CN115887014A - Apparatus clamping force control method, minimally invasive surgery robot and readable storage medium - Google Patents
Apparatus clamping force control method, minimally invasive surgery robot and readable storage mediumDownload PDFInfo
- Publication number
- CN115887014A CN115887014ACN202211257036.9ACN202211257036ACN115887014ACN 115887014 ACN115887014 ACN 115887014ACN 202211257036 ACN202211257036 ACN 202211257036ACN 115887014 ACN115887014 ACN 115887014A
- Authority
- CN
- China
- Prior art keywords
- instrument
- clamping force
- control method
- input signal
- clamp
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Manipulator (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及手术器械控制领域,具体涉及一种器械夹持力控制方法、微创手术机器人及可读存储介质。The invention relates to the field of surgical instrument control, in particular to an instrument clamping force control method, a minimally invasive surgical robot and a readable storage medium.
背景技术Background technique
微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。然而,微创手术中微创器械由于受到切口大小的限制,手术操作难度大为增加,且医生在长时间手术过程中的疲劳、颤抖等动作会被放大,这成为制约微创手术技术发展的关键因素。随着机器人技术的发展,一种可以克服缺点、继承优点的微创医疗领域新技术——微创手术机器人技术应运而生。Minimally invasive surgery refers to a surgical method that uses modern medical instruments such as laparoscopy and thoracoscopy and related equipment to perform surgery inside the human cavity. Compared with traditional surgical methods, minimally invasive surgery has the advantages of less trauma, less pain, and faster recovery. However, due to the limitation of incision size in minimally invasive surgery, minimally invasive instruments are greatly increased in operation difficulty, and the fatigue and trembling of doctors during long-term surgery will be amplified, which restricts the development of minimally invasive surgery technology. The key factor. With the development of robotic technology, a new technology in the field of minimally invasive medical care that can overcome its shortcomings and inherit its advantages - minimally invasive surgical robot technology has emerged as the times require.
常见的微创手术机器人由医生控制台、患者侧手推车和显示设备组成,外科医生在医生控制台操作输入装置,并将输入传给与远程操作的外科器械连接的患者侧手推车。医生控制台也称为主手,主手通常设有两个位于左右两侧的机械臂,用于满足操作输入装置的运动自由度要求。患者侧手推车也称为从手,从手通常具有多个持械臂和一个持镜臂,持械臂上安装有手术器械。手术器械用于对患者组织进行手术操作,其中最常见的操作之一就是夹持,而夹持力的控制至关重要,特别是在发生急停等特殊情况的时候。A common minimally invasive surgical robot consists of a doctor's console, a patient-side trolley, and a display device. The surgeon operates the input device on the doctor's console and transmits the input to the patient-side trolley connected to the remote-operated surgical instrument. The doctor's console is also called the main hand. The main hand usually has two mechanical arms located on the left and right sides to meet the freedom of movement requirements of the operation input device. The trolley on the patient side is also called the slave hand. The slave hand usually has a plurality of holding arms and a scope holding arm, and surgical instruments are installed on the holding arms. Surgical instruments are used to perform surgical operations on patient tissue. One of the most common operations is clamping, and the control of clamping force is crucial, especially when special situations such as emergency stops occur.
现有技术中,发生意外情况急停设备后,一般的做法是通过夹钳释放扳手来手动释放器械,即手动打开夹钳(钳口)。一方面,当插入夹钳释放扳手、打开钳口、清除钳口上的组织并将器械从系统移除时,需要使用手术部位的影像,而此时手术部位的影像不一定可用,并且如果扳手旋转方向错误,可能导致器械意外移动伤害患者或夹钳释放机制受损。另一方面,在这种情况下,需要尽快释放夹钳以免对患者造成进一步的伤害,而手动释放夹钳步骤多(取扳手、对准、插入、旋转)、需要的时间一般较长。In the prior art, after the emergency stop of the equipment in an unexpected situation, the general method is to manually release the instrument through the clamp release wrench, that is, to manually open the clamp (jaw). On the one hand, when inserting the clamp release wrench, opening the jaws, clearing tissue from the jaws, and removing the instrument from the system, imaging of the surgical site is required, not necessarily available, and if the wrench is rotated Incorrect orientation may result in unintentional movement of the instrument to injure the patient or damage to the clamp release mechanism. On the other hand, in this case, the clamp needs to be released as soon as possible to avoid further injury to the patient, and the manual release of the clamp has many steps (take wrench, align, insert, rotate) and generally takes a long time.
上述问题是目前亟待解决的。The above-mentioned problems are urgently to be solved at present.
发明内容Contents of the invention
本发明的目的是提供一种器械夹持力控制方法、微创手术机器人及可读存储介质。The object of the present invention is to provide a device clamping force control method, a minimally invasive surgical robot and a readable storage medium.
为了解决上述技术问题,本发明提供了一种器械夹持力控制方法,所述方法包括:In order to solve the above technical problems, the present invention provides a method for controlling the clamping force of an instrument, the method comprising:
接收表示具有器械的设备需要急停的第一输入信号;receiving a first input signal indicating that an emergency stop is required for the device having the implement;
依据接收的第一输入信号,控制器械夹末端的所述夹持力下降。According to the received first input signal, the clamping force at the tip of the instrument clamp is controlled to decrease.
进一步的,所述控制器械夹末端的所述夹持力下降,即:Further, the clamping force at the end of the clamp of the control instrument decreases, that is:
控制夹持力下降,且未下降至零。Controlled clamping force drops and does not drop to zero.
进一步的,所述控制器械夹末端的所述夹持力下降,即:Further, the clamping force at the end of the clamp of the control instrument decreases, that is:
控制夹持力下降至零。Control the clamping force down to zero.
进一步的,所述控制器械夹末端的所述夹持力下降,即:Further, the clamping force at the end of the clamp of the control instrument decreases, that is:
控制夹持力下降,并控制器械夹末端反向打开。Control the clamping force to drop, and control the reverse opening of the end of the instrument clamp.
进一步的,所述控制器械夹末端的所述夹持力下降的步骤采用控制器械驱动电机减小转矩或提供反向转矩的方式实现。Further, the step of controlling the decrease of the clamping force at the end of the instrument clamp is realized by controlling the instrument driving motor to reduce torque or provide reverse torque.
进一步的,还包括:依据接收的第一输入信号,停止接收主控夹持输入信号和/或封闭/切割输入信号。Further, it also includes: according to the received first input signal, stop receiving the main control clamping input signal and/or the sealing/cutting input signal.
进一步的,还包括:依据接收的第一输入信号,依据接收的第一输入信号,控制接收到的主控夹持输入信号和/或封闭/切割输入信号变为零。Further, the method further includes: according to the received first input signal, controlling the received main control clamping input signal and/or the closing/cutting input signal to become zero according to the received first input signal.
本发明还提供了一种微创手术机器人,包括:从手,所述从手包括:基座以及从手机械臂,所述从手机械臂上可拆卸地安装有手术器械,所述手术器械被如上述的器械夹持力控制方法进行控制。The present invention also provides a minimally invasive surgical robot, including: a slave hand, the slave hand includes: a base and a slave hand mechanical arm, and a surgical instrument is detachably installed on the slave hand mechanical arm, and the surgical instrument Controlled by the instrument clamping force control method as described above.
本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储至少一条指令,所述指令由处理器执行时实现如上述的器械夹持力控制方法。The present invention also provides a computer-readable storage medium, wherein at least one instruction is stored in the computer-readable storage medium, and when the instruction is executed by a processor, the above-mentioned instrument clamping force control method is implemented.
本发明还提供了一种电子设备,包括存储器和处理器;所述存储器中存储有至少一条指令;所述处理器,通过加载并执行所述指令以实现如上述的器械夹持力控制方法。The present invention also provides an electronic device, including a memory and a processor; at least one instruction is stored in the memory; and the processor implements the above method for controlling the clamping force of an instrument by loading and executing the instruction.
本发明的有益效果是,本发明提供了一种器械夹持力控制方法、微创手术机器人及可读存储介质,其中,器械夹持力控制方法包括:接收表示具有器械的设备需要急停的第一输入信号;依据接收的第一输入信号,控制器械夹末端的所述夹持力下降。微创手术机器人发生意外情况急停时,对其末端器械的夹持力控制,以实现尽快减弱夹持力乃至直接释放夹钳,从而防止对患者的意外伤害或者进一步损害。The beneficial effect of the present invention is that the present invention provides an instrument clamping force control method, a minimally invasive surgical robot and a readable storage medium, wherein the instrument clamping force control method comprises: receiving a first input signal; according to the received first input signal, controlling the clamping force at the end of the instrument clip to decrease. When the minimally invasive surgical robot stops suddenly due to an accident, the clamping force of the terminal instrument is controlled to weaken the clamping force as soon as possible or even release the clamp directly, so as to prevent accidental injury or further damage to the patient.
附图说明Description of drawings
下面结合附图和实施例对本发明进一步说明。The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
图1是本发明所提供的器械夹末端的结构示意图。Fig. 1 is a schematic structural view of the end of the instrument clip provided by the present invention.
图2是本发明所提供的器械夹持力控制方法的流程图。Fig. 2 is a flow chart of the method for controlling the clamping force of the instrument provided by the present invention.
图3是本发明所提供的急停发生在开始夹持的过程中各个器件的信号输入示意图。Fig. 3 is a schematic diagram of the signal input of each device in the process of starting clamping during the emergency stop provided by the present invention.
图4是本发明所提供的急停发生在完成封闭/切割之后各个器件的信号输入示意图。Fig. 4 is a schematic diagram of the signal input of each device after the emergency stop provided by the present invention is completed after sealing/cutting.
图5是本发明所提供的急停发生在开始夹持时各个器件的信号输入示意图。Fig. 5 is a schematic diagram of the signal input of each device when the emergency stop provided by the present invention occurs at the beginning of clamping.
图6是本发明所提供的急停发生在封闭/切割的过程中时,将各个器件的信号均进行下降处理的信号输入示意图。Fig. 6 is a schematic diagram of the signal input of all the signals of each device to be down-processed when the emergency stop provided by the present invention occurs during the sealing/cutting process.
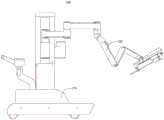
图7是发明所提供的从手的结构示意图。Fig. 7 is a schematic structural view of the slave hand provided by the invention.
图8是本发明所提供的从手在使用时的部分结构示意图。Fig. 8 is a partial structural diagram of the slave hand provided by the present invention in use.
图9是本发明所提供的手术器械的结构示意图。Fig. 9 is a schematic structural view of the surgical instrument provided by the present invention.
图10是本发明所提供的电子设备的部分结构示意图。Fig. 10 is a partial structural schematic diagram of the electronic device provided by the present invention.
图中:100、器械夹末端;110、腕部;120、掌部;130、指部;200、从手;210、基座;220、从手机械臂;221、手术器械;501、处理器;502、存储器。In the figure: 100, the end of the instrument clip; 110, the wrist; 120, the palm; 130, the finger; 200, the slave hand; 210, the base; 220, the slave arm; 221, the surgical instrument; 501, the processor ; 502. Storage.
具体实施方式Detailed ways
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
手术器械221夹持控制原理如下:The clamping control principle of the
请参阅图1,器械夹末端100包括腕部110、掌部120和指部130,以指部130为钳头的器械为例,两个钳头在医生的控制下开合,从而夹持住患者的组织。具体来说,医生操作主手的开合夹,从而来控制钳头的开合以及夹持力。Please refer to Fig. 1, the
在发出急停信号时,手术机器人的急停按钮与其他机械设备不同,并不是单纯的断电停止,而是会在执行一系列的预设命令后再停止,其过程不会断电。When the emergency stop signal is issued, the emergency stop button of the surgical robot is different from other mechanical equipment. It does not simply stop when the power is turned off, but it will stop after executing a series of preset commands, and the process will not be powered off.
医生或助手按下急停按钮后,控制器接收到急停信号,根据预设的程序执行相应的命令并使得手术机器人的各项动作停止。After the doctor or assistant presses the emergency stop button, the controller receives the emergency stop signal, executes the corresponding command according to the preset program and stops the various actions of the surgical robot.
实施例1Example 1
请参阅图2,本发明提供了一种器械夹持力控制方法,微创手术机器人发生意外情况急停时,对其末端器械的夹持力控制,以实现尽快减弱夹持力乃至直接释放夹钳,从而防止对患者的意外伤害。Please refer to Fig. 2. The present invention provides a method for controlling the clamping force of the instrument. When the minimally invasive surgical robot stops unexpectedly, the clamping force of the terminal instrument is controlled, so as to weaken the clamping force as soon as possible or even release the clamp directly. pliers, thereby preventing accidental injury to the patient.
具体来说,器械夹持力控制方法包括以下步骤:Specifically, the instrument clamping force control method includes the following steps:
S110:接收表示具有器械的设备需要急停的第一输入信号;S110: receiving a first input signal indicating that the equipment with the device needs to stop urgently;
具体来说,医生或助手按下急停按钮后,控制器接收到第一输入信号,此时,器械可能处于以下几个阶段中:夹持开始时发生急停、封闭/切割过程中发生急停、封闭/切割后发生急停。Specifically, after the doctor or assistant presses the emergency stop button, the controller receives the first input signal. At this time, the instrument may be in the following stages: emergency stop occurs at the beginning of clamping, emergency occurs during sealing/cutting. Emergency stop occurs after stop, closing/cutting.
S120:依据接收的第一输入信号,控制器械夹末端的所述夹持力下降。S120: According to the received first input signal, control the clamping force at the end of the instrument clamp to decrease.
具体来说,所述控制器械夹末端100的所述夹持力下降的步骤采用控制器械驱动电机的转矩的方式实现,即,电机的转矩降为零的耗时t反映了响应速度,其与转矩初始值、程序预设值和电机的性能三者相关。理论上来说,耗时t越小越好,但是会增加电机的成本。当然,电机指的是机械臂末端,安装的器械驱动盒中的驱动电机。该电机会给器械夹末端的钳头提供转矩,从而驱动钳头开合以及保持钳头的夹持力。Specifically, the step of controlling the decrease of the clamping force at the
实施例2Example 2
请参阅图3,本实施例采用实施例1所提供的器械夹持力控制方法,对急停发生在开始夹持的过程中进行夹持力控制,并且,实施例1中的步骤S120中的所述控制器械夹末端100的夹持力下降,即:控制夹持力下降至零。Please refer to Fig. 3, the present embodiment adopts the instrument clamping force control method provided in Embodiment 1, and controls the clamping force when the emergency stop occurs in the process of starting clamping, and, in step S120 in Embodiment 1 The clamping force of the
具体来说,医生给开合夹的主控夹持输入处于上升的阶段,即开合夹受到的力逐渐增加。还没有封闭/切割输入,同步的,从动夹持力也处于上升的阶段。当急停信号产生时,控制器控制电机的转矩极速下降至零,从而将器械夹末端(例如钳头)的夹持力减弱至零。其中,电机转矩降为零的耗时t反映了响应速度,其与转矩初始值、程序预设值和电机的性能三者相关。理论上来说,耗时t越小越好,但是会增加电机的成本。当然,电机指的是机械臂末端,安装的器械驱动盒中的驱动电机。该电机会给器械夹末端的钳头提供转矩,从而驱动钳头开合以及保持钳头的夹持力。Specifically, the doctor's main control clamping input to the opening and closing clip is in the rising stage, that is, the force on the opening and closing clip gradually increases. There is no closing/cutting input yet, and the synchronous, driven clamping force is also on the rise. When the emergency stop signal is generated, the controller controls the torque of the motor to drop to zero rapidly, thereby weakening the clamping force at the end of the instrument clamp (such as the pliers head) to zero. Wherein, the time t taken for the motor torque to drop to zero reflects the response speed, which is related to the initial value of the torque, the preset value of the program and the performance of the motor. Theoretically, the smaller the time-consuming t, the better, but it will increase the cost of the motor. Of course, the motor refers to the drive motor in the instrument drive box installed at the end of the mechanical arm. The motor will provide torque to the pliers head at the end of the instrument clamp, thereby driving the pliers head to open and close and maintaining the clamping force of the pliers head.
可以理解的是,在其他实施例中夹持力也可以不直接降为零,而是只要下降,即可减少对患者的意外伤害。It can be understood that in other embodiments, the clamping force may not be directly reduced to zero, but as long as it is reduced, accidental injuries to patients can be reduced.
在其他实施例中,所述控制器械夹末端100的夹持力下降还可以是:控制夹持力下降,并控制器械夹末端反向打开。此时,控制器控制电机的转矩极速下降至零并形成反向的转矩,从而将器械夹末端(例如钳头)的夹持力减弱至零并且还主动打开钳头,释放被夹住的患者组织。In other embodiments, the controlling the decrease of the clamping force of the end of the
需要说明的是,控制器械夹末端反向打开中的反向,指的是与夹持患者组织时器械夹末端的运行方向相反的方向。It should be noted that the reverse in controlling the reverse opening of the end of the instrument clip refers to the direction opposite to the running direction of the end of the instrument clip when clamping the patient's tissue.
实施例3Example 3
请参阅图4,本实施例采用实施例1所提供的器械夹持力控制方法,对急停发生在完成封闭/切割之后进行夹持力控制,并且,实施例1中的步骤S120中的所述控制器械夹末端100的夹持力下降,即:控制夹持力下降,并控制器械夹末端反向打开。需要说明的是,控制器械夹末端反向打开中的反向,指的是与夹持患者组织时器械夹末端的运行方向相反的方向。Please refer to Fig. 4, the present embodiment adopts the instrument clamping force control method provided in Embodiment 1, and controls the clamping force after the emergency stop occurs after closing/cutting is completed, and all the steps in step S120 in Embodiment 1 The clamping force at the end of the
具体来说,医生给开合夹的主控夹持输入还处于基本不变的阶段,并且钳头未执行封闭/切割动作,同步的,钳头的从动夹持力也处于基本不变的阶段。当急停信号产生时,控制器控制电机的转矩极速下降至零并形成反向的转矩,从而将器械夹末端(例如钳头)的夹持力减弱至零并且还主动打开钳头,释放被夹住的患者组织。Specifically, the doctor's master control input to the opening and closing clip is still in a basically constant stage, and the clamp head does not perform the closing/cutting action, synchronously, the slave clamping force of the clamp head is also in a basically constant stage . When the emergency stop signal is generated, the controller controls the torque of the motor to drop to zero and form a reverse torque, thereby weakening the clamping force at the end of the instrument clamp (such as the clamp head) to zero and actively opening the clamp head, Release clamped patient tissue.
在其他实施例中,实施例1中的步骤S120中的所述控制器械夹末端100的夹持力下降即:控制夹持力下降至零。此时,器械夹末端100将夹住的患者组织完全松开,从而避免器械拔出时对患者造成意外伤害。In other embodiments, in step S120 of Embodiment 1, the control of the clamping force of the
在其他实施例中,实施例1中的步骤S120中的所述控制器械夹末端100的夹持力下降即:控制夹持力下降,且未下降至零,即可减少对患者的意外伤害。In other embodiments, in the step S120 of Embodiment 1, the clamping force at the end of the
实施例4Example 4
请参阅图5,本实施例采用实施例1所提供的器械夹持力控制方法,对急停发生在开始夹持时进行夹持力控制,并且,实施例1中的步骤S120中的所述控制器械夹末端100的夹持力,即:控制夹持力下降,且未下降至零。Please refer to Fig. 5, this embodiment adopts the device clamping force control method provided in Embodiment 1 to control the clamping force when the emergency stop occurs at the beginning of clamping, and the step S120 in the embodiment 1 Control the clamping force at the
具体来说,医生给开合夹的主控夹持输入处于上升的阶段(即开合夹受到的力逐渐增加),还没有封闭/切割输入,同步的,从动夹持力也处于上升的阶段。当急停信号产生时,控制器控制电机的转矩极速下降,从而将器械夹末端(例如钳头)的夹持力减弱,即可减少对患者的意外伤害。Specifically, the doctor’s master clamping input to the opening and closing clip is in the rising stage (that is, the force on the opening and closing clip is gradually increasing), and there is no closing/cutting input, and the synchronous, driven clamping force is also in the rising stage . When the emergency stop signal is generated, the controller controls the torque of the motor to drop rapidly, thereby weakening the clamping force at the end of the instrument clamp (such as the clamp head), which can reduce accidental injuries to patients.
在其他实施例中,实施例1中的步骤S120中的所述控制器械夹末端100的夹持力下降即:控制夹持力下降至零。此时,器械夹末端100将夹住的患者组织完全松开,从而避免器械拔出时对患者造成意外伤害。In other embodiments, in step S120 of Embodiment 1, the control of the clamping force of the
在其他实施例中,所述控制器械夹末端100的夹持力下降还可以是:控制夹持力下降,并控制器械夹末端反向打开。此时,控制器控制电机的转矩极速下降至零并形成反向的转矩,从而将器械夹末端(例如钳头)的夹持力减弱至零并且还主动打开钳头,释放被夹住的患者组织。In other embodiments, the controlling the decrease of the clamping force of the end of the
实施例5Example 5
请参阅图6,本实施例提供了一种器械夹持力控制方法,在实施例1所提供的器械夹持力控制方法的基础上,所述器械夹持力控制方法还包括:Please refer to Fig. 6. This embodiment provides a method for controlling the clamping force of an instrument. On the basis of the method for controlling the clamping force of an instrument provided in Embodiment 1, the method for controlling the clamping force of an instrument further includes:
S130:依据接收的第一输入信号,停止接收主控夹持输入信号和/或封闭/切割输入信号。S130: According to the received first input signal, stop receiving the main control clamping input signal and/or the sealing/cutting input signal.
并以急停发生在封闭/切割的过程中为例进行说明,当急停发生时,停止接收主控夹持输入信号和封闭/切割输入信号,从动夹持信号均极速降为零,也就是说除了对从动夹持信号进行处理外,还停止接收主控夹持输入信号、封闭/切割输入信号。此种方式无论开合夹上受到何种力或者踏板受到何种控制,相应信号均不会发生改变(都是零),也就避免了对相应信号进行处理、计算等过程,简化了控制过程,降低了运算成本。And take the emergency stop occurring in the process of closing/cutting as an example to illustrate, when the emergency stop occurs, stop receiving the main control clamping input signal and closing/cutting input signal, and the slave clamping signal drops to zero extremely quickly, also That is to say, in addition to processing the slave clamping signal, it also stops receiving the master clamping input signal and the closing/cutting input signal. In this way, no matter what kind of force is applied to the opening and closing clip or what kind of control the pedal is subjected to, the corresponding signal will not change (all are zero), which avoids the processing and calculation of the corresponding signal, and simplifies the control process. , reducing the operation cost.
在其他实施例中夹持力也可以不直接降为零,而是只要下降,即可减少对患者的意外伤害。In other embodiments, the clamping force may not be directly reduced to zero, but as long as it is reduced, the accidental injury to the patient can be reduced.
在其他实施例中,所述控制器械夹末端100的夹持力下降还可以是控制夹持力下降,并控制器械夹末端反向打开。此时,控制器控制电机的转矩极速下降至零并形成反向的转矩,从而将器械夹末端(例如钳头)的夹持力减弱至零并且还主动打开钳头,释放被夹住的患者组织。In other embodiments, controlling the decrease of the clamping force of the end of the
需要说明的是,本实施例中,仅以急停发生在封闭/切割的过程中为例进行说明,在其他实施例中,急停还可以发生在夹持开始时或者封闭/切割后,均在本发明的保护范围之内。It should be noted that in this embodiment, the emergency stop occurs during the sealing/cutting process as an example. In other embodiments, the emergency stop can also occur at the beginning of clamping or after sealing/cutting. Within the protection scope of the present invention.
在其他实施例中,步骤S130还可以是:依据接收的第一输入信号,控制接收到的主控夹持输入信号和/或封闭/切割输入信号变为零。具体来说,系统还是正常接收主控夹持输入信号、封闭/切割输入信号,只是在收到信号时就将该信号变为零,与未接收到信号的结果一样,避免了复杂的处理、计算过程。In other embodiments, step S130 may also be: according to the received first input signal, control the received master clamping input signal and/or the sealing/cutting input signal to become zero. Specifically, the system still normally receives the main control clamping input signal and closing/cutting input signal, but when the signal is received, the signal is changed to zero, which is the same as the result of not receiving the signal, avoiding complicated processing, calculation process.
实施例6Example 6
请参阅图7-图9,本实施例提供了一种微创手术机器人,主手以及从手200,所述从手200包括:基座210以及从手机械臂220,所述从手机械臂220具有手术器械221,所述手术器械221采用如实施例1-实施例5任一项所提供的器械夹持力控制方法对夹持力进行控制。Please refer to Fig. 7-Fig. 9, the present embodiment provides a kind of minimally invasive surgery robot, main hand and
实施例7Example 7
本实施例提供了一种计算机可读存储介质,所述计算机可读存储介质中存储至少一条的指令,所述指令由处理器执行时实现如实施例1-实施例5中任一所述的器械夹持力控制方法。This embodiment provides a computer-readable storage medium, where at least one instruction is stored in the computer-readable storage medium, and when the instruction is executed by a processor, the method described in any one of Embodiment 1-Embodiment 5 is implemented. Instrument clamping force control method.
器械夹持力控制方法包括:接收急停信号;依据接收的急停信号,控制器械夹末端的夹持力下降。微创手术机器人发生意外情况急停时,对其末端器械的夹持力控制,以实现尽快减弱夹持力乃至直接释放夹钳,从而防止对患者的意外伤害。The method for controlling the clamping force of the instrument includes: receiving an emergency stop signal; and controlling the clamping force at the end of the instrument clamp to decrease according to the received emergency stop signal. When the minimally invasive surgical robot stops suddenly in an unexpected situation, the clamping force of the terminal instrument is controlled to weaken the clamping force as soon as possible or even release the clamp directly, so as to prevent accidental injury to the patient.
实施例8Example 8
请参阅图10,本实施例提供了一种电子设备,包括:存储器502和处理器501;所述存储器502中存储有至少一条程序指令;所述处理器501,通过加载并执行所述至少一条程序指令以实现如实施例1-实施例5所提供的器械夹持力控制方法。Please refer to FIG. 10 , this embodiment provides an electronic device, including: a
存储器502和处理器501采用总线方式连接,总线可以包括任意数量的互联的总线和桥,总线将一个或多个处理器501和存储器502的各种电路连接在一起。总线还可以将诸如外围设备、稳压器和功率管理电路等之类的各种其他电路连接在一起,这些都是本领域所公知的,因此,本文不再对其进行进一步描述。总线接口在总线和收发机之间提供接口。收发机可以是一个元件,也可以是多个元件,比如多个接收器和发送器,提供用于在传输介质上与各种其他装置通信的单元。经处理器501处理的数据通过天线在无线介质上进行传输,进一步,天线还接收数据并将数据传送给处理器501。The
处理器501负责管理总线和通常的处理,还可以提供各种功能,包括定时,外围接口,电压调节、电源管理以及其他控制功能。而存储器502可以被用于存储处理器501在执行操作时所使用的数据。
综上所述,本发明提供了一种器械夹持力控制方法、微创手术机器人及可读存储介质,其中,器械夹持力控制方法包括:接收急停信号;依据接收的急停信号,控制器械夹末端的夹持力下降。微创手术机器人发生意外情况急停时,对其末端器械的夹持力控制,以实现尽快减弱夹持力乃至直接释放夹钳,从而防止对患者的意外伤害。In summary, the present invention provides a method for controlling the clamping force of an instrument, a minimally invasive surgical robot, and a readable storage medium, wherein the method for controlling the clamping force of an instrument includes: receiving an emergency stop signal; according to the received emergency stop signal, Controls the drop in clamping force at the end of the instrument clamp. When the minimally invasive surgical robot stops suddenly in an unexpected situation, the clamping force of the terminal instrument is controlled to weaken the clamping force as soon as possible or even release the clamp directly, so as to prevent accidental injury to the patient.
本申请中选用的各个器件(未说明具体结构的部件)均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。并且,本申请所涉及的软件程序均为现有技术,本申请不涉及对软件程序作出任何改进。Each device selected in this application (parts with no specific structure specified) is a general standard part or a part known to those skilled in the art, and its structure and principle are known to those skilled in the art through technical manuals or through conventional experimental methods informed. Moreover, the software programs involved in this application are all prior art, and this application does not involve making any improvements to the software programs.
在本发明实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。In the description of the embodiments of the present invention, unless otherwise clearly stipulated and limited, the terms "installation", "connection" and "connection" should be understood in a broad sense, for example, it can be a fixed connection or a detachable connection, or Integral connection; it can be mechanical connection or electrical connection; it can be direct connection or indirect connection through an intermediary, and it can be the internal communication of two components. Those of ordinary skill in the art can understand the specific meanings of the above terms in the present invention in specific situations.
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。In the description of the present invention, it should be noted that the terms "center", "upper", "lower", "left", "right", "vertical", "horizontal", "inner", "outer" etc. The indicated orientation or positional relationship is based on the orientation or positional relationship shown in the drawings, and is only for the convenience of describing the present invention and simplifying the description, rather than indicating or implying that the referred device or element must have a specific orientation, or in a specific orientation. construction and operation, therefore, should not be construed as limiting the invention. In addition, the terms "first", "second", and "third" are used for descriptive purposes only, and should not be construed as indicating or implying relative importance.
在本申请所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,又例如,多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些通信接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。In the several embodiments provided in this application, it should be understood that the disclosed systems, devices and methods may be implemented in other ways. The device embodiments described above are only illustrative. For example, the division of the units is only a logical function division. In actual implementation, there may be other division methods. For example, multiple units or components can be combined or May be integrated into another system, or some features may be ignored, or not implemented. In another point, the mutual coupling or direct coupling or communication connection shown or discussed may be through some communication interfaces, and the indirect coupling or communication connection of devices or units may be in electrical, mechanical or other forms.
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。The units described as separate components may or may not be physically separated, and the components displayed as units may or may not be physical units, that is, they may be located in one place, or may be distributed to multiple network units. Part or all of the units can be selected according to actual needs to achieve the purpose of the solution of this embodiment.
另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。In addition, each functional unit in each embodiment of the present invention may be integrated into one processing unit, each unit may exist separately physically, or two or more units may be integrated into one unit.
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。Inspired by the above-mentioned ideal embodiment according to the present invention, through the above-mentioned description content, relevant workers can make various changes and modifications within the scope of not departing from the technical idea of the present invention. The technical scope of the present invention is not limited to the content in the specification, but must be determined according to the scope of the claims.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211257036.9ACN115887014A (en) | 2022-10-14 | 2022-10-14 | Apparatus clamping force control method, minimally invasive surgery robot and readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211257036.9ACN115887014A (en) | 2022-10-14 | 2022-10-14 | Apparatus clamping force control method, minimally invasive surgery robot and readable storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115887014Atrue CN115887014A (en) | 2023-04-04 |
Family
ID=86473427
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211257036.9APendingCN115887014A (en) | 2022-10-14 | 2022-10-14 | Apparatus clamping force control method, minimally invasive surgery robot and readable storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115887014A (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN203417225U (en)* | 2013-03-27 | 2014-02-05 | 北京中法派尔特医疗设备有限公司 | Electric surgery stapling instrument |
| US20140367446A1 (en)* | 2013-06-18 | 2014-12-18 | Covidien Lp | Method of emergency retraction for electro-mechanical surgical devices and systems |
| US20140367445A1 (en)* | 2013-06-18 | 2014-12-18 | Covidien Lp | Emergency retraction for electro-mechanical surgical devices and systems |
| CN113952035A (en)* | 2020-11-19 | 2022-01-21 | 李志强 | Multi-degree-of-freedom holding mirror device |
| CN114404050A (en)* | 2022-01-26 | 2022-04-29 | 合肥工业大学 | A minimally invasive surgical robot control terminal and robot system |
- 2022
- 2022-10-14CNCN202211257036.9Apatent/CN115887014A/enactivePending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN203417225U (en)* | 2013-03-27 | 2014-02-05 | 北京中法派尔特医疗设备有限公司 | Electric surgery stapling instrument |
| US20140367446A1 (en)* | 2013-06-18 | 2014-12-18 | Covidien Lp | Method of emergency retraction for electro-mechanical surgical devices and systems |
| US20140367445A1 (en)* | 2013-06-18 | 2014-12-18 | Covidien Lp | Emergency retraction for electro-mechanical surgical devices and systems |
| CN113952035A (en)* | 2020-11-19 | 2022-01-21 | 李志强 | Multi-degree-of-freedom holding mirror device |
| CN114404050A (en)* | 2022-01-26 | 2022-04-29 | 合肥工业大学 | A minimally invasive surgical robot control terminal and robot system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11780092B2 (en) | Robotic surgical system and method for handling real-time and non-real-time traffic | |
| Horgan et al. | Robots in laparoscopic surgery | |
| EP4309612A1 (en) | Control method for surgical robot system, readable storage medium, and robot system | |
| CN111643191B (en) | Surgical robot system | |
| Magrina | Robotic surgery in gynecology. | |
| CN110418620A (en) | Control surgical instrument | |
| JP7463615B2 (en) | Surgical robotic system and method for transferring control to a secondary robotic controller - Patents.com | |
| US20120053597A1 (en) | Mobile robotic surgical system | |
| US9168061B1 (en) | Uterine clamp for treating postpartum hemorrhage and facilitating uterine repairs | |
| JP2004180781A (en) | Endoscopic surgery robot | |
| CN116018106A (en) | Inverse kinematics of a teleoperated surgical robot using hardware constraints | |
| EP3254638A1 (en) | Medical manipulator system and control method therefor | |
| CN116196111B (en) | An ophthalmic surgery robot system and its control method | |
| WO2025060846A1 (en) | Surgical robot system and control method therefor | |
| WO2022166929A1 (en) | Computer-readable storage medium, electronic device, and surgical robot system | |
| Pappas et al. | Senhance surgical system: robotic-assisted digital laparoscopy for abdominal, pelvic, and thoracoscopic procedures | |
| CN114668513A (en) | Robot-Assisted Surgery System | |
| CN114848152A (en) | Computer-readable storage medium, electronic device, and surgical robot system | |
| CN115887014A (en) | Apparatus clamping force control method, minimally invasive surgery robot and readable storage medium | |
| CN221688674U (en) | Communication system of laparoscopic surgical robot and laparoscopic surgical robot | |
| CN113456229A (en) | Robot system for abdominal cavity operation | |
| US20250127578A1 (en) | Multi-arm robotic surgical system | |
| CN208851636U (en) | Endoscopic surgery robot control terminal and robot system | |
| CN117442343A (en) | Endoscopic surgery robot and visual display method for state of endoscopic surgery robot | |
| JP3235810U (en) | Surgical robot system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB02 | Change of applicant information | ||
| CB02 | Change of applicant information | Country or region after:China Address after:311121 Hangzhou City, Yuhang District, Yuhang Street, Keji Avenue 39, Building 1, first floor, Building 2, first to fourth floors Applicant after:Hangzhou Kangji Weijing Medical Robot Co.,Ltd. Address before:Building 1, 1st Floor, and Building 2, 1-4 Floors, No. 39 Keji Avenue, Yuhang Street, Yuhang District, Hangzhou City, Zhejiang Province Applicant before:Hangzhou Weijing medical robot Co.,Ltd. Country or region before:China |