CN115862334A - Vehicle Conflict Prediction Method, Device, Equipment and Storage Medium at Road Intersection - Google Patents
Vehicle Conflict Prediction Method, Device, Equipment and Storage Medium at Road IntersectionDownload PDFInfo
- Publication number
- CN115862334A CN115862334ACN202211644357.4ACN202211644357ACN115862334ACN 115862334 ACN115862334 ACN 115862334ACN 202211644357 ACN202211644357 ACN 202211644357ACN 115862334 ACN115862334 ACN 115862334A
- Authority
- CN
- China
- Prior art keywords
- vehicle
- target vehicle
- risk
- dynamic interaction
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Traffic Control Systems (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域Technical Field
本发明实施例涉及智能驾驶和交通安全技术领域,尤其涉及一种道路交叉口的车辆冲突预测方法、装置、设备及存储介质。Embodiments of the present invention relate to the field of intelligent driving and traffic safety technology, and in particular to a method, device, equipment and storage medium for predicting vehicle conflicts at road intersections.
背景技术Background Art
道路交叉口作为城市交通的重要组成部分,不同流向、不同类型的交通工具均在此处集中交互,是影响城市交通运行与交通安全的关键。因此,对道路交叉口进行科学合理地管理是缓解交通拥堵和减少交通事故的有效途径。车辆冲突场景的预测是进行科学交通管控的前提基础,能够基于行驶数据对潜在的事故风险进行分析,对提高交通效率和保障交通安全具有重要意义。Road intersections are an important part of urban traffic. Different directions and types of vehicles interact here, which is the key to urban traffic operation and traffic safety. Therefore, scientific and reasonable management of road intersections is an effective way to alleviate traffic congestion and reduce traffic accidents. The prediction of vehicle conflict scenarios is the prerequisite for scientific traffic control. It can analyze potential accident risks based on driving data, which is of great significance to improving traffic efficiency and ensuring traffic safety.
发明内容Summary of the invention
本发明实施例提供一种道路交叉口的车辆冲突预测方法、装置、设备及存储介质,可以准确的对道路交叉口中的车辆冲突进行预测,从而为缓解交通拥堵和减少交通事故提供可靠的依据。The embodiments of the present invention provide a method, device, equipment and storage medium for predicting vehicle conflicts at road intersections, which can accurately predict vehicle conflicts at road intersections, thereby providing a reliable basis for alleviating traffic congestion and reducing traffic accidents.
第一方面,本发明实施例提供了一种道路交叉口的车辆冲突预测方法,该方法包括:In a first aspect, an embodiment of the present invention provides a method for predicting vehicle conflicts at a road intersection, the method comprising:
获取处于道路交叉口的车辆,作为目标车辆;Acquire a vehicle at a road intersection as a target vehicle;
对所述目标车辆的行驶轨迹进行预测,获得预测行驶轨迹;Predicting the driving trajectory of the target vehicle to obtain a predicted driving trajectory;
基于所述预测行驶轨迹实时生成各所述目标车辆的动态交互框;Generating a dynamic interaction frame of each target vehicle in real time based on the predicted driving trajectory;
基于所述动态交互框对车辆冲突进行预测。Vehicle conflicts are predicted based on the dynamic interaction frame.
第二方面,本发明实施例还提供了一种道路交叉口的车辆冲突预测装置,该装置包括:In a second aspect, an embodiment of the present invention further provides a vehicle conflict prediction device at a road intersection, the device comprising:
目标车辆获取模块,用于获取处于道路交叉口的车辆,作为目标车辆;A target vehicle acquisition module is used to acquire a vehicle at a road intersection as a target vehicle;
行驶轨迹预测模块,用于对所述目标车辆的行驶轨迹进行预测,获得预测行驶轨迹;A driving trajectory prediction module, used to predict the driving trajectory of the target vehicle to obtain a predicted driving trajectory;
交互框生成模块,用于基于所述预测行驶轨迹实时生成各所述目标车辆的动态交互框;An interaction frame generation module, used for generating a dynamic interaction frame of each target vehicle in real time based on the predicted driving trajectory;
车辆冲突预测模块,用于基于所述动态交互框对车辆冲突进行预测。The vehicle conflict prediction module is used to predict the vehicle conflict based on the dynamic interaction frame.
