CN116155639A - Drive and mining data interaction method, device and medium based on CANOPEN protocol - Google Patents
Drive and mining data interaction method, device and medium based on CANOPEN protocolDownload PDFInfo
- Publication number
- CN116155639A CN116155639ACN202211626059.2ACN202211626059ACN116155639ACN 116155639 ACN116155639 ACN 116155639ACN 202211626059 ACN202211626059 ACN 202211626059ACN 116155639 ACN116155639 ACN 116155639A
- Authority
- CN
- China
- Prior art keywords
- data
- time
- message
- invalid
- node
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40006—Architecture of a communication node
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J3/00—Time-division multiplex systems
- H04J3/02—Details
- H04J3/06—Synchronising arrangements
- H04J3/0635—Clock or time synchronisation in a network
- H04J3/0638—Clock or time synchronisation among nodes; Internode synchronisation
- H04J3/0658—Clock or time synchronisation among packet nodes
- H04J3/0661—Clock or time synchronisation among packet nodes using timestamps
- H04J3/0667—Bidirectional timestamps, e.g. NTP or PTP for compensation of clock drift and for compensation of propagation delays
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40169—Flexible bus arrangements
- H04L12/40176—Flexible bus arrangements involving redundancy
- H04L12/40189—Flexible bus arrangements involving redundancy by using a plurality of bus systems
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L63/00—Network architectures or network communication protocols for network security
- H04L63/12—Applying verification of the received information
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40208—Bus networks characterized by the use of a particular bus standard
- H04L2012/40215—Controller Area Network CAN
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40267—Bus for use in transportation systems
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Computer Security & Cryptography (AREA)
- Computer Hardware Design (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Synchronisation In Digital Transmission Systems (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及列车信号控制系统,尤其是涉及一种基于CANOPEN协议的驱采数据交互方法、设备及介质。The invention relates to a train signal control system, in particular to a driving-production data interaction method, equipment and medium based on the CANOPEN protocol.
背景技术Background technique
轨道交通信号行业中,对设备的驱动和信号采集是一种较常见的控制行为,道岔控制器便是完成此功能的系统之一。道岔控制系统中包含逻辑处理单元,IO执行单元等子系统。IO执行单元主要负责对外围设备的驱动以及对外围设备状态的采集,逻辑处理单元负责系统逻辑运算,根据逻辑运算结果生成驱动信息,发送给IO执行单元对设备进行驱动;同时处理IO执行单元采集的设备状态信息等。作为高安全性产品,道岔控制系统中对驱采过程的安全反应时间、数据的安全性有着严格的要求,逻辑处理单元与IO执行单元间数据交互的及时性,可靠性尤为重要。通信协议的选取与通信机制的设计是整个系统的关键一环。In the rail transit signal industry, the drive and signal acquisition of equipment is a relatively common control behavior, and the turnout controller is one of the systems that complete this function. The turnout control system includes logic processing unit, IO execution unit and other subsystems. The IO execution unit is mainly responsible for driving the peripheral equipment and collecting the state of the peripheral equipment. The logic processing unit is responsible for the system logic operation, generates driving information according to the logic operation result, and sends it to the IO execution unit to drive the device; at the same time, it processes the IO execution unit acquisition. device status information, etc. As a high-security product, the turnout control system has strict requirements on the safety response time and data security of the driving process. The timeliness and reliability of data interaction between the logic processing unit and the IO execution unit are particularly important. The selection of communication protocol and the design of communication mechanism are the key links of the whole system.
因此如何来提供一种低成本、高效率、高可用性及高可靠性的驱采数据交互技术,成为需要解决的技术问题。Therefore, how to provide a low-cost, high-efficiency, high-availability and high-reliability driving-production data interaction technology has become a technical problem to be solved.
发明内容Contents of the invention
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种低成本、高效率、高可用性及高可靠性的基于CANOPEN协议的驱采数据交互方法、设备及介质。The purpose of the present invention is to provide a low-cost, high-efficiency, high-availability and high-reliability drive-production data interaction method, equipment and medium based on the CANOPEN protocol in order to overcome the above-mentioned defects in the prior art.
本发明的目的可以通过以下技术方案来实现:The purpose of the present invention can be achieved through the following technical solutions:
根据本发明的第一方面,提供了一种基于CANOPEN协议的驱采数据交互方法,该方法用于逻辑处理单元与IO执行单元间数据交互,所述交互方法选用CAN总线作为通信介质,采用主从模式,将逻辑处理单元作为主站节点,IO执行单元作为从站节点,并使用CANOPEN通信协议,同步报文和时间戳报文用来统一时间基准并对时间进行校正,同时采用PDO报文用来传输采集数据以及驱动命令消息。According to the first aspect of the present invention, a driving and mining data interaction method based on the CANOPEN protocol is provided. The method is used for data interaction between the logic processing unit and the IO execution unit. In the slave mode, the logic processing unit is used as the master node, the IO execution unit is used as the slave node, and the CANOPEN communication protocol is used. The synchronization message and the timestamp message are used to unify the time reference and correct the time, and at the same time, the PDO message is used It is used to transmit collected data and drive command messages.
作为优选的技术方案,该方法具体包括以下步骤:As a preferred technical solution, the method specifically includes the following steps:
步骤S1,主站节点周期性广播时间戳报文;Step S1, the master node periodically broadcasts a timestamp message;
步骤S2,所有节点接收到时间戳报文后同步本地时间,同时计算出预失效时间;Step S2, all nodes synchronize the local time after receiving the timestamp message, and calculate the pre-failure time at the same time;
步骤S3,主站节点周期性发送同步报文;Step S3, the master station node periodically sends a synchronization message;
步骤S4,各节点根据定时器状态判断同步报文有效性;Step S4, each node judges the validity of the synchronization message according to the state of the timer;
步骤S5,各节点接收到有效同步报文后使用预失效时间计算得到数据安全层,并进行数据的发送和接收处理;Step S5, each node calculates the data security layer using the pre-failure time after receiving the valid synchronization message, and performs data sending and receiving processing;
步骤S6,各节点重新计算预失效时间。Step S6, each node recalculates the pre-failure time.
作为优选的技术方案,所述步骤S2预失效时间计算方式为:As a preferred technical solution, the calculation method of the pre-failure time in the step S2 is:
Tinvalid=TNTP+TSYNC,Tinvalid为最新预失效时间,TNTP为接收到的时间戳报文时间,TSYNC为同步报文周期。Tinvalid = TNTP + TSYNC , where Tinvalid is the latest pre-invalidation time, TNTP is the time of the received timestamp message, and TSYNC is the period of the synchronization message.
作为优选的技术方案,所述步骤S4具体包括:As a preferred technical solution, the step S4 specifically includes:
某节点收到同步报文后检查定时器状态,超时或者过早收到同步报文都视为无效报文,则本次不进行数据处理,并重载定时器计时到下次同步报文到来时刻;若在有效时间范围内收到同步报文,则重启定时器。A node checks the status of the timer after receiving the synchronization message. If it times out or receives the synchronization message too early, it will be regarded as an invalid message. The data processing will not be performed this time, and the timer will be reloaded until the next synchronization message arrives. time; if the synchronization message is received within the valid time range, the timer will be restarted.
作为优选的技术方案,所述步骤S5具体为:As a preferred technical solution, the step S5 is specifically:
最新预失效时间Tinvalid参与PDO数据安全层的计算,采集数据和驱动命令在发送前均需添加安全层。The latest pre-invalidation time Tinvalid participates in the calculation of the PDO data security layer, and a security layer needs to be added before the collected data and drive commands are sent.
作为优选的技术方案,所述逻辑处理单元各节点收到同步报文后,处理如下:As a preferred technical solution, after each node of the logical processing unit receives the synchronization message, the processing is as follows:
将逻辑运算产生的驱动命令添加安全层后发送到IO执行单元;Add a security layer to the driving command generated by the logical operation and send it to the IO execution unit;
处理从IO执行单元接收到的采集数据,使用Tinvalid校验数据的安全层,校验不通过丢弃数据。Process the collected data received from the IO execution unit, use Tinvalid to verify the security layer of the data, and discard the data if the verification fails.
作为优选的技术方案,所述IO执行单元的各节点接收到同步报文后,处理如下:As a preferred technical solution, after each node of the IO execution unit receives the synchronization message, the processing is as follows:
IO执行单元将采集到的设备状态信息添加安全层后发送给逻辑处理单元;The IO execution unit adds a security layer to the collected device status information and sends it to the logic processing unit;
IO执行单元收到的驱动命令后使用Tinvalid校验数据的安全层,校验通过根据命令驱动外部设备。After receiving the drive command, the IO execution unit uses Tinvalid to verify the security layer of the data, and the verification passes to drive the external device according to the command.
作为优选的技术方案,所述步骤S6预失效时间计算方式为:As a preferred technical solution, the calculation method of the pre-failure time in the stepS6 is:
Tinvalid=Tpre-invalid+TSYNC,Tinvalid为最新预失时效时间,Tpre-invalid为上次计算出的预失效时间,TSYNC为同步报文周期。Tinvalid = Tpre-invalid + TSYNC , where Tinvalid is the latest pre-invalidation time, Tpre-invalid is the last calculated pre-invalidation time, and TSYNC is the period of the synchronization message.
根据本发明的第二方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述的方法。According to a second aspect of the present invention, an electronic device is provided, including a memory and a processor, the memory stores a computer program, and the processor implements the method when executing the program.
根据本发明的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的方法。According to a third aspect of the present invention, a computer-readable storage medium is provided, on which a computer program is stored, and when the program is executed by a processor, the method is implemented.
与现有技术相比,本发明具有以下优点:Compared with the prior art, the present invention has the following advantages:
1、针对通信频繁但单包数据量较小的应用场景,选取了CAN总线,通过对CANOPE协议中同步报文、时间戳报文、PDO报文的创新组合,加入保障机制,保证了数据的周期有效性,及时性;1. For the application scenarios with frequent communication but small amount of data in a single packet, the CAN bus is selected. Through the innovative combination of synchronization messages, time stamp messages, and PDO messages in the CANOPE protocol, a guarantee mechanism is added to ensure data security. cycle effectiveness, timeliness;
2、为保证整个系统中数据的时效性,上述方案结合同步报文和时间戳报文设计了预失效时间机制,预失效时间参与PDO数据安全层的计算,接收数据方通过对安全层的校验对时效性安全性进行确认。2. In order to ensure the timeliness of data in the entire system, the above scheme combines the synchronous message and the timestamp message to design a pre-failure time mechanism. The pre-failure time participates in the calculation of the PDO data security layer. Verify the timeliness and safety.
3、逻辑处理单元和IO执行单元均包含多个节点,方案中各节点均维系一个与同步报文绑定的定时器,用来监测同步报文的有效性,避免了因无条件信任同步报文而造成的数据不可靠。3. Both the logic processing unit and the IO execution unit include multiple nodes. In the scheme, each node maintains a timer bound to the synchronization message to monitor the validity of the synchronization message, avoiding unconditional trust in the synchronization message resulting in unreliable data.
4、时间戳报文和同步报文周期性更新预失效时间,可以保证每周期各节点预失效时间的一致性,同时各节点通过时间戳报文同步主站节点时间,避免不同节点因时钟漂移造成累计误差扩大,最终导致数据失效。4. Timestamp messages and synchronization messages periodically update the pre-failure time, which can ensure the consistency of the pre-failure time of each node in each cycle. At the same time, each node synchronizes the time of the master node through the timestamp message to avoid different nodes due to clock drift Causes the cumulative error to expand, and eventually leads to data failure.
附图说明Description of drawings
图1为道岔控制系统示意图;Fig. 1 is a schematic diagram of a turnout control system;
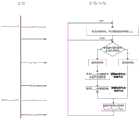
图2为逻辑处理单元与IO执行单元通信流程图;Fig. 2 is a communication flowchart between the logic processing unit and the IO execution unit;
具体实施方式Detailed ways
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts shall fall within the protection scope of the present invention.
逻辑处理单元与IO执行单元间数据交互频繁,但单次数据量较小,实时性要求高,所以本发明选用CAN总线作为通信介质,采用主从模式,逻辑处理单元中竞争出主站节点,IO执行单元均为从站节点,使用CANOPEN通信协议,同步报文和时间戳报文用来统一时间基准并对时间进行校正,PDO报文用来传输采集数据以及驱动命令消息。为了进一步保证数据的时效性和安全性,主站节点周期性广播时间戳报文,各节点收到时间戳报文后更新本地时间,并计算得出预计失效时间,预计失效时间以及设备标识等参与PDO报文安全层的计算,接收方校验安全层通过数据才是有效的,提高数据的安全性。同时,监测同步报文的有效性,各节点收到有效同步报文后才会处理PDO报文数据,并重新计算预计失效时间,保证了数据的持续有效性。The data interaction between the logic processing unit and the IO execution unit is frequent, but the amount of single data is small and the real-time requirement is high. Therefore, the present invention selects the CAN bus as the communication medium, adopts the master-slave mode, and competes for the master station node in the logic processing unit. The IO execution units are all slave nodes, using the CANOPEN communication protocol, the synchronization message and the time stamp message are used to unify the time reference and correct the time, and the PDO message is used to transmit the collected data and drive command messages. In order to further ensure the timeliness and security of the data, the master station node periodically broadcasts the time stamp message, each node updates the local time after receiving the time stamp message, and calculates the expected failure time, expected failure time and equipment identification, etc. Participate in the calculation of the PDO message security layer, and the receiver verifies that the security layer passes the data to be valid, improving data security. At the same time, the validity of the synchronization message is monitored, and each node will process the PDO message data after receiving a valid synchronization message, and recalculate the expected failure time to ensure the continuous validity of the data.
本发明具体过程如下:Concrete process of the present invention is as follows:
S1:主站节点周期性广播时间戳报文(NTP)。S1 : The master node periodically broadcasts a time stamp message (NTP).
S2:所有节点接收到时间戳报文后同步本地时间,同时计算出预失效时间。S2 : All nodes synchronize the local time after receiving the timestamp message, and calculate the pre-failure time at the same time.
S3:主站节点周期性发送同步报文(SYNC)。S3 : the master station node periodically sends a synchronization message (SYNC).
S4:各节点根据定时器状态判断同步报文有效性。S4 : Each node judges the validity of the synchronization message according to the state of the timer.
S5:各节点接收到有效同步报文后使用预失效时间计算得到数据安全层,并进行数据的发送和接收处理。S5 : each node calculates the data security layer using the pre-failure time after receiving the effective synchronization message, and performs data sending and receiving processing.
S6:各节点重新计算预失效时间。S6 : Each node recalculates the pre-failure time.
所述的步骤S2预失效时间计算方式为:The calculation method of the pre-failure time in the stepS2 is:
Tinvalid=TNTP+TSYNC,Tinvalid为最新预失效时间,TNTP为接收到的时间戳报文时间,TSYNC为同步报文周期。Tinvalid = TNTP + TSYNC , where Tinvalid is the latest pre-invalidation time, TNTP is the time of the received timestamp message, and TSYNC is the period of the synchronization message.
所述的步骤S4具体步骤包括:The concrete steps of described stepS4 include:
某节点收到同步报文后检查定时器状态,超时或者过早收到同步报文都视为无效报文,则本次不进行数据处理,并重载定时器计时到下次同步报文到来的时刻;若在有效时间范围内收到同步报文,则重启定时器。A node checks the status of the timer after receiving the synchronization message. If it times out or receives the synchronization message too early, it will be regarded as an invalid message. The data processing will not be performed this time, and the timer will be reloaded until the next synchronization message arrives. time; if the synchronization message is received within the valid time range, the timer will be restarted.
所述的步骤S5具体内容包括:Described stepS5 specific content comprises:
Tinvalid参与PDO数据安全层的计算,即采集数据和驱动命令在发送前均需添加安全层。Tinvalid participates in the calculation of the PDO data security layer, that is, both the collected data and the drive command need to add a security layer before sending.
逻辑处理单元各节点收到同步报文后:After each node of the logical processing unit receives the synchronization message:
1.将逻辑运算产生的驱动命令添加安全层后发送到IO执行单元。1. Add a security layer to the driving command generated by the logic operation and send it to the IO execution unit.
2.处理从IO执行单元接收到的采集数据,使用Tinvalid校验数据的安全层,校验不通过丢弃数据。2. Process the collected data received from the IO execution unit, use Tinvalid to verify the security layer of the data, and discard the data if the verification fails.
IO执行单元的各节点接收到同步报文后:After each node of the IO execution unit receives the synchronization message:
1.采集节点将采集到的设备状态信息添加安全层后发送给逻辑处理单元。1. The collection node adds a security layer to the collected device status information and sends it to the logical processing unit.
2.驱动节点收到的驱动命令后使用Tinvalid校验数据的安全层,校验通过根据命令驱动外部设备。2. After the drive node receives the drive command, use Tinvalid to verify the security layer of the data, and the verification passes to drive the external device according to the command.
所述的步骤S6预失效时间计算方式为:The calculation method of the pre-failure time in stepS6 is:
Tinvalid=Tpre-invalid+TSYNC,Tinvalid为最新预失时效时间,Tpre-invalid为上次计算出的预失效时间,TSYNC为同步报文周期。Tinvalid = Tpre-invalid+ TSYNC , where Tinvalid is the latest pre-invalidation time, Tpre-invalid is the last calculated pre-invalidation time, and TSYNC is the period of the synchronization message.
具体实施例specific embodiment
如图1所示,道岔控制系统中逻辑处理单元的A机和B机构成2乘2的冗余结构,内部的两块逻辑处理板构成2取2安全保障结构。逻辑处理单元负责进行逻辑运算,生成驱动命令通过冗余CAN总线发送给IO执行单元;同时逻辑处理单元负责处理来自IO执行单元的采集数据。As shown in Figure 1, machine A and machine B of the logic processing unit in the turnout control system form a 2x2 redundant structure, and the two internal logic processing boards form a 2-out-2 safety guarantee structure. The logic processing unit is responsible for logical operations, generating drive commands and sending them to the IO execution unit through the redundant CAN bus; at the same time, the logic processing unit is responsible for processing the collected data from the IO execution unit.
IO执行单元中采集板负责采集外部道岔设备的状态,并发送逻辑处理单元;驱动板负责接收来自逻辑处理单元的驱动命令,并驱动外部设备。The acquisition board in the IO execution unit is responsible for collecting the state of the external turnout equipment and sending it to the logical processing unit; the driving board is responsible for receiving the driving command from the logical processing unit and driving the external device.
如图2所示,举实例介绍本发明中逻辑处理单元与IO执行单元间驱采数据交互流程,主站节点由逻辑处理单元在初始化阶段竞争决出,其他节点均为从节点。时间戳报文和同步报文为广播方式,所有节点都可以收到,包括主站节点。时间戳报文周期为180ms,同步报文周期为60ms,定时器定时为同步报文周期长度。需要注意的是以下实例为动态持续过程的展示,不考虑相关初始值的设定部分。正常流程包括以下步骤:As shown in Figure 2, an example is given to introduce the driving data interaction process between the logic processing unit and the IO execution unit in the present invention. The master station node is determined by the logic processing unit in the initialization stage through competition, and the other nodes are all slave nodes. Timestamp messages and synchronization messages are broadcast and can be received by all nodes, including the master node. The time stamp message period is 180ms, the synchronization message period is 60ms, and the timer timing is the synchronization message period length. It should be noted that the following example is a demonstration of a dynamic continuous process, without considering the setting part of the relevant initial value. The normal process includes the following steps:
步骤S1,主站节点周期性广播时间戳报文和同步报文,时间戳报文携带时间为1135。In step S1, the master station node periodically broadcasts a time stamp message and a synchronization message, and the time stamp message carries a time of 1135.
步骤S2,所有主从节点接收到时间戳报文后,更新本地时间,并计算预失效时间Tinvalid=TNTP+TSYNC=1135+60=1195;Step S2, after all master and slave nodes receive the time stamp message, update the local time, and calculate the pre-invalidation time Tinvalid =TNTP+ TSYNC =1135+60=1195;
步骤S3,所有节点接收到同步报文后根据定时器判定同步报文的有效性。如果在有效时间范围内接收同步报文则重新开启定时器后转S4,如果超出有效时间范围则重载定时器继续计时后转S6;Step S3, after receiving the synchronization message, all nodes determine the validity of the synchronization message according to the timer. If the synchronous message is received within the effective time range, turn to S4 after re-opening the timer, and if it exceeds the effective time range, then continue to time the reload timer and turn to S6;
步骤S4,需要发送数据的节点使用Tinvalid计算数据的安全层,数据打包好后进行发送;Step S4, the node that needs to send data uses Tinvalid to calculate the security layer of the data, and sends the data after it is packaged;
步骤S5,接收数据的节点使用Tinvalid校验数据的安全层,校验通过数据有效,校验不通过丢弃本次数据;Step S5, the node receiving the data uses Tinvalid to verify the security layer of the data, the data is valid if the verification is passed, and the data is discarded if the verification is not passed;
步骤S6,各节点重新计算预失效时间Tinvalid=Tinvalid+TSYNC=1195+60=1255;Step S6, each node recalculates the pre-invalidation time Tinvalid =Tinvalid+ TSYNC =1195+60=1255;
步骤S7,若再次收到时间戳报文转步骤S1,收到同步报文转步骤S2;Step S7, if the timestamp message is received again, go to step S1, and if the synchronization message is received, go to step S2;
以上是关于方法实施例的介绍,以下通过电子设备和储存介质实施例,对本发明所述方案进行进一步说明。The above is the introduction of the method embodiments, and the solution of the present invention will be further described below through the embodiments of the electronic device and the storage medium.
本发明电子设备包括中央处理单元(CPU),其可以根据存储在只读存储器(ROM)中的计算机程序指令或者从存储单元加载到随机访问存储器(RAM)中的计算机程序指令,来执行各种适当的动作和处理。在RAM中,还可以存储设备操作所需的各种程序和数据。CPU、ROM以及RAM通过总线彼此相连。输入/输出(I/O)接口也连接至总线。The electronic device of the present invention includes a central processing unit (CPU), which can execute various Appropriate action and handling. In RAM, various programs and data necessary for device operation can also be stored. The CPU, ROM, and RAM are connected to each other through a bus. Input/output (I/O) interfaces are also connected to the bus.
设备中的多个部件连接至I/O接口,包括:输入单元,例如键盘、鼠标等;输出单元,例如各种类型的显示器、扬声器等;存储单元,例如磁盘、光盘等;以及通信单元,例如网卡、调制解调器、无线通信收发机等。通信单元允许设备通过诸如因特网的计算机网络和/或各种电信网络与其他设备交换信息/数据。Multiple components in the device are connected to the I/O interface, including: input units, such as keyboards, mice, etc.; output units, such as various types of displays, speakers, etc.; storage units, such as magnetic disks, optical discs, etc.; and communication units, Such as network card, modem, wireless communication transceiver, etc. The communication unit allows the device to exchange information/data with other devices over a computer network such as the Internet and/or various telecommunication networks.
处理单元执行上文所描述的各个方法和处理,例如本发明方法。例如,在一些实施例中,本发明方法可被实现为计算机软件程序,其被有形地包含于机器可读介质,例如存储单元。在一些实施例中,计算机程序的部分或者全部可以经由ROM和/或通信单元而被载入和/或安装到设备上。当计算机程序加载到RAM并由CPU执行时,可以执行上文描述的本发明方法的一个或多个步骤。备选地,在其他实施例中,CPU可以通过其他任何适当的方式(例如,借助于固件)而被配置为执行本发明方法。The processing unit executes the various methods and processes described above, such as the method of the present invention. For example, in some embodiments, the inventive method can be implemented as a computer software program tangibly embodied on a machine-readable medium, such as a storage unit. In some embodiments, part or all of the computer program may be loaded and/or installed on the device via a ROM and/or a communication unit. One or more steps of the inventive method described above may be performed when the computer program is loaded into RAM and executed by the CPU. Alternatively, in other embodiments, the CPU may be configured to perform the method of the present invention in any other suitable manner (eg, by means of firmware).
本文中以上描述的功能可以至少部分地由一个或多个硬件逻辑部件来执行。例如,非限制性地,可以使用的示范类型的硬件逻辑部件包括:现场可编程门阵列(FPGA)、专用集成电路(ASIC)、专用标准产品(ASSP)、片上系统(SOC)、复杂可编程逻辑设备(CPLD)等等。The functions described herein above may be performed at least in part by one or more hardware logic components. For example, without limitation, exemplary types of hardware logic components that may be used include: Field Programmable Gate Arrays (FPGAs), Application Specific Integrated Circuits (ASICs), Application Specific Standard Products (ASSPs), System on Chips (SOCs), Complex Programmable Logical device (CPLD) and so on.
用于实施本发明的方法的程序代码可以采用一个或多个编程语言的任何组合来编写。这些程序代码可以提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器或控制器,使得程序代码当由处理器或控制器执行时使流程图和/或框图中所规定的功能/操作被实施。程序代码可以完全在机器上执行、部分地在机器上执行,作为独立软件包部分地在机器上执行且部分地在远程机器上执行或完全在远程机器或服务器上执行。Program codes for implementing the methods of the present invention may be written in any combination of one or more programming languages. These program codes may be provided to a processor or controller of a general-purpose computer, a special purpose computer, or other programmable data processing devices, so that the program codes, when executed by the processor or controller, make the functions/functions specified in the flow diagrams and/or block diagrams Action is implemented. The program code may execute entirely on the machine, partly on the machine, as a stand-alone software package partly on the machine and partly on a remote machine or entirely on the remote machine or server.
在本发明的上下文中,机器可读介质可以是有形的介质,其可以包含或存储以供指令执行系统、装置或设备使用或与指令执行系统、装置或设备结合地使用的程序。机器可读介质可以是机器可读信号介质或机器可读储存介质。机器可读介质可以包括但不限于电子的、磁性的、光学的、电磁的、红外的、或半导体系统、装置或设备,或者上述内容的任何合适组合。机器可读存储介质的更具体示例会包括基于一个或多个线的电气连接、便携式计算机盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦除可编程只读存储器(EPROM或快闪存储器)、光纤、便捷式紧凑盘只读存储器(CD-ROM)、光学储存设备、磁储存设备、或上述内容的任何合适组合。In the context of the present invention, a machine-readable medium may be a tangible medium that may contain or store a program for use by or in conjunction with an instruction execution system, apparatus, or device. A machine-readable medium may be a machine-readable signal medium or a machine-readable storage medium. A machine-readable medium may include, but is not limited to, electronic, magnetic, optical, electromagnetic, infrared, or semiconductor systems, apparatus, or devices, or any suitable combination of the foregoing. More specific examples of machine-readable storage media would include one or more wire-based electrical connections, portable computer discs, hard drives, random access memory (RAM), read only memory (ROM), erasable programmable read only memory (EPROM or flash memory), optical fiber, compact disk read only memory (CD-ROM), optical storage, magnetic storage, or any suitable combination of the foregoing.
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。The above is only a specific embodiment of the present invention, but the protection scope of the present invention is not limited thereto. Any person familiar with the technical field can easily think of various equivalents within the technical scope disclosed in the present invention. Modifications or replacements shall all fall within the protection scope of the present invention. Therefore, the protection scope of the present invention should be based on the protection scope of the claims.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211626059.2ACN116155639B (en) | 2022-12-15 | 2022-12-15 | CANOPEN protocol-based driving and mining data interaction method, equipment and medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211626059.2ACN116155639B (en) | 2022-12-15 | 2022-12-15 | CANOPEN protocol-based driving and mining data interaction method, equipment and medium |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN116155639Atrue CN116155639A (en) | 2023-05-23 |
| CN116155639B CN116155639B (en) | 2025-09-02 |
Family
ID=86357431
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211626059.2AActiveCN116155639B (en) | 2022-12-15 | 2022-12-15 | CANOPEN protocol-based driving and mining data interaction method, equipment and medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116155639B (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008101394A1 (en)* | 2007-02-13 | 2008-08-28 | Shan Dong University | Real-time synchronous method and synchronous network based on the standard ethernet |
| CN112383457A (en)* | 2020-09-23 | 2021-02-19 | 卡斯柯信号有限公司 | Safety slave station system based on CANopen protocol |
| CN112527708A (en)* | 2020-12-07 | 2021-03-19 | 上海智能制造功能平台有限公司 | Device and method for realizing universal servo drive bus interface |
| CN114124616A (en)* | 2022-01-25 | 2022-03-01 | 浙江中控研究院有限公司 | Clock synchronization optimization method based on EPA bus structure |
| CN115242343A (en)* | 2022-07-21 | 2022-10-25 | 欧瑞传动电气股份有限公司 | Control method for EtherMAC digital signal coupling time stamp |
- 2022
- 2022-12-15CNCN202211626059.2Apatent/CN116155639B/enactiveActive
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008101394A1 (en)* | 2007-02-13 | 2008-08-28 | Shan Dong University | Real-time synchronous method and synchronous network based on the standard ethernet |
| CN112383457A (en)* | 2020-09-23 | 2021-02-19 | 卡斯柯信号有限公司 | Safety slave station system based on CANopen protocol |
| CN112527708A (en)* | 2020-12-07 | 2021-03-19 | 上海智能制造功能平台有限公司 | Device and method for realizing universal servo drive bus interface |
| CN114124616A (en)* | 2022-01-25 | 2022-03-01 | 浙江中控研究院有限公司 | Clock synchronization optimization method based on EPA bus structure |
| CN115242343A (en)* | 2022-07-21 | 2022-10-25 | 欧瑞传动电气股份有限公司 | Control method for EtherMAC digital signal coupling time stamp |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116155639B (en) | 2025-09-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8868960B2 (en) | Synchronous clock stop in a multi nodal computer system | |
| CN108279597A (en) | A kind of computer interlocking platform courses method based on finite state machine | |
| CN104821870A (en) | Master station smart power grid scheduling technology support system-based clock synchronization method | |
| CN108259227A (en) | A kind of method of data synchronization of two-node cluster hot backup interlock system | |
| CN108282243A (en) | A kind of clock source guaranteed reliability's mechanism suitable for master-slave mode method for synchronizing time | |
| WO2013044281A1 (en) | Method for a clock-rate correction in a network consisting of nodes | |
| Steiner et al. | The TTEthernet synchronisation protocols and their formal verification | |
| CN100468260C (en) | The Method of Realizing the Record Synchronization of Working Master Station and Standby Master Station | |
| CN109194555B (en) | An Improved Small Satellite Data Transmission Subsystem Bus Scheduling System | |
| CN112398711B (en) | CAN bus communication method for safety computer | |
| US12309170B2 (en) | Communication method based on dual channels and RSSP-I, apparatus, electronic device and storage medium | |
| CN116155639A (en) | Drive and mining data interaction method, device and medium based on CANOPEN protocol | |
| CN114019785A (en) | Data synchronization method, system, equipment and medium for multiple redundancy system | |
| CN117938291A (en) | Synchronous system and method based on two-in-two system, electronic equipment and storage medium | |
| Steiner et al. | Layered diagnosis and clock-rate correction for the ttethernet clock synchronization protocol | |
| US7802150B2 (en) | Ensuring maximum reaction times in complex or distributed safe and/or nonsafe systems | |
| JP2002252660A (en) | Serial data communication device and communication error detection method | |
| JP2021082027A (en) | Safety controller | |
| CN116373945A (en) | Synchronous operation method of main and standby vehicle control units and vehicle control unit | |
| CN115632754A (en) | Triple-mode redundant clock synchronization device, method, electronic device and storage medium | |
| EP2761795B1 (en) | Method for diagnosis of failures in a network | |
| CN116436765A (en) | Security platform data synchronization method, device and medium based on two times two out of two | |
| Malekpour | A self-stabilizing hybrid fault-tolerant synchronization protocol | |
| CN120583104B (en) | High-robustness data real-time synchronization method, system, storage medium and electronic equipment | |
| CN113534887B (en) | Method and device for time synchronization between boards based on real-time bus and electronic equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant |