CN116148850B - A method, system and storage medium for long-distance human respiratory signal detection - Google Patents
A method, system and storage medium for long-distance human respiratory signal detectionDownload PDFInfo
- Publication number
- CN116148850B CN116148850BCN202310438788.3ACN202310438788ACN116148850BCN 116148850 BCN116148850 BCN 116148850BCN 202310438788 ACN202310438788 ACN 202310438788ACN 116148850 BCN116148850 BCN 116148850B
- Authority
- CN
- China
- Prior art keywords
- carrier frequencies
- time domain
- frequency
- different carrier
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514detection methodMethods0.000titleclaimsabstractdescription154
- 238000000034methodMethods0.000titleclaimsabstractdescription98
- 230000000241respiratory effectEffects0.000titleclaimsabstractdescription9
- 238000002592echocardiographyMethods0.000claimsabstractdescription67
- 230000029058respiratory gaseous exchangeEffects0.000claimsabstractdescription50
- 238000004458analytical methodMethods0.000claimsabstractdescription21
- 230000000737periodic effectEffects0.000claimsabstractdescription21
- 230000003595spectral effectEffects0.000claimsabstractdescription8
- 238000001228spectrumMethods0.000claimsdescription122
- 230000006870functionEffects0.000claimsdescription85
- 125000004122cyclic groupChemical group0.000claimsdescription19
- 238000000354decomposition reactionMethods0.000claimsdescription19
- 238000004590computer programMethods0.000claimsdescription12
- 230000004044responseEffects0.000claimsdescription12
- 230000033001locomotionEffects0.000claimsdescription10
- 230000007613environmental effectEffects0.000claimsdescription7
- 238000007781pre-processingMethods0.000claimsdescription3
- 230000000694effectsEffects0.000abstract1
- 230000008569processEffects0.000description51
- 238000010586diagramMethods0.000description20
- 230000008859changeEffects0.000description9
- 238000005311autocorrelation functionMethods0.000description4
- 238000012545processingMethods0.000description4
- 239000011159matrix materialSubstances0.000description3
- 238000004364calculation methodMethods0.000description2
- 238000005314correlation functionMethods0.000description2
- 238000012986modificationMethods0.000description2
- 230000004048modificationEffects0.000description2
- 230000005654stationary processEffects0.000description2
- 238000006467substitution reactionMethods0.000description2
- 101000827703Homo sapiens Polyphosphoinositide phosphataseProteins0.000description1
- 102100023591Polyphosphoinositide phosphataseHuman genes0.000description1
- 108010076504Protein Sorting SignalsProteins0.000description1
- 101100012902Saccharomyces cerevisiae (strain ATCC 204508 / S288c) FIG2 geneProteins0.000description1
- 101100233916Saccharomyces cerevisiae (strain ATCC 204508 / S288c) KAR5 geneProteins0.000description1
- 238000009825accumulationMethods0.000description1
- 230000009286beneficial effectEffects0.000description1
- 230000005540biological transmissionEffects0.000description1
- 230000000903blocking effectEffects0.000description1
- 230000035565breathing frequencyEffects0.000description1
- 230000002612cardiopulmonary effectEffects0.000description1
- 238000006243chemical reactionMethods0.000description1
- 238000006073displacement reactionMethods0.000description1
- 238000005516engineering processMethods0.000description1
- 238000001914filtrationMethods0.000description1
- 230000001121heart beat frequencyEffects0.000description1
- 239000002184metalSubstances0.000description1
- 238000002156mixingMethods0.000description1
- 238000000819phase cycleMethods0.000description1
- 238000011160researchMethods0.000description1
- 230000036387respiratory rateEffects0.000description1
- 238000005070samplingMethods0.000description1
- 230000006641stabilisationEffects0.000description1
- 238000011105stabilizationMethods0.000description1
- 238000012360testing methodMethods0.000description1
Images




















Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Measuring devices for evaluating the respiratory organs
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/04—Systems determining presence of a target
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A90/00—Technologies having an indirect contribution to adaptation to climate change
- Y02A90/10—Information and communication technologies [ICT] supporting adaptation to climate change, e.g. for weather forecasting or climate simulation
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Physiology (AREA)
- Medical Informatics (AREA)
- Pulmonology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域Technical Field
本发明设计雷达信号处理技术领域,具体是涉及到一种远距离人体呼吸信号检测的方法、系统及存储介质。The present invention relates to the field of radar signal processing technology, and specifically to a method, system and storage medium for long-distance human breathing signal detection.
背景技术Background Art
基于雷达探测的人体生命体征信号检测是雷达信号处理领域一个重要的研究方向。自20世纪70年代初以来,连续波(Continuous-wave,CW)多普勒雷达已广泛用于地震废墟下的受害者搜索。它发射单调CW信号,解调反射波的相位变化,以获得人体目标的呼吸和心跳频率。这是因为反射波的相位变化与心肺活动引起的胸部位移成线性比例。该雷达结构简单,距离分辨率受限。The detection of human vital signs based on radar detection is an important research direction in the field of radar signal processing. Since the early 1970s, continuous-wave (CW) Doppler radar has been widely used to search for victims under earthquake rubble. It transmits a monotonous CW signal and demodulates the phase change of the reflected wave to obtain the breathing and heartbeat frequency of the human target. This is because the phase change of the reflected wave is linearly proportional to the chest displacement caused by cardiopulmonary activity. The radar has a simple structure and limited range resolution.
为了提供准确的距离信息和生命体征估计,还提出了线性调频连续波(LinearFrequency Modulated Continuous Wave,LFMCW)雷达、步进频率连续波(Step FrequencyContinuous Wave,SFCW)雷达和脉冲无线电超宽带(Impulse Radio UWB,IR-UWB)雷达。LFMCW雷达和SFCW雷达分别发射线性调频连续波和步进频率连续波,然后沿记录时间轴检测回波信号的频率/相位变化和相应的变化历史,以获得人体的距离和生命体征信息。然而,它们的信号发生器要求低相位噪声、快速稳定时间和精确频率控制,因此雷达结构复杂,成本和功耗高。而脉冲无线电超宽带雷达则是发射一个超短脉冲,然后通过检测反射脉冲的飞行时间(time-of-flight,TOF)以及沿记录时间轴的相应TOF变化来获取距离信息和生命体征估计。In order to provide accurate distance information and vital sign estimation, linear frequency modulated continuous wave (LFMCW) radar, step frequency continuous wave (SFCW) radar and impulse radio UWB (IR-UWB) radar are also proposed. LFMCW radar and SFCW radar transmit linear frequency modulated continuous wave and step frequency continuous wave respectively, and then detect the frequency/phase change and corresponding change history of the echo signal along the recording time axis to obtain the distance and vital sign information of the human body. However, their signal generators require low phase noise, fast stabilization time and precise frequency control, so the radar structure is complex, cost and power consumption are high. Impulse radio UWB radar transmits an ultrashort pulse, and then obtains distance information and vital sign estimation by detecting the time-of-flight (TOF) of the reflected pulse and the corresponding TOF change along the recording time axis.
由于上述方法只能传输不太强的信号能量级别,从而会降低信噪比(Signal-to-noise ratio,SNR),进而降低检测精度。此外,上述方法还容易受到噪声和射频干扰(RadioFrequency Interference,RFI)的影响。因此,上述方法仅适用于近距离的人体呼吸信号探测,如地震废墟中的人员探测、婴儿或老人卧床时的呼吸检测等。在百米量级的远距离人员检测场合,如安防中的人员潜伏探测,雷达的发射和接收的传播路径变得复杂,传播路径中存在树丛晃动、弱遮挡物体的影响、人体自身的运动或微动等,在这种情况下对人体呼吸信号探测,难度增大,若采用上述方法进行探测,精度较低。Since the above method can only transmit a signal energy level that is not very strong, the signal-to-noise ratio (SNR) will be reduced, thereby reducing the detection accuracy. In addition, the above method is also susceptible to noise and radio frequency interference (RFI). Therefore, the above method is only suitable for close-range human breathing signal detection, such as personnel detection in earthquake ruins, breathing detection of infants or elderly people in bed, etc. In long-distance personnel detection occasions of the order of hundreds of meters, such as personnel lurking detection in security, the transmission and reception propagation paths of the radar become complicated, and there are swaying trees, the influence of weak blocking objects, and the movement or micro-movement of the human body in the propagation path. In this case, the detection of human breathing signals becomes more difficult. If the above method is used for detection, the accuracy is low.
发明内容Summary of the invention
本发明提供一种远距离人体呼吸信号检测的方法、系统及存储介质,以解决远距离人体呼吸信号探测难度较大、精度较低的问题。The present invention provides a method, system and storage medium for long-distance human breathing signal detection, so as to solve the problem that long-distance human breathing signal detection is difficult and has low accuracy.
第一方面,本发明提供一种远距离人体呼吸信号检测的方法,该方法包括如下步骤:In a first aspect, the present invention provides a method for long-distance human breathing signal detection, the method comprising the following steps:
基于多个不同的载频并通过目标雷达向目标物体发射多次探测波;Based on multiple different carrier frequencies, multiple detection waves are emitted to the target object through the target radar;
分别接收不同载频下多次所述探测波经所述目标物体反射的散射回波;Receiving scattered echoes of the detection waves reflected by the target object multiple times at different carrier frequencies;
基于多个所述散射回波获取对应载频下的多个时域回波,并将多个所述时域回波组成为对应载频下的时域回波记录剖面;Acquire multiple time domain echoes at corresponding carrier frequencies based on the multiple scattered echoes, and combine the multiple time domain echoes into a time domain echo recording profile at the corresponding carrier frequency;
分别对不同载频下所述时域回波记录剖面中的所述时域回波进行预处理,并根据所述时域回波记录剖面计算生成所述时域回波的一维距离像;Preprocessing the time domain echoes in the time domain echo recording sections at different carrier frequencies respectively, and calculating and generating a one-dimensional range image of the time domain echo according to the time domain echo recording sections;
选取所述一维距离像中具有周期性变化的距离区间;Selecting a distance interval with periodic changes in the one-dimensional range image;
对不同载频下处于所述距离区间内的每个所述时域回波进行第一FFT频谱特征分析,得到不同载频下的第一频谱特征;Performing a first FFT spectrum feature analysis on each of the time domain echoes in the distance interval at different carrier frequencies to obtain first spectrum features at different carrier frequencies;
判断不同载频下的所述第一频谱特征是否相同;Determining whether the first frequency spectrum characteristics at different carrier frequencies are the same;
若不同载频下的所述第一频谱特征相同,则判定所述散射回波中存在呼吸信号。If the first frequency spectrum features at different carrier frequencies are the same, it is determined that a breathing signal exists in the scattered echo.
可选的,所述基于多个所述散射回波获取对应载频下的多个时域回波,并将多个所述时域回波组成为对应载频下的时域回波记录剖面包括如下步骤:Optionally, the acquiring of a plurality of time domain echoes at corresponding carrier frequencies based on the plurality of scattered echoes, and combining the plurality of time domain echoes into a time domain echo recording profile at corresponding carrier frequencies comprises the following steps:
根据预设的多个频点获取每个所述频点处所述散射回波相对于所述探测波的幅度和相位,得到多个所述频点对应的频率响应序列;According to a plurality of preset frequency points, the amplitude and phase of the scattered echo relative to the detection wave at each frequency point are acquired to obtain a frequency response sequence corresponding to the plurality of frequency points;
将所述频率响应序列转换至时域,得到单个所述散射回波对应的时域回波;Converting the frequency response sequence into the time domain to obtain a time domain echo corresponding to a single scattered echo;
将同一载频下所有所述散射回波对应的时域回波组成为时域回波记录剖面。The time domain echoes corresponding to all the scattered echoes under the same carrier frequency are combined into a time domain echo recording profile.
可选的,所述方法还包括如下步骤:Optionally, the method further comprises the following steps:
若不同载频下的多个所述第一频谱特征不相同,则通过经验模态分解方法分别对不同载频下处于所述距离区间内的每个所述时域回波进行分解,得到不同载频下的多个本征模态函数;If the first frequency spectrum features of the plurality of carrier frequencies are different, each of the time domain echoes in the distance interval at different carrier frequencies is decomposed by an empirical mode decomposition method to obtain a plurality of intrinsic mode functions at different carrier frequencies;
从不同载频下的多个所述本征模态函数中根据预设的频率范围选取多个目标本征模态函数,并将多个所述目标本征模态函数相加,得到不同载频下的叠加波形;Selecting a plurality of target intrinsic mode functions from the plurality of intrinsic mode functions at different carrier frequencies according to a preset frequency range, and adding the plurality of target intrinsic mode functions to obtain a superimposed waveform at different carrier frequencies;
对不同载频下的所述叠加波形进行第二FFT频谱特征分析,得到不同载频下的第二频谱特征;Performing a second FFT spectrum characteristic analysis on the superimposed waveforms at different carrier frequencies to obtain second spectrum characteristics at different carrier frequencies;
判断不同载频下的所述第二频谱特征是否相同;Determining whether the second frequency spectrum characteristics at different carrier frequencies are the same;
若不同载频下的所述第二频谱特征相同,则判定所述散射回波中存在所述呼吸信号。If the second frequency spectrum features at different carrier frequencies are the same, it is determined that the breathing signal exists in the scattered echo.
可选的,所述方法还包括如下步骤:Optionally, the method further comprises the following steps:
若不同载频下的所述第二频谱特征不相同,则将不同载频下的所述叠加波形进行循环互相关谱运算,得到不同载频下的多个切片频谱;If the second spectrum characteristics at different carrier frequencies are different, performing a cyclic cross-correlation spectrum operation on the superimposed waveforms at different carrier frequencies to obtain a plurality of slice spectrums at different carrier frequencies;
分别从不同载频下的多个所述切片频谱中选取能量最大的所述切片频谱作为目标切片频谱;Selecting the slice spectrum with the largest energy from the plurality of slice spectrums at different carrier frequencies as the target slice spectrum;
对不同载频下的所述目标切片频谱进行第三FFT频谱特征分析,得到不同载频下的第三频谱特征;Performing a third FFT spectrum feature analysis on the target slice spectrum at different carrier frequencies to obtain third spectrum features at different carrier frequencies;
判断不同载频下的所述第三频谱特征是否相等或是否存在倍频关系;Determining whether the third frequency spectrum characteristics at different carrier frequencies are equal or whether there is a frequency doubling relationship;
若不同载频下的所述第三频谱特征相等或存在倍频关系,则判定所述散射回波中存在所述呼吸信号;If the third frequency spectrum features at different carrier frequencies are equal or have a frequency doubling relationship, it is determined that the respiratory signal exists in the scattered echo;
若不同载频下的所述第三频谱特征不相等且不存在倍频关系,则判定所述散射回波中不存在所述呼吸信号。If the third frequency spectrum features at different carrier frequencies are not equal and do not have a frequency doubling relationship, it is determined that the respiratory signal does not exist in the scattered echo.
可选的,所述通过经验模态分解方法分别对不同载频下处于所述距离区间内的每个所述时域回波进行分解,得到不同载频下的多个本征模态函数包括如下步骤:Optionally, the step of decomposing each of the time domain echoes in the distance interval at different carrier frequencies by an empirical mode decomposition method to obtain a plurality of intrinsic mode functions at different carrier frequencies comprises the following steps:
将所述时域回波作为目标信号,并获取所述目标信号的极大值点和极小值点;Taking the time domain echo as a target signal, and obtaining a maximum value point and a minimum value point of the target signal;
基于所述极大值点拟合出极大值包络线,并基于所述极小值点拟合出极小值包络线;Fitting a maximum envelope based on the maximum value point, and fitting a minimum envelope based on the minimum value point;
根据所述极大值包络线和所述极小值包络线计算得到所述时域回波的均值包络;Calculating the mean envelope of the time domain echo according to the maximum envelope and the minimum envelope;
将所述目标信号减去所述均值包络,得到备选信号;Subtract the mean envelope from the target signal to obtain an alternative signal;
判断所述备选信号是否为所述时域回波的本征模态函数分量;Determining whether the candidate signal is an intrinsic mode function component of the time domain echo;
若所述备选信号不为所述时域回波的本征模态函数分量,则将所述备选信号作为所述目标信号,并重复获取所述目标信号的极值点以获取新备选信号,直至所述新备选信号为所述时域回波的本征模态函数分量;If the candidate signal is not an intrinsic mode function component of the time domain echo, the candidate signal is used as the target signal, and the extreme value points of the target signal are repeatedly obtained to obtain a new candidate signal until the new candidate signal is an intrinsic mode function component of the time domain echo;
将所述本征模态函数分量作为所述目标信号,重复获取所述目标信号的极值点以获取所述时域回波多阶的本征模态函数分量,直至任意一阶的本征模态函数余量或所述本征模态函数分量小于预设的分解阈值;Taking the intrinsic mode function component as the target signal, repeatedly obtaining the extreme value points of the target signal to obtain the intrinsic mode function components of multiple orders of the time domain echo, until the intrinsic mode function residual of any order or the intrinsic mode function component is less than a preset decomposition threshold;
或,or,
直至任意一阶的所述本征模态函数余量为单调函数或常量。The residual of the intrinsic mode function up to any order is a monotonic function or a constant.
可选的,所述方法还包括如下步骤:Optionally, the method further comprises the following steps:
若所述备选信号为所述时域回波的本征模态函数分量,则将所述本征模态函数分量作为所述目标信号,重复获取所述目标信号的极值点以获取所述时域回波多阶的本征模态函数分量,直至任意一阶的本征模态函数余量或所述本征模态函数分量小于所述分解阈值;If the candidate signal is an intrinsic mode function component of the time domain echo, the intrinsic mode function component is used as the target signal, and the extreme value points of the target signal are repeatedly obtained to obtain the intrinsic mode function components of multiple orders of the time domain echo, until the intrinsic mode function residual of any order or the intrinsic mode function component is less than the decomposition threshold;
或,or,
直至任意一阶的所述本征模态函数余量为单调函数或常量。The residual of the intrinsic mode function up to any order is a monotonic function or a constant.
可选的,所述散射回波包括基于物体运动所产生的多普勒信号、基于人体呼吸和心跳所产生的微多普勒信号以及环境杂波信号。Optionally, the scattered echo includes a Doppler signal generated based on object movement, a micro-Doppler signal generated based on human breathing and heartbeat, and an environmental clutter signal.
可选的,所述散射回波表示为:Optionally, the scattered echo is expressed as:

式中:











第二方面,本发明还提供一种远距离人体呼吸信号检测的系统,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面中所述的方法。In a second aspect, the present invention also provides a system for long-distance human breathing signal detection, comprising a memory, a processor, and a computer program stored in the memory and executable on the processor, wherein the processor implements the method described in the first aspect when executing the computer program.
第三方面,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面中所述的方法的步骤。In a third aspect, the present invention further provides a computer-readable storage medium having a computer program stored thereon, wherein the computer program, when executed by a processor, implements the steps of the method described in the first aspect.
本发明的有益效果是:The beneficial effects of the present invention are:
本发明所提供的一种远距离人体呼吸信号检测的方法包括如下步骤:基于多个不同的载频并通过目标雷达向目标物体发射多次探测波;分别接收不同载频下多次所述探测波经所述目标物体反射的散射回波;基于多个所述散射回波获取对应载频下的多个时域回波,并将多个所述时域回波组成为对应载频下的时域回波记录剖面;分别对不同载频下所述时域回波记录剖面中的所述时域回波进行预处理,并根据所述时域回波记录剖面计算生成所述时域回波的一维距离像;由于人体呼吸属于一种周期性变化,因此选取所述一维距离像中具有周期性变化的距离区间;对不同载频下处于所述距离区间内的每个所述时域回波进行第一FFT频谱特征分析,得到不同载频下的第一频谱特征;判断不同载频下的所述第一频谱特征是否相同;若不同载频下的所述第一频谱特征相同,则判定所述散射回波中存在呼吸信号。通过上述方法可以在远距离且具有干扰的情况下探测到人体呼吸信号。The method for detecting a long-distance human breathing signal provided by the present invention comprises the following steps: based on multiple different carrier frequencies, multiple detection waves are transmitted to a target object through a target radar; scattered echoes reflected by the target object from multiple detection waves at different carrier frequencies are respectively received; multiple time domain echoes at corresponding carrier frequencies are obtained based on multiple scattered echoes, and multiple time domain echoes are composed into a time domain echo recording profile at corresponding carrier frequencies; the time domain echoes in the time domain echo recording profiles at different carrier frequencies are preprocessed respectively, and a one-dimensional distance image of the time domain echo is calculated and generated according to the time domain echo recording profile; since human breathing is a periodic change, a distance interval with periodic changes in the one-dimensional distance image is selected; a first FFT spectrum feature analysis is performed on each time domain echo in the distance interval at different carrier frequencies to obtain the first spectrum feature at different carrier frequencies; whether the first spectrum feature at different carrier frequencies is the same; if the first spectrum feature at different carrier frequencies is the same, it is determined that there is a breathing signal in the scattered echo. The above method can detect human breathing signals at a long distance and under interference.
附图说明BRIEF DESCRIPTION OF THE DRAWINGS
图1为远距离人体呼吸信号检测的方法的流程示意图。FIG. 1 is a flow chart of a method for long-distance human breathing signal detection.
图2为110m模拟器密遮挡状态下10G频率探测波探测过程的一维距离像示意图。FIG2 is a schematic diagram of a one-dimensional range image of the detection process of a 10G frequency detection wave under dense occlusion of a 110m simulator.
图3为110m模拟器密遮挡状态下10G频率探测波探测过程的时域回波示意图。FIG3 is a schematic diagram of the time domain echo of the 10G frequency detection wave detection process under the dense shielding state of the 110m simulator.
图4为110m模拟器密遮挡状态下10G频率探测波探测过程的时域回波FFT示意图。FIG4 is a schematic diagram of the time domain echo FFT of the 10G frequency detection wave detection process under the dense shielding state of the 110m simulator.
图5为110m模拟器密遮挡状态下10G频率探测波探测过程的IMF信号FFT示意图。FIG5 is a schematic diagram of the IMF signal FFT of the 10G frequency detection wave detection process under the dense shielding state of the 110m simulator.
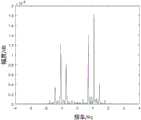
图6为110m模拟器密遮挡状态下10G频率探测波探测过程的目标切片频谱FFT示意图。FIG6 is a schematic diagram of the target slice spectrum FFT of the detection process of the 10G frequency detection wave under the dense occlusion state of the 110m simulator.
图7为110m模拟器密遮挡状态下8.5G频率探测波探测过程的一维距离像示意图。FIG7 is a schematic diagram of a one-dimensional range image of the detection process of the 8.5 GHz frequency detection wave under dense occlusion of the 110 m simulator.
图8为110m模拟器密遮挡状态下8.5G频率探测波探测过程的时域回波示意图。FIG8 is a schematic diagram of the time domain echo of the 8.5G frequency detection wave detection process under the dense shielding state of the 110m simulator.
图9为110m模拟器密遮挡状态下8.5G频率探测波探测过程的时域回波FFT示意图。FIG9 is a schematic diagram of the time domain echo FFT of the 8.5G frequency detection wave detection process under the dense shielding state of the 110m simulator.
图10为110m模拟器密遮挡状态下8.5G频率探测波探测过程的IMF信号FFT示意图。FIG10 is a schematic diagram of the IMF signal FFT of the 8.5 GHz frequency detection wave detection process under dense occlusion of the 110 m simulator.
图11为110m模拟器密遮挡状态下8.5G频率探测波探测过程的目标切片频谱FFT示意图。FIG11 is a schematic diagram of the target slice spectrum FFT of the detection process of the 8.5 GHz frequency detection wave under the dense occlusion state of the 110 m simulator.
图12为110m目标人员密遮挡状态下10G频率探测波探测过程的一维距离像示意图。FIG12 is a schematic diagram of a one-dimensional range image of the detection process of a 10G frequency detection wave under dense obstruction of a target person at 110 m.
图13为110m目标人员密遮挡状态下10G频率探测波探测过程的时域回波示意图。FIG13 is a schematic diagram of the time domain echo of the 10G frequency detection wave detection process under the condition of dense obstruction of the target personnel at 110 m.
图14为110m目标人员密遮挡状态下10G频率探测波探测过程的时域回波FFT示意图。FIG14 is a time domain echo FFT schematic diagram of the 10G frequency detection wave detection process under the condition of dense obstruction of the target personnel at 110 m.
图15为110m目标人员密遮挡状态下10G频率探测波探测过程的IMF信号FFT示意图。FIG15 is a schematic diagram of the IMF signal FFT of the 10G frequency detection wave detection process under the condition of dense obstruction of the target personnel at 110 m.
图16为110m目标人员密遮挡状态下10G频率探测波探测过程的目标切片频谱FFT示意图。FIG16 is a schematic diagram of the target slice spectrum FFT of the detection process of the 10G frequency detection wave under the condition of dense obstruction of the target personnel at 110 m.
图17为110m目标人员密遮挡状态下8.5G频率探测波探测过程的一维距离像示意图。FIG17 is a schematic diagram of a one-dimensional range image of the detection process of the 8.5G frequency detection wave under dense obstruction of the target personnel at 110 m.
图18为110m目标人员密遮挡状态下8.5G频率探测波探测过程的时域回波示意图。FIG18 is a schematic diagram of the time domain echo of the 8.5G frequency detection wave detection process under the condition of dense obstruction of the target personnel at 110 m.
图19为110m目标人员密遮挡状态下8.5G频率探测波探测过程的时域回波FFT示意图。FIG19 is a schematic diagram of the time domain echo FFT of the 8.5G frequency detection wave detection process under the condition of dense obstruction of the target personnel at 110 m.
图20为110m目标人员密遮挡状态下8.5G频率探测波探测过程的IMF信号FFT示意图。FIG20 is a schematic diagram of the IMF signal FFT of the 8.5G frequency detection wave detection process under the condition of dense obstruction of target personnel at 110 m.
图21为110m目标人员密遮挡状态下8.5G频率探测波探测过程的目标切片频谱FFT示意图。FIG21 is a schematic diagram of the target slice spectrum FFT of the 8.5G frequency detection wave detection process under the condition of dense obstruction of the target personnel at 110 m.
具体实施方式DETAILED DESCRIPTION
本发明公开一种远距离人体呼吸信号检测的方法。The invention discloses a method for long-distance human body breathing signal detection.
在其中一种实施方式中,参照图1,远距离人体呼吸信号检测的方法具体包括如下步骤:In one embodiment, referring to FIG. 1 , the method for long-distance human breathing signal detection specifically includes the following steps:
S101.基于多个不同的载频并通过目标雷达向目标物体发射多次探测波。S101. Based on multiple different carrier frequencies, multiple detection waves are transmitted to the target object through the target radar.
其中,目标物体根据不同的场景具有不同的含义,目标物体可以是藏匿有人体的障碍物,目标物体也可以指想要探测且位于远距离的目标人体,远距离通常指大于等于100m的距离。目标雷达所设置的载频数量大于等于2,在本实施方式中,假设目标雷达所设置的载频数量为2,分别记为







对于任意载频的工作频率区间,假设频率步进间隔为

S102.分别接收不同载频下多次探测波经目标物体反射的散射回波。S102. Respectively receive scattered echoes of multiple detection waves at different carrier frequencies reflected by the target object.
其中,通过目标雷达的接收机可以接收到不同载频下多次探测波经目标物体反射的散射回波。散射回波包括基于物体运动所产生的多普勒信号、基于目标人体呼吸和心跳所产生的微多普勒信号以及环境杂波信号。物体运动包括在自然规律下自由运动的非活体物体,如晃动的灌木丛,还包括目标人体的人体运动。Among them, the receiver of the target radar can receive scattered echoes reflected by the target object from multiple detection waves at different carrier frequencies. The scattered echoes include Doppler signals generated by the movement of the object, micro-Doppler signals generated by the breathing and heartbeat of the target human body, and environmental clutter signals. Object movement includes non-living objects that move freely under natural laws, such as swaying bushes, and human body movement of the target human body.
散射回波具体表示为:The scattered echo is specifically expressed as:

式中:











在本实施方式中,主要以目标人体的呼吸信号作为检测目标,因此散射回波的信号模型可以简化为:In this embodiment, the breathing signal of the target human body is mainly used as the detection target, so the signal model of the scattered echo can be simplified as follows:

其中,
假设目标雷达的发射机发射载频













S103.基于多个散射回波获取对应载频下的多个时域回波,并将多个时域回波组成为对应载频下的时域回波记录剖面。S103. Acquire multiple time domain echoes at corresponding carrier frequencies based on multiple scattered echoes, and combine the multiple time domain echoes into a time domain echo recording profile at the corresponding carrier frequency.
其中,随着远距离人体的呼吸,目标雷达不断朝目标物体发射信号并接收散射回波。在载频对应的工作频率区间进行混频处理和时域转换处理,可以获取工作频率区间的时域回波记录剖面。Among them, as the human body breathes at a distance, the target radar continuously transmits signals to the target object and receives scattered echoes. Mixing processing and time domain conversion processing are performed in the working frequency interval corresponding to the carrier frequency, and the time domain echo record profile of the working frequency interval can be obtained.
S104.分别对不同载频下时域回波记录剖面中的时域回波进行预处理,并根据时域回波记录剖面计算生成时域回波的一维距离像。S104. Preprocess the time domain echoes in the time domain echo recording profiles at different carrier frequencies respectively, and calculate and generate a one-dimensional range image of the time domain echo according to the time domain echo recording profiles.
其中,预处理包括滤波、去噪等步骤。Among them, preprocessing includes filtering, denoising and other steps.
S105.选取一维距离像中具有周期性变化的距离区间。S105. Select a distance interval with periodic changes in the one-dimensional range image.
其中,由于人体呼吸为周期性动作,因此目标人体的呼吸信号将呈现周期性变化,所以选取一维距离像中具有周期性变化的距离区间。Since human breathing is a periodic action, the breathing signal of the target human body will show periodic changes, so the distance interval with periodic changes in the one-dimensional range image is selected.
S106.对不同载频下处于距离区间内的每个时域回波进行第一FFT频谱特征分析,得到不同载频下的第一频谱特征。S106. Perform a first FFT spectrum feature analysis on each time domain echo within the distance interval at different carrier frequencies to obtain first spectrum features at different carrier frequencies.
其中,FFT频谱特征分析为离散傅里叶变化频谱特征分析。以步骤S102具体实施方式中的举例说明进一步进行举例说明:The FFT spectrum feature analysis is a discrete Fourier transform spectrum feature analysis. The example in the specific implementation of step S102 is further described as follows:
两个散射回波


式中:

两个散射回波


因此,多普勒信号FFT后的谱峰位置和载频相关,而微多普勒信号的FFT后的谱峰位置与载频无关。Therefore, the spectrum peak position of the Doppler signal after FFT is related to the carrier frequency, while the spectrum peak position of the micro-Doppler signal after FFT is independent of the carrier frequency.
S107.判断不同载频下的第一频谱特征是否相同,若不同载频下的第一频谱特征相同,则执行步骤S108;若不同载频下的第一频谱特征不相同,则通过经验模态分解方法对不同载频下的时域回波作进一步分析。S107. Determine whether the first spectrum characteristics under different carrier frequencies are the same. If the first spectrum characteristics under different carrier frequencies are the same, execute step S108; if the first spectrum characteristics under different carrier frequencies are different, further analyze the time domain echoes under different carrier frequencies through the empirical mode decomposition method.
S108.判定散射回波中存在呼吸信号。S108. Determine whether there is a breathing signal in the scattered echo.
在其中一种实施方式中,步骤S103即基于多个散射回波获取对应载频下的多个时域回波,并将多个时域回波组成为对应载频下的时域回波记录剖面具体包括如下步骤:In one embodiment, step S103, i.e., obtaining multiple time domain echoes at corresponding carrier frequencies based on multiple scattered echoes, and combining the multiple time domain echoes into a time domain echo recording profile at corresponding carrier frequencies, specifically includes the following steps:
根据预设的多个频点获取每个频点处散射回波相对于探测波的幅度和相位,得到多个频点对应的频率响应序列;According to the preset multiple frequency points, the amplitude and phase of the scattered echo relative to the detection wave at each frequency point are obtained to obtain the frequency response sequence corresponding to the multiple frequency points;
将频率响应序列转换至时域,得到单个散射回波对应的时域回波;Convert the frequency response sequence into the time domain to obtain the time domain echo corresponding to a single scattered echo;
将同一载频下所有散射回波对应的时域回波组成为时域回波记录剖面。The time domain echoes corresponding to all scattered echoes under the same carrier frequency are combined into a time domain echo record profile.
其中,获取各个频点处散射回波相对于探测波的幅度




一个完整的探测过程为目标雷达发射机向目标物体发射探测波,探测波通过目标物体反射回散射回波并被目标雷达接收机接收。举例说明,在一个完整的探测过程中,目标物体距离目标雷达的距离为









通过重复多次完整的探测过程获取到多道时域回波,再将多道时域回波组成一个二维数字矩阵,即时域回波记录剖面。时域回波记录剖面可以表示为一个
在其中一种实施方式中,当步骤S107即判断不同载频下的第一频谱特征是否相同的判断结果为不同载频下的第一频谱特征不相同,则后续具体步骤如下:In one embodiment, when the result of step S107, i.e., determining whether the first spectrum features at different carrier frequencies are the same, is that the first spectrum features at different carrier frequencies are not the same, the subsequent specific steps are as follows:
若不同载频下的多个第一频谱特征不相同,则通过经验模态分解方法分别对不同载频下处于距离区间内的每个时域回波进行分解,得到不同载频下的多个本征模态函数;If the first frequency spectrum features at different carrier frequencies are different, each time domain echo at different carrier frequencies in the distance interval is decomposed by an empirical mode decomposition method to obtain multiple intrinsic mode functions at different carrier frequencies;
从不同载频下的多个本征模态函数中根据预设的频率范围选取多个目标本征模态函数,并将多个目标本征模态函数相加,得到不同载频下的叠加波形;Selecting a plurality of target intrinsic mode functions from a plurality of intrinsic mode functions at different carrier frequencies according to a preset frequency range, and adding the plurality of target intrinsic mode functions to obtain a superimposed waveform at different carrier frequencies;
对不同载频下的叠加波形进行第二FFT频谱特征分析,得到不同载频下的第二频谱特征;Performing a second FFT spectrum characteristic analysis on the superimposed waveforms at different carrier frequencies to obtain second spectrum characteristics at different carrier frequencies;
判断不同载频下的第二频谱特征是否相同;Determining whether second frequency spectrum characteristics at different carrier frequencies are the same;
若不同载频下的第二频谱特征相同,则判定散射回波中存在呼吸信号。If the second frequency spectrum features at different carrier frequencies are the same, it is determined that a breathing signal exists in the scattered echo.
其中,在经验模态分解(Empirical Mode Decomposition,EMD)方法中是假设任何信号都是由若干有限的本征模态函数IMF组成的。在不同载频下,呼吸信号的振动具有较强的周期性,而人体的多普勒运动在不同载频下频谱相关性较差,所以可以采用经验模态分解的处理方法提取呼吸信号的频谱。Among them, the Empirical Mode Decomposition (EMD) method assumes that any signal is composed of a number of finite intrinsic mode functions (IMFs). Under different carrier frequencies, the vibration of the respiratory signal has a strong periodicity, while the Doppler motion of the human body has a poor spectrum correlation under different carrier frequencies, so the Empirical Mode Decomposition method can be used to extract the spectrum of the respiratory signal.
在本实施方式中,若判断不同载频下的第二频谱特征是否相同的判断结果为不同载频下的第二频谱特征不相同,则具体执行如下步骤:In this implementation manner, if the result of determining whether the second frequency spectrum features at different carrier frequencies are the same is that the second frequency spectrum features at different carrier frequencies are not the same, the following steps are specifically performed:
若不同载频下的第二频谱特征不相同,则将不同载频下的叠加波形进行循环互相关谱运算,得到不同载频下的多个切片频谱;If the second spectrum characteristics at different carrier frequencies are different, a cyclic cross-correlation spectrum operation is performed on the superimposed waveforms at different carrier frequencies to obtain a plurality of slice spectrums at different carrier frequencies;
分别从不同载频下的多个切片频谱中选取能量最大的切片频谱作为目标切片频谱;Selecting a slice spectrum with the largest energy from a plurality of slice spectra under different carrier frequencies as a target slice spectrum;
对不同载频下的目标切片频谱进行第三FFT频谱特征分析,得到不同载频下的第三频谱特征;Performing a third FFT spectrum feature analysis on the target slice spectrum at different carrier frequencies to obtain third spectrum features at different carrier frequencies;
判断不同载频下的第三频谱特征是否相等或是否存在倍频关系;Determine whether the third frequency spectrum characteristics under different carrier frequencies are equal or whether there is a frequency doubling relationship;
若不同载频下的第三频谱特征相等或存在倍频关系,则判定散射回波中存在呼吸信号;If the third frequency spectrum characteristics under different carrier frequencies are equal or have a frequency doubling relationship, it is determined that there is a breathing signal in the scattered echo;
若不同载频下的第三频谱特征不相等且不存在倍频关系,则判定散射回波中不存在呼吸信号。If the third frequency spectrum features under different carrier frequencies are not equal and do not have a frequency doubling relationship, it is determined that there is no breathing signal in the scattered echo.
其中,假设零均值序列


其中,


其中,

根据CAF求得关于

假如至少存在一个基础循环频率




均值和自相关具有周期性的信号称为循环平稳信号,即信号满足如下充要条件:A signal with periodic mean and autocorrelation is called a cyclostationary signal, that is, the signal satisfies the following necessary and sufficient conditions:

其中,



自相关函数是函数本身的相关性,当函数中有周期性分量时,自相关函数的极大值能体现这种周期性。互相关就是两个函数的周期性,当两个函数具有相同周期分量时,其极大值能体现这种周期性的分量,因此可以用来提取具有周期特征的人体呼吸信号。The autocorrelation function is the correlation of the function itself. When there is a periodic component in the function, the maximum value of the autocorrelation function can reflect this periodicity. The cross-correlation is the periodicity of two functions. When two functions have the same periodic component, their maximum value can reflect this periodic component. Therefore, it can be used to extract human breathing signals with periodic characteristics.
周期函数可展开为傅里叶级数,得到:The periodic function can be expanded into a Fourier series to obtain:

其中傅里叶系数







对循环互相关做傅里叶变换得到:Taking the Fourier transform of the cyclic cross-correlation yields:




因此,在本实施方式中,基于不同载频的循环互相关谱计算检测的方法如下:Therefore, in this embodiment, the method for calculating and detecting based on the cyclic cross-correlation spectra of different carrier frequencies is as follows:
不同载频下,人体多普勒运动所产生多普勒信号的循环互相关谱为:Under different carrier frequencies, the cyclic cross-correlation spectrum of the Doppler signal generated by the Doppler motion of the human body is:

所以,多普勒信号循环互相关谱的谱峰位置为:Therefore, the peak position of the Doppler signal cyclic cross-correlation spectrum is:

频域相关可得到相同的结果。The same result can be obtained by frequency domain correlation.
在本实施方式中,不同载频下,对于人体呼吸运动的微多普勒信号,循环互相关谱为:In this implementation, under different carrier frequencies, for the micro-Doppler signal of human respiratory motion, the cyclic cross-correlation spectrum is:

所以,微多普勒信号循环互相关谱的谱峰位置为:Therefore, the peak position of the cyclic cross-correlation spectrum of the micro-Doppler signal is:

对于环境杂波信号,其循环互相关谱没有特定的规律。考虑对于含有微多普勒特征的信号,在任何载频下,其循环互相关谱的谱峰位置相对不变;对于多普勒信号而言,不同载频的互相关,或同一载频的自相关,其循环互相关谱都会发生变化。在循环互相关谱中的多个切片频谱中选取能量最大的切片频谱作为目标切片频谱,再对目标切片频谱进行第三次FFT频谱特征分析,得到不同载频下的第三次频谱特征。For environmental clutter signals, there is no specific rule for their cyclic cross-correlation spectra. Considering that for signals with micro-Doppler characteristics, the peak position of the cyclic cross-correlation spectrum remains relatively unchanged at any carrier frequency; for Doppler signals, the cross-correlation of different carrier frequencies, or the autocorrelation of the same carrier frequency, will change the cyclic cross-correlation spectrum. The slice spectrum with the largest energy is selected as the target slice spectrum from multiple slice spectra in the cyclic cross-correlation spectrum, and then the target slice spectrum is subjected to the third FFT spectrum feature analysis to obtain the third spectrum features under different carrier frequencies.
第一FFT频谱特征分析、第二FFT频谱特征分析、第三FFT频谱特征分析可以为相同的FFT频谱特征分析,也可以为不同的FFT频谱特征分析,“第一”、“第二”和“第三”在此处仅作区分作用,不表示其他任何含义。同理,第一频谱特征、第二频谱特征和第三频谱特征可以为相同的频谱特征,也可以为不同的频谱特征,“第一”、“第二”和“第三”在此处仅作区分作用,不表示其他任何含义。The first FFT spectrum feature analysis, the second FFT spectrum feature analysis, and the third FFT spectrum feature analysis can be the same FFT spectrum feature analysis or different FFT spectrum feature analyses, and "first", "second", and "third" are used here only for distinction and do not represent any other meanings. Similarly, the first spectrum feature, the second spectrum feature, and the third spectrum feature can be the same spectrum feature or different spectrum features, and "first", "second", and "third" are used here only for distinction and do not represent any other meanings.
基于本实施方式进行测试,假设目标雷达所设置的两个载频分别为载频


探测结果如下:The detection results are as follows:
110m模拟器密遮挡状态下10G频率探测波探测结果参照图2至图6。其中,图2为110m模拟器密遮挡状态下10G频率探测波探测过程的一维距离像,图3为110m模拟器密遮挡状态下10G频率探测波探测过程的时域回波,图4为110m模拟器密遮挡状态下10G频率探测波探测过程的时域回波FFT,图5为110m模拟器密遮挡状态下10G频率探测波探测过程的IMF信号FFT,图6为110m模拟器密遮挡状态下10G频率探测波探测过程的目标切片频谱FFT。The detection results of the 10G frequency detection wave under the dense occlusion state of the 110m simulator are shown in Figures 2 to 6. Among them, Figure 2 is a one-dimensional distance image of the 10G frequency detection wave detection process under the dense occlusion state of the 110m simulator, Figure 3 is the time domain echo of the 10G frequency detection wave detection process under the dense occlusion state of the 110m simulator, Figure 4 is the time domain echo FFT of the 10G frequency detection wave detection process under the dense occlusion state of the 110m simulator, Figure 5 is the IMF signal FFT of the 10G frequency detection wave detection process under the dense occlusion state of the 110m simulator, and Figure 6 is the target slice spectrum FFT of the 10G frequency detection wave detection process under the dense occlusion state of the 110m simulator.
110m模拟器密遮挡状态下8.5G频率探测波探测结果参照图7至图11。其中,图7为110m模拟器密遮挡状态下8.5G频率探测波探测过程的一维距离像,图8为110m模拟器密遮挡状态下8.5G频率探测波探测过程的时域回波,图9为110m模拟器密遮挡状态下8.5G频率探测波探测过程的时域回波FFT,图10为110m模拟器密遮挡状态下8.5G频率探测波探测过程的IMF信号FFT,图11为110m模拟器密遮挡状态下8.5G频率探测波探测过程的目标切片频谱FFT。The detection results of the 8.5G frequency detection wave under the dense occlusion state of the 110m simulator are shown in Figures 7 to 11. Among them, Figure 7 is a one-dimensional distance image of the 8.5G frequency detection wave detection process under the dense occlusion state of the 110m simulator, Figure 8 is the time domain echo of the 8.5G frequency detection wave detection process under the dense occlusion state of the 110m simulator, Figure 9 is the time domain echo FFT of the 8.5G frequency detection wave detection process under the dense occlusion state of the 110m simulator, Figure 10 is the IMF signal FFT of the 8.5G frequency detection wave detection process under the dense occlusion state of the 110m simulator, and Figure 11 is the target slice spectrum FFT of the 8.5G frequency detection wave detection process under the dense occlusion state of the 110m simulator.
110m目标人员密遮挡状态下10G频率探测波探测结果参照图12至图16。其中,图12为110m目标人员密遮挡状态下10G频率探测波探测过程的一维距离像,图13为110m目标人员密遮挡状态下10G频率探测波探测过程的时域回波,图14为110m目标人员密遮挡状态下10G频率探测波探测过程的时域回波FFT,图15为110m目标人员密遮挡状态下10G频率探测波探测过程的IMF信号FFT,图16为110m目标人员密遮挡状态下10G频率探测波探测过程的目标切片频谱FFT。The detection results of the 10G frequency detection wave under the dense obstruction of the target personnel at 110m refer to Figures 12 to 16. Among them, Figure 12 is a one-dimensional distance image of the 10G frequency detection wave detection process under the dense obstruction of the target personnel at 110m, Figure 13 is a time domain echo of the 10G frequency detection wave detection process under the dense obstruction of the target personnel at 110m, Figure 14 is a time domain echo FFT of the 10G frequency detection wave detection process under the dense obstruction of the target personnel at 110m, Figure 15 is an IMF signal FFT of the 10G frequency detection wave detection process under the dense obstruction of the target personnel at 110m, and Figure 16 is a target slice spectrum FFT of the 10G frequency detection wave detection process under the dense obstruction of the target personnel at 110m.
110m目标人员密遮挡状态下8.5G频率探测波探测结果参照图17至图21。其中,图17为110m目标人员密遮挡状态下8.5G频率探测波探测过程的一维距离像,图18为110m目标人员密遮挡状态下8.5G频率探测波探测过程的时域回波,图19为110m目标人员密遮挡状态下8.5G频率探测波探测过程的时域回波FFT,图20为110m目标人员密遮挡状态下8.5G频率探测波探测过程的IMF信号FFT,图21为110m目标人员密遮挡状态下8.5G频率探测波探测过程的目标切片频谱FFT。The detection results of the 8.5G frequency detection wave under the dense occlusion of the target personnel at 110m refer to Figures 17 to 21. Among them, Figure 17 is a one-dimensional distance image of the 8.5G frequency detection wave detection process under the dense occlusion of the target personnel at 110m, Figure 18 is the time domain echo of the 8.5G frequency detection wave detection process under the dense occlusion of the target personnel at 110m, Figure 19 is the time domain echo FFT of the 8.5G frequency detection wave detection process under the dense occlusion of the target personnel at 110m, Figure 20 is the IMF signal FFT of the 8.5G frequency detection wave detection process under the dense occlusion of the target personnel at 110m, and Figure 21 is the target slice spectrum FFT of the 8.5G frequency detection wave detection process under the dense occlusion of the target personnel at 110m.
在其中一种实施方式中,通过经验模态分解方法分别对不同载频下处于距离区间内的每个时域回波进行分解,得到不同载频下的多个本征模态函数具体包括如下步骤:In one embodiment, decomposing each time domain echo in a distance interval at different carrier frequencies by an empirical mode decomposition method to obtain multiple intrinsic mode functions at different carrier frequencies specifically includes the following steps:
将时域回波作为目标信号,并获取目标信号的极大值点和极小值点;The time domain echo is used as the target signal, and the maximum and minimum points of the target signal are obtained;
基于极大值点拟合出极大值包络线,并基于极小值点拟合出极小值包络线;A maximum envelope is fitted based on the maximum value point, and a minimum envelope is fitted based on the minimum value point;
根据极大值包络线和极小值包络线计算得到时域回波的均值包络;The mean envelope of the time domain echo is calculated based on the maximum envelope and the minimum envelope;
将目标信号减去均值包络,得到备选信号;Subtract the mean envelope from the target signal to obtain the candidate signal;
判断备选信号是否为时域回波的本征模态函数分量;Determine whether the candidate signal is an intrinsic mode function component of the time domain echo;
若备选信号不为时域回波的本征模态函数分量,则将备选信号作为目标信号,并重复获取目标信号的极值点以获取新备选信号,直至新备选信号为时域回波的本征模态函数分量;If the candidate signal is not an intrinsic mode function component of the time domain echo, the candidate signal is used as the target signal, and the extreme value points of the target signal are repeatedly obtained to obtain a new candidate signal until the new candidate signal is an intrinsic mode function component of the time domain echo;
将本征模态函数分量作为目标信号,重复获取目标信号的极值点以获取时域回波多阶的本征模态函数分量,直至任意一阶的本征模态函数余量或本征模态函数分量小于预设的分解阈值;Taking the intrinsic mode function component as the target signal, repeatedly obtaining the extreme value points of the target signal to obtain the intrinsic mode function components of multiple orders of the time domain echo, until the intrinsic mode function residual or the intrinsic mode function component of any order is less than a preset decomposition threshold;
或,or,
直至任意一阶的本征模态函数余量为单调函数或常量。The residual of the eigenmode function up to any order is a monotonic function or a constant.
其中,本征模态函数IMF的定义如下:Among them, the definition of the intrinsic mode function IMF is as follows:
(1)函数在整个时间范围内,局部极值点和过零点的数目必须相等或最多相差一个;(1) The number of local extreme points and zero crossing points of the function must be equal or differ by at most one over the entire time range;
(2)在任意时刻点,局部极大值点的极大值包络线和局部极小值点的极小值包络线的均值包络必须为零。(2) At any time point, the mean envelope of the maximum envelope of the local maximum point and the mean envelope of the minimum envelope of the local minimum point must be zero.
假设某个作为目标信号的时域回波为






将目标信号序列减去


一般来说备选信号



在本实施方式中,若判断备选信号是否为时域回波的本征模态函数分量的判断结果为备选信号为时域回波的本征模态函数分量,则具体执行如下步骤:In this implementation, if the result of determining whether the candidate signal is an intrinsic mode function component of a time domain echo is that the candidate signal is an intrinsic mode function component of a time domain echo, the following steps are specifically performed:
若备选信号为时域回波的本征模态函数分量,则将本征模态函数分量作为目标信号,重复获取目标信号的极值点以获取时域回波多阶的本征模态函数分量,直至任意一阶的本征模态函数余量或本征模态函数分量小于分解阈值;If the candidate signal is an intrinsic mode function component of the time domain echo, the intrinsic mode function component is used as the target signal, and the extreme value points of the target signal are repeatedly obtained to obtain the intrinsic mode function components of multiple orders of the time domain echo, until the intrinsic mode function residual or the intrinsic mode function component of any order is less than the decomposition threshold;
或,or,
直至任意一阶的本征模态函数余量为单调函数或常量。The residual of the eigenmode function up to any order is a monotonic function or a constant.
其中,对





最后,目标信号

式中,


本发明还公开一种远距离人体呼吸信号检测的系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如上述中的远距离人体呼吸信号检测的方法。The present invention also discloses a system for long-distance human breathing signal detection, including a memory, a processor, and a computer program stored in the memory and executable on the processor. When the processor executes the computer program, the method for long-distance human breathing signal detection as described above is implemented.
本实施方式的实施原理为:The implementation principle of this embodiment is:
通过程序的调取,执行如下步骤:基于多个不同的载频并通过目标雷达向目标物体发射多次探测波;分别接收不同载频下多次探测波经目标物体反射的散射回波;基于多个散射回波获取对应载频下的多个时域回波,并将多个时域回波组成为对应载频下的时域回波记录剖面;分别对不同载频下时域回波记录剖面中的时域回波进行预处理,并根据时域回波记录剖面计算生成时域回波的一维距离像;由于人体呼吸属于一种周期性变化,因此选取一维距离像中具有周期性变化的距离区间;对不同载频下处于距离区间内的每个时域回波进行第一FFT频谱特征分析,得到不同载频下的第一频谱特征;判断不同载频下的第一频谱特征是否相同;若不同载频下的第一频谱特征相同,则判定散射回波中存在呼吸信号。通过上述方法步骤可以在远距离且具有干扰的情况下探测到人体呼吸信号。By calling the program, the following steps are performed: based on multiple different carrier frequencies, multiple detection waves are transmitted to the target object through the target radar; scattered echoes reflected by the target object from multiple detection waves at different carrier frequencies are received respectively; multiple time domain echoes at the corresponding carrier frequency are obtained based on multiple scattered echoes, and multiple time domain echoes are composed into a time domain echo recording profile at the corresponding carrier frequency; the time domain echoes in the time domain echo recording profile at different carrier frequencies are preprocessed respectively, and a one-dimensional distance image of the time domain echo is calculated and generated according to the time domain echo recording profile; since human breathing is a periodic change, a distance interval with periodic changes in the one-dimensional distance image is selected; the first FFT spectrum feature analysis is performed on each time domain echo in the distance interval at different carrier frequencies to obtain the first spectrum feature at different carrier frequencies; it is determined whether the first spectrum features at different carrier frequencies are the same; if the first spectrum features at different carrier frequencies are the same, it is determined that there is a breathing signal in the scattered echo. The above method steps can detect human breathing signals at a long distance and under interference.
本发明还公开一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现如上述中的远距离人体呼吸信号检测的方法的步骤。The present invention also discloses a computer-readable storage medium on which a computer program is stored. When the computer program is executed by a processor, the steps of the method for long-distance human breathing signal detection as described above are implemented.
本实施方式的实施原理为:The implementation principle of this embodiment is:
通过程序的调取,执行如下步骤:基于多个不同的载频并通过目标雷达向目标物体发射多次探测波;分别接收不同载频下多次探测波经目标物体反射的散射回波;基于多个散射回波获取对应载频下的多个时域回波,并将多个时域回波组成为对应载频下的时域回波记录剖面;分别对不同载频下时域回波记录剖面中的时域回波进行预处理,并根据时域回波记录剖面计算生成时域回波的一维距离像;由于人体呼吸属于一种周期性变化,因此选取一维距离像中具有周期性变化的距离区间;对不同载频下处于距离区间内的每个时域回波进行第一FFT频谱特征分析,得到不同载频下的第一频谱特征;判断不同载频下的第一频谱特征是否相同;若不同载频下的第一频谱特征相同,则判定散射回波中存在呼吸信号。通过上述方法步骤可以在远距离且具有干扰的情况下探测到人体呼吸信号。By calling the program, the following steps are performed: based on multiple different carrier frequencies, multiple detection waves are transmitted to the target object through the target radar; scattered echoes reflected by the target object from multiple detection waves at different carrier frequencies are received respectively; multiple time domain echoes at the corresponding carrier frequency are obtained based on multiple scattered echoes, and multiple time domain echoes are composed into a time domain echo recording profile at the corresponding carrier frequency; the time domain echoes in the time domain echo recording profile at different carrier frequencies are preprocessed respectively, and a one-dimensional distance image of the time domain echo is calculated and generated according to the time domain echo recording profile; since human breathing is a periodic change, a distance interval with periodic changes in the one-dimensional distance image is selected; the first FFT spectrum feature analysis is performed on each time domain echo in the distance interval at different carrier frequencies to obtain the first spectrum feature at different carrier frequencies; it is determined whether the first spectrum features at different carrier frequencies are the same; if the first spectrum features at different carrier frequencies are the same, it is determined that there is a breathing signal in the scattered echo. The above method steps can detect human breathing signals at a long distance and under interference.
所属领域的普通技术人员应当理解:以上任何实施例的讨论仅为示例性的,并非旨在暗示本申请的保护范围限于这些例子;在本申请的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上的本申请中一个或多个实施例的不同方面的许多其它变化,为了简明它们没有在细节中提供。A person skilled in the art should understand that the discussion of any of the above embodiments is merely illustrative and is not intended to imply that the scope of protection of the present application is limited to these examples. In line with the concept of the present application, the technical features in the above embodiments or different embodiments may be combined, the steps may be implemented in any order, and there are many other variations of different aspects of one or more embodiments of the present application as above, which are not provided in detail for the sake of simplicity.
本申请中一个或多个实施例旨在涵盖落入本申请的宽泛范围之内的所有这样的替换、修改和变型。因此,凡在本申请中一个或多个实施例的精神和原则之内,所做的任何省略、修改、等同替换、改进等,均应包含在本申请的保护范围之内。One or more embodiments of the present application are intended to cover all such substitutions, modifications and variations that fall within the broad scope of the present application. Therefore, any omissions, modifications, equivalent substitutions, improvements, etc. made within the spirit and principles of one or more embodiments of the present application should be included in the protection scope of the present application.
Claims (9)
Translated fromChinese










Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310438788.3ACN116148850B (en) | 2023-04-23 | 2023-04-23 | A method, system and storage medium for long-distance human respiratory signal detection |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310438788.3ACN116148850B (en) | 2023-04-23 | 2023-04-23 | A method, system and storage medium for long-distance human respiratory signal detection |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN116148850A CN116148850A (en) | 2023-05-23 |
| CN116148850Btrue CN116148850B (en) | 2023-07-14 |
Family
ID=86354773
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310438788.3AActiveCN116148850B (en) | 2023-04-23 | 2023-04-23 | A method, system and storage medium for long-distance human respiratory signal detection |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116148850B (en) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113440120A (en)* | 2021-06-17 | 2021-09-28 | 北京航空航天大学 | Millimeter wave radar-based method for detecting respiration and heartbeat of person |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2464029A1 (en)* | 2004-04-08 | 2005-10-08 | Valery Telfort | Non-invasive ventilation monitor |
| EP2343571A1 (en)* | 2010-01-11 | 2011-07-13 | BAE Systems PLC | Method of providing a radar high range resolution profile |
| CN104391282A (en)* | 2014-11-24 | 2015-03-04 | 天津大学 | Method for improving imaging quality by spectrum correction |
| CN109507653A (en)* | 2018-10-22 | 2019-03-22 | 中国人民解放军第四军医大学 | A method of multi-information perception bioradar system and its acquisition target information based on UWB |
| US11796631B2 (en)* | 2019-08-05 | 2023-10-24 | Electronics And Telecommunications Research Institute | Method of transmitting and receiving OFDM signal for radar applications and apparatuses performing the method |
| CN111273250B (en)* | 2020-03-04 | 2023-08-25 | 中南大学 | A nonlinear frequency stepping method and system for stepping frequency radar |
| CN112137620B (en)* | 2020-08-27 | 2021-06-11 | 广东省地震局 | Ultra-wideband radar-based human body weak respiration signal detection method |
| CN112998668B (en)* | 2021-02-06 | 2022-08-23 | 路晟悠拜(重庆)科技有限公司 | Millimeter wave-based non-contact far-field multi-human-body respiration heart rate monitoring method |
| CN112986946B (en)* | 2021-04-01 | 2022-06-14 | 武汉大学 | Method for inverting undirected sea wave spectrum by using multi-frequency high-frequency radar sea echo |
| CN115460980A (en)* | 2021-07-29 | 2022-12-09 | 南京浙溧智能制造研究院有限公司 | A Non-contact Respiratory Monitoring Method Based on Doppler Radar |
| CN114983354B (en)* | 2022-05-06 | 2025-08-29 | 北京邮电大学 | A method and device for detecting respiratory rate and heart rate |
- 2023
- 2023-04-23CNCN202310438788.3Apatent/CN116148850B/enactiveActive
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113440120A (en)* | 2021-06-17 | 2021-09-28 | 北京航空航天大学 | Millimeter wave radar-based method for detecting respiration and heartbeat of person |
Non-Patent Citations (1)
| Title |
|---|
| 太赫兹频段下基于EMD的人体生命特征检测;刘通;徐政五;吴元杰;皮亦鸣;;信号处理(12);1650-1659* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116148850A (en) | 2023-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Wang | CFAR-based interference mitigation for FMCW automotive radar systems | |
| US10746852B2 (en) | Vital signs monitoring via radio reflections | |
| CN110068815A (en) | System and method and storage medium for human behavioral modeling and power control | |
| EP3879302A1 (en) | Method, system, and computer program product for automatic multi object localization and/or vital sign monitoring | |
| Lazaro et al. | Vital signs monitoring using impulse based UWB signal | |
| Jokanovic et al. | Multi‐window time–frequency signature reconstruction from undersampled continuous‐wave radar measurements for fall detection | |
| CN116058818B (en) | Ultra-wideband radar heart rate detection method based on multi-sequence WOA-VMD algorithm | |
| CN106291524A (en) | LFMCW radar detection movement human mesh calibration method based on anthropometric dummy | |
| CN104783799B (en) | A kind of contactless single goal respiratory rate of short distance and amplitude of respiration detection method | |
| JP6179940B2 (en) | Doppler imaging signal transmitter, Doppler imaging signal receiver, Doppler imaging system and method | |
| CN106199549B (en) | A method for improving the signal-to-noise ratio of LFMCW radar by spectral subtraction | |
| KR101777000B1 (en) | Method and Device for Measuring Biometric Data using UWB Radar | |
| Jokanović et al. | Instantaneous frequency and time-frequency signature estimation using compressive sensing | |
| CN110488227A (en) | Sourceless seism suppressing method under complex environment based on cognition radar waveform design | |
| Mostafa et al. | Singular spectrum analysis-based algorithm for vitality monitoring using M-sequence UWB sensor | |
| CN116338682A (en) | A Life Detection Algorithm Based on SE and SSD for UWB Radar | |
| CN114667094B (en) | Method and device for eliminating random noise of radar acquisition signal in biological signal measurement radar | |
| CN116148850B (en) | A method, system and storage medium for long-distance human respiratory signal detection | |
| CN105919624B (en) | A kind of high impulse repeats the coding and device of scanning frequency signal | |
| KR20160036967A (en) | Method and Device for Measuring Biometric Data using UWB Radar | |
| JP2008216005A (en) | Active sonar device | |
| CN119024320A (en) | A method and system for detecting stationary human targets based on FMCW through-wall radar | |
| Fu et al. | EEMD-MICA based heart rate extraction algorithm for radar signals | |
| Chunming et al. | The study of UWB radar life-detection for searching human subjects | |
| CN115201760A (en) | Strong sea clutter suppression method based on multi-domain combination |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |