CN116323356A - Vehicle guidance system and method for operating a driving function in different modes - Google Patents
Vehicle guidance system and method for operating a driving function in different modesDownload PDFInfo
- Publication number
- CN116323356A CN116323356ACN202180069309.4ACN202180069309ACN116323356ACN 116323356 ACN116323356 ACN 116323356ACN 202180069309 ACN202180069309 ACN 202180069309ACN 116323356 ACN116323356 ACN 116323356A
- Authority
- CN
- China
- Prior art keywords
- vehicle
- signal unit
- signal
- driving function
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/181—Preparing for stopping
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18154—Approaching an intersection
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18159—Traversing an intersection
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/182—Selecting between different operative modes, e.g. comfort and performance modes
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0057—Estimation of the time available or required for the handover
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0059—Estimation of the risk associated with autonomous or manual driving, e.g. situation too complex, sensor failure or driver incapacity
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/007—Switching between manual and automatic parameter input, and vice versa
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0075—Automatic parameter input, automatic initialising or calibrating means
- B60W2050/0083—Setting, resetting, calibration
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/21—Voice
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/215—Selection or confirmation of options
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/20—Data confidence level
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/40—High definition maps
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及一种用于结合信号单元来运行车辆的驾驶功能、特别是驾驶员辅助功能的车辆引导系统和相应的方法。The invention relates to a vehicle guidance system and a corresponding method for operating driving functions of a vehicle, in particular driver assistance functions, in conjunction with a signal unit.
背景技术Background technique
车辆可以具有辅助车辆驾驶员引导车辆、特别是纵向引导车辆的一个或多个驾驶功能。用于辅助车辆纵向引导的示例性驾驶功能为自适应巡航控制(ACC)功能,其例如可以在乡村道路或高速公路上用于以所定义的设定行驶速度或目标行驶速度和/或以所定义的与在车辆前方行驶的前车的目标距离来纵向引导车辆。The vehicle may have one or more driving functions that assist the vehicle driver in guiding the vehicle, in particular longitudinally guiding the vehicle. An exemplary driving function for assisting the longitudinal guidance of the vehicle is the Adaptive Cruise Control (ACC) function, which can be used, for example, on country roads or motorways at a defined set or target driving speed and/or at a defined driving speed. The vehicle is guided longitudinally at a defined target distance from a preceding vehicle driving in front of the vehicle.
在城市地区,当车辆在道路上行驶时,经常会遇到其所行驶的道路与一个或多个其他交通路线(例如另一道路、人行道等)的路口。在路口处可能设置有信号灯装置和/或交通标志(例如停车标志),通过其控制路口处的先行权。在本文中,用于定义在路口处的先行权和/或驶入路口的许可或驶过路口的许可的信号灯装置和/或交通标志被统称为信号单元。In urban areas, when a vehicle travels on a road, it often encounters an intersection between the road it is traveling on and one or more other traffic routes (eg, another road, sidewalk, etc.). Signal lights and/or traffic signs (eg stop signs) may be provided at intersections, by means of which the right of way at the intersection is controlled. In this context, signal light devices and/or traffic signs for defining the right of way at a junction and/or permission to enter or pass through a junction are collectively referred to as signal units.
发明内容Contents of the invention
本文涉及以下技术目的:提供用于车辆的自动纵向引导的驾驶功能、特别是驾驶员辅助功能,其被设置为以可靠且鲁棒的方式考虑信号单元,特别是以便提高驾驶功能的可用性和/或安全性和/或舒适性。This document relates to the technical purpose of providing driving functions for automatic longitudinal guidance of a vehicle, in particular driver assistance functions, which are arranged to take into account signal units in a reliable and robust manner, in particular in order to increase the usability of driving functions and/or or safety and/or comfort.
该目的通过每个独立权利要求来实现。尤其在从属权利要求中说明了有利的实施方式。应指出的是,从属于独立权利要求的从属权利要求的附加特征在没有独立权利要求的特征或者仅在与独立权利要求的特征子集相组合的情况下可以构成独立于独立权利要求的所有特征组合的单独发明,其可以成为独立权利要求、分案申请或后续申请的主题。这同样适用于说明书中描述的可以形成独立于独立权利要求的特征的发明的技术教导。This object is achieved by each independent claim. Advantageous embodiments are described in particular in the dependent claims. It should be noted that additional features of dependent claims that are dependent on the independent claim may constitute all features independent of the independent claim without the features of the independent claim or only in combination with a subset of features of the independent claim A combined separate invention which may be the subject of independent claims, a divisional application or a subsequent application. The same applies to the technical teaching described in the description which may form the features of the invention independently of the independent claims.
根据一个方面,描述了一种用于提供用于车辆的自动纵向引导的驾驶功能的车辆引导系统。驾驶功能特别是可以被设计为在信号单元处和/或结合信号单元自动地纵向引导车辆。在此,可以根据SAE 2级设计驾驶功能。换言之,驾驶功能必要时可以提供根据SAE2级的自动驾驶和/或驾驶员辅助(就纵向引导而言)。驾驶功能可以限于车辆的纵向引导。车辆的横向引导在运行期间可以由驾驶员手动提供,或者由其他和/或单独的驾驶功能(例如车道保持辅助)提供。According to one aspect, a vehicle guidance system for providing a driving function for automatic longitudinal guidance of a vehicle is described. In particular, the driving function can be designed to automatically guide the vehicle longitudinally on and/or in conjunction with the signaling unit. Here, the driving function can be designed according to SAE Level 2. In other words, the driving function can optionally provide automated driving and/or driver assistance (in terms of longitudinal guidance) according to SAE level 2. Driving functions may be limited to longitudinal guidance of the vehicle. Lateral guidance of the vehicle can be provided manually by the driver during operation, or by other and/or separate driving functions such as lane keeping assist.
车辆引导系统可以被配置为根据设定速度或目标速度和/或根据与(紧邻)在车辆前方行驶的前车的目标距离来自动地纵向引导车辆。为此目的,车辆引导系统可以提供速度调节器,通过其根据设定速度或目标速度来设置、特别是调节车辆的实际行驶速度。替代地或附加地,可以提供距离调节器,通过其根据目标距离来设置、特别是调节车辆与前车的实际距离。如果不存在相关的前车或者前车行驶得比设定速度或目标速度更快,则可以调节车辆的行驶速度。替代地或附加地,如果前车行驶得比设定速度或目标速度慢,则可以调节车辆与前车的距离。因此,车辆引导系统可以被配置为提供自适应巡航控制(ACC)驾驶员辅助功能。The vehicle guidance system may be configured to automatically guide the vehicle longitudinally as a function of a set or target speed and/or as a function of a target distance from a preceding vehicle driving (immediately) in front of the vehicle. For this purpose, the vehicle guidance system can provide a speed regulator by means of which the actual driving speed of the vehicle is set, in particular regulated, as a function of a set speed or a target speed. Alternatively or additionally, a distance controller can be provided, by means of which the actual distance of the vehicle to the preceding vehicle is set, in particular adjusted, as a function of the target distance. The vehicle's travel speed may be adjusted if there is no relevant preceding vehicle or if the preceding vehicle is traveling faster than a set or target speed. Alternatively or additionally, the distance of the vehicle from the preceding vehicle may be adjusted if the preceding vehicle is traveling slower than a set or target speed. Accordingly, vehicle guidance systems may be configured to provide adaptive cruise control (ACC) driver assistance functionality.
车辆或车辆引导系统可以包括用于与车辆的用户、特别是驾驶员交互的用户界面。用户界面可以包括一个或多个操作元件,使得用户可以定义设定速度或目标速度和/或目标距离。替代地或附加地,该一个或多个操作元件可以使得用户可确认车辆的预定的设定速度和/或目标速度和/或预定的目标距离,以运行驾驶功能。该一个或多个操作元件可以被设计为通过驾驶员的手和/或手指来操纵。替代地或附加地,该一个或多个操作元件可以布置在车辆的转向装置处(特别是在方向盘处或转向支架处)。A vehicle or a vehicle guidance system may comprise a user interface for interacting with a user of the vehicle, in particular the driver. The user interface may comprise one or more operating elements enabling the user to define a set or target speed and/or target distance. Alternatively or additionally, the one or more operating elements may enable the user to confirm a predetermined set speed and/or a target speed and/or a predetermined target distance of the vehicle in order to perform a driving function. The one or more operating elements can be designed to be actuated by the driver's hand and/or fingers. Alternatively or additionally, the one or more operating elements can be arranged on the steering of the vehicle (in particular on the steering wheel or on the steering bracket).
示例性操作元件(特别是加/减操作元件)是如下按钮和/或摇杆,通过其可以增大或减小设定速度和/或目标速度或目标距离。另一示例性操作元件(特别是设置操作元件)是如下按钮,通过其可以将车辆的当前行驶速度定义为设定速度和/或目标速度或者将车辆与前车的当前距离定义为目标距离。另一示例性操作元件(特别是恢复操作元件)是如下按钮,通过其可以重新确认或再次激活先前设置的设定速度和/或目标速度或先前设置的目标距离。Exemplary operating elements, in particular plus/minus operating elements, are buttons and/or joysticks by means of which a set speed and/or a target speed or a target distance can be increased or decreased. Another exemplary control element (in particular a setting control element) is a button with which the current driving speed of the vehicle can be defined as the set speed and/or target speed or the current distance of the vehicle from the preceding vehicle as the target distance. Another exemplary operating element, in particular a reset operating element, is a button via which a previously set setpoint speed and/or a target speed or a previously set target distance can be reconfirmed or activated again.
此外,用户界面还可以包括一个或多个输出元件(例如屏幕和/或扬声器和/或振动元件),借以可以实现向车辆用户的输出。Furthermore, the user interface can also include one or more output elements (for example a screen and/or a loudspeaker and/or a vibrating element), whereby an output to the vehicle user can be realized.
此外,车辆引导系统可以被配置为在自动纵向引导中考虑车辆所行驶的车道(特别是道路)和/或行驶路线上的一个或多个信号单元。信号单元可以被设置用于定义车辆所行驶的车道网络的路口(特别是十字路口)处的先行权。在此,先行权的定义可随时间改变(例如在信号灯装置的情况中,例如在红绿灯装置中,在路口处对于车辆的一个或多个不同行驶方向具有一个或多个不同的信号组)或被固定地预设(例如在交通标志的情况中,例如在停车标志中)。Furthermore, the vehicle guidance system can be configured to take into account one or more signal units on the lane (in particular road) and/or the driving route on which the vehicle is traveling in the automatic longitudinal guidance. The signaling unit may be provided for defining the right-of-way at intersections, in particular intersections, of the lane network on which the vehicle is traveling. Here, the definition of the right of way can change over time (e.g. in the case of a signal light system, for example in a traffic light system, there are one or more different sets of signals at the intersection for one or more different directions of travel of the vehicle) or is fixedly preset (eg in the case of traffic signs, eg in stop signs).
车辆引导系统可以被配置为确定关于位于车辆行驶方向前方的信号单元的数据。该数据可以包括在车辆所行使的车道网络中关于信号单元的地图数据。地图数据可以分别包括信号单元的一个或多个属性。信号单元的一个或多个属性可以表示或包括:The vehicle guidance system may be configured to determine data about signal units located ahead in the direction of travel of the vehicle. The data may include map data about signal cells in the lane network traveled by the vehicle. The map data may each include one or more attributes of a signal unit. One or more properties of a signal unit may represent or include:
·信号单元的类型,特别是信号单元是信号灯装置还是交通标志;和/或· the type of signaling unit, in particular whether the signaling unit is a signaling device or a traffic sign; and/or
·在设置有信号单元或与信号单元相关联的车道网络的路口处,信号单元对于不同行驶方向的不同信号组的数量;和/或the number of different signal groups of a signal unit for different directions of travel at intersections provided with a signal unit or with a lane network associated with a signal unit; and/or
·信号单元和/或信号单元的停止线在车道网络内的位置(例如GPS坐标);和/或The location (e.g. GPS coordinates) of the signal unit and/or the stop line of the signal unit within the lane network; and/or
·停止线与对应的信号单元的相对距离。• The relative distance between the stop line and the corresponding signal unit.
车辆引导系统可以被配置为通过使用车辆的位置传感器(例如GPS接收器)来确定车辆在车道网络内的实际位置(例如当前GPS坐标)。然后,借助于地图数据可以识别车辆行驶路线上的(例如下一个)信号单元。此外,还可以确定关于所识别的信号单元的一个或多个属性。The vehicle guidance system may be configured to determine the vehicle's actual location (eg current GPS coordinates) within the lane network by using the vehicle's position sensors (eg GPS receiver). The (for example next) signal unit on the vehicle's driving route can then be identified with the aid of the map data. In addition, one or more properties about the identified signal unit may also be determined.
替代地或附加地,关于位于车辆行驶方向前方的信号单元的数据可以包括关于信号单元的环境数据,或者可以基于环境数据来确定。环境数据可以由车辆的一个或多个环境传感器检测。示例性的环境传感器是摄像机、雷达传感器、激光雷达传感器等。一个或多个环境数据可以被配置为检测关于在车辆前方的行驶方向上的环境的传感器数据(即环境数据)。Alternatively or additionally, the data regarding the signaling unit located ahead in the direction of travel of the vehicle may comprise ambient data regarding the signaling unit or may be determined on the basis of the ambient data. Environmental data may be detected by one or more environmental sensors of the vehicle. Exemplary environmental sensors are cameras, radar sensors, lidar sensors, and the like. The one or more pieces of ambient data may be configured as sensor data (ie, ambient data) detected about the environment in the direction of travel ahead of the vehicle.
车辆引导系统可以被配置为基于环境数据(特别是基于摄像机的传感器数据)识别出在车辆前方的行驶方向上布置有信号单元。为此目的,例如可以使用图像分析算法。此外,车辆引导系统可以被配置为基于环境数据来确定信号单元的类型(例如信号灯装置或交通标志)。此外,车辆引导系统还可以被配置为基于环境数据确定信号单元关于与信号单元相关联的路口通行许可的(信号)状态。特别是可以确定信号灯装置的一个或多个信号组的颜色(绿色、黄色或红色)。The vehicle guidance system can be configured to detect on the basis of environmental data, in particular camera-based sensor data, that a signaling unit is arranged in front of the vehicle in the direction of travel. For this purpose, image analysis algorithms can be used, for example. Furthermore, the vehicle guidance system may be configured to determine the type of signaling unit (eg a signal light device or a traffic sign) based on the environmental data. Furthermore, the vehicle guidance system may also be configured to determine the (signal) status of the signaling unit with respect to the intersection clearance associated with the signaling unit on the basis of the environmental data. In particular, the color (green, yellow or red) of one or more signal groups of the signal light arrangement can be determined.
车辆引导系统可以被配置为在车辆的自动纵向引导中考虑所识别的信号单元。车辆引导系统特别是可以被配置为基于关于所识别的信号单元的数据,特别是基于由数据表示的信号单元的灯光信号或信号组的颜色来确定车辆是否必须停止在信号单元处,特别是信号单元的停止线处。例如,可能识别出车辆必须停止,因为与车辆相关的信号组是红色的。或者可能识别出车辆不必停止,因为与车辆相关的信号组是绿色的。在另一示例中,可能识别出车辆必须停止,因为信号单元是停车标志。The vehicle guidance system can be configured to take the identified signal unit into account in the automatic longitudinal guidance of the vehicle. The vehicle guidance system can in particular be configured to determine whether the vehicle has to stop at a signal unit, in particular a signal at the stop line of the unit. For example, it may be recognized that the vehicle must be stopped because the signal group associated with the vehicle is red. Or it may be recognized that the vehicle does not have to stop because the signal group associated with the vehicle is green. In another example, it may be recognized that the vehicle must be stopped because the signaling unit is a stop sign.
此外,车辆引导系统还可以被配置为当确定车辆必须在信号单元处停止时,使车辆在所识别的信号单元处自动地停止。为此目的,可以实现自动减速过程(直到静止)。在此,可以自动引导车辆直到到达信号单元的停止线处或停止线前。在自动减速过程中,可以通过车辆引导系统自动控制一个或多个车轮制动器(例如一个或多个摩擦制动器或者一个或多个回收制动器),以便使车辆制动(直到静止)。在此,所实现的减速的时间过程可以取决于到所识别的信号单元的可用制动距离。Furthermore, the vehicle guidance system may also be configured to automatically stop the vehicle at the identified signal unit when it is determined that the vehicle must stop at the signal unit. For this purpose, an automatic deceleration process (until standstill) can be implemented. In this case, the vehicle can be automatically guided until reaching a stop line of the signaling unit or before the stop line. During automatic deceleration, one or more wheel brakes (eg, one or more friction brakes or one or more recovery brakes) may be automatically controlled by the vehicle guidance system to brake the vehicle (to a standstill). In this case, the time course of the deceleration achieved can depend on the available braking distance to the identified signaling unit.
替代地或附加地,车辆引导系统可以被配置为当确定车辆不必在信号单元处停止时,使得自动地纵向引导车辆行驶通过所识别的信号单元,特别是通过信号单元的停止线。在此,可以根据设定速度或目标速度和/或与前车的目标距离继续进行速度和/或距离调节。Alternatively or additionally, the vehicle guidance system can be configured such that the vehicle is automatically guided longitudinally past the identified signal unit, in particular through the stop line of the signal unit, when it is determined that the vehicle does not have to stop at the signal unit. Here, the speed and/or distance regulation can continue depending on the set speed or the target speed and/or the target distance to the vehicle in front.
因此,车辆引导系统可以被配置为通过考虑信号单元来提供ACC驾驶功能。驾驶功能在本文中也被称为城市巡航控制(UCC)驾驶功能。Accordingly, the vehicle guidance system may be configured to provide an ACC driving function by taking into account the signal unit. The driving function is also referred to herein as an urban cruise control (UCC) driving function.
如上所述,车辆引导系统可以被配置为在驾驶功能的范畴中根据目标速度和/或根据与在车辆前方行驶的前车的目标距离自动地纵向引导车辆。此外,车辆引导系统还可以被配置为,如果在驾驶功能中不考虑(可能识别出的)信号单元,则特别是与信号单元的灯光信号颜色无关地根据目标速度和/或目标距离自动地纵向引导车辆行驶通过信号单元,特别是通过信号单元的停止线。因此,驾驶功能(在不考虑信号单元的情况下)必要时可以运行为就像信号单元(和与之相关的路口)不存在一样。As mentioned above, the vehicle guidance system can be configured to automatically guide the vehicle longitudinally in the context of a driving function as a function of a target speed and/or as a function of a target distance from a preceding vehicle driving in front of the vehicle. In addition, the vehicle guidance system can also be configured so that, if a (possibly recognized) signal unit is not taken into account in the driving function, it automatically longitudinally Guidance of vehicles traveling through signalized units, in particular through the stop line of the signalized unit. Thus, the driving function (regardless of the signal unit) can optionally be operated as if the signal unit (and the intersection associated therewith) were not present.
车辆引导系统必要时可以使得车辆用户可通过用户界面(例如在配置菜单中)配置驾驶功能。在此必要时可以设置应当以自动模式还是手动模式运行驾驶功能。The vehicle guidance system may optionally allow the vehicle user to configure the driving functions via a user interface (for example in a configuration menu). If necessary, it can be set whether the driving functions are to be run in automatic mode or in manual mode.
在自动模式下,驾驶功能可以如下运行,即在驾驶功能运行时自动考虑由车辆引导系统识别的位于行驶方向前方的信号单元(并且必要时促使车辆自动减速)。特别地,车辆引导系统在自动模式下可以被配置为在车辆的自动纵向引导中特别是无需车辆用户的确认而自动考虑基于地图数据和/或环境数据所检测的信号单元(例如以便在需要时使得车辆在所检测的信号单元处自动减速)。In automatic mode, the driving function can be operated in such a way that a signal unit detected by the vehicle guidance system ahead in the direction of travel is automatically taken into account when the driving function is active (and, if necessary, an automatic deceleration of the vehicle is caused). In particular, the vehicle guidance system can be configured in automatic mode to automatically take into account signal units detected on the basis of map data and/or environmental data in the automatic longitudinal guidance of the vehicle, in particular without confirmation from the vehicle user (for example in order to make the vehicle automatically decelerate at the detected signal unit).
另一方面,在手动模式下,驾驶功能可以如下运行,即在车辆的自动纵向引导中仅在车辆用户确认之后才考虑所识别的信号单元(并且必要时促使车辆自动减速)。特别地,车辆引导系统在手动模式下可以被配置为(通过车辆的用户界面)向车辆用户发出关于考虑所识别的信号单元的建议。例如,在屏幕上可以显示出已识别到信号单元并且需要用户反馈(以使得在车辆的自动纵向引导中考虑信号单元)。当(特别是仅当)用户接受建议时(例如通过操作元件、特别是设置操作元件的确认),则可以在信号单元处的车辆自动纵向引导中考虑所识别的信号单元(特别是信号单元的信号状态)。然后必要时在所识别的信号单元处进行车辆的自动减速。另一方面,车辆引导系统可以被配置为,如果用户不接受该建议,则在信号单元处的车辆自动纵向引导中不考虑和/或忽略所识别的信号单元(特别是信号单元的信号状态)。在这种情况下,可以继续进行速度和/或距离调节(不考虑信号单元,特别是就像信号单元不存在一样)。In manual mode, on the other hand, the driving function can operate in such a way that the detected signal unit is taken into account in the automatic longitudinal guidance of the vehicle (and the vehicle is automatically decelerated if necessary) only after confirmation by the vehicle user. In particular, the vehicle guidance system in manual mode may be configured to issue (via the vehicle's user interface) a suggestion to the vehicle user to consider the identified signaling unit. For example, it can be displayed on a screen that a signal unit has been detected and that user feedback is required (so that the signal unit is taken into account in the automatic longitudinal guidance of the vehicle). The identified signaling unit (in particular the signal unit's signal state). An automatic deceleration of the vehicle then takes place, if necessary, at the identified signal unit. On the other hand, the vehicle guidance system can be configured such that, if the user does not accept the proposal, the identified signaling unit (in particular the signaling status of the signaling unit) is not taken into account and/or ignored in the automatic longitudinal guidance of the vehicle at the signaling unit . In this case, the speed and/or distance adjustment can continue (regardless of the signaling unit, in particular as if the signaling unit were not present).
通过为驾驶功能(特别是UCC驾驶功能)的运行提供不同的(可调节的)模式,可以进一步提高驾驶功能的舒适性。The comfort of the driving functions can be further increased by providing different (adjustable) modes for the operation of the driving functions, in particular the UCC driving function.
车辆引导系统可以被设计为借助于用户界面向驾驶功能的用户通知驾驶功能的状态。特别是可以通知驾驶功能的用户关于如下信息:在驾驶功能的运行中、特别是在车辆的自动纵向引导中,是否考虑由车辆引导系统识别的位于行驶方向前方的信号单元。The vehicle guidance system can be designed to inform the user of the driving function about the state of the driving function by means of a user interface. In particular, the user of the driving function can be informed as to whether signal units identified by the vehicle guidance system located ahead in the direction of travel are taken into account during the operation of the driving function, in particular in the automatic longitudinal guidance of the vehicle.
特别地,车辆引导系统可以被配置用于(例如基于地图数据和/或环境数据)确定在驾驶功能的运行中是否将考虑或是否可考虑位于行驶方向前方的信号单元。如果将考虑或可考虑信号单元,则必要时可以发出可用性输出、特别是可用性显示,以便通知用户在车辆的自动纵向引导中将考虑位于前方的信号单元(从而在需要时进行车辆在信号单元处的自动减速)。In particular, the vehicle guidance system can be configured to determine (for example on the basis of map data and/or environmental data) whether a signal unit located ahead in the direction of travel is to be taken into account or can be taken into account during the operation of the driving function. If a signaling unit is to be taken into account or can be taken into account, an availability output, in particular an availability display, can possibly be issued in order to inform the user that a signaling unit located ahead will be taken into account in the automatic longitudinal guidance of the vehicle (so that, if necessary, the vehicle is at the signaling unit) automatic deceleration).
替代地或附加地,车辆引导系统可以被配置为(当确定在驾驶功能中不会考虑或无法考虑位于前方的信号单元时)(通过用户界面)产生不可用性输出、特别是不可用性显示,以便通知车辆用户在车辆的自动纵向引导中不会考虑位于前方的信号单元(从而也不会根据信号单元的信号状态使车辆自动减速)。Alternatively or additionally, the vehicle guidance system can be configured to generate (via the user interface) an unavailability output, in particular an unavailability display, when it is determined that a signal unit located ahead is not or cannot be taken into account in the driving function, in order to The vehicle user is informed that the signaling unit located ahead is not taken into account in the automatic longitudinal guidance of the vehicle (and thus also does not automatically decelerate the vehicle depending on the signal state of the signaling unit).
通过发出可用性和/或不可用性输出,可以进一步提高驾驶功能的舒适性和安全性。在此,可用性和/或不可用性输出可以分别包括视觉、听觉和/或触觉输出。By issuing an availability and/or unavailability output, the comfort and safety of the driving function can be further increased. Here, the availability and/or unavailability output may include visual, auditory and/or tactile output, respectively.
车辆引导系统可以被配置为确定信号单元的与车辆行驶方向相关的信号组的信号状态发生变化(例如,在车辆驶近信号组期间,或在车辆处于信号组期间)。例如,可以识别出发生了从红色到绿色的相变。The vehicle guidance system may be configured to determine a change in signal state of a signal unit's signal group related to the direction of travel of the vehicle (eg, during a vehicle approaching a signal group, or while the vehicle is in a signal group). For example, it can be recognized that a phase transition from red to green has occurred.
此外,车辆引导系统可以被配置为(响应于所识别的相变)使得将关于信号单元信号组的发生变化的信号状态的信息传递给车辆的驾驶员。例如,可以使得只要信号组呈现红色就通过用户界面的输出元件(特别是在屏幕上)显示所识别的(并且必要时在自动纵向引导中所考虑的)信号单元的符号。在识别出相变为绿色之后,则必要时可以撤回所显示的符号或可以终止输出。因此,可以通过可靠的方式告知车辆驾驶员例如在车辆在信号单元处停止后可能产生(必要时自动的)起步过程(例如通过操纵用户界面的操作元件)。在此,显示的撤回可以在驾驶功能的自动模式和/或手动模式下一致地进行。Furthermore, the vehicle guidance system may be configured (in response to a recognized phase change) such that information about the changed signal state of the signal unit signal group is communicated to the driver of the vehicle. For example, it is possible for the symbol of the signal unit identified (and possibly taken into account in the automatic longitudinal guidance) to be displayed via an output element of the user interface (in particular on a screen) whenever the signal group is colored red. After a phase change to green has been detected, the displayed symbol can be withdrawn or the output can be terminated if necessary. Thus, the driver of the vehicle can be informed in a reliable manner (for example by actuating an operating element of the user interface) that a (possibly automatic) start-off procedure may take place after the vehicle has stopped at the signaling unit, for example. In this case, the withdrawal of the display can take place consistently in the automatic mode and/or in the manual mode of the driving function.
车辆引导系统可以被配置为当驾驶功能被中断时向车辆的驾驶员发出接管请求。例如,可能识别出自动纵向引导(根据设定速度和/或目标速度和/或根据目标距离)无法或不会继续进行。例如,如果车辆的驾驶员(主要)干预车辆的纵向引导(例如通过车辆的驾驶员操纵制动踏板或加速踏板),则可能发生驾驶功能的中断。然后可以向车辆驾驶员发出接管请求(TOR)。然后,纵向引导必须再次由驾驶员实施。通过发出接管请求可以提高车辆运行的安全性。The vehicle guidance system may be configured to issue a takeover request to the driver of the vehicle when the driving function is interrupted. For example, it may be recognized that automatic longitudinal guidance (according to a set speed and/or a target speed and/or according to a target distance) cannot or will not proceed. Interruption of the driving function may occur, for example, if the driver of the vehicle intervenes (principally) in the longitudinal guidance of the vehicle, for example by the driver of the vehicle actuating a brake pedal or an accelerator pedal. A take-over request (TOR) may then be issued to the vehicle driver. The longitudinal guidance must then again be implemented by the driver. The safety of vehicle operation can be increased by issuing a takeover request.
替代地或附加地,如果期望驾驶员手动干预车辆的纵向引导,则可以发出接管请求。例如,可能识别出车辆引导系统不再能够自动执行纵向引导(例如为了到达特定的目标点,例如信号单元处)。作为其响应,随后可以向车辆驾驶员发出接管请求。Alternatively or additionally, a takeover request can be issued if the driver is desired to intervene manually in the longitudinal guidance of the vehicle. For example, it may be recognized that the vehicle guidance system is no longer able to automatically carry out longitudinal guidance (for example in order to reach a specific target point, for example at a signaling unit). In response thereto, a takeover request may then be issued to the driver of the vehicle.
如上所述,车辆引导系统可以被设置为确定关于位于车辆行驶方向前方的信号单元(以下也称为“第一”信号单元)的数据(特别是地图数据和/或环境数据)。此外,车辆引导系统可以被配置为根据关于第一信号单元的数据在第一信号单元处以自动模式或手动模式运行驾驶功能。特别地,车辆引导系统可以被设置为,即使从驾驶功能的用户设置或配置中得出应当以自动模式运行驾驶功能,(必要时)也选择性地在第一信号单元处以手动模式运行驾驶功能。As mentioned above, the vehicle guidance system can be arranged to determine data (in particular map data and/or environmental data) about a signal unit (hereinafter also referred to as “first” signal unit) located ahead in the direction of travel of the vehicle. Furthermore, the vehicle guidance system may be configured to run a driving function at the first signaling unit in an automatic mode or in a manual mode depending on the data about the first signaling unit. In particular, the vehicle guidance system can be configured to selectively (if necessary) operate the driving function in manual mode at the first signal unit, even if it follows from a user setting or configuration of the driving function that the driving function should be operated in automatic mode .
换言之,车辆引导系统可以被设置为必要时确定由车辆用户引起的关于如下信息的用户设置,即(在默认情况下)应当是以自动模式还是以手动模式运行驾驶功能。必要时,即使用户设置表示应当以自动模式运行驾驶功能,也可以根据关于第一信号单元的数据在第一信号单元处以手动模式运行驾驶功能。另一方面,车辆引导系统可以被设置为,当用户设置表示应当以手动模式运行驾驶功能时,即使基于关于第一信号单元的数据能够以自动模式运行驾驶功能,在第一信号单元处也以手动模式运行驾驶功能。In other words, the vehicle guidance system can be configured to ascertain, if necessary, a user setting caused by the vehicle user as to whether (by default) the driving function should be run in automatic or manual mode. If necessary, the driving function can be operated in manual mode at the first signal unit on the basis of the data on the first signal unit, even if a user setting indicates that the driving function should be operated in automatic mode. On the other hand, the vehicle guidance system can be configured to display at the first signal unit with Manual mode runs driving functions.
由此,车辆引导系统可以被配置为,即使用户设置表示应当以自动模式运行驾驶功能,必要时也使用驾驶功能的手动模式。通过选择性地使用手动模式,必要时可以避免考虑信号单元的不可用性。由此可以提高驾驶功能的可用性、安全性和舒适性。Thereby, the vehicle guidance system can be configured to use the manual mode of the driving function if necessary even if the user settings indicate that the driving function should be run in automatic mode. By using the manual mode selectively, consideration of unavailability of signaling units can be avoided if necessary. This increases the usability, safety and comfort of driving functions.
车辆引导系统可以被设置为在到达第一信号单元之前确定决定时间点和/或决定位置,最迟应当或必须在该决定时间点或决定位置向车辆的用户发出关于考虑第一信号单元的建议。在此,决定时间点和/或决定位置可以取决于关于第一信号单元的所需干预持续时间(特别是自动减速的所需持续时间)和/或取决于用户对建议的(典型的)反应速度。The vehicle guidance system can be configured to determine a decision point in time and/or a decision location before reaching the first signal unit, at the latest at which decision time point or decision location should or must be issued to the user of the vehicle with a recommendation to consider the first signal unit . In this case, the decision point in time and/or the decision position can depend on the required duration of the intervention with respect to the first signal unit (in particular the required duration of automatic deceleration) and/or on the (typical) reaction of the user to the proposal speed.
特别地,车辆引导系统可以被设置为在到达第一信号单元之前确定干预时间点或干预位置,最迟应当或必须在该干预时间点或干预位置处在车辆的自动纵向引导中考虑第一信号单元(例如以便仍可以使车辆自动减速至静止)。替代地或附加地,车辆引导系统可以被设置为确定授予用户的反应时间段或反应距离,以便对关于考虑第一信号单元的建议进行响应。然后,可以基于干预时间点或干预位置,和/或基于反应时间段或反应距离来确定决定时间点和/或决定位置。In particular, the vehicle guidance system can be configured to determine an intervention point in time or an intervention position at the latest before reaching the first signal unit at which the first signal should or must be taken into account in the automatic longitudinal guidance of the vehicle unit (e.g. so that the vehicle can still be automatically decelerated to a standstill). Alternatively or additionally, the vehicle guidance system can be configured to determine a reaction time period or reaction distance granted to the user in order to respond to the suggestion to consider the first signal unit. The decision time point and/or the decision location can then be determined based on the intervention time point or the intervention location, and/or based on the reaction time period or reaction distance.
车辆引导系统还可以被配置为确定在决定时间点或决定位置处在地图数据与环境数据之间关于第一信号单元的特性是否存在矛盾。示例性的特征为:信号单元的类型和/或不同信号组的数量。The vehicle guidance system can also be configured to determine whether there is a discrepancy between the map data and the environment data with respect to the properties of the first signal unit at a determined point in time or at a determined location. Exemplary features are: the type of signal unit and/or the number of different signal groups.
特别地,车辆引导系统可以被配置为基于地图数据来确定第一信号单元的不同信号组的基于地图的数量,作为第一信号单元的特性。此外,车辆引导系统可以被配置为基于环境数据来确定第一信号单元的不同信号组的基于传感器的数量,作为第一信号单元的特性。然后,如果基于地图的信号组数量不同于基于传感器的信号组数量,特别是如果基于传感器的信号组数量大于基于地图的信号组数量,则可以确定在地图数据与环境数据之间存在矛盾。例如,如果基于环境数据识别出不同的信号颜色,而地图数据表示信号单元、特别是信号灯装置仅具有一个信号组,则可能存在矛盾。In particular, the vehicle guidance system can be configured to determine a map-based number of different signal groups of the first signal unit as a characteristic of the first signal unit on the basis of the map data. Furthermore, the vehicle guidance system can be configured to determine a sensor-based number of different signal groups of the first signal unit as a characteristic of the first signal unit on the basis of the environmental data. Then, if the number of map-based signal sets differs from the number of sensor-based signal sets, in particular if the number of sensor-based signal sets is greater than the number of map-based signal sets, it can be determined that there is a discrepancy between the map data and the environment data. For example, a discrepancy may exist if different signal colors are recognized on the basis of the environmental data, while the map data indicate that a signal unit, in particular a signal light arrangement, has only one signal group.
然后,根据是否确定在决定时间点或决定位置处在地图数据与环境数据之间存在矛盾,在第一信号单元处以自动模式或手动模式运行驾驶功能。特别地,车辆引导系统可以被配置为,当确定在决定时间点在地图数据与环境数据之间不存在矛盾时,在第一信号单元处以自动模式运行驾驶功能。替代地或附加地,车辆引导系统可以被配置为,当确定在决定时间点在地图数据与环境数据之间存在矛盾时,在第一信号单元处以手动模式运行驾驶功能。由此可以显著提高驾驶功能的可用性、安全性和舒适性。Then, the driving function is run at the first signal unit in automatic mode or in manual mode, depending on whether it is determined that there is a contradiction between the map data and the environment data at a determined point in time or at a determined location. In particular, the vehicle guidance system can be configured to run the driving function in automatic mode at the first signal unit when it is determined that there is no contradiction between the map data and the environment data at the decision point in time. Alternatively or additionally, the vehicle guidance system can be configured to run the driving function in manual mode at the first signal unit when it is determined that there is a discrepancy between the map data and the surroundings data at a decision point in time. This significantly increases the usability, safety and comfort of driving functions.
车辆引导系统可以被设置为在决定时间点或决定位置之前已确定在地图数据与环境数据之间关于第一信号单元的至少一个特性存在矛盾。然后,作为其响应,可以根据在决定时间点或决定位置处对矛盾存在性的重新检验,决定在第一信号单元处是以自动模式还是以手动模式运行驾驶功能。The vehicle guidance system can be configured such that a discrepancy between the map data and the surroundings data regarding at least one property of the first signal unit has already been determined prior to the determination time or the determination location. In response thereto, it can then be decided whether to operate the driving function at the first signal unit in automatic mode or in manual mode, depending on the rechecking of the existence of a contradiction at a decided point in time or at a decided location.
换言之,车辆引导系统可以被设置为在提早识别出关于信号单元的矛盾之后,首先等到矛盾在之后的时间点是可能被解决还是被确认。在此,可以执行重复检验直到(最后可能的)决定时间点或(最后可能的)决定位置。如果矛盾得到解决,则可以以自动模式运行驾驶功能。如果矛盾没有得到解决,则必要时可以以手动模式运行驾驶功能。通过重复检验所识别的矛盾,可以减少或避免误识别(特别是误报)。由此可以进一步提高驾驶功能的可用性、安全性和舒适性。In other words, the vehicle guidance system can be configured to, after early recognition of a discrepancy with respect to a signal unit, firstly wait until whether the discrepancy is likely to be resolved or confirmed at a later point in time. In this case, repeated checks can be carried out up to the (last possible) decision point in time or the (last possible) decision position. If the conflict is resolved, the driving functions can be run in automatic mode. If the conflict is not resolved, the driving functions can be operated in manual mode if necessary. Misidentifications (particularly false positives) can be reduced or avoided by repeatedly checking identified inconsistencies. As a result, the usability, safety and comfort of the driving functions can be further increased.
车辆引导系统可以被配置为基于关于第一信号单元的数据(特别是地图数据和/或环境数据)来确定位于第一信号单元处的路口的复杂性的复杂性程度。在此,路口可以是车辆所行驶的车道与一个或多个其他交通路线(例如与至少另一车道、至少一个人行横道等)的路口。复杂性程度和/或复杂性例如可以取决于第一信号单元的不同信号组的数量。The vehicle guidance system may be configured to determine the degree of complexity of the complexity of the intersection located at the first signal unit based on data about the first signal unit, in particular map data and/or environmental data. In this case, a junction can be a junction of a lane on which the vehicle is traveling and one or more other traffic routes (for example with at least one other lane, at least one pedestrian crossing, etc.). The degree of complexity and/or complexity can depend, for example, on the number of different signal groups of the first signal unit.
然后,可以根据所确定的复杂性程度,在第一信号单元处以自动模式或手动模式运行驾驶功能。特别是,如果复杂性程度表示相对较低的复杂性(例如仅单个信号组),则必要时可以以自动模式运行驾驶功能。另一方面,如果复杂性程度表示相对较高的复杂性(例如多个不同的信号组),则必要时可以仅以手动模式运行驾驶功能。通过确定和考虑复杂性程度,可以进一步提高驾驶功能的可用性、安全性和舒适性。Depending on the determined degree of complexity, the driving function can then be run at the first signal unit in automatic mode or in manual mode. In particular, if the level of complexity represents a relatively low complexity (for example only a single signal group), it is possible to run the driving functions in automatic mode if necessary. On the other hand, if the degree of complexity represents a relatively high complexity (for example a number of different signal sets), it is possible to operate the driving function only in manual mode if necessary. By determining and taking into account the degree of complexity, the usability, safety and comfort of driving functions can be further improved.
车辆引导系统可以被配置为基于关于第一信号单元的数据(特别是环境数据和/或地图数据)来确定用于车辆的不同行驶方向的不同信号组的数量。然后,可以根据所确定的不同信号组的数量,在第一信号单元处以自动模式或手动模式运行驾驶功能。特别是如果所确定的不同信号组的数量大于一,则必要时可以在第一信号单元处仅以手动模式运行驾驶功能。替代地或附加地,如果所确定的不同信号组的数量等于一,则必要时可以在第一信号单元处以自动模式运行驾驶功能。由此可以进一步提高驾驶功能的可用性、安全性和舒适性。The vehicle guidance system can be configured to determine the number of different signal sets for different driving directions of the vehicle on the basis of data about the first signal unit, in particular environmental data and/or map data. Depending on the determined number of different signal groups, the driving function can then be run at the first signal unit in automatic mode or in manual mode. In particular if the determined number of different signal sets is greater than one, the driving function can optionally be operated only in manual mode on the first signal unit. Alternatively or additionally, if the determined number of different signal groups is equal to one, the driving function can optionally be run in automatic mode on the first signal unit. As a result, the usability, safety and comfort of the driving functions can be further increased.
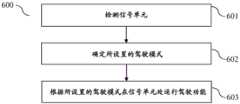
根据另一方面,描述了一种用于提供用于车辆的自动纵向引导的驾驶功能的方法。该方法包括确定关于位于车辆行驶方向前方的第一信号单元的数据。此外,该方法包括根据关于第一信号单元的数据在第一信号单元处以自动模式或手动模式运行驾驶功能。在此,在车辆的自动纵向引导中,在自动模式下可以自动地考虑第一信号单元,并且在手动模式下可以仅在车辆用户确认之后才考虑第一信号单元。According to another aspect, a method for providing a driving function for automatic longitudinal guidance of a vehicle is described. The method includes determining data about a first signal unit located ahead in the direction of travel of the vehicle. Furthermore, the method includes running a driving function at the first signal unit in an automatic mode or in a manual mode depending on the data about the first signal unit. In this case, in the automatic longitudinal guidance of the vehicle, the first signal unit can be taken into account automatically in the automatic mode, and can be taken into account in the manual mode only after confirmation by the vehicle user.
根据另一方面,描述了一种(道路)机动车(特别是乘用车或载重汽车或公共汽车或摩托车),其包括本文中描述的车辆引导系统中的至少一个。According to another aspect, a (road) motor vehicle (in particular a passenger car or truck or bus or motorcycle) is described which comprises at least one of the vehicle guidance systems described herein.
根据另一方面,描述了一种软件(SW)程序。该软件程序可以被设置为在处理器上(例如在车辆的控制单元上)运行,从而执行本文中描述的方法的至少一个。According to another aspect, a software (SW) program is described. The software program may be arranged to run on a processor (eg on a control unit of a vehicle) so as to perform at least one of the methods described herein.
根据另一方面,描述了一种存储介质。该存储介质可以包括软件程序,该软件程序被配置为在处理器上运行,从而执行本文中描述的方法的至少一个。According to another aspect, a storage medium is described. The storage medium may include a software program configured to run on a processor so as to perform at least one of the methods described herein.
在本文的范畴中,术语“自动驾驶”可以理解为具有自动纵向或横向引导的驾驶,或者具有自动纵向和横向引导的自主驾驶。自动驾驶例如可以涉及在高速公路上较长时间的驾驶或者涉及在泊车或调整车辆过程中时间有限的驾驶。术语“自动驾驶”包括具有任意自动化程度的自动驾驶。示例性的自动化程度有辅助驾驶、部分自动驾驶、高度自动驾驶或全自动驾驶。这些自动化程度由联邦公路研究所(BASt)定义(请参阅BASt出版物“研究报告”,版本11/2012)。在辅助驾驶中,驾驶员持续执行纵向或横向引导,而系统则在一定限制范围内接管相应的其他功能。在部分自动驾驶(TAF)中,系统在一定时间段内和/或在特定情况下接管纵向和横向引导,其中驾驶员必须如在辅助驾驶中一样持续监控系统。在高度自动驾驶(HAF)中,系统在一定时间段内接管纵向和横向引导,而无需驾驶员持续地监控系统,然而驾驶员必须能够在一定时间内接管车辆引导。在全自动驾驶(VAF)中,系统可以对于特定应用场合在所有情况下自动管控驾驶,该应用场合不再需要驾驶员。上述四个自动化程度对应于SAE J3016标准(SAE-美国汽车工程师协会)的SAE级别1至4。例如,高度自动驾驶(HAF)对应于SAE J3016标准的3级。此外,在SAE J3016中还规定了SAE 5级作为最高自动化程度,其未包含在BASt的定义中。SAE 5级对应于无人驾驶,其中系统可以在整个行驶期间如人类驾驶员一样自动处理所有情况,一般不再需要驾驶员。本文中所述的方面特别是涉及一种根据SAE 2级设计的驾驶功能或驾驶员辅助功能。In the context of this document, the term "autonomous driving" is to be understood as driving with automatic longitudinal or lateral guidance, or autonomous driving with automatic longitudinal and lateral guidance. Automated driving can, for example, involve prolonged driving on the highway or time-limited driving while parking or adjusting the vehicle. The term "autonomous driving" includes automated driving with any degree of automation. Exemplary degrees of automation are assisted driving, partially autonomous driving, highly automated driving, or fully autonomous driving. These degrees of automation are defined by the Federal Highway Research Institute (BASt) (see BASt publication "Research Report", edition 11/2012). In assisted driving, the driver continues to perform longitudinal or lateral guidance, while the system takes over the corresponding other functions within certain limits. In partially automated driving (TAF), the system takes over the longitudinal and lateral guidance for a certain period of time and/or in certain situations, where the driver has to continuously monitor the system as in assisted driving. In highly automated driving (HAF), the system takes over the longitudinal and lateral guidance for a certain period of time without the driver constantly monitoring the system, however the driver must be able to take over the vehicle guidance for a certain period of time. In fully automated driving (VAF), the system can automatically manage driving in all situations for a specific application, which no longer requires a driver. The above four degrees of automation correspond to SAE levels 1 to 4 of the SAE J3016 standard (SAE-Society of Automotive Engineers). For example, Highly Automated Driving (HAF) corresponds to Level 3 of the SAE J3016 standard. In addition, SAE Level 5 is specified in SAE J3016 as the highest degree of automation, which is not included in the definition of BASt. SAE Level 5 corresponds to autonomous driving, where the system can handle all situations automatically as a human driver would during the entire journey, generally without a driver. The aspects described herein relate in particular to a driving function or driver assistance function designed according to SAE Level 2.
应注意的是,本文中描述的方法、装置和系统不仅可以单独使用,而且可以与本文中描述的其他方法、装置和系统组合使用。此外,本文中描述的方法、装置和系统的任何方面均可以彼此以多种方式组合。特别是权利要求的特征可以彼此以多种方式组合。It should be noted that the methods, devices and systems described herein can be used not only alone but also in combination with other methods, devices and systems described herein. Furthermore, any aspects of the methods, apparatus, and systems described herein may be combined with each other in various ways. In particular the features of the claims can be combined with one another in various ways.
附图说明Description of drawings
下面借助于实施例更详细地说明本发明。其中:The invention is explained in more detail below with the aid of examples. in:
图1示出了车辆的示例性组件;Figure 1 shows exemplary components of a vehicle;
图2a示出了示例性的信号灯装置;Figure 2a shows an exemplary signal light arrangement;
图2b示出了示例性的交通标志;Figure 2b shows an exemplary traffic sign;
图3示出了示例性的交通状况;Figure 3 shows an exemplary traffic situation;
图4示出了示例性的用户界面;并且Figure 4 shows an exemplary user interface; and
图5a至图5j以及图6示出了用于提供用于车辆在信号单元处的自动纵向引导的驾驶功能的示例性方法的流程图。5 a to 5 j and FIG. 6 show a flowchart of an exemplary method for providing a driving function for automatic longitudinal guidance of a vehicle at a signaling unit.
具体实施方式Detailed ways
如开头所述,本文涉及提高车辆驾驶功能、特别是驾驶员辅助系统的可靠性、可用性和/或舒适性,其与在车辆所行驶车道或道路与另一交通路线的路口处的信号单元相关联。As already stated at the outset, this document concerns the improvement of the reliability, usability and/or comfort of vehicle driving functions, in particular driver assistance systems, in relation to signaling units at the intersection of a lane or road on which the vehicle is traveling and another traffic route couplet.
图1示出了车辆100的示例性组件。车辆100包括一个或多个环境传感器103(例如一个或多个图像摄像机、一个或多个雷达传感器、一个或多个激光雷达传感器、一个或多个超声波传感器等),其被设置为检测关于车辆100的环境(特别是关于位于车辆100行驶方向前方的环境)的环境数据。此外,车辆100还包括一个或多个执行器102,其被设置为作用于车辆100的纵向和/或横向引导。示例性的执行器102是制动系统、驱动马达、转向装置等。FIG. 1 shows exemplary components of a
控制单元101可以被设置为基于一个或多个环境传感器103的传感器数据(即基于环境数据)来提供驾驶功能,特别是驾驶员辅助功能。例如,基于传感器数据可以识别车辆100的行驶轨迹上的障碍物。然后,控制单元101可以控制一个或多个执行器102(例如制动系统),以便使车辆100自动减速,从而避免车辆100与障碍物的碰撞。The
特别是在车辆100的自动纵向引导的范畴中,除了前方车辆之外,还可以考虑在车辆100所行驶的车道或道路上的一个或多个信号单元(例如信号灯装置和/或交通标志)。在此,特别是可以考虑信号灯装置或红绿灯装置的状态,使得车辆100在与其自身(所规划的)行驶方向相关的红灯处自动实现减速直到交通灯的停止线,和/或在绿灯的情况下(必要时再次)加速。In particular in the context of automatic longitudinal guidance of
信号灯装置在不同的国家可以设计得非常不同,并且此外在行驶方向信号灯分配方面也具有不同的复杂度。因此,不同的行驶方向可以由第一组信号或一个信号组捆绑地调节,并且另一方向可以由另一信号组调节。此外,信号组的重复信号也可以在地理上位于十字路口的不同位置。因此,对于控制单元101(在本文中也称为车辆引导系统)可能难以基于传感器数据来识别十字路口处的信号灯装置的哪个或哪些信号与车辆100的所规划的行驶方向相关,而哪些不相关(特别是如果车辆100离信号灯装置仍相对较远)。Signal systems can be designed very differently in different countries and also have different complexity with respect to the assignment of the direction signals. Thus, different directions of travel can be set in bundles by a first set of signals or by one set of signals, and another direction can be set by another set of signals. In addition, the repeated signals of the signal group can also be geographically located at different positions of the intersection. Therefore, it may be difficult for the control unit 101 (also referred to herein as the vehicle guidance system) to identify based on the sensor data which signal(s) of the signal light device at the intersection are relevant to the planned direction of travel of the
图2a示出了示例性的信号灯装置200。图2a所示的信号灯装置200具有四个不同的信号发生器201,其被布置在通往十字路口的入口处的不同位置。左侧信号发生器201具有向左的箭头202,从而表示该信号发生器201适用于左转。两个中间的信号发生器201具有向上的箭头202(或没有箭头202),从而表示这两个信号发生器201适用于直行。这两个信号发生器201的各个指示灯形成信号组。此外,右侧信号发生器201具有向右的箭头202,从而表示该信号发生器201适用于右转。FIG. 2 a shows an exemplary signal
图2a中所示的信号灯装置200仅是信号灯装置200的许多不同的可能设计方案中的一个示例。信号灯装置200可以具有相对大量的不同特征。示例性特征如下:The signal
·信号发生器201和/或信号组的数量;- the number of
·一个或多个信号发生器201的位置;和/或· the location of one or
·信号发生器201对十字路口上可能的行驶方向的分配。Assignment of the
图2b示出了示例性的停车标志,作为交通标志210,通过其控制交通路口处、特别是十字路口处的先行权。车辆100的控制单元101可以被配置为基于一个或多个环境传感器103的传感器数据(即基于环境数据)和/或基于数字地图信息(即地图数据)来识别在车辆100所行驶的道路或车道上与车辆100的先行权相关的交通标志210。FIG. 2 b shows an exemplary stop sign as a
图3示例性地示出了在车道上向信号单元200、210(特别是向信号灯装置200和/或向交通标志210)移动的车辆100。车辆100的一个或多个环境传感器103可以被配置为检测关于信号单元200、210的传感器数据(特别是图像数据)。然后可以分析传感器数据(例如借助于图像分析算法),以确定信号单元200、210的一个或多个特征的特性。特别是可以基于传感器数据确定信号单元200、210是信号灯装置200还是交通标志210。此外可以确定信号灯装置200的哪个信号发生器201与车辆100的(所规划的)行驶方向相关。此外可以确定相关的信号发生器201的(信号)状态(例如颜色,如红色、黄色或绿色)。FIG. 3 shows an example of a
基于环境数据可以确定信号单元200、210的特征特性的质量和/或可靠性通常取决于车辆100与信号单元200、210的距离311。此外,当前的天气条件通常也对所确定的特征特性的质量和/或可靠性具有显著影响。此外,质量和/或可靠性可能对于不同的特征而不同。The quality and/or reliability with which characteristic properties of signaling
车辆100可以具有存储单元104,在其上存储有关于车辆100所行驶的道路网络的数字地图信息(即地图数据)。地图数据可以显示道路网络中一个或多个信号单元200、210的一个或多个特征的特性作为属性。信号灯装置200的地图数据特别是可以显示一个或多个信号发生器201或信号组201对不同的可能行驶方向的分配。换言之,地图数据可以显示哪个信号发生器或哪个信号组201负责哪个行驶方向的放行。必要时可以通过车辆100处的无线通信链路(例如WLAN或LTE通信链路)借助于车辆100的通信单元105接收地图数据。The
车辆100的控制单元101可以被配置为(例如基于车辆100的当前位置且基于所规划的行驶路线和/或基于一个或多个环境传感器103的环境数据)确定车辆100正在驶向位于前方的信号单元200、210。此外,控制单元101可以基于(所存储和/或所接收的)地图数据来确定位于前方的信号单元200、210的一个或多个特征的特性。特别是可以基于地图数据来确定信号灯装置200的哪个信号发生器或哪个信号组201被分配给车辆100的当前或所规划的行驶方向。此外,可以基于环境数据来确定所分配的信号发生器或所分配的信号组201的当前状态。然后,可以在此基础上以可靠且舒适的方式执行自动驾驶功能(例如车辆100的自动纵向引导)。特别是可以通过考虑地图数据,在车辆100与信号单元200的距离311相对较大时就已确定信号单元200的一个或多个相关特征的特性,从而可以提高自动驾驶功能的可靠性、可用性和舒适性。The
车辆100可以被配置为使用关于车辆100将通过或已通过的信号单元200、210的信息来创建和/或补充地图数据。地图数据可以由车辆100在本地创建和/或补充,和/或由中央单元300(例如由后端服务器)集中创建和/或补充(见图3)。在紧邻信号单元200、210的附近,通常可以由车辆100的一个或多个环境传感器103检测环境数据,其以精确的方式显示信号单元200和210的一个或多个特征的特性。特别是可以在紧邻的附近区域内基于所检测的环境数据以精确且可靠的方式确定在信号发生器或信号组201与可能的行驶方向之间的分配。The
车辆100可以被配置为通过无线通信链路301向中央单元300传输所确定的信息(例如环境数据和/或所确定的一个或多个特征的特性)(与相应的信号单元200、210的标识相关,例如与信号单元200、210的位置相关)。然后,中央单元300可以基于大量车辆100所提供的信息创建和/或更新地图数据,其对于大量不同的信号单元200、210分别显示一个或多个特征的特性作为属性。然后,可以将地图数据提供给各个车辆100,以(如上所述)辅助自动驾驶功能的运行。The
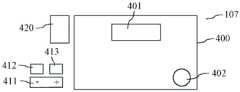
车辆100通常包括具有一个或多个操作元件和/或具有一个或多个输出元件的用户界面107。图4示出了具有显示单元400的示例性用户界面107,特别是具有用于输出视觉信息的屏幕。在显示单元400上,例如可以通过显示元件401输出在位于前方的信号单元200、210处自动引导车辆100的建议。替代地或附加地,必要时可以提供借以显示驾驶功能的状态(例如激活或非激活)的显示元件402。
替代地或附加地,用户界面107可以包括至少一个扬声器420作为输出元件,通过其可以向车辆100的驾驶员发出听觉输出(例如警告音)。Alternatively or additionally, the
此外,用户界面107可以包括使得车辆100的驾驶员可激活和/或参数化驾驶功能的一个或多个操作元件411、412、413。示例性操作元件是摇杆411,其使得驾驶员可以指定、特别是增大或减小车辆100的设定速度(即目标行驶速度)。另一示例性操作元件是设置操作元件412,其使得驾驶员可以将当前行驶速度指定为设定速度和/或接受在位于前方的信号单元200、210处自动引导车辆100的建议。此外,用户界面107可以包括恢复操作元件413,其使得驾驶员可以例如以预定的设定速度再次激活驾驶功能。Furthermore, the
车辆100的控制单元101可以被设计为在城市区域中提供车辆100的自动纵向引导。该驾驶功能例如可以被称为城市巡航控制(UCC)驾驶功能。在此,可以在自动模式(aUCC)和/或手动模式(mUCC)下提供驾驶功能。在此,必要时可以使得驾驶员可通过用户界面107来指定应当是以自动模式还是手动模式运行驾驶功能。The
车辆100的控制单元101可以被配置为基于一个或多个环境传感器103的环境数据和/或基于地图数据(结合车辆100的位置传感器106的位置数据)检测在车辆100的行驶路线上位于前方的信号单元200、210。在UCC驾驶功能的手动模式下,则可以通过用户界面107发出关于在车辆100的自动纵向引导中是否应当考虑信号单元200、210的建议或询问。然后,车辆100的驾驶员可以例如通过操纵设置操作元件412来接受或拒绝或者忽略该建议。另一方面,在UCC驾驶功能的自动模式下,必要时可以在车辆100的自动纵向引导中自动(即无需驾驶员的反馈)考虑所识别的信号单元200、210。The
如果在车辆100的自动纵向引导中考虑所识别的信号单元200、210,则可以(根据信号单元200、210的类型和/或(信号)状态)实现自动减速,以使车辆100(例如在红色交通灯处或在停车标志处)自动停止。此外,(例如在信号单元200、210的(信号)状态变化之后,例如在变为绿色之后)可以实现车辆100的自动起步。然后,车辆100可以再次自动加速到设定速度(通过考虑所指定的与前车的最小或目标距离)。If the identified signaling
由此,利用UCC驾驶功能可以使得车辆100的驾驶员在具有一个或多个信号单元200、210的道路上也可以使用ACC驾驶功能(而不必在各个信号单元200、210处分别停用和再次激活ACC功能)。Thus, the use of the UCC driving function enables the driver of the
控制单元101可以被配置为基于环境数据和/或基于地图数据来确定在自动纵向引导中是否可以考虑位于前方的信号单元200、210。如果确定在自动纵向引导中无法考虑位于前方的信号单元200、210,则可以向车辆100的驾驶员进行输出(例如通过显示单元400、402进行的视觉输出),以通知车辆100的驾驶员在自动纵向引导中无法考虑位于前方的信号单元200、210。该显示可以被称为“不可用性显示”。然后,车辆100的驾驶员的任务是必要时使车辆100在信号单元200、210之前减速(例如,因为交通灯切换到红色,或者因为信号单元200、210为停车标志)。The
此外,控制单元101可以被设置为在UCC驾驶功能运行期间识别出无法(再)自动纵向引导车辆100(例如,因为驾驶员在车辆100的纵向引导中进行了手动干预)。在这种情况下,可以向车辆100的驾驶员发出接管请求(TOR),以促使驾驶员手动接管车辆100的纵向引导。Furthermore, the
车辆100可以包括一个或多个驾驶员传感器108,其被设置为检测关于车辆100的驾驶员的传感器数据(这些传感器数据在本文中也称为驾驶员数据)。示例性的驾驶员传感器108是对准车辆100的驾驶员位置的摄像机。控制单元101可以被设置为基于驾驶员数据来确定驾驶员对驾驶任务或对驾驶功能的监控是否具有足够高的注意力。替代地或附加地,可以确定驾驶员对驾驶任务或对驾驶功能监控的注意力的程度。此外,控制单元101可以被配置为根据所确定的驾驶员的注意力程度来运行驾驶功能,特别是UCC驾驶功能。由此可以进一步提高驾驶功能的舒适性和安全性。The
如上所述,控制单元101可以被配置为基于地图数据(与关于车辆100的当前位置的位置数据相关联)来识别或检测位于前方的信号单元200、210。此外,控制单元101可以被配置为基于车辆100的一个或多个环境传感器103(特别是摄像机)的环境数据来识别或检测位于前方的信号单元200、210。自动(UCC)驾驶功能在所识别的信号单元200、210处的运行可以取决于As mentioned above, the
·是否基于地图数据和/或环境数据识别出信号单元200、210;· Whether the
·在哪个识别时间点或从哪个识别时间点开始基于地图数据和/或环境数据识别出信号单元200、210;和/或· at or since which identification time point the
·相对于信号单元200、210的识别时间点在哪个配置时间点进行了UCC驾驶功能的配置更改(例如在自动模式和手动模式之间)。• At which point in time the configuration was changed with respect to the point in time of identification of the
控制单元101特别是可以被配置为,当仅基于环境数据而不基于地图数据识别出信号单元200、210时,则通知驾驶员在所识别的信号单元200和210处纵向引导的自动辅助不可用(例如通过经由用户界面107的视觉、触觉和/或听觉输出)。The
因此,控制单元101可以被配置为,必要时仅当不仅借助于环境数据而且借助于地图数据都识别出信号单元200、210时,才在所识别的信号单元200、210处提议和/或提供纵向引导的自动辅助。如果无法在所识别的信号单元200、210处提供纵向引导的自动辅助,则可以通过用户界面107向驾驶员通知自动辅助的不可用性(通过不可用性输出)。由此可以使得UCC驾驶功能可安全运行。特别是可以由此可靠地避免如下情况,即因为驾驶员错误地假设在所识别的信号单元200、210处的纵向引导中会获得辅助,而以不允许的方式驶过所识别的信号单元200、210的停止线。Therefore, the
在具有多个信号组201的信号单元200中,特别是在信号灯装置200中,经常无法可靠地识别出哪个交通灯颜色与车辆100相关。在此,信号组201可以包括信号灯装置200的所有同步切换的交通灯或信号发生器。由此,在具有一方面用于左转并且另一方面用于直行或右转的单独切换的交通灯的十字路口处,存在具有两个不同信号组201的通路。In
控制单元101可以被设置为必要时仅在具有单个信号组201的信号灯装置200处提供UCC驾驶功能的自动模式,即aUCC。相反,在具有多个不同信号组201的信号灯装置200处可以提供UCC驾驶功能的手动模式,即mUCC。在这种情况下,驾驶员通过用户界面107获得纵向引导辅助的建议,然后驾驶员必要时可以通过操纵用户界面107的操作元件412接受该建议。(这例如使得在红色信号组201处自动制动)。The
为了使得驾驶功能在接近信号灯装置200时知道信号灯装置100具有多少个不同的信号组201以及可以利用哪些功能特性(aUCC或mUCC)响应于信号灯装置200,可以将信号组201的数量作为地图属性存储在地图数据中(即存储在数字地图信息中)。由于这些地图数据在个别情况下可能有误或者信号组201的数量可能由于改造措施而变化,因此可能发生如下情况,其中在位于前方的信号单元200、210中UCC驾驶功能(基于地图数据)假设仅具有一个信号组201的信号灯装置200,但基于环境数据识别出两个不同的交通灯颜色。In order for the driving function to know how many
如果关于信号单元200、210的地图属性与基于由车辆100检测的环境数据所识别的不同,则这可能是因为地图属性不正确或者因为环境数据被错误地解读(误报)。环境数据的误报通常仅在相对较短的时间段内存在。If the map properties for the
为了可以排除误报,控制单元101可以被设置为在进行车辆反应之前(特别是在产生不可用性输出之前,或以手动模式运行驾驶功能之前)响应于所识别的在环境数据与地图数据之间的偏差或响应于所识别的在环境数据与地图数据之间的矛盾,重复执行对情况的检验。通过重复检验可能实现矛盾的解决,从而可以改善驾驶功能对情况的反应。这种延迟反应可以延迟到尽可能接近所识别的信号单元200、210的决定时间点或决定位置,然而其仍留有足够的时间,使得即使在延迟的反应之后也还能够自动和/或手动地安全地响应于信号单元200、210。In order to rule out false alarms, the
如果UCC驾驶功能在接近根据地图数据仅有一个信号组201的信号灯装置200时基于环境数据检测到多个不同的交通灯颜色,则由此可以延迟关于是以手动制动还是以自动制动到信号灯装置200(即是执行mUCC还是aUCC)的决定。这在如下情况下是可行的,即足够早地识别出信号组偏差,使得即使在延迟的反应之后也仍可以安全地响应于信号灯装置200。在这种情况下,如果识别出信号组偏差,则驾驶功能暂时不对信号灯装置200进行反应。仅在决定时间点或决定位置处才可以决定是以自动模式还是以手动模式运行驾驶功能,最迟在该决定时间点或决定位置处必须向驾驶员发出mUCC建议,以便在最大舒适性减速度的预设下,既符合建议的预定最小输出持续时间,又符合车辆100的必要制动距离。If the UCC driving function detects several different traffic light colors on the basis of the surrounding data when approaching a
在决定时间点,如果环境数据与地图数据的偏差或矛盾仍然存在,则优选输出mUCC建议。另一方面,如果在决定时间点不再识别出偏差,则可以假设环境数据的(临时)误报,并且驾驶功能可以自动(在aUCC模式下)调节到信号灯装置200。At a decision point in time, if a deviation or contradiction between the environmental data and the map data still exists, an mUCC suggestion is preferably output. On the other hand, if at the decision point in time no further deviations are detected, a (temporary) false positive of the environmental data can be assumed and the driving function can automatically (in aUCC mode) adjust to the signal
因此,控制单元101可以被设置为确定在所识别的信号单元200、210之前的决定时间点或决定位置,必须最迟在该决定时间点或决定位置处做出是以自动模式还是以手动模式运行UCC驾驶功能的决定。如果在决定时间点或在决定位置处在信号单元200、210的基于环境数据的识别与信号单元200和210的基于地图数据的识别之间存在矛盾,则可以以手动模式运行UCC驾驶功能。如果不存在矛盾,则可以以自动模式运行UCC驾驶功能。由此可以提高UCC驾驶功能的舒适性和安全性。Thus, the
因此,控制单元101可以被设置为以灵活的方式决定对于所识别的信号单元200、210而言是以自动模式还是以手动模式运行UCC驾驶功能。因此,UCC驾驶功能可以在自动执行自动制动和手动提供自动制动的混合模式下运行。特别是可以根据路口(例如十字路口)的复杂性来自动执行自动制动,或者可以在执行自动制动之前识别驾驶员确认的需求。Thus, the
换言之,控制单元101可以被配置为基于地图数据和环境数据灵活地决定在所识别的信号单元200、210处是以自动模式还是以手动模式运行UCC功能。特别是可以决定是否能够以自动方式安全地处理所识别的路口,和/或是否能够确定与车辆100相关的信号组201。In other words, the
如果在自动模式下运行UCC功能,并且与车辆100相关的信号组201具有与制动相关的颜色,则可以自动地启动自动制动(无需车辆100的驾驶员的确认)。自动制动的自动启动可以通过用户界面107(例如通过仪表盘)来告知驾驶员。If the UCC function is run in automatic mode, and the
如果无法安全处理十字路口,则可以以手动模式运行UCC功能,并且可以通过用户界面107、特别是通过仪表盘(必要时以视觉方式)向驾驶员输出执行自动制动的建议。特别是可以向驾驶员显示哪个交通灯颜色被车辆100视为相关。此外,可以向驾驶员显示可以通过哪个操作元件412接受建议。然后驾驶员必要时可以接受建议(例如通过操作元件412的操纵),然后必要时可以关于所识别的信号单元200、210启动和/或执行自动制动。在未接受建议的情况下,必要时可以自动地纵向引导车辆100穿过路口(在此不考虑所识别的信号单元200、210)。If the intersection cannot be handled safely, the UCC function can be run in manual mode and a recommendation to perform automatic braking can be output to the driver via the
通过UCC驾驶功能在自动模式或手动模式下的灵活运行(取决于所识别的信号单元200、210的复杂性),可以提高UCC驾驶功能的舒适性、安全性和可用性。The comfort, safety and usability of the UCC driving functions can be increased by the flexible operation of the UCC driving functions in automatic or manual mode (depending on the complexity of the identified signaling
可以使得车辆100的驾驶员能够通过用户界面107来配置UCC驾驶功能。在此,驾驶员例如可以指定(如果可能的话)是否应当以自动模式(aUCC)下运行UCC驾驶功能,或者原则上是否应当仅以手动模式(mUCC)运行UCC驾驶功能。例如可以在配置时间点或配置位置处(在车道或道路网络内)进行配置或更改配置。A driver of the
可能发生的是,驾驶功能、特别是UCC驾驶功能已在与信号单元200、210相关的配置时间点或配置位置处运行。控制单元101可以被设置为,在驾驶功能运行时仅当车辆100处于配置更改不会引起车辆立即反应的状态时,才考虑在配置时间点或配置位置处产生的驾驶功能配置的更改。It may happen that a driving function, in particular a UCC driving function, is already running at the configuration point in time or at the configuration location associated with the
在UCC驾驶功能的范畴中,仅当主动制动已停止或主动制动被其他影响中断(例如被驾驶员中断)时,必要时才可以通过用户界面107接受配置更改,其可以中断向特定信号单元200、210的主动制动。由此,配置更改仅影响下一个具有信号单元200、210的驾驶状况。因此,如果在对交通灯200的主动交通灯制动期间(例如由副驾驶)停用UCC驾驶功能,则车辆100将继续制动,直到静止在交通灯200前。只有在制动之后,驾驶功能才会实际停用。In the context of the UCC driving functions, configuration changes can only be accepted via the
在UCC驾驶功能的另一示例中,在功能已经调节到特定的信号单元200、210的同时,必要时可以将所识别的信号单元200、210从自动接管(aUCC)切换到手动接管(mUCC)。然后,优选地仅在已经运行的调节结束之后才执行该更改,从而仅对于之后识别的信号单元200、210进行手动建议的输出。In another example of the UCC driving function, while the function has been adjusted to a
因此,控制单元101可以被配置为检验是否在UCC驾驶功能的配置更改的配置时间点或配置位置处已经识别出UCC驾驶功能的信号单元200、210和/或已经进行了关于所识别的信号单元200、210的自动纵向引导。如果是这种情况,则必要时仅针对紧随其后的信号单元200、210(而不针对已经识别和/或考虑的信号单元200、210)考虑配置更改。特别是,必要时仅在与已经识别的信号单元200、210相关的自动纵向引导完成之后,才进行驾驶功能的停用。由此可以实现UCC驾驶功能的特别安全的运行。Therefore, the
如上所述,控制单元101可以被配置为基于环境数据(并且必要时基于地图数据)检测位于车辆100行驶方向前方的信号单元200、210。此外,可以基于环境数据来确定信号单元200、210的信号组201的颜色。As mentioned above, the
可能发生的是(例如在信号组201的颜色相对较晚地从绿色变为黄色时),无法再对所检测的信号单元200、210执行自动和/或手动制动(以某个定义的最大减速度)。在这种情况下,可以向车辆100的驾驶员发出不可用性输出,以向驾驶员显示对于所检测的信号单元200、210不会进行自动制动。然而,在这种情况下,不可用性输出、特别是不可用性显示的输出通常是没有意义的,因为车辆100的驾驶员也无法或不应再执行手动制动。It may happen (for example when the color of the
控制单元101可以被配置为当仅在到达信号单元200、210之前不久识别出信号单元200、210无法被考虑在车辆100的自动纵向引导中时,才抑制不可用性输出。控制单元101特别是可以被配置为在识别出对信号单元200、210的辅助不可用的时间点或位置处进行检验:The
·直到到达信号单元200、210的持续时间是否等于或低于特定的持续时间阈值;和/或· whether the duration until reaching the
·直到到达信号单元200、210的距离311是否等于或低于特定的距离阈值。• Whether the
在此,持续时间阈值和/或距离阈值分别可以与速度相关或无关。持续时间阈值和/或距离阈值可以被定义为使得对于大于持续时间阈值的持续时间和/或对于大于距离阈值的距离而言,驾驶员手动制动车辆100来使车辆100在所识别的信号单元200、210处停止仍然是可能的和/或有意义的。在此,例如可以考虑车辆100的最大可能减速度和/或驾驶员的预定反应时间。In this case, the duration threshold and/or the distance threshold, respectively, can be speed-dependent or independent. The duration threshold and/or distance threshold may be defined such that for a duration greater than the duration threshold and/or for a distance greater than the distance threshold, the driver manually brakes the
控制单元101可以被配置为当确定如下情况时,抑制不可用性输出的发出:The
·直到到达信号单元200、210的持续时间等于或低于特定的持续时间阈值;和/或· The duration until reaching the
·直到到达信号单元200、210的距离311等于或低于特定的距离阈值。• Until the
另一方面,可以促使不可用性输出的发出。On the other hand, the emission of an unavailability output can be induced.
因此,控制单元101可以被配置为使得在到达交通灯200之前的对驾驶员不重要的区域中不会由于误识别和/或交通灯较晚地变为黄色(特别是因为手动制动不再有意义)而输出不可用性显示(NVA),因为这种NVA的输出将构成对驾驶员的附加干扰因素。Therefore, the
在此,特别是可以使得在到达交通灯200之前的特定距离x311[单位:m]和/或特定时间间隔[单位:s]处不输出NVA。在此,到交通灯200的停止位置的最小距离x可以与速度无关,并且必要时可以构成下限值。在该距离值下,则必要时原则上不进行NVA的显示。时间标准可以取决于速度。该标准特别是可以在相对较高的速度范围内使得不输出NVA。通过抑制NVA的输出,可以对于车辆100的驾驶员提高驾驶功能的舒适性。In this case, it is possible in particular not to output the NVA at a certain distance x 311 [unit: m] and/or at a certain time interval [unit: s] before reaching the
如上所述,可以以手动模式运行UCC驾驶功能,其中向车辆100的驾驶员发出在所识别的信号单元200、210处辅助纵向引导的建议。然后,车辆100的驾驶员可以选择接受建议(例如通过操纵设置操作元件212)。如果该建议被接受,则在需要时例如可以在所识别的信号单元200、210处执行自动制动。As mentioned above, the UCC driving function can be operated in a manual mode, in which a recommendation to assist the longitudinal guidance at the identified signaling
可能发生的是,例如如果车辆100在直道上行驶,则在到达信号单元200、210之前的相对较大的(时间和/或空间)距离311处(基于环境数据)就已检测到位于前方的下一个信号单元200、210。在该时刻,所识别的信号单元200、210可能与车辆100的纵向引导和/或车辆100的驾驶员还不相关。向车辆100的驾驶员发出例如关于在所识别的信号单元200、210处辅助自动纵向引导的提议可能被驾驶员感知为受到干扰和/或令人烦躁。It may happen that, for example, if the
此外可能发生的是,信号单元200、210在之后的时间点被遮蔽,从而不再被识别。这可能会导致撤回对驾驶员的建议,从而导致驾驶员的困惑。Furthermore, it can happen that the
控制单元101可以被配置为确定与所识别的信号单元200、210的(空间和/或时间)距离311是否等于或大于输出阈值。此外,控制单元101可以被配置为仅当与所识别的信号单元200、210的(空间和/或时间)距离311等于或小于输出阈值时,才产生关于所识别的信号单元200、210的输出(例如在自动纵向引导中考虑所识别的信号单元200、210的建议)。The
因此,控制单元101可以被配置为考虑与所识别的信号单元200、210的所需最小输出距离。关于最小输出距离的条件的缺少可能会导致驾驶员烦躁,因为尽管信号单元200、210(例如红色交通灯)与驾驶员(还)不相关,但可能在屏幕400上(例如在仪表盘和/或平视显示器中)显示关于在所识别的信号单元200、210处辅助自动纵向引导的建议的不合理切换。这种切换例如可能由摄像机识别中的不确定性(由于相对较大的距离)引起。Accordingly, the
控制单元101可以被设置为仅在低于与信号单元200、210的特定距离时才发出关于信号单元200、210的建议。在此,当车辆100位于信号单元200、210之前的第x排(x>l)时,必要时不进行显示。由此,可以消除错误和/或不合理的显示。因此,控制单元101可以被配置为只要不低于与信号单元200、210的预定输出距离311,就抑制建议的输出。由此可以提高用户的舒适性。The
控制单元101可以被设置为在第一信号单元200、210处结束车辆100的纵向引导辅助之后,顺序地搜索(紧)跟在其后的在车辆100的纵向引导中可被或应被考虑的第二信号单元200、210。特别是在mUCC驾驶功能的范畴中,可以在第一信号单元200、210处的制动过程完成之后发出考虑随后的第二信号单元200、210的建议。替代地,在aUCC驾驶功能的范畴中,可以在第一信号单元200、210处的制动过程完成之后,进行后续第二信号单元200、210的自动考虑(以及必要时与之相关联的自动制动)。The
随后的第二信号单元200、210的识别特别是在从交通灯处(即第一信号单元200、210处)起步时可能会受到妨碍(例如因为环境数据部分地仍然显示关于第一信号单元200、210的信息)。这可能会导致对于车辆100的驾驶员而言不合理的驾驶功能行为。The subsequent recognition of the
控制单元101可以被配置为确定从车辆100在第一信号单元200、210处起步以来的持续时间和/或空间距离。考虑后续第二信号单元200、210的建议的输出和/或后续第二信号单元200、220的自动考虑可以被抑制,The
·只要持续时间小于或等于持续时间阈值;和/或· as long as the duration is less than or equal to the duration threshold; and/or
·只要车辆100与第一信号单元200、210的空间距离小于或等于距离阈值;和/或· as long as the spatial distance between the
·只要车辆100的行驶速度小于或等于速度阈值。• As long as the travel speed of the
因此,控制单元101可以被配置为在车辆100起步之后在限定的时间段内抑制所有考虑信号单元200、210的手动和/或自动建议。替代地或附加地,为了允许手动和/或自动建议,可能需要超过车辆100的最小速度。Thus, the
特别是可在车辆100起步之后开启锁定计时器,其抑制从“行驶”状态开始直到限定时间的所有建议。此外,必要时在达到限定速度之前不发出任何建议。由此可以进一步提高驾驶功能的舒适性。In particular, a lockout timer can be started after the
如上所述,车辆100可以包括一个或多个驾驶员传感器108,其被配置为检测关于车辆100的驾驶员的驾驶员数据(即传感器数据)。可以根据驾驶员数据运行UCC驾驶功能。特别是可以根据驾驶员数据执行或必要时抑制向车辆100的驾驶员的信息输出。As noted above, the
车辆100的控制单元101可以被设置为基于驾驶员数据来确定驾驶员是否对驾驶任务或对驾驶功能的监控有足够的注意力。此外,控制单元101可以被配置为当确定驾驶员没有足够的注意力时,通过输出视觉和/或触觉信号来补充显示在用户界面107的屏幕400上的不可用性显示(NVA)。由此可以提高UCC驾驶功能的舒适性和安全性。The
例如,如果识别出驾驶功能(例如由于交通灯的较晚识别、交通灯较晚切换为黄色、摄像机103被遮蔽等)无法再及时对交通灯做出反应(从而在交通灯处的自动制动不可用),则可以输出不可用性显示。NVA可以例如显示在仪表盘和/或平视显示器中。如果驾驶员在输出NVA的时间点注意力不集中,这可能会导致驾驶员忽略视觉提示(并且继续假设在自动纵向引导中将考虑交通灯200)。For example, if it is recognized that the driving function (e.g. due to late recognition of traffic lights, late switching of traffic lights to yellow,
因此,除了视觉提示之外,例如可以向被识别为注意力不集中的驾驶员发出听觉信号,以请求驾驶员注意。替代地或附加地,可以实现方向盘振动和/或激活方向盘处的灯带。由此可以确保显示NVA的交通灯不会被驾驶员忽视。Thus, in addition to visual cues, for example an audible signal can be issued to a driver identified as being inattentive in order to request the driver's attention. Alternatively or additionally, a vibration of the steering wheel and/or activation of a light strip on the steering wheel can be realized. This ensures that traffic lights displaying NVA are not overlooked by drivers.
借助于车内摄像机108的传感器数据,可以通过驾驶员模型来确定驾驶员的状况。如果识别出驾驶员注意力不集中,除了不可用性显示之外,还可以发出声音。替代地或附加地,可以产生附加的触觉反馈或另外的视觉反馈。With the aid of sensor data from
在驾驶功能、特别是驾驶员辅助功能运行期间,车辆100的驾驶行为可能发生变化。例如,已经启动的制动过程可能自动被驾驶功能中断,例如以便使车辆100重新加速。这例如在UCC驾驶功能的范畴中可能在如下情况下发生:在具有红色信号组201的信号灯装置200处进行自动制动期间,信号组201切换为绿色。特别是当车辆100的驾驶员注意力不集中时,由驾驶功能引起的车辆100的驾驶行为的改变对于车辆100的驾驶员而言可能被感知为令人不安和/或不舒服。During the operation of driving functions, in particular driver assistance functions, the driving behavior of
控制单元101可以被配置为确定由车辆100的驾驶功能引起的车辆100的驾驶行为在特定的改变时间点已基本改变或者将基本改变。此外,控制单元101可以被配置为基于一个或多个驾驶员传感器108的驾驶员数据来确定车辆100的驾驶员在改变时间点对驾驶任务注意力不集中。作为其响应,则可使得向车辆100的驾驶员输出关于驾驶行为的改变的信息(例如通过视觉和/或听觉输出)。由此可以为车辆100的驾驶员提高舒适性。The
UCC驾驶功能通常被设计为根据SAE 2级的驾驶功能。在这样的驾驶功能、特别是这样的驾驶员辅助系统中,驾驶员仅在车辆100的(纵向)引导中获得辅助,并且必须能够随时继续自己行动。驾驶功能可以被设计为:使得在驾驶功能以驾驶员必须做出反应或者至少应当以更高的注意力监控车辆100的方式来改变车辆100的驾驶行为的情况下,输出关于驾驶行为的改变的信息。UCC driving functions are generally designed as driving functions according to SAE level 2. In such driving functions, in particular such driver assistance systems, the driver is only assisted in the (longitudinal) guidance of the
因此,控制单元101可以被设置为,如果驾驶功能显著改变其特性,例如中断制动并再次加速到自由行驶,则在视觉和/或听觉和/或触觉上向被识别为注意力不集中的驾驶员通知该改变。Thus, the
如果UCC驾驶功能自动制动到交通灯200,并且交通灯在调节期间从红色切换至绿色,则特别是当驾驶员通过车内摄像机108被识别为注意力集中时,控制单元101可以促使UCC驾驶系统中断制动并转变到自由行驶或跟随行驶(如果存在前方行驶的车辆)。如果驾驶员在这种情况下没有被识别为注意力集中,则可以例如通过铃声在听觉和/或视觉上提醒驾驶员注意变化的情况。然后,出于安全原因,即使绿灯亮起,也可以继续进行制动,直到驾驶员再次被识别为注意力集中。由此可以进一步提高驾驶功能的安全性。If the UCC driving function automatically brakes to a
UCC驾驶功能范畴中的另一示例是不可用性显示(NVA)。如果红色交通灯200被识别得太晚,以至于在考虑到驾驶功能的功能限制的情况下不再可能(自动)进行制动,则驾驶功能通常不会开始制动,而是取而代之向驾驶员发出不可用性显示。如果驾驶员在这种情况下没有自主制动,则可能会发生驶过红色交通灯200。出于该原因,可以(特别是同时)利用不可用性显示的输出来检验驾驶员的注意力(特别是通过车内摄像机108)。如果检测到驾驶员注意力不集中,则可以发出声音铃声,其使驾驶员注意到不会通过UCC驾驶功能进行制动,并且在某些情况下需要驾驶员做出反应。由此可以提高驾驶功能的安全性和舒适性。Another example in the category of UCC driving functions is non-availability display (NVA). If the
车辆100的控制单元101可以被配置为根据驾驶员数据、特别是根据所识别的驾驶员注意力程度来调整在驾驶功能范畴中、特别是在UCC驾驶功能范畴中自动引起的车辆100的减速和/或加速,特别是减速和/或加速的时间过程。由此可以提高驾驶功能的舒适性和安全性。The
通过监控驾驶员的注意力,使得可以将车辆100的制动过程设计为使得通过所产生的车辆运动向驾驶员提醒自动制动操纵的开始。由此可以使得车辆100的驾驶员以更高的可能性监控自动制动。例如,制动可以利用急冲开始,从而向(被识别为注意力不集中的)驾驶员发出触觉信号,其作为将注意力集中在驾驶任务上的提示。By monitoring the driver's attention, it is possible to design the braking process of the
替代地或附加地,车辆100的减速和/或加速的时间过程可以取决于所设置的驾驶模式(例如运动、舒适和/或节能)。例如,如果识别出车辆100的驾驶员注意力集中,则(例如在运动模式中)可以使得车辆100的减速在较晚的时间点开始和/或以增大的减速度值进行。由此可以提高驾驶功能的舒适性和安全性。Alternatively or additionally, the time course of deceleration and/or acceleration of
控制单元101可以被配置为(特别是基于环境数据和/或基于地图数据)(从不同类型的预定义集合中)确定信号单元200、210的类型。示例性类型是信号灯装置200或交通标志210。替代地或附加地,控制单元101可以被配置为(特别是基于环境数据和/或基于地图数据)预测关于车辆100可再次起步之前预期在前方信号单元200、210处必须停留的时间段的持续时间信息。由此,可以(基于地图数据和/或环境数据)确定与车辆100在前方信号单元200、210处的停止相关的停车信息。The
然后,车辆100在位于前方的信号单元200、210处的自动减速可以根据持续时间信息和/或根据信号单元200、210的类型(即根据停车信息)来实现。特别是可以根据持续时间信息和/或根据信号单元200、210的类型(即根据停车信息)来调整或指定减速的时间过程和/或减速过程的总持续时间。例如,在具有红色信号组201的信号灯装置200处可以选择相对较慢的减速过程(因为车辆100本来就必须等到信号组201变为绿色)。另一方面,可以在停车标志210处选择相对较快的减速过程,因为车辆100在停车后必要时可以立即继续行驶(如果交叉路径上的交通允许)。通过减速过程的调整可以提高驾驶功能的舒适性。An automatic deceleration of the
在UCC驾驶功能的范畴中,通常调节到车辆100静止。在此,如上所述,可以根据信号单元200、210的类型使用不同的减速过程。在此,特别是向交通灯200的自动制动可以不同于向停车标志210的自动制动(因为驾驶员可能在停车标志210处停车之后必要时立即继续行驶)。In the context of the UCC driving function, the
替代地或补充地,车辆100的驾驶风格、特别是减速度或减速特性可以由车辆100的用户通过驾驶体验开关来选择。应驾驶员的请求,驾驶功能可以通过驾驶体验开关(例如节能、舒适、运动等)在交通灯200和/或停车标志210处具有不同的减速过程。不同的减速过程可以通过调整车辆100的轨迹规划中的一个或多个参数来实现。Alternatively or additionally, the driving style of
通过使UCC驾驶功能的减速过程适配于信号单元200、210的类型,可以提高驾驶功能的舒适性和安全性。特别是可以避免对后续交通的妨碍,这例如可能在停车标志210前方减速过慢的情况下发生。By adapting the deceleration process of the UCC driving function to the type of signaling
在UCC驾驶功能的范畴中,车辆100的驾驶员可以通过用户界面107、特别是在屏幕400上显示在车辆100所行驶的道路上车辆100必须在该处停车的前方信号单元200、210。例如,红色交通灯或停车标志的符号可以显示在屏幕400上。替代地或附加地,可以产生关于所识别的信号单元200、210的听觉输出。然后可以自动地(aUCC)或在驾驶员确认(mUCC)之后实现车辆100的自动制动过程,直到在信号单元200、210处静止,特别是直到信号单元200、210的停止线。In the context of the UCC driving function, the driver of
控制单元101可以被配置为在车辆100位于信号单元200、210处期间(基于所检测的环境数据)监控信号单元200、210的与车辆100相关的信号组201的(信号)状态、特别是颜色。此外,控制单元101可以被配置为,当检测到信号组201从红色到绿色的相变时和/或当车辆100在信号单元200、210处静止时,则改变或者完全删除或撤回关于信号单元200、210的显示(和/或产生听觉输出)。因此,可以通过明确地方式向车辆100的驾驶员通知信号单元200、210不再与车辆100的纵向引导相关。显示的撤回可以在UCC驾驶功能的自动模式和/或手动模式下实现。The
此外,可以使得车辆100的驾驶员可通过用户界面107的操作元件413(例如通过恢复按钮)实现车辆100在信号单元200、210处的起步(特别是在识别出从红色到绿色的相变之后)。特别是可以使得驾驶员可通过操作元件413的操纵促使车辆100再次加速到设定速度或目标速度(在考虑所设置的与前方车辆的目标距离的情况下)。在UCC驾驶功能的自动模式和/或手动模式下可以通过(恢复)操作元件413的操纵使得可以在信号单元200、210处起步。In addition, it is possible for the driver of the
此外,可以通过操纵车辆100的加速踏板来实现在信号单元200、210处静止之后的起步。然而,这可能必要时会导致UCC驾驶功能的中断。由此,通过经由用户界面107的操作元件413(特别是经由按钮)进行起步,可以(在UCC驾驶功能的自动模式和/或手动模式下)使得在一系列依次连续的信号单元200、210处舒适地继续执行UCC驾驶功能。Furthermore, a start-off after a standstill at the
UCC驾驶功能特别是可以被设计为使得在(必要时手动确认的)交通灯200处(mUCC)在静止之后且在识别出变为绿色之后撤回关于交通灯200的显示。此外,可以使得驾驶员可通过按钮413进行起步。由此可以提高UCC驾驶功能的舒适性。此外,由此可以实现ACC驾驶功能的一致的行为(在没有前方车辆的静止情况下)。控制单元101可以被配置为使得在(必要时手动确认的)交通灯200处从识别出相变为绿色开始激活计时器,通过其促使从车辆100的静止开始移除关于交通灯200的红色显示。In particular, the UCC driving function can be designed such that at traffic light 200 (possibly manually confirmed) (mUCC) the display for
车辆100的控制单元101可以被配置为,当识别出车辆100位于信号单元200、210处的第一排时,响应于用户界面107的操作元件411、412、413的操纵而阻止或抑制车辆100在信号单元200、210处的起步。换言之,必要时仅当至少一个其他前方车辆100在信号单元200、210处位于车辆100的前方时,才可以使得通过用户界面107的操作元件411、412、413的操纵进行起步。由此可以提高UCC驾驶功能的安全性。特别是可以由此以可靠地方式防止车辆100的驾驶员由于用户界面107的操作元件411、412、413(特别是摇杆411和/或按钮412、413)的无意识操纵而引起在(可能为红色的)交通灯200处的起步。The
由此,通过驾驶员例如经由摇杆411调节设定速度或利用设置按钮412确认限速建议,能够可靠地防止驾驶员在红色交通灯200处静止时无意识地引发起步。此外,可以防止驾驶员的按钮操纵导致车辆100再次起步并加速到设定速度。这特别是可以通过以下方式实现:只要车辆100位于停车相关的交通灯200前面的第一排,则由于操作元件411、412、413的驾驶员确认而从状态“车辆静止”到状态“起步”的转变是不可能或被禁止的。由此,操作元件411、412、413的操纵是无效的。In this way, the driver can be reliably prevented from inadvertently initiating a drive-off when stationary at the
车辆100的控制单元101可以被配置为基于环境数据和/或基于位置数据(与地图数据相关)来确定车辆100是否位于信号单元200、210处的第一排。特别是可以确定车辆100到信号单元200、210的停车点或停止线的距离。然后,基于所确定的距离可以确定车辆100是否位于第一排。The
可能发生的是,基于车辆100的一个或多个环境传感器103的环境数据无法或无法可靠地识别信号单元200、210的状态,特别是信号单元200、210的信号组201的颜色。这可能导致UCC驾驶功能的可用性降低。It can happen that the state of signaling
控制单元101可以被设置为基于环境数据检测(紧邻)在车辆100前方行驶的前车。然后,可以基于前车的驾驶行为在信号单元200、210处执行或提供UCC驾驶功能、特别是车辆100的自动纵向引导。通过在UCC驾驶功能的运行中考虑前车的驾驶行为,可以提高驾驶功能的可用性以及舒适性。The
例如,在UCC驾驶功能的运行期间,可能会发生由于遮蔽或不良照明条件而无法充分识别交通灯200的颜色。此外,在复杂的十字路口几何形状(具有不同的信号组201)下可能无法将不同的信号组201分配给各个行驶方向。为了提高纵向调节功能的自动化程度,从而提高驾驶员的舒适性,除了来自地图数据的交通灯颜色和/或信号单元200、210的属性之外,必要时还可以评估前方车辆的行为并将其考虑到驾驶功能运行的范畴中。For example, during operation of the UCC driving function, it may happen that the color of the
例如,如果前车驶过位于前方的交通灯200(其潜在地可能为绿色),则必要时可能会跟随前车。特别是只要基于环境数据识别出潜在相关的绿色交通灯,则必要时可能取消自动制动。换言之,控制单元101可以被配置为基于环境数据来识别位于前方的信号灯装置或交通灯200的信号组201中的至少一个具有绿色。如果是这种情况,并且如果(基于环境数据)识别出(紧邻)在车辆100前方行驶的前车正在驶过信号灯装置200,则可使得车辆100也驶过信号灯装置200(即使基于环境数据和地图数据无法清楚地确定具有绿色的信号组201是否与车辆100的行驶方向相关)。通过对前车驾驶行为的这种考虑,可以安全地提高驾驶功能的可用性。For example, if a vehicle in front passes a
替代地或附加地,控制单元101可以被配置为在车辆100静止时在失去交通灯200视野的情况下以及在前方车辆起步的情况下,假设交通灯200已从红色切换为绿色(或在所需的交通灯处是关闭的)。然后必要时可以实现车辆100的自动起步过程。换言之,控制单元101可以被设置为识别出(紧邻)在车辆100前方位于信号单元200、210处的前车正在起步。然后,即使在没有识别信号单元200、210的(信号)状态的情况下,也可以实现车辆100的自动起步(必要时仅在车辆100的驾驶员对操作元件411、412、413进行操纵之后)。因此可以安全地提高UCC驾驶功能的可用性。Alternatively or additionally, the
车辆100的驾驶员通常可以通过操纵加速踏板和/或制动踏板来超控UCC驾驶功能的自动纵向引导。所识别的加速踏板和/或制动踏板的操纵必要时也可以用于终止UCC驾驶功能。然而,响应于所识别的车辆100的加速踏板和/或制动踏板的操纵而自动终止UCC驾驶功能可能会导致UCC驾驶系统的舒适性和/或安全性降低。A driver of the
例如,可能发生的是,车辆100在信号单元200、210处的、特别是在信号单元200、210的停止线处的停车位置被车辆100的驾驶员感觉为在信号单元200、210之前太远(特别是如果车辆100位于停止线前的第一排从而没有前方车辆)。在这种情况下,驾驶员可能倾向于通过操纵加速踏板将车辆100行驶到更靠近停止线的位置,但这可能导致UCC驾驶功能的中断和/或从而可能抑制驾驶功能范畴中的自动起步。For example, it can happen that the parking position of the
在另一示例中,车辆100的驾驶员可能倾向于在交通灯200之前从第一车道上的静止切换到相邻车道(例如以便减小到停止线的距离)。为此目的,驾驶员将操纵加速踏板,以便将车辆100驶入相邻车道。这可能导致UCC驾驶功能的终止,从而导致在交通灯200处的后续起步中缺少纵向引导辅助。In another example, a driver of
此外可能发生的是,如果驾驶员在识别出信号单元200、210的时间点操纵加速踏板(从而终止UCC驾驶功能的辅助),则在车辆100的自动纵向引导中将不考虑(并且必要时在没有自动制动的情况下驶过)由UCC驾驶功能识别的信号单元200、210。Furthermore, it can happen that if the driver actuates the accelerator pedal at the point in time when the
另一方面,对于车辆100的驾驶员可以以可靠且舒适的方式(特别是通过操纵加速踏板)例如在驾驶功能的误制动的情况下超控UCC驾驶功能。On the other hand, it is possible for the driver of
控制单元101可以被配置为确定关于加速踏板的偏转、特别是关于偏转程度的偏转信息。偏转信息可以例如基于车辆100的加速踏板传感器来确定。替代地或附加地,控制单元101可以被设置为确定与加速踏板的操纵持续时间相关的时间信息。然后可以基于偏转信息和/或基于时间信息来确定是否在信号单元200、210处提供车辆100的自动纵向引导的辅助,和/或是否终止驾驶功能。The
控制单元101特别是可以被配置为基于偏转信息来确定加速踏板的偏转是大于还是小于偏转阈值(例如加速踏板的最大可能偏转的25%)。此外,控制单元101可以被配置为基于时间信息来确定加速踏板偏转的持续时间大于还是小于时间阈值(例如4秒)。The
控制单元101可以被配置为,如果确定:The
·加速踏板的偏转小于或等于偏转阈值;并且the deflection of the accelerator pedal is less than or equal to the deflection threshold; and
·加速踏板的操纵持续时间小于或等于时间阈值,the accelerator pedal is operated for a duration less than or equal to the time threshold,
则允许在不终止UCC驾驶功能的情况下操纵加速踏板。Operation of the accelerator pedal is then permitted without terminating the UCC driving function.
另一方面,如果确定:On the other hand, if it is determined that:
·加速踏板的偏转大于偏转阈值;或The deflection of the accelerator pedal is greater than the deflection threshold; or
·加速踏板的操纵持续时间大于时间阈值,the duration of the accelerator pedal actuation is greater than the time threshold,
则可以使得退出或终止UCC驾驶功能。Then the UCC driving function can be exited or terminated.
在此,退出或中断必要时可以仅涉及在操纵加速踏板之后的下一信号单元200、210。由此,必要时可以使得仅临时退出或临时终止UCC驾驶功能(仅对于紧跟在操纵加速踏板之后的信号单元200、210)。In this case, an exit or an interruption may only concern the
由此可以提高UCC驾驶功能的舒适性和/或安全性。因此,特别是可以使得车辆100的驾驶员可通过(轻微)操纵加速踏板而使车辆100行驶到更靠近停止线的位置和/或信号单元200、210之前的相邻车道上(而不会在此终止UCC驾驶功能的自动辅助,例如用于车辆100的后续起步)。此外,由此可以实现的是,即使驾驶员短暂且相对较轻地操纵加速踏板(在识别出信号单元200、210期间),也会在车辆100的自动纵向引导中考虑所识别的信号单元200、210。此外,由此可以实现对UCC驾驶功能干预的舒适且安全的超控。As a result, the comfort and/or safety of the UCC driving function can be increased. Thus, in particular it is possible for the driver of the
由此,驾驶功能可以被设计为使得(仅)当超过特定加速踏板角度时,实现驾驶功能的立即退出。此外,当超过加速踏板操纵的特定时间阈值时(即使没有超过偏转阈值),也可以实现驾驶功能的退出。另一方面,驾驶员可以使用达到时间阈值之前的时间来试探靠近十字路口的停止线。Thereby, the driving function can be designed such that (only) when a certain accelerator pedal angle is exceeded, an immediate exit of the driving function is effected. Furthermore, a deactivation of the driving function is also possible when a certain time threshold of the accelerator pedal actuation is exceeded, even if the deflection threshold is not exceeded. On the other hand, the driver can use the time until the time threshold is reached to test the stop line approaching the intersection.
此外,驾驶功能可以被设计为使得当在踩下加速踏板期间识别出交通灯200时,不会退出驾驶功能。因此可以通过可靠的方式防止无反应地驶过交通灯200。Furthermore, the driving function can be designed such that the driving function is not deactivated when a
在静止在红色交通灯200处的情况下,可能发生的是,驾驶员在交通灯200切换到绿色时通过操纵加速踏板来起步,因为UCC驾驶功能尚未识别出切换到绿色(例如由于延迟和/或由于未识别颜色切换)。加速踏板的操纵可能会导致UCC驾驶功能中断(并且导致与之相关的接管请求(TOR)的输出)。这可能被车辆100的驾驶员感知为干扰。When standing still at a
控制单元101可以被配置为在由车辆100的驾驶员通过操纵加速踏板而引起的起步过程中确定关于车辆100的行驶速度的速度数据。此外,控制单元101可以被配置为,只要由加速踏板的操纵引起的行驶速度尚未超过预定的速度阈值,就从驾驶员接管自动纵向引导。由此,TOR的输出和/或UCC驾驶功能的终止可以被抑制和/或防止,直到达到速度阈值(并且可实现驾驶功能对纵向引导的接管)。另一方面,如果(特别是只要)达到或超过速度阈值(例如10km/h),则可以实现TOR的输出和/或UCC驾驶功能的中断。因此可以为车辆100的驾驶员进一步提高舒适性。The
控制单元101可以被配置为从车辆100运行的多个不同驾驶模式中确定一个驾驶模式。示例性的驾驶模式包括:The
·运动驾驶模式,其中车辆100具有相对较高的驾驶动态性,具有相对较高的加速度值和/或减速度值;a sporty driving mode, in which the
·舒适驾驶模式,其中车辆100驾驶起来特别舒适,具有相对较低的加速度值和/或减速度值;和/或a comfortable driving mode, in which the
·节能驾驶模式,其中车辆100具有特别节能的驾驶方式。• An eco-driving mode, in which the
驾驶模式可以例如由车辆100的用户通过用户界面107、例如通过用户界面107的一个或多个操作元件来调节。The driving mode can be set, for example, by a user of
此外,控制单元101还可以被配置为根据所设置的驾驶模式来运行UCC驾驶功能。特别是可以根据驾驶模式来调整车辆100的关于前方信号单元200、210的驾驶行为,例如减速行为。例如,可以根据驾驶模式调整车辆100开始减速到所识别的信号单元200、210(车辆100应当在该处停车)的时间点。在节能驾驶模式中,例如可以实现车辆100的特别提早的反应,而在舒适驾驶模式中在较晚之后才启动反应,并且在运动驾驶模式中甚至更晚才启动反应。In addition, the
替代地或附加地,可以根据所设置的驾驶模式来调整车辆100对所识别的待考虑的信号单元200、210的反应类型或方式。示例性的反应类型或方式包括:Alternatively or additionally, the type or manner of reaction of
·车辆100的滑行运行,其中车辆100的车轮与车辆100的驱动引擎分离。必要时驱动引擎可以被停用;• Coasting operation of the
·车辆100的拖曳运行,其中车辆100的车轮牵引驱动引擎,这导致车辆100的拖曳减速;和/或- towing operation of the
·主动(摩擦和/或回收)制动运行,其中制动转矩(例如通过摩擦制动器和/或通过电机)被主动施加到车辆100的一个或多个车轮上。• Active (friction and/or regenerative) braking operation, in which braking torque is actively applied to one or more wheels of the vehicle 100 (eg via friction brakes and/or via an electric motor).
在节能驾驶模式中,例如在接近信号单元200、210时,可以首先转变到滑行运行,然后到拖曳运行,最后到制动运行。在舒适驾驶模式下,必要时可以省去滑行运行并且直接启动拖曳运行以及随后的制动运行。在运动驾驶模式下,必要时可以省去滑行运行和拖曳运行,并且直接启动制动运行。In an eco-driving mode, for example when approaching the
因此,车辆100在接近信号单元200、210时的减速行为可以适配于所设置的驾驶模式。由此可以进一步提高车辆100的舒适性。Thus, the deceleration behavior of the
由此,控制单元101可以被配置为根据所设置的驾驶模式来改变响应于交通灯的(输出)时间点。在节能驾驶模式下,可以相对提早地开始进行交通灯调节,例如按照如下运行顺序:滑行运行、拖曳运行和制动运行。在舒适驾驶模式中,可以选择交通灯调节的中等开始时间点,例如按照拖曳运行和制动运行的运行顺序。在运动驾驶模式中,可以相对较晚地开始进行交通灯调节,例如直接使用制动运行。Thus, the
通过适配于驾驶模式可以使(特别是车辆100的减速过程的)交通灯调节特别舒适。此外,前瞻性的驾驶方式可以通过“提早收油门”来体现,这尤其会提前降低到静止目标物体的动力性。由此,可以实现车辆100的驾驶员的舒适性和安全性增益。根据驾驶模式(例如节能、舒适和运动),可以调节分别适配于驾驶模式的(驾驶和/或减速)特性。因此可以使得在ACC功能和UCC驾驶功能之间可以实现特别和谐的交互。Traffic light control (in particular during deceleration of vehicle 100 ) can be made particularly comfortable by adaptation to the driving mode. In addition, a proactive driving style can be manifested by "early throttle reduction", which in particular reduces the dynamics to stationary target objects earlier. Thereby, comfort and safety gains for the driver of the
在下文中,借助于多个方法来描述在本文中描述的车辆引导系统101的不同方面。应指出的是,不同方法的不同特征可以彼此以任意方式组合。In the following, different aspects of the
图5a示出了用于提供用于车辆100的自动纵向引导的驾驶功能(特别是UCC驾驶功能)的(必要时计算机实现的)示例性方法500的流程图。FIG. 5 a shows a flowchart of an exemplary (possibly computer-implemented)
方法500包括:在驾驶功能的运行期间,确定501关于在车辆100的行驶方向上位于前方的第一信号单元200、210的数据。特别是可以确定车辆100的一个或多个环境传感器103的环境数据和/或关于车辆100所行驶的车道网络的地图数据作为数据。
此外,方法500包括:根据关于第一信号单元200、210的数据,在第一信号单元200、210处以自动模式或手动模式运行502驾驶功能。在此,在车辆100的自动纵向引导中,在自动模式下必要时可以自动地考虑第一信号单元200、210,并且在手动模式下必要时仅在由车辆100的用户确认之后才考虑第一信号单元200、210。Furthermore, the
例如,如果基于数据可以清楚地确定信号单元200、210与车辆100的行驶方向相关的信号组201的颜色,则可以以自动模式运行驾驶功能。如果无法清楚地确定相关信号组201的颜色,则必要时可以使用手动模式。由此,可以根据信号单元200、210的可用数据灵活地使用驾驶功能的自动模式或手动模式。通过在自动模式和手动模式之间的灵活切换,可以提高驾驶功能的可用性以及舒适性。For example, if the color of the
图5b示出了用于提供用于车辆100在信号单元200、210处的自动纵向引导的驾驶功能(特别是UCC驾驶功能)的(必要时计算机实现的)示例性方法510的流程图。FIG. 5 b shows a flow chart of an exemplary (possibly computer-implemented)
方法510包括:在驾驶功能的运行期间,检测511在车辆100的配置时间点或配置位置处由车辆100的用户引起驾驶功能的特性的配置更改(例如从自动模式到手动模式的切换或者驾驶功能的停用)。The
此外,方法510还包括:确定512在配置时间点或配置位置处在车辆100的自动纵向引导中已经考虑了在车辆100行驶方向上位于前方的第一信号单元200、210。此外,方法510还包括:在车辆100的自动纵向引导中,仅在第一信号单元200、210之后的信号单元200和210处和/或仅在第一信号单元200、210处的车辆100自动纵向引导结束或完成之后(例如仅在车辆100在第一信号单元200、210处制动到静止之后),才考虑513配置更改。在此,对于第一信号单元200、210的自动纵向引导可以继续在不考虑配置更改的情况下实现。由此可以使得能够特别安全地运行驾驶功能。Furthermore,
图5c示出了用于提供用于车辆100在信号单元200、210处的自动纵向引导的驾驶功能(特别是UCC驾驶功能)的(必要时计算机实现的)示例性方法520的流程图。FIG. 5 c shows a flowchart of an exemplary (possibly computer-implemented)
方法520包括:在驾驶功能的运行期间,确定521关于在车辆100的行驶方向上位于车辆100前方的环境的环境数据。在此,环境数据可以由车辆100的一个或多个环境传感器103检测。此外,方法520还包括:基于环境数据来检测522在车辆100所行驶的车道上沿行驶方向位于车辆100前方的第一信号单元200、210。
此外,方法520还包括:确定523基于环境数据所检测的第一信号单元200、210与关于车辆100所行驶的车道网络的地图数据之间的矛盾。例如,可以识别出基于环境数据所识别的第一信号单元200、210具有与地图数据中所记录的不同(特别是更多)数量的不同信号组201。Furthermore, the
此外,方法520包括:响应于所识别的矛盾来产生524向车辆100的用户的不可用性输出、特别是NVA,以通知用户在用于车辆100的自动纵向引导的驾驶功能中不考虑基于环境数据所检测的第一信号单元200、210。由此可以进一步提高驾驶功能的安全性。Furthermore,
图5d示出了用于提供用于车辆100在信号单元200、210处的自动纵向引导的驾驶功能(特别是UCC驾驶功能)的(必要时计算机实现的)示例性方法530的流程图。FIG. 5 d shows a flowchart of an exemplary (possibly computer-implemented)
方法530包括:在驾驶功能的运行期间,确定531关于在车辆100的行驶方向上位于车辆100前方的环境的环境数据。此外,方法530包括:基于环境数据来检测532在车辆100所行驶的车道上沿行驶方向位于车辆100前方的第一信号单元200、210。
此外,方法530还包括:确定533关于车辆100到第一信号单元200、210的时间距离和/或空间距离311的距离信息。此外,方法530包括:根据距离信息,促使或抑制534输出关于第一信号单元200、210的信息。特别是,如果车辆100仍然离第一信号单元200、210太远,则可以抑制输出(特别是提供在第一信号单元200、210处的自动纵向引导的建议)。替代地或附加地,如果车辆100已经太靠近第一信号单元200、210,则可以抑制输出(特别是不可用性输出)。由此可以提高输出的相关性,从而可以提高驾驶功能的舒适性。Furthermore, the
图5e示出了用于提供用于车辆100在信号单元200、210处的自动纵向引导的驾驶功能(特别是UCC驾驶功能)的(必要时计算机实现的)示例性方法540的流程图。FIG. 5 e shows a flowchart of an exemplary (possibly computer-implemented)
方法540包括:在驾驶功能的运行期间,确定541车辆100在第一信号单元200、210处执行起步过程。此外,方法540包括:基于车辆100的一个或多个环境传感器103的环境数据来检测542在第一信号单元200、210之后的第二信号单元200、210,其在车辆100所行驶的车道上沿行驶方向位于车辆100的前方。
此外,方法540包括:检验543是否满足关于起步过程的一个或多个起步过程条件(例如关于车辆100的行驶速度和/或关于车辆100与第一信号单元200、210的时间距离或空间距离的一个或多个起步过程条件)。Furthermore, the
此外,方法540还包括:根据是否满足一个或多个起步过程条件,在车辆100的自动纵向引导中考虑544第二信号单元200、210。在此,特别是可以忽略在时间或空间上紧邻第一信号单元200、210所识别的第二信号单元200、210。由此可以提高驾驶功能的可靠性和舒适性(例如因为避免了误识别的信号单元200、210的输出)。Furthermore,
图5f示出了用于提供用于车辆100在信号单元200、210处的自动纵向引导的驾驶功能(特别是UCC驾驶功能)的(必要时计算机实现的)示例性方法550的流程图。FIG. 5 f shows a flow chart of an exemplary (possibly computer-implemented)
方法550包括:在驾驶功能的运行期间,基于车辆100的一个或多个环境传感器103的环境数据,检测551在车辆100所行驶的车道上沿行驶方向位于车辆100前方的第一信号单元200、210。此外,方法550包括:确定552关于车辆100的驾驶员在监控驾驶功能时的注意力的驾驶员数据。此外,方法550还包括:根据驾驶员数据,在第一信号单元200、210处运行553关于车辆100的自动纵向引导的驾驶功能。特别是可以根据驾驶员数据以自动模式或手动模式运行驾驶功能。由此可以提高驾驶功能的安全性和/或舒适性。The
图5g示出了用于提供用于车辆100在信号单元200、210处的自动纵向引导的驾驶功能(特别是UCC驾驶功能)的(必要时计算机实现的)示例性方法560的流程图。FIG. 5 g shows a flowchart of an exemplary (possibly computer-implemented)
方法560包括:在驾驶功能的运行期间,检测561在车辆100所行驶的车道上沿行驶方向位于车辆100前方的第一信号单元200、210。此外,方法560包括:确定562关于车辆100在第一信号单元200、210处的预期停车持续时间和/或关于第一信号单元200、210的类型(以及与之相关的预期停车持续时间)的停车信息。
此外,方法560包括:根据停车信息,促使563车辆100在第一信号单元200、210处自动减速。特别是可以根据停车信息来调整减速的时间过程。由此可以提高驾驶功能的舒适性和/或安全性。Furthermore, the
图5h示出了用于提供用于车辆100在信号单元200、210处的自动纵向引导的驾驶功能(特别是UCC驾驶功能)的(必要时计算机实现的)示例性方法570的流程图。方法570包括:在驾驶功能的运行期间,确定571车辆100处于信号单元200、210处(特别是在红色交通灯处)。此外,方法570包括:识别572车辆100的驾驶员操纵车辆100的用户界面107的操作元件411、412、413(特别是按钮或摇杆)来控制驾驶功能。此外,方法570还包括:响应于所识别的对操作元件411、412、413的操纵而促使573车辆100自动起步。由此可以使得能够在信号单元200、210处舒适且安全地起步。FIG. 5 h shows a flowchart of an exemplary (possibly computer-implemented)
图5i示出了用于提供用于车辆100在信号单元200、210处的自动纵向引导的驾驶功能(特别是UCC驾驶功能)的(必要时计算机实现的)示例性方法580的流程图。FIG. 5 i shows a flow chart of an exemplary (possibly computer-implemented)
方法580包括:在驾驶功能的运行期间,基于与(必要时紧邻)在车辆100前方行驶的前车相关的环境数据,确定581前车正在驶过与信号单元200、210相关联的交通路口(特别是十字路口)。在此,前车可以位于与车辆100相同的车道上。The
此外,方法580还包括:响应于所识别的前车的行驶,即使无法清楚地确定信号单元200、210的关于是否允许驶过交通路口的状态(特别是相关信号组201的颜色),也促使582车辆100自动跟随前车驶过交通路口。通过考虑前车的行为,可以提高驾驶功能的可用性以及舒适性。In addition, the
图5j示出了用于提供用于车辆100在信号单元200、210处的自动纵向引导的驾驶功能(特别是UCC驾驶功能)的(必要时计算机实现的)示例性方法590的流程图。FIG. 5 j shows a flow chart of an exemplary (possibly computer-implemented)
方法590包括:在驾驶功能的运行期间,检测591车辆100的加速踏板被操纵。此外,方法590还包括:确定592与加速踏板的操纵相关和/或与由加速踏板的操纵引起的车辆100的反应相关的操纵信息。此外,方法590还包括:根据操纵信息来适配593、特别是继续执行或中断驾驶功能的运行。在此,特别是可以通过(对于每个信号单元200、210)以选择性的方式操纵加速踏板,使得在车辆100的自动纵向引导中不考虑所识别的位于前方的信号单元200、210(从而车辆100利用距离和/或速度调节、特别是利用ACC驾驶功能被引导通过所识别的信号单元200、210)。通过考虑操纵信息,可以安全地提高驾驶功能的可用性和舒适性。由此,特别是可以(以每个信号单元200、210的选择性方式)实现驾驶功能的舒适性超控。
图6示出了用于提供用于车辆100在信号单元200、210处的自动纵向引导的驾驶功能的(必要时计算机实现的)另一示例性方法600的流程图。方法600包括:在驾驶功能的运行期间,检测601在车辆100所行驶的车道上沿行驶方向位于车辆100前方的第一信号单元200、210。例如可以基于环境数据和/或基于地图数据来检测信号单元200、210。FIG. 6 shows a flowchart of a further exemplary method 600 (possibly computer-implemented) for providing a driving function for automatic longitudinal guidance of
此外,方法600包括:从车辆100的多个不同驾驶模式中确定602所设置的驾驶模式。在此,驾驶模式可以由车辆的用户、特别是驾驶员设置(例如通过车辆的操作元件)。该多个驾驶模式例如可以包括节能驾驶模式、舒适驾驶模式和/或运动驾驶模式。不同的驾驶模式可以被设计为实现车辆的不同行驶动态性。在此,节能驾驶模式下的驾驶动态性可以低于舒适驾驶模式,并且舒适驾驶模式下的行驶动态性可以低于运动驾驶模式。Furthermore,
此外,方法600还包括:在车辆100接近第一信号单元200、210时、特别是在第一信号单元200、210处的减速过程中,根据所设置的驾驶模式实现603车辆100的自动纵向引导。通过在UCC驾驶功能的运行中考虑所设置的驾驶模式,可以提高驾驶功能的安全性和舒适性。In addition, the
在本文中描述了城市巡航控制(UCC)驾驶功能的不同方面,通过其在考虑信号单元200、210的情况下提供了舒适且安全的自动纵向引导(根据SAE 2级)。Different aspects of the urban cruise control (UCC) driving function are described here, by which comfortable and safe automatic longitudinal guidance (according to SAE level 2) is provided taking into account the signaling
本发明并不局限于所示的实施例。特别是应注意,说明书和附图仅旨在说明所提出的方法、装置和系统的原理。The invention is not limited to the shown exemplary embodiments. In particular, it should be noted that the description and drawings are only intended to illustrate the principles of the proposed methods, devices and systems.
Claims (14)
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102020126670.7 | 2020-10-12 | ||
| DE102020126670.7ADE102020126670A1 (en) | 2020-10-12 | 2020-10-12 | Vehicle guidance system and method for operating a driving function in different modes |
| PCT/EP2021/077593WO2022078855A1 (en) | 2020-10-12 | 2021-10-06 | Vehicle guidance system and method for operating a driving function in different modes |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN116323356Atrue CN116323356A (en) | 2023-06-23 |
Family
ID=78087357
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202180069309.4APendingCN116323356A (en) | 2020-10-12 | 2021-10-06 | Vehicle guidance system and method for operating a driving function in different modes |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20230382420A1 (en) |
| EP (2) | EP4225624B1 (en) |
| JP (1) | JP2023544204A (en) |
| KR (1) | KR20230054459A (en) |
| CN (1) | CN116323356A (en) |
| DE (1) | DE102020126670A1 (en) |
| WO (1) | WO2022078855A1 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022128566A1 (en)* | 2022-10-27 | 2024-05-02 | Bayerische Motoren Werke Aktiengesellschaft | Method and device for operating a driving function when approaching a signaling unit |
| DE102024101467A1 (en)* | 2024-01-18 | 2025-07-24 | Bayerische Motoren Werke Aktiengesellschaft | Method and device for route-based longitudinal guidance of a vehicle at a traffic junction |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1772339A1 (en)* | 2005-10-05 | 2007-04-11 | Bayerische Motoren Werke Aktiengesellschaft | Procedure to relieve the driver of a motor vehicle |
| US20130253754A1 (en)* | 2012-03-26 | 2013-09-26 | Google Inc. | Robust Method for Detecting Traffic Signals and their Associated States |
| CN109476313A (en)* | 2016-07-08 | 2019-03-15 | 奥迪股份公司 | The method and motor vehicle of the driver assistance system of auxiliary are provided for driver in taxiing procedures for running in motor vehicle |
| WO2019159214A1 (en)* | 2018-02-13 | 2019-08-22 | 本田技研工業株式会社 | Vehicle control device and vehicle control method |
| CN111699122A (en)* | 2018-03-07 | 2020-09-22 | 宝马汽车股份有限公司 | Control unit and method for operating a driving function at a signaling device |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3514032B1 (en)* | 2013-12-04 | 2024-02-07 | Mobileye Vision Technologies Ltd. | Adjusting velocity of a vehicle for a curve |
| DE102015204122A1 (en) | 2014-05-12 | 2015-11-12 | Volkswagen Aktiengesellschaft | Traffic light assistance system for a vehicle with a display device |
| EP3426521A4 (en)* | 2016-03-06 | 2019-11-20 | Foresight Automotive Ltd. | VEHICLE ALERT SYSTEM AND METHOD IN PROGRESS |
| US20180273047A1 (en)* | 2017-03-27 | 2018-09-27 | Ford Global Technologies, Llc | Vehicle propulsion operation |
| DE102017208646A1 (en)* | 2017-05-22 | 2018-11-22 | Audi Ag | Method for operating a motor vehicle and a motor vehicle |
| US10000065B1 (en)* | 2017-06-15 | 2018-06-19 | The Boeing Company | Inkjet printing system having dynamically controlled ink reservoir |
| JP2019079398A (en)* | 2017-10-26 | 2019-05-23 | トヨタ自動車株式会社 | Cruise controller |
| DE102018205753A1 (en) | 2018-04-16 | 2019-10-17 | Bayerische Motoren Werke Aktiengesellschaft | Method, device and means of transport for an automated approach of a means of locomotion to a traffic signal system |
| EP3960576B1 (en)* | 2019-04-24 | 2024-12-11 | Walter Steven Rosenbaum | Method and system for analysing the control of a vehicle |
| JP7136054B2 (en)* | 2019-08-29 | 2022-09-13 | トヨタ自動車株式会社 | vehicle control system |
| CN114730520B (en)* | 2019-11-12 | 2023-07-04 | 日产自动车株式会社 | Semaphore recognition method and semaphore recognition device |
- 2020
- 2020-10-12DEDE102020126670.7Apatent/DE102020126670A1/enactivePending
- 2021
- 2021-10-06JPJP2023521112Apatent/JP2023544204A/enactivePending
- 2021-10-06WOPCT/EP2021/077593patent/WO2022078855A1/ennot_activeCeased
- 2021-10-06CNCN202180069309.4Apatent/CN116323356A/enactivePending
- 2021-10-06EPEP21790416.8Apatent/EP4225624B1/enactiveActive
- 2021-10-06KRKR1020237010136Apatent/KR20230054459A/ennot_activeCeased
- 2021-10-06USUS18/031,180patent/US20230382420A1/enactivePending
- 2021-10-06EPEP23216208.1Apatent/EP4316939A3/enactivePending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1772339A1 (en)* | 2005-10-05 | 2007-04-11 | Bayerische Motoren Werke Aktiengesellschaft | Procedure to relieve the driver of a motor vehicle |
| US20130253754A1 (en)* | 2012-03-26 | 2013-09-26 | Google Inc. | Robust Method for Detecting Traffic Signals and their Associated States |
| CN109476313A (en)* | 2016-07-08 | 2019-03-15 | 奥迪股份公司 | The method and motor vehicle of the driver assistance system of auxiliary are provided for driver in taxiing procedures for running in motor vehicle |
| WO2019159214A1 (en)* | 2018-02-13 | 2019-08-22 | 本田技研工業株式会社 | Vehicle control device and vehicle control method |
| CN111699122A (en)* | 2018-03-07 | 2020-09-22 | 宝马汽车股份有限公司 | Control unit and method for operating a driving function at a signaling device |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230382420A1 (en) | 2023-11-30 |
| WO2022078855A1 (en) | 2022-04-21 |
| EP4225624B1 (en) | 2025-07-02 |
| EP4225624A1 (en) | 2023-08-16 |
| KR20230054459A (en) | 2023-04-24 |
| EP4316939A2 (en) | 2024-02-07 |
| EP4316939A3 (en) | 2024-03-13 |
| JP2023544204A (en) | 2023-10-20 |
| DE102020126670A1 (en) | 2022-04-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN116507537A (en) | Vehicle guidance system and method for operating driving functions based on driver data | |
| US20230382377A1 (en) | Vehicle Guidance System and Method for Operating a Driving Function Depending on the Expected Stopping Duration | |
| CN116390877A (en) | Vehicle Guidance System and Method for Operating Driving Functions While Accelerator Pedal is Manipulated | |
| US20230382417A1 (en) | Vehicle Control System and Method for Outputting Information Related to a Signaling Unit | |
| US12415517B2 (en) | Vehicle guidance system and method for automated starting of a vehicle | |
| US20230391331A1 (en) | Vehicle Guidance System and Method for Operating a Travel Function on the Basis of the Distance from a Signaling Unit | |
| US20230373488A1 (en) | Vehicle Control System and Method for Operating a Driving Function Taking into Account the Distance from the Stop Line | |
| US20230373517A1 (en) | Vehicle Guidance System and Method for Operating a Driving Function in the Presence of a Contradiction With Map Data | |
| US20230406314A1 (en) | Vehicle Control System and Method for Taking into Account Environmental Data during Operation of a Driving Function | |
| CN116323356A (en) | Vehicle guidance system and method for operating a driving function in different modes | |
| US20190265727A1 (en) | Vehicle control device | |
| CN116323362A (en) | Vehicle guidance system and method for operating driving functions after a take-off procedure | |
| CN119183428A (en) | Method and device for automatically starting a vehicle at a signal unit | |
| US20230373487A1 (en) | Vehicle Control System and Method for Operating a Driving Function in Different Driving Modes | |
| CN116348351A (en) | Vehicle guidance system and method for increasing driver's attention while operating a driving function | |
| CN116324908A (en) | Device and method for detecting a bypass lane | |
| US20230382373A1 (en) | Vehicle Control System and Method for Operating a Driving Function in the Event of a Change in Configuration | |
| US20230382386A1 (en) | Vehicle Control System and Method for Operating a Driving Function According to a Preceding Vehicle | |
| CN116420178A (en) | Device and method for controlling a driving function of automatic longitudinal and/or lateral guidance of a vehicle | |
| DE102020126684A1 (en) | Vehicle guidance system and method for operating a driving function on a signaling unit | |
| CN116508074A (en) | Apparatus and method for identifying uncorrelated signal generators |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |