CN115998568A - Knee joint replacement operation support based on voice control - Google Patents
Knee joint replacement operation support based on voice controlDownload PDFInfo
- Publication number
- CN115998568A CN115998568ACN202211737131.9ACN202211737131ACN115998568ACN 115998568 ACN115998568 ACN 115998568ACN 202211737131 ACN202211737131 ACN 202211737131ACN 115998568 ACN115998568 ACN 115998568A
- Authority
- CN
- China
- Prior art keywords
- voice
- angle
- knee joint
- voice control
- adjustment mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Orthopedics, Nursing, And Contraception (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于医疗器材领域,具体涉及一种基于语音控制的膝关节置换手术支架。The invention belongs to the field of medical equipment, and in particular relates to a knee joint replacement operation bracket based on voice control.
背景技术Background technique
膝关节是下肢重要的负重关节,其结构和功能是人体关节中最复杂者。膝关节退行性骨关节病是老年人的常见疾病,据报道50岁以上存在症状的膝关节骨关节病男性发病率35%,女性高达74%。严重膝关节骨关节病需要进行人工膝关节置换术的患者越来越多。膝关节置换术可解除膝关节疼痛,改善膝关节功能,纠正膝关节畸形和获得长期稳定。The knee joint is an important load-bearing joint of the lower limbs, and its structure and function are the most complex among human joints. Knee degenerative osteoarthropathy is a common disease of the elderly. According to reports, the incidence of knee osteoarthritis in men over 50 years old is 35%, and that of women is as high as 74%. The number of patients with severe knee osteoarthritis requiring artificial knee arthroplasty is increasing. Knee replacement surgery can relieve knee pain, improve knee function, correct knee deformity and achieve long-term stability.
为了方便膝关节手术的进行,目前出现了很多膝关节置换手术支架,用于术中对腿部进行支撑,以及调节膝盖的弯曲角度等。虽然有了手术支架的辅助,但是手术中还是需要较多的医务工作者参加,用以随时配合手术对支架的角度进行调节等,一般进行人工膝关节置换手术最少还是需要4名医务工作者参加,占用了过多的医疗资源。而且操作过程中其他辅助医务工作者需要根据医生的指令对手术支架进行调节,节奏比较慢,延长了手术时间,对医务工作者的要求也比较高,而且手工调节误差比较大,或者需要反复调节才能达到要求。In order to facilitate the operation of the knee joint, many knee replacement surgery brackets have appeared at present, which are used to support the leg during the operation and adjust the bending angle of the knee. Although with the aid of surgical brackets, more medical workers are still required to participate in the operation to adjust the angle of the brackets in conjunction with the operation at any time. Generally, at least 4 medical workers are required to participate in artificial knee replacement surgery. Take up too many medical resources. Moreover, during the operation, other auxiliary medical workers need to adjust the surgical bracket according to the doctor's instructions. The rhythm is relatively slow, prolonging the operation time, and the requirements for medical workers are relatively high, and the manual adjustment error is relatively large, or repeated adjustments are required. to meet the requirements.
发明内容Contents of the invention
针对上述问题,本发明旨在提供一种基于语音控制的膝关节置换手术支架,直接通过语音指令即可控制支架自动进行调节,调节精确度高,同时能节约医疗资源。In view of the above problems, the present invention aims to provide a knee joint replacement surgical support based on voice control, which can control the automatic adjustment of the support directly through voice commands, with high adjustment accuracy, and can save medical resources at the same time.
为了实现上述目的,本发明采用如下技术方案:一种基于语音控制的膝关节置换手术支架,包括第一角度调节机构和语音控制单元;其中,In order to achieve the above object, the present invention adopts the following technical solution: a knee joint replacement surgery bracket based on voice control, including a first angle adjustment mechanism and a voice control unit; wherein,
所述第一角度调节机构,用于调节膝关节弯曲的角度;The first angle adjustment mechanism is used to adjust the bending angle of the knee joint;
所述语音控制单元,用于接收语音信息,并根据所述语音信息控制所述第一角度调节机构进行角度调节。The voice control unit is used to receive voice information, and control the first angle adjustment mechanism to adjust the angle according to the voice information.
进一步地,还包括第二角度调节机构;其中,Further, it also includes a second angle adjustment mechanism; wherein,
所述第二角度调节机构,用于调节腿部外展的角度;The second angle adjustment mechanism is used to adjust the angle of leg abduction;
所述语音控制单元,还用于根据所述语音信息控制所述第二角度调节机构进行角度调节。The voice control unit is further configured to control the second angle adjustment mechanism to adjust the angle according to the voice information.
进一步地,所述语音控制单元包括微控制器、拾音模块、第一角度传感器和第二角度传感器,其中,Further, the voice control unit includes a microcontroller, a pickup module, a first angle sensor and a second angle sensor, wherein,
所述拾音模块,用于拾取语音信息,并将语音信息传输给微控制器;The sound pickup module is used to pick up voice information and transmit the voice information to the microcontroller;
所述第一角度传感器,用于测量膝关节弯曲的第一角度信息,并将所述第一角度信息传输给微控制器;The first angle sensor is used to measure the first angle information of knee joint bending, and transmit the first angle information to the microcontroller;
所述第二角度传感器,用于测量腿部外展的第二角度信息,并将所述第二角度信息传输给微控制器;The second angle sensor is used to measure the second angle information of leg abduction, and transmit the second angle information to the microcontroller;
所述微控制器,用于根据接收到的所述语音信号、所述第一角度信息和/或所述第二角度信息,产生控制信号,控制所述第一角度调节机构和/或所述第二角度调节机构进行角度调节。The microcontroller is configured to generate a control signal according to the received voice signal, the first angle information and/or the second angle information to control the first angle adjustment mechanism and/or the The second angle adjustment mechanism performs angle adjustment.
进一步地,所述语音控制单元还包括语音识别模块,所述语音识别模块用于将拾取到的语音信息识别成文字信息,并传输给微控制器。Further, the voice control unit further includes a voice recognition module, which is used to recognize the picked up voice information into text information and transmit it to the microcontroller.
进一步地,所述语音控制单元还包括通信模块,所述通信模块用于将语音信息发送至云端服务器,接收云端服务器识别完成的文字信息,并传输给微控制器。Further, the voice control unit further includes a communication module, which is used to send the voice information to the cloud server, receive the text information recognized by the cloud server, and transmit it to the microcontroller.
进一步地,所述语音控制单元还包括语音唤醒模块,当语音唤醒模块接收到的语音信息与预设语音信息匹配成功时,所述微控制器被唤醒。Further, the voice control unit further includes a voice wake-up module, and when the voice information received by the voice wake-up module matches the preset voice information successfully, the microcontroller is woken up.
进一步地,所述第一角度调节机构包括固定底座、第一摇臂和第一电动推杆;所述第一摇臂的一端与所述固定底座铰接,所述第一电动推杆的底座与所述固定底座铰接,所述第一电动推杆的伸缩端与所述第一摇臂的另一端铰接;所述第一电动推杆与所述微控制器连接。Further, the first angle adjustment mechanism includes a fixed base, a first rocker arm and a first electric push rod; one end of the first rocker arm is hinged to the fixed base, and the base of the first electric push rod is connected to the The fixed base is hinged, the telescopic end of the first electric push rod is hinged with the other end of the first rocker arm; the first electric push rod is connected with the microcontroller.
进一步地,所述第一角度调节机构包括第一滑块、第二滑块、滑轨、第一摇臂、第二摇臂和第一电动推杆;所述第一滑块和所述第二滑块分别与所述滑轨滑动连接,所述第一摇臂的一端和所述第一滑块铰接,所述第二摇臂的一端和所述第二滑块铰接,所述第一摇臂的另一端和所述第二摇臂的另一端铰接,所述第一电动推杆的底座与第一滑块铰接,所述第一电动推杆的伸缩端与所述第二滑块铰接铰接。Further, the first angle adjustment mechanism includes a first slider, a second slider, a slide rail, a first rocker, a second rocker and a first electric push rod; the first slider and the second The two sliders are respectively slidingly connected to the slide rails, one end of the first rocker arm is hinged to the first slider, one end of the second rocker arm is hinged to the second slider, and the first rocker arm is hinged to the second slider. The other end of the rocker arm is hinged to the other end of the second rocker arm, the base of the first electric push rod is hinged to the first slider, and the telescopic end of the first electric push rod is hinged to the second slider. Hinged Hinged.
进一步地,所述第二角度调节机构包括固定杆、摆臂、摆杆、腿部支撑板和锁紧电机,所述固定杆的一端固定在所述第一摇臂的一端,所述所述固定杆的另一端与所述摆臂的一端铰接,所述摆杆的一端与所述摆臂的另一端铰接,所述摆杆的另一端与所述第一摇臂的另一端滑动连接,所述锁紧电机设置在所述第一摆臂上,当所述锁紧电机锁紧时,限制所述摆杆相对于所述第一摇臂滑动;所述摆臂的一侧设置有腿部支撑板。Further, the second angle adjustment mechanism includes a fixed rod, a swing arm, a swing rod, a leg support plate and a locking motor, one end of the fixed rod is fixed on one end of the first rocker arm, and the The other end of the fixed rod is hinged to one end of the swing arm, one end of the swing rod is hinged to the other end of the swing arm, and the other end of the swing rod is slidably connected to the other end of the first rocker arm, The locking motor is arranged on the first swing arm, and when the locking motor is locked, the swing bar is restricted from sliding relative to the first swing arm; one side of the swing arm is provided with a leg support plate.
进一步地,所述第二角度调节机构包括固定杆、摆臂、腿部支撑板和第二电动推杆;所述固定杆的一端固定在所述第一摇臂的一端,所述固定杆的另一端与所述摆臂的一端铰接,所述第二电动推杆的底座固定在所述第一摇臂的侧部,所述第二电动推杆的伸缩端与所述摆臂的另一端铰接。Further, the second angle adjustment mechanism includes a fixed rod, a swing arm, a leg support plate, and a second electric push rod; one end of the fixed rod is fixed to one end of the first rocker arm, and one end of the fixed rod The other end is hinged to one end of the swing arm, the base of the second electric push rod is fixed on the side of the first rocker arm, the telescopic end of the second electric push rod is connected to the other end of the swing arm hinged.
本发明通过在膝关节置换手术支架中设置语音控制单元,在术中,直接通过语音指令即可控制支架自动进行调节,使膝关节达到合适的弯曲角度,并且自动调节稳定性好,精确度高,缩短了手术时间,同时能将医务工作者减少至2-3人即可完成手术,节约了医疗资源。In the present invention, a voice control unit is provided in the bracket for knee joint replacement surgery. During the operation, the bracket can be controlled to automatically adjust directly through voice commands, so that the knee joint can reach a suitable bending angle, and the automatic adjustment has good stability and high precision. , shorten the operation time, and reduce the number of medical workers to 2-3 to complete the operation, saving medical resources.
附图说明Description of drawings
图1为本发明的手术支架的一种模块结构示意图;Fig. 1 is a kind of modular structure schematic diagram of surgical support of the present invention;
图2为本发明的手术支架的另一种模块结构示意图;Fig. 2 is another kind of modular structure schematic diagram of surgical support of the present invention;
图3为包含细化的语音控制单元的模块结构示意图;Fig. 3 is a schematic diagram of a module structure comprising a refined voice control unit;
图4为实现语音识别功能的一种模块结构示意图;Fig. 4 is a kind of module structure schematic diagram that realizes speech recognition function;
图5为实现语音识别功能的另一种模块结构示意图;Fig. 5 is another kind of module structure schematic diagram that realizes speech recognition function;
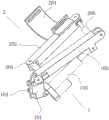
图6为本发明的手术支架的一种结构示意图;Fig. 6 is a kind of structural representation of surgical support of the present invention;
图7为本发明的手术支架的另一种结构示意图;Fig. 7 is another kind of structural representation of surgical support of the present invention;
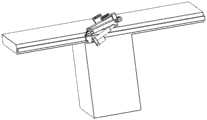
图8为本发明的一种手术支架的安装结构示意图;Fig. 8 is a schematic diagram of the installation structure of a surgical support of the present invention;
图9为本发明的手术支架的另一种结构示意图;Fig. 9 is another schematic structural view of the surgical stent of the present invention;
图10为本发明的手术支架的另一种结构示意图;Fig. 10 is another schematic structural view of the surgical stent of the present invention;
图11为本发明的另一种手术支架的安装结构示意图;Fig. 11 is a schematic diagram of the installation structure of another surgical support of the present invention;
上述图中:1-第一角度调节机构;101-固定底座;102-第一摇臂;103-第一电动推杆;104-固定卡扣;105-第一滑块;106-第二滑块;107-滑轨;108-第二摇臂;109-第一固定底座;1010-第二固定底座;2-第二角度调节机构;201-固定杆;202-摆臂;203-摆杆;204-腿部支撑板;205-锁紧电机;206-第二电动推杆。In the above figure: 1-first angle adjustment mechanism; 101-fixed base; 102-first rocker arm; 103-first electric push rod; 104-fixed buckle; 105-first slider; 106-second slider 107-slide rail; 108-the second rocker arm; 109-the first fixed base; 1010-the second fixed base; 2-the second angle adjustment mechanism; 201-fixed rod; 202-swing arm; 203-swing rod ; 204-leg support plate; 205-locking motor; 206-the second electric push rod.
具体实施方式Detailed ways
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
为了方便膝关节手术的进行,目前出现了很多膝关节置换手术支架,用于术中对腿部进行支撑,以及调节膝盖的弯曲角度等。虽然有了手术支架的辅助,但是手术中还是需要较多的医务工作者参加,用以随时配合手术对支架的角度进行调节等。一般进行人工膝关节置换手术最少还是需要4名医务工作者参加,占用了过多的医疗资源,而且操作过程中其他辅助医务工作者需要根据医生的指令对手术支架进行调节,节奏比较慢,延长了手术时间;同时对医务工作者的要求也比较高;手工调节误差比较大,或者需要反复调节才能达到要求。In order to facilitate the operation of the knee joint, many knee replacement surgery brackets have appeared at present, which are used to support the leg during the operation and adjust the bending angle of the knee. Although there is the assistance of the surgical stent, more medical workers are required to participate in the operation to adjust the angle of the stent in conjunction with the operation at any time. Generally, at least 4 medical workers are required to participate in artificial knee replacement surgery, which takes up too much medical resources, and other auxiliary medical workers need to adjust the surgical bracket according to the doctor's instructions during the operation, which is slow and prolongs the operation time. Operating time; at the same time, the requirements for medical workers are relatively high; manual adjustment errors are relatively large, or repeated adjustments are required to meet the requirements.
为了解决上述问题,本发明提供一种基于语音控制的膝关节置换手术支架,如图1所示,本发明的手术支架包括第一角度调节机构1和语音控制单元;In order to solve the above problems, the present invention provides a knee joint replacement surgery support based on voice control, as shown in Figure 1, the surgery support of the present invention includes a first
其中,第一角度调节机构1,用于调节膝关节弯曲的角度;Wherein, the first
语音控制单元,用于接收语音信息,并根据语音信息控制第一角度调节机构1进行角度调节。The voice control unit is used to receive voice information, and control the first
在现有技术的膝关节置换手术支架中,除了用手直接去调节的支架,剩下的一大部分都配有电动调节装置,这类电动调节的支架可加装语音控制单元,通过语音指令控制电动调节装置,进而利用语音控制支架的角度调节。Among the knee joint replacement surgery brackets in the prior art, except for the brackets that are directly adjusted by hand, most of the remaining brackets are equipped with electric adjustment devices. This type of electrically adjustable brackets can be equipped with a voice control unit. Control the electric adjustment device, and then use the voice to control the angle adjustment of the bracket.
本发明通过在膝关节置换手术支架中设置语音控制单元,在术中,直接通过语音指令即可控制支架自动进行调节,使膝关节达到合适的弯曲角度,并且自动调节稳定性好,精确度高,缩短了手术时间,同时能将医务工作者减少至2人即可完成手术,节约了医疗资源。In the present invention, a voice control unit is provided in the bracket for knee joint replacement surgery. During the operation, the bracket can be controlled to automatically adjust directly through voice commands, so that the knee joint can reach a suitable bending angle, and the automatic adjustment has good stability and high precision. , Shorten the operation time, and at the same time reduce the number of medical workers to 2 to complete the operation, saving medical resources.
一般在膝关节置换手术中,患者躺在手术床上,医生位于患者外侧,但是术中有部分操作是需要在患者膝关节内侧完成的,因此术中仅调节膝关节弯曲的角度还是有诸多不便,为此,本实施例中还包括第二角度调节机构2,用于调节腿部外展的角度;语音控制单元,还用于根据语音信息控制第二角度调节机构2进行角度调节。Generally, in knee replacement surgery, the patient is lying on the operating table, and the doctor is located on the outside of the patient. However, some operations need to be performed on the inside of the patient's knee joint during the operation. Therefore, it is still inconvenient to only adjust the bending angle of the knee joint during the operation. For this reason, this embodiment also includes a second
如图2所示,本实施例中共设置有两个角度调节机构,即用于调节膝关节弯曲角度的第一角度调节机构1,以及用于调节腿部外展角度的第二角度调节机构2,两个角度调节机构都通过语音控制单元进行控制,继而实现语音控制角度调节。As shown in Figure 2, there are two angle adjustment mechanisms in this embodiment, namely the first
在一个具体的实施例中,提供有一种语音控制单元的模块结构,如图3所示,包括微控制器、拾音模块、第一角度传感器和第二角度传感器,其中,In a specific embodiment, a module structure of a voice control unit is provided, as shown in Figure 3, including a microcontroller, a pickup module, a first angle sensor and a second angle sensor, wherein,
拾音模块,用于拾取语音信息,并将语音信息传输给微控制器;A pickup module, used to pick up voice information, and transmit the voice information to the microcontroller;
第一角度传感器,用于测量膝关节弯曲的第一角度信息,并将第一角度信息传输给微控制器;其中,膝关节的弯曲角度是指人体平躺时,腿部弯曲时,其大腿和小腿之间的角度,第一角度传感器用于测量该角度。The first angle sensor is used to measure the first angle information of the bending of the knee joint, and transmit the first angle information to the microcontroller; wherein, the bending angle of the knee joint refers to when the human body is lying flat, when the leg is bent, the thigh and the angle between the calf, the first angle sensor is used to measure the angle.
第二角度传感器,用于测量腿部外展的第二角度信息,并将第二角度信息传输给微控制器;其中腿部外展的角度是指,人体平躺时,两腿自然伸直,此时认为腿部居中,外展的角度为0度,当腿部向两侧打开,腿部打开的位置与腿部居中位置之间的角度为腿部外展的角度,第二角度传感器用于测量该角度。The second angle sensor is used to measure the second angle information of leg abduction, and transmit the second angle information to the microcontroller; wherein the angle of leg abduction refers to that when the human body is lying flat, the legs are naturally straightened , at this time, the legs are considered to be in the center, and the angle of abduction is 0 degrees. When the legs are opened to both sides, the angle between the open position of the legs and the center position of the legs is the angle of abduction of the legs. The second angle sensor used to measure the angle.
微控制器,用于根据接收到的语音信号、第一角度信息和/或第二角度信息,产生控制信号,控制第一角度调节机构1和/或第二角度调节机构2进行角度调节。The microcontroller is used to generate a control signal according to the received voice signal, the first angle information and/or the second angle information, and control the first
在上述实施例中,提供了一种语音控制单元的具体结构,用于实现语音控制的功能。在调节过程中,第一角度传感器和第二角度传感器分别用于测量调节之前膝关节的弯曲角度和腿部外展的角度,拾音模块用于接收语音指令,微控制器则结合语音指令以及第一角度传感器和/或第二角度传感器测量的角度信息生成控制信号,控制第一角度调节机构1和/或第二角度调节机构2进行角度调节,进而实现了语音控制支架自动进行调节的功能。In the above embodiments, a specific structure of the voice control unit is provided for implementing voice control functions. During the adjustment process, the first angle sensor and the second angle sensor are respectively used to measure the bending angle of the knee joint and the angle of leg abduction before adjustment, the sound pickup module is used to receive voice commands, and the microcontroller combines voice commands and The angle information measured by the first angle sensor and/or the second angle sensor generates a control signal, controls the first
拾音模块拾取语音信息后,需要转换成文字信息,微控制器才能识别,为了将语音信息转换成文字信息,图4提供了一种实现语音识别功能的模块结构,语音控制单元中还设置有语音识别模块,用于将拾取到的语音信息识别成文字信息,并传输给微控制器。微控制器接收到识别后的文字信息,根据文字信息生产控制信号,控制第一角度调节机构1和/或第二角度调节机构2进行角度调节。After the voice information is picked up by the sound pickup module, it needs to be converted into text information, and the microcontroller can recognize it. In order to convert the voice information into text information, Figure 4 provides a module structure for realizing the voice recognition function. The voice control unit is also provided with The voice recognition module is used to recognize the picked up voice information into text information and transmit it to the microcontroller. The microcontroller receives the recognized text information, generates a control signal according to the text information, and controls the first
目前语音识别的应用较为广泛,许多商家也提供了语音识别的线上服务,因此,为了实现语音识别,还可以利用线上的语音识别服务器,拾音模块拾取到语音信息后,将语音信息上传至语音识别服务器,语音识别服务器识别语音后转换成文字信息回传至微控制器,微控制器即可识别。因此为了实现上述语音识别功能,图5提供了另外一种模块结构,语音控制单元包括通信模块,通信模块用于将语音信息发送至云端服务器,接收云端服务器识别完成的文字信息,并传输给微控制器,其中通信模块可为有线或无线通信模块。At present, speech recognition is widely used, and many merchants also provide online services for speech recognition. Therefore, in order to realize speech recognition, an online speech recognition server can also be used to upload the speech information after the pickup module picks up the speech information. To the speech recognition server, after the speech recognition server recognizes the speech, it converts it into text information and sends it back to the microcontroller, and the microcontroller can recognize it. Therefore, in order to realize the above speech recognition function, Fig. 5 provides another module structure, the speech control unit includes a communication module, the communication module is used to send the speech information to the cloud server, receive the text information that the cloud server has recognized, and transmit it to the micro The controller, wherein the communication module can be a wired or wireless communication module.
在上述实施例中提供了两种用于实现语音识别功能模块的具体结构,可在实际应用中,根据需要具体选择。In the above embodiments, two specific structures for implementing the speech recognition function module are provided, which can be selected according to actual needs in practical applications.
为了节能,语音控制单元还包括语音唤醒模块,当语音唤醒模块接收到的语音信息与预设语音信息匹配成功时,微控制器被唤醒。也就是平时不工作时,语音控制单元中除了语音唤醒模块,其余模块均睡眠模式,此时功耗极低,只有当语音唤醒模块接收到的语音信息与预设语音信息匹配成功时,微控制器才被唤醒,继而唤醒其余各模块,开启语音控制功能。例如,可设置预设语音信息为“小支架”,当语音唤醒模块接收到语音信息“小支架”时,语音唤醒模块唤醒微控制器。此时语音唤醒模块中还可以配置扬声器模块,当微控制器被唤醒后,可通过扬声器回复“我在”,用以提示医生目前语音控制单元均已被唤醒,可进行调节操作了。In order to save energy, the voice control unit also includes a voice wake-up module. When the voice information received by the voice wake-up module matches the preset voice information successfully, the microcontroller is woken up. That is, when not working normally, except for the voice wake-up module, other modules in the voice control unit are in sleep mode. At this time, the power consumption is extremely low. Only when the voice information received by the voice wake-up module matches the preset voice information successfully, the microcontroller The device is woken up, and then wakes up the other modules, and turns on the voice control function. For example, the preset voice information can be set as "small bracket", and when the voice wake-up module receives the voice information "small bracket", the voice wake-up module wakes up the microcontroller. At this time, a speaker module can also be configured in the voice wake-up module. When the microcontroller is woken up, it can reply "I am" through the speaker to remind the doctor that the voice control unit has been woken up and can be adjusted.
在一个具体的实施例中提供一种第一角度调节机构1的具体结构,如图6或7所示,第一角度调节机构1包括固定底座101、第一摇臂102和第一电动推杆103;第一摇臂102的一端与固定底座101铰接,第一电动推杆103的底座与固定底座101铰接,第一电动推杆103的伸缩端与第一摇臂102的另一端铰接,第一电动推杆103与微控制器连接。此外,固定底座101的侧部还设置有固定卡扣104,使用时,可通过固定卡扣104将手术支架固定在手术床的侧部。In a specific embodiment, a specific structure of the first
使用时,通过固定卡扣104将手术支架固定在手术床的侧边的合适位置,如图8所示,患者平躺在手术床上,第一摇臂102与患者的小腿平行,第一电动推杆103伸缩,带动与其铰接的第一摇臂102上下摆动,即带动大腿上下摆动,进而实现调节膝关节弯曲的角度。When in use, the surgical bracket is fixed at a suitable position on the side of the operating bed by the fixing
在另外一个具体的实施例中提供另外一种第一角度调节机构1的具体结构,如图9或10所示,第一角度调节机构1包括第一滑块105、第二滑块106、滑轨107、第一摇臂102、第二摇臂108和第一电动推杆103;第一滑块105和第二滑块106分别与滑轨107滑动连接,第一摇臂102的一端和第一滑块105铰接,第二摇臂108的一端和第二滑块106铰接,第一摇臂102的另一端和第二摇臂108的另一端铰接,第一电动推杆103的底座与第一滑块105铰接,第一电动推杆103的伸缩端与第二滑块106铰接铰接;第一电动推杆103与微控制器连接。In another specific embodiment, another specific structure of the first
在具体设置时,为了整体结构的稳定性,设置第一固定底座109和第二固定底座1010,第一滑块105固定在第一固定底座109的侧部,第二滑块106固定在第二固定底座1010的侧部,第一摇臂102的一端和第一固定底座109铰接,第二摇臂108的一端和第二固定底座1010铰接,第一摇臂102的另一端和第二摇臂108的另一端铰接,第一电动推杆103的底座与第一固定底座109铰接,第一电动推杆103的伸缩端与第二固定底座1010铰接。In the specific setting, for the stability of the overall structure, the first fixed
使用时,将滑轨107固定在手术床侧边的合适位置,如图9所示,患者平躺在手术床上,第一摇臂102与患者的小腿平行,第一电动推杆103伸缩,带动第一滑块105和第二滑块106沿滑轨107滑动,带动与其铰接的第一摇臂102和第二摇臂108之间的角度发生变化,从而带动大小腿之间的角度发生变化,进而实现调节膝关节弯曲的角度。When in use, the
上述的两个实施例中提供了两种第一角度调节机构1的具体结构,两种结构均是通过电动推杆的伸缩来实现膝关节弯曲角度的调节,医生根据需求输出语音信号后,微控制器识别语音信号后发出控制信号给第一电动推杆103,进而实现膝关节弯曲角度的调节。The above two embodiments provide two specific structures of the first
在一个具体的实施例中提供一种第二角度调节机构2的具体结构,如图6和9所示,第二角度调节机构2包括固定杆201、摆臂202、摆杆203、腿部支撑板204和锁紧电机205,固定杆201的一端固定在第一摇臂102的一端,固定杆201的另一端与摆臂202的一端铰接,摆杆203的一端与摆臂202的另一端铰接,摆杆203的另一端与第一摇臂102的另一端滑动连接,具体如图6所示,第一摇臂102上设置有滑孔,摆杆203的一端穿过滑孔,并能够沿滑孔滑动。锁紧电机205设置在第一摆臂102上,当锁紧电机锁紧时,限制摆杆203相对于第一摇臂滑动;具体设置时,可设置锁紧电机205的伸缩轴穿过滑孔的侧壁,令锁紧电机205的伸缩轴与摆杆203垂直,需要锁紧时,锁紧电机205的伸缩轴伸长,与摆杆203相抵,即可限制摆杆203相对于第一摇臂滑动。摆臂202的一侧设置有腿部支撑板204,使用时,将大腿根部置于该腿部支撑板204上。In a specific embodiment, a specific structure of the second
腿部外展角度的调节比较简单,调节角度较小,术中,只需医生用手轻轻拨动腿部即可实现调节,因此在调节过程中,只需要语音指令,控制锁紧电机205松开,调节完毕后,在通过语音指令,控制锁紧电机205锁紧即可,此时即可固定腿部在合适的外展角度。The adjustment of the leg abduction angle is relatively simple, and the adjustment angle is small. During the operation, the doctor only needs to gently move the leg with his hand to realize the adjustment. Therefore, during the adjustment process, only voice commands are needed to control the locking
当然,在另外的实施例中,还可以实现自动调节,本实施例提供另外一种第二角度调节机构2的具体结构,如图7和10所示,包括固定杆201、摆臂202、腿部支撑板204和第二电动推杆206;固定杆201的一端固定在第一摇臂102的一端,固定杆201的另一端与摆臂202的一端铰接,第二电动推杆206的底座固定在第一摇臂102的侧部,第二电动推杆206的伸缩端与摆臂202的另一端铰接。Of course, in other embodiments, automatic adjustment can also be realized. This embodiment provides another specific structure of the second
使用时,将患者的大腿根部置于腿部支撑板204上,医生通过语音指令,即可控制第二电动推杆206的伸缩,进而实现腿部外展角度的调节。When in use, the patient's thigh root is placed on the
上述通过4个具体的实施例,分别提供了两种第一角度调节机构1的具体结构以及两种第二角度调节机构2的具体结构,在使用时,可通过需求两两组合。Through the above four specific embodiments, two specific structures of the first
在上述两个关于第一角度调节机构1的具体结构的实施例中,并未设置腿部固定装置,如果因为上述两个装置中都包括两个对腿部进行调节的角度调节机构,如果在实施例中只设置第一角度调节机构1,将腿部支撑板204直接设置在第一摇臂102上即可。In the above two embodiments about the specific structure of the first
在一个具体的语音控制过程中,例如,当医生需要将患者的膝关节调节至45度时,医生发出语音信息“小支架”,此时语音唤醒模块接收到该语音信息后,与预设的语音信息进行比对,比对成功,唤醒微控制器,进而其他各模块被唤醒,同时,语音控制单元回复“我在”,用于提示医生目前处于可调节状态。医生可说出语音信息“将膝关节调节至45度”,拾音模块接收到该语音信息后,语音识别模块将该语音信息识别为文字信息后传输给微控制器,微控制器识别文字信息后,根据第一角度传感器采集到的当前膝关节弯曲的角度,生产调节指令,控制第一电动推杆103伸缩,带动第一摇臂102摆动,从而将膝关节的弯曲角度调节至45度。当第二角度调节结构配置的是第二电动推杆时控制过程同理。如果第二角度调节机构2配置的锁紧电机,锁紧电机通常是处于锁紧状态,需要调节时,只需要语音指令“松开”,此时可通过手拨动腿部外展的角度达到合适位置即可,此时说出语音指令“锁紧”,即可实现锁紧电机锁紧,完成调节。In a specific voice control process, for example, when the doctor needs to adjust the patient's knee joint to 45 degrees, the doctor sends out the voice message "small bracket". The voice information is compared, if the comparison is successful, the microcontroller is woken up, and then other modules are woken up. At the same time, the voice control unit replies "I am", which is used to remind the doctor that it is currently in an adjustable state. The doctor can say the voice message "adjust the knee joint to 45 degrees". After the voice pickup module receives the voice message, the voice recognition module recognizes the voice message as text information and transmits it to the microcontroller, and the microcontroller recognizes the text information Finally, according to the current bending angle of the knee joint collected by the first angle sensor, an adjustment command is produced to control the expansion and contraction of the first
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。It should be understood that those skilled in the art can make improvements or changes based on the above description, and all these improvements and changes should belong to the protection scope of the appended claims of the present invention.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211737131.9ACN115998568B (en) | 2022-12-30 | 2022-12-30 | A voice-controlled knee replacement surgery stent |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211737131.9ACN115998568B (en) | 2022-12-30 | 2022-12-30 | A voice-controlled knee replacement surgery stent |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115998568Atrue CN115998568A (en) | 2023-04-25 |
| CN115998568B CN115998568B (en) | 2025-09-26 |
Family
ID=86026439
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211737131.9AActiveCN115998568B (en) | 2022-12-30 | 2022-12-30 | A voice-controlled knee replacement surgery stent |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115998568B (en) |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002065770A (en)* | 2000-09-01 | 2002-03-05 | Hyogo Prefecture Social Welfare Corp | Kinematic function retraining training equipment |
| US20160151223A1 (en)* | 2014-11-27 | 2016-06-02 | AOD Holdings, LLC | Surgical Leg Positioner |
| WO2016117963A1 (en)* | 2015-01-23 | 2016-07-28 | 한인석 | Electric wheelchair having voice-recognition operating system |
| CN107157589A (en)* | 2017-05-22 | 2017-09-15 | 北京爱康宜诚医疗器材有限公司 | Soft tissue balance device for measuring force |
| CN108403378A (en)* | 2018-03-14 | 2018-08-17 | 重庆医科大学附属第二医院 | Knee surgery supporting adn fixing device |
| CN207837794U (en)* | 2017-03-08 | 2018-09-11 | 马少博 | A kind of hip replacement is lain on one's side clip pad |
| CN108922611A (en)* | 2018-06-29 | 2018-11-30 | 北京爱康宜诚医疗器材有限公司 | The control method and device of Medical Devices, Medical Devices |
| US20190192231A1 (en)* | 2017-12-22 | 2019-06-27 | Zimmer, Inc. | Robotically-assisted knee arthroplasty support systems and methods |
| CN111466950A (en)* | 2020-04-14 | 2020-07-31 | 青岛大学附属医院 | Multifunctional adjustable bracket for breast image examination and control system thereof |
| CN111631910A (en)* | 2020-06-05 | 2020-09-08 | 爱乔(上海)医疗科技有限公司 | Folding lower limb joint rehabilitation training device |
| WO2021008211A1 (en)* | 2019-07-12 | 2021-01-21 | 杭州市萧山区中医院 | Adjustable fixing apparatus assisting in artificial knee joint replacement |
| CN212817073U (en)* | 2020-06-05 | 2021-03-30 | 爱乔(上海)医疗科技有限公司 | Folding lower limb joint rehabilitation training device |
| CN113317965A (en)* | 2021-06-18 | 2021-08-31 | 中国人民解放军陆军军医大学第一附属医院 | Hip and knee bending angle adjusting device and method |
- 2022
- 2022-12-30CNCN202211737131.9Apatent/CN115998568B/enactiveActive
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002065770A (en)* | 2000-09-01 | 2002-03-05 | Hyogo Prefecture Social Welfare Corp | Kinematic function retraining training equipment |
| US20160151223A1 (en)* | 2014-11-27 | 2016-06-02 | AOD Holdings, LLC | Surgical Leg Positioner |
| WO2016117963A1 (en)* | 2015-01-23 | 2016-07-28 | 한인석 | Electric wheelchair having voice-recognition operating system |
| CN207837794U (en)* | 2017-03-08 | 2018-09-11 | 马少博 | A kind of hip replacement is lain on one's side clip pad |
| CN107157589A (en)* | 2017-05-22 | 2017-09-15 | 北京爱康宜诚医疗器材有限公司 | Soft tissue balance device for measuring force |
| US20190192231A1 (en)* | 2017-12-22 | 2019-06-27 | Zimmer, Inc. | Robotically-assisted knee arthroplasty support systems and methods |
| CN108403378A (en)* | 2018-03-14 | 2018-08-17 | 重庆医科大学附属第二医院 | Knee surgery supporting adn fixing device |
| CN108922611A (en)* | 2018-06-29 | 2018-11-30 | 北京爱康宜诚医疗器材有限公司 | The control method and device of Medical Devices, Medical Devices |
| WO2021008211A1 (en)* | 2019-07-12 | 2021-01-21 | 杭州市萧山区中医院 | Adjustable fixing apparatus assisting in artificial knee joint replacement |
| CN111466950A (en)* | 2020-04-14 | 2020-07-31 | 青岛大学附属医院 | Multifunctional adjustable bracket for breast image examination and control system thereof |
| CN111631910A (en)* | 2020-06-05 | 2020-09-08 | 爱乔(上海)医疗科技有限公司 | Folding lower limb joint rehabilitation training device |
| CN212817073U (en)* | 2020-06-05 | 2021-03-30 | 爱乔(上海)医疗科技有限公司 | Folding lower limb joint rehabilitation training device |
| CN113317965A (en)* | 2021-06-18 | 2021-08-31 | 中国人民解放军陆军军医大学第一附属医院 | Hip and knee bending angle adjusting device and method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115998568B (en) | 2025-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0380060A3 (en) | Electronic range of motion apparatus for orthosis, prothesis and cpm machine | |
| CN105411780A (en) | Adjustable medical leg support | |
| CN111904687B (en) | Orthopedics draw gear with contained angle is adjustable and self-locking function | |
| CN115998568A (en) | Knee joint replacement operation support based on voice control | |
| CN209645161U (en) | A kind of health-care orthopedic device for legs of child | |
| CN118873200A (en) | Intelligent tibial osteotomy orthopedic fixation device | |
| CN205234834U (en) | Adjustable medical shank support | |
| CN105596181A (en) | Hip joint brace system and control method thereof | |
| CN112603730B (en) | Knee joint replacement surgery is with bent knee auxiliary device | |
| CN205569143U (en) | Novel elbow joint is fixed device | |
| CN211326338U (en) | Nursing support after hip joint replacement | |
| CN211750847U (en) | Lower limb joint rehabilitation device | |
| CN114177006A (en) | Leg positioning mechanism for orthopedic doctor and use method thereof | |
| CN211213756U (en) | Elbow joint external fixation support | |
| CN209529406U (en) | Double self-locking artificial limb knee-joint structures | |
| CN214968456U (en) | A leg immobilizer | |
| CN2332373Y (en) | Femur ankle far end cutting positioner | |
| CN215821599U (en) | Walking booster used after orthopedic joint replacement operation | |
| CN223126801U (en) | Body position auxiliary holding tool | |
| CN217246266U (en) | Novel infrared polarized light therapeutic instrument | |
| CN219782876U (en) | Hip rehabilitation brace | |
| CN218853023U (en) | Spring type medical bed for assisting lower limb rehabilitation | |
| CN219646156U (en) | Orthopedics unicondylar replacement support | |
| CN112716729A (en) | Rehabilitation bed for orthopedic spine nursing | |
| CN215228955U (en) | Traction table for treating cervical vertebra and lumbar vertebra |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant |