CN1222711A - A system and method for connecting images in a surrounding field image-based virtual environment - Google Patents
A system and method for connecting images in a surrounding field image-based virtual environmentDownload PDFInfo
- Publication number
- CN1222711A CN1222711ACN 98103910CN98103910ACN1222711ACN 1222711 ACN1222711 ACN 1222711ACN 98103910CN98103910CN 98103910CN 98103910 ACN98103910 ACN 98103910ACN 1222711 ACN1222711 ACN 1222711A
- Authority
- CN
- China
- Prior art keywords
- image
- images
- warped
- vertical
- solution
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07D—HANDLING OF COINS OR VALUABLE PAPERS, e.g. TESTING, SORTING BY DENOMINATIONS, COUNTING, DISPENSING, CHANGING OR DEPOSITING
- G07D5/00—Testing specially adapted to determine the identity or genuineness of coins, e.g. for segregating coins which are unacceptable or alien to a currency
- G07D5/02—Testing the dimensions, e.g. thickness, diameter; Testing the deformation
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Image Processing (AREA)
Abstract
Description
Translated fromChinese本发明主要涉及一种接图工具,利用此接图工具,可很容易地构造出一个环场图像式虚拟环境。The present invention mainly relates to a map connection tool, which can easily construct a virtual environment of ring field image type by using the map connection tool.
在这个现实世界里,要呈现这个多采多姿的世界,图像是最好的工具。过去,在计算机世界里,主要用绘图的方式呈现现实世界的自然景观,一点一滴地用线条慢慢地把所要表现的场景绘制出来。而这种方式需花费许多人力及时间,而且需要特殊且昂贵的计算机设备才能实时地把想要表现的场景经由计算机展现出来,虽然互动性高但缺点多。因此,就有人想要用图像直接来构造虚拟环境。这种方式有许多好处,首先,所需要的计算机设备不需太昂贵,即使是个人计算机就可得到很逼真的效果。再者,构建一个虚拟世界所花的人力与所要构建的景物无关,不管背景多复杂,计算机所花的时间都一样。利用图像来构建一个虚拟世界,首先要利用照相机,把它固定在一个旋转轴上,然后对景物环场拍一圈,便可得到一系列的图像。为了消除照相机镜头扭曲(perspective distortion)的问题,在接图之前,必须把这些图像投影到某一个数学模型(圆柱型或球型)上;然后利用接图器把这些图接合起来以构成一张环场图像;利用这张图像便可构建出真实世界的一个虚拟世界。In this real world, images are the best tool to present this colorful world. In the past, in the computer world, the natural landscape of the real world was mainly presented by drawing, and the scene to be expressed was slowly drawn bit by bit with lines. However, this method takes a lot of manpower and time, and requires special and expensive computer equipment to display the desired scene through the computer in real time. Although it is highly interactive, it has many disadvantages. Therefore, some people want to use images to directly construct virtual environments. This method has many advantages. First, the required computer equipment does not need to be too expensive, and even a personal computer can obtain very realistic effects. Furthermore, the manpower spent on constructing a virtual world has nothing to do with the scene to be constructed, no matter how complex the background is, the time spent by the computer is the same. Using images to construct a virtual world, first use a camera, fix it on a rotation axis, and then take a circle around the scene to get a series of images. In order to eliminate the problem of camera lens distortion (perspective distortion), these images must be projected onto a certain mathematical model (cylindrical or spherical) before connecting the pictures; Surround field image; using this image, a virtual world of the real world can be constructed.
环场图像在实际中有许多应用,例如可应用在电影特技、电子游戏、虚拟购物或教育上。要构建这种环场图,最大的问题就是如何把由照相机拍下来的一系列图串成一张。一个很自然的方法是用手动的方式把这些图接在一起,可是这种方式不太便利,尤其当有很多的图像要接时,更是费时费力。因此利用计算机来自动接图是一种比较便捷的方式。Surround field images have many practical applications, such as movie special effects, video games, virtual shopping or education. To construct this kind of surrounding field map, the biggest problem is how to string together a series of pictures taken by the camera into one. A very natural way is to connect these pictures together manually, but this method is not convenient, especially when there are many pictures to be connected, it is time-consuming and labor-intensive. Therefore, it is a relatively convenient way to use a computer to automatically connect pictures.
在把这些图像接在一起之前,为了克服图像因镜头而扭曲的问题,输入的图像必须投影到某一个数学模型,这个数学模型可以是球型(spherical)或圆柱型(cylindrical)。在实际应用中,球型投影在数据存储时会碰到一些问题,因为在计算机世界里,如果图像接近矩形则比较容易存储。另一个问题是照相机不好安排,位置摆得稍微不适当,图像间就有很大的扭曲及差异,而这会造成接图的困难。基于上述理由,在构建虚拟世界中,最常用到的投影方式为圆柱面投影(cylindrical projection)。Before joining these images together, in order to overcome the problem of image distortion due to the lens, the input image must be projected to a certain mathematical model, which can be spherical or cylindrical. In practice, the spherical projection will encounter some problems in data storage, because in the computer world, if the image is close to a rectangle, it is easier to store. Another problem is that the camera is not well arranged. If the position is slightly inappropriate, there will be a lot of distortion and difference between the images, and this will cause difficulties in connecting the pictures. Based on the above reasons, in constructing the virtual world, the most commonly used projection method is cylindrical projection (cylindrical projection).
参考图2,圆柱面投影数学模型可详细描述如下:矩形PQRS用来表示图像平面10,矩形pqrs用来表示假设的圆柱平面12(cylindrical plane),镜轴中心为O,PQRS将被投影到pqrs,图像平面10外切圆柱平面12,图像平面10中心点为O′,镜头长度为f,圆柱平面的半径为d。假设P(x,y)为图像平面10上的一点,而P(u,v)为P(x,y)在圆柱平面12上的对应点,参考图2,坐标(u,v)可表示如下:
本发明的主要目的在于提供一种智能型接图器,利用这个接图器可把由照相机摄得的一系列图像极有效地接在一起,从而构成一张完整的环场图像。本发明主要是利用图像边(edges)的信息,把一系列不同的图像接起来。本发明还提出一种方法,其利用图像边的信息,找出一系列可能的对应解(matching solutions),再由这些可能的解,利用相关性匹配(correlation matching)确定出最后最佳的解,利用此最佳解,便可把相邻不同的图像接合起来。由于这一组可能解的数目很少,能以极有效的方式把最后解找出来。The main purpose of the present invention is to provide an intelligent image splicer, by which a series of images captured by the camera can be efficiently spliced together to form a complete image of the surrounding field. The present invention mainly connects a series of different images by utilizing the information of image edges. The present invention also proposes a method, which uses the information of the image edge to find a series of possible corresponding solutions (matching solutions), and then uses correlation matching to determine the final best solution from these possible solutions , using this optimal solution, different adjacent images can be spliced together. Since the number of possible solutions in this set is small, the final solution can be found in an extremely efficient manner.
在本发明中,当把两张图像接合在一起时,首先需要把它们投影到某一个圆柱面上,这就是所谓的扭曲(warping)运算,接着从这两张已扭曲过的图像,个别寻找边(edges)的信息,并把这些边的位置记录下来。利用这些边的位置,可以得到一组可能的对应点解。然后从这组解中,可以很有效地利用相关性匹配找到最终解。当找到最终解以后,由于这两张图像的亮度不一致,必须做所谓的混合(blending)运算,即利用一张图像上的一点的亮度以及它在另一张图像上对应点的亮度,根据它们离边界的距离进行加权平均,从而在两张图像变成一张后,在接缝处的亮度显得很平滑。In the present invention, when joining two images together, they first need to be projected onto a certain cylindrical surface, which is the so-called warping operation, and then from the two warped images, find edge information, and record the positions of these edges. Using the positions of these edges, a set of possible corresponding point solutions can be obtained. Then from this set of solutions, correlation matching can be used very efficiently to find the final solution. When the final solution is found, since the brightness of the two images is inconsistent, a so-called blending operation must be performed, that is, using the brightness of a point on one image and the brightness of its corresponding point on the other image, according to their The distance from the border is weighted, so that after two images become one, the brightness at the seam appears smooth.
本发明的特点在于,当检测一张图像的垂直边(vertical edges)时,可利用图像中每一列(column)像素(pixels)梯度值(gradient intensity value)的总和来确定,即对图像中每一列的每一像素分别计算它的梯度值;然后对这一列的像素所有梯度值加以总和平均,此平均值再跟一个预先设定的阈值加以比较;如果这个平均值比阈值大,则这一列有一垂直边的存在;对每一列都作这种运算,就可把所有的垂直边找出。The feature of the present invention is that when detecting the vertical edges of an image, it can be determined by using the sum of the gradient intensity values of each column (column) pixel (pixels) in the image, that is, for each image in the image Each pixel in a column calculates its gradient value separately; then all the gradient values of the pixels in this column are summed and averaged, and the average value is compared with a preset threshold value; if the average value is greater than the threshold value, this column There is a vertical edge; by doing this operation for each column, all vertical edges can be found.
类似地,当寻找一张图像的水平边(horizontal edges)时,可利用图像每一行(row)像素梯度值的总和来决定,即对图像中每一行的每一像素分别计算它的梯度值;然后对这一行的像素所有梯度值加以总和平均,此平均值再跟一个预先设定的阈值加以比较;如果这个平均值比阈值大,则这一行可视为有一水平边的存在;对每一行都作这种运算,就可把所有的水平边找出。Similarly, when looking for the horizontal edges (horizontal edges) of an image, it can be determined by the sum of the gradient values of pixels in each row (row) of the image, that is, its gradient value is calculated separately for each pixel in each row in the image; Then all the gradient values of the pixels in this row are summed and averaged, and the average value is compared with a preset threshold value; if the average value is greater than the threshold value, then this row can be regarded as the existence of a horizontal edge; for each row Doing this kind of operation all the horizontal edges can be found out.
利用垂直边,可推测出所需要的对应解(matching solutions)在x轴上可能的坐标;通常,利用所谓的位移函数(offset function)来产生这组可能的解。它的定义如下:
Pb(j)表示在第b张扭曲图像中第j条垂直边的位置;Pb (j) represents the position of the jth vertical edge in the b distorted image;
Nb表示在第b张扭曲图像中垂直边的数目;和Nb denotes the number of vertical edges in the b-th warped image; and
k为使用者定义的一个变量。假设Np表示所有在第a张扭曲图像中其位移函数d(i,k)值小于一个预定的阈值(threshold)T0的垂直边的边数,由这些其d(i,k)值小于一个预定的阈值T0的垂直边,可以得到d(i,k)的一个平均值A(k)。如果A(k)值小于一个预定阈值(threshold)T1,而且Np大于另一个预定的阈值(threshold)T2,那么k位置就可视为一个可能的对应解在x方向上的坐标。给出不同k值,就可找出所有可能的对应解在x方向上的坐标。k is a variable defined by the user. Suppose Np represents the number of vertical sides whose displacement function d(i,k) value is less than a predetermined threshold (threshold) T0 in the a-th distorted image, and these d(i,k) values are less than An average value A(k) of d(i,k) can be obtained from the vertical side of a predetermined threshold T0 . If the value of A(k) is less than a predetermined threshold (threshold) T1 , and Np is greater than another predetermined threshold (threshold) T2 , then the position k can be regarded as the coordinate of a possible corresponding solution in the x direction. Given different values of k, the coordinates of all possible corresponding solutions in the x direction can be found.
根据本发明的另一方面,本发明提供一种用来有效地把输入的图像接成一张环场图的完整系统,该系统包含一个边缘检测器(edge detector),用来检测第a张图像的垂直或水平边以及在第b张图像中对应的垂直或水平边,此边缘检测器同时记录这些垂直边或水平边的位置。该系统还包括一存储器,用来存储这些垂直或水平边的位置数据,以使进一步处理。该系统同时包含一个可能解产生器(hypothesis generator)和最佳解选择器(optimum hypothesisselector),可能解产生器主要用来从存储于存储器中的垂直或水平边的位置来产生一系列可能的对应解,而最佳解选择器则用来从这一组可能的解利用相关性匹配来选择出最佳的解。According to another aspect of the present invention, the present invention provides a complete system for efficiently concatenating input images into a ring field image, the system includes an edge detector for detecting the ath image and the corresponding vertical or horizontal edge in the b-th image, the edge detector simultaneously records the positions of these vertical or horizontal edges. The system also includes a memory for storing the position data of these vertical or horizontal edges for further processing. The system also includes a possible solution generator (hypothesis generator) and an optimal solution selector (optimum hypothesis selector). The possible solution generator is mainly used to generate a series of possible correspondences from the vertical or horizontal edge positions stored in the memory. solution, and the best solution selector is used to select the best solution from this set of possible solutions by correlation matching.
具体地讲,该系统利用存储器来记录图像数据,该系统包含一个混合引擎(blending engine),用来平滑图像间亮度的差异。两张图像接合起来时,必有共同的重叠区域(common overlapping area)。因为照相情况的不同,此两张图像共同的重叠区域亮度必然不同,可从一张图像取出一点像素来,同时在另一张图像取出其对应的像素,根据它们离边界的距离来进行加权平均,从而使得两张图像在共同重叠的区域的亮度非常平滑。在该系统中,边缘检测器(edge detector)、可能解产生器(hypothesis selector)、最佳解选择器(optimalhypothesis selector)都可包含在一个微处理器中。另外,可以利用外部的存储器(像硬盘)来记录扭曲过的图像(warped images)。Specifically, the system utilizes memory to record image data, and the system includes a blending engine to smooth out differences in brightness between images. When two images are combined, there must be a common overlapping area. Because of the different photographing conditions, the brightness of the common overlapping area of the two images must be different. A pixel can be taken from one image, and the corresponding pixel can be taken from the other image at the same time, and the weighted average can be carried out according to their distance from the boundary. , so that the brightness of the two images in the overlapping area is very smooth. In this system, an edge detector (edge detector), a possible solution generator (hypothesis selector), and an optimal solution selector (optimalhypothesis selector) can all be included in a microprocessor. In addition, an external memory (like a hard disk) can be used to record warped images.
本发明还提供一种预测要被接图的可能解的方法。它基本上利用图像中的垂直或水平边的信息来预测这组可能的解。由于推测准确,这组解的数目很小,因此搜寻的范围被大大地减少,因而可很快找出最终解。在寻找最终解的时候,利用所谓的相关性匹配来得到最终解。因为相关性匹配花费时间较多,本发明提供一个用来事先去掉不必要的相关性匹配的裁剪方法(pruningmethod)。该裁剪方法的原理是,如果当前相关性匹配的值小于一个事先定义的值,则没必要进行更进一步的匹配,因此可事先去掉一些不必要的匹配。这种裁剪方法可减少很多相关性匹配的计算,因此大大提高了接图的效率。与传统的方法比较,本发明不仅在效率方面而且在可靠性方面都有了明显的改善,这主要是因为可事先预测可能的对应解,由于推测准确并且这组解的集合很小,可很快地找出最佳解。The present invention also provides a method of predicting possible solutions to a graph to be spliced. It basically uses information about vertical or horizontal edges in the image to predict the set of possible solutions. Due to the accurate guessing, the number of solutions in this group is very small, so the search range is greatly reduced, so the final solution can be found out quickly. When searching for the final solution, the so-called correlation matching is used to obtain the final solution. Because correlation matching takes more time, the present invention provides a pruning method for removing unnecessary correlation matching in advance. The principle of this pruning method is that if the current correlation matching value is less than a pre-defined value, there is no need to perform further matching, so some unnecessary matching can be removed in advance. This cropping method can reduce a lot of correlation matching calculations, thus greatly improving the efficiency of image joining. Compared with traditional methods, the present invention has obvious improvement not only in terms of efficiency but also in terms of reliability. This is mainly because the possible corresponding solutions can be predicted in advance. quickly find the best solution.
本发明可应用到许多方面,例如虚拟环境、导游系统、电子游戏、地理信息系统、电影特技等。The present invention can be applied to many aspects, such as virtual environments, tour guide systems, electronic games, geographic information systems, movie special effects, etc.
通过参照附图对本发明的详细描述,本发明的目的、特征和优点将变得更加明显,附图中:Objects, features and advantages of the present invention will become more apparent by describing the present invention in detail with reference to the accompanying drawings, in which:
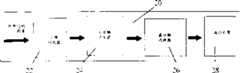
图l表示利用图像来产生虚拟环境的系统分析图;Figure 1 represents a system analysis diagram for generating a virtual environment using an image;
图2是用来说明圆柱投影的几何图;Figure 2 is a geometric diagram used to illustrate cylindrical projection;
图3是实现本发明的方法的系统示意图;Fig. 3 is a schematic diagram of a system realizing the method of the present invention;
图4A和4B以一个实例来说明图3系统的运行;Fig. 4 A and 4B illustrate the operation of Fig. 3 system with an example;
图5用来解释混合(blending)技术如何平滑两张图像之间的亮度;和Figure 5 is used to explain how the blending technique smoothes the brightness between two images; and
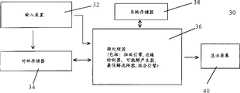
图6一个实现图3方法的计算机结构。FIG. 6 is a computer structure for implementing the method in FIG. 3 .
图3表示整个的接图系统20,其主要原理是利用边的信息(edgeinformation)来确定最后的最佳解。首先,利用边缘检测器22从图像中得到垂直边及水平边的位置。得到这些位置以后,利用可能解产生器24得到一系列可能解。接着,利用最佳解选择器26对这组可能解中的每一个解做最后的确认,从而有效地找出最后解。然后利用这最终解,个别地把相邻的图像接合在一起。为了消除个别图像间亮度的不连续性,可利用混合引擎28来解决这种亮度不连续性的问题。Fig. 3 shows the whole
在该接图系统中,边缘检测器仅使用垂直边和水平边来事先预测相邻图像之间可能的对应解。假设gx(p)代表一张图像中的一点像素p(i,j)在x方向上的梯度值,它的明确表示式为gx(p(i,j))=|I(p(i+l,j))-I(p(i-l,j))|,其中I(p)为像素p在图像中的亮度值。当检测垂直边时,边缘检测器对在同一列的像素累积它们的梯度值。如果这个累积值大于一个事先定义的阈值,则认定这一列中存有一个垂直边,并利用标记来记录这个垂直边的存在。在检测完所有的列以后,可得到所有垂直边的位置。可用相同的方法来寻找水平边的位置。In this graph-joining system, edge detectors use only vertical and horizontal edges to predict possible correspondence solutions between adjacent images in advance. Suppose gx (p) represents the gradient value of a pixel p(i,j) in an image in the x direction, and its explicit expression is gx (p(i,j))=|I(p( i+l,j))-I(p(il,j))|, where I(p) is the brightness value of pixel p in the image. When detecting vertical edges, the edge detector accumulates their gradient values for pixels in the same column. If the cumulative value is greater than a pre-defined threshold, then a vertical edge is assumed to exist in the column, and a flag is used to record the presence of the vertical edge. After detecting all columns, the positions of all vertical edges can be obtained. The same method can be used to find the position of the horizontal edge.
参考图4A和图4B,举一个例子来说明。假设个别的图像Ia和Ib要接合在一起,可利用边缘检测从Ia中得到如下垂直边:(100,y)、(115,y)、(180,y)、(200,y)、(310,y)、(325,y)、(360,y)、(390,y)和(470,y),也可从Ib中得到如下垂直边:(20,y)、(35,y)、(100,y)、(120,y)、(230,y)、(245,y)、(280,y)、(310,y)和(390,y)。由这些垂直边,可只利用它们在x方向上的坐标来得到两组坐标值,即Pa=(100,115,180,200,310,325,360,390,470)和Pb=(20,35,100,120,230,245,280,310,390)。因为这些垂直边彼此对应,Pa和Pb满足下列关系:Pa(i)=Pb(j)+dx,其中i与j一一对应,dx是Pa和Pb之间的偏差(offset)。很明显,dx便是这两张相邻图像在x方向上的对应解(matchedsolution)。但是在某种情况下,由于存在噪声,可能找不到或找错在Ia和Ib的某些垂直边,这造成Pa和Pb之间不再是一一对应的关系。因此在本发明中,提出一种可能解产生器,用于从这些垂直边的信息找出在x方向上的可能对应解。Referring to FIG. 4A and FIG. 4B , an example is given for illustration. Assuming that individual images Ia and Ib are to be joined together, edge detection can be used to obtain the following vertical edges from Ia : (100, y), (115, y), (180, y), (200, y) , (310, y), (325, y), (360, y), (390, y) and (470, y), the following vertical sides can also be obtained from Ib : (20, y), (35 ,y), (100,y), (120,y), (230,y), (245,y), (280,y), (310,y) and (390,y). From these vertical sides, only their coordinates in the x direction can be used to obtain two sets of coordinate values, that is, Pa = (100, 115, 180, 200, 310, 325, 360, 390, 470) and Pb = (20, 35, 100, 120, 230, 245, 280, 310, 390). Because these vertical sides correspond to each other, Pa and Pb satisfy the following relationship: Pa (i)=Pb (j)+dx , where i corresponds to j one-to-one, and dx is the distance between Pa and Pb deviation (offset). Obviously, dx is the corresponding solution (matched solution) of these two adjacent images in the x direction. However, in some cases, due to the existence of noise, some vertical edges between Ia and Ib may not be found or found incorrectly, which results in no one-to-one correspondence between Pa and Pb . Therefore, in the present invention, a possible solution generator is proposed for finding possible corresponding solutions in the x direction from the information of these vertical sides.
假设Na和Nb分别记录Pa和Pb中的元素数目,且令位移函数
在水平边上也可用相同的方式。利用水平边,可以求出可能的对应解在y方向上的坐标。假设这些可能的y坐标构成一个集合Sx。因为Sx和Sy这个集合的元素不多,最终解可由最佳解选择器很快地得到。The same method can also be used on horizontal edges. Using the horizontal edges, the coordinates of the possible corresponding solutions in the y direction can be found. Suppose these possible y-coordinates form a set Sx . Because the set of Sx and Sy has few elements, the final solution can be obtained quickly by the optimal solution selector.
最佳解选择器主要用来从Sx和Sy两集合的并集{S=(x,y)|x∈Sx,y∈Sy}中确定出最佳解。最佳解选择器主要利用相关性匹配来确定最佳解。在相关性匹配的方法中,比较常用的估价函数(measure function)有两个,一个是平均绝对差MAE(mean absolute error),另一个是正则互相关(normalizedcross-correlation),可参照L.G.Broum的论文。它们的定义分别如下:
其中ui和σi为图像Ii的平均值及变化量。(2M+1)2表示匹配视窗的面积。虽然这两个估价函数都适用于确定最佳解,但当速度不是最重要的参考量时,正则互相关匹配是一个比较好的选择,因为它能容忍亮度的差异,但是,如果速度是一个很重要的参考量,则平均绝对误差估价函数是一个比较好的选择。Among them, ui and σi are the average value and variation of image Ii . (2M+1)2 represents the area of the matching window. Although both evaluation functions are suitable for determining the best solution, regularized cross-correlation matching is a better choice when speed is not the most important reference, because it can tolerate differences in brightness. However, if speed is a A very important reference quantity, the mean absolute error evaluation function is a better choice.
通常,计算平均绝对误差(MAE)所花费的时间很多,因此,在本发明中,提出一种裁剪技术(pruning technique),用来加速MAE的计算。首先利用一个矩阵(matrix)来记录在累积计算前一个MAE时MAE的暂时值,用这个矩阵来当做阈值。如果目前的MAE值小于它所对应的阈值(存在于矩阵中),则没有必要进一步累积计算MAE值。采用这种裁剪技术,就可避免许多不必要的相关性计算,因此明显改善了匹配的效率,也可很快地算出最佳解。Usually, it takes a lot of time to calculate the mean absolute error (MAE). Therefore, in the present invention, a pruning technique is proposed to speed up the calculation of MAE. First, a matrix is used to record the temporary value of MAE when the previous MAE is accumulated and calculated, and this matrix is used as a threshold. If the current MAE value is less than its corresponding threshold value (present in the matrix), there is no need to further accumulate MAE values. By adopting this clipping technique, many unnecessary correlation calculations can be avoided, so the efficiency of matching is obviously improved, and the best solution can be calculated quickly.
一旦找到最佳解以后,就可把相邻的两张图像接合起来。可是相邻的两张图像可能有亮度不一致的情况,因此,必须利用所谓的混合技术(blendingtechnique)来消除亮度不一致的问题。参照图5,假设Pi为在图像Ia上的一点,qi为pi在Ib上的对应点,la及lb为Ia及Ib的个别边缘线,da为pi到la的距离,db为qi到lb的距离,如果ri为pi和qi在合成图像I上的对应点,则利用pi和qi,可利用下列的式子得到ri的亮度:
图6是本发明的硬件结构,利用这个结构可以实时地把输入的图像接在一起。输入设备32可以是数码照相机或扫描器,由输入设备可以得到一系列的图像。这些图像可存储在外部存储设备32如硬盘或直接送到微处理器的随机存储器上(RAM),微处理器包括扭曲图像(warpmg images)、边缘检测(edgedetection)、产生可能的解(hypothesis generation)等功能。暂时得到的数据可放到微处理器的RAM上,以提高接图的速度。一旦接图的工作完成,便可以把这些结果直接显示到屏幕上,这些功能可用一般的个人计算机来完成。Fig. 6 is the hardware structure of the present invention, and the input images can be connected together in real time by utilizing this structure. The
以上所图示及说明的为本发明的一优选实施例。根据本发明所覆盖的范围及精神,本发明还可以做多种的变化。What has been illustrated and described above is a preferred embodiment of the present invention. According to the scope and spirit covered by the present invention, various changes can be made in the present invention.
Claims (18)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 98103910CN1090357C (en) | 1998-01-09 | 1998-01-09 | A system and method for connecting images in a surrounding field image-based virtual environment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 98103910CN1090357C (en) | 1998-01-09 | 1998-01-09 | A system and method for connecting images in a surrounding field image-based virtual environment |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1222711Atrue CN1222711A (en) | 1999-07-14 |
| CN1090357C CN1090357C (en) | 2002-09-04 |
Family
ID=5218092
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 98103910Expired - Fee RelatedCN1090357C (en) | 1998-01-09 | 1998-01-09 | A system and method for connecting images in a surrounding field image-based virtual environment |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN1090357C (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102013096A (en)* | 2009-09-04 | 2011-04-13 | 索尼公司 | Method and apparatus for image alignment |
| CN101015199B (en)* | 2004-07-07 | 2011-10-19 | 日本电气株式会社 | Wide field-of-view image input method and device |
| CN101394571B (en)* | 2007-09-21 | 2012-02-08 | 台湾新力国际股份有限公司 | Fast dynamic search method for connecting points |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1297946C (en)* | 2003-10-15 | 2007-01-31 | 财团法人工业技术研究院 | Method of Constructing 3D Regularized Color Model |
- 1998
- 1998-01-09CNCN 98103910patent/CN1090357C/ennot_activeExpired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101015199B (en)* | 2004-07-07 | 2011-10-19 | 日本电气株式会社 | Wide field-of-view image input method and device |
| CN101394571B (en)* | 2007-09-21 | 2012-02-08 | 台湾新力国际股份有限公司 | Fast dynamic search method for connecting points |
| CN102013096A (en)* | 2009-09-04 | 2011-04-13 | 索尼公司 | Method and apparatus for image alignment |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1090357C (en) | 2002-09-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6011558A (en) | Intelligent stitcher for panoramic image-based virtual worlds | |
| US10922844B2 (en) | Image positioning method and system thereof | |
| US5706416A (en) | Method and apparatus for relating and combining multiple images of the same scene or object(s) | |
| US9303525B2 (en) | Method and arrangement for multi-camera calibration | |
| US7471849B2 (en) | Methods and apparatus for shifting perspective in a composite image | |
| US5768447A (en) | Method for indexing image information using a reference model | |
| AU2009205718B2 (en) | Three-dimensional annotations for street view data | |
| CN110111388B (en) | Three-dimensional object pose parameter estimation method and visual equipment | |
| Liu et al. | Indoor localization and visualization using a human-operated backpack system | |
| Zhang et al. | Framebreak: Dramatic image extrapolation by guided shift-maps | |
| Bae et al. | Computational rephotography. | |
| EP1234278B1 (en) | System and method for rectified mosaicing of images recorded by a moving camera | |
| US7936915B2 (en) | Focal length estimation for panoramic stitching | |
| Tau et al. | Dense correspondences across scenes and scales | |
| Fan et al. | Wide-angle image rectification: A survey | |
| CN106530407A (en) | Three-dimensional panoramic splicing method, device and system for virtual reality | |
| Zhu et al. | Large-scale architectural asset extraction from panoramic imagery | |
| CN115330695A (en) | A parking information determination method, electronic device, storage medium and program product | |
| CN117115273A (en) | Camera self-calibration method and system based on badminton court sideline detection | |
| WO2024022301A1 (en) | Visual angle path acquisition method and apparatus, and electronic device and medium | |
| CN109859612A (en) | A kind of method and its system of the three-dimensional annotation of streetscape data | |
| US20080111814A1 (en) | Geometric tagging | |
| CN1090357C (en) | A system and method for connecting images in a surrounding field image-based virtual environment | |
| JP2981520B2 (en) | Image data search method | |
| Park et al. | Estimating the camera direction of a geotagged image using reference images |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| ASS | Succession or assignment of patent right | Owner name:YUDONG TECHNOLOGY CO., LTD. Free format text:FORMER OWNER: INDUSTRIAL TECHNOLOGY RESEARCH INSTITUTE Effective date:20070126 | |
| C41 | Transfer of patent application or patent right or utility model | ||
| TR01 | Transfer of patent right | Effective date of registration:20070126 Address after:Taiwan province of China Patentee after:Transpacific IP Pte Ltd. Address before:Hsinchu County of Taiwan Province Patentee before:Industrial Technology Research Institute | |
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20020904 Termination date:20110109 |