present application described above, the technical features constituting the technical solutions, and the beneficial effects brought about by the technical features of these technical solutions, other technologies that can be solved by the logistics sorting system provided by the present application The problems, other technical features included in the technical solution, and the beneficial effects brought about by these technical features will be described in further detail in the specific embodiments.
附图说明Description of drawings
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。In order to more clearly illustrate the embodiments of the present application or the technical solutions in the prior art, the following will briefly introduce the accompanying drawings used in the description of the embodiments or the prior art. Obviously, the accompanying drawings in the following description These are some embodiments of the present application, and for those of ordinary skill in the art, other drawings can also be obtained from these drawings without any creative effort.
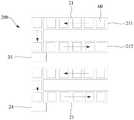
图1为本申请实施例提供的物流分拣系统的结构示意图;1 is a schematic structural diagram of a logistics sorting system provided by an embodiment of the present application;
图2为本申请实施例提供的物流分拣系统中第一输送线组的结构示意图;2 is a schematic structural diagram of a first conveying line group in a logistics sorting system provided by an embodiment of the present application;
图3为本申请实施例提供的物流分拣系统中第二输送线组的结构示意图;3 is a schematic structural diagram of a second conveying line group in the logistics sorting system provided by the embodiment of the present application;
图4为本申请实施例提供的物流分拣系统中第二输送线的结构示意图;4 is a schematic structural diagram of a second conveying line in a logistics sorting system provided by an embodiment of the present application;
图5为本申请实施例提供的物流分拣系统中第二输送线第二端的结构示意图;5 is a schematic structural diagram of the second end of the second conveying line in the logistics sorting system provided by the embodiment of the present application;
图6为本申请实施例提供的物流分拣系统中料箱搬运机器人的结构示意图。FIG. 6 is a schematic structural diagram of a bin handling robot in a logistics sorting system provided by an embodiment of the present application.
附图标记说明:Description of reference numbers:
10-货架;10 - Shelves;
20a-第一输送线组;20b-第二输送线组;21-第一输送线;211-入口;212-出口;22-第二输送线;221-上层输送线;2211-主输送段;2212-分拣输送段;222-下层输送线;223-坡度转向机构;2231-承载件;2232-安装柱;23-分拣机器人;24-人工分拣台;20a-first conveying line group; 20b-second conveying line group; 21-first conveying line; 211-inlet; 212-exit; 22-second conveying line; 221-upper conveying line; 2211-main conveying section; 2212-sorting conveying section; 222-lower conveying line; 223-slope steering mechanism; 2231-bearing; 2232-installation column; 23-sorting robot; 24-manual sorting table;
30-料箱搬运机器人;30 - Container handling robot;
40-货物输送线;41-货物搬运机器人;40-cargo conveyor line; 41-cargo handling robot;
50-货物分类盒;50 - cargo sorting box;
60-物料箱;60-material box;
70-包装平台。70 - Packaging platform.
具体实施方式Detailed ways
为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。In order to make the purposes, technical solutions and advantages of the embodiments of the present utility model clearer, the technical solutions in the embodiments of the present utility model will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present utility model. The embodiments described above are a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work fall within the protection scope of the present invention.
首先,本领域技术人员应当理解的是,这些实施方式仅仅用于解释本申请的技术原理,并非旨在限制本申请的保护范围。本领域技术人员可以根据需要对其作出调整,以便适应具体的应用场合。First of all, those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present application, and are not intended to limit the protection scope of the present application. Those skilled in the art can adjust it as needed to adapt to specific applications.
其次,需要说明的是,在本申请的描述中,术语“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示装置或构件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。Secondly, it should be noted that, in the description of this application, the terms of direction or positional relationship indicated by the terms "inner" and "outer" are based on the direction or positional relationship shown in the drawings, which is only for the convenience of description, It is not intended to indicate or imply that a device or component must have a particular orientation, be constructed and operate in a particular orientation, and therefore should not be construed as a limitation of the present application.
此外,还需要说明的是,在本申请的描述中,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是两个构件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本申请中的具体含义。In addition, it should be noted that, in the description of this application, unless otherwise expressly specified and limited, the terms "connected" and "connected" should be understood in a broad sense, for example, it may be a fixed connection or a detachable connection , or an integral connection; it can be a mechanical connection or an electrical connection; it can be the internal communication of the two components. For those skilled in the art, the specific meanings of the above terms in this application can be understood according to specific situations.
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本公开的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。In the description of this specification, reference to the terms "one embodiment," "some embodiments," "exemplary embodiment," "example," "specific example," or "some examples", etc., is meant to incorporate the embodiments A particular feature, structure, material, or characteristic described by an example or example is included in at least one embodiment or example of the present disclosure. In this specification, schematic representations of the above terms do not necessarily refer to the same embodiment or example. Furthermore, the particular features, structures, materials or characteristics described may be combined in any suitable manner in any one or more embodiments or examples.
在现代物流系统中,分拣是一个十分重要的过程,目前的物流中心对物流仓储配送的效率要求越来越高,而保证持续高效率的分拣工作,可以提高货物的整体出库效率。物流中心通常可以划分为仓储区域和分拣区域,仓储区域设置有货架以储存货物,在物流配送过程中,首先将需要出库的货物由货架取出并运送至分拣区域,在分拣区域对货物按订单需求进行分拣。In the modern logistics system, sorting is a very important process. At present, the logistics center has higher and higher requirements for the efficiency of logistics warehousing and distribution, and ensuring continuous and efficient sorting work can improve the overall delivery efficiency of goods. The logistics center can usually be divided into a storage area and a sorting area. The storage area is equipped with shelves to store goods. During the logistics and distribution process, the goods that need to be out of the warehouse are first taken out from the shelves and transported to the sorting area. Goods are sorted according to order requirements.
现有的物流中心虽然在许多应用场景下进行了一定程度的自动化改造,但多数改造主要是对仓储区域的改造,例如利用堆垛机进行货物取放,但对于仓储规模较大的物流中心,建立固定的货物传输线与堆垛机移动轨道使得整体物流过程柔性较差且成本较高,同时,货物取出后的分拣过程仍然需要依靠人工完成,物流分拣过程的效率较低。Although the existing logistics centers have undergone a certain degree of automation transformation in many application scenarios, most of the transformations are mainly for the transformation of storage areas, such as the use of stackers to pick up and place goods. The establishment of fixed cargo transmission lines and stacker moving tracks makes the overall logistics process less flexible and costly. At the same time, the sorting process after the goods are taken out still needs to be completed manually, and the efficiency of the logistics sorting process is low.
本申请提供一种物流分拣系统,货物由仓储区域至分拣区域的传递过程具有更好柔性,同时可以提高货物分拣的效率。The present application provides a logistics sorting system, and the transfer process of goods from a storage area to a sorting area has better flexibility, and at the same time, the efficiency of goods sorting can be improved.
首先,对于申请实施例的应用场景,本申请实施例提供的物流分拣系统可以应用于制造业工厂库存产品的出库、零售业库存产品的出库,也可以应用于电商物流的快递出库分拣等不同领域,且涉及运输和分拣的产品或货物可以是工业零部件、电子配件或产品、药物、服装饰品、食品、书籍等,本申请实施例对此不作具体限定,下面将都以“货物”来指代物流分拣系统的分拣对象,不再具体举例。First of all, for the application scenario of the application embodiment, the logistics sorting system provided by the embodiment of the application can be applied to the delivery of inventory products in manufacturing factories, the delivery of inventory products in retail industries, and the express delivery of e-commerce logistics. Different fields such as warehouse sorting, and the products or goods involved in transportation and sorting can be industrial parts, electronic accessories or products, medicines, clothing accessories, food, books, etc., which are not specifically limited in the embodiments of this application. All use "goods" to refer to the sorting objects of the logistics sorting system, and no specific examples will be given.
图1为本申请实施例提供的物流分拣系统的结构示意图,如图1所示,本申请实施例提供的物流分拣系统包括货架10、分拣装置、物料转运装置和货物接收装置,物料转运装置可以将货架10上的货物运送至分拣装置进行分拣,分拣后的货物可以通过货物接收装置直接打包出库或者分类形成订单再打包出库。FIG. 1 is a schematic structural diagram of a logistics sorting system provided by an embodiment of the present application. As shown in FIG. 1 , the logistics sorting system provided by an embodiment of the present application includes a
其中,该物流分拣系统按工作区域划分可以包括仓储区域、分拣区域和打包出库区域,仓储区域用于放置货架10以储存货物,分拣区域用于放置分拣装置对取出的货物进行分拣,打包出库区域为分拣后的货物按订单临时存放或者出库打包提供空间,在各个区域之间还可以设置有公共区域,公共区域可以供物料转运装置或者工作人员活动,以进行货物传递或者设备维护。Among them, the logistics sorting system can be divided into a storage area, a sorting area and a packing and outgoing area according to the working area. The sorting, packing and outgoing area provides space for the sorted goods to be temporarily stored according to the order or out of the warehouse for packaging. There can also be a public area between each area, and the public area can be used for material transfer devices or staff to carry out activities. Cargo delivery or equipment maintenance.
具体的,仓储区域的货架10可以为多个,多个货架10间隔排列,分拣装置可以为多个,且多个分拣装置在仓储区域的边缘外侧间隔分布,分拣装置包括输送组件和拣选组件,输送组件用于传送物料箱60,拣选组件设置于输送组件的侧方,拣选组件用于对输送组件上物料箱60中的货物进行分拣,料箱转运装置包括料箱搬运机器人30,料箱搬运机器人30用于将待分拣的物料箱60由货架10搬运至输送组件,在这一过程中其取出的货物放置在物料箱60中,同时料箱搬运机器人30可以接收输送组件送出的货物分拣后的物料箱60,货物接收装置可以设置于分拣装置背离货架10的一端,即分拣区域位于仓储区域和打包出库区域之间,货物接收装置用于接收拣选组件从物料箱60中取出的货物,其接收及转移货物的过程可以通过不同方式来实现。Specifically, there may be
需要说明的是,本申请提供的物流分拣系统中,料箱搬运机器人30可以往来与货架10与分拣装置之间的公共区域,并完成货物的取送任务,而料箱搬运机器人30可以直接与分拣装置对接,将待分拣的物料箱60直接运送至分拣装置,同时接受从分拣装置上传递出的物料箱60,并进入下一个作业任务,分拣装置可以持续进行货物分拣任务,从而整体提高了物流分拣系统的配送出库效率,分拣后的物料箱60中既可能存在剩余货物,也可能是没有剩余货物的空物料箱60,本实施例对此不做限定,下面将对本申请的物流分拣系统的各个工作区域的结构进行详细的说明。It should be noted that, in the logistics sorting system provided by this application, the
对于仓储区域,间隔排列的货架10之间可以具有巷道,巷道沿货架10的长度方向延伸,每个货架10可以具有多列库位,每列的库位沿货架10的高度方向排布,料箱搬运机器人30可以在巷道中移动,并按其分配到的工作任务从特定库位中取出货物。For the storage area, there may be lanes between the
作为一种可选的实施方式,多排货架10可以平行设置,且多排货架10可以形成立体仓库,即货架10的每列库位向上延伸,尽可能的利用上部空间,以提高空间利用率,料箱搬运机器人30可以对货架10上不同高度库位中的货物进行取放。As an optional embodiment, multiple rows of
可选的,货架10上的每个库位可以对应一个物料箱60,货物可以放置于物料箱60中,料箱搬运机器人30可以对物料箱60进行整体取放。Optionally, each location on the
可选的,料箱搬运机器人30可以包括移动底座,移动底座上可以设置有升降机构,升降机构可以沿其高度方向移动,而移动到不同高度可以对应货架10上不同高度的库位,升降机构上可以设置有可伸缩的机器臂,机械臂的末端可以设置有夹持结构。在料箱搬运机器人30的工作过程中,可以先进入指定的巷道中并移动至对应的库位列,升降机构移动至对应高度的库位,其后机械臂可以伸出,将物料箱60夹持并托出。Optionally, the
在另一种料箱搬运机器人30的取放货物的方式中,料箱搬运机器人30可以与货架10进行对接并沿货架10的高度方向进行攀爬,而到达相应高度的库位后对物料箱60进行取放,其后再沿货架10高度方向向下移动并返回地面。In another way of picking and placing goods by the
本申请实施例的物流分拣系统对料箱搬运机器人30的具体结构及工作方式不做限定,实际可以根据应用场景和空间大小进行选择。The specific structure and working mode of the
需要说明的是,货架10上的多个库位既可以是固定库位也可以是动态库位,也可以是固定库位和动态库位的组合,当采用动态库位时,相应的库位可以根据是否存放有货物或物料箱60来确认并调整库位的空间大小,并且可以根据实际物流系统运作过程中需要存储的物料箱60或货物的大小,选择合适空间的库位,并对在料箱搬运机器人30取放后对库位空间进行重新界定。货架10库位的具体大小和变化方式可以根据实际应用场景和工作流程进行选择设定,本申请实施例对此不做具体限定。It should be noted that the multiple storage locations on the
对于分拣区域,在分拣区域可以设置有分拣装置,分拣装置需要与料箱搬运机器人30的工作任务进行配合,对搬运机器人送入的物料箱60中的货物进行分拣,同时分拣传送效率需要与搬运机器人的任务规划相配合,避免出现物料箱60对接卡死的情况,而分拣装置中包括有输送组件和拣选组件,分别对物料箱60进行传送以及对物料箱60中的货物进行分拣,下面将对两者的结构和配合方式进行详细说明。For the sorting area, a sorting device can be installed in the sorting area. The sorting device needs to cooperate with the work task of the material
作为一种可选的实施方式,输送组件可以包括第一输送线21,第一输送线21具有入口211和出口212,料箱搬运机器人30与入口211对接可以将待分拣的物料箱60放置到第一输送线21上,而入口211和出口212分别位于第一输送线21的两端,从而物料箱60可以从第一输送线21的一端进入输送组件,并由输送组件的另一端离开,搬运机器人相应的可以与出口212对接将货物分拣完后的物料箱60取回。As an optional embodiment, the conveying assembly may include a first conveying
物料箱60在第一输送线21上可以沿第一输送线21的长度方向移动,第一输送线21的延伸结构可以根据实际场地空间大小,以及货架10、公共区域等其他布局需求进行设计,具体的,第一输送线21的形状可以为直线型、环形、U形、W形等,物料箱60在第一输送线21上单向移动,均可以由入口211到达出口212,本申请实施例对第一输送线21的具体形状和结构不做具体限定。The
可选的,为了保证空间规划合理性,便于料箱搬运机器人30对物料箱60进行取放,第一输送线21的入口211和出口212可以位于第一输送线21的同一侧,此时,第一输送线21可以采用环形、U形等形状,料箱搬运机器人30从入口211放入物料箱60,并从出口212接收物料箱60,从而料箱搬运机器人30可以在第一输送线21的同一侧接放物料箱60,减短料箱搬运机器人30的移动路径,同时在分配料箱搬运机器人30的工作任务时可以降低其路径规划难度。Optionally, in order to ensure the rationality of space planning and facilitate the material
在实际的应用场景中,为了提高物料分拣效率,可以有多个物流分拣线进行分拣,即第一输送线21可以为多个,且多个第一输送线21可以分成至少两个输送线组,每个输送线组包括至少两个第一输送线21,相应的,拣选组件可以为多个,每个输送线组对应一个拣选组件,从而一个拣选组件可以对多条第一输送线21进行分拣。In practical application scenarios, in order to improve the material sorting efficiency, there may be multiple logistics sorting lines for sorting, that is, there may be multiple first conveying
图2为本申请实施例提供的物流分拣系统中第一输送线组的结构示意图,如图2所示,输送线组可以包括第一输送线组20a,拣选组件可以包括分拣机器人23和人工分拣台24,分拣机器人23和人工分拣台24可以位于第一输送线21的不同侧,从而可以通过分拣机器人23和人工的配合同时进行货物分拣,提高货物分拣的效率。FIG. 2 is a schematic structural diagram of a first conveying line group in a logistics sorting system provided by an embodiment of the present application. As shown in FIG. 2 , the conveying line group may include a first conveying
分拣工作人员可以在人工分拣台24对物料箱60中的货物进行分拣,而每条第一输送线21都可以由分拣机器人23和人工进行配合,或者可以设置有多个分拣机器人23,其中,由于物料箱60在第一输送线21上沿单行传送,分拣机器人23和人工分拣台24可以与第一输送线21的不同传送段对应设置。The sorting staff can sort the goods in the
需要说明的是,由于货物的分拣需要一定的时间,物料箱60在第一输送线21上可以以一个恒定速度进行运行,在物料箱60移动过程中,分拣机器人23和人工进行货物分拣;也可以是物料箱60移动相应的分拣位时,第一输送线21停止传送,分拣完成后,第一输送线21再继续传送物料箱60,而物料箱60的传送过程可以具有较快的移动速度,本申请实施例对物料箱60在第一输送线21上的实际拣选流程不做具体限定。It should be noted that, since the sorting of the goods takes a certain time, the
此外,在第一输送线组20a中,第一输送线21可以间隔设置,分拣机器人23可以设置于两个相邻的第一输送线21之间,从而分拣机器人23可以对两个第一输送线21上的物料箱60中货物分别进行分拣,从而充分利用分拣机器人23的工作效率。In addition, in the first conveying
示例性的,分拣机器人23可以为机械臂,机械臂的工作半径大于相邻两个第一输送线21之间间距的一半,从而使得机械臂的工作范围可以同时覆盖其两侧的第一输送线21,机械臂对应的分拣位可以设置在机械臂工作范围内的任意一个或多个位置,机械臂的末端可以设置有识别单元和夹持单元,识别单元可以对物料箱60中的货物进行识别,从而判断该货物所属的订单或订单集,以及可以判断该货物是否需要直接打包出库,夹持单元可以将货物从物料箱60中夹出。本申请实施例对分拣机器人23的具体结构以及取货方式不做具体限定。Exemplarily, the sorting robot 23 may be a robotic arm, and the working radius of the robotic arm is greater than half of the distance between two adjacent first conveying
图3为本申请实施例提供的物流分拣系统中第二输送线组的结构示意图,如图3所示,除了第一输送线组20a外,在本申请实施例中,输送线组还可以包括第二输送线组20b,而拣选组件可以包括至少两个人工分拣台24,人工分拣台24与第一输送线21一一对应设置,从而对不同第一输送线21上物料箱60中的货物分别进行分拣,且第二输送线组中的任意两条输送线的输送方向可以相同,也可以相反,在此不做限定。FIG. 3 is a schematic structural diagram of the second conveying line group in the logistics sorting system provided by the embodiment of the present application. As shown in FIG. 3 , in addition to the first conveying
第二输送线组20b和第一输送线组20a的区别在于,第一输送线组20a有拣选机器人完成拣选工作,或者由拣选机器人和人工配合完成拣选工作,而第二输送线组20b可以通过设置多个人工分拣台24,对第一输送线21上的物料箱60进行分拣。The difference between the second conveying
需要说明的是,本申请实施例中可以同时设置有第一输送线组20a和第二输送线组20b,并根据不同货物类型和出库任务要求分别进行拣选工作,从而提高整个物流分拣系统的工作流程的柔性,在工作任务发生临时变化或者部分设备故障时,可以保证物流分拣工作持续进行。It should be noted that, in the embodiment of the present application, the first conveying
上述的第一输送线21在传输物料箱60过程中,物料箱60沿第一输送线21的延伸方向单向移动,料箱搬运机器人30在第一输送线21的两端分别放入和接收物料箱60,本申请实施例中,输送组件还可以包括第二输送线22,第二输送线22与第一输送线21具有不同的结构和物料箱60传送方式,从而可以使用不同场地规划的需求,下面将对第二输送线22的具体结构详细说明。During the process of transferring the
图4为本申请实施例提供的物流分拣系统中第二输送线的结构示意图,图5为本申请实施例提供的物流分拣系统中第二输送线第二端的结构示意图,如图4和图5所示,第二输送线22可以包括上层输送线221和下层输送线222,上层输送线221和下层输送线222沿相同方向延伸且上下重叠设置,且上层输送线221和下层输送线222两者中的一者传送待分拣的物料箱60,另一者传送货物分拣后的物料箱60,从而可以减少第二输送线22所占用的空间,提高空间利用率,物料箱60在其中一者上完成分拣作业后可以换向至另一者返回。4 is a schematic structural diagram of the second conveyor line in the logistics sorting system provided by the embodiment of the application, and FIG. 5 is a schematic structural diagram of the second end of the second conveyor line in the logistics sorting system provided by the embodiment of the application, as shown in FIG. 4 and As shown in FIG. 5 , the second conveying
具体的,上层输送线221和下层输送线222均水平设置,待分拣的物料箱60可以在其中一层上完成分拣,而货物分拣后的物料箱60可以由另一层返回等待接收的料箱搬运机器人30,上层输送线221与下层输送线222之间具有一定的间隔,从而为物料箱60在下层输送线222上的移动提供容纳空间。Specifically, the upper conveying
可选的,物料箱60在上层输送线221和下层输送线222上沿相反方向移动,从而物料箱60可以在第二输送线22上沿一个方向进行货物拣选,而拣选完成后的物料箱60可以沿相反方向返回,且在第二输送线22长度方向上间隔设置有多个拣货组件,从而对物料箱60内的货物持续进行分拣作业。Optionally, the
需要说明的是,上层输送线221可以设置为传送待分拣的物料箱60,相应的,下层输送线222可以设置为传送货物分拣后的物料箱60;或者,下层输送线222可以设置为传送待分拣的物料箱60,相应的,上层输送线221可以设置为传送货物分拣后的物料箱60。下面将以前者为例进行说明。It should be noted that the upper conveying
作为一种可选的实施方式,第二输送线22的第一端同时设置有上层输送线221的入货口和下层输送线222的出货口,第二输送线22的第二端同时设置有上层输送线221的出货口和下层输送线222的入货口,料箱搬运机器人30与第二输送线22的第一端对接,从而料箱搬运机器人30可以在上层输送线221的入货口放入待分拣的物料箱60,物料箱60沿上层输送线221移动并在这一过程中进行货物分拣,其后分拣完的物料箱60由上层输送线221的出货口进入下层输送线222的入货口,并沿下层输送线222移动,最后物料箱60沿下层输送线222返回第二输送线22的第一端,并从下层输送线222的出货口被料箱搬运机器人30接收,而料箱搬运机器人30可以在相同的位置接放物料箱60。As an optional embodiment, the first end of the second conveying
可选的,上层输送线221包括主输送段2211和至少一个分拣输送段2212,分拣输送段2212的两端分别与主输送段2211延伸方向的不同位置连接,分拣输送段2212用于在主输送段2211的一侧形成分拣位,拣选组件可以与分拣位相对设置,在待分拣的物料箱60经过上层输送线221时,可以根据多个分拣位的分拣速度,和/或,主输送段2211与至少一个分拣输送段2212两者之间的输送速度,确定物料箱60对应的分拣位,到达相应分拣位后可以先由主输送段2211进入分拣输送段2212上完成货物分拣,其后再回到主输送段2211上。Optionally, the upper conveying
为了实现物料箱60从上层输送线221至下层输送线222的转换,第二输送线22的第二端可以设置有对接结构,对接结构用于将位于上层输送线221的物料箱60自动转运至下层输送线222,从而物料箱60可以在上层输送线221进行货物分拣,其后物料箱60可以通过对接结构在第二输送线22的第二端转移至下层输送线222,并由下层输送线222返回。对接结构可以有多种实现方式,下面将分别进行举例说明。In order to realize the conversion of the
作为其中一种可选的实施方式,对接结构可以包括升降机构,升降机构包括升降平台,升降平台可沿第二输送线22的高度方向移动,且在移动行程的两端分别与上层输送线221和下层输送线222对接,物料箱60在第二输送线22的第二端可以转移至升降平台上。As an optional embodiment, the docking structure may include a lifting mechanism, the lifting mechanism includes a lifting platform, the lifting platform can move along the height direction of the second conveying
具体的,升降平台与上层输送线221对接时,分拣后的物料箱60可以从上层输送线221的出货段移动至升降平台上,其后,升降平台可以向下移动至与下层输送线222对接,从而可以将物料箱60由上层输送线221转移至下层输送线222。Specifically, when the lifting platform is docked with the upper conveying
可选的,升降机构还可以包括齿轮、链条和电机,升降平台可以通过链条进行带动进行升降,齿轮与链条啮合,且电机可以驱动齿轮转动,通过控制电机的正反转可以实现链条的往复移动,从而实现升降平台的上下移动。Optionally, the lifting mechanism may also include a gear, a chain and a motor. The lifting platform can be driven by the chain to lift and lower, the gear is meshed with the chain, and the motor can drive the gear to rotate, and the reciprocating movement of the chain can be realized by controlling the forward and reverse rotation of the motor. , so as to realize the up and down movement of the lifting platform.
作为另一种可选的实施方式,对接结构可以包括坡度转向机构223,坡度转向机构223包括承载件2231,承载件2231可以为平板件,承载件2231用于承接物料箱60,承载件2231可相对于第二输送线22的第二端转动,以将物料箱60由上层输送线221转移至下层输送线222。As another optional embodiment, the docking structure may include a
具体的,坡度转向机构223还可以包括安装柱2232,承载件2231的第一端与安装柱2232转动连接,承载件2231的第二端为自由端,在转动行程的两端,承载件2231的第二端可以分别与上层输送线221和下层输送线222对接,当物料箱60移动至承载件2231上时,承载件2231可以由上层输送线221的端部向下层输送线222转动,从而实现物料箱60的转移。Specifically, the
可选的,安装柱2232与承载件2231连接位置的高度位于上层输送线221与下层输送线222之间,即高于下层输送线222的高度且低于上层输送线221的高度,如此设置,当承载件2231的第二端与上层输送线221对接时,可以形成由承载件2231第二端向第一端倾斜的坡度,则物料箱60可以沿坡度滑移至承载件2231上;相应的,当承载件2231的第二端与下层输送线222对接时,可以形成由承载件2231第一端向第二端倾斜的坡度,物料箱60可以沿坡度由承载件2231滑移至下层输送线222上。Optionally, the height of the connection position between the mounting
此外,在承载件2231的第一端还可以设置有挡板,当物料箱60滑移至承载件2231上时,挡板可以对物料箱60进行限位。In addition, a baffle plate may also be provided at the first end of the
可选的,坡度转向机构223还可以包括驱动单元,驱动单元可以为电机,承载件2231的第一端可以与驱动单元的输出端连接,且承载件2231可以在驱动单元的驱动下转动,而承载件2231的转动行程可以通过上下两个分别设置的行程开关进行控制,即在承载件2231转动至与上层输送线221对接时会触碰到一个行程开关从而停止转动并维持对接状态,而转动至与下层输送线222对接时会触碰到另一个行程开关从而停止转动并维持对接状态。当然,行程开关还可以是非接触式的光电传感器,本实施例对此不做具体限定。Optionally, the
在承载件2231上还可以设置料箱检测传感器,以判断承载件2231上是否有料箱60,从而判断承载件2231是否需要在与上层输送线221和下层输送线222的对接状态之间切换,其中,料箱检测传感器可以为压力传感器,通过检测物料箱60的负重以判断料箱60是否移动至承载件2231上或者是否从承载件2231上滑出;或者,料箱检测传感器可以为触点开关或光电开关等位置传感器,通过检测物料箱60的位置来判断承载件2231上是否有物料箱60。A material box detection sensor can also be provided on the
在完成货物的分拣后,需要对分拣后的货物进行打包出库,或者当一个订单包含多个货物,亦或是一个订单集包含多个订单时,需要对货物进行分类和临时存放,因此本申请提供的物流分拣系统通过货物接收装置实现上述功能,下面将对此进行说明。After the sorting of the goods is completed, the sorted goods need to be packaged out of the warehouse, or when an order contains multiple goods, or an order set contains multiple orders, the goods need to be classified and temporarily stored. Therefore, the logistics sorting system provided by the present application realizes the above functions through the cargo receiving device, which will be described below.
作为一种可选的实施方式,货物接收装置可以包括至少一个货物输送线40,货物输送线40与输送组件相对设置,货物输送线40的出货口与包装平台70对接,从而分拣后的货物可以沿货物输送线40移动至包装平台70直接打包出库。As an optional embodiment, the goods receiving device may include at least one
或者,本实施例提供的物流分拣系统还可以包括货物分类盒50,货物分类盒50可以有多个,且依次排列,货物分类盒50可以包括多个容纳腔,容纳腔用于存放属于一个订单或一个订单集的货物。货物接收装置还可以包括货物搬运机器人41,货物搬运机器人41用于将货物运送至容纳腔内,从而将同一订单的货物放置在同一容纳腔中,其后集中出库。Alternatively, the logistics sorting system provided in this embodiment may further include a
作为一种可选的实施方式,拣选组件的一侧可以设置有等待位,等待位用于货物搬运机器人41等待接收货物。在实际进行拣选任务时,货物搬运机器人41根据订单要求,可能需要一次运送多个货物,而多个货物需要从不同的物料箱60中拣选取出,因此货物搬运机器人41可以在等待位等待相应的货物拣选,而不对其他货物拣选和运送任务产生干涉,提高了整体的物流效率。As an optional embodiment, one side of the picking assembly may be provided with a waiting position, and the waiting position is used for the
示例性的,货物搬运机器人41可以为翻斗机器人,翻斗机器人包括本体和设置在本体顶部的收纳盒,收纳盒可以相对于本体翻转从而将收纳盒中的货物倒出,翻斗机器人可以在输送组件的一侧接收货物,其后移动至相应分类盒位置,将货物翻入容纳腔中。Exemplarily, the
需要说明的是,本实施例中的料箱搬运机器人30和货物搬运机器人41均可以为无轨机器人,且可以根据控制中心的统一调度和路径规划进行配送任务,本申请对料箱搬运机器人30和货物搬运机器人41的具体移动方式、调度方式以及路径规划方法均不做具体限定。It should be noted that both the
图6为本申请实施例提供的物流分拣系统中料箱搬运机器人的结构示意图,示例性的,料箱搬运机器人30的移动底座上可以设置有沿高度方向间隔设置的多层货板,每层货板均可放置物料箱60,从而料箱搬运机器人30可同时运输多个物料箱60,提高料箱搬运机器人30单次工作的效率。6 is a schematic structural diagram of a container handling robot in a logistics sorting system provided by an embodiment of the present application. Exemplarily, the moving base of the
作为一种可选的实施方式,本申请提供的物流分拣系统中,不同的分拣装置可以采用上述不同结构及工作方式的输送组件与拣选组件的组合,且根据实际的应用场景,可以对具体的拣选装置的排布结构,以及包括的输送组件和拣选组件的数量进行选择,提高物流分拣的效率,同时可以适应不同应用场景的需求。As an optional implementation manner, in the logistics sorting system provided by this application, different sorting devices can adopt the combination of the above-mentioned conveying components and sorting components with different structures and working modes, and according to the actual application scenario, can The specific arrangement structure of the sorting device, as well as the number of conveying components and picking components included, can improve the efficiency of logistics sorting and can adapt to the needs of different application scenarios.
本实施例提供的物流分拣系统包括货架、分拣装置、物料转运装置和货物接收装置,货架可以为多个,多个货架间隔排列形成仓储区域,分拣装置为多个,且多个分拣装置在仓储区域的边缘外侧间隔分布,分拣装置包括输送组件和拣选组件,输送组件用于传送物料箱,拣选组件设置于输送组件的侧方,拣选组件用于对输送组件上物料箱中的货物进行分拣,料箱转运装置包括料箱搬运机器人,料箱搬运机器人用于将待分拣的物料箱由货架搬运至输送组件,并接收输送组件送出的货物分拣后的物料箱,货物接收装置设置于分拣装置背离货架的一端,货物接收装置用于接收拣选组件从物料箱中取出的货物,从而将货物按订单进行分类或者直接出库,分拣装置可以持续进行货物分拣任务,整体提高物流分拣系统的配送出库效率。The logistics sorting system provided in this embodiment includes a rack, a sorting device, a material transfer device, and a cargo receiving device. There may be multiple racks, and the multiple racks are arranged at intervals to form a storage area. There are multiple sorting devices, and the multiple sorting devices The picking devices are distributed at intervals outside the edge of the storage area. The sorting device includes a conveying component and a picking component. The conveying component is used to transfer the material box. The picking component is arranged on the side of the conveying component. The material box transfer device includes a material box handling robot. The material box handling robot is used to transport the material boxes to be sorted from the shelves to the conveying components, and receive the sorted material boxes sent by the conveying components. The cargo receiving device is arranged at the end of the sorting device away from the shelf. The cargo receiving device is used to receive the goods taken out from the material box by the picking component, so as to sort the goods according to the order or directly leave the warehouse. The sorting device can continuously sort the goods. task, and improve the overall efficiency of the distribution and delivery of the logistics sorting system.
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的范围。Finally, it should be noted that the above embodiments are only used to illustrate the technical solutions of the present utility model, but not to limit them; although the present utility model has been described in detail with reference to the foregoing embodiments, those of ordinary skill in the art should understand that : it can still modify the technical solutions recorded in the foregoing embodiments, or perform equivalent replacements on some or all of the technical features; and these modifications or replacements do not make the essence of the corresponding technical solutions deviate from the technology of the embodiments of the present invention scope of the programme.
Claims (20)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122923619.8UCN216352391U (en) | 2021-03-31 | 2021-03-31 | Logistics sorting system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122923619.8UCN216352391U (en) | 2021-03-31 | 2021-03-31 | Logistics sorting system |
| CN202120678289.8UCN214410068U (en) | 2021-03-31 | 2021-03-31 | Logistics sorting system |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202120678289.8UDivisionCN214410068U (en) | 2021-03-31 | 2021-03-31 | Logistics sorting system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN216352391Utrue CN216352391U (en) | 2022-04-19 |
Family
ID=78031262
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202120678289.8UActiveCN214410068U (en) | 2021-03-31 | 2021-03-31 | Logistics sorting system |
| CN202122923619.8UActiveCN216352391U (en) | 2021-03-31 | 2021-03-31 | Logistics sorting system |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202120678289.8UActiveCN214410068U (en) | 2021-03-31 | 2021-03-31 | Logistics sorting system |
Country Status (3)
| Country | Link |
|---|---|
| CN (2) | CN214410068U (en) |
| TW (1) | TWM632560U (en) |
| WO (1) | WO2022206420A1 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114887904A (en)* | 2022-04-28 | 2022-08-12 | 浙江凯乐士科技集团股份有限公司 | Sorting system |
| CN115848930A (en)* | 2022-12-21 | 2023-03-28 | 珠海格力智能装备有限公司 | Storage system and optical fiber finished product production line |
| CN118479184A (en)* | 2024-07-16 | 2024-08-13 | 北京木仓花科技有限公司 | A picking system for a stereoscopic warehouse based on an intelligent robot and a control method thereof |
| CN120288409A (en)* | 2025-06-12 | 2025-07-11 | 宁波财经学院 | An intelligent warehousing system based on e-commerce |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN214410068U (en)* | 2021-03-31 | 2021-10-15 | 深圳市海柔创新科技有限公司 | Logistics sorting system |
| CN114210589B (en)* | 2021-11-01 | 2024-03-15 | 中国工商银行股份有限公司保定分行 | Automatic sorting system of intelligent vault |
| CN216425638U (en)* | 2021-11-09 | 2022-05-03 | 深圳市海柔创新科技有限公司 | Warehousing system |
| CN115156068A (en)* | 2022-06-30 | 2022-10-11 | 深圳市海柔创新科技有限公司 | Sorting platform, sorting system and sorting method |
| CN115231184B (en)* | 2022-09-02 | 2023-11-10 | 深圳市海柔创新科技有限公司 | Warehousing workstation and warehousing system |
| CN117944269A (en)* | 2023-12-29 | 2024-04-30 | 上海普利生三维科技有限公司 | Household system for three-dimensional printing |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010052878A (en)* | 2008-08-27 | 2010-03-11 | Murata Machinery Ltd | Picking system |
| KR20190046212A (en)* | 2017-10-25 | 2019-05-07 | 씨제이대한통운 (주) | Logistics transport system Using a Picking Robot |
| CN111731731A (en)* | 2019-11-19 | 2020-10-02 | 北京京东乾石科技有限公司 | case picking system |
| CN214410068U (en)* | 2021-03-31 | 2021-10-15 | 深圳市海柔创新科技有限公司 | Logistics sorting system |
- 2021
- 2021-03-31CNCN202120678289.8Upatent/CN214410068U/enactiveActive
- 2021-03-31CNCN202122923619.8Upatent/CN216352391U/enactiveActive
- 2022
- 2022-03-17WOPCT/CN2022/081553patent/WO2022206420A1/ennot_activeCeased
- 2022-03-30TWTW111203185Upatent/TWM632560U/enunknown
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114887904A (en)* | 2022-04-28 | 2022-08-12 | 浙江凯乐士科技集团股份有限公司 | Sorting system |
| CN115848930A (en)* | 2022-12-21 | 2023-03-28 | 珠海格力智能装备有限公司 | Storage system and optical fiber finished product production line |
| CN118479184A (en)* | 2024-07-16 | 2024-08-13 | 北京木仓花科技有限公司 | A picking system for a stereoscopic warehouse based on an intelligent robot and a control method thereof |
| CN120288409A (en)* | 2025-06-12 | 2025-07-11 | 宁波财经学院 | An intelligent warehousing system based on e-commerce |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022206420A1 (en) | 2022-10-06 |
| CN214410068U (en) | 2021-10-15 |
| TWM632560U (en) | 2022-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN216352391U (en) | Logistics sorting system | |
| US12122611B2 (en) | Pickface builder for storage and retrieval systems | |
| US8276739B2 (en) | Three-dimensional automated pick module | |
| US20150239665A1 (en) | Multilevel vertical conveyor platform guides | |
| EP2436619A2 (en) | Vertical conveyor system | |
| CN111960015B (en) | Warehousing system, goods shelving method and goods sorting method | |
| CN110525870A (en) | A kind of multiple layer tray formula tiered warehouse facility module and tiered warehouse facility | |
| CN112758577B (en) | Multi-station storage, picking and stacking conveyor and stacking method | |
| CN117019651A (en) | Sorting system, logistics system and sorting system control method | |
| CN114435829A (en) | Transfer robot | |
| CN118205846A (en) | Stacked bin picking system, picking robot and method | |
| CN117622749A (en) | Warehousing system, warehouse, warehousing system control method and storage medium | |
| CN117566298A (en) | Logistics system, logistics system control method and storage medium | |
| JP2018154479A (en) | Multi-tier automatic warehouse | |
| CN215709078U (en) | Stacker, transportation system and storage system | |
| CN221820922U (en) | Stacking bin picking system and picking robot | |
| CN214670713U (en) | Sorting device and logistics sorting system | |
| CN110482265B (en) | Loading system and method | |
| CN215853255U (en) | Material box transfer system | |
| CN218056910U (en) | Sorting workstation and sorting system | |
| CN218506742U (en) | Cargo transportation system and warehousing system | |
| CN117098713A (en) | Object handling system and method including a pallet positionable mobile carrier | |
| CN115818071A (en) | Material box transfer system | |
| JPH01275309A (en) | Picking method and apparatus | |
| CN114056817A (en) | Storage and sorting integrated equipment and method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |