CN1931653A - Crawler type multiple joint hinged robot suitable for search and detection in coal mine - Google Patents
Crawler type multiple joint hinged robot suitable for search and detection in coal mineDownload PDFInfo
- Publication number
- CN1931653A CN1931653ACN 200610150840CN200610150840ACN1931653ACN 1931653 ACN1931653 ACN 1931653ACN 200610150840CN200610150840CN 200610150840CN 200610150840 ACN200610150840 ACN 200610150840ACN 1931653 ACN1931653 ACN 1931653A
- Authority
- CN
- China
- Prior art keywords
- unit module
- crawler
- hinge
- module
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Manipulator (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及一种搜索探测机器人,特别是一种方便适用于煤矿井下复杂地形的搜索探测机器人。The invention relates to a search and detection robot, in particular to a search and detection robot which is convenient and suitable for complex terrain in coal mines.
背景技术Background technique
目前国内外煤矿井下搜救工作的辅助设备中鲜有应用救援机器人。美国DiscoverMiner公司开发的MinBot-XA和MOLE是目前国际上仅有的井下救援机器人的原型,但前者易倾覆;后者采用圆柱状轮子,前后两部分由纵向轴连接,机器人上下部分结构对称,不存在倾覆的问题,但单体机器人长度的限制决定了其有限的越障能力。At present, rescue robots are rarely used in auxiliary equipment for underground search and rescue work in coal mines at home and abroad. MinBot-XA and MOLE developed by American DiscoverMiner Company are currently the only prototypes of underground rescue robots in the world, but the former is easy to overturn; the latter uses cylindrical wheels, and the front and rear parts are connected by a longitudinal axis. There is a problem of overturning, but the limitation of the length of a single robot determines its limited ability to overcome obstacles.
发明内容Contents of the invention
为解决煤矿井下复杂环境中环境监测、人员搜索定位、远程通信的问题,针对现有机器人存在易倾覆、越障能力差的弊端,本发明提供了一种不但不易倾覆,而且具有极好的越障能力且可以非常容易地穿越狭小长缝的履带式多关节机器人。In order to solve the problems of environmental monitoring, personnel search and positioning, and remote communication in the complex environment of coal mines, and aiming at the disadvantages of easy overturning and poor obstacle-surmounting ability of existing robots, the present invention provides a robot that is not only difficult to overturn, but also has excellent overtaking ability. It is a crawler-type articulated robot that can easily pass through narrow and long gaps.
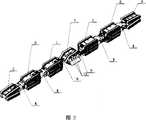
一种适用于煤矿矿井搜索探测的履带式多关节铰接机器人,它包括电源、控制传感器和搭载体,将所述电源、控制传感器和搭载体分别制成各自的单元模块,形成电源单元模块1、控制传感单元模块2和搭载单元模块3,它还包括头部单元模块4、尾部单元模块5和铰驱动单元模块6,所述各单元模块之间通过铰链连接成为蛇形;在所述各单元模块的外表面都设有履带7,所述履带7都通过各自单元模块的电机控制转动。A crawler-type multi-joint articulated robot suitable for coal mine search and detection, which includes a power supply, a control sensor and a carrying body, and the power supply, control sensors and carrying body are respectively made into respective unit modules to form a power supply unit module 1, Control
本发明所述机器人能够翻越相对机器人车体较高的障碍,穿越上下甚至左右都有障碍只有一个狭小的开放空间,跨越相对机器人车体较长的裂缝,从而进入目标区域执行搜救任务。因此,本发明所述机器人具有极其强大的移动能力和可靠性,为丰富的感知功能提供了一个健壮的平台,利于推广应用。The robot of the present invention can climb over obstacles that are higher than the robot car body, cross obstacles that are up and down, even left and right, with only a narrow open space, and cross a crack that is relatively long relative to the robot car body, thereby entering the target area to perform search and rescue tasks. Therefore, the robot of the present invention has extremely powerful mobility and reliability, provides a robust platform for rich perception functions, and is beneficial to popularization and application.
附图说明Description of drawings
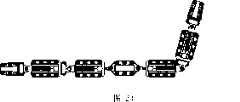
图1是本发明所述机器人整体结构弯曲时的状态示意图,图2是本发明所述机器人整体结构呈直线形的状态示意图,图3是具体实施方式一所述头模块的主视图,图4是图3的侧视图,图5是图3的俯视图,图6是具体实施方式一所述头模块整体结构示意图,图7是具体实施方式一所述体模块的主视图,图8是图7的侧视图,图9是图7的俯视图,图10是具体实施方式一所述体模块整体结构示意图,图11是体模块上的侧履带附着地面助推时的状态示意图,图12是体模块上的侧履带附着侧壁辅助转弯时的状态示意图,图13是具体实施方式一所述搭载单元模块的主视图,图14是图13的侧视图,图15是图13的俯视图,图16是具体实施方式一所述搭载单元模块整体结构示意图,图17是主动铰的主视图,图18是图17的侧视图,图19是图17的俯视图,图20是主动铰的整体结构示意图,图21是被动铰链的结构示意图,图22是本发明所述机器人四周履带作用穿越狭小缝隙时的状态示意图,图23是本发明所述机器人通过主动铰链抬举翻越较高障碍时的状态示意图,图24是本发明所述机器人通过铰链作用跨越较大裂缝时的状态示意图,图25是本发明所述机器人被动铰链结合主动铰链变被动灵活适应交错地形的状态示意图。Fig. 1 is a schematic diagram of the state when the overall structure of the robot of the present invention is bent; Fig. 2 is a schematic diagram of the state of the overall structure of the robot of the present invention in a straight line; Fig. 3 is a front view of the head module described in Embodiment 1; Fig. 4 It is a side view of FIG. 3 , FIG. 5 is a top view of FIG. 3 , FIG. 6 is a schematic diagram of the overall structure of the head module in Embodiment 1, and FIG. 7 is a front view of the body module in Embodiment 1. FIG. 8 is a schematic view of the body module in Embodiment 1. Fig. 9 is a top view of Fig. 7, Fig. 10 is a schematic diagram of the overall structure of the body module in Embodiment 1, Fig. 11 is a schematic diagram of the state when the side track on the body module is attached to the ground for boosting, and Fig. 12 is a schematic diagram of the body module Figure 13 is a front view of the carrying unit module described in Embodiment 1, Figure 14 is a side view of Figure 13, Figure 15 is a top view of Figure 13, Figure 16 is a 17 is a front view of the active hinge, FIG. 18 is a side view of FIG. 17, FIG. 19 is a top view of FIG. 17, and FIG. 20 is a schematic diagram of the overall structure of the active hinge. 21 is a schematic structural view of a passive hinge. FIG. 22 is a schematic view of the state of the robot when the crawlers around it pass through a narrow gap. FIG. 23 is a schematic view of the state of the robot of the present invention when it lifts over a higher obstacle through an active hinge. FIG. 24 It is a schematic diagram of the state when the robot of the present invention crosses a large crack through the action of a hinge, and FIG. 25 is a schematic diagram of the state of the robot passive hinge combined with an active hinge to passively and flexibly adapt to the staggered terrain of the present invention.
具体实施方式Detailed ways
具体实施方式一:本实施方式是一种适用于煤矿矿井搜索探测的履带式多关节铰接机器人,所采用的技术方案是,将机器人所有组件分成几个模块,通过铰链将各模块连接形成细长结构,使机器人体可以根据不规则的地形调整自身姿态,从而翻越大的陡坡或深沟,或者进入狭窄区域执行搜救任务。参照图1、图2,它的具体结构包括电源、控制传感器和搭载体,将所述电源、控制传感器和搭载体分别制成各自的单元模块,形成电源单元模块1、控制传感单元模块2和搭载单元模块3,它还包括头部单元模块4、尾部单元模块5和铰驱动单元模块6,所述各单元模块之间通过铰链连接成为蛇形;在所述各单元模块的外表面都设有履带7,所述履带7都通过各自单元模块的电机控制转动,采用履带式结构,比轮式结构能更好地贴合地面,利于产生摩擦驱动前进。Specific implementation mode 1: This implementation mode is a crawler-type multi-joint articulated robot suitable for coal mine search and detection. The technical solution adopted is to divide all components of the robot into several modules, and connect each module through hinges to form a slender The structure enables the robot body to adjust its posture according to the irregular terrain, so as to climb over a large steep slope or deep ditch, or enter a narrow area to perform search and rescue tasks. Referring to Fig. 1 and Fig. 2, its specific structure includes a power supply, a control sensor and a mounting body, and the power supply, the control sensor and the mounting body are respectively made into respective unit modules to form a power supply unit module 1 and a control
所述头部单元模块4和尾部单元模块5分别设置在蛇形机器人的两端(简称头模块),头模块结构见图3、图4、图5和图6,每个头模块的上表面和下表面分别设有一组履带,上表面的履带和下表面的履带由单电机同步驱动,本实施方式中,上层履带和下层履带各为两只,即头部单元模块4和尾部单元模块5分别具有左右双层共四条履带。由于单层履带在推进过程中会将前上方障碍物卷向履带下方造成进一步的阻碍,因而本实施方式采用双层履带,这样可以将障碍物卷向后方,以“挖掘”的方式推进。同时,由于双层履带之间的空间很小,所以可以防止大的石块落入履带中造成卡死。另外,两层履带最大的优势还在于它可以钻过狭小空间。The head unit module 4 and the
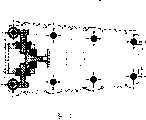
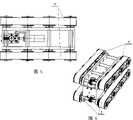
所述电源单元模块1、控制传感单元模块2和铰驱动单元模块6统称为体模块,参照图7、图8、图9和图10,体模块的上表面、下表面以及两个侧面都分别设有一组履带。本实施方式中,上层履带为两只,下层履带为两只,上层和下层的履带分别由各自的电机控制驱动;左侧履带和右侧履带分别为四只,每侧的履带由一个电机驱动,以便于转向推进。The power supply unit module 1, the control
侧履带的作用在于,在井下复杂弯曲巷道中,侧履带有利于助推和转向。当机器人车体发生大的倾斜,下履带不能很好地附着地面时,侧履带与地面的接触和相对运动可以起到助推的作用,参照图11;当有比较大的转弯时,侧履带与墙壁的接触不但避免了车体卡死,还能以较大的驱动力辅助转弯,参照图12。The function of the side crawler is that it is beneficial for boosting and steering in complex curved tunnels underground. When the body of the robot has a large inclination and the lower track cannot adhere to the ground well, the contact and relative movement between the side track and the ground can play a role in boosting, refer to Figure 11; when there is a relatively large turn, the side track The contact with the wall not only prevents the car body from being stuck, but also assists turning with a larger driving force, as shown in Figure 12.
所述搭载单元模块3上的履带绕过模块的上下表面,参照图13、图14、图15和图16,本实施方式所述履带为两只并分布在模块的左侧和右侧,两侧的履带分别由各自的电机独立驱动;在所述搭载单元模块3上还设有搭载舱3-1,所述搭载舱3-1内设置有若干个传感通讯节点10,舱门放下可释放出传感通讯节点10。本发明的机器人采用特殊设计的多跳式通讯方式,履带式多关节机器人的搭载单元模块3中携带有数个传感通讯节点10,由于地形复杂,很容易造成通讯死点,所以本发明的履带式多关节机器人在行径的过程中沿途会放置多个通讯节点10,每个通讯节点10实质为小型机器人,具有简单运动机构、两套无线射频收发器(含冗余)、传感器等。本发明的履带式多关节机器人通过沿途释放的通讯节点构成多跳网络,能接收操作者的指令并将现场信息发送给操作者,保证操作者与履带式多关节机器人之间的通讯畅通,避免通讯死点,从而辅助生产和救护人员进行紧急决策或实施快速、有效的救助。The crawlers on the
所述铰驱动单元模块6为两个,两个铰驱动单元模块6分别与头部单元模块4和尾部单元模块5相连接;所述铰驱动单元模块6与相邻模块之间通过具有两自由度的铰链8进行连接,其他模块之间通过具有三自由度的铰链9进行连接。There are two hinge
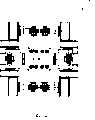
本实施方式中,具有两自由度的铰链8称为主动铰链,它的具体结构为,参照图17、图18、图19和图20,相互垂直的一号轴8-1和二号轴8-2固定连接,一号轴8-1和二号轴8-2的端部再通过铰链与相邻模块之间连接,所述二号轴8-2可通过电机8-3来带动。主动铰链可以实现对其前部单元的抬举和转动。具有三自由度的铰链9称为被动铰链,它的具体结构为球形铰结构,参照图21,所述球形铰的两端分别与相邻的模块连接,被动铰链可以灵活适应地形。主动铰链通过电机8-3控制可以转变为被动铰链,适应更广泛的复杂环境。通过铰链将各模块连接形成细长的蛇形结构,机器人体可以根据不规则地形调整自身姿态,使履带有效覆盖地面。In this embodiment, the
由四周履带包覆的关节经过主被动铰链连接后,具有极其强大的运动能力。四周履带可以分别将障碍物卷向后方,以“挖掘”的方式推进,钻过较窄的缝隙,参照图22。通过主动铰链对关节体的抬举,机器人可以翻越高达两个关节长度的障碍(参照图23),也可以跨越宽达两个关节长度的裂缝,参照图24。本发明所述机器人的主动铰链切换为被动后,和原有的被动铰链一起可以灵活适应复杂的交错地形,参照图25。The joints covered by the crawler tracks are connected by active and passive hinges, so they have extremely powerful movement capabilities. The crawler tracks around can respectively roll the obstacles to the rear, advance in a "digging" manner, and drill through narrow gaps, as shown in Figure 22. Through the lifting of the joint body by the active hinge, the robot can climb over obstacles up to two joint lengths (refer to FIG. 23 ), and can also cross cracks up to two joint lengths, see FIG. 24 . After the active hinge of the robot described in the present invention is switched to passive, it can flexibly adapt to complex interlaced terrain together with the original passive hinge, as shown in FIG. 25 .
使用时,可以在机器人头部单元模块和尾部单元模块上装摄像头,摄像头臂具有两个自由度,末端配置具有弹性保护的CCD红外摄像头,可以被动适应深入狭缝中观测的需要。摄像头收回过程可以实现擦镜头的动作,便于多粉尘条件下镜头保持清洁,这种自维护措施为机器人井下恶劣环境作业提供了保障。When in use, the camera can be installed on the head unit module and the tail unit module of the robot. The camera arm has two degrees of freedom, and the end is equipped with a CCD infrared camera with elastic protection, which can passively adapt to the needs of deep observation in the slit. The lens can be wiped during the retraction process of the camera, which is convenient for keeping the lens clean under dusty conditions. This self-maintenance measure provides a guarantee for the robot to work in harsh underground environments.
另外,本发明所述机器人不限于所述的七个模块,实际使用时也可以将不同的功能合成在某个模块之上从而减少模块的数量,也都在本发明的保护范围之内;本发明所述机器人只要成为细长的蛇形即可,并不限定各模块之间的前后位置关系,因此都在本发明的保护范围之内。In addition, the robot described in the present invention is not limited to the seven modules mentioned above, and different functions can also be synthesized on a certain module to reduce the number of modules in actual use, which is also within the protection scope of the present invention; As long as the robot described in the invention is in the shape of a slender snake, the front-rear positional relationship between the modules is not limited, so all of them are within the protection scope of the present invention.
Claims (7)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CNB2006101508401ACN100410128C (en) | 2006-09-28 | 2006-09-28 | A crawler-type multi-joint articulated robot suitable for search and detection in coal mines |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CNB2006101508401ACN100410128C (en) | 2006-09-28 | 2006-09-28 | A crawler-type multi-joint articulated robot suitable for search and detection in coal mines |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1931653Atrue CN1931653A (en) | 2007-03-21 |
| CN100410128C CN100410128C (en) | 2008-08-13 |
Family
ID=37877721
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2006101508401AActiveCN100410128C (en) | 2006-09-28 | 2006-09-28 | A crawler-type multi-joint articulated robot suitable for search and detection in coal mines |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN100410128C (en) |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101265813B (en)* | 2008-05-14 | 2010-04-14 | 哈尔滨工业大学 | Multi-robot system for mine search and detection based on wireless sensor network |
| CN101956564A (en)* | 2010-07-27 | 2011-01-26 | 上海中为智能机器人有限公司 | Autonomous intelligent detection multi-robot system for mine |
| CN102069490A (en)* | 2010-11-17 | 2011-05-25 | 武汉理工大学 | Quickly-detachable combined search and rescue robot |
| CN102700636A (en)* | 2012-05-30 | 2012-10-03 | 上海大学 | Crawler drive device capable of assisting search and rescue equipment in entering interiors of ruins or pipes |
| CN103507069A (en)* | 2012-06-29 | 2014-01-15 | 新昌县冠阳技术开发有限公司 | Modular device used for assembling multifunctional snakelike disaster relief robot |
| CN103754280A (en)* | 2014-01-24 | 2014-04-30 | 哈尔滨工业大学 | Track-surrounding type overturn-preventing travel mechanism |
| CN103921854A (en)* | 2014-04-03 | 2014-07-16 | 贵州詹阳动力重工有限公司 | Train type caterpillar all-terrain vehicle |
| CN104554501A (en)* | 2015-01-07 | 2015-04-29 | 上海大学 | Crawler type drive device for narrow and small space |
| CN104811671A (en)* | 2015-05-19 | 2015-07-29 | 国家电网公司 | Mobile intelligent video monitoring device |
| CN105109566A (en)* | 2015-09-28 | 2015-12-02 | 东南大学 | Cooperation stair climbing control method for caterpillar mobile robots |
| CN105171716A (en)* | 2015-09-01 | 2015-12-23 | 上海大学 | Multi-joint search-and-rescue robot |
| CN106428294A (en)* | 2016-09-26 | 2017-02-22 | 原平市丰汇机械制造有限公司 | A zero-deviation trackless train |
| CN107116543A (en)* | 2017-05-24 | 2017-09-01 | 哈尔滨工业大学 | A kind of snake-shaped robot of modular reconfigurable |
| CN108748124A (en)* | 2018-05-28 | 2018-11-06 | 中国科学院自动化研究所 | Snake-shaped robot |
| CN109383659A (en)* | 2017-08-13 | 2019-02-26 | 屈娟娟 | A kind of polypody modularized robot that can freely assemble |
| CN109751048A (en)* | 2019-01-17 | 2019-05-14 | 北京理工大学 | A snake-shaped bionic robot fracture-cavity reservoir survey system and method |
| CN110065054A (en)* | 2019-04-09 | 2019-07-30 | 中国科学院自动化研究所 | Multistage drives master-slave mode snake-shaped robot |
| CN111923032A (en)* | 2020-10-12 | 2020-11-13 | 中国科学院沈阳自动化研究所 | Modular reconfigurable orthogonal joint chain type robot |
| CN113043256A (en)* | 2019-12-27 | 2021-06-29 | 沈阳新松机器人自动化股份有限公司 | Snakelike joint crawler-type composite robot |
| CN113184232A (en)* | 2021-05-18 | 2021-07-30 | 哈尔滨理工大学 | Unit module of space cell robot reconstruction platform |
| CN116061160A (en)* | 2022-11-28 | 2023-05-05 | 沈阳航空航天大学 | Crawler-type snake-shaped robot for narrow space and movement method thereof |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4160619A (en)* | 1977-11-04 | 1979-07-10 | New River Manufacturing Company, Inc. | Horizontally articulated shuttle car |
| CN1136117C (en)* | 1999-01-20 | 2004-01-28 | 山东科技大学 | Four-sided crawler-type serpentine walking mechanism |
| CN2359193Y (en)* | 1999-01-20 | 2000-01-19 | 山东矿业学院 | Four-side wheel type snake running mechanism |
| CN1251841C (en)* | 2002-11-06 | 2006-04-19 | 中国科学院沈阳自动化研究所 | Modular snake shaped robot with varistructure |
| US7044245B2 (en)* | 2003-06-17 | 2006-05-16 | Science Applications International Corporation | Toroidal propulsion and steering system |
| CN1291821C (en)* | 2003-09-04 | 2006-12-27 | 中国科学院沈阳自动化研究所 | Snake-shaped robot with ground adaptability |
| CN2774717Y (en)* | 2005-01-17 | 2006-04-26 | 江南大学 | Snaik shape robot of multiple freedom flexible joints |
- 2006
- 2006-09-28CNCNB2006101508401Apatent/CN100410128C/enactiveActive
Cited By (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101265813B (en)* | 2008-05-14 | 2010-04-14 | 哈尔滨工业大学 | Multi-robot system for mine search and detection based on wireless sensor network |
| CN101956564A (en)* | 2010-07-27 | 2011-01-26 | 上海中为智能机器人有限公司 | Autonomous intelligent detection multi-robot system for mine |
| CN101956564B (en)* | 2010-07-27 | 2012-04-04 | 上海中为智能机器人有限公司 | Autonomous intelligent detection multi-robot system for mine |
| CN102069490A (en)* | 2010-11-17 | 2011-05-25 | 武汉理工大学 | Quickly-detachable combined search and rescue robot |
| CN102069490B (en)* | 2010-11-17 | 2012-12-19 | 武汉理工大学 | Quickly-detachable combined search and rescue robot |
| CN102700636A (en)* | 2012-05-30 | 2012-10-03 | 上海大学 | Crawler drive device capable of assisting search and rescue equipment in entering interiors of ruins or pipes |
| CN103507069A (en)* | 2012-06-29 | 2014-01-15 | 新昌县冠阳技术开发有限公司 | Modular device used for assembling multifunctional snakelike disaster relief robot |
| CN103754280B (en)* | 2014-01-24 | 2016-03-02 | 哈尔滨工业大学 | Overturn-preventing surrounding crawler-type mobile mechanism |
| CN103754280A (en)* | 2014-01-24 | 2014-04-30 | 哈尔滨工业大学 | Track-surrounding type overturn-preventing travel mechanism |
| CN103921854A (en)* | 2014-04-03 | 2014-07-16 | 贵州詹阳动力重工有限公司 | Train type caterpillar all-terrain vehicle |
| CN104554501A (en)* | 2015-01-07 | 2015-04-29 | 上海大学 | Crawler type drive device for narrow and small space |
| CN104811671A (en)* | 2015-05-19 | 2015-07-29 | 国家电网公司 | Mobile intelligent video monitoring device |
| CN104811671B (en)* | 2015-05-19 | 2018-03-30 | 国家电网公司 | Movable-type intelligent video monitoring apparatus |
| CN105171716A (en)* | 2015-09-01 | 2015-12-23 | 上海大学 | Multi-joint search-and-rescue robot |
| CN105109566A (en)* | 2015-09-28 | 2015-12-02 | 东南大学 | Cooperation stair climbing control method for caterpillar mobile robots |
| CN105109566B (en)* | 2015-09-28 | 2017-05-17 | 东南大学 | Cooperation stair climbing control method for caterpillar mobile robots |
| CN106428294A (en)* | 2016-09-26 | 2017-02-22 | 原平市丰汇机械制造有限公司 | A zero-deviation trackless train |
| CN107116543A (en)* | 2017-05-24 | 2017-09-01 | 哈尔滨工业大学 | A kind of snake-shaped robot of modular reconfigurable |
| CN109383659A (en)* | 2017-08-13 | 2019-02-26 | 屈娟娟 | A kind of polypody modularized robot that can freely assemble |
| CN109383659B (en)* | 2017-08-13 | 2023-11-10 | 屈娟娟 | Multi-foot modular robot capable of being assembled freely |
| CN108748124A (en)* | 2018-05-28 | 2018-11-06 | 中国科学院自动化研究所 | Snake-shaped robot |
| CN109751048A (en)* | 2019-01-17 | 2019-05-14 | 北京理工大学 | A snake-shaped bionic robot fracture-cavity reservoir survey system and method |
| CN110065054A (en)* | 2019-04-09 | 2019-07-30 | 中国科学院自动化研究所 | Multistage drives master-slave mode snake-shaped robot |
| CN113043256A (en)* | 2019-12-27 | 2021-06-29 | 沈阳新松机器人自动化股份有限公司 | Snakelike joint crawler-type composite robot |
| CN111923032A (en)* | 2020-10-12 | 2020-11-13 | 中国科学院沈阳自动化研究所 | Modular reconfigurable orthogonal joint chain type robot |
| CN113184232A (en)* | 2021-05-18 | 2021-07-30 | 哈尔滨理工大学 | Unit module of space cell robot reconstruction platform |
| CN113184232B (en)* | 2021-05-18 | 2022-01-11 | 哈尔滨理工大学 | A Unit Module of a Space Cell Robot Reconstruction Platform |
| CN116061160A (en)* | 2022-11-28 | 2023-05-05 | 沈阳航空航天大学 | Crawler-type snake-shaped robot for narrow space and movement method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| CN100410128C (en) | 2008-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100410128C (en) | A crawler-type multi-joint articulated robot suitable for search and detection in coal mines | |
| US6774597B1 (en) | Apparatus for obstacle traversion | |
| US6512345B2 (en) | Apparatus for obstacle traversion | |
| CN102141181B (en) | Serpentine robotic crawler | |
| CN106275113B (en) | The joint crawler belt mobile platform mutually compound with wheel and the fire-fighting robot with it | |
| US8571711B2 (en) | Modular robotic crawler | |
| KR101304107B1 (en) | Robot for stairs climbing | |
| CN102358361A (en) | Adaptive multi-road-condition caterpillar composite-driving biomimetic robot | |
| CN104057835B (en) | A kind of universal remote control wheeled mobile robot | |
| CN110293543A (en) | A kind of multistep state snake-shaped robot merging crawler type walking mechanism and snake neck joint | |
| CN202243746U (en) | Self-adaptive crawler-arm compound driven biomimetic robot suitable for various road conditions | |
| CN110217299A (en) | Multifunctional universal humanoid robot chassis | |
| CN108928399A (en) | A kind of absorption type crawler belt climbing mechanism and the climbing robot with it | |
| CN105438291A (en) | Robot moving platform with deformable tracks | |
| CN118478958A (en) | Crawler-type swing arm all-dimensional inspection robot moving platform for large-scale sheep farm | |
| CN103303381B (en) | A kind of search and rescue robot and move mode thereof | |
| CN105539628A (en) | Wheeled leg type cockroach-shaped bio-robot | |
| CN119871359A (en) | Modularized snake-shaped robot applicable to complex terrain and control system thereof | |
| CN112519914B (en) | A wheel-legged robot for field exploration | |
| CN113771028B (en) | A multi-modal four-legged special robot with hand-foot switching | |
| CN113733111B (en) | Wheel leg and foot self-reconfigurable mobile robot | |
| CN203158114U (en) | Intelligent obstacle crossing robot based on Bluetooth control | |
| CN207104929U (en) | A kind of tunnel multifunctional intellectual emergency management and rescue caterpillar type robot | |
| CN112922594B (en) | A mining robot under complex working conditions | |
| CN116873069A (en) | A multi-wheeled mobile robot in complex environment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right | Effective date of registration:20210121 Address after:Room 1107, 11 / F, National University Science Park, Harbin Institute of technology, No. 434, youyou street, Nangang District, Harbin City, Heilongjiang Province, 150006 Patentee after:Harbin Institute of Technology Asset Management Co.,Ltd. Patentee after:Liu Yiwei Address before:150001 No. 92 West straight street, Nangang District, Heilongjiang, Harbin Patentee before:HARBIN INSTITUTE OF TECHNOLOGY | |
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right | Effective date of registration:20210201 Address after:Room 411, No.1 building, China Cloud valley software park, No.9 Songhua Road, Harbin Economic Development Zone, Heilongjiang Province, 150001 Patentee after:Harbin Institute of technology robot Innovation Center Co.,Ltd. Address before:Room 1107, 11 / F, National University Science Park, Harbin Institute of technology, No. 434, youyou street, Nangang District, Harbin City, Heilongjiang Province, 150006 Patentee before:Harbin Institute of Technology Asset Management Co.,Ltd. Patentee before:Liu Yiwei | |
| CP03 | Change of name, title or address | ||
| CP03 | Change of name, title or address | Address after:150000 Room 411, building 1, China Cloud valley software park, No. 9, Songhua Road, haping road concentration area, economic development zone, Harbin, Heilongjiang Province Patentee after:Guochuang Robot Innovation Center (Harbin) Co.,Ltd. Address before:Room 411, No.1 building, China Cloud valley software park, No.9 Songhua Road, Harbin Economic Development Zone, Heilongjiang Province, 150001 Patentee before:Harbin Institute of technology robot Innovation Center Co.,Ltd. |