CN116071714A - Lane departure detection method, system, electronic device and readable storage medium - Google Patents
Lane departure detection method, system, electronic device and readable storage mediumDownload PDFInfo
- Publication number
- CN116071714A CN116071714ACN202211684851.3ACN202211684851ACN116071714ACN 116071714 ACN116071714 ACN 116071714ACN 202211684851 ACN202211684851 ACN 202211684851ACN 116071714 ACN116071714 ACN 116071714A
- Authority
- CN
- China
- Prior art keywords
- lane
- coordinate system
- image
- deviation
- vanishing point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/54—Extraction of image or video features relating to texture
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/762—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using clustering, e.g. of similar faces in social networks
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computing Systems (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及智能车辆技术领域,尤其涉及一种车道偏离检测方法、系统、电子设备及可读存储介质。The invention relates to the technical field of intelligent vehicles, in particular to a lane departure detection method, system, electronic equipment and a readable storage medium.
背景技术Background technique
车道偏离预警系统(LDW,LaneDepartureWarningSystem)作为主动驾驶安全的必要补充和辅助措施,是一种通过报警的方式辅助驾驶员减少汽车因车道偏离而发生交通事故的手段,提高了驾驶员的驾驶安全。目前,车道偏离预警系统中对车道偏离进行检测通常是根据图像处理、机器学习、深度学习等方法识别车辆所在车道的车道线或者车辆周围的风险对象,再根据车道线或风险对象的位置信息确定与车辆之间的距离。Lane Departure Warning System (LDW, Lane Departure Warning System) is a necessary supplement and auxiliary measure for active driving safety. It is a means of assisting the driver to reduce traffic accidents caused by lane departure by means of an alarm, and improves the driving safety of the driver. At present, the detection of lane departure in the lane departure warning system is usually based on image processing, machine learning, deep learning and other methods to identify the lane line of the vehicle's lane or the risky objects around the vehicle, and then determine the location information of the lane line or risky object distance from the vehicle.
但是,基于车道线或风险对象的车道偏离检测算法需要双目摄像头、车载雷达等进行实时数据采集,同时依赖于清晰的车道线或风险对象计算偏离距离,使得现有的车道偏离检测算法检测难度过大,车道偏离检测结果的准确性较低。However, the lane departure detection algorithm based on lane lines or risk objects requires binocular cameras, vehicle radar, etc. for real-time data collection, and at the same time relies on clear lane lines or risk objects to calculate the departure distance, making the existing lane departure detection algorithms difficult to detect If the value is too large, the accuracy of lane departure detection results will be low.
发明内容Contents of the invention
为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。In order to provide a basic understanding of some aspects of the disclosed embodiments, a brief summary is presented below. The summary is not intended to be an extensive overview nor to identify key/important elements or to delineate the scope of these embodiments, but rather serves as a prelude to the detailed description that follows.
鉴于以上所述现有技术的缺点,本发明公开了一种车道偏离检测方法、系统、电子设备及可读存储介质,以提高车道偏离检测结果的准确性。In view of the above-mentioned shortcomings of the prior art, the present invention discloses a lane departure detection method, system, electronic equipment and readable storage medium to improve the accuracy of lane departure detection results.
本发明公开了一种车道偏离检测方法,包括:获取车辆终端在行驶方向上的车道采集图像;建立所述行驶方向映射在所述车道采集图像的基准坐标系;识别所述车道采集图像中车道的车道消失点,得到所述车道消失点映射在所述基准坐标系的消失点坐标;确定所述消失点坐标与所述行驶方向之间的车道偏移参数,并根据所述车道偏移参数确定所述车道偏移检测结果。The invention discloses a lane departure detection method, comprising: acquiring a lane acquisition image of a vehicle terminal in a driving direction; establishing a reference coordinate system in which the driving direction is mapped to the lane acquisition image; identifying the lane in the lane acquisition image The vanishing point of the lane, obtain the vanishing point coordinates of the lane vanishing point mapped in the reference coordinate system; determine the lane offset parameter between the vanishing point coordinate and the driving direction, and according to the lane offset parameter The lane departure detection result is determined.
可选地,建立所述行驶方向映射在所述车道采集图像的基准坐标系,包括:获取所述车道采集图像的图像尺寸,并根据所述图像尺寸确定所述车道采集图像的图像中心点;将所述图像中心点作为坐标系原点建立笛卡尔坐标系,得到基准坐标系,其中,将所述基准坐标系的纵轴方向作为所述车辆终端的行驶方向。Optionally, establishing the reference coordinate system of the driving direction mapping on the captured image of the lane includes: acquiring the image size of the captured image of the lane, and determining the image center point of the captured image of the lane according to the image size; A Cartesian coordinate system is established by using the center point of the image as the origin of the coordinate system to obtain a reference coordinate system, wherein the direction of the vertical axis of the reference coordinate system is used as the driving direction of the vehicle terminal.
可选地,建立所述行驶方向映射在所述车道采集图像的基准坐标系,包括:将所述车辆终端映射在所述车道采集图像中;将所述车辆终端作为坐标系原点建立笛卡尔坐标系,得到基准坐标系,其中,将所述基准坐标系的纵轴方向作为所述车辆终端的行驶方向。Optionally, establishing a reference coordinate system in which the driving direction is mapped to the acquired image of the lane includes: mapping the vehicle terminal in the acquired image of the lane; establishing Cartesian coordinates with the vehicle terminal as the origin of the coordinate system system to obtain a reference coordinate system, wherein the direction of the vertical axis of the reference coordinate system is taken as the driving direction of the vehicle terminal.
可选地,建立所述行驶方向映射在所述车道采集图像的基准坐标系,包括:根据所述车道采集图像中车道的两条车道边线确定车道中轴线,并根据所述车道中轴线的轴线长度确定所述车道中轴线的轴线中心点;若所述车道采集图像中车道的车道类型为直线道路,则将所述轴线中心点作为坐标系原点,并将所述中轴线确定为笛卡尔坐标系的纵轴,建立所述笛卡尔坐标系,得到所述行驶方向映射在所述车道采集图像的基准坐标系,其中,将所述基准坐标系的纵轴方向作为所述车辆终端的行驶方向;若所述车道采集图像中车道的车道类型为弯曲道路,则将所述轴线中心点作为坐标系原点,并将与所述中轴线相切的轴线切线作为笛卡尔坐标系的纵轴,建立所述笛卡尔坐标系,得到所述行驶方向映射在所述车道采集图像的基准坐标系,其中,将所述基准坐标系的纵轴方向作为所述车辆终端的行驶方向。Optionally, establishing the reference coordinate system of the driving direction mapping in the lane acquisition image includes: determining the lane central axis according to the two lane sidelines of the lane in the lane acquisition image, and determining the lane central axis according to the axis of the lane central axis The length determines the axis center point of the central axis of the lane; if the lane type of the lane in the lane acquisition image is a straight road, the axis center point is used as the origin of the coordinate system, and the central axis is determined as Cartesian coordinates The vertical axis of the reference coordinate system is used to establish the Cartesian coordinate system to obtain the reference coordinate system in which the driving direction is mapped to the image collected in the lane, wherein the direction of the vertical axis of the reference coordinate system is used as the driving direction of the vehicle terminal ; If the lane type of the lane in the lane collection image is a curved road, the center point of the axis is used as the origin of the coordinate system, and the axis tangent line tangent to the central axis is used as the longitudinal axis of the Cartesian coordinate system to establish The Cartesian coordinate system obtains a reference coordinate system in which the driving direction is mapped on the lane to collect images, wherein the direction of the vertical axis of the reference coordinate system is used as the driving direction of the vehicle terminal.
可选地,获取车辆终端在行驶方向上的车道采集图像之后,识别所述车道采集图像中车道的车道消失点之前,所述方法还包括:对所述车道采集图像进行图像预处理,其中,所述图像预处理包括图像去噪、提高图像清晰度、图像尺寸归一化中的至少一种。Optionally, after acquiring the lane acquisition image of the vehicle terminal in the driving direction and before identifying the lane vanishing point of the lane in the lane acquisition image, the method further includes: performing image preprocessing on the lane acquisition image, wherein, The image preprocessing includes at least one of image denoising, image definition improvement, and image size normalization.
可选地,识别所述车道采集图像中车道的车道消失点,包括:从所述车道采集图像中提取局部纹理特征;根据所述局部纹理特征中的差分激励分量从所述车道采集图像中确定道路显著区域;基于线性投票模式,通过所述局部纹理特征中的方向分量和所述道路显著区域确定所述车道采集图像中的车道消失点。Optionally, identifying the lane vanishing point of the lane in the lane acquisition image includes: extracting a local texture feature from the lane acquisition image; determining from the lane acquisition image according to a differential excitation component in the local texture feature Road salient area: Based on a linear voting mode, the lane vanishing point in the lane acquisition image is determined through the directional component in the local texture feature and the road salient area.
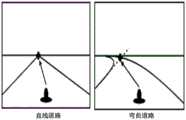
可选地,识别所述车道采集图像中车道的车道消失点,还包括:若所述车道采集图像中车道的车道类型为直线道路,则将所述车道采集图像中车道的两条车道边线的交汇点作为所述车道采集图像中的车道消失点;若所述车道采集图像中车道的车道类型为弯曲道路,则将所述车道采集图像中车道的两条车道边线划分为内侧边线和外侧边线,确定与所述内侧边线相切的内侧切线,并将所述内侧切线与所述外侧边线的交汇点作为所述车道采集图像中的车道消失点。Optionally, identifying the lane vanishing points of the lanes in the lane collection image further includes: if the lane type of the lane in the lane collection image is a straight road, the two lane sidelines of the lane in the lane collection image The intersection point is used as the lane vanishing point in the lane collection image; if the lane type of the lane in the lane collection image is a curved road, then the two lane sidelines of the lane in the lane collection image are divided into an inner sideline and an outer sideline , determine an inner tangent line tangent to the inner sideline, and use the intersection point of the inner tangent line and the outer sideline as the lane vanishing point in the lane acquisition image.
可选地,所述基准坐标系的纵轴用于表征所述车辆终端的行驶方向,确定所述消失点坐标与所述行驶方向之间的车道偏移参数,包括以下至少一种:建立所述消失点坐标与所述基准坐标系的原点之间的参考线,将所述参考线与所述基准坐标系的纵轴之间的内角角度作为所述消失点坐标与所述行驶方向之间的车道偏移参数;确定所述消失点坐标与所述基准坐标系的纵轴之间的最短距离,将所述最短距离作为所述消失点坐标与所述行驶方向之间的车道偏移参数。Optionally, the vertical axis of the reference coordinate system is used to characterize the driving direction of the vehicle terminal, and determining the lane offset parameter between the coordinates of the vanishing point and the driving direction includes at least one of the following: establishing the The reference line between the coordinates of the vanishing point and the origin of the reference coordinate system, and the interior angle between the reference line and the longitudinal axis of the reference coordinate system is used as the distance between the coordinates of the vanishing point and the direction of travel. The lane offset parameter; determine the shortest distance between the coordinates of the vanishing point and the longitudinal axis of the reference coordinate system, and use the shortest distance as the lane offset parameter between the coordinates of the vanishing point and the direction of travel .
可选地,根据所述车道偏移参数确定所述车道偏移检测结果,包括:若所述车道偏移参数大于或等于预设的偏移参数阈值,则将车道偏移检测结果确定为发生车道偏移,并确定所述车道消失点位于所述基准坐标系的象限区域,根据所述象限区域确定车道偏移方向;若所述车道偏移参数小于预设的偏移参数阈值,则将车道偏移检测结果确定为车道未偏移。Optionally, determining the lane deviation detection result according to the lane deviation parameter includes: if the lane deviation parameter is greater than or equal to a preset deviation parameter threshold, determining the lane deviation detection result as occurrence Lane offset, and determine that the lane vanishing point is located in the quadrant area of the reference coordinate system, determine the lane offset direction according to the quadrant area; if the lane offset parameter is less than the preset offset parameter threshold, the The lane deviation detection result determines that the lane is not deviated.
可选地,若所述车道偏移检测结果包括发生车道偏移,所述方法还包括以下至少一种:采集所述车辆终端的实际校正角度,直到所述车道偏移检测结果包括车道未偏移,并根据采集到的实际校正角度与预设的期望预警角度之间的比较结果对所述偏移参数阈值进行调整;采集所述车辆终端的实际校正角度,直到所述车道偏移检测结果包括车道未偏移,并将采集到的实际校正角度与预设的期望预警角度进行比较,得到期望比较结果,若获取到的比较结果的数量大于预设数量阈值,则根据各所述期望比较结果确定所述偏移参数阈值的置信度,根据置信度与预设的初始置信度阈值之间的比较结果对所述偏移参数阈值进行调整;向用户展示所述车道偏移检测结果,并采集所述车道偏移检测结果对应的用户反馈信息,若所述用户反馈信息包括结果不正确,则根据预设调整比例对所述偏移参数阈值进行调整。Optionally, if the lane deviation detection result includes occurrence of lane deviation, the method further includes at least one of the following: collecting the actual correction angle of the vehicle terminal until the lane deviation detection result includes lane undeviation and adjust the offset parameter threshold according to the comparison result between the collected actual correction angle and the preset expected warning angle; collect the actual correction angle of the vehicle terminal until the lane deviation detection result Including that the lane is not offset, and comparing the actual correction angle collected with the preset expected warning angle to obtain the expected comparison result, if the number of obtained comparison results is greater than the preset number threshold, then according to each of the expected comparisons As a result, the confidence degree of the deviation parameter threshold is determined, and the deviation parameter threshold is adjusted according to the comparison result between the confidence degree and the preset initial confidence degree threshold; the lane deviation detection result is displayed to the user, and Collect user feedback information corresponding to the lane deviation detection result, and adjust the deviation parameter threshold according to a preset adjustment ratio if the user feedback information includes an incorrect result.
可选地,若所述车道偏移检测结果包括发生车道偏移,所述方法还包括:获取所述车辆终端的方向盘角度,根据所述方向盘角度的方向与所述车道偏移方向之间的对比文件确定预警抑制状态;若所述预警抑制状态为预警抑制开启,则在预设时间段之后重新确定车道偏移检测结果;若所述预警抑制状态为预警抑制关闭,则通过预设预警方式进行车道偏移提示,和/或,根据所述车道偏移方向控制所述车辆终端的纵向行驶方向,直到所述车道偏移检测结果包括车道未偏移。Optionally, if the lane deviation detection result includes occurrence of lane deviation, the method further includes: acquiring the steering wheel angle of the vehicle terminal, and according to the distance between the direction of the steering wheel angle and the direction of the lane deviation Compare the file to determine the early warning suppression state; if the early warning suppression state is that the early warning suppression is on, then re-determine the lane deviation detection result after a preset time period; if the early warning suppression state is that the early warning suppression is off, then use the preset early warning method Give a lane departure prompt, and/or control the longitudinal driving direction of the vehicle terminal according to the lane departure direction until the lane departure detection result includes no lane departure.
可选地,获取车辆终端在行驶方向上的车道采集图像,包括:通过设置在车辆终端的单目摄像头采集所述车辆终端在行驶方向上的车道采集图像。Optionally, acquiring the lane acquisition image of the vehicle terminal in the direction of travel includes: acquiring the lane acquisition image of the vehicle terminal in the direction of travel by using a monocular camera arranged on the vehicle terminal.
本发明公开了一种车道偏离检测系统,包括:获取模块,用于获取车辆终端在行驶方向上的车道采集图像;建立模块,用于建立所述行驶方向映射在所述车道采集图像的基准坐标系;识别模块,用于识别所述车道采集图像中车道的车道消失点,得到所述车道消失点映射在所述基准坐标系的消失点坐标;确定模块,用于确定所述消失点坐标与所述行驶方向之间的车道偏移参数,并根据所述车道偏移参数确定所述车道偏移检测结果。The invention discloses a lane departure detection system, comprising: an acquisition module, used to acquire a lane acquisition image of a vehicle terminal in a driving direction; an establishment module, used to establish a reference coordinate of the driving direction mapped on the lane acquisition image system; an identification module, used to identify the lane vanishing point of the lane in the lane collection image, and obtain the vanishing point coordinates of the lane vanishing point mapped in the reference coordinate system; a determining module, used to determine the vanishing point coordinates and Lane deviation parameters between the driving directions, and determine the lane deviation detection result according to the lane deviation parameters.
本发明公开了一种计算机可读存储介质,其上存储有计算机程序:所述计算机程序被处理器执行时实现上述的方法。The invention discloses a computer-readable storage medium, on which a computer program is stored: when the computer program is executed by a processor, the above-mentioned method is realized.
本发明的有益效果:Beneficial effects of the present invention:
通过获取车辆终端在行驶方向上的车道采集图像,并从车道采集图像上识别车道消失点,从而根据消失点坐标与行驶方向之间的车道偏移参数确定车道偏移检测结果,完成车道偏移检测。这样,相较于通过车道线或风险对象检测车道偏离,将消失点作为车辆行驶目标的收敛点,不需要双目摄像头、车载雷达辅助采集数据,同时,即使在车道线不清楚或者无法识别风险对象的情况下依然能够实现车道偏移检测,从而减少了车道偏移检测的识别难度。By acquiring the lane acquisition image of the vehicle terminal in the driving direction, and identifying the lane vanishing point from the lane acquisition image, the lane deviation detection result is determined according to the lane deviation parameters between the vanishing point coordinates and the driving direction, and the lane deviation is completed detection. In this way, compared to detecting lane departure through lane lines or risk objects, using the vanishing point as the convergence point of the vehicle’s driving target does not require binocular cameras and vehicle radar to assist in data collection. At the same time, even when the lane line is unclear or the risk cannot be identified The lane departure detection can still be realized in the case of an object, thereby reducing the identification difficulty of the lane departure detection.
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。It is to be understood that both the foregoing general description and the following detailed description are exemplary and explanatory only and are not restrictive of the application.
附图说明Description of drawings
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施例,并与说明书一起用于解释本申请的原理。显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术者来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:The accompanying drawings, which are incorporated in and constitute a part of this specification, illustrate embodiments consistent with the application and together with the description serve to explain the principles of the application. Apparently, the drawings in the following description are only some embodiments of the present application, and those skilled in the art can obtain other drawings based on these drawings without creative efforts. In the attached picture:
图1是本发明实施例中一个车道偏离检测方法的流程示意图;Fig. 1 is a schematic flow chart of a lane departure detection method in an embodiment of the present invention;
图2是本发明实施例中一个服务执行系统的结构示意图;FIG. 2 is a schematic structural diagram of a service execution system in an embodiment of the present invention;
图3是本发明实施例中一个指令字段解析方法的流程示意图;Fig. 3 is a schematic flow chart of an instruction field parsing method in an embodiment of the present invention;
图4是本发明实施例中一个场景数据流的结构示意图;Fig. 4 is a schematic structural diagram of a scene data stream in an embodiment of the present invention;
图5是本发明实施例中另一个车道偏离检测方法的流程示意图;5 is a schematic flowchart of another lane departure detection method in an embodiment of the present invention;
图6是本发明实施例中一个车道偏离检测系统的结构示意图;6 is a schematic structural diagram of a lane departure detection system in an embodiment of the present invention;
图7是本发明实施例中一个车道偏离检测系统的结构示意图;7 is a schematic structural diagram of a lane departure detection system in an embodiment of the present invention;
图8是本发明实施例中一个电子设备的结构示意图。Fig. 8 is a schematic structural diagram of an electronic device in an embodiment of the present invention.
具体实施方式Detailed ways
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的子样本可以相互组合。Embodiments of the present invention are described below through specific examples, and those skilled in the art can easily understand other advantages and effects of the present invention from the content disclosed in this specification. The present invention can also be implemented or applied through other different specific implementation modes, and various modifications or changes can be made to the details in this specification based on different viewpoints and applications without departing from the spirit of the present invention. It should be noted that, in the case of no conflict, the following embodiments and sub-samples in the embodiments may be combined with each other.
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。It should be noted that the diagrams provided in the following embodiments are only schematically illustrating the basic ideas of the present invention, and only the components related to the present invention are shown in the diagrams rather than the number, shape and shape of the components in actual implementation. Dimensional drawing, the type, quantity and proportion of each component can be changed arbitrarily during actual implementation, and the component layout type may also be more complicated.
在下文描述中,探讨了大量细节,以提供对本发明实施例的更透彻的解释,然而,对本领域技术人员来说,可以在没有这些具体细节的情况下实施本发明的实施例是显而易见的,在其他实施例中,以方框图的形式而不是以细节的形式来示出公知的结构和设备,以避免使本发明的实施例难以理解。In the following description, numerous details are discussed in order to provide a more thorough explanation of embodiments of the invention, however, it will be apparent to those skilled in the art that embodiments of the invention can be practiced without these specific details, In other embodiments, well-known structures and devices are shown in block diagram form rather than in detail in order to avoid obscuring the embodiments of the invention.
本公开实施例的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本公开实施例的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含。The terms "first", "second" and the like in the description and claims of the embodiments of the present disclosure and the above drawings are used to distinguish similar objects, and are not necessarily used to describe a specific sequence or sequence. It should be understood that the data so used may be interchanged under appropriate circumstances so as to facilitate the embodiments of the disclosed embodiments described herein. Furthermore, the terms "comprising" and "having", as well as any variations thereof, are intended to cover a non-exclusive inclusion.
除非另有说明,术语“多个”表示两个或两个以上。Unless stated otherwise, the term "plurality" means two or more.
本公开实施例中,字符“/”表示前后对象是一种“或”的关系。例如,A/B表示:A或B。In the embodiments of the present disclosure, the character "/" indicates that the preceding and following objects are an "or" relationship. For example, A/B means: A or B.
术语“和/或”是一种描述对象的关联关系,表示可以存在三种关系。例如,A和/或B,表示:A或B,或,A和B这三种关系。The term "and/or" is an associative relationship describing objects, indicating that there can be three relationships. For example, A and/or B means: A or B, or, A and B, these three relationships.
首先需要说明的是,本公开实施例基于消失点检测技术实现,并作用于车辆的自动驾驶系统。First of all, it should be explained that the embodiment of the present disclosure is implemented based on the vanishing point detection technology, and acts on the automatic driving system of the vehicle.
根据射影几何学原理,现实空间中的平行线段组经过透视投影将会在图像平面相交于同一消失点(VanishingPoint)。消失点检测来源于视觉显著性检测细分领域,作为一种对图像中消失点进行检测的技术,已经得到了比较成熟的研究,应用于三维场景重建、摄像机标定和辅助智能驾驶等领域,能够作为车辆行驶前方的方向信息的收敛点。According to the principle of projective geometry, groups of parallel line segments in real space will intersect at the same vanishing point (Vanishing Point) on the image plane after perspective projection. Vanishing point detection comes from the field of visual saliency detection subdivision. As a technology for detecting vanishing points in images, it has been relatively maturely researched and applied in the fields of 3D scene reconstruction, camera calibration and assisted intelligent driving. As the convergence point of the direction information in front of the vehicle.
消失点检测包括基于空间转换技术的消失点检测、基于交点信息的消失点检测、基于统计算法的消失点检测以及基于投票方式的消失点检测,其中,基于空间转换技术的消失点检测通过将现实图像空间映射到某个有限区域的投影空间,并通过两个空间的映射关系检测消失点;基于交点信息的消失点检测通过计算直线两两相交的交点并进行交点聚类来进行检测;基于统计算法的消失点检测通过消失点特征点构造代价函数来检测图像消失点;基于投票方式的消失点检测利用图像局部纹理特征或者直线边缘信息再通过投票方式实现检测,本公开实施例提供但不仅限于上述消失点检测方法。Vanishing point detection includes vanishing point detection based on space transformation technology, vanishing point detection based on intersection point information, vanishing point detection based on statistical algorithm, and vanishing point detection based on voting method. The image space is mapped to the projection space of a limited area, and the vanishing point is detected through the mapping relationship between the two spaces; the vanishing point detection based on the intersection point information is detected by calculating the intersection point of two-two intersecting lines and performing intersection clustering; based on statistics The vanishing point detection algorithm detects the vanishing point of the image by constructing a cost function of the vanishing point feature points; the vanishing point detection based on the voting method uses the local texture features of the image or the straight line edge information to realize the detection through the voting method. The embodiments of the present disclosure provide but are not limited to The vanishing point detection method described above.
自动驾驶系统是依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,能够让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆的一种汽车系统。自动驾驶系统通常通过视频摄像头、雷达传感器以及激光测距器来了解周围的交通状况,通过一个详尽的地图(通过有人驾驶汽车采集的地图)对前方的道路进行导航,通过通信技术、网络技术、计算机技术和控制技术实现对汽车的实时连续控制,并通过现代通信手段实现车与车之间、车与服务器之间的双向数据通信。The autonomous driving system is a car system that relies on the cooperation of artificial intelligence, visual computing, radar, monitoring devices and global positioning systems to allow computers to automatically and safely operate motor vehicles without any active human operation. The automatic driving system usually understands the surrounding traffic conditions through video cameras, radar sensors, and laser range finders, and navigates the road ahead through a detailed map (map collected by manned cars), through communication technology, network technology, Computer technology and control technology realize the real-time and continuous control of the car, and realize the two-way data communication between cars and between cars and servers through modern communication means.
由于汽车行驶速度较快,自动驾驶系统通常会以秒作作为最小单位进行数据采集和状态刷新,以保证用户的安全和驾驶体验,其中,特定频率通常为0.02s。在其它的应用场景中,针对对象的行进道路的路况进行刷新的频率可以根据实际情况进行设置,本申请的实施例不对此进行限制。Due to the high speed of the car, the automatic driving system usually takes seconds as the minimum unit for data collection and status refresh to ensure the user's safety and driving experience. Among them, the specific frequency is usually 0.02s. In other application scenarios, the frequency of refreshing the road conditions of the traveling road of the object may be set according to actual conditions, which is not limited in this embodiment of the present application.
结合图1所示,本公开实施例提供了一种自动驾驶软件的构架示意图,自动驾驶软件包括自动驾驶信息预处理系统101、自动驾驶控制器102和自动驾驶执行器103,其中,自动驾驶信息预处理系统101用于获取车辆数据,并对车辆数据进行融合;自动驾驶控制器102用于接收自动驾驶信息预处理系统101输出的车辆数据,对接收到的车辆数据进行环境重构、数据预测、行为决策,并通过状态机设置自动驾驶的状态信息,同时,自动驾驶控制器102包括纵向系统和横向系统,横向系统用于管理自动驾驶中的转弯,纵向系统用于管理自动驾驶中的前进和后退,纵向系统需要在车道偏移是对车辆行驶方向进行校正;自动驾驶执行器103包括刹车、发动机、换挡器、报警器和方向盘,刹车、发动机、换挡器、报警器通过自动驾驶控制器102的纵向系统控制,方向盘通过自动驾驶控制器102的横向系统控制。As shown in FIG. 1 , an embodiment of the present disclosure provides a schematic structural diagram of automatic driving software. The automatic driving software includes an automatic driving information preprocessing system 101, an
结合图2所示,本公开实施例提供了一种车道偏离检测方法,包括:As shown in FIG. 2 , an embodiment of the present disclosure provides a lane departure detection method, including:
步骤S201,获取车辆终端在行驶方向上的车道采集图像;Step S201, acquiring the lane acquisition image of the vehicle terminal in the driving direction;
步骤S202,建立行驶方向映射在车道采集图像的基准坐标系;Step S202, establishing a reference coordinate system for mapping the driving direction to collect images in the lane;
步骤S203,识别车道采集图像中车道的车道消失点,得到车道消失点映射在基准坐标系的消失点坐标;Step S203, identifying the lane vanishing point of the lane in the lane collection image, and obtaining the vanishing point coordinates of the lane vanishing point mapped in the reference coordinate system;
步骤S204,确定消失点坐标与行驶方向之间的车道偏移参数,并根据车道偏移参数确定车道偏移检测结果。Step S204, determining the lane deviation parameter between the coordinates of the vanishing point and the driving direction, and determining the lane deviation detection result according to the lane deviation parameter.
采用本公开实施例提供的车道偏离检测方法,通过获取车辆终端在行驶方向上的车道采集图像,并从车道采集图像上识别车道消失点,从而根据消失点坐标与行驶方向之间的车道偏移参数确定车道偏移检测结果,完成车道偏移检测。这样,相较于通过车道线或风险对象检测车道偏离,将消失点作为车辆行驶目标的收敛点,不需要双目摄像头、车载雷达辅助采集数据,同时,即使在车道线不清楚或者无法识别风险对象的情况下依然能够实现车道偏移检测,从而减少了车道偏移检测的识别难度,提高了消失点检测的检测效率。Using the lane departure detection method provided by the embodiments of the present disclosure, by acquiring the lane collection image of the vehicle terminal in the driving direction, and identifying the lane vanishing point from the lane collection image, the lane deviation between the coordinates of the vanishing point and the driving direction The parameter determines the lane deviation detection result and completes the lane deviation detection. In this way, compared to detecting lane departure through lane lines or risk objects, using the vanishing point as the convergence point of the vehicle’s driving target does not require binocular cameras and vehicle radar to assist in data collection. At the same time, even when the lane line is unclear or the risk cannot be identified In the case of the object, the lane deviation detection can still be realized, thereby reducing the identification difficulty of the lane deviation detection and improving the detection efficiency of the vanishing point detection.
可选地,获取车辆终端在行驶方向上的车道采集图像,包括:在车辆终端的中线正前方设置车载摄像头,其中,车载摄像头包括单目摄像头、双目摄像头、红外摄像头等中的一种;通过车载摄像头对车辆终端的正前方进行图像采集,得到车道采集图像。Optionally, acquiring the lane acquisition image of the vehicle terminal in the driving direction includes: setting a vehicle-mounted camera directly in front of the centerline of the vehicle terminal, wherein the vehicle-mounted camera includes one of a monocular camera, a binocular camera, an infrared camera, etc.; The vehicle-mounted camera is used to collect images directly in front of the vehicle terminal to obtain lane collection images.
可选地,建立行驶方向映射在车道采集图像的基准坐标系,包括:获取车道采集图像的图像尺寸,并根据图像尺寸确定车道采集图像的图像中心点;将图像中心点作为坐标系原点建立笛卡尔坐标系,得到基准坐标系,其中,将基准坐标系的纵轴方向作为车辆终端的行驶方向。Optionally, establishing a reference coordinate system for driving direction mapping on the lane collected image includes: obtaining the image size of the lane collected image, and determining the image center point of the lane collected image according to the image size; using the image center point as the origin of the coordinate system to establish the The Karl coordinate system is used to obtain the reference coordinate system, wherein the direction of the vertical axis of the reference coordinate system is used as the driving direction of the vehicle terminal.
可选地,建立行驶方向映射在车道采集图像的基准坐标系,包括:将车辆终端映射在车道采集图像中;将车辆终端作为坐标系原点建立笛卡尔坐标系,得到基准坐标系,其中,将基准坐标系的纵轴方向作为车辆终端的行驶方向。Optionally, establishing a reference coordinate system in which the driving direction is mapped to the lane acquisition image includes: mapping the vehicle terminal in the lane acquisition image; using the vehicle terminal as the origin of the coordinate system to establish a Cartesian coordinate system to obtain the reference coordinate system, wherein The direction of the vertical axis of the reference coordinate system is used as the driving direction of the vehicle terminal.
可选地,建立行驶方向映射在车道采集图像的基准坐标系,包括:根据车道采集图像中车道的两条车道边线确定车道中轴线,并根据车道中轴线的轴线长度确定车道中轴线的轴线中心点;若车道采集图像中车道的车道类型为直线道路,则将轴线中心点作为坐标系原点,并将中轴线确定为笛卡尔坐标系的纵轴,建立笛卡尔坐标系,得到行驶方向映射在车道采集图像的基准坐标系,其中,将基准坐标系的纵轴方向作为车辆终端的行驶方向;若车道采集图像中车道的车道类型为弯曲道路,则将轴线中心点作为坐标系原点,并将与中轴线相切的轴线切线作为笛卡尔坐标系的纵轴,建立笛卡尔坐标系,得到行驶方向映射在车道采集图像的基准坐标系,其中,将基准坐标系的纵轴方向作为车辆终端的行驶方向。Optionally, establishing the reference coordinate system of the driving direction mapping in the lane acquisition image includes: determining the lane central axis according to the two lane sidelines of the lane in the lane acquisition image, and determining the axis center of the lane central axis according to the axis length of the lane central axis point; if the lane type of the lane in the lane collection image is a straight road, the center point of the axis is taken as the origin of the coordinate system, and the central axis is determined as the longitudinal axis of the Cartesian coordinate system, and the Cartesian coordinate system is established to obtain the driving direction mapping in The reference coordinate system of the lane acquisition image, wherein, the direction of the longitudinal axis of the reference coordinate system is used as the driving direction of the vehicle terminal; if the lane type of the lane in the lane acquisition image is a curved road, the center point of the axis is taken as the origin of the coordinate system, and The axis tangent line tangent to the central axis is used as the longitudinal axis of the Cartesian coordinate system, and the Cartesian coordinate system is established to obtain the reference coordinate system in which the driving direction is mapped on the lane to collect images, wherein the direction of the longitudinal axis of the reference coordinate system is used as the direction of the vehicle terminal direction of travel.
可选地,获取车辆终端在行驶方向上的车道采集图像之后,识别车道采集图像中车道的车道消失点之前,方法还包括:对车道采集图像进行图像预处理,其中,图像预处理包括图像去噪、提高图像清晰度、图像尺寸归一化中的至少一种。Optionally, after acquiring the lane acquisition image of the vehicle terminal in the driving direction and before identifying the lane vanishing point of the lane in the lane acquisition image, the method further includes: performing image preprocessing on the lane acquisition image, wherein the image preprocessing includes image removal At least one of noise, image definition improvement, and image size normalization.
可选地,结合图3所示,识别车道采集图像中车道的车道消失点,包括:从车道采集图像中提取局部纹理特征;根据局部纹理特征中的差分激励分量从车道采集图像中确定道路显著区域;基于线性投票模式,通过局部纹理特征中的方向分量和道路显著区域确定车道采集图像中的车道消失点。Optionally, as shown in FIG. 3, identifying the lane vanishing point of the lane in the lane acquisition image includes: extracting local texture features from the lane acquisition image; Region; Based on the linear voting mode, the lane vanishing point in the lane acquisition image is determined by the direction component in the local texture feature and the salient area of the road.
可选地,结合图4所示,识别车道采集图像中车道的车道消失点,还包括:若车道采集图像中车道的车道类型为直线道路,则将车道采集图像中车道的两条车道边线的交汇点作为车道采集图像中的车道消失点;若车道采集图像中车道的车道类型为弯曲道路,则将车道采集图像中车道的两条车道边线划分为内侧边线和外侧边线,确定与内侧边线相切的内侧切线,并将内侧切线与外侧边线的交汇点作为车道采集图像中的车道消失点。Optionally, as shown in FIG. 4 , identifying the lane vanishing point of the lane in the lane collection image further includes: if the lane type of the lane in the lane collection image is a straight road, the two lane sidelines of the lane in the lane collection image are The intersection point is used as the lane vanishing point in the lane acquisition image; if the lane type of the lane in the lane acquisition image is a curved road, the two lane edges of the lane in the lane acquisition image are divided into the inner edge line and the outer edge line, and the inner edge line and the inner edge line are determined. The inner tangent of the tangent, and the intersection point of the inner tangent and the outer edge is used as the lane vanishing point in the lane acquisition image.
在一些实施例中,消失点在很大程度上反应了车辆驾驶员视野下的前进方向,在视野开阔的、道路笔直的道路场景下,当消失点位于道路图像的左上方或者左下方时,表示车道向左偏离,车辆需要调整方向跟随左方消失点行驶。当消失点在图像正中央时,表示车道没有偏离,在驾驶员视线正前方,当消失点位于道路图像的右上方或者右下方时,表示车辆需要调整方向跟随道路向右行驶。In some embodiments, the vanishing point largely reflects the forward direction of the vehicle driver's field of vision. In a road scene with a wide field of view and a straight road, when the vanishing point is located at the upper left or lower left of the road image, Indicates that the lane deviates to the left, and the vehicle needs to adjust its direction to follow the vanishing point on the left. When the vanishing point is in the center of the image, it means that the lane has not deviated. When it is directly in front of the driver's line of sight, when the vanishing point is in the upper right or lower right of the road image, it means that the vehicle needs to adjust its direction and follow the road to the right.
可选地,基准坐标系的纵轴用于表征车辆终端的行驶方向,确定消失点坐标与行驶方向之间的车道偏移参数,包括以下至少一种:建立消失点坐标与基准坐标系的原点之间的参考线,将参考线与基准坐标系的纵轴之间的内角角度作为消失点坐标与行驶方向之间的车道偏移参数;确定消失点坐标与基准坐标系的纵轴之间的最短距离,将最短距离作为消失点坐标与行驶方向之间的车道偏移参数。Optionally, the vertical axis of the reference coordinate system is used to represent the driving direction of the vehicle terminal, and the lane offset parameter between the coordinates of the vanishing point and the driving direction is determined, including at least one of the following: establishing the coordinates of the vanishing point and the origin of the reference coordinate system Between the reference line, the internal angle between the reference line and the longitudinal axis of the reference coordinate system is used as the lane offset parameter between the vanishing point coordinates and the driving direction; determine the distance between the vanishing point coordinates and the longitudinal axis of the reference coordinate system The shortest distance, using the shortest distance as the lane offset parameter between the coordinates of the vanishing point and the direction of travel.
结合图5所示,将参考线与基准坐标系的纵轴之间的内角角度(即消失点在基准坐标系垂直方向上面的投影偏移角度)作为消失点坐标与行驶方向之间的车道偏移参数,由于车道偏离检测主要关注左右方向上面的偏移情况,因此车辆高度、摄像头安装俯仰角以及上下坡道路等因素不影响车道偏移度量的准确性,以行驶方向作为坐标系纵轴建立笛卡尔坐标系,能够简化车道偏移参数的复杂性,其中,当消失点位于基准坐标系的第一象限时,车道偏移参数为Degreevp1;当消失点位于基准坐标系的第二象限时,车道偏移参数为Degreevp2;当消失点位于基准坐标系的第三象限时,车道偏移参数为Degreevp3;当消失点位于基准坐标系的第四象限时,车道偏移参数为Degreevp4;通过Degreevp作为综合计算后的车道偏移参数。As shown in Figure 5, the interior angle between the reference line and the longitudinal axis of the reference coordinate system (that is, the projection offset angle of the vanishing point on the vertical direction of the reference coordinate system) is used as the lane deviation between the vanishing point coordinates and the driving direction. Since lane departure detection mainly focuses on the deviation in the left and right directions, factors such as vehicle height, camera installation pitch angle, and uphill and downhill roads do not affect the accuracy of lane deviation measurement. The driving direction is used as the vertical axis of the coordinate system to establish Cartesian coordinate system, which can simplify the complexity of lane offset parameters, wherein, when the vanishing point is located in the first quadrant of the reference coordinate system, the lane offset parameter is Degreevp1 ; when the vanishing point is located in the second quadrant of the reference coordinate system , the lane offset parameter is Degreevp2 ; when the vanishing point is in the third quadrant of the reference coordinate system, the lane offset parameter is Degreevp3 ; when the vanishing point is in the fourth quadrant of the reference coordinate system, the lane offset parameter is Degreevp4 ; Use Degreevp as the comprehensively calculated lane offset parameter.
在一些实施例中,本公开实施例通过基准坐标系和车道偏移参数简化了道路图像坐标系和车身坐标系之间的运算,由于车道偏离检测主要关注水平方向上面的行驶方向偏离趋势,所以车身坐标系垂直方向上的平移不会改变水平方向上面的投影偏移角计算,因此将车身坐标系的水平面平移到道路图像坐标系的水平轴的一个平面上,同时在道路图像坐标系中以图像几何坐标中心点为原点建立坐标系,从而可以用图像坐标消失点偏离道路图像坐标系垂直方向上的角度相对值作为车道偏离判断的依据,屏蔽车身高度的影响和摄像头本身具有安装上下仰角导致的差异和复杂的坐标系转换计算,提高车道偏离角度计算的效率。In some embodiments, the embodiment of the present disclosure simplifies the calculation between the road image coordinate system and the vehicle body coordinate system through the reference coordinate system and the lane deviation parameter. Since the lane departure detection mainly focuses on the deviation trend of the driving direction above the horizontal direction, The translation in the vertical direction of the vehicle body coordinate system will not change the projection offset angle calculation above the horizontal direction, so the horizontal plane of the vehicle body coordinate system is translated to a plane of the horizontal axis of the road image coordinate system, and at the same time in the road image coordinate system as The center point of the geometric coordinates of the image is used as the origin to establish a coordinate system, so that the relative value of the angle that the vanishing point of the image coordinates deviates from the vertical direction of the road image coordinate system can be used as the basis for judging lane departure, shielding the influence of the height of the vehicle body and the camera itself having an installation and elevation angle. Differences and complex coordinate system conversion calculations improve the efficiency of lane departure angle calculations.
可选地,根据车道偏移参数确定车道偏移检测结果,包括:若车道偏移参数大于或等于预设的偏移参数阈值,则将车道偏移检测结果确定为发生车道偏移,并确定车道消失点位于基准坐标系的象限区域,根据象限区域确定车道偏移方向;若车道偏移参数小于预设的偏移参数阈值,则将车道偏移检测结果确定为车道未偏移。Optionally, determining the lane deviation detection result according to the lane deviation parameter includes: if the lane deviation parameter is greater than or equal to a preset deviation parameter threshold, determining the lane deviation detection result as lane deviation, and determining The lane vanishing point is located in the quadrant area of the reference coordinate system, and the lane offset direction is determined according to the quadrant area; if the lane offset parameter is less than the preset offset parameter threshold, the lane offset detection result is determined as the lane is not offset.
在一些实施例中,若车道偏移参数包括内角角度,则偏移参数阈值为5°至30°。In some embodiments, if the lane deviation parameter includes an interior angle, the deviation parameter threshold is 5° to 30°.
在一些实施例中,将综合计算后的车道偏移参数Degreevp与预设的偏移参数阈值Degreeth进行对比,当Degreevp大于或等于Degreeth阈值时,表示车道偏离程度超过预警阈值需要进行预警,当消失点位于道路图像坐标系的第一和第四象限时,表示车辆对于车道偏左,当消失点位于第二和第三象限时,表示车辆对于车道偏右。In some embodiments, the comprehensively calculated lane deviation parameter Degreevp is compared with the preset deviation parameter threshold Degreeth , and when Degreevp is greater than or equal to the Degreeth threshold, it means that the lane deviation degree exceeds the warning threshold and needs to be carried out. For early warning, when the vanishing point is located in the first and fourth quadrants of the road image coordinate system, it means that the vehicle is drifting to the left of the lane, and when the vanishing point is in the second and third quadrants, it means that the vehicle is drifting to the right of the lane.
可选地,若车道偏移检测结果包括发生车道偏移,方法还包括以下至少一种:采集车辆终端的实际校正角度,直到车道偏移检测结果包括车道未偏移,并根据采集到的实际校正角度与预设的期望预警角度之间的比较结果对偏移参数阈值进行调整;采集车辆终端的实际校正角度,直到车道偏移检测结果包括车道未偏移,并将采集到的实际校正角度与预设的期望预警角度进行比较,得到期望比较结果,若获取到的比较结果的数量大于预设数量阈值,则根据各期望比较结果确定偏移参数阈值的置信度,根据置信度与预设的初始置信度阈值之间的比较结果对偏移参数阈值进行调整;向用户展示车道偏移检测结果,并采集车道偏移检测结果对应的用户反馈信息,若用户反馈信息包括结果不正确,则根据预设调整比例对偏移参数阈值进行调整。Optionally, if the lane deviation detection result includes lane deviation, the method further includes at least one of the following: collecting the actual correction angle of the vehicle terminal until the lane deviation detection result includes no lane deviation, and according to the collected actual The comparison result between the correction angle and the preset expected warning angle adjusts the offset parameter threshold; collects the actual correction angle of the vehicle terminal until the lane deviation detection result includes the lane is not offset, and collects the actual correction angle Compared with the preset expected early warning angle, the expected comparison result is obtained. If the number of obtained comparison results is greater than the preset number threshold, the confidence degree of the offset parameter threshold is determined according to each expected comparison result. According to the confidence degree and the preset The comparison result between the initial confidence thresholds adjusts the offset parameter threshold; displays the lane offset detection results to the user, and collects user feedback information corresponding to the lane offset detection results. If the user feedback information includes incorrect results, then The offset parameter threshold is adjusted according to a preset adjustment ratio.
在一些实施例中,根据采集到的实际校正角度与预设的期望预警角度之间的比较结果对偏移参数阈值进行调整,包括:若采集到的实际校正角度大于预设的期望预警角度,则根据预设调整比例减少偏移参数阈值;若采集到的实际校正角度等于预设的期望预警角度,则不调整偏移参数阈值;若采集到的实际校正角度小于预设的期望预警角度,则根据预设调整比例增加偏移参数阈值。In some embodiments, the offset parameter threshold is adjusted according to the comparison result between the collected actual correction angle and the preset expected warning angle, including: if the collected actual correction angle is greater than the preset expected warning angle, Then reduce the offset parameter threshold according to the preset adjustment ratio; if the actual correction angle collected is equal to the preset expected early warning angle, then the offset parameter threshold will not be adjusted; if the collected actual correction angle is less than the preset expected early warning angle, Then increase the offset parameter threshold according to the preset adjustment ratio.
在一些实施例中,预设数量阈值为3-20。In some embodiments, the preset number threshold is 3-20.
在一些实施例中,根据各比较结果确定偏移参数阈值的置信度,包括:若比较结果为实际校正角度大于期望预警角度,则增加一个单位的置信度;若比较结果为实际校正角度等于期望预警角度,则保持当前置信度;若比较结果为实际校正角度小于期望预警角度,则减少一个单位的置信度。In some embodiments, determining the confidence level of the offset parameter threshold according to each comparison result includes: if the comparison result is that the actual correction angle is greater than the expected early warning angle, then increasing the confidence level by one unit; if the comparison result is that the actual correction angle is equal to the expected warning angle If the warning angle is smaller than the warning angle, the current confidence level is maintained; if the comparison result shows that the actual correction angle is smaller than the expected warning angle, the confidence level is reduced by one unit.
在一些实施例中,根据置信度与预设的初始置信度阈值之间的比较结果对偏移参数阈值进行调整,包括:若置信度大于初始置信度阈值,则根据预设调整比例减少偏移参数阈值;若置信度等于初始置信度阈值,则不调整偏移参数阈值;若置信度小于初始置信度阈值,则根据预设调整比例增加偏移参数阈值。In some embodiments, adjusting the offset parameter threshold according to the comparison result between the confidence level and a preset initial confidence level threshold includes: if the confidence level is greater than the initial confidence level threshold, reducing the offset according to a preset adjustment ratio Parameter threshold; if the confidence is equal to the initial confidence threshold, the offset parameter threshold is not adjusted; if the confidence is smaller than the initial confidence threshold, the offset parameter threshold is increased according to the preset adjustment ratio.
在一些实施例中,车辆通过车联网的大数据处理中心上报各自的实际校正角度,基于实际校正角度对偏移参数阈值进行调整,并将调整后的偏移参数阈值通过车辆OTA升级中或者车云远程控制指令进行下发,提高预警的准确性和车辆的驾驶体验。In some embodiments, the vehicles report their respective actual correction angles through the big data processing center of the Internet of Vehicles, adjust the offset parameter thresholds based on the actual correction angles, and pass the adjusted offset parameter thresholds through vehicle OTA upgrades or vehicle Cloud remote control commands are issued to improve the accuracy of early warning and the driving experience of the vehicle.
在一些实施例中,通过监听驾驶员的用户反馈信息修正基于消失点检测的车道偏移预警模型相关参数,如果采用的是语音和图像报警提示,在播报完本次预警提示后,询问驾驶员本次预警提示的准确性,驾驶员只需要向车载智能机器人简单地回答是或者不是;如果驾驶员认为本次导航准确,则不需要进行阈值更新处理;如果驾驶员认为本次预警不准备或者是错误预警,就采用预设调整比例(实际运行阈值的1%)对偏移参数阈值进行范围缩小修正,直到收敛到一个比较准确的临界点,同时,调整量不能超过Degreeth的一半,避免Degreeth出现过小甚至趋近于零的极端场景,从而优化检测方法,提高检测和预警准确性。In some embodiments, the relevant parameters of the lane departure warning model based on vanishing point detection are corrected by monitoring the driver's user feedback information. If voice and image warning prompts are used, after the warning prompt is broadcast, the driver is asked The driver only needs to simply answer yes or no to the on-board intelligent robot for the accuracy of the warning prompt; if the driver thinks that the navigation is accurate, there is no need to update the threshold; if the driver thinks that the warning is not ready or If it is an error warning, the preset adjustment ratio (1% of the actual operating threshold) is used to narrow the range of the offset parameter threshold until it converges to a more accurate critical point. At the same time, the adjustment amount cannot exceed half of the Degreeth , to avoid Degreeth is too small or even close to zero in extreme scenarios, so as to optimize the detection method and improve the accuracy of detection and early warning.
可选地,若车道偏移检测结果包括发生车道偏移,方法还包括:获取车辆终端的方向盘角度,根据方向盘角度的方向与车道偏移方向之间的对比文件确定预警抑制状态;若预警抑制状态为预警抑制开启,则在预设时间段之后重新确定车道偏移检测结果;若预警抑制状态为预警抑制关闭,则通过预设预警方式进行车道偏移提示,和/或,根据车道偏移方向控制车辆终端的纵向行驶方向,直到车道偏移检测结果包括车道未偏移。Optionally, if the lane deviation detection result includes the occurrence of lane deviation, the method further includes: obtaining the steering wheel angle of the vehicle terminal, and determining the warning suppression state according to the comparison file between the steering wheel angle direction and the lane deviation direction; if the warning suppression If the state is that the warning suppression is on, the lane departure detection result will be re-determined after the preset time period; The direction controls the longitudinal travel direction of the vehicle terminal until the lane deviation detection result includes no lane deviation.
在一些实施例中,通过方向盘的左右信号信息来抑制部分报警,比如车辆对于车道偏右的预警同时方向盘是在向左打方向盘,就暂时先关闭预警提示N秒钟,N秒过后取消预警抑制并重新开始正常检测,同时也可以利用偏离车道线的距离数据进行预警抑制,如果距离大于某个距离阈值,也可以暂时抑制预警,最后通过整体系统配置开关等驾驶员交互操作暂停或者关闭车道偏离检测功能,根据确定的预警抑制状态通知预警提示输出设备和装置,或把车道偏移检测结果反馈给智能驾驶决策中心进行处理和应用。In some embodiments, some alarms are suppressed through the left and right signal information of the steering wheel. For example, if the vehicle warns of the right lane while the steering wheel is turning the steering wheel to the left, the warning prompt is temporarily turned off for N seconds, and the warning suppression is canceled after N seconds And restart the normal detection. At the same time, the distance data from the lane departure can also be used for early warning suppression. If the distance is greater than a certain distance threshold, the early warning can also be temporarily suppressed. Finally, the overall system configuration switch and other driver interaction operations are used to suspend or close the lane departure. The detection function notifies the warning prompt output device and device according to the determined warning suppression state, or feeds back the lane deviation detection result to the intelligent driving decision-making center for processing and application.
在一些实施例中,预设预警方式包括发送预警信息通知车载音响设备进行预先配置好的预警提示声音播报,控制显示屏显示虚拟的车道线跳动变红报警,直到预警自动消除或者驾驶员交互操作恢复正常。In some embodiments, the preset early warning method includes sending early warning information to notify the car audio equipment to perform a pre-configured early warning prompt sound broadcast, and controlling the display to display the virtual lane line jumping and turning red for an alarm until the early warning is automatically eliminated or the driver interacts. Back to normal.
结合图6所示,本公开实施例提供了一种车道偏离检测方法,包括:As shown in FIG. 6 , an embodiment of the present disclosure provides a lane departure detection method, including:
步骤S601,获取车辆终端在行驶方向上的车道采集图像;Step S601, acquiring the lane acquisition image of the vehicle terminal in the driving direction;
步骤S602,将车道采集图像的图像中心点作为坐标系原点,建立笛卡尔坐标系,得到基准坐标系;Step S602, taking the image center point of the lane collected image as the origin of the coordinate system, establishing a Cartesian coordinate system, and obtaining a reference coordinate system;
其中,将基准坐标系的纵轴方向作为车辆终端的行驶方向;Wherein, the direction of the longitudinal axis of the reference coordinate system is taken as the driving direction of the vehicle terminal;
步骤S603,识别车道采集图像中车道的车道消失点;Step S603, identifying the lane vanishing point of the lane in the lane acquisition image;
其中,消失点识别包括对车道采集图像进行图像预处理;从车道采集图像中提取局部纹理特征;根据局部纹理特征中的差分激励分量从车道采集图像中确定道路显著区域;基于线性投票模式,通过局部纹理特征中的方向分量和道路显著区域确定车道采集图像中的车道消失点;Among them, the vanishing point recognition includes image preprocessing of the lane acquisition image; extracting local texture features from the lane acquisition image; determining the salient area of the road from the lane acquisition image according to the differential excitation component in the local texture feature; based on the linear voting mode, through The direction component in the local texture feature and the salient area of the road determine the lane vanishing point in the lane acquisition image;
步骤S604,将消失点在基准坐标系垂直方向上面的投影偏移角度作为消失点坐标与行驶方向之间的车道偏移参数;Step S604, using the projected offset angle of the vanishing point on the vertical direction of the reference coordinate system as the lane offset parameter between the coordinates of the vanishing point and the driving direction;
步骤S605,判断车道偏移参数是否大于或等于预设的偏移参数阈值,若否,跳转步骤S606,若是,跳转步骤S607;Step S605, judging whether the lane deviation parameter is greater than or equal to the preset deviation parameter threshold, if not, skip to step S606, if yes, skip to step S607;
步骤S606,将车道偏移检测结果确定为车道未偏移。Step S606, determining the lane deviation detection result as no lane deviation.
步骤S607,将车道偏移检测结果确定为发生车道偏移,跳转步骤S608和步骤S610;Step S607, determine the lane deviation detection result as lane deviation, skip to step S608 and step S610;
步骤S608,采集车辆终端的实际校正角度,直到车道偏移检测结果包括车道未偏移;Step S608, collecting the actual correction angle of the vehicle terminal until the lane deviation detection result includes no lane deviation;
步骤S609,根据采集到的实际校正角度与预设的期望预警角度之间的比较结果对偏移参数阈值进行调整。Step S609, adjusting the offset parameter threshold according to the comparison result between the collected actual correction angle and the preset expected warning angle.
步骤S610,根据方向盘角度的方向与车道偏移方向之间的对比文件确定预警抑制状态;Step S610, according to the comparison file between the direction of the steering wheel angle and the direction of the lane deviation, determine the pre-warning suppression state;
步骤S611,判断预警抑制状态是否为预警抑制开启,若是,跳转步骤S612,若否,跳转步骤S613和步骤614;Step S611, judging whether the pre-warning suppression status is early warning suppression enabled, if so, skip to step S612, if not, skip to step S613 and step 614;
步骤S612,在预设时间段之后重新确定车道偏移检测结果。Step S612, re-determining the lane departure detection result after a preset time period.
步骤S613,根据车道偏移方向控制车辆终端的纵向行驶方向,直到车道偏移检测结果包括车道未偏移。Step S613, controlling the longitudinal traveling direction of the vehicle terminal according to the lane deviation direction until the lane deviation detection result includes no lane deviation.
步骤S614,通过预设预警方式进行车道偏移提示,直到车道偏移检测结果包括车道未偏移;Step S614, prompting the lane deviation through the preset early warning method until the detection result of the lane deviation includes no deviation of the lane;
步骤S615,采集车道偏移检测结果对应的用户反馈信息;Step S615, collecting user feedback information corresponding to the lane deviation detection result;
步骤S616,若用户反馈信息包括结果不正确,则根据预设调整比例对偏移参数阈值进行调整。Step S616, if the user feedback information contains incorrect results, then adjust the offset parameter threshold according to the preset adjustment ratio.
采用本公开实施例提供的车道偏离检测方法,通过获取车辆终端在行驶方向上的车道采集图像,并从车道采集图像上识别车道消失点,从而根据消失点坐标与行驶方向之间的车道偏移参数确定车道偏移检测结果,完成车道偏移检测,具有以下优点:Using the lane departure detection method provided by the embodiments of the present disclosure, by acquiring the lane collection image of the vehicle terminal in the driving direction, and identifying the lane vanishing point from the lane collection image, the lane deviation between the coordinates of the vanishing point and the driving direction The parameters determine the lane deviation detection result and complete the lane deviation detection, which has the following advantages:
第一、相较于通过车道线或风险对象检测车道偏离,将消失点作为车辆行驶目标的收敛点,不需要双目摄像头、车载雷达辅助采集数据,同时,即使在车道线不清楚或者无法识别风险对象的情况下依然能够实现车道偏移检测,从而减少了车道偏移检测的识别难度,提高了消失点检测的检测效率;First, compared to detecting lane departure through lane lines or risk objects, using the vanishing point as the convergence point of the vehicle’s driving target does not require binocular cameras and vehicle radar to assist in data collection. At the same time, even if the lane line is unclear or unrecognizable In the case of risky objects, lane deviation detection can still be realized, thereby reducing the identification difficulty of lane deviation detection and improving the detection efficiency of vanishing point detection;
第二、在道路图像坐标系中以图像几何坐标中心点为原点建立坐标系,从而可以用图像坐标消失点偏离道路图像坐标系垂直方向上的角度相对值作为车道偏离判断的依据,屏蔽车身高度的影响和摄像头本身具有安装上下仰角导致的差异和复杂的坐标系转换计算,提高车道偏离角度计算的效率;Second, in the road image coordinate system, the coordinate system is established with the image geometric coordinate center point as the origin, so that the relative value of the angle at which the image coordinate vanishing point deviates from the road image coordinate system in the vertical direction can be used as the basis for lane departure judgment, and the vehicle body height can be shielded The influence of the camera itself and the difference caused by the installation of the upper and lower elevation angles and complex coordinate system conversion calculations improve the efficiency of lane departure angle calculations;
第三、采集车辆校对数据,根据车辆校对数据调整便宜参数阈值,以优化检测方法,提高检测和预警准确性;Third, collect vehicle calibration data, and adjust cheap parameter thresholds based on vehicle calibration data to optimize detection methods and improve detection and early warning accuracy;
第四、建立预警抑制机制,提高预警的灵活性以及驾驶员的驾驶体验。Fourth, establish an early warning suppression mechanism to improve the flexibility of early warning and the driver's driving experience.
结合图7所示,本公开实施例提供了一种车道偏离检测系统,包括获取模块701、建立模块702、失败模块703和确定模块704。获取模块701用于获取车辆终端在行驶方向上的车道采集图像;建立模块702用于建立行驶方向映射在车道采集图像的基准坐标系;失败模块703用于识别车道采集图像中车道的车道消失点,得到车道消失点映射在基准坐标系的消失点坐标;确定模块704用于确定消失点坐标与行驶方向之间的车道偏移参数,并根据车道偏移参数确定车道偏移检测结果。As shown in FIG. 7 , an embodiment of the present disclosure provides a lane departure detection system, including an
采用本公开实施例提供的车道偏离检测系统,通过获取车辆终端在行驶方向上的车道采集图像,并从车道采集图像上识别车道消失点,从而根据消失点坐标与行驶方向之间的车道偏移参数确定车道偏移检测结果,完成车道偏移检测。这样,相较于通过车道线或风险对象检测车道偏离,将消失点作为车辆行驶目标的收敛点,不需要双目摄像头、车载雷达辅助采集数据,同时,即使在车道线不清楚或者无法识别风险对象的情况下依然能够实现车道偏移检测,从而减少了车道偏移检测的识别难度,提高了消失点检测的检测效率。Using the lane departure detection system provided by the embodiments of the present disclosure, by acquiring the lane collection image of the vehicle terminal in the driving direction, and identifying the lane vanishing point from the lane collection image, according to the lane deviation between the coordinates of the vanishing point and the driving direction The parameter determines the lane deviation detection result and completes the lane deviation detection. In this way, compared to detecting lane departure through lane lines or risk objects, using the vanishing point as the convergence point of the vehicle’s driving target does not require binocular cameras and vehicle radar to assist in data collection. At the same time, even when the lane line is unclear or the risk cannot be identified In the case of the object, the lane deviation detection can still be realized, thereby reducing the identification difficulty of the lane deviation detection and improving the detection efficiency of the vanishing point detection.
图8示出了适于用来实现本申请实施例的电子设备的计算机系统的结构示意图。需要说明的是,图8示出的电子设备的计算机系统800仅是一个示例,不应对本申请实施例的功能和使用范围带来任何限制。FIG. 8 shows a schematic structural diagram of a computer system suitable for implementing the electronic device of the embodiment of the present application. It should be noted that the
如图8所示,计算机系统800包括中央处理单元(CentralProcessingUnit,CPU)801,其可以根据存储在只读存储器(Read-OnlyMemory,ROM)802中的程序或者从储存部分808加载到随机访问存储器(RandomAccessMemory,RAM)803中的程序而执行各种适当的动作和处理,例如执行上述实施例中的方法。在RAM803中,还存储有系统操作所需的各种程序和数据。CPU801、ROM802以及RAM803通过总线804彼此相连。输入/输出(Input/Output,I/O)接口805也连接至总线804。As shown in FIG. 8, a
以下部件连接至I/O接口805:包括键盘、鼠标等的输入部分806;包括诸如阴极射线管(CathodeRayTube,CRT)、液晶显示器(LiquidCrystalDisplay,LCD)等以及扬声器等的输出部分807;包括硬盘等的储存部分808;以及包括诸如LAN(LocalAreaNetwork,局域网)卡、调制解调器等的网络接口卡的通信部分809。通信部分809经由诸如因特网的网络执行通信处理。驱动器810也根据需要连接至I/O接口805。可拆卸介质811,诸如磁盘、光盘、磁光盘、半导体存储器等等,根据需要安装在驱动器810上,以便于从其上读出的计算机程序根据需要被安装入储存部分808。The following components are connected to the I/O interface 805: an
特别地,根据本申请的实施例,上文参考流程图描述的过程可以被实现为计算机软件程序。例如,本申请的实施例包括一种计算机程序产品,其包括承载在计算机可读介质上的计算机程序,该计算机程序包含用于执行流程图所示的方法的计算机程序。在这样的实施例中,该计算机程序可以通过通信部分809从网络上被下载和安装,和/或从可拆卸介质811被安装。在该计算机程序被中央处理单元(CPU)801执行时,执行本申请的系统中限定的各种功能。In particular, according to the embodiments of the present application, the processes described above with reference to the flowcharts can be implemented as computer software programs. For example, the embodiments of the present application include a computer program product, which includes a computer program carried on a computer-readable medium, where the computer program includes a computer program for executing the method shown in the flowchart. In such an embodiment, the computer program may be downloaded and installed from a network via
需要说明的是,本申请实施例所示的计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质或者是上述两者的任意组合。计算机可读存储介质例如可以是电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子可以包括但不限于:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机访问存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(Erasable ProgrammableReadOnlyMemory,EPROM)、闪存、光纤、便携式紧凑磁盘只读存储器(CompactDiscRead-OnlyMemory,CD-ROM)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本申请中,计算机可读的信号介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了计算机可读的计算机程序。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。计算机可读的信号介质还可以是计算机可读存储介质以外的任何计算机可读介质,该计算机可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。计算机可读介质上包含的计算机程序可以用任何适当的介质传输,包括但不限于:无线、有线等等,或者上述的任意合适的组合。It should be noted that the computer-readable medium shown in the embodiment of the present application may be a computer-readable signal medium or a computer-readable storage medium, or any combination of the two. A computer-readable storage medium may be, for example, an electrical, magnetic, optical, electromagnetic, infrared, or semiconductor system, device, or device, or any combination thereof. More specific examples of computer-readable storage media may include, but are not limited to, electrical connections with one or more wires, portable computer diskettes, hard disks, random access memory (RAM), read-only memory (ROM), erasable Programmable Read-Only Memory (Erasable ProgrammableReadOnlyMemory, EPROM), flash memory, optical fiber, portable compact disk read-only memory (CompactDiscRead-OnlyMemory, CD-ROM), optical storage device, magnetic storage device, or any suitable combination of the above. In this application, a computer-readable signal medium may include a data signal propagated in baseband or as part of a carrier wave, carrying a computer-readable computer program thereon. Such propagated data signals may take many forms, including but not limited to electromagnetic signals, optical signals, or any suitable combination of the foregoing. A computer-readable signal medium may also be any computer-readable medium other than a computer-readable storage medium, which can send, propagate, or transmit a program for use by or in conjunction with an instruction execution system, apparatus, or device. . A computer program embodied on a computer readable medium can be transmitted using any appropriate medium, including but not limited to: wireless, wired, etc., or any suitable combination of the above.
本公开实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本实施例中的任一项方法。An embodiment of the present disclosure also provides a computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, any method in the present embodiment is implemented.
本公开实施例中的计算机可读存储介质,本领域普通技术人员可以理解:实现上述各方法实施例的全部或部分步骤可以通过计算机程序相关的硬件来完成。前述的计算机程序可以存储于一计算机可读存储介质中。该程序在执行时,执行包括上述各方法实施例的步骤;而前述的存储介质包括:ROM、RAM、磁碟或者光盘等各种可以存储程序代码的介质。As for the computer-readable storage medium in the embodiments of the present disclosure, those skilled in the art can understand that all or part of the steps in the above-mentioned method embodiments can be completed by hardware related to computer programs. The aforementioned computer program can be stored in a computer-readable storage medium. When the program is executed, it executes the steps including the above-mentioned method embodiments; and the aforementioned storage medium includes: ROM, RAM, magnetic disk or optical disk and other various media that can store program codes.
本实施例公开的电子设备,包括处理器、存储器、收发器和通信接口,存储器和通信接口与处理器和收发器连接并完成相互间的通信,存储器用于存储计算机程序,通信接口用于进行通信,处理器和收发器用于运行计算机程序,使电子设备执行如上方法的各个步骤。The electronic device disclosed in this embodiment includes a processor, a memory, a transceiver, and a communication interface. The memory and the communication interface are connected to the processor and the transceiver to complete mutual communication. The memory is used to store computer programs, and the communication interface is used to perform For communication, the processor and the transceiver are used to run the computer program to make the electronic equipment perform the steps of the above method.
在本实施例中,存储器可能包含随机存取存储器(RandomAccessMemory,简称RAM),也可能还包括非易失性存储器(non-volatilememory),例如至少一个磁盘存储器。In this embodiment, the memory may include a random access memory (Random Access Memory, RAM for short), and may also include a non-volatile memory (non-volatile memory), such as at least one disk memory.
上述的处理器可以是通用处理器,包括中央处理器(CentralProcessingUnit,简称CPU)、图形处理器(GraphicsProcessingUnit,简称GPU),网络处理器(NetworkProcessor,简称NP)等;还可以是数字信号处理器(DigitalSignalProcessing,简称DSP)、专用集成电路(ApplicationSpecificIntegratedCircuit,简称ASIC)、现场可编程门阵列(Field-Programmable GateArray,简称FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。The above-mentioned processor can be a general-purpose processor, including a central processing unit (Central Processing Unit, referred to as CPU), a graphics processing unit (Graphics Processing Unit, referred to as GPU), a network processor (Network Processor, referred to as NP), etc.; it can also be a digital signal processor ( DigitalSignalProcessing, referred to as DSP), application specific integrated circuit (ApplicationSpecificIntegratedCircuit, referred to as ASIC), field programmable gate array (Field-Programmable GateArray, referred to as FPGA) or other programmable logic devices, discrete gate or transistor logic devices, discrete hardware components.
以上描述和附图充分地示出了本公开的实施例,以使本领域的技术人员能够实践它们。其他实施例可以包括结构的、逻辑的、电气的、过程的以及其他的改变。实施例仅代表可能的变化。除非明确要求,否则单独的部件和功能是在本申请一实施例中,并且操作的顺序可以变化。一些实施例的部分和子样本可以被包括在或替换其他实施例的部分和子样本。而且,本申请中使用的用词仅用于描述实施例并且不用于限制权利要求。如在实施例以及权利要求的描述中使用的,除非上下文清楚地表明,否则单数形式的“一个”(a)、“一个”(an)和“”(the)旨在同样包括复数形式。类似地,如在本申请中所使用的术语“和/或”是指包含一个或一个以上相关联的列出的任何以及所有可能的组合。另外,当用于本申请中时,术语“包括”(comprise)及其变型“包括”(comprises)和/或包括(comprising)等指陈述的子样本、整体、步骤、操作、元素,和/或组件的存在,但不排除一个或一个以上其它子样本、整体、步骤、操作、元素、组件和/或这些的分组的存在或添加。在没有更多限制的情况下,由语句“包括一个…”限定的要素,并不排除在包括要素的过程、方法或者设备中还存在另外的相同要素。本文中,每个实施例重点说明的可以是与其他实施例的不同之处,各个实施例之间相同相似部分可以互相参见。对于实施例公开的方法、产品等而言,如果其与实施例公开的方法部分相对应,那么相关之处可以参见方法部分的描述。The above description and drawings sufficiently illustrate the embodiments of the present disclosure to enable those skilled in the art to practice them. Other embodiments may incorporate structural, logical, electrical, procedural, and other changes. The examples merely represent possible variations. Unless explicitly required otherwise, individual components and functions are in one embodiment of the present application, and the order of operations may vary. Portions and sub-samples of some embodiments may be included in or replace portions and sub-samples of other embodiments. Also, the terms used in the present application are used to describe the embodiments only and are not used to limit the claims. As used in the examples and description of the claims, the singular forms "a", "an" and "the" are intended to include the plural forms as well unless the context clearly dictates otherwise. Similarly, the term "and/or" as used in this application is meant to include any and all possible combinations of one or more of the associated listed ones. Additionally, when used in this application, the term "comprise" and its variants "comprises" and/or comprising (comprising) etc. refer to stated sub-samples, integers, steps, operations, elements, and/or or component, but does not preclude the presence or addition of one or more other sub-samples, integers, steps, operations, elements, components and/or groupings of these. Without further limitations, an element qualified by the statement "comprising a ..." does not preclude the presence of additional identical elements in the process, method or apparatus comprising the element. Herein, what each embodiment focuses on may be the difference from other embodiments, and the same and similar parts of the various embodiments may refer to each other. For the method, product, etc. disclosed in the embodiment, if it corresponds to the method part disclosed in the embodiment, then the relevant part can refer to the description of the method part.
本领域技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,可以取决于技术方案的特定应用和设计约束条件。技术人员可以对每个特定的应用来使用不同方法以实现所描述的功能,但是这种实现不应认为超出本公开实施例的范围。技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。Those skilled in the art can appreciate that the units and algorithm steps of the examples described in conjunction with the embodiments disclosed herein can be implemented by electronic hardware, or a combination of computer software and electronic hardware. Whether these functions are performed by hardware or software may depend on the specific application and design constraints of the technical solution. Skilled artisans may implement the described functions using different methods for each specific application, but such implementation should not be considered as exceeding the scope of the disclosed embodiments. Those skilled in the art can clearly understand that, for the convenience and brevity of description, the specific working process of the above-described system, device and unit can refer to the corresponding process in the foregoing method embodiment, which will not be repeated here.
本文所披露的实施例中,所揭露的方法、产品(包括但不限于装置、设备等),可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,单元的划分,可以仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些子样本可以忽略,或不执行。另外,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例。另外,在本公开实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。In the embodiments disclosed herein, the disclosed methods and products (including but not limited to devices, equipment, etc.) can be implemented in other ways. For example, the device embodiments described above are only illustrative. For example, the division of units may only be a logical function division. In actual implementation, there may be other division methods. For example, multiple units or components may be combined or may be Integration into another system, or some sub-samples may be ignored, or not implemented. In addition, the mutual coupling or direct coupling or communication connection shown or discussed may be through some interfaces, and the indirect coupling or communication connection of devices or units may be in electrical, mechanical or other forms. A unit described as a separate component may or may not be physically separated, and a component displayed as a unit may or may not be a physical unit, that is, it may be located in one place, or may be distributed to multiple network units. Some or all of the units can be selected according to actual needs to implement this embodiment. In addition, each functional unit in the embodiments of the present disclosure may be integrated into one processing unit, each unit may exist separately physically, or two or more units may be integrated into one unit.
附图中的流程图和框图显示了根据本公开实施例的系统、方法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,流程图或框图中的每个方框可以代表一个模块、程序段或代码的一部分,所述模块、程序段或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。在有些作为替换的实现中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。例如,两个连续的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这可以依所涉及的功能而定。在附图中的流程图和框图所对应的描述中,不同的方框所对应的操作或步骤也可以以不同于描述中所披露的顺序发生,有时不同的操作或步骤之间不存在特定的顺序。例如,两个连续的操作或步骤实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这可以依所涉及的功能而定。框图和/或流程图中的每个方框、以及框图和/或流程图中的方框的组合,可以用执行规定的功能或动作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。The flowchart and block diagrams in the figures illustrate the architecture, functionality, and operation of possible implementations of systems, methods and computer program products according to embodiments of the disclosure. In this regard, each block in a flowchart or block diagram may represent a module, program segment, or part of code that includes one or more Executable instructions. In some alternative implementations, the functions noted in the block may occur out of the order noted in the figures. For example, two blocks in succession may, in fact, be executed substantially concurrently, or they may sometimes be executed in the reverse order, depending upon the functionality involved. In the descriptions corresponding to the flowcharts and block diagrams in the accompanying drawings, the operations or steps corresponding to different blocks may also occur in a different order than that disclosed in the description, and sometimes there is no specific agreement between different operations or steps. order. For example, two consecutive operations or steps may, in fact, be performed substantially concurrently, or they may sometimes be performed in the reverse order, depending upon the functionality involved. Each block in the block diagrams and/or flowcharts, and combinations of blocks in the block diagrams and/or flowcharts, can be implemented by a dedicated hardware-based system that performs the specified function or action, or can be implemented by dedicated hardware implemented in combination with computer instructions.
Claims (14)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211684851.3ACN116071714A (en) | 2022-12-27 | 2022-12-27 | Lane departure detection method, system, electronic device and readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211684851.3ACN116071714A (en) | 2022-12-27 | 2022-12-27 | Lane departure detection method, system, electronic device and readable storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN116071714Atrue CN116071714A (en) | 2023-05-05 |
Family
ID=86174141
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211684851.3APendingCN116071714A (en) | 2022-12-27 | 2022-12-27 | Lane departure detection method, system, electronic device and readable storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116071714A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117268425A (en)* | 2023-11-23 | 2023-12-22 | 南通诺信汽车零部件有限公司 | Accurate navigation method and system of vehicle, medium, computing equipment and vehicle |
| CN118570772A (en)* | 2024-08-02 | 2024-08-30 | 福思(杭州)智能科技有限公司 | Method, device, storage medium and electronic device for determining vehicle bumpy working conditions |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104835324A (en)* | 2015-05-22 | 2015-08-12 | 吉林大学 | Road deviation monitoring method and system |
| CN108052908A (en)* | 2017-12-15 | 2018-05-18 | 郑州日产汽车有限公司 | Track keeping method |
| CN110733416A (en)* | 2019-09-16 | 2020-01-31 | 江苏大学 | lane departure early warning method based on inverse perspective transformation |
| CN110745135A (en)* | 2018-07-06 | 2020-02-04 | 现代摩比斯株式会社 | Apparatus and method for compensating heading angle |
| CN111002990A (en)* | 2019-12-05 | 2020-04-14 | 华南理工大学 | A lane departure warning method and system based on dynamic departure threshold |
| CN112572433A (en)* | 2020-12-24 | 2021-03-30 | 奇瑞汽车股份有限公司 | Lane keeping control method, lane keeping control device and computer storage medium |
| CN113034976A (en)* | 2021-03-23 | 2021-06-25 | 地平线(上海)人工智能技术有限公司 | Alarm method and device, computer readable storage medium and electronic equipment |
| CN113065391A (en)* | 2021-02-20 | 2021-07-02 | 北京理工大学 | A vanishing point detection method for unstructured roads in complex scenes |
| CN113515973A (en)* | 2020-04-09 | 2021-10-19 | 北京地平线机器人技术研发有限公司 | Data acquisition method, training method, adjustment method and device |
- 2022
- 2022-12-27CNCN202211684851.3Apatent/CN116071714A/enactivePending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104835324A (en)* | 2015-05-22 | 2015-08-12 | 吉林大学 | Road deviation monitoring method and system |
| CN108052908A (en)* | 2017-12-15 | 2018-05-18 | 郑州日产汽车有限公司 | Track keeping method |
| CN110745135A (en)* | 2018-07-06 | 2020-02-04 | 现代摩比斯株式会社 | Apparatus and method for compensating heading angle |
| CN110733416A (en)* | 2019-09-16 | 2020-01-31 | 江苏大学 | lane departure early warning method based on inverse perspective transformation |
| CN111002990A (en)* | 2019-12-05 | 2020-04-14 | 华南理工大学 | A lane departure warning method and system based on dynamic departure threshold |
| CN113515973A (en)* | 2020-04-09 | 2021-10-19 | 北京地平线机器人技术研发有限公司 | Data acquisition method, training method, adjustment method and device |
| CN112572433A (en)* | 2020-12-24 | 2021-03-30 | 奇瑞汽车股份有限公司 | Lane keeping control method, lane keeping control device and computer storage medium |
| CN113065391A (en)* | 2021-02-20 | 2021-07-02 | 北京理工大学 | A vanishing point detection method for unstructured roads in complex scenes |
| CN113034976A (en)* | 2021-03-23 | 2021-06-25 | 地平线(上海)人工智能技术有限公司 | Alarm method and device, computer readable storage medium and electronic equipment |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117268425A (en)* | 2023-11-23 | 2023-12-22 | 南通诺信汽车零部件有限公司 | Accurate navigation method and system of vehicle, medium, computing equipment and vehicle |
| CN117268425B (en)* | 2023-11-23 | 2024-04-12 | 南通诺信汽车零部件有限公司 | Accurate navigation method and system of vehicle, medium, computing equipment and vehicle |
| CN118570772A (en)* | 2024-08-02 | 2024-08-30 | 福思(杭州)智能科技有限公司 | Method, device, storage medium and electronic device for determining vehicle bumpy working conditions |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111060094B (en) | Vehicle positioning method and device | |
| US10572717B1 (en) | System and method for evaluating the perception system of an autonomous vehicle | |
| EP3888985B1 (en) | Lane changing method and system for autonomous vehicles, and vehicle | |
| EP3929046A1 (en) | Vertical parking method | |
| US10703360B2 (en) | Parking support method and device | |
| KR102558055B1 (en) | Suboptimal estimation method | |
| US9880554B2 (en) | Misrecognition determination device | |
| JP6747269B2 (en) | Object recognition device | |
| CN112507862B (en) | Vehicle orientation detection method and system based on multitasking convolutional neural network | |
| JPWO2019098353A1 (en) | Vehicle position estimation device and vehicle control device | |
| KR20090088210A (en) | Target parking position detection method and device using two reference points and parking assistance system using the same | |
| CN116071714A (en) | Lane departure detection method, system, electronic device and readable storage medium | |
| US20200166349A1 (en) | Parking support apparatus | |
| KR102056147B1 (en) | Registration method of distance data and 3D scan data for autonomous vehicle and method thereof | |
| CN106295560A (en) | The track keeping method controlled based on vehicle-mounted binocular camera and stagewise PID | |
| JP2018048949A (en) | Object identification device | |
| CN116279459A (en) | Lane keeping method, system and electronic equipment | |
| US20250258001A1 (en) | Navigation method and corresponding apparatus | |
| CN114972427A (en) | A target tracking method based on monocular vision, terminal device and storage medium | |
| WO2024139319A1 (en) | Narrow-road passing method and apparatus, vehicle and storage medium | |
| US20220205789A1 (en) | Vehicle control system and own vehicle position estimating method | |
| US11380120B2 (en) | Driving assistance device | |
| JP2019148889A (en) | Road boundary detection device | |
| CN118269954A (en) | Automatic parking method, automatic parking device, vehicle and computer readable storage medium | |
| KR20240062439A (en) | Method of detecting lane and electronic apparatus performing thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |