CN116320355A - Scattering imaging system and scattering imaging method - Google Patents
Scattering imaging system and scattering imaging methodDownload PDFInfo
- Publication number
- CN116320355A CN116320355ACN202310290600.5ACN202310290600ACN116320355ACN 116320355 ACN116320355 ACN 116320355ACN 202310290600 ACN202310290600 ACN 202310290600ACN 116320355 ACN116320355 ACN 116320355A
- Authority
- CN
- China
- Prior art keywords
- speckle
- target object
- fingerprint
- pattern
- speckle pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/48—Laser speckle optics
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
- G06T3/4084—Scaling of whole images or parts thereof, e.g. expanding or contracting in the transform domain, e.g. fast Fourier transform [FFT] domain scaling
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/593—Depth or shape recovery from multiple images from stereo images
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/156—Mixing image signals
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/271—Image signal generators wherein the generated image signals comprise depth maps or disparity maps
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20112—Image segmentation details
- G06T2207/20132—Image cropping
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Optics & Photonics (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于光学成像技术领域,具体地讲,涉及一种散射成像系统和散射成像方法。The invention belongs to the technical field of optical imaging, and in particular relates to a scattering imaging system and a scattering imaging method.
背景技术Background technique
在很多场景下,待成像目标处于非均匀介质中,传统的可见光成像无法观测目标。这种非均匀介质通常较为复杂,比如雨雪天气、雾霾天气、浑浊水体等等。在这种介质中,光的传播不再遵循“沿直线传播”这一基本原则,光子的传播方向会受到非均匀介质的干扰而改变,从而变得随机化。这种现象称为“散射”,这种非均匀介质称为“散射介质”。当物体处于散射介质中时,传统的散射成像方法无法获取到隐藏目标的信息。因此,如何克服散射效应,透过散射介质获取隐藏目标信息,具有重要的科研意义与价值。In many scenarios, the target to be imaged is in a heterogeneous medium, and traditional visible light imaging cannot observe the target. Such heterogeneous media are usually complex, such as rainy and snowy weather, haze weather, turbid water, and so on. In this medium, the propagation of light no longer follows the basic principle of "propagating along a straight line", and the propagation direction of photons will be changed by the interference of the non-uniform medium, thus becoming randomized. This phenomenon is called "scattering", and this kind of non-uniform medium is called "scattering medium". When the object is in the scattering medium, the traditional scattering imaging method cannot obtain the information of the hidden target. Therefore, how to overcome the scattering effect and obtain hidden target information through the scattering medium has important scientific significance and value.
现有技术中有多种散射成像技术可克服散射效应,获得隐藏目标信息。其中一种技术为散斑相关技术,由于其系统较为简单,可实现单帧散斑成像,受到广大科研人员的广泛关注。但常规的二维散斑相关成像方法仅关注隐藏目标的平面形状,无法获取隐藏目标的深度信息,因此无法获得三维图像。There are a variety of scattering imaging technologies in the prior art that can overcome the scattering effect and obtain hidden target information. One of the techniques is the speckle correlation technique, because its system is relatively simple and can realize single-frame speckle imaging, which has attracted extensive attention of researchers. However, the conventional two-dimensional speckle correlation imaging method only focuses on the plane shape of the hidden target, and cannot obtain the depth information of the hidden target, so it cannot obtain a three-dimensional image.
发明内容Contents of the invention
本发明解决的技术问题是:如何获取散射介质中目标的深度信息,以构建三维图像。The technical problem solved by the invention is: how to obtain the depth information of the target in the scattering medium to construct a three-dimensional image.
本申请公开了一种散射成像系统,所述成像系统包括:The application discloses a scattering imaging system, and the imaging system includes:
光源模块,用于产生照明散射介质中的各个目标对象的动态散斑;a light source module, configured to generate dynamic speckles that illuminate each target object in the scattering medium;
成像模块,用于获取所述各个目标对象被所述动态散斑照明后形成的混合散斑图案。An imaging module, configured to acquire a mixed speckle pattern formed after each target object is illuminated by the dynamic speckle.
优选地,所述光源模块包括激光器和空间光调制器,所述空间光调制器用于将激光器产生的激光光束转换为动态散斑。Preferably, the light source module includes a laser and a spatial light modulator, and the spatial light modulator is used to convert the laser beam generated by the laser into dynamic speckle.
优选地,所述成像模块包括显微物镜、滤光片、筒镜和相机,所述目标对象被照明后产生的光束依次通过所述显微物镜、所述滤光片、所述筒镜后到达所述相机。Preferably, the imaging module includes a microscopic objective lens, an optical filter, a tube lens and a camera, and the light beam generated after the target object is illuminated passes through the microscopic objective lens, the optical filter, and the tube lens sequentially. Reach the camera.
优选地,所述成像系统还包括二向色镜,所述二向色镜位于所述显微物镜和所述滤光片之间,所述二向色镜用于将动态散斑反射至所述散射介质中的目标对象,且所述二向色镜用于透过所述目标对象被照明后产生的光束。Preferably, the imaging system further includes a dichroic mirror, the dichroic mirror is located between the microscope objective lens and the filter, and the dichroic mirror is used to reflect the dynamic speckle to the The target object in the scattering medium, and the dichroic mirror is used to transmit the light beam generated by the target object after being illuminated.
本申请还公开了一种散射散射成像方法,所述散射成像方法包括:The present application also discloses a scattering imaging method, the scattering imaging method comprising:
根据预先获取的多帧混合散斑图像提取得到每个目标对象的指纹散斑图案,每帧混合散斑图像包含散射介质中多个目标对象的散斑图案;Extract the fingerprint speckle pattern of each target object according to the pre-acquired multi-frame mixed speckle image, and each frame of mixed speckle image contains speckle patterns of multiple target objects in the scattering medium;
选定其中一个目标对象的指纹散斑图案作为标定图案,对其余各个目标对象的指纹散斑图案进行缩放处理,使得各个缩放后的指纹散斑图案与所述标定图案之间的相关性均满足预定条件;The fingerprint speckle pattern of one of the target objects is selected as the calibration pattern, and the fingerprint speckle patterns of the other target objects are scaled, so that the correlation between each scaled fingerprint speckle pattern and the calibration pattern satisfies predetermined conditions;
对各个缩放后的指纹散斑图案与所述标定图案进行反卷积处理,得到其余各个目标对象相对于作为标定的目标对象的横向相对位置关系图像,根据各个缩放后的指纹散斑图案的缩放比例确定其余各个目标对象相对于作为标定的目标对象的轴向相对位置;Perform deconvolution processing on each scaled fingerprint speckle pattern and the calibration pattern to obtain the horizontal relative positional relationship images of the remaining target objects relative to the target object as the calibration target object, according to the scaling of each scaled fingerprint speckle pattern The scale determines the axial relative position of each remaining target object relative to the target object as calibration;
根据各轴向相对位置将各帧横向相对位置关系图像进行合并,得到三维图像。According to the relative position of each axial direction, the horizontal relative position relationship images of each frame are combined to obtain a three-dimensional image.
优选地,所述散射成像方法还包括:利用所述散射成像系统获取得到多帧混合散斑图像。Preferably, the scatter imaging method further includes: acquiring multiple frames of mixed speckle images by using the scatter imaging system.
优选地,根据预先获取的多帧混合散斑图像提取得到每个目标对象的指纹散斑图案的方法包括:Preferably, the method for extracting the fingerprint speckle pattern of each target object according to the pre-acquired multi-frame mixed speckle image includes:
对各帧混合散斑图像中的非散斑图案区域进行裁剪,保留散斑图案区域;Crop the non-speckle pattern area in the mixed speckle image of each frame, and keep the speckle pattern area;
对裁剪后的各帧混合散斑图像进行滤波合并处理后,利用本征矩阵提取算法得到每个目标对象的指纹散斑图案。After filtering and merging the cropped mixed speckle images of each frame, the fingerprint speckle pattern of each target object is obtained by using the intrinsic matrix extraction algorithm.
优选地,所述预定条件为缩放后的指纹散斑图案与所述标定图案之间的相关性最大。Preferably, the predetermined condition is that the correlation between the scaled fingerprint speckle pattern and the calibration pattern is the largest.
本发明公开的一种散射成像系统和散射成像方法,具有如下技术效果:A scattering imaging system and scattering imaging method disclosed in the present invention have the following technical effects:
在获取到包含各个目标对象的混合散斑图案后提取出各个目标对象的指纹散斑图案,对指纹散斑图案进行缩放处理,根据缩放比例确定各个目标对象之前的相对深度以及结合反卷积算法获得各个目标对象之间的横向相对位置关系,最后进一步得到大视场范围内的三维图像。After the mixed speckle pattern containing each target object is obtained, the fingerprint speckle pattern of each target object is extracted, the fingerprint speckle pattern is scaled, and the relative depth of each target object is determined according to the scaling ratio and combined with the deconvolution algorithm The lateral relative positional relationship between each target object is obtained, and finally a three-dimensional image within a large field of view is further obtained.
附图说明Description of drawings
图1为本发明的实施例一的散射成像系统的示意图;FIG. 1 is a schematic diagram of a scattering imaging system according to Embodiment 1 of the present invention;
图2为本发明的实施例二中的散射成像系统的流程图。FIG. 2 is a flowchart of the scattering imaging system in Embodiment 2 of the present invention.
具体实施方式Detailed ways
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
在详细描述本申请的各个实施例之前,首先简单描述本申请的技术构思:现有的散斑相关技术通常只能获取得到隐藏目标的二维平面形状,无法获取得到深度信息。为此,本申请提供了一种散射成像系统和散射成像方法,通过光源模块产生动态散斑以照明散射介质中的各个目标对象,并利用成像模块获取到各个目标对象的混合散斑图案。接着从混合散斑图案中提取出各个目标对象的指纹散斑图案,对指纹散斑图案进行缩放处理,根据缩放比例确定各个目标对象之前的相对深度以及结合反卷积算法获得各个目标对象之间的横向相对位置关系,最后进一步得到三维图像。Before describing the various embodiments of the present application in detail, the technical concept of the present application is briefly described first: the existing speckle correlation technology usually can only obtain the two-dimensional plane shape of the hidden target, but cannot obtain the depth information. To this end, the present application provides a scattering imaging system and a scattering imaging method. A light source module generates dynamic speckle to illuminate each target object in a scattering medium, and an imaging module is used to obtain a mixed speckle pattern of each target object. Then extract the fingerprint speckle pattern of each target object from the mixed speckle pattern, scale the fingerprint speckle pattern, determine the relative depth of each target object according to the scaling ratio, and combine the deconvolution algorithm to obtain the distance between each target object. The relative positional relationship in the lateral direction, and finally a three-dimensional image is further obtained.
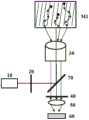
具体来说,如图1所示,本实施例一的散射成像系统包括光源模块和成像模块,光源模块用于产生照明散射介质中的各个目标对象的动态散斑,成像模块用于获取各个目标对象被动态散斑照明后形成的混合散斑图案。Specifically, as shown in Figure 1, the scattering imaging system of the first embodiment includes a light source module and an imaging module. The hybrid speckle pattern formed by an object illuminated by dynamic speckle.
示例性地,光源模块包括激光器10和空间光调制器20,空间光调制器20用于将激光器10产生的激光光束转换为动态散斑。在其他实施方式中,光源模块还可以由其他部件来组成,以产生动态散斑。Exemplarily, the light source module includes a
进一步地,成像模块包括显微物镜30、滤光片40、筒镜50和相机60,目标对象被照明后产生的光束依次通过显微物镜30、滤光片40、筒镜50后到达相机60,形成混合散斑图案。示例性地,将单个目标对象发出的光穿过散射介质所产生的散斑定义为该目标对象的指纹散斑。当使用非相干光对某个物体进行照明时,在某一时刻,相机捕获的图像是来自多个目标对象的指纹散斑的非相干总和,即由多个目标对象的指纹散斑图案叠加得到的混合散斑图案。Further, the imaging module includes a microscope
举例来讲,假设待成像物体为处于散射介质M1中的荧光物体,当空间光调制器20产生的动态散斑照明到荧光物体后,荧光物体中的多个荧光颗粒(即为本实施例一中的多个目标对象)会激发产生荧光光束,荧光光束依次通过显微物镜30、滤光片40、筒镜50,最后在相机60上形成多束荧光光束叠加形成的混合散斑图像。For example, assuming that the object to be imaged is a fluorescent object in the scattering medium M1, when the dynamic speckle generated by the
进一步地,成像系统还包括二向色镜70,二向色镜70位于显微物镜30和滤光片40之间,二向色镜70用于将动态散斑反射至散射介质中的目标对象,且二向色镜70用于透过目标对象被照明后产生的光束。Further, the imaging system further includes a
如图2所示,本实施例二公开了一种散射成像方法,该散射成像方法包括如下步骤:As shown in Figure 2, the second embodiment discloses a scattering imaging method, the scattering imaging method includes the following steps:
步骤S10:根据预先获取的多帧混合散斑图像提取得到每个目标对象的指纹散斑图案,每帧混合散斑图像包含散射介质中多个目标对象的散斑图案;Step S10: Extracting the fingerprint speckle pattern of each target object according to the pre-acquired multi-frame mixed speckle image, where each frame of mixed speckle image contains speckle patterns of multiple target objects in the scattering medium;
步骤S20:选定其中一个目标对象的指纹散斑图案作为标定图案,对其余各个目标对象的指纹散斑图案进行缩放处理,使得各个缩放后的指纹散斑图案与所述标定图案之间的相关性均满足预定条件;Step S20: Select the fingerprint speckle pattern of one of the target objects as the calibration pattern, and perform scaling processing on the fingerprint speckle patterns of the remaining target objects, so that the correlation between each scaled fingerprint speckle pattern and the calibration pattern Both sexes meet the predetermined conditions;
步骤S30:对各个缩放后的指纹散斑图案与所述标定图案进行反卷积处理,得到其余各个目标对象相对于作为标定的目标对象的横向相对位置关系图像,根据各个缩放后的指纹散斑图案的缩放比例确定其余各个目标对象相对于作为标定的目标对象的轴向相对位置;Step S30: Perform deconvolution processing on each scaled fingerprint speckle pattern and the calibration pattern, and obtain the horizontal relative positional relationship images of the remaining target objects relative to the target object as the calibration target object, according to each scaled fingerprint speckle pattern The scaling ratio of the pattern determines the axial relative position of each remaining target object with respect to the target object as calibration;
步骤S40:根据各轴向相对位置将各帧横向相对位置关系图像进行合并,得到三维图像。Step S40: According to the relative position of each axis, merge the horizontal relative position relationship images of each frame to obtain a three-dimensional image.
具体地,利用实施例一中的散射成像系统获取得到包含散射介质中多个目标对象的散斑图案的混合散斑图像,混合散斑图像数量可根据实际需要进行选择,本实施例二采集了数千帧混合散斑图像。Specifically, a mixed speckle image including speckle patterns of multiple target objects in a scattering medium is obtained by using the scattering imaging system in the first embodiment, and the number of mixed speckle images can be selected according to actual needs. In the second embodiment, the Thousands of frames of mixed speckle images.
进一步地,在步骤S10中,由于每帧混合散斑图像包含散斑图案区域和非散斑图案区域,为了降低计算时间,将非散斑图案区域裁剪,保留散斑图案区域。接着对裁剪后的各帧混合散斑图像进行滤波合并处理后,利用本征矩阵提取算法得到每个目标对象的指纹散斑图案。示例性地,在裁剪之后的各帧混合散斑图像进行高通滤波处理,以提升散斑图案的对比度。Further, in step S10, since each frame of the mixed speckle image includes a speckle pattern area and a non-speckle pattern area, in order to reduce calculation time, the non-speckle pattern area is cropped and the speckle pattern area is retained. Then, after filtering and merging the cropped mixed speckle images of each frame, the fingerprint speckle pattern of each target object is obtained by using the intrinsic matrix extraction algorithm. Exemplarily, the mixed speckle images of each frame after cropping are processed by high-pass filtering, so as to improve the contrast of the speckle pattern.
进一步地,根据横向光学记忆效应,处于记忆效应范围内的两个目标对象所产生的散斑图案是高度相关的,其空间偏移量取决于两个散射目标之间的相对位置,依据轴向光学记忆效应,处于不同空间平面的点光源所形成的散斑图案在经过缩放处理后是高度相关的。为此,在步骤S20中,从多个目标对象中选择其中一个作为标定对象,并将对应的指纹散斑图案作为标定图案,对其余每一个指纹散斑图案逐次调整缩放比例进行缩放处理,每次调整缩放比例之后,计算缩放后的指纹散斑图案与标定图案的相关性,直至相关性满足预定条件。示例性地,预定条件为缩放后的指纹散斑图案与所述标定图案之间的相关性最大。当满足预定条件后,则停止缩放,获得最终的缩放后的指纹散斑图案。Furthermore, according to the transverse optical memory effect, the speckle patterns generated by two target objects within the range of the memory effect are highly correlated, and their spatial offset depends on the relative position between the two scattering targets, according to the axial Optical memory effect, the speckle patterns formed by point light sources in different spatial planes are highly correlated after scaling. To this end, in step S20, one of the multiple target objects is selected as the calibration object, and the corresponding fingerprint speckle pattern is used as the calibration pattern, and the scaling ratio is successively adjusted for each of the remaining fingerprint speckle patterns for scaling processing, each After adjusting the scaling ratio for the second time, the correlation between the scaled fingerprint speckle pattern and the calibration pattern is calculated until the correlation satisfies a predetermined condition. Exemplarily, the predetermined condition is that the correlation between the scaled fingerprint speckle pattern and the calibration pattern is maximum. When the predetermined condition is satisfied, the scaling is stopped, and the final scaled fingerprint speckle pattern is obtained.
进一步地,对各个缩放后的指纹散斑图案与标定图案进行反卷积处理,得到其余各个目标对象相对于标定对象的横向相对位置关系图像,同时根据各个缩放后的指纹散斑图案的缩放比例确定其余各个目标对象相对于标定对象的轴向相对位置。其中,可以得出缩放比例与相对深度之间的对应关系,当确定了各个指纹散斑图案的缩放比例后即可确定,其余目标对象相对于标定对象的轴向相对位置。Further, perform deconvolution processing on each scaled fingerprint speckle pattern and the calibration pattern, and obtain the horizontal relative positional relationship images of the remaining target objects relative to the calibration object, and at the same time according to the scaling ratio of each scaled fingerprint speckle pattern Determine the axial relative position of each remaining target object with respect to the calibration object. Wherein, the corresponding relationship between the scaling ratio and the relative depth can be obtained. After the scaling ratio of each fingerprint speckle pattern is determined, the axial relative positions of other target objects relative to the calibration object can be determined.
最后,在步骤S40中,根据每两个目标对象的轴向相对位置,将表征每两个目标对象横向相对位置的相对位置关系图像进行合并,即可得到三维图像。Finally, in step S40, according to the axial relative positions of each two target objects, the relative position relationship images representing the lateral relative positions of each two target objects are combined to obtain a three-dimensional image.
其中,对于超出光学记忆效应范围的两个散射目标来说,采用传统方法是难以确定两个散射目标的相对位置关系。本实施例二确定了其余各个散斑相对于标定散斑的位置,由于标定散斑的位置可确定,那么其余任意两个散斑之间的位置也是可以确定的,即对于超出光学记忆效应范围的两个散射目标的相对位置可通过本实施例二的方法来确定,从而增大了图像视场。Among them, for two scattering targets beyond the scope of optical memory effect, it is difficult to determine the relative positional relationship of the two scattering targets by using traditional methods. In the second embodiment, the position of each other speckle relative to the calibration speckle is determined. Since the position of the calibration speckle can be determined, the position between any two other speckles can also be determined, that is, for The relative positions of the two scattering targets can be determined by the method of the second embodiment, thereby increasing the field of view of the image.
上面对本发明的具体实施方式进行了详细描述,虽然已表示和描述了一些实施例,但本领域技术人员应该理解,在不脱离由权利要求及其等同物限定其范围的本发明的原理和精神的情况下,可以对这些实施例进行修改和完善,这些修改和完善也应在本发明的保护范围内。The specific embodiments of the present invention have been described in detail above. Although some embodiments have been shown and described, those skilled in the art should understand that without departing from the principle and spirit of the present invention whose scope is defined by the claims and their equivalents Under the circumstances, these embodiments can be modified and improved, and these modifications and improvements should also be within the protection scope of the present invention.
Claims (8)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310290600.5ACN116320355A (en) | 2023-03-23 | 2023-03-23 | Scattering imaging system and scattering imaging method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310290600.5ACN116320355A (en) | 2023-03-23 | 2023-03-23 | Scattering imaging system and scattering imaging method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN116320355Atrue CN116320355A (en) | 2023-06-23 |
Family
ID=86783176
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310290600.5APendingCN116320355A (en) | 2023-03-23 | 2023-03-23 | Scattering imaging system and scattering imaging method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116320355A (en) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101303302A (en)* | 2007-05-11 | 2008-11-12 | 深圳大学 | Method and device for realizing quasi-confocal fluorescence microscopy with dynamic speckle illumination |
| CN101496033A (en)* | 2006-03-14 | 2009-07-29 | 普莱姆森斯有限公司 | Depth-varying light fields for three dimensional sensing |
| US20100224796A1 (en)* | 2005-09-09 | 2010-09-09 | Jerome Mertz | Imaging System Using Dynamic Speckle Illumination |
| CN111257287A (en)* | 2020-01-22 | 2020-06-09 | 清华大学深圳国际研究生院 | Large-field-of-view scattering imaging method and device based on no-priori target positioning |
| WO2020132960A1 (en)* | 2018-12-26 | 2020-07-02 | 合刃科技(深圳)有限公司 | Defect detection method and defect detection system |
| CN111917964A (en)* | 2020-08-21 | 2020-11-10 | 青岛联合创智科技有限公司 | Lens-free fluorescent microscopic imaging device and image reconstruction method thereof |
| WO2021218196A1 (en)* | 2020-04-29 | 2021-11-04 | 奥比中光科技集团股份有限公司 | Depth imaging method and apparatus, and computer readable storage medium |
| CN114721143A (en)* | 2020-12-22 | 2022-07-08 | 南京理工大学 | A device and method for reconstructing an image after passing through a scattering medium |
| CN115496653A (en)* | 2021-06-18 | 2022-12-20 | 南京理工大学 | Depth-resolved imaging method for scattering media based on PSF scaling |
| CN115728926A (en)* | 2022-11-29 | 2023-03-03 | 中国科学院上海光学精密机械研究所 | Method of 3D Localization and Imaging Through Scattering Media Based on Double Helix Point Spread Function |
- 2023
- 2023-03-23CNCN202310290600.5Apatent/CN116320355A/enactivePending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100224796A1 (en)* | 2005-09-09 | 2010-09-09 | Jerome Mertz | Imaging System Using Dynamic Speckle Illumination |
| CN101496033A (en)* | 2006-03-14 | 2009-07-29 | 普莱姆森斯有限公司 | Depth-varying light fields for three dimensional sensing |
| CN101303302A (en)* | 2007-05-11 | 2008-11-12 | 深圳大学 | Method and device for realizing quasi-confocal fluorescence microscopy with dynamic speckle illumination |
| WO2020132960A1 (en)* | 2018-12-26 | 2020-07-02 | 合刃科技(深圳)有限公司 | Defect detection method and defect detection system |
| CN111257287A (en)* | 2020-01-22 | 2020-06-09 | 清华大学深圳国际研究生院 | Large-field-of-view scattering imaging method and device based on no-priori target positioning |
| WO2021218196A1 (en)* | 2020-04-29 | 2021-11-04 | 奥比中光科技集团股份有限公司 | Depth imaging method and apparatus, and computer readable storage medium |
| CN111917964A (en)* | 2020-08-21 | 2020-11-10 | 青岛联合创智科技有限公司 | Lens-free fluorescent microscopic imaging device and image reconstruction method thereof |
| CN114721143A (en)* | 2020-12-22 | 2022-07-08 | 南京理工大学 | A device and method for reconstructing an image after passing through a scattering medium |
| CN115496653A (en)* | 2021-06-18 | 2022-12-20 | 南京理工大学 | Depth-resolved imaging method for scattering media based on PSF scaling |
| CN115728926A (en)* | 2022-11-29 | 2023-03-03 | 中国科学院上海光学精密机械研究所 | Method of 3D Localization and Imaging Through Scattering Media Based on Double Helix Point Spread Function |
Non-Patent Citations (1)
| Title |
|---|
| 王金超;周昕;白星;王晶;: "基于辅助参考物的穿透散射介质成像分析", 光学与光电技术, no. 03, 10 June 2020 (2020-06-10)* |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5001286B2 (en) | Object reconstruction method and system | |
| CN108680544B (en) | Structured illumination light slice fluorescence microscopic imaging method and device | |
| CN112525107B (en) | Structured light three-dimensional measurement method based on event camera | |
| JP4865930B2 (en) | System and method for generating an optically sectioned image using both structured and uniform illumination | |
| JP6637653B2 (en) | Microscope and SPIM microscopy method | |
| CN106767534B (en) | Stereomicroscopy system and mating 3 d shape high score reconstructing method based on FPM | |
| CN106199941A (en) | A frequency shifting light field microscope and three-dimensional super-resolution microscopic display method | |
| KR102253320B1 (en) | Method for displaying 3 dimension image in integral imaging microscope system, and integral imaging microscope system implementing the same | |
| US10830701B2 (en) | Scanned line angular projection microscopy | |
| CN113625439B (en) | Digital scanning structured light super-resolution microscopic imaging system and method for flat field illumination | |
| CN112161953A (en) | A Broad Spectrum Single Frame Scattering Imaging Method Based on Scattering Medium | |
| JP2022524923A (en) | Imaging systems and methods via scattering media | |
| CN115965703A (en) | A reconstruction method for 3D microscopic images of light slices illuminated by high-fidelity structured light | |
| CN107534731A (en) | Image processing device and image processing method | |
| EP3830628B1 (en) | Device and process for capturing microscopic plenoptic images with turbulence attenuation | |
| CN108982455B (en) | Multi-focus light section fluorescence microscopic imaging method and device | |
| CN116320355A (en) | Scattering imaging system and scattering imaging method | |
| US9696255B2 (en) | Image processing method of two-photon structured illumination point scanning microscopy | |
| Jamwal et al. | A survey on depth map estimation strategies | |
| CN112326609A (en) | Real-time three-dimensional fluorescence differential super-resolution imaging method and device based on polarization multiplexing | |
| KR102578312B1 (en) | Hologram-based object three-dimensional mesurement device and method | |
| CN116338922A (en) | Two-photon synthetic aperture microscopy system and method based on adjustable focus lens | |
| CN110196232B (en) | Confocal imaging device and confocal imaging method | |
| CN117705061A (en) | Composite optical system and depth detection system | |
| JPH06308390A (en) | Confocal microscope |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |