CN116395017A - Steering system for steer-by-wire passenger car, vehicle and control method of steering system - Google Patents
Steering system for steer-by-wire passenger car, vehicle and control method of steering systemDownload PDFInfo
- Publication number
- CN116395017A CN116395017ACN202310344131.0ACN202310344131ACN116395017ACN 116395017 ACN116395017 ACN 116395017ACN 202310344131 ACN202310344131 ACN 202310344131ACN 116395017 ACN116395017 ACN 116395017A
- Authority
- CN
- China
- Prior art keywords
- steering
- steering wheel
- ball
- backup
- steer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/04—Hand wheels
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/021—Determination of steering angle
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/021—Determination of steering angle
- B62D15/0215—Determination of steering angle by measuring on the steering column
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
- B62D5/003—Backup systems, e.g. for manual steering
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及车辆转向技术领域,具体而言,涉及一种线控转向乘用车的转向系统、车辆、转向系统的控制方法。The invention relates to the technical field of vehicle steering, in particular to a steering system of a steer-by-wire passenger car, a vehicle, and a control method for the steering system.
背景技术Background technique
随着汽车技术发展、控制理论应用、驾乘体验需求提升,汽车转向系统由最初的机械转向系统不断发展为液压助力系统、电液助力系统、电动助力系统。随着智能化需求提高、汽车电子技术发展、计算机技术提升,1972年应用于航空领域的线控技术逐步在汽车转向系统上进行应用研究。线控转向系统取消了转向盘与下部转向机之间的机械连接,通过电信号方式将转向盘的输入传递给转向电机执行转向操作,并将路感通过电信号方式传递给转向盘路感模拟电机产生手力等路感反馈。从1998年开始德国ZF、博世公司陆续对线控转向技术进行研究,2015年英菲尼迪推出了全球首款采用线控转向的量产车型—Q50,2022年丰田线控转向车辆bZ4X上市。在智能化大背景下,线控转向技术逐步成为车辆转向系统应用的必选项,它的安全性也成为各大主机厂必须攻克的核心技术难点。With the development of automobile technology, the application of control theory, and the improvement of driving experience requirements, the automobile steering system has continuously developed from the original mechanical steering system to hydraulic power assist system, electro-hydraulic power assist system, and electric power assist system. With the increasing demand for intelligence, the development of automotive electronics technology, and the improvement of computer technology, the control-by-wire technology applied in the aviation field in 1972 was gradually applied to the steering system of automobiles. The steering-by-wire system cancels the mechanical connection between the steering wheel and the lower steering gear, and transmits the input of the steering wheel to the steering motor to perform steering operations through electrical signals, and transmits the road feeling to the steering wheel through electrical signals. The motor generates road sense feedback such as hand force. Since 1998, Germany’s ZF and Bosch have successively conducted research on steer-by-wire technology. In 2015, Infiniti launched the world’s first mass-produced model using steer-by-wire—Q50. In 2022, Toyota’s steer-by-wire vehicle bZ4X will be launched. In the context of intelligence, steer-by-wire technology has gradually become a must for the application of vehicle steering systems, and its safety has also become a core technical difficulty that major OEMs must overcome.
现有技术主要对路感模拟执行器、转向执行器和线控转向控制模块从安全角度进行冗余设计。另外,现有技术提供了一种基于线控转向的双舵驾驶汽车的方向盘接管决策方法,对操纵机构进行了备份,该方案采用正副驾驶双转向盘结构,存在以下不足:占用空间大;要求车辆具备L3及以上智能驾驶级别,否则副驾驶无人或副驾驶人员不会驾驶车辆该专利功能无法使用;目前全球只有日本允许左右舵车辆上路,其他国家都只允许单侧转向盘(1)车辆上路;对于接管决策同样不适用于L3级别以下车辆。In the prior art, redundant design is mainly performed on the road-sensing simulation actuator, the steering actuator and the steer-by-wire control module from the perspective of safety. In addition, the existing technology provides a steering wheel takeover decision-making method for a dual-rudder driving car based on steer-by-wire, which backs up the steering mechanism. The vehicle has an intelligent driving level of L3 or above, otherwise the co-pilot or the co-pilot will not be able to drive the vehicle. This patented function cannot be used; currently only Japan allows left and right steering vehicles on the road, and other countries only allow one-sided steering wheel(1) The vehicle is on the road; the takeover decision is also not applicable to vehicles below the L3 level.
针对上述转向系统在转向盘系统故障时无法保障乘员安全的技术问题,目前尚未提出有效解决方案。For the above-mentioned technical problem that the steering system cannot guarantee the safety of the occupants when the steering wheel system fails, no effective solution has been proposed yet.
发明内容Contents of the invention
本发明的主要目的在于提供一种线控转向乘用车的转向系统、车辆、转向系统的控制方法,以解决现有技术中的转向系统在转向盘系统故障时无法保障乘员安全的问题。The main purpose of the present invention is to provide a steering system of a steer-by-wire passenger car, a vehicle, and a control method for the steering system, so as to solve the problem that the steering system in the prior art cannot guarantee the safety of the occupants when the steering wheel system fails.
为了实现上述目的,根据本发明的一个方面,提供了一种线控转向乘用车的转向系统,转向系统包括:方向盘系统,方向盘系统包括转向盘、第一转角传感器和控制器ECU1,第一转角传感器用于检测转向盘转角信号;备份操纵机构,备份操纵机构包括转向球、第二转角传感器和控制器ECU2,第二转角传感器用于检测转向球转角信号;转向执行机构,转向执行机构包括转向执行器和第三转角传感器,第三转角传感器用于检测转向执行器转角信号;主控制器ECU,主控制器ECU与转向执行机构连接,主控制器ECU可选择地与控制器ECU1、控制器ECU2中的至少一个连接;主控制器ECU与控制器ECU1连接时,方向盘系统控制转向执行机构进行转向动作;主控制器ECU与控制器ECU2连接时,备份操纵机构控制转向执行机构进行转向动作。In order to achieve the above object, according to one aspect of the present invention, a steering system for a steer-by-wire passenger car is provided, the steering system includes: a steering wheel system, the steering wheel system includes a steering wheel, a first rotation angle sensor and a controller ECU1, a The angle sensor is used to detect the steering wheel angle signal; the backup control mechanism, the backup control mechanism includes the steering ball, the second angle sensor and the controller ECU2, the second angle sensor is used to detect the steering ball angle signal; the steering actuator, the steering actuator includes The steering actuator and the third rotation angle sensor, the third rotation angle sensor is used to detect the rotation angle signal of the steering actuator; the main controller ECU, the main controller ECU is connected with the steering actuator, and the main controller ECU can optionally communicate with the controller ECU1, control At least one of the controller ECU2 is connected; when the main controller ECU is connected to the controller ECU1, the steering wheel system controls the steering actuator to perform the steering action; when the main controller ECU is connected to the controller ECU2, the backup control mechanism controls the steering actuator to perform the steering action .
进一步地,转向盘上开设有活动腔,备份操纵机构可活动地设置于活动腔内,备份操纵机构具有隐藏位置和工作位置,备份操纵机构处于隐藏位置时,备份操纵机构全部位于活动腔内,备份操纵机构处于工作位置时,至少部分的转向球位于活动腔外。Further, a movable cavity is provided on the steering wheel, and the backup operating mechanism is movably arranged in the movable cavity. The backup operating mechanism has a hidden position and a working position. When the backup operating mechanism is in the hidden position, the backup operating mechanisms are all located in the movable cavity. When the backup operating mechanism is in the working position, at least part of the steering ball is located outside the movable chamber.
进一步地,备份操纵机构包括:支撑底座,支撑底座具有容纳腔,转向球可旋转地设置于容纳腔内;盖板,盖板与支撑底座连接,盖板上开设有限位开口,至少部分的转向球通过盖板延伸至容纳腔外;驱动机构,驱动机构设置于容纳腔内,驱动机构与支撑底座连接,驱动机构用于驱动支撑底座沿活动腔的高度方向移动至隐藏位置和工作位置;转角检测组件,转角检测组件设置于容纳腔内,转角检测组件至少包括第三转角传感器,转角检测组件与控制器ECU2连接;支撑底座处于工作位置时,转向球的至少部分位于活动腔外,支撑底座处于隐藏位置时,转向球全部位于活动腔内。Further, the backup operating mechanism includes: a support base, the support base has an accommodation cavity, and the steering ball is rotatably arranged in the accommodation cavity; The ball extends to the outside of the accommodation chamber through the cover plate; the driving mechanism is arranged in the accommodation chamber, and the driving mechanism is connected with the supporting base, and the driving mechanism is used to drive the supporting base to move to the hidden position and the working position along the height direction of the movable chamber; the corner The detection assembly, the rotation angle detection assembly is arranged in the accommodating cavity, the rotation angle detection assembly includes at least the third rotation angle sensor, the rotation angle detection assembly is connected with the controller ECU2; when the support base is in the working position, at least part of the steering ball is located outside the movable cavity, and the support base In the stowed position, the steering ball is entirely within the active cavity.
进一步地,驱动机构包括:弹性件,弹性件的第一端与支撑底座的底部连接,弹性件的第二端与活动腔的腔底连接,弹性件沿活动腔的高度方向可伸缩地设置,以带动支撑底座、盖板、转向球沿活动腔的高度方向移动至隐藏位置和工作位置。Further, the driving mechanism includes: an elastic member, the first end of the elastic member is connected to the bottom of the supporting base, the second end of the elastic member is connected to the bottom of the movable chamber, and the elastic member is telescopically arranged along the height direction of the movable chamber, To drive the support base, the cover plate and the steering ball to move to the hidden position and the working position along the height direction of the movable chamber.
进一步地,备份操纵机构还包括:转向球锁止机构,转向球锁止机构为至少一个,转向球锁止机构设置于活动腔的侧壁上,和/或,转向球锁止机构设置于盖板上,和/或,转向球锁止机构设置于支撑底座上;转向球锁止机构具有将转向球与转向盘锁止的锁止位置和将转向球与转向盘释放的释放位置。Further, the backup control mechanism also includes: a steering ball locking mechanism, at least one steering ball locking mechanism, the steering ball locking mechanism is arranged on the side wall of the movable chamber, and/or the steering ball locking mechanism is arranged on the cover On the board, and/or, the steering ball locking mechanism is arranged on the support base; the steering ball locking mechanism has a locking position for locking the steering ball and the steering wheel and a release position for releasing the steering ball and the steering wheel.
进一步地,转向球锁止机构设置于活动腔的侧壁上,锁止位置包括第一锁止位置和第二锁止位置,转向球锁止机构处于第一锁止位置时,转向球锁止机构与支撑底座锁止,转向球锁止机构处于第二锁止位置时,转向球锁止机构与盖板锁止。Further, the steering ball locking mechanism is arranged on the side wall of the movable chamber, and the locking positions include a first locking position and a second locking position. When the steering ball locking mechanism is in the first locking position, the steering ball locking The mechanism is locked with the support base, and when the steering ball locking mechanism is in the second locking position, the steering ball locking mechanism is locked with the cover plate.
根据本发明的另一方面,提供了一种车辆,车辆包括线控转向乘用车的转向系统,线控转向乘用车的转向系统为上述的线控转向乘用车的转向系统。According to another aspect of the present invention, a vehicle is provided. The vehicle includes a steering system for a steer-by-wire passenger vehicle, and the steering system for a steer-by-wire passenger vehicle is the above steering system for a steer-by-wire passenger vehicle.
根据本发明的另一方面,提供了一种线控转向乘用车的转向系统的控制方法,方法用于控制上述的线控转向乘用车的转向系统,方法包括:检测转向盘转角信号和转向执行器转角信号;基于转向盘转角信号和转向执行器转角信号,判断方向盘系统是否故障;在确定方向盘系统发生故障的情况下,生成控制指令集,控制指令集用于控制方向盘系统退出工作模式,并控制备份操纵机构进入工作模式;其中,备份操纵机构进入工作模式时,备份操纵机构控制转向执行机构进行转向动作。According to another aspect of the present invention, a method for controlling the steering system of a steer-by-wire passenger car is provided. The method is used to control the above-mentioned steering system of a steer-by-wire passenger car. The method includes: detecting the steering wheel angle signal and Steering actuator angle signal; based on the steering wheel angle signal and the steering actuator angle signal, it is judged whether the steering wheel system is faulty; when the steering wheel system is determined to be faulty, a control instruction set is generated, and the control instruction set is used to control the steering wheel system to exit the working mode , and control the backup control mechanism to enter the working mode; wherein, when the backup control mechanism enters the working mode, the backup control mechanism controls the steering actuator to perform the steering action.
进一步地,在确定方向盘系统发生故障的情况下,生成控制指令集包括:在确定方向盘系统发生故障的情况下,生成控制指令集中的第一控制指令,第一控制指令用于锁定方向盘系统的转向盘的转角位置;在锁定方向盘系统的转向盘的转角位置后,生成控制指令集中的第二控制指令,第二控制指令用于控制备份操纵机构由隐藏位置移动至工作位置并锁止;在备份操纵机构已经锁止在工作位置的情况下,生成控制指令集中的第三控制指令,第三控制指令用于控制主控制器ECU断开与控制器ECU1的连接,并控制主控制器ECU与控制器ECU2连接;检测车轮当前转角,并调节转向球转角至转向球转角与转向执行器转角一致;确定转向球转角与转向执行器转角一致的情况下,转动转向球,以控制转向执行机构进行转向动作。Further, when it is determined that the steering wheel system is faulty, generating the control instruction set includes: when it is determined that the steering wheel system is faulty, generating a first control instruction in the control instruction set, the first control instruction is used to lock the steering wheel system The angular position of the steering wheel; after locking the angular position of the steering wheel of the steering wheel system, generate the second control command in the control command set, the second control command is used to control the backup operating mechanism to move from the hidden position to the working position and lock; in the backup When the operating mechanism has been locked at the working position, generate the third control command in the control command set, the third control command is used to control the main controller ECU to disconnect the connection with the controller ECU1, and control the main controller ECU to communicate with the control Connect to the ECU2; detect the current rotation angle of the wheel, and adjust the steering ball rotation angle until the steering ball rotation angle is consistent with the steering actuator rotation angle; when it is determined that the steering ball rotation angle is consistent with the steering actuator rotation angle, turn the steering ball to control the steering actuator for steering action.
进一步地,基于转向盘转角信号和转向执行器转角信号,判断方向盘系统是否故障,包括:判断转向执行器转角信号与转向盘转角信号是否一致;在转向执行器转角信号与转向盘转角信号不一致的情况下,确定方向盘系统发生故障。Further, based on the steering wheel angle signal and the steering actuator angle signal, judging whether the steering wheel system is faulty includes: judging whether the steering actuator angle signal is consistent with the steering wheel angle signal; if the steering actuator angle signal is inconsistent with the steering wheel angle signal In this case, it is determined that the steering wheel system is malfunctioning.
应用本发明的技术方案,通过设置方向盘系统、备份操纵机构、转向执行机构、主控制器ECU,当方向盘系统发生故障时,主控制器ECU可选择断开与方向盘系统的连接,并与备份操纵机构连接,以使备份操纵机构在方向盘系统发生故障失效时接管车辆的转向,由驾驶员进行转向操纵,解决了现有技术中车辆转向系统在转向盘系统故障时无法保障乘员安全的技术问题,有效保障车内乘员安全。Applying the technical scheme of the present invention, by setting the steering wheel system, the backup steering mechanism, the steering actuator, and the main controller ECU, when the steering wheel system fails, the main controller ECU can choose to disconnect the steering wheel system and connect with the backup steering wheel system. The mechanism is connected so that the backup control mechanism takes over the steering of the vehicle when the steering wheel system fails, and the driver performs the steering operation, which solves the technical problem that the vehicle steering system in the prior art cannot guarantee the safety of the occupants when the steering wheel system fails. Effectively guarantee the safety of occupants in the vehicle.
附图说明Description of drawings
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:The accompanying drawings constituting a part of the present application are used to provide a further understanding of the present invention, and the schematic embodiments and descriptions of the present invention are used to explain the present invention, and do not constitute an improper limitation of the present invention. In the attached picture:
图1示出了根据本发明的线控转向乘用车的转向系统的实施例的原理示意图;Fig. 1 shows a schematic diagram of the principle of an embodiment of a steering system of a steer-by-wire passenger car according to the present invention;
图2示出了根据本发明的备份操纵机构的第一实施例的结构示意图;Fig. 2 shows a schematic structural view of the first embodiment of the backup manipulation mechanism according to the present invention;
图3示出了根据本发明的备份操纵机构的第二实施例的结构示意图;Fig. 3 shows the structural representation of the second embodiment of the backup manipulation mechanism according to the present invention;
图4示出了根据本发明的备份操纵机构的第三实施例的结构示意图;Fig. 4 shows the schematic structural view of the third embodiment of the backup manipulation mechanism according to the present invention;
图5示出了根据本发明的线控转向乘用车的转向系统的控制方法的实施例的流程示意图;Fig. 5 shows a schematic flowchart of an embodiment of a control method for a steering system of a steer-by-wire passenger car according to the present invention;
图6示出了根据本发明的车辆的电子装置的硬件结构框图;FIG. 6 shows a block diagram of the hardware structure of the electronic device of the vehicle according to the present invention;
图7示出了根据本发明的线控转向乘用车的转向系统的控制装置的实施例的结构框图。Fig. 7 shows a structural block diagram of an embodiment of a control device for a steering system of a steer-by-wire passenger vehicle according to the present invention.
其中,上述附图包括以下附图标记:Wherein, the above-mentioned accompanying drawings include the following reference signs:
1、转向盘;100、活动腔;1, steering wheel; 100, movable chamber;
2、支撑底座;200、容纳腔;2. Support base; 200. Accommodating cavity;
3、转向球;4、盖板;5、弹性件;6、转向球锁止机构;3. Steering ball; 4. Cover plate; 5. Elastic parts; 6. Steering ball locking mechanism;
7、转角传感器;8、旋转轴;9、转向执行器;A、摩擦点。7. Angle sensor; 8. Rotary shaft; 9. Steering actuator; A. Friction point.
具体实施方式Detailed ways
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。It should be noted that the terminology used here is only for describing specific implementations, and is not intended to limit the exemplary implementations according to the present application. As used herein, unless the context clearly dictates otherwise, the singular is intended to include the plural, and it should also be understood that when the terms "comprising" and/or "comprising" are used in this specification, they mean There are features, steps, operations, means, components and/or combinations thereof.
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的术语在适当情况下可以互换,以便这里描述的本申请的实施方式例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。It should be noted that the terms "first" and "second" in the description and claims of the present application and the above drawings are used to distinguish similar objects, but not necessarily used to describe a specific sequence or sequence. It is to be understood that the terms so used are interchangeable under appropriate circumstances such that the embodiments of the application described herein are, for example, capable of operation in sequences other than those illustrated or described herein. Furthermore, the terms "comprising" and "having", as well as any variations thereof, are intended to cover a non-exclusive inclusion, for example, a process, method, system, product or device comprising a sequence of steps or elements is not necessarily limited to the expressly listed instead, may include other steps or elements not explicitly listed or inherent to the process, method, product or apparatus.
现在,将参照附图更详细地描述根据本申请的示例性实施方式。然而,这些示例性实施方式可以由多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的实施方式。应当理解的是,提供这些实施方式是为了使得本申请的公开彻底且完整,并且将这些示例性实施方式的构思充分传达给本领域普通技术人员,在附图中,为了清楚起见,有可能扩大了层和区域的厚度,并且使用相同的附图标记表示相同的器件,因而将省略对它们的描述。Now, exemplary embodiments according to the present application will be described in more detail with reference to the accompanying drawings. These example embodiments may, however, be embodied in many different forms and should not be construed as limited to only the embodiments set forth herein. It should be understood that these embodiments are provided so that this disclosure will be thorough and complete and will fully convey the concept of these exemplary embodiments to those of ordinary skill in the art. The thicknesses of layers and regions are indicated, and the same reference numerals are used to designate the same devices, and thus their descriptions will be omitted.
结合图1至图4所示,根据本申请的具体实施例,提供了一种线控转向乘用车的转向系统。Referring to FIGS. 1 to 4 , according to a specific embodiment of the present application, a steering system for a steer-by-wire passenger car is provided.
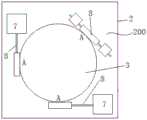
具体地,转向系统包括方向盘系统、备份操纵机构和主控制器ECU,方向盘系统包括转向盘1、第一转角传感器和控制器ECU1,第一转角传感器用于检测转向盘转角信号;备份操纵机构包括转向球3、第二转角传感器和控制器ECU2,第二转角传感器用于检测转向球转角信号;转向执行机构,转向执行机构包括转向执行器和第三转角传感器,第三转角传感器用于检测转向执行器转角信号;主控制器ECU与转向执行机构连接,主控制器ECU可选择地与控制器ECU1、控制器ECU2中的至少一个连接;主控制器ECU与控制器ECU1连接时,方向盘系统控制转向执行机构进行转向动作;主控制器ECU与控制器ECU2连接时,备份操纵机构控制转向执行机构进行转向动作。Specifically, the steering system includes a steering wheel system, a backup operating mechanism and a main controller ECU, the steering wheel system includes a steering wheel 1, a first angle sensor and a controller ECU1, and the first angle sensor is used to detect the steering wheel angle signal; the backup operating mechanism includes
应用本实施例的技术方案,通过设置方向盘系统、备份操纵机构、转向执行机构、主控制器ECU,当方向盘系统发生故障时,主控制器ECU可选择断开与方向盘系统的连接,并与备份操纵机构连接,以使备份操纵机构在方向盘系统发生故障失效时接管车辆的转向,由驾驶员进行转向操纵,解决了现有技术中车辆转向系统在转向盘系统故障时无法保障乘员安全的技术问题,有效保障车内乘员安全。Applying the technical solution of this embodiment, by setting the steering wheel system, the backup operating mechanism, the steering actuator, and the main controller ECU, when the steering wheel system fails, the main controller ECU can choose to disconnect the steering wheel system and connect with the backup The control mechanism is connected so that the backup control mechanism takes over the steering of the vehicle when the steering wheel system fails, and the driver performs the steering operation, which solves the technical problem that the vehicle steering system cannot guarantee the safety of the occupants when the steering wheel system fails in the prior art , Effectively guarantee the safety of the occupants in the car.
需要说明的是,本实施例中的线控转向乘用车为单侧驾驶车辆,即仅有主驾驶座上设置有方向盘系统。相比于现有技术中设置正副驾驶双转向盘结构的方案,本实施例的单侧设置方向盘系统的方案更符合实际应用场景,具有更高的实用性。It should be noted that the steer-by-wire passenger car in this embodiment is a one-sided drive vehicle, that is, only the main driver's seat is provided with a steering wheel system. Compared with the solution in the prior art with dual steering wheel structure for the driver and co-pilot, the solution of the single-side steering wheel system in this embodiment is more in line with the actual application scene and has higher practicability.
进一步地,转向盘1上开设有活动腔100,备份操纵机构可活动地设置于活动腔100内,备份操纵机构具有隐藏位置和工作位置,备份操纵机构处于隐藏位置时,备份操纵机构全部位于活动腔100内,备份操纵机构处于工作位置时,至少部分的转向球3位于活动腔100外。这样设置将方向盘系统与备份操纵机构集成,可减少备份操纵机构占用的车内空间,便于车内布置。Further, a
在本申请的一个示范性实施例中,活动腔100开设于转向盘1的几何中心处,备份操纵机构沿活动腔100的深度方向可移动地设置,以使得备份操纵机构移动至隐藏位置和工作位置。可选地,转向盘1上还可以设置活动板,活动板具有封堵活动腔100的开口的封堵位置和打开活动腔100的开口的打开位置,当备份操纵机构移动至隐藏位置时,活动板位于封堵位置,以避免杂物落入活动腔100内,当备份操纵机构即将移动至工作位置时,活动板移动至打开位置。活动板的设置可根据实际需要进行调整,例如,可以令活动板沿转向盘1表面滑动设置,也可以令活动板相对活动腔100的开口可转动地设置,活动板可以为一块单独的板体,也可以为两块板体,两块板体具有连接状态和分离状态,当两块板体连接时,封堵活动腔100的开口,当两块板体分离时,打开活动腔100的开口。相应地,还可以为活动板设置对应的锁止机构,以将活动板锁紧在封堵位置或打开位置。In an exemplary embodiment of the present application, the
进一步地,备份操纵机构包括支撑底座2、盖板4、驱动机构和转角检测组件,支撑底座2具有容纳腔200,转向球3可旋转地设置于容纳腔200内;盖板4与支撑底座2连接,盖板4上开设有限位开口,至少部分的转向球3通过盖板4延伸至容纳腔200外;驱动机构设置于容纳腔200内,驱动机构与支撑底座2连接,驱动机构用于驱动支撑底座2沿活动腔100的高度方向移动至隐藏位置和工作位置;转角检测组件设置于容纳腔200内,转角检测组件至少包括第三转角传感器,转角检测组件与控制器ECU2连接;支撑底座2处于工作位置时,转向球3的至少部分位于活动腔100外,支撑底座2处于隐藏位置时,转向球3全部位于活动腔100内。通过设置支撑底座2,实现对转向球3的定位限位,盖板4可以对转向球3进行限位作用,部分的转向球3通过盖板4延伸至容纳腔200外以供驾驶员操作转向,剩余的转向球3位于容纳腔200内,盖板4可避免转向球3从容纳腔200内脱出,盖板4与支撑底座2可以为一体化设置。Further, the backup manipulation mechanism includes a
优选地,转角检测组件包括转角传感器7和旋转轴8,如图3所示,具体地,在本申请的一个示范性实施例中,共设置三个旋转轴8和两个转角传感器7,其中两个旋转轴8与转角传感器7连接,另一个旋转轴8未连接转角传感器7,旋转轴8与转向球3的摩擦点为A,转角传感器7与控制器ECU2连接(图中未示出),转向球3转动时,通过摩擦点A的摩擦力带动旋转轴8转动,转角传感器7将转向球3的转向球转角信号传输至控制器ECU2。在本实施例中,三个旋转轴8的设置可以使转向球3受到均衡的作用力,避免转向球3转动时发生晃动、偏移等,优选地,三个旋转轴8沿转向球3的周向均匀设置,相邻两个旋转轴8与转向球3的几何中心之间的夹角相等地设置。根据实际需要,也可以设置四个、五个、六个等数目的旋转轴8和转角传感器7,以获得多个测量数据,经过误差计算获得最准确的转向球转角,减小测量误差。Preferably, the rotation angle detection assembly includes a
可选地,驱动机构具有多种具体实施方式,例如,可以在活动腔100的腔壁上设置导轨组件,以与支撑底座2上设置的相应组件配合,实现支撑底座2沿活动腔100的高度方向的移动,导轨组件可以为滑轨、滑槽、齿条、齿轮传动机构,支撑底座2上可以设置相应的滑轮、齿轮传动结构、齿条结构等。又例如,可以在活动腔100的底部设置举升机构,举升机构与支撑底座2的底部连接,举升机构可带动支撑底座2沿活动腔100的高度方向移动,举升机构可以为升降气缸等结构。Optionally, the drive mechanism has multiple specific implementations. For example, a guide rail assembly can be provided on the cavity wall of the
进一步地,驱动机构包括弹性件5,弹性件5的第一端与支撑底座2的底部连接,弹性件5的第二端与活动腔100的腔底连接,弹性件5沿活动腔100的高度方向可伸缩地设置,以带动支撑底座2、盖板4、转向球3沿活动腔100的高度方向移动至隐藏位置和工作位置。弹性件5的设置使得转向球3的位置切换更便捷,当方向盘系统发生故障需要进行人工驾驶转向时,转向球3可通过弹性件5的弹力进行快速的位置切换,节省操作时间,同时也进一步地提升车辆的行驶安全性能。Further, the drive mechanism includes an
优选地,弹性件5为伸缩弹簧,伸缩弹簧具有初始状态和压缩状态,当伸缩弹簧处于初始状态时,转向球3处于工作位置,当伸缩弹簧处于压缩状态时,转向球3处于隐藏位置。这样可使得启用转向球3时,只需借助伸缩弹簧自身的弹力即可将转向球3弹出,且弹出过程为自动过程,时间较短,当需要收纳转向球3时,驾乘人员从外部将转向球3压回活动腔100内即可,转向球3的弹出和收回更省力便捷。应当明白的是,转向球3的收回过程也可以由额外设置的压缩机构进行,即可以在活动腔100内设置压缩机构,以用于将转向球3收回活动腔100内。Preferably, the
进一步地,备份操纵机构还包括转向球锁止机构6,转向球锁止机构6为至少一个,转向球锁止机构6设置于活动腔100的侧壁上,和/或,转向球锁止机构6设置于盖板4上,和/或,转向球锁止机构6设置于支撑底座2上;转向球锁止机构6具有将转向球3与转向盘1锁止的锁止位置和将转向球3与转向盘1释放的释放位置。Further, the backup steering mechanism also includes a steering
应当明白的是,根据实际需要,转向球锁止机构6为多个时,多个转向球锁止机构6可以沿支撑底座2的周向均匀分布,转向球3与转向盘1锁止后受力均衡,避免发生偏移晃动。It should be understood that, according to actual needs, when there are multiple steering
具体地,本方案中的支撑底座2为矩形截面,可以根据矩形截面的各个边的尺寸设置转向球锁止机构6的数目,可选地,当支撑底座2为圆柱形时,可以沿支撑底座2的周向均匀设置转向球锁止机构6。Specifically, the
具体地,转向球锁止机构6具有多种实施方式,能实现转向球3、支撑底座2、盖板4中任意一个与转向盘1的锁止功能即可,例如,转向球锁止机构6可以为沿活动腔100的侧壁方向可伸缩设置的限位凸起结构,支撑底座2与盖板4中任意一个的周面上设置有相应的卡槽结构或限位孔结构,限位凸起结构延伸至卡槽结构或限位孔结构内时,即实现锁止。转向球锁止机构6也可以为普通可伸缩的限位板结构,当转向球3、支撑底座2、盖板4退回至隐藏位置时,限位板结构伸出,此时限位板结构与盖板4的上表面搭接,设置合理的限位板结构的强度,即可实现对转向球3、支撑底座2、盖板4的锁止。可选地,此处的限位板结构、限位凸起结构可以为设置于活动腔100的侧壁上的环形结构,卡槽结构可以是对应的环形卡槽。Specifically, the steering
进一步地,转向球锁止机构6设置于活动腔100的侧壁上,锁止位置包括第一锁止位置和第二锁止位置,转向球锁止机构6处于第一锁止位置时,转向球锁止机构6与支撑底座2锁止,转向球锁止机构6处于第二锁止位置时,转向球锁止机构6与盖板4锁止。如图2所示,此时转向球锁止机构6处于第一锁止位置,至少部分的转向球3位于活动腔100外,锁止后可操作转向球3进行转向操作,避免支撑底座2晃动或移动。Further, the steering
具体地,支撑底座2与盖板4上均可以设置与转向球锁止机构6对应的配合机构,以实现对支撑底座2与盖板4的锁止,也可以仅在支撑底座2上设置配合机构,例如,转向球锁止机构6处于第二锁止位置时,至少部分的转向球锁止机构6与盖板4的上表面抵接,以将转向球3固定于隐藏位置。Specifically, both the
上述实施例中的转向系统,备份操纵机构隐藏在转向盘1中,当方向盘系统转向失效时备份操纵机构弹出,备份操纵机构代替原有方向盘系统,由驾驶员进行转向操纵,有效保障车内乘员安全。备份操纵机构隐藏在转向盘1中,占用空间小;转向系统设置在驾驶员侧,方便驾驶员操作,本实施例中的,备份操纵机构不受自动驾驶级别限制,具有更强的实用性。In the steering system in the above embodiment, the backup control mechanism is hidden in the steering wheel 1. When the steering wheel system fails to turn, the backup control mechanism pops up, and the backup control mechanism replaces the original steering wheel system. Safety. The backup control mechanism is hidden in the steering wheel 1 and takes up little space; the steering system is arranged on the driver's side, which is convenient for the driver to operate. In this embodiment, the backup control mechanism is not limited by the level of automatic driving and has stronger practicability.
根据本申请的另一具体实施例,提供了一种车辆,车辆包括线控转向乘用车的转向系统,线控转向乘用车的转向系统为上述的线控转向乘用车的转向系统。具体地,车辆可以为具有自动驾驶功能的智能车辆。According to another specific embodiment of the present application, a vehicle is provided. The vehicle includes a steering system for a steer-by-wire passenger car, and the steering system for a steer-by-wire passenger car is the above-mentioned steering system for a steer-by-wire passenger car. Specifically, the vehicle may be an intelligent vehicle with an automatic driving function.
根据本发明其中一实施例,提供了一种线控转向乘用车的转向系统的控制方法的实施例,需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。According to one embodiment of the present invention, an embodiment of a control method for a steering system of a steer-by-wire passenger car is provided. Instructions are executed in a computer system and, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
该方法实施例可以在车辆中包含存储器和处理器的电子装置或者类似的运算装置中执行。以运行在车辆的电子装置上为例,如图6所示,车辆的电子装置可以包括一个或多个处理器102(处理器可以包括但不限于中央处理器(CPU)、图形处理器(GPU)、数字信号处理(DSP)芯片、微处理器(MCU)、可编程逻辑器件(FPGA)、神经网络处理器(NPU)、张量处理器(TPU)、人工智能(AI)类型处理器等的处理装置)和用于存储数据的存储器104。可选地,上述车辆的电子装置还可以包括用于通信功能的传输设备106、输入输出设备108以及显示器110。本领域普通技术人员可以理解,图6所示的结构仅为示意,其并不对上述车辆的电子装置的结构造成限定。例如,车辆的电子装置还可包括比上述结构描述更多或者更少的组件,或者具有与上述结构描述不同的配置。The method embodiments may be implemented in an electronic device including a memory and a processor or a similar computing device in a vehicle. Taking the electronic device running on the vehicle as an example, as shown in FIG. ), digital signal processing (DSP) chip, microprocessor (MCU), programmable logic device (FPGA), neural network processor (NPU), tensor processor (TPU), artificial intelligence (AI) type processor, etc. processing means) and a
存储器104可用于存储计算机程序,例如,应用软件的软件程序以及模块,如本发明实施例中的信息处理方法对应的计算机程序,处理器102通过运行存储在存储器104内的计算机程序,从而执行各种功能应用以及数据处理,即实现上述的信息处理方法。存储器104可包括高速随机存储器,还可包括非易失性存储器,如一个或者多个磁性存储装置、闪存、或者其他非易失性固态存储器。在一些实例中,存储器104可进一步包括相对于处理器102远程设置的存储器,这些远程存储器可以通过网络连接至移动终端。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。The
传输设备106用于经由一个网络接收或者发送数据。上述的网络具体实例可包括移动终端的通信供应商提供的无线网络。在一个实例中,传输设备106包括一个网络适配器(Network Interface Controller,简称为NIC),其可通过基站与其他网络设备相连从而可与互联网进行通讯。在一个实例中,传输设备106可以为射频(Radio Frequency,简称为RF)模块,其用于通过无线方式与互联网进行通讯。
显示器110可以例如触摸屏式的液晶显示器(LCD)。该液晶显示器可使得用户能够与移动终端的用户界面进行交互。在一些实施例中,上述移动终端具有图形用户界面(GUI),用户可以通过触摸触敏表面上的手指接触和/或手势来与GUI进行人机交互,此处的人机交互功能可选的包括如下交互:创建网页、绘图、文字处理、制作电子文档、游戏、视频会议、即时通信、收发电子邮件、通话界面、播放数字视频、播放数字音乐和/或网络浏览等,用于执行上述人机交互功能的可执行指令被配置/存储在一个或多个处理器可执行的计算机程序产品或可读存储介质中。The display 110 may be, for example, a touch screen liquid crystal display (LCD). The liquid crystal display may enable a user to interact with a user interface of the mobile terminal. In some embodiments, the above-mentioned mobile terminal has a graphical user interface (GUI), and the user can perform human-computer interaction with the GUI by touching finger contacts and/or gestures on the touch-sensitive surface, and the human-computer interaction function here is optional Including the following interactions: creating web pages, drawing, word processing, creating electronic documents, games, video conferencing, instant messaging, sending and receiving emails, calling interfaces, playing digital videos, playing digital music, and/or web browsing, etc., for performing the above-mentioned human The executable instructions of the computer interaction function are configured/stored in one or more processor-executable computer program products or readable storage media.
本实施例中提供了一种运行于上述车辆的电子装置的线控转向乘用车的转向系统的控制方法,方法用于控制上述的线控转向乘用车的转向系统,图5是根据本发明其中一实施例的线控转向乘用车的转向系统的控制方法的流程图,如图5所示,该流程包括如下步骤::This embodiment provides a method for controlling the steering system of a steer-by-wire passenger car operating on the electronic device of the above-mentioned vehicle. The method is used to control the steering system of the above-mentioned steer-by-wire passenger car. A flow chart of a control method for a steering system of a steer-by-wire passenger car according to one embodiment of the invention is shown in FIG. 5. The process includes the following steps:
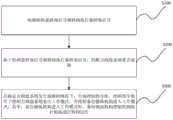
步骤S100,检测转向盘转角信号和转向执行器转角信号;Step S100, detecting the steering wheel angle signal and the steering actuator angle signal;
步骤S200,基于转向盘转角信号和转向执行器转角信号,判断方向盘系统是否故障;Step S200, based on the steering wheel angle signal and the steering actuator angle signal, determine whether the steering wheel system is faulty;
步骤S300,在确定方向盘系统发生故障的情况下,生成控制指令集,控制指令集用于控制方向盘系统退出工作模式,并控制备份操纵机构进入工作模式;其中,备份操纵机构进入工作模式时,备份操纵机构控制转向执行机构进行转向动作。Step S300, when it is determined that the steering wheel system fails, generate a control instruction set, the control instruction set is used to control the steering wheel system to exit the working mode, and control the backup control mechanism to enter the working mode; wherein, when the backup control mechanism enters the working mode, the backup The steering mechanism controls the steering actuator to perform the steering action.
通过上述步骤,检测转向盘转角信号和转向执行器转角信号,基于转向盘转角信号和转向执行器转角信号,判断方向盘系统是否故障,在确定方向盘系统发生故障的情况下,生成控制指令集,控制指令集用于控制方向盘系统退出工作模式,并控制备份操纵机构进入工作模式,备份操纵机构进入工作模式时,备份操纵机构控制转向执行机构进行转向动作。使得当方向盘系统发生故障时,及时由备份操纵机构控制接管转向操纵,避免车辆由于方向盘系统故障引起的安全问题,有效保障驾乘人员安全。Through the above steps, the steering wheel angle signal and the steering actuator angle signal are detected, based on the steering wheel angle signal and the steering actuator angle signal, it is judged whether the steering wheel system is faulty, and when the steering wheel system is determined to be faulty, a control instruction set is generated to control The instruction set is used to control the steering wheel system to exit the working mode, and to control the backup control mechanism to enter the working mode. When the backup control mechanism enters the working mode, the backup control mechanism controls the steering actuator to perform the steering action. Therefore, when the steering wheel system fails, the backup control mechanism takes over the steering control in time, avoiding the safety problems of the vehicle caused by the steering wheel system failure, and effectively ensuring the safety of drivers and passengers.
可选地,步骤S300中,在确定方向盘系统发生故障的情况下,生成控制指令集包括:Optionally, in step S300, when it is determined that the steering wheel system fails, generating the control instruction set includes:
步骤S310,在确定方向盘系统发生故障的情况下,生成控制指令集中的第一控制指令,第一控制指令用于锁定方向盘系统的转向盘1的转角位置;Step S310, when it is determined that the steering wheel system is faulty, generate a first control command in the control command set, the first control command is used to lock the angle position of the steering wheel 1 of the steering wheel system;
步骤S320,在锁定方向盘系统的转向盘1的转角位置后,生成控制指令集中的第二控制指令,第二控制指令用于控制备份操纵机构由隐藏位置移动至工作位置并锁止;Step S320, after locking the corner position of the steering wheel 1 of the steering wheel system, generating a second control command in the control command set, the second control command is used to control the backup operating mechanism to move from the hidden position to the working position and lock it;
步骤S330,在备份操纵机构已经锁止在工作位置的情况下,生成控制指令集中的第三控制指令,第三控制指令用于控制主控制器ECU断开与控制器ECU1的连接,并控制主控制器ECU与控制器ECU2连接;Step S330, in the case that the backup operating mechanism has been locked at the working position, generate a third control instruction in the control instruction set, the third control instruction is used to control the main controller ECU to disconnect from the controller ECU1, and control the main controller ECU to disconnect from the controller ECU1. The controller ECU is connected with the controller ECU2;
步骤S340,检测车轮当前转角,并调节转向球转角至转向球转角与转向执行器转角一致;Step S340, detecting the current rotation angle of the wheel, and adjusting the rotation angle of the steering ball until the rotation angle of the steering ball is consistent with the rotation angle of the steering actuator;
步骤S350,确定转向球转角与转向执行器转角一致的情况下,转动转向球,以控制转向执行机构进行转向动作。Step S350, when it is determined that the steering ball rotation angle is consistent with the steering actuator rotation angle, turn the steering ball to control the steering actuator to perform a steering action.
通过上述步骤,确定方向盘系统发生故障时,首先锁定方向盘系统的转向盘1的转角位置,然后控制备份操纵机构由隐藏位置移动至工作位置并锁止,此时再断开主控制器ECU与控制器ECU1的连接,可避免在备份操纵机构尚未准备完成时进行转向接管可能引起的连接问题,接管后,检测车轮当前转角,并调节转向球转角至转向球转角与转向执行器转角一致,以使得后续转向控制时转向球转角与转向执行器转角保持一致,便于驾驶员转向操作。Through the above steps, when it is determined that the steering wheel system fails, first lock the corner position of the steering wheel 1 of the steering wheel system, then control the backup control mechanism to move from the hidden position to the working position and lock it, and then disconnect the main controller ECU and control The connection of the ECU1 can avoid the connection problem that may be caused by the steering takeover when the backup control mechanism is not ready. During the subsequent steering control, the steering ball rotation angle is consistent with the steering actuator rotation angle, which is convenient for the driver to operate the steering.
可选地,在步骤S200中,基于转向盘转角信号和转向执行器转角信号,判断方向盘系统是否故障,包括:Optionally, in step S200, based on the steering wheel angle signal and the steering actuator angle signal, it is judged whether the steering wheel system is faulty, including:
步骤S210,判断转向执行器转角信号与转向盘转角信号是否一致;Step S210, judging whether the steering actuator rotation angle signal is consistent with the steering wheel rotation angle signal;
步骤S220,在转向执行器转角信号与转向盘转角信号不一致的情况下,确定方向盘系统发生故障。Step S220, if the steering actuator rotation angle signal is inconsistent with the steering wheel rotation angle signal, it is determined that the steering wheel system is faulty.
通过上述步骤,转向执行器转角信号与转向盘转角信号不一致时,即可确定方向盘系统发生故障,及时切换转向操作系统,避免车辆行驶安全问题。需要说明的是,转向执行器转角信号与转向盘转角信号不一致可以指转向执行器转角信号与转向盘转角信号超出预设误差范围,即允许转向执行器转角信号与转向盘转角信号存在合理误差,当转向执行器转角信号与转向盘转角信号差异较大时,确定方向盘系统发生故障,合理误差范围可以根据转向精度、车辆行驶要求等进行确定。Through the above steps, when the steering actuator rotation angle signal is inconsistent with the steering wheel rotation angle signal, it can be determined that the steering wheel system is faulty, and the steering operating system can be switched in time to avoid vehicle driving safety problems. It should be noted that the inconsistency between the angle signal of the steering actuator and the angle signal of the steering wheel may mean that the angle signal of the steering actuator and the angle signal of the steering wheel exceed the preset error range, that is, a reasonable error between the angle signal of the steering actuator and the angle signal of the steering wheel is allowed. When there is a large difference between the steering actuator angle signal and the steering wheel angle signal, it is determined that the steering wheel system is faulty, and the reasonable error range can be determined according to steering accuracy and vehicle driving requirements.
本实施例中提供了一种线控转向乘用车的转向系统的控制方法的优选实施例,转向通过方向盘系统和主控制器ECU控制实现,转向控制的接管由故障检测结果决定,方法包括以下步骤:This embodiment provides a preferred embodiment of the control method of the steering system of a steer-by-wire passenger car. The steering is realized through the control of the steering wheel system and the main controller ECU. The takeover of the steering control is determined by the fault detection result. The method includes the following step:
1、控制器ECU1对方向盘转角信号、转向执行器转角信号进行判断;1. The controller ECU1 judges the steering wheel angle signal and the steering actuator angle signal;
2、当转向盘转角信号有变化,转向执行器转角信号无变化时,转向盘1在该位置锁死;。2. When the steering wheel angle signal changes but the steering actuator angle signal does not change, the steering wheel 1 is locked at this position;
3、备份操纵机构弹出,并在垂直方向锁死;3. The backup control mechanism pops up and locks in the vertical direction;
4、主控制器ECU从与ECU1连接切换为与ECU2连接,由备份操纵机构接管转向功能。4. The main controller ECU is switched from being connected with ECU1 to being connected with ECU2, and the backup control mechanism takes over the steering function.
5、基于当前车轮转角,将转向球转角与转向执行器转角对正。5. Based on the current wheel angle, align the steering ball angle with the steering actuator angle.
6、驾驶员操作转向球3,控制器ECU2以固定传动比策略输出转向执行器转动的目标信号。6. The driver operates the
本实施例中的线控转向乘用车的转向系统,根据转角传感器信号进行故障监测,根据故障监测结果进行备份操纵机构的接管控制,可用于对原有转向失效的汽车进行转向控制,实现硬件冗余功能。The steering system of the steer-by-wire passenger car in this embodiment performs fault monitoring according to the signal of the rotation angle sensor, and performs takeover control of the backup control mechanism according to the fault monitoring results, which can be used to control the steering of the original steering failure car and realize the hardware Redundant functions.
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到根据上述实施例的方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质(如ROM/RAM、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,或者网络设备等)执行本发明各个实施例所述的方法。Through the description of the above embodiments, those skilled in the art can clearly understand that the method according to the above embodiments can be implemented by means of software plus a necessary general-purpose hardware platform, and of course also by hardware, but in many cases the former is better implementation. Based on such an understanding, the essence of the technical solution of the present invention or the part that contributes to the prior art can be embodied in the form of software products, and the computer software products are stored in a storage medium (such as ROM/RAM, disk, CD) contains several instructions to enable a terminal device (which may be a mobile phone, a computer, a server, or a network device, etc.) to execute the methods described in various embodiments of the present invention.
在本实施例中还提供了一种线控转向乘用车的转向系统的控制装置,该装置用于实现上述实施例及优选实施方式,已经进行过说明的不再赘述。如以下所使用的,术语“模块”可以实现预定功能的软件和/或硬件的组合。尽管以下实施例所描述的装置较佳地以软件来实现,但是硬件,或者软件和硬件的组合的实现也是可能并被构想的。In this embodiment, a control device for a steering system of a steer-by-wire passenger car is also provided, which is used to implement the above embodiments and preferred implementation modes, and those that have already been described will not be repeated. As used below, the term "module" may be a combination of software and/or hardware that realizes a predetermined function. Although the devices described in the following embodiments are preferably implemented in software, implementations in hardware, or a combination of software and hardware are also possible and contemplated.
图7是根据本发明其中一实施例的一种线控转向乘用车的转向系统的控制装置的结构框图,如图7所示,该装置包括:检测模块70,检测模块70用于检测转向盘转角信号和转向执行器转角信号;判断模块72,判断模块72用于基于转向盘转角信号和转向执行器转角信号,判断方向盘系统是否故障;控制模块74,控制模块74用于在确定方向盘系统发生故障的情况下,生成控制指令集,控制指令集用于控制方向盘系统退出工作模式,并控制备份操纵机构进入工作模式;其中,备份操纵机构进入工作模式时,备份操纵机构控制转向执行机构进行转向动作。Fig. 7 is a structural block diagram of a control device for a steering system of a steer-by-wire passenger car according to an embodiment of the present invention. As shown in Fig. 7, the device includes: a
通过上述装置,检测转向盘转角信号和转向执行器转角信号,基于转向盘转角信号和转向执行器转角信号,判断方向盘系统是否故障,在确定方向盘系统发生故障的情况下,生成控制指令集,控制指令集用于控制方向盘系统退出工作模式,并控制备份操纵机构进入工作模式,备份操纵机构进入工作模式时,备份操纵机构控制转向执行机构进行转向动作。使得当方向盘系统发生故障时,及时由备份操纵机构控制接管转向操纵,避免车辆由于方向盘系统故障引起的安全问题,有效保障驾乘人员安全。Through the above-mentioned device, the steering wheel angle signal and the steering actuator angle signal are detected, based on the steering wheel angle signal and the steering actuator angle signal, it is judged whether the steering wheel system is faulty, and when the steering wheel system is determined to be faulty, a control instruction set is generated to control The instruction set is used to control the steering wheel system to exit the working mode, and to control the backup control mechanism to enter the working mode. When the backup control mechanism enters the working mode, the backup control mechanism controls the steering actuator to perform the steering action. Therefore, when the steering wheel system fails, the backup control mechanism takes over the steering control in time, avoiding the safety problems of the vehicle caused by the steering wheel system failure, and effectively ensuring the safety of drivers and passengers.
需要说明的是,上述各个模块是可以通过软件或硬件来实现的,对于后者,可以通过以下方式实现,但不限于此:上述模块均位于同一处理器中;或者,上述各个模块以任意组合的形式分别位于不同的处理器中。It should be noted that the above-mentioned modules can be realized by software or hardware. For the latter, it can be realized by the following methods, but not limited to this: the above-mentioned modules are all located in the same processor; or, the above-mentioned modules can be combined in any combination The forms of are located in different processors.
本发明的实施例还提供了一种存储介质,该存储介质中存储有计算机程序,其中,该计算机程序被设置为运行时执行上述任一项方法实施例中的步骤。An embodiment of the present invention also provides a storage medium, in which a computer program is stored, wherein the computer program is set to execute the steps in any one of the above method embodiments when running.
可选地,在本实施例中,上述存储介质可以被设置为存储用于执行以下步骤的计算机程序:Optionally, in this embodiment, the above-mentioned storage medium may be configured to store a computer program for performing the following steps:
步骤S1,检测转向盘转角信号和转向执行器转角信号;Step S1, detecting the steering wheel angle signal and the steering actuator angle signal;
步骤S2,基于转向盘转角信号和转向执行器转角信号,判断方向盘系统是否故障;Step S2, based on the steering wheel angle signal and the steering actuator angle signal, it is judged whether the steering wheel system is faulty;
步骤S3,在确定方向盘系统发生故障的情况下,生成控制指令集,控制指令集用于控制方向盘系统退出工作模式,并控制备份操纵机构进入工作模式;其中,备份操纵机构进入工作模式时,备份操纵机构控制转向执行机构进行转向动作。Step S3, when it is determined that the steering wheel system fails, generate a control instruction set, the control instruction set is used to control the steering wheel system to exit the working mode, and control the backup operating mechanism to enter the working mode; wherein, when the backup operating mechanism enters the working mode, the backup The steering mechanism controls the steering actuator to perform the steering action.
可选地,在本实施例中,上述存储介质可以包括但不限于:U盘、只读存储器(Read-Only Memory,简称为ROM)、随机存取存储器(Random Access Memory,简称为RAM)、移动硬盘、磁碟或者光盘等各种可以存储计算机程序的介质。Optionally, in this embodiment, the above-mentioned storage medium may include but not limited to: U disk, read-only memory (Read-Only Memory, ROM for short), random access memory (Random Access Memory, RAM for short), Various media that can store computer programs, such as removable hard disks, magnetic disks, or optical disks.
本发明的实施例还提供了一种处理器,该处理器被设置为运行计算机程序以执行上述任一项方法实施例中的步骤。Embodiments of the present invention also provide a processor, which is configured to run a computer program to execute the steps in any one of the above method embodiments.
可选地,在本实施例中,上述处理器可以被设置为通过计算机程序执行以下步骤:Optionally, in this embodiment, the above-mentioned processor may be configured to execute the following steps through a computer program:
步骤S1,检测转向盘转角信号和转向执行器转角信号;Step S1, detecting the steering wheel angle signal and the steering actuator angle signal;
步骤S2,基于转向盘转角信号和转向执行器转角信号,判断方向盘系统是否故障;Step S2, based on the steering wheel angle signal and the steering actuator angle signal, it is judged whether the steering wheel system is faulty;
步骤S3,在确定方向盘系统发生故障的情况下,生成控制指令集,控制指令集用于控制方向盘系统退出工作模式,并控制备份操纵机构进入工作模式;其中,备份操纵机构进入工作模式时,备份操纵机构控制转向执行机构进行转向动作。Step S3, when it is determined that the steering wheel system fails, generate a control instruction set, the control instruction set is used to control the steering wheel system to exit the working mode, and control the backup operating mechanism to enter the working mode; wherein, when the backup operating mechanism enters the working mode, the backup The steering mechanism controls the steering actuator to perform the steering action.
在本申请所提供的几个实施例中,应该理解到,所揭露的技术内容,可通过其它的方式实现。其中,以上所描述的装置实施例仅仅是示意性的,例如所述单元的划分,可以为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,单元或模块的间接耦合或通信连接,可以是电性或其它的形式。In the several embodiments provided in this application, it should be understood that the disclosed technical content can be realized in other ways. Wherein, the device embodiments described above are only illustrative. For example, the division of the units may be a logical function division. In actual implementation, there may be other division methods. For example, multiple units or components may be combined or may be Integrate into another system, or some features may be ignored, or not implemented. In another point, the mutual coupling or direct coupling or communication connection shown or discussed may be through some interfaces, and the indirect coupling or communication connection of units or modules may be in electrical or other forms.
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。The units described as separate components may or may not be physically separated, and the components displayed as units may or may not be physical units, that is, they may be located in one place, or may be distributed to multiple units. Part or all of the units can be selected according to actual needs to achieve the purpose of the solution of this embodiment.
另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。In addition, each functional unit in each embodiment of the present invention may be integrated into one processing unit, each unit may exist separately physically, or two or more units may be integrated into one unit. The above-mentioned integrated units can be implemented in the form of hardware or in the form of software functional units.
所述集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可为个人计算机、服务器或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、只读存储器(ROM,Read-Only Memory)、随机存取存储器(RAM,Random Access Memory)、移动硬盘、磁碟或者光盘等各种可以存储程序代码的介质。If the integrated unit is realized in the form of a software function unit and sold or used as an independent product, it can be stored in a computer-readable storage medium. Based on such an understanding, the essence of the technical solution of the present invention or the part that contributes to the prior art or all or part of the technical solution can be embodied in the form of a software product, and the computer software product is stored in a storage medium , including several instructions to make a computer device (which may be a personal computer, a server, or a network device, etc.) execute all or part of the steps of the methods described in various embodiments of the present invention. The aforementioned storage media include: U disk, read-only memory (ROM, Read-Only Memory), random access memory (RAM, Random Access Memory), mobile hard disk, magnetic disk or optical disk and other media that can store program codes. .
为了便于描述,在这里可以使用空间相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。For the convenience of description, spatially relative terms may be used here, such as "on ...", "over ...", "on the surface of ...", "above", etc., to describe The spatial positional relationship between one device or feature shown and other devices or features. It will be understood that the spatially relative terms are intended to encompass different orientations of the device in use or operation in addition to the orientation depicted in the figures. For example, if the device in the figures is turned over, devices described as "above" or "above" other devices or configurations would then be oriented "beneath" or "above" the other devices or configurations. under other devices or configurations”. Thus, the exemplary term "above" can encompass both an orientation of "above" and "beneath". The device may be otherwise oriented (rotated 90 degrees or at other orientations) and the spatially relative descriptions used herein interpreted accordingly.
除上述以外,还需要说明的是在本说明书中所谈到的“一个实施例”、“另一个实施例”、“实施例”等,指的是结合该实施例描述的具体特征、结构或者特点包括在本申请概括性描述的至少一个实施例中。在说明书中多个地方出现同种表述不是一定指的是同一个实施例。进一步来说,结合任一实施例描述一个具体特征、结构或者特点时,所要主张的是结合其他实施例来实现这种特征、结构或者特点也落在本发明的范围内。In addition to the above, it also needs to be explained that "one embodiment", "another embodiment" and "embodiment" mentioned in this specification refer to specific features, structures or Features are included in at least one embodiment generally described in this application. The appearance of the same expression in multiple places in the specification does not necessarily refer to the same embodiment. Furthermore, when a specific feature, structure or characteristic is described in combination with any embodiment, it is claimed that implementing such feature, structure or characteristic in combination with other embodiments also falls within the scope of the present invention.
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。In the foregoing embodiments, the descriptions of each embodiment have their own emphases, and for parts not described in detail in a certain embodiment, reference may be made to relevant descriptions of other embodiments.
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。The above descriptions are only preferred embodiments of the present invention, and are not intended to limit the present invention. For those skilled in the art, the present invention may have various modifications and changes. Any modifications, equivalent replacements, improvements, etc. made within the spirit and principles of the present invention shall be included within the protection scope of the present invention.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310344131.0ACN116395017A (en) | 2023-03-31 | 2023-03-31 | Steering system for steer-by-wire passenger car, vehicle and control method of steering system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310344131.0ACN116395017A (en) | 2023-03-31 | 2023-03-31 | Steering system for steer-by-wire passenger car, vehicle and control method of steering system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN116395017Atrue CN116395017A (en) | 2023-07-07 |
Family
ID=87009794
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310344131.0APendingCN116395017A (en) | 2023-03-31 | 2023-03-31 | Steering system for steer-by-wire passenger car, vehicle and control method of steering system |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116395017A (en) |
Citations (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050275205A1 (en)* | 2004-05-26 | 2005-12-15 | Bruce Ahnafield | Small diameter steering wheel apparatus |
| CN101318518A (en)* | 2007-06-09 | 2008-12-10 | 山东理工大学 | Coach steering system |
| DE102008003900B3 (en)* | 2008-01-10 | 2009-05-28 | Bayerische Motoren Werke Aktiengesellschaft | Attached steering wheel with instrumentation, includes steering torque and steering angle measurement sensors between its rim and existing vehicle steering wheel |
| CN102039967A (en)* | 2010-12-21 | 2011-05-04 | 龚毅 | Four-wheel rotating vehicle |
| US20130002416A1 (en)* | 2011-06-29 | 2013-01-03 | GM Global Technology Operations LLC | Steering Wheels for Vehicle Control in Manual and Autonomous Driving |
| US20150014086A1 (en)* | 2011-12-21 | 2015-01-15 | Volvo Group North America, Llc | Dual steering system for a vehicle |
| CN104816752A (en)* | 2015-04-21 | 2015-08-05 | 中联重科安徽工业车辆有限公司 | Steering wheel position adjustment device |
| CN205327154U (en)* | 2015-12-14 | 2016-06-22 | 沈阳市创奇游乐设备有限公司 | Bumper car is steering wheel and two control system of handle for amusement equipment |
| CN106347447A (en)* | 2016-10-26 | 2017-01-25 | 十堰飞鹰汽车工程塑料有限公司 | Automobile steering wheel |
| CN206856782U (en)* | 2017-06-22 | 2018-01-09 | 冯海涛 | The two-way steering of double plate and automobile |
| CN109606460A (en)* | 2019-01-11 | 2019-04-12 | 吉林大学 | A steering wheel takeover decision-making method for dual-rudder driving vehicles based on steering-by-wire |
| JP2019119238A (en)* | 2017-12-28 | 2019-07-22 | ダイハツ工業株式会社 | Operation auxiliary device of steering wheel |
| KR102035341B1 (en)* | 2018-09-03 | 2019-10-22 | 최문규 | Handle switching system of autonomous vehicle |
| CN212950794U (en)* | 2020-07-15 | 2021-04-13 | 盐城同济汽车配件有限公司 | Quick fixed steering wheel |
| US20210237752A1 (en)* | 2018-07-19 | 2021-08-05 | Robert Bosch Gmbh | Method for operating an autonomous vehicle, and autonomous vehicle |
| CN114368391A (en)* | 2022-01-17 | 2022-04-19 | 清华大学 | Vehicle control method and device for dual steering wheel redundant control system |
| CN114620113A (en)* | 2020-12-14 | 2022-06-14 | 通用汽车环球科技运作有限责任公司 | Multifunctional self-adaptive steering wheel control device |
| CN216833883U (en)* | 2022-03-07 | 2022-06-28 | 祝涛 | Double-control redundant steer-by-wire system |
| US20230045433A1 (en)* | 2021-08-09 | 2023-02-09 | Hyundai Mobis Co., Ltd. | Steering control method of redundant steering system |
- 2023
- 2023-03-31CNCN202310344131.0Apatent/CN116395017A/enactivePending
Patent Citations (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050275205A1 (en)* | 2004-05-26 | 2005-12-15 | Bruce Ahnafield | Small diameter steering wheel apparatus |
| CN101318518A (en)* | 2007-06-09 | 2008-12-10 | 山东理工大学 | Coach steering system |
| DE102008003900B3 (en)* | 2008-01-10 | 2009-05-28 | Bayerische Motoren Werke Aktiengesellschaft | Attached steering wheel with instrumentation, includes steering torque and steering angle measurement sensors between its rim and existing vehicle steering wheel |
| CN102039967A (en)* | 2010-12-21 | 2011-05-04 | 龚毅 | Four-wheel rotating vehicle |
| US20130002416A1 (en)* | 2011-06-29 | 2013-01-03 | GM Global Technology Operations LLC | Steering Wheels for Vehicle Control in Manual and Autonomous Driving |
| US20150014086A1 (en)* | 2011-12-21 | 2015-01-15 | Volvo Group North America, Llc | Dual steering system for a vehicle |
| CN104816752A (en)* | 2015-04-21 | 2015-08-05 | 中联重科安徽工业车辆有限公司 | Steering wheel position adjustment device |
| CN205327154U (en)* | 2015-12-14 | 2016-06-22 | 沈阳市创奇游乐设备有限公司 | Bumper car is steering wheel and two control system of handle for amusement equipment |
| CN106347447A (en)* | 2016-10-26 | 2017-01-25 | 十堰飞鹰汽车工程塑料有限公司 | Automobile steering wheel |
| CN206856782U (en)* | 2017-06-22 | 2018-01-09 | 冯海涛 | The two-way steering of double plate and automobile |
| JP2019119238A (en)* | 2017-12-28 | 2019-07-22 | ダイハツ工業株式会社 | Operation auxiliary device of steering wheel |
| US20210237752A1 (en)* | 2018-07-19 | 2021-08-05 | Robert Bosch Gmbh | Method for operating an autonomous vehicle, and autonomous vehicle |
| KR102035341B1 (en)* | 2018-09-03 | 2019-10-22 | 최문규 | Handle switching system of autonomous vehicle |
| CN109606460A (en)* | 2019-01-11 | 2019-04-12 | 吉林大学 | A steering wheel takeover decision-making method for dual-rudder driving vehicles based on steering-by-wire |
| CN212950794U (en)* | 2020-07-15 | 2021-04-13 | 盐城同济汽车配件有限公司 | Quick fixed steering wheel |
| CN114620113A (en)* | 2020-12-14 | 2022-06-14 | 通用汽车环球科技运作有限责任公司 | Multifunctional self-adaptive steering wheel control device |
| US20230045433A1 (en)* | 2021-08-09 | 2023-02-09 | Hyundai Mobis Co., Ltd. | Steering control method of redundant steering system |
| CN114368391A (en)* | 2022-01-17 | 2022-04-19 | 清华大学 | Vehicle control method and device for dual steering wheel redundant control system |
| CN216833883U (en)* | 2022-03-07 | 2022-06-28 | 祝涛 | Double-control redundant steer-by-wire system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10442441B2 (en) | Retractable handwheel gesture control | |
| CN107472252B (en) | Driver competency during autonomous handover | |
| CN104583723B (en) | Operation device | |
| CN106904213A (en) | The movable direction disk of autonomous vehicle | |
| KR20200103901A (en) | Gesture interface system for autonomous vehicle and operating method thereof | |
| CN104670323A (en) | Method for selecting the automatic parking mode using a steering wheel | |
| US20150202962A1 (en) | System and method for providing an augmented reality vehicle interface | |
| US20130144463A1 (en) | Configurable vehicle console | |
| CN106275055A (en) | Transfer | |
| EP3969327B1 (en) | Rear-view camera for pick-up trucks with open tailgates | |
| CN106608188B (en) | Automobile electronic function control method based on virtual switch | |
| CN111344547B (en) | Method for testing at least one vehicle component of a vehicle | |
| JP2015125778A (en) | Plane field activation system and method for gesture-based control systems | |
| CN106292552A (en) | A kind of method of remote-control car and device, terminal and automobile | |
| JP7524862B2 (en) | Vehicle setting device and vehicle setting method | |
| CN119137447A (en) | System and method for presenting information to an operator of a recreational vehicle | |
| US20140180541A1 (en) | Steering device having tilting and telescopic function | |
| CN113173205A (en) | Vehicle steer-by-wire system control method and device based on telescopic steering wheel | |
| CN116654084A (en) | Steering-by-wire system, control method and device thereof, storage medium and vehicle | |
| CN111469908A (en) | Touch control steering wheel, control method and automobile | |
| CN110399078A (en) | Rotation control method, device and system of display terminal | |
| CN112373302A (en) | Display control method, display control device, vehicle, and storage medium | |
| CN116395017A (en) | Steering system for steer-by-wire passenger car, vehicle and control method of steering system | |
| CN115583284A (en) | Steering wheel control device and method for SBW system | |
| JP2013043510A (en) | Parking assist apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |