CN202728574U - Composite aircraft with fixed wing and electric multiple propellers combined and with helicopter function - Google Patents
Composite aircraft with fixed wing and electric multiple propellers combined and with helicopter functionDownload PDFInfo
- Publication number
- CN202728574U CN202728574UCN 201120397882CN201120397882UCN202728574UCN 202728574 UCN202728574 UCN 202728574UCN 201120397882CN201120397882CN 201120397882CN 201120397882 UCN201120397882 UCN 201120397882UCN 202728574 UCN202728574 UCN 202728574U
- Authority
- CN
- China
- Prior art keywords
- wing
- aircraft
- fixed
- helicopter
- oar
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 239000002131composite materialSubstances0.000titleclaimsabstractdescription19
- 238000000034methodMethods0.000claimsdescription17
- 230000008569processEffects0.000claimsdescription12
- 230000005484gravityEffects0.000claimsdescription10
- 238000006243chemical reactionMethods0.000claimsdescription8
- 239000000203mixtureSubstances0.000claimsdescription8
- 238000009434installationMethods0.000claimsdescription2
- 239000000446fuelSubstances0.000claims1
- 238000010586diagramMethods0.000description5
- 230000007423decreaseEffects0.000description4
- 230000008859changeEffects0.000description3
- 238000007664blowingMethods0.000description2
- 150000001875compoundsChemical class0.000description2
- 230000007246mechanismEffects0.000description2
- 230000004048modificationEffects0.000description2
- 238000012986modificationMethods0.000description2
- 230000007704transitionEffects0.000description2
- 241000238633OdonataSpecies0.000description1
- 230000001174ascending effectEffects0.000description1
- 230000003247decreasing effectEffects0.000description1
- 230000007547defectEffects0.000description1
- 230000000694effectsEffects0.000description1
- 238000005265energy consumptionMethods0.000description1
- 238000005516engineering processMethods0.000description1
- 238000004519manufacturing processMethods0.000description1
- 230000000750progressive effectEffects0.000description1
- 239000007921spraySubstances0.000description1
- 230000003068static effectEffects0.000description1
- 239000000725suspensionSubstances0.000description1
- 230000001360synchronised effectEffects0.000description1
- 230000004584weight gainEffects0.000description1
- 235000019786weight gainNutrition0.000description1
Images







Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C29/00—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft
- B64C29/0008—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded
- B64C29/0016—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by free or ducted propellers or by blowers
- B64C29/0025—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by free or ducted propellers or by blowers the propellers being fixed relative to the fuselage
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Toys (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本实用新型涉及一种飞行器,特别是涉及一种固定翼与电动多桨组成的具有直升机功能的复合飞行器。The utility model relates to an aircraft, in particular to a composite aircraft composed of fixed wings and electric multiple propellers with the function of a helicopter.
背景技术Background technique
在航空领域常见的固定翼飞机,由于主要靠机翼产生升力平衡飞机重量,动力系统主要用来克服飞机飞行阻力,因此远小于飞机重量的动力(推拉力)就可以让固定翼飞机离地升空。其飞行速度快,航程和巡航时间长,但起降距离长,要求高质量的跑道,严重影响和妨碍了固定翼飞机在偏远无专用机场地区的应用。The common fixed-wing aircraft in the aviation field mainly rely on the wings to generate lift to balance the weight of the aircraft, and the power system is mainly used to overcome the flight resistance of the aircraft. Therefore, the power (push-pull force) far smaller than the weight of the aircraft can make the fixed-wing aircraft lift off the ground. null. Its flight speed is fast, the range and cruising time are long, but the take-off and landing distance is long, requiring high-quality runways, which seriously affects and hinders the application of fixed-wing aircraft in remote areas without dedicated airports.
在航空领域常见的旋翼直升机,可以解决在狭小场地垂直起降的问题。在已知的旋翼飞行器中,除了常见的单桨直升机以外,还有多桨直升机,多桨直升机一般是通过变化桨的转速来改变飞行姿态的。如4桨旋翼直升机,4个桨相对于中心对称放置,其中有2个桨是顺时针旋转,还有2个桨是逆时针方向旋转。当飞机需要往一个方向转向时,只要改变增加其中2个顺时针/逆时针桨的转速,减少另外2个逆时针/顺时针桨的转速就可以改变航向。需要倾斜飞行时,只要减小飞行方向上的桨的转速,增加对称位置的桨的转速就能通过升力差向指定的方向飞行。Rotary-wing helicopters, which are common in the aviation field, can solve the problem of vertical take-off and landing in small places. In the known rotorcraft, in addition to common single-blade helicopters, there are also multi-blade helicopters, and the multi-blade helicopters generally change the flight attitude by changing the rotational speed of the paddles. For example, in a 4-blade rotor helicopter, the 4 paddles are placed symmetrically with respect to the center, of which 2 paddles rotate clockwise and 2 paddles rotate counterclockwise. When the aircraft needs to turn in one direction, just increase the speed of two clockwise/counterclockwise propellers and decrease the speed of the other two anticlockwise/clockwise propellers to change the direction. When it is necessary to tilt the flight, as long as the rotating speed of the propeller in the flying direction is reduced, the rotating speed of the propeller at a symmetrical position can be increased to fly in the specified direction through the lift difference.
但直接和动力系统相连的旋翼效率远不如固定翼飞机的机翼,因此功耗大。又因其前进速度主要靠旋翼桨盘通过倾斜盘的倾斜产生的分力提供,同时直升机前进飞行的阻力也较固定翼飞机大的多。因此其飞行速度,距离和续航时间都不如固定翼飞机。为此航空领域的技术人员一直在找寻能兼有固定翼飞机和直升机优点的飞行器。However, the efficiency of the rotor directly connected to the power system is far inferior to that of a fixed-wing aircraft, so the power consumption is large. Because the forward speed is mainly provided by the component force produced by the tilt of the rotor paddle through the swash plate, the resistance of the forward flight of the helicopter is also much larger than that of the fixed-wing aircraft. Therefore, its flight speed, distance and endurance are not as good as fixed-wing aircraft. For this reason, those skilled in the aviation field are looking for the aircraft that can have both fixed-wing aircraft and helicopter advantages.
单独的升力发动机在设计上简单,升力发动机在巡航时不工作,又占用机内体积,这是死重。减少或消除死重是垂直起落飞机一个急需解决的问题。将升力和巡航发动机合二为一,当然就消除了专用升力发动机的死重。巡航和升力发动机合二为一的最直接的方法,莫过于倾转喷气发动机,把发动机直接对着地面吹,当然就产生直接的升力。这么简单的道理,为什么不是垂直起落飞机的首选呢?首先,倾转发动机对发动机在飞机上的位置带来很大的限制,不光机翼、发动机的位置必须和飞机的重心一致,也基本上只有翼下或翼尖位置,这样,一旦部分升力发动机故障或瞬时出力不足,非对称升力容易引起灾难性的事故。倾转旋翼用同步轴解决这个问题,倾转喷气发动机就基本不可能在一侧发动机失效时,由另一侧发动机补偿。再说,发动机本身十分沉重,倾转机构谈何容易。还有,发动机对进气的要求很高,否则发动机效率直线下降,但发动机在倾转过程中,进气的条件很难保证。另外,垂直起落要求在短时间内产生大量的推力,巡航要求工作时间长但推力远远要不了那么多,两者之间在设计上很难协调。由发动机直接产生升力,没法取巧。从极端情况来说,滑跑起飞、用机翼产生升力,只需要很少的推力;但用喷气动力垂直起飞,至少需要1∶1的推重比,动力要求高得多。The independent lift engine is simple in design, and the lift engine does not work when cruising, and it takes up the volume inside the machine, which is dead weight. Reducing or eliminating dead weight is an urgent problem for VTOL aircraft. Combining the lift and cruise engines into one naturally eliminates the dead weight of the dedicated lift engine. The most direct method of merging cruise and lift engines into one is to tilt the jet engine and blow the engine directly to the ground, of course it will produce direct lift. For such a simple reason, why is it not the first choice for vertical take-off and landing aircraft? First of all, tilting the engine places great restrictions on the position of the engine on the aircraft. Not only the position of the wings and the engine must be consistent with the center of gravity of the aircraft, but basically only the position under the wing or at the tip of the wing. In this way, once the partial lift engine fails Or the instantaneous output is insufficient, and the asymmetrical lift is likely to cause catastrophic accidents. The tiltrotor solves this problem with a synchronous shaft, and it is basically impossible for the tiltjet engine to be compensated by the engine on the other side when the engine on one side fails. Besides, the engine itself is very heavy, and the tilting mechanism is easier said than done. Also, the engine has very high requirements on the air intake, otherwise the engine efficiency will plummet, but it is difficult to guarantee the air intake conditions during the engine tilting process. In addition, vertical take-off and landing requires a large amount of thrust to be generated in a short period of time, while cruising requires a long working time but far less thrust. It is difficult to coordinate the design of the two. The lift is directly generated by the engine, so there is no trick. From an extreme point of view, only a small amount of thrust is needed to take off by taxiing and generate lift with the wings; but to take off vertically with jet power, at least a 1:1 thrust-to-weight ratio is required, and the power requirement is much higher.
在已知的具有可垂直起降功能且有固定翼飞机功能的飞行器中,大致分为以下几类。一、如图1,将涵道风扇和前行桨叶11结合起来的方案。如西科斯基的无人机Mariner,通用公司的XV-5等。这种飞行器的缺点是涵道增加了较重的重量,增加较多的迎风阻力,同时妨碍了机内载荷和设备的布置,或者减小了机翼的有效升力面积。Known aircraft with vertical take-off and landing functions and fixed-wing aircraft functions can be roughly divided into the following categories. 1. As shown in Figure 1, the scheme of combining the ducted fan and the forward blade 11. Such as Sikorsky's UAV Mariner, General Motors' XV-5 and so on. The shortcoming of this aircraft is that duct increases heavier weight, increases more windward resistance, hinders the arrangement of load and equipment in the machine simultaneously, or reduces the effective lift area of wing.
二、倾转动力实现垂直起降的固定翼飞机。如图2中的V22等,其中螺旋桨为12。这类飞机在起飞时动力装置的推(拉)力垂直地面使飞机垂直离地,然后在空中逐渐使动力装置的推(拉)力,转向飞机前进方向,使飞机像常规固定翼飞机一样向前飞行。但其转向机构复杂,造价贵,可靠性差,特别动力系统转向时的(飞机无前进速度时)安定性和操纵性,一直是困扰航空技术人员的难题。Two, tilting power realizes the fixed-wing aircraft of vertical take-off and landing. V22 etc. in Fig. 2, wherein propeller is 12. When this type of aircraft takes off, the push (pull) force of the power unit is vertical to the ground to make the aircraft vertically lift off the ground, and then the push (pull) force of the power unit is gradually turned to the forward direction of the aircraft in the air, so that the aircraft moves forward like a conventional fixed-wing aircraft. before flight. But its steering mechanism is complex, expensive, poor reliability, stability and maneuverability (when the aircraft has no forward speed) when the special power system turns, has always been a difficult problem for aviation technicians.
三、旋翼机翼共用飞机。如图3a-3c中波音公司的“蜻蜓”飞机。这类飞机机翼13可以变为旋翼使用,可以实现垂直起降。和倾转动力飞行器一样,也存在结构复杂,造价贵,可靠性差等问题。Three, rotor wing shared aircraft. Boeing's "Dragonfly" aircraft in Figures 3a-3c. This type of
四、如图4a-4c中底部安装升力发动机14的方案。这类飞机都是为了解决固定翼飞机垂直起降的问题,升力发动机只是为了实现垂直起降时的升力或者兼作一部分方向控制,不具备完全的直升机飞行模式,如多尼尔DO.231等飞机。Fourth, the scheme of installing the
五、前苏联的雅克-38战机只有两台升力发动机和一台升力-巡航发动机,机体内的升力发动机也降低了单发失效对安全的威胁。但升力发动机安装在机体内,也是有其问题的。首先,炽热的喷气里发动机进气口很近,容易造成喷气回吸问题。第二,高速喷气在机体下延地面向两侧流动,而机体上方除升力发动机进气口附近外,空气相对静止,造成使机体向地面吸附的效果,即所谓suck down。另外,因为其要在甲板上垂直起落,其向下喷出的高温气体对甲板的烧蚀也相当严重,所以这种战机很不实用。5. The Yak-38 fighter of the former Soviet Union has only two lift engines and one lift-cruise engine. The lift engine in the body also reduces the threat of single engine failure to safety. However, the installation of the lift engine in the airframe also has its problems. First of all, the engine inlet is very close in the hot jet, which is easy to cause the problem of jet back suction. Second, the high-speed jet flows on both sides of the airframe down to the ground, while the air above the airframe is relatively static except near the air intake of the lift engine, causing the airframe to absorb to the ground, which is the so-called suck down. In addition, because it has to take off and land vertically on the deck, the high-temperature gas it sprays down will also seriously ablate the deck, so this kind of fighter is very impractical.
因此航空界迫切需要寻找一种结构简单、性能可靠的兼有固定翼飞机和旋翼直升机性能且在两种飞行模式之间能随时自由转换的飞行器。Therefore aviation circle urgently needs to find a kind of simple in structure, reliable performance has both fixed-wing aircraft and rotary-wing helicopter performance and the aircraft that can change freely at any time between two kinds of flight modes.
实用新型内容Utility model content
本实用新型要解决的技术问题是为了克服现有技术中的上述缺陷,提供一种结构简单、性能可靠的兼有固定翼飞机和旋翼直升机性能且在两种飞行模式之间能随时自由转换的飞行器。The technical problem to be solved by the utility model is to overcome the above-mentioned defects in the prior art, and provide a simple-structured, reliable-performance aircraft with the performance of both fixed-wing aircraft and rotary-wing helicopters, which can be freely switched between the two flight modes at any time. aircraft.
本实用新型是通过下述技术方案来解决上述技术问题的:The utility model solves the problems of the technologies described above through the following technical solutions:
一种固定翼与电动多桨组成的具有直升机功能的复合飞行器,包括一套固定翼飞机组件,该组件包括机身、机翼和固定翼舵面控制系统,其特点在于,该飞行器还包括一组电动多桨动力系统和一个总控制器,该总控制器包括该固定翼舵面控制系统和用于控制所述电动多桨动力系统工作的电动多桨控制系统,该总控制器还用于控制该固定翼舵面控制系统和电动多桨控制系统单独工作或者协同工作;所述电动多桨动力系统的桨叶旋转平面与机身中心轴垂直。A compound aircraft composed of fixed wings and electric multiple propellers with helicopter functions, including a set of fixed wing aircraft components, which includes a fuselage, wings and a fixed wing rudder control system, and is characterized in that the aircraft also includes a A group of electric multi-blade power systems and a general controller, the general controller includes the fixed-wing rudder surface control system and an electric multi-blade control system for controlling the work of the electric multi-blade power system, and the general controller is also used for The fixed-wing rudder control system and the electric multi-blade control system are controlled to work independently or cooperatively; the blade rotation plane of the electric multi-blade power system is perpendicular to the central axis of the fuselage.
优选地,该电动多桨控制系统用于控制飞行器的升降、姿态和航向。Preferably, the electric multi-propeller control system is used to control the lift, attitude and heading of the aircraft.
优选地,该电动多桨控制系统用于通过增减所有桨叶的转速和/或螺距控制飞行器的升降。Preferably, the electric multi-blade control system is used to control the lift of the aircraft by increasing or decreasing the rotational speed and/or pitch of all the blades.
优选地,该电动多桨控制系统用于通过减小在飞行方向上相对于飞行器的重心靠前的桨叶的转速和/或螺距,同时增加在飞行方向上相对于飞行器的重心靠后的桨叶的转速和/或螺距,控制飞行器的姿态。Preferably, the electric multi-propeller control system is used to reduce the rotation speed and/or pitch of the blades in the direction of flight relative to the center of gravity of the aircraft while increasing the blades in the direction of flight relative to the center of gravity of the aircraft. The speed and/or pitch of the blades control the attitude of the aircraft.
优选地,该电动多桨控制系统用于通过增加与飞行器转向反向的桨叶的转速和/或螺距,减少与飞行器转向同向的桨叶的转速和/或螺距,控制飞行器的航向。Preferably, the electric multi-propeller control system is used to control the heading of the aircraft by increasing the rotational speed and/or pitch of the blades that are opposite to the steering of the aircraft and reducing the rotational speed and/or pitch of the blades that are in the same direction as the aircraft is turning.
优选地,所述电动多桨动力系统至少为四套,所述各桨处于同一平面内,且该平面与机身中心线垂直。Preferably, there are at least four sets of electric multi-propeller power systems, and the propellers are in the same plane, and the plane is perpendicular to the centerline of the fuselage.
优选地,所述各桨分别设置在该机身的两侧和机翼上下侧,相对于该飞行器的重心呈对称放置。Preferably, the paddles are respectively arranged on both sides of the fuselage and the upper and lower sides of the wings, and are placed symmetrically with respect to the center of gravity of the aircraft.
优选地,所述每套电动多桨动力系统或者桨均通过一支撑臂连接到所述机身或者机翼上。Preferably, each set of electric multi-blade power system or paddles is connected to the fuselage or wing through a support arm.
优选地,所述各套电动多桨动力系统中的若干套系统或者若干套桨共用一支撑臂连接到该机身或者机翼上。Preferably, several sets of systems or several sets of paddles in each set of electric multi-blade power systems share a support arm and are connected to the fuselage or the wing.
优选地,所述电动多桨动力系统的动力装置为电机。Preferably, the power device of the electric multi-blade power system is a motor.
优选地,所述总控制器包括一第一协同工作模式控制器:用于控制在从多桨直升机飞行模式到固定翼飞行模式的转换过程中,飞行器由从悬停开始通过控制机身上方桨叶转速增加,下方转速减小,飞行器飞行方向逐渐从垂直方向转向水平方向,飞行器逐步转向固定翼飞机水平运动的方式,当对应机身方向的空速大于失速速度后,各桨的转速变为相同,同时固定翼舵面控制系统对舵面进行控制,就完成了多桨直升机飞行模式与固定翼飞行模式的转换。Preferably, the general controller includes a first cooperating mode controller: used to control the transition from the multi-propeller helicopter flight mode to the fixed-wing flight mode, the aircraft starts from hovering by controlling the propellers above the fuselage. As the speed of the blades increases, the speed of the lower part decreases, the flight direction of the aircraft gradually changes from the vertical direction to the horizontal direction, and the aircraft gradually turns to the horizontal movement mode of the fixed-wing aircraft. When the airspeed corresponding to the direction of the fuselage is greater than the stall speed, the speed of each blade becomes Similarly, the fixed-wing rudder surface control system controls the rudder surface at the same time, and the conversion between the multi-rotor helicopter flight mode and the fixed-wing flight mode is completed.
优选地,所述总控制器包括一第二协同工作模式控制器:用于控制在从固定翼飞行模式到多桨直升机飞行模式转换过程中,飞行器由水平运动开始,控制机身下方桨叶转速先增加,上方桨叶转速在达到一定迎角后逐步增加,飞行器飞行方向逐渐从水平爬升后转向垂直于地面,空速变为零,实现固定翼飞行模式到多桨直升机飞行模式的转换。Preferably, the general controller includes a second cooperating mode controller: used to control the transition from the fixed-wing flight mode to the multi-rotor helicopter flight mode, the aircraft starts from horizontal movement, and controls the blade speed under the fuselage Increase first, the speed of the upper blades gradually increases after reaching a certain angle of attack, the flight direction of the aircraft gradually changes from horizontal climb to vertical to the ground, the airspeed becomes zero, and the conversion from fixed-wing flight mode to multi-rotor helicopter flight mode is realized.
优选地,所述迎角角度为10°-30°。Preferably, the angle of attack is 10°-30°.
优选地,所述飞行器的尾翼结构为不带尾翼的飞翼式、

优选地,该飞行器还包括一组额外设置于机身尾部的垂直起降用的起落架。Preferably, the aircraft also includes a set of landing gear for vertical take-off and landing additionally arranged at the tail of the fuselage.
优选地,所述桨为可折叠桨。Preferably, the paddles are collapsible paddles.
优选地,所述飞行器包括一固定翼动力系统。Preferably, the aircraft includes a fixed-wing power system.
优选地,所述固定翼动力系统为电动或者燃油动力。Preferably, the fixed-wing power system is electric or fuel-powered.
本实用新型的积极进步效果在于:The positive progressive effect of the present utility model is:
本实用新型的复合飞行器不但兼有固定翼飞机和旋翼直升机的性能,而且能够在这两种飞行模式之间自由的转换,既可以像直升机一样垂直起降和飞行,可以像固定翼飞机一样起降和飞行。The composite aircraft of the utility model not only has the performances of a fixed-wing aircraft and a rotary-wing helicopter, but also can freely switch between these two flight modes, and can take off and land vertically and fly like a helicopter, and can take off and fly like a fixed-wing aircraft. Descend and fly.
本实用新型因为采用电动,所以重量增加很轻,从而使固定翼飞机模式时增加的死重(旋翼直升机部分的重量)很少。同时由于是电动动力方案,整个飞机噪音很小,旋翼直升机向下吹的气流无高温,比用传统发动机的其他飞行器更加环保。另外,采用电机作为动力装置,可以使电动多旋翼动力系统的重量控制在整个飞机的20%以内,比采用传统的动力系统要轻很多,从而使飞机更加易于控制,节省能量。Because the utility model adopts electric power, so the weight increase is very light, thereby the dead weight (the weight of the rotor helicopter part) increased during the fixed-wing aircraft mode is very little. At the same time, due to the electric power scheme, the noise of the whole aircraft is very small, and the airflow blowing down by the rotor helicopter has no high temperature, which is more environmentally friendly than other aircraft with traditional engines. In addition, using the motor as the power device can control the weight of the electric multi-rotor power system within 20% of the entire aircraft, which is much lighter than the traditional power system, so that the aircraft is easier to control and saves energy.
本实用新型在结构上更加简单,不需要很复杂的转向结构,也不会影响机内载荷和设备的布置。最后,本实用新型应用广泛,包括民航领域和军事领域,不仅适用于模型飞机、而且适用于无人驾驶飞机,以及载人飞机等等。The utility model is simpler in structure, does not need a very complicated steering structure, and will not affect the load inside the machine and the arrangement of equipment. Finally, the utility model is widely used, including civil aviation and military fields, not only for model aircraft, but also for unmanned aircraft, manned aircraft and the like.
附图说明Description of drawings
图1为现有的将涵道风扇和前行桨叶结合起来的飞行器结构示意图。Fig. 1 is a schematic structural diagram of an existing aircraft combining a ducted fan and a forward blade.
图2为现有的倾转动力实现垂直起降的飞行器结构示意图。FIG. 2 is a schematic structural diagram of an existing aircraft capable of vertical take-off and landing by tilting power.
图3a-3c为现有的旋翼机翼共用的飞行器结构示意图。3a-3c are schematic diagrams of the structure of an existing aircraft with common rotor wings.
图4a-4c为现有的底部安装升力发动机的飞行器结构示意图。4a-4c are schematic structural diagrams of an existing aircraft with a lift engine installed at the bottom.
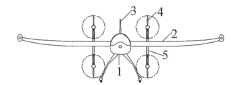
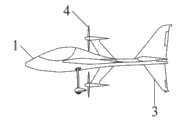
图5a-5c分别为本实用新型第一实施例的飞行器的俯视图、正视图和侧视图。5a-5c are respectively a top view, a front view and a side view of the aircraft of the first embodiment of the present invention.
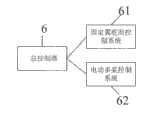
图6为本实用新型的飞行器的控制系统的结构示意图。FIG. 6 is a structural schematic diagram of the control system of the aircraft of the present invention.
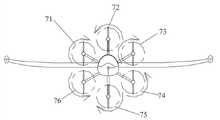
图7a、7b分别为本实用新型第二实施例的飞行器的正视图和俯视图。7a and 7b are respectively a front view and a top view of the aircraft of the second embodiment of the present invention.
具体实施方式Detailed ways
下面结合附图给出本实用新型较佳实施例,以详细说明本实用新型的技术方案。The preferred embodiments of the utility model are given below in conjunction with the accompanying drawings to describe the technical solution of the utility model in detail.
第一实施例first embodiment
如图5所示为本实用新型的一种复合飞行器,其包括一套固定翼飞机组件,该组件包括机身1、主翼2、尾翼3。也可视情况而定安装固定翼动力系统(也称固定翼飞机动力系统),即为固定翼飞机组件提供动力的系统。本领域技术人员应当理解,全文中出现的主翼和固定翼所指的是同一个部件,叫做固定翼是相对于旋翼来讲的;叫做主翼,是从飞机的结构组成上来说,相对于尾翼来讲的。在该固定翼飞机组件的基础上,增加了四套电动多桨动力系统4,但不限于四套,也可以为六套或者八套等,而电动多桨动力系统4可以采用现有的具体组成和结构来实现,所以不再赘述。As shown in FIG. 5 , it is a compound aircraft of the present invention, which includes a set of fixed-wing aircraft components, and the components include a
而电动多桨动力系统4包括动力装置和桨,所述各桨可以设置在同一平面内,且该平面与机身中心线垂直,即围绕在机身中心轴周围成近似等角放射状分布。具体地,可以把桨分别设置在该机身的两侧和主翼上下侧,相对于该飞行器的重心呈对称放置,将动力装置设置于机身上。或者将整套电动多桨动力系统4分别设置在该机身的两侧和主翼上下侧,相对于该飞行器的重心呈对称放置。这样的设置保证了飞行器整体重心处于机身的中心线上,使飞机在起降和飞行过程中始终保持平衡,不影响其工作状态。当然,也可以采用其他的位置设置,只要能达到前述效果的设置方式皆可。本实施例中,每套电动多桨动力系统4整体地或者桨单独地通过一支撑臂5连接到主翼2上,当然在其他实施例中,也可以将各套电动多桨动力系统中的若干套系统或者桨共用一支撑臂连接到机身或者机翼上。The electric
本实施例中的电动多桨动力系统采用电动动力系统,包括电机和与该电机连接的旋翼,可以根据实际情况决定是否添加变速箱。因为采用电动,所以重量增加很轻,从而使固定翼飞机模式时增加的死重(旋翼直升机部分的重量)很少。同时由于是电动动力方案,整个飞机噪音很小,旋翼直升机向下吹的气流无高温,比用传统发动机的其他飞行器更加环保。而固定翼动力系统的动力也可以采用电动或者其他动力。固定翼动力系统的数量可以为单套或者多套,固定翼动力系统的螺旋桨位于机身前方、机身后部或机身两侧,或者前后方同时设置均可。The electric multi-blade power system in this embodiment adopts an electric power system, including a motor and a rotor connected to the motor, and it can be decided whether to add a gearbox according to the actual situation. Because it is electric, the weight gain is minimal, resulting in very little added dead weight (the weight of the rotorcraft section) in fixed wing aircraft mode. At the same time, due to the electric power scheme, the noise of the whole aircraft is very small, and the airflow blowing down by the rotor helicopter has no high temperature, which is more environmentally friendly than other aircraft with traditional engines. And the power of fixed-wing power system also can adopt electric or other power. The quantity of the fixed-wing power system can be single or multiple sets, and the propellers of the fixed-wing power system are located at the front of the fuselage, at the rear of the fuselage or on both sides of the fuselage, or can be set at the front and rear at the same time.
为保证本实用新型的飞行器在两种模式之间自由的切换,配备一个总控制器6以实现在两种模式之间的切换控制。该总控制器6包括固定翼舵面控制系统61和用于控制所述电动多桨动力系统工作的电动多桨控制系统62,该总控制器还用于控制该固定翼舵面控制系统61和电动多桨控制系统62单独工作或者协同工作。因为固定翼舵面控制系统61可以采用现有的固定翼飞机的控制系统结构和组成来实现,所以在此不做赘述。这里,固定翼舵面控制系统61单独工作时,配合各桨的转速相同,对应的是固定翼飞机模式;电动多桨控制系统62单独工作时对应的是直升机模式,用于控制飞行器的升降、姿态和航向,而两个系统协同工作时称之为固定翼飞机直升机混合模式。In order to ensure that the aircraft of the utility model can switch freely between the two modes, a
为便于本领域技术人员的理解,下面从整个飞机的起降过程和飞行过程来详细描述这三种模式的具体工作原理。需要明确的是,飞行过程是指飞机在起飞之后降落之前的水平飞行过程,而升降过程是指飞机起飞和降落的过程。To facilitate the understanding of those skilled in the art, the specific working principles of these three modes will be described in detail below from the entire aircraft take-off and landing process and flight process. It needs to be clear that the flight process refers to the horizontal flight process of the aircraft after takeoff and before landing, and the lift process refers to the process of takeoff and landing of the aircraft.
其中起降过程可以采用直升机模式、固定翼飞机模式:The take-off and landing process can adopt helicopter mode and fixed-wing aircraft mode:
1、在直升机模式起降时,飞行器垂直于地面放置,即机身中心线垂直于地面,而桨叶的旋转平面平行于地面,从而实现4组(或者以上)的电动多桨控制系统62完全按照直升机模式飞行。使用垂直起降功率消耗较大,但使用旋翼升降系统时间很短,起降消耗能量占整个飞行能耗能量比例不大,故这种方式是此飞行器主要的起降模式,此时飞机像一般直升机一样起降。这种起降方式不但适用于模型飞机和无人机,而且也适用于载人飞机,在载人飞机中设置现有的悬挂装置,使飞机无论是升降还是水平飞行时,人体都能够保持正常的状态,不会倾斜。1. When taking off and landing in helicopter mode, the aircraft is placed perpendicular to the ground, that is, the centerline of the fuselage is perpendicular to the ground, and the rotation plane of the blades is parallel to the ground, so as to realize 4 groups (or more) of electric
2、在固定翼飞机模式起降时,飞行器水平置于地面,即机身中心线平行于地面,而桨叶的旋转平面近似垂直于地面,各桨转速相同,从而使4组(或者以上)电动多桨控制系统62作为固定翼飞机动力系统组。飞机像一般固定翼飞机一样在跑道上起降。2. When taking off and landing in fixed-wing aircraft mode, the aircraft is placed horizontally on the ground, that is, the centerline of the fuselage is parallel to the ground, and the rotation plane of the blades is approximately perpendicular to the ground. The rotation speed of each blade is the same, so that 4 groups (or more) The electric
而飞行模式可以分为直升机模式、固定翼飞机模式:The flight modes can be divided into helicopter mode and fixed-wing aircraft mode:
1、在直升机模式飞行时,4组(或者以上)电动多桨控制系统62完全按照直升机模式飞行,飞行器可以完成所有直升机的功能,从而能完成航拍、固定位置侦查等任务,此时飞机像一般直升机一样飞行。此种方式飞行时,机身中心线是垂直于地面的,而桨叶的旋转平面平行于地面。其中,电动多桨控制系统通过减小在飞行方向上相对于飞行器的重心靠前的桨的转速和/或螺距,同时增加在飞行方向上相对于飞行器的重心靠后的桨的转速和/或螺距,来控制飞行器的姿态。电动多桨控制系统通过增加与飞行器转向反向的桨的转速和/或螺距,减少与飞行器转向同向的桨的转速和/或螺距,控制飞行器的航向。1. When flying in helicopter mode, 4 groups (or more) of electric
具体来讲,就是使其中一半的桨顺时针方向旋转,另一半桨逆时针方向旋转,在直升机模式下,可以利用电子陀螺控制4个桨的转速,形成一个稳定的旋翼直升机飞行平台。通过改变桨转速,改变4个桨的升力和扭矩,从而控制旋翼直升机向各个方向的飞行及转向。其中电子陀螺为本领域常用的装置,技术人员可根据具体需要自己选择其类型。Specifically, half of the paddles rotate clockwise, and the other half rotates counterclockwise. In helicopter mode, the electronic gyroscope can be used to control the speed of the four paddles to form a stable rotor helicopter flying platform. By changing the rotation speed of the paddles, the lift and torque of the 4 paddles are changed to control the flight and steering of the rotor helicopter in all directions. Among them, the electronic gyroscope is a commonly used device in the art, and technicians can choose its type according to specific needs.
2、在固定翼飞机模式飞行时,4组(或者以上)电动多桨控制系统62做为固定翼机动力系统。可以完成所有固定翼飞机的功能。优点是功耗小,飞行距离和时间长。此模式是此飞行器的主要飞行模式。在转换成固定翼机模式后由于不需要那么大的动力,所以可以只开其中的部分桨,其他桨可以折叠以降低固定翼飞机模式下的飞行阻力。2. When flying in fixed-wing aircraft mode, 4 groups (or above) of electric
当固定翼舵面控制系统61和电动多桨控制系统62协同工作时,在从多桨直升机模式飞行到固定翼模式飞行的转换过程中,飞行器由从悬停开始通过控制机身上方桨叶转速增加,下方转速减小,飞行器飞行方向逐渐从垂直方向转向水平方向,飞行器逐步转向固定翼飞机水平运动的方式,当对应机身方向的空速大于失速速度后,各桨的转速变为相同,同时固定翼舵面控制系统对舵面进行控制,就完成了多桨直升机模式飞行与固定翼模式飞行的转换。也就是说直升机模式升降或者飞行时,桨是起到直升机旋翼的功能;而转换到固定翼模式时,各桨转速相同,此时桨起到的是固定翼飞机推进桨的作用。When the fixed-wing rudder
在从固定翼模式飞行到多桨直升机模式飞行转换过程中,飞行器由水平运动开始,控制机身下方桨叶转速先增加,上方桨叶转速在飞行器达到一定迎角(比如10°-30°之间)后逐步增加,飞行器飞行方向逐渐从水平爬升后转向垂直于地面,空速变为零,本领域技术人员应当理解也包括接近于零的情况,实现固定翼模式飞行到多桨直升机模式飞行的转换。以上两种情形可以分别通过两个协同工作模式控制器来实现。During the conversion process from fixed-wing mode flight to multi-rotor helicopter mode flight, the aircraft starts from horizontal movement, and the rotation speed of the lower blades of the control fuselage is increased first, and the rotation speed of the upper blades is reached when the aircraft reaches a certain angle of attack (such as 10°-30°). After increasing gradually, the flight direction of the aircraft gradually changes from horizontal climb to vertical to the ground, and the airspeed becomes zero. Those skilled in the art should understand that it also includes the situation close to zero, and realizes the fixed-wing mode flight to the multi-rotor helicopter mode flight conversion. The above two situations can be realized by two cooperative working mode controllers respectively.
总结来讲,就是说在整个直升机模式中,机身中心线都是垂直于地面的,当然这种垂直是近似的垂直,本领域技术人员应当理解。To sum up, it means that in the whole helicopter mode, the centerline of the fuselage is perpendicular to the ground. Of course, this vertical is approximately vertical, which should be understood by those skilled in the art.
以上提到的总控制器、各控制系统的具体制作与实现均可通过现有的电子控制方式或者软件方式来实现,在此不做赘述。The specific production and implementation of the above-mentioned general controller and each control system can be realized by existing electronic control methods or software methods, and will not be repeated here.
在其他实施例中,本实用新型的固定翼机组件的尾翼结构还可以为其他类型,如不带尾翼的飞翼式、形、
第二实施例second embodiment
如图7a、7b,本实施例与第一实施例的不同之处主要在于:本实施例中有6套电动多桨动力系统,呈放射状安装在机身上靠近主翼的位置处。其余部分与第一实施例基本相同。As shown in Figures 7a and 7b, the main difference between this embodiment and the first embodiment is that there are 6 sets of electric multi-blade power systems in this embodiment, which are radially installed on the fuselage near the main wing. The rest are basically the same as the first embodiment.
图中,升降时6个桨全部增加或者减小转速。向左侧飞时:桨73、74增速,桨71、76减速。向右侧飞时:桨71、76增速,桨73、74减速。左转向时:桨71、73、75增速,桨72、74、76减速;右转向时:桨72、74、76增速,桨71、73、75减速;前飞:桨74、76增速,桨71、73减速;后飞:桨71、73增速,桨74、76减速。In the figure, all 6 propellers increase or decrease the rotational speed when lifting or lowering. When flying to the left:
虽然以上描述了本实用新型的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本实用新型的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本实用新型的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本实用新型的保护范围。Although the specific embodiments of the present invention have been described above, those skilled in the art should understand that these are only examples, and the protection scope of the present invention is defined by the appended claims. Those skilled in the art can make various changes or modifications to these embodiments without departing from the principle and essence of the present utility model, but these changes and modifications all fall within the protection scope of the present utility model.
Claims (14)

Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201120397882CN202728574U (en) | 2011-10-17 | 2011-10-17 | Composite aircraft with fixed wing and electric multiple propellers combined and with helicopter function |
| PCT/CN2011/083301WO2013056492A1 (en) | 2011-10-17 | 2011-12-01 | Composite aircraft consisting of fixed-wing and electrically driven propellers and having helicopter functions |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201120397882CN202728574U (en) | 2011-10-17 | 2011-10-17 | Composite aircraft with fixed wing and electric multiple propellers combined and with helicopter function |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN202728574Utrue CN202728574U (en) | 2013-02-13 |
Family
ID=47654301
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201120397882Expired - LifetimeCN202728574U (en) | 2011-10-17 | 2011-10-17 | Composite aircraft with fixed wing and electric multiple propellers combined and with helicopter function |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN202728574U (en) |
| WO (1) | WO2013056492A1 (en) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103640690A (en)* | 2013-09-02 | 2014-03-19 | 张更生 | Method for vertical takeoff and landing and rapid flight through change of aircraft engines |
| CN105173076A (en)* | 2015-09-29 | 2015-12-23 | 上海圣尧智能科技有限公司 | VTOL (vertical take-off and landing) UAV (unmanned aerial vehicle) |
| CN105346725A (en)* | 2015-09-29 | 2016-02-24 | 上海圣尧智能科技有限公司 | Vertical take-off and landing unmanned aerial vehicle |
| CN106114854A (en)* | 2016-08-09 | 2016-11-16 | 烟台中飞海装科技有限公司 | A kind of push-button aircraft |
| CN106114853A (en)* | 2016-08-09 | 2016-11-16 | 烟台中飞海装科技有限公司 | A kind of push-button aircraft |
| CN107021219A (en)* | 2017-04-07 | 2017-08-08 | 南昌航空大学 | Fixed-wing unmanned plane and its control method |
| CN108860582A (en)* | 2017-05-08 | 2018-11-23 | 品尼高维斯塔有限责任公司 | More rotor lifting body aircraft with tail portion propeller |
| CN109305356A (en)* | 2017-08-29 | 2019-02-05 | 陕西安康领航智能股份有限公司 | A kind of tilting type vertical take-off and landing drone |
| CN110203387A (en)* | 2019-05-09 | 2019-09-06 | 深圳市禾启智能科技有限公司 | VTOL Fixed Wing AirVehicle |
| JP6609760B1 (en)* | 2018-09-22 | 2019-11-27 | 株式会社エアロネクスト | Flying object |
| JP2020147286A (en)* | 2020-06-18 | 2020-09-17 | 株式会社エアロネクスト | Flying body |
| CN112849403A (en)* | 2019-11-26 | 2021-05-28 | 上海峰飞航空科技有限公司 | Unmanned aerial vehicle and control method thereof |
| CN115520371A (en)* | 2022-09-27 | 2022-12-27 | 成都沃飞天驭科技有限公司 | Aircraft control method, system, aircraft and medium |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7699766B2 (en)* | 2020-02-27 | 2025-06-30 | 義郎 中松 | High-speed drones and other flying objects |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2015827A6 (en)* | 1989-10-10 | 1990-09-01 | Del Campo Aguilera Juan | Remote-controlled equipment-carrying aircraft |
| CN101549754B (en)* | 2009-04-29 | 2012-05-23 | 北京航空航天大学 | A rotary-fixed-wing composite aircraft and its design method |
| CN201923320U (en)* | 2011-01-13 | 2011-08-10 | 杨苡 | Twin-engine vertical take-off and landing fixed-wing unmanned aerial vehicle |
| CN102133926B (en)* | 2011-03-08 | 2013-05-08 | 上海大学 | Tailstock type vertical take-off and landing unmanned aerial vehicle |
- 2011
- 2011-10-17CNCN 201120397882patent/CN202728574U/ennot_activeExpired - Lifetime
- 2011-12-01WOPCT/CN2011/083301patent/WO2013056492A1/enactiveApplication Filing
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103640690A (en)* | 2013-09-02 | 2014-03-19 | 张更生 | Method for vertical takeoff and landing and rapid flight through change of aircraft engines |
| CN105173076A (en)* | 2015-09-29 | 2015-12-23 | 上海圣尧智能科技有限公司 | VTOL (vertical take-off and landing) UAV (unmanned aerial vehicle) |
| CN105346725A (en)* | 2015-09-29 | 2016-02-24 | 上海圣尧智能科技有限公司 | Vertical take-off and landing unmanned aerial vehicle |
| CN106114853B (en)* | 2016-08-09 | 2019-05-10 | 烟台中飞海装科技有限公司 | A kind of push-button aircraft |
| CN106114854A (en)* | 2016-08-09 | 2016-11-16 | 烟台中飞海装科技有限公司 | A kind of push-button aircraft |
| CN106114854B (en)* | 2016-08-09 | 2019-06-25 | 烟台中飞海装科技有限公司 | A kind of push-button aircraft |
| CN106114853A (en)* | 2016-08-09 | 2016-11-16 | 烟台中飞海装科技有限公司 | A kind of push-button aircraft |
| CN107021219B (en)* | 2017-04-07 | 2020-06-09 | 南昌航空大学 | Fixed-wing unmanned aerial vehicle and control method thereof |
| CN107021219A (en)* | 2017-04-07 | 2017-08-08 | 南昌航空大学 | Fixed-wing unmanned plane and its control method |
| CN108860582A (en)* | 2017-05-08 | 2018-11-23 | 品尼高维斯塔有限责任公司 | More rotor lifting body aircraft with tail portion propeller |
| CN109305356A (en)* | 2017-08-29 | 2019-02-05 | 陕西安康领航智能股份有限公司 | A kind of tilting type vertical take-off and landing drone |
| JP6609760B1 (en)* | 2018-09-22 | 2019-11-27 | 株式会社エアロネクスト | Flying object |
| CN110203387A (en)* | 2019-05-09 | 2019-09-06 | 深圳市禾启智能科技有限公司 | VTOL Fixed Wing AirVehicle |
| CN112849403A (en)* | 2019-11-26 | 2021-05-28 | 上海峰飞航空科技有限公司 | Unmanned aerial vehicle and control method thereof |
| CN112849403B (en)* | 2019-11-26 | 2023-09-29 | 上海峰飞航空科技有限公司 | Unmanned aerial vehicle and control method thereof |
| JP2020147286A (en)* | 2020-06-18 | 2020-09-17 | 株式会社エアロネクスト | Flying body |
| CN115520371A (en)* | 2022-09-27 | 2022-12-27 | 成都沃飞天驭科技有限公司 | Aircraft control method, system, aircraft and medium |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013056492A1 (en) | 2013-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103043212B (en) | Composite aircraft composed of fixed wing and electric multi-rotor | |
| CN202728574U (en) | Composite aircraft with fixed wing and electric multiple propellers combined and with helicopter function | |
| CN202728575U (en) | Composite aircraft with fixed wing and electric multi-rotor-wing combined | |
| CN202728576U (en) | Transformable composite aircraft formed by fixed wing and electric multi-propeller | |
| WO2013056493A1 (en) | Composite aircraft consisting of fixed-wing and electrically driven propellers | |
| CN204250360U (en) | Culvert type verts aircraft | |
| CN104290907B (en) | Novel hybrid vertical/short take off and landing unmanned vehicle | |
| WO2016184358A1 (en) | Fixed structure type vertical take-off and landing aircraft based on dual flying control systems and control method therefor | |
| CN202754143U (en) | Rotating engine vertical take-off and landing aircraft | |
| CN104401480A (en) | Ducted tilt aircraft | |
| CN107176286A (en) | Folding fixed-wing vertical take-off and landing unmanned aerial vehicle based on double ducted fan dynamical systems | |
| CN105730692B (en) | One kind is verted the long endurance combined type aircraft of quadrotor | |
| CN108128448A (en) | The coaxial tilting rotor wing unmanned aerial vehicle of double shoe formulas and its control method | |
| RU2749709C1 (en) | Swashplate of multi-rotor aircraft with rigid attachment of blades and method for its operation | |
| CN106628162A (en) | Composite unmanned aerial vehicle | |
| CN203332392U (en) | Tiltable-rotation type fixed-wing unmanned aerial vehicle | |
| CN106927040A (en) | It is a kind of can VTOL the rotor tailless configuration aircraft of tailstock formula four | |
| CN112937849A (en) | Vertical take-off and landing aircraft with combined layout of tilting type propeller and fixed propeller | |
| CN205661659U (en) | Electronic multiaxis rotor unmanned aerial vehicle system of verting | |
| CN107878746A (en) | A kind of VTOL fixed-wing long endurance unmanned aircraft of oil electric mixed dynamic | |
| US20240174353A1 (en) | Vertical take-off and landing aircraft based on variable rotor-wing technology and dual rotor-wing layout | |
| CN106672223A (en) | Hybrid tilt rotor aircraft with four coaxial contra-rotating propellers | |
| CN113371190A (en) | Combined type high-speed helicopter based on conventional rotor wing configuration | |
| CN107352029A (en) | A kind of electronic multiaxis tilting rotor wing unmanned aerial vehicle system | |
| CN101844619A (en) | Tiltrotor aircraft |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| ASS | Succession or assignment of patent right | Owner name:YUNEEC INTERNATIONAL CO.,LTD. Free format text:FORMER OWNER: TIAN YU Effective date:20150708 Free format text:FORMER OWNER: JIANG WENYAN Effective date:20150708 | |
| C41 | Transfer of patent application or patent right or utility model | ||
| TR01 | Transfer of patent right | Effective date of registration:20150708 Address after:Jinxi town Wei Road in Kunshan city Suzhou city Jiangsu province 215324 No. 388 Patentee after:Yuneec International co.,Ltd. Address before:The town of Jiuting Songjiang District 201615 Shanghai City Shenglong Road No. 960 Patentee before:Tian Yu Patentee before:Jiang Wenyan | |
| C41 | Transfer of patent application or patent right or utility model | ||
| TR01 | Transfer of patent right | Effective date of registration:20160315 Address after:Hongkong Hongguang Road, Kowloon Bay China billion centre 10 floor Patentee after:You Li Science and Technology Ltd. Address before:Jinxi town Wei Road in Kunshan city Suzhou city Jiangsu province 215324 No. 388 Patentee before:Yuneec International co.,Ltd. | |
| CX01 | Expiry of patent term | Granted publication date:20130213 | |
| CX01 | Expiry of patent term |