第三方面,本公开实施例还提供电子设备,所述电子设备,包括:In a third aspect, an embodiment of the present disclosure further provides an electronic device, the electronic device comprising:
一个或多个处理器;one or more processors;
存储装置,用于存储一个或多个程序,a storage device for storing one or more programs,
当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现本公开实施例提供的道路交叉口的车辆冲突预测方法。When the one or more programs are executed by the one or more processors, the one or more processors implement the vehicle conflict prediction method at the road intersection provided by the embodiment of the present disclosure.
第四方面,本公开实施例还提供了包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行实现本公开实施例提供的道路交叉口的车辆冲突预测方法。In a fourth aspect, the embodiments of the present disclosure further provide a storage medium comprising computer executable instructions, which, when executed by a computer processor, are used to implement the vehicle conflict prediction method for a road intersection provided by the embodiments of the present disclosure.
本发明公开了一种道路交叉口的车辆冲突预测方法、装置、设备及存储介质,该方法包括:获取处于道路交叉口的车辆,作为目标车辆;对所述目标车辆的行驶轨迹进行预测,获得预测行驶轨迹;基于所述预测行驶轨迹实时生成各所述目标车辆的动态交互框;基于所述动态交互框对车辆冲突进行预测。通过轨迹预测方法,将原始长方形框改为基于预测轨迹的曲线框,既能够更好描述车辆行驶时的复杂转向行为,又能够考虑到车辆的预期驾驶行为以提前辨识潜在冲突对象。同时针对道路交叉口的交互情况,从空间和时间预测冲突的辨识方法,减少计算量的同时保证了预测车辆冲突的准确性。The present invention discloses a method, device, equipment and storage medium for predicting vehicle conflicts at road intersections. The method includes: obtaining a vehicle at a road intersection as a target vehicle; predicting the driving trajectory of the target vehicle to obtain a predicted driving trajectory; generating a dynamic interaction frame of each target vehicle in real time based on the predicted driving trajectory; and predicting vehicle conflicts based on the dynamic interaction frame. Through the trajectory prediction method, the original rectangular frame is changed to a curve frame based on the predicted trajectory, which can better describe the complex steering behavior of the vehicle during driving, and can also take into account the expected driving behavior of the vehicle to identify potential conflicting objects in advance. At the same time, in view of the interaction situation at the road intersection, the identification method of predicting conflicts from space and time reduces the amount of calculation while ensuring the accuracy of predicting vehicle conflicts.
附图说明BRIEF DESCRIPTION OF THE DRAWINGS
结合附图并参考以下具体实施方式,本公开各实施例的上述和其他特征、优点及方面将变得更加明显。贯穿附图中,相同或相似的附图标记表示相同或相似的元素。应当理解附图是示意性的,原件和元素不一定按照比例绘制。The above and other features, advantages and aspects of the embodiments of the present disclosure will become more apparent with reference to the following detailed description in conjunction with the accompanying drawings. Throughout the accompanying drawings, the same or similar reference numerals represent the same or similar elements. It should be understood that the drawings are schematic and the originals and elements are not necessarily drawn to scale.
图1为本公开实施例所提供的一种道路交叉口的车辆冲突预测方法的流程图;FIG1 is a flow chart of a method for predicting vehicle conflicts at a road intersection provided by an embodiment of the present disclosure;
图2为本公开实施例所提供的一种道路交叉口的车辆冲突预测方法的道路交叉口范围示例图;FIG2 is an example diagram of a road intersection range of a vehicle conflict prediction method at a road intersection provided by an embodiment of the present disclosure;
图3为本公开实施例所提供的一种道路交叉口的车辆冲突预测方法的跟驰前车识别示例图;FIG3 is an example diagram of identifying a vehicle following a preceding vehicle in a vehicle conflict prediction method at a road intersection provided by an embodiment of the present disclosure;
图4为本公开实施例所提供的一种道路交叉口的车辆冲突预测方法的动态交互框示意图;FIG4 is a schematic diagram of a dynamic interaction block diagram of a vehicle conflict prediction method at a road intersection provided by an embodiment of the present disclosure;
图5为本公开实施例所提供的一种道路交叉口的车辆冲突预测方法的基于轨迹的动态交互框示意图;FIG5 is a schematic diagram of a dynamic interaction block diagram based on trajectories of a vehicle conflict prediction method at a road intersection provided by an embodiment of the present disclosure;
图6为本公开实施例所提供的一种道路交叉口的车辆冲突预测方法的左转专用相位的交叉口冲突示意图;FIG6 is a schematic diagram of an intersection conflict in a left-turn dedicated phase of a vehicle conflict prediction method for a road intersection provided by an embodiment of the present disclosure;
图7为本公开实施例所提供的一种道路交叉口的车辆冲突预测方法的空间上冲突判断示意图;FIG7 is a schematic diagram of spatial conflict judgment of a vehicle conflict prediction method at a road intersection provided by an embodiment of the present disclosure;
图8为本公开实施例所提供的一种道路交叉口的车辆冲突预测方法的时间上冲突判断示意图;FIG8 is a schematic diagram of time conflict judgment of a vehicle conflict prediction method at a road intersection provided by an embodiment of the present disclosure;
图9为本公开实施例所提供的一种道路交叉口的车辆冲突预测方法的心理-物理风险场示意图;FIG9 is a schematic diagram of a psychophysical risk field of a vehicle conflict prediction method at a road intersection provided by an embodiment of the present disclosure;
图10为本公开实施例所提供的一种道路交叉口的车辆冲突预测装置的结构示意图;FIG10 is a schematic diagram of the structure of a vehicle conflict prediction device at a road intersection provided by an embodiment of the present disclosure;
图11为本公开实施例所提供的一种电子设备的结构示意图。FIG. 11 is a schematic diagram of the structure of an electronic device provided in an embodiment of the present disclosure.
具体实施方式DETAILED DESCRIPTION
下面将参照附图更详细地描述本公开的实施例。虽然附图中显示了本公开的某些实施例,然而应当理解的是,本公开可以通过各种形式来实现,而且不应该被解释为限于这里阐述的实施例,相反提供这些实施例是为了更加透彻和完整地理解本公开。应当理解的是,本公开的附图及实施例仅用于示例性作用,并非用于限制本公开的保护范围。Embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although certain embodiments of the present disclosure are shown in the accompanying drawings, it should be understood that the present disclosure can be implemented in various forms and should not be construed as being limited to the embodiments described herein, which are instead provided for a more thorough and complete understanding of the present disclosure. It should be understood that the drawings and embodiments of the present disclosure are only for exemplary purposes and are not intended to limit the scope of protection of the present disclosure.
应当理解,本公开的方法实施方式中记载的各个步骤可以按照不同的顺序执行,和/或并行执行。此外,方法实施方式可以包括附加的步骤和/或省略执行示出的步骤。本公开的范围在此方面不受限制。It should be understood that the various steps described in the method embodiments of the present disclosure may be performed in different orders and/or in parallel. In addition, the method embodiments may include additional steps and/or omit the steps shown. The scope of the present disclosure is not limited in this respect.
本文使用的术语“包括”及其变形是开放性包括,即“包括但不限于”。术语“基于”是“至少部分地基于”。术语“一个实施例”表示“至少一个实施例”;术语“另一实施例”表示“至少一个另外的实施例”;术语“一些实施例”表示“至少一些实施例”。其他术语的相关定义将在下文描述中给出。The term "including" and its variations used herein are open inclusions, i.e., "including but not limited to". The term "based on" means "based at least in part on". The term "one embodiment" means "at least one embodiment"; the term "another embodiment" means "at least one additional embodiment"; the term "some embodiments" means "at least some embodiments". The relevant definitions of other terms will be given in the following description.
需要注意,本公开中提及的“第一”、“第二”等概念仅用于对不同的装置、模块或单元进行区分,并非用于限定这些装置、模块或单元所执行的功能的顺序或者相互依存关系。It should be noted that the concepts such as "first" and "second" mentioned in the present disclosure are only used to distinguish different devices, modules or units, and are not used to limit the order or interdependence of the functions performed by these devices, modules or units.
需要注意,本公开中提及的“一个”、“多个”的修饰是示意性而非限制性的,本领域技术人员应当理解,除非在上下文另有明确指出,否则应该理解为“一个或多个”。It should be noted that the modifications of "one" and "plurality" mentioned in the present disclosure are illustrative rather than restrictive, and those skilled in the art should understand that unless otherwise clearly indicated in the context, it should be understood as "one or more".
本公开实施方式中的多个装置之间所交互的消息或者信息的名称仅用于说明性的目的,而并不是用于对这些消息或信息的范围进行限制。The names of the messages or information exchanged between multiple devices in the embodiments of the present disclosure are only used for illustrative purposes and are not used to limit the scope of these messages or information.
可以理解的是,在使用本公开各实施例公开的技术方案之前,均应当依据相关法律法规通过恰当的方式对本公开所涉及个人信息的类型、使用范围、使用场景等告知用户并获得用户的授权。It is understandable that before using the technical solutions disclosed in the embodiments of the present disclosure, the types, scope of use, usage scenarios, etc. of the personal information involved in the present disclosure should be informed to the user and the user's authorization should be obtained in an appropriate manner in accordance with relevant laws and regulations.
例如,在响应于接收到用户的主动请求时,向用户发送提示信息,以明确地提示用户,其请求执行的操作将需要获取和使用到用户的个人信息。从而,使得用户可以根据提示信息来自主地选择是否向执行本公开技术方案的操作的电子设备、应用程序、服务器或存储介质等软件或硬件提供个人信息。For example, in response to receiving an active request from a user, a prompt message is sent to the user to clearly prompt the user that the operation requested to be performed will require obtaining and using the user's personal information. Thus, the user can autonomously choose whether to provide personal information to software or hardware such as an electronic device, application, server, or storage medium that performs the operation of the technical solution of the present disclosure according to the prompt message.
作为一种可选的但非限定性的实现方式,响应于接收到用户的主动请求,向用户发送提示信息的方式例如可以是弹窗的方式,弹窗中可以以文字的方式呈现提示信息。此外,弹窗中还可以承载供用户选择“同意”或者“不同意”向电子设备提供个人信息的选择控件。As an optional but non-limiting implementation, in response to receiving an active request from the user, the prompt information may be sent to the user in the form of a pop-up window, in which the prompt information may be presented in text form. In addition, the pop-up window may also carry a selection control for the user to choose "agree" or "disagree" to provide personal information to the electronic device.
可以理解的是,上述通知和获取用户授权过程仅是示意性的,不对本公开的实现方式构成限定,其它满足相关法律法规的方式也可应用于本公开的实现方式中。It is understandable that the above notification and the process of obtaining user authorization are merely illustrative and do not constitute a limitation on the implementation of the present disclosure. Other methods that meet the relevant laws and regulations may also be applied to the implementation of the present disclosure.
可以理解的是,本技术方案所涉及的数据(包括但不限于数据本身、数据的获取或使用)应当遵循相应法律法规及相关规定的要求。It is understandable that the data involved in this technical solution (including but not limited to the data itself, the acquisition or use of the data) shall comply with the requirements of relevant laws, regulations and relevant provisions.
实施例一Embodiment 1
图1为本公开实施例所提供的一种道路交叉口的车辆冲突预测的流程图,本公开实施例适用于可以准确的对道路交叉口中的车辆冲突进行预测的情形,该方法可以由道路交叉口的车辆冲突预测装置来执行,该装置可以通过软件和/或硬件的形式实现,可选的,通过电子设备来实现,该电子设备可以是移动终端、PC端或服务器等。Figure 1 is a flow chart of a vehicle conflict prediction at a road intersection provided by an embodiment of the present disclosure. The embodiment of the present disclosure is applicable to situations where vehicle conflicts at road intersections can be accurately predicted. The method can be executed by a vehicle conflict prediction device at a road intersection, which can be implemented in the form of software and/or hardware, and optionally, by an electronic device, which can be a mobile terminal, a PC or a server, etc.
如图1所示,本公开实施例提供的一种道路交叉口的车辆冲突预测方法,具体可以包括下述步骤:As shown in FIG1 , a vehicle conflict prediction method at a road intersection provided by an embodiment of the present disclosure may specifically include the following steps:
S110、获取处于道路交叉口的车辆,作为目标车辆。S110: Acquire a vehicle at a road intersection as a target vehicle.
具体的,需要知道的是,所有的车辆中的定位装置实时的本车的轨迹数据上传到服务平台中,其中服务平台可以是交通管理平台等。为了更聚焦道路交叉口内部面域的车辆冲突行为,需要对车辆轨迹进行范围筛选,考虑到冲突一般发生在交叉口内部与交叉口出口道处,截取出以交叉口中心为中点的一定范围作为交叉口范围。若车辆当前时刻的实际轨迹点处于设定交叉口范围内或者实际轨迹点将于一定时间内处于设定交叉口范围内,则将该车辆作为目标车辆。其中,一定时间可以是5s或者10s等,可以结合实际情况进行设定。Specifically, it is necessary to know that the real-time trajectory data of the vehicle in the positioning device of all vehicles is uploaded to the service platform, where the service platform can be a traffic management platform, etc. In order to focus more on the vehicle conflict behavior inside the road intersection, it is necessary to perform range screening on the vehicle trajectory. Considering that conflicts generally occur inside the intersection and at the intersection exit, a certain range with the center of the intersection as the midpoint is intercepted as the intersection range. If the actual trajectory point of the vehicle at the current moment is within the set intersection range or the actual trajectory point will be within the set intersection range within a certain period of time, the vehicle will be used as the target vehicle. Among them, the certain period of time can be 5s or 10s, etc., which can be set according to the actual situation.
示例性的,图2为本公开实施例所提供的一种道路交叉口范围的示例图;如图2所示,以交叉口中心为中点,远离各方向的出口道10m位置且平行出口道的四条直线作为边界线,所围成的矩形范围为交叉口范围,将处入交叉口范围内的车辆或者将于一定时间内处于交叉口范围内作为目标车辆。Exemplarily, Figure 2 is an example diagram of a road intersection range provided in an embodiment of the present disclosure; as shown in Figure 2, with the center of the intersection as the midpoint, four
在上述实施例的基础上,本公开实施例可以对获取处于道路交叉口的车辆,作为目标车辆具体可以包括下述步骤:On the basis of the above-mentioned embodiment, the embodiment of the present disclosure can obtain a vehicle at a road intersection as a target vehicle and specifically include the following steps:
a1)获取车辆当前时刻的实际轨迹点。a1) Get the actual trajectory points of the vehicle at the current moment.
b1)若实际轨迹点处于设定交叉口范围,则车辆处于道路交叉口,将车辆确定为目标车辆。b1) If the actual trajectory point is within the set intersection range, the vehicle is at a road intersection and is determined as a target vehicle.
具体的,获取车辆的实际轨迹点,若车辆当前时刻的实际轨迹点处于设定交叉口范围内或者实际轨迹点将于一定时间内处于设定交叉口范围内,则将该车辆作为目标车辆。其中,一定时间可以是5s或者10s等,可以结合实际情况进行设定。Specifically, the actual track point of the vehicle is obtained, and if the actual track point of the vehicle at the current moment is within the set intersection range or the actual track point will be within the set intersection range within a certain period of time, the vehicle is taken as the target vehicle. The certain period of time can be 5s or 10s, etc., which can be set according to the actual situation.
S120、对目标车辆的行驶轨迹进行预测,获得预测行驶轨迹。S120: predicting the driving trajectory of the target vehicle to obtain a predicted driving trajectory.
在本实施例中,对目标车辆的行驶轨迹进行预测,可以选择双向长短时记忆(Bi-LSTM)网络方法进行车辆未来轨迹的预测。基于Bi-LSTM网络的轨迹预测模型主要由三个部分组成,输入层、Bi-LSTM层以及输出层。历史轨迹输入信息由输入层输入,通过Bi-LSTM层进行预测获得预测结果,再由输出层输出预测结果。具体的,根据轨迹预测方法对车辆的轨迹点进行预测,然后将轨迹点进行曲线拟合,获得预测轨迹。最后根据车辆轨迹点的时间间隔计算相邻两个轨迹点的距离,将相应时间间隔的轨迹距离累加,即为轨迹真实曲线长度。In this embodiment, the driving trajectory of the target vehicle is predicted, and a bidirectional long short-term memory (Bi-LSTM) network method can be selected to predict the future trajectory of the vehicle. The trajectory prediction model based on the Bi-LSTM network mainly consists of three parts: an input layer, a Bi-LSTM layer, and an output layer. The historical trajectory input information is input by the input layer, and the prediction result is obtained by the Bi-LSTM layer, and then the prediction result is output by the output layer. Specifically, the trajectory points of the vehicle are predicted according to the trajectory prediction method, and then the trajectory points are curve fitted to obtain the predicted trajectory. Finally, the distance between two adjacent trajectory points is calculated according to the time interval of the vehicle trajectory points, and the trajectory distances of the corresponding time intervals are accumulated, which is the true curve length of the trajectory.

式中,S为轨迹真实曲线长度,N为时间段长度与时间间隔之比,si为分段i的轨迹长度,xi+1/xi第i+1/i个轨迹点x轴坐标,yi+1/yi第i+1/i个轨迹点y轴坐标。Where S is the true curve length of the trajectory, N is the ratio of the time segment length to the time interval,si is the trajectory length of segment i,xi+1 /xi is the x-axis coordinate of the i+1/i-th trajectory point, and yi+1 /yi is the y-axis coordinate of the i+1/i-th trajectory point.
S130、基于预测行驶轨迹实时生成各目标车辆的动态交互框。S130: Generate a dynamic interaction frame for each target vehicle in real time based on the predicted driving trajectory.
其中,动态交互框可以是一个曲线框,以目标车辆当前轨迹点为基准点,以车身宽度为拓展宽度向两侧拓展,根据上述预测行驶轨迹沿着车辆未来轨迹曲线延展一定长度形成的,用于后续对车辆冲突进行预测。Among them, the dynamic interaction box can be a curve box, which takes the current trajectory point of the target vehicle as the reference point and expands to both sides with the width of the vehicle body as the expansion width. It is formed by extending a certain length along the future trajectory curve of the vehicle according to the above-mentioned predicted driving trajectory, and is used for subsequent prediction of vehicle conflicts.
在上述实施例的基础上,本公开实施例可以在根据基于所述预测行驶轨迹实时生成各所述目标车辆的动态交互框可以包括下述步骤:On the basis of the above-mentioned embodiment, the embodiment of the present disclosure may include the following steps in real-time generating a dynamic interaction frame for each target vehicle based on the predicted driving trajectory:
a2)根据目标车辆的车宽和行驶方向生成静态交互框,根据目标车辆的中心点和车宽生成车身区域框。a2) Generate a static interaction frame according to the width and driving direction of the target vehicle, and generate a body area frame according to the center point and width of the target vehicle.
b2)对于当前目标车辆,根据当前目标车辆的静态交互框和其他目标车辆的车身区域框确定当前目标车辆的跟驰前车。b2) For the current target vehicle, the following vehicle ahead of the current target vehicle is determined according to the static interaction frame of the current target vehicle and the body area frames of other target vehicles.
c2)根据当前目标车辆和跟驰前车的行驶数据以及预测行驶轨迹生成当前目标车辆的动态交互框。c2) Generate a dynamic interaction frame of the current target vehicle according to the driving data of the current target vehicle and the preceding vehicle and the predicted driving trajectory.
具体的,图3为本公开实施例所提供的一种道路交叉口的车辆冲突预测方法的跟驰前车识别示例图;如图3所示,对于任意时刻的目标车辆,绘制以车身宽度为宽度、初始长度(例如50m)、沿着目标车辆行驶方向的长方形交互框,周围车辆以坐标点为圆心、半径(例如一般车的宽度是1.6-2m,车道是3m,即可以设半径为1m,即半径可取最大车宽的1/2)画圆,该圆形区域即为车身区域框。根据所有车身区域框与交互框的交集情况中最近的车辆确认为目标车辆所跟驰的前车。然后以目标车辆当前轨迹点为基准点,以车身宽度为拓展宽度向两侧拓展,以安全距离与实际距离中的最小值为轨迹曲线长度,沿着车辆未来轨迹曲线绘制动态交互框。Specifically, FIG3 is an example diagram of identifying a preceding vehicle in a vehicle conflict prediction method for a road intersection provided by an embodiment of the present disclosure; as shown in FIG3 , for a target vehicle at any time, a rectangular interaction frame is drawn with the width of the vehicle body as the width, the initial length (e.g., 50 m), and the target vehicle's driving direction. The surrounding vehicles draw a circle with the coordinate point as the center and the radius (e.g., the width of a general vehicle is 1.6-2 m, and the lane is 3 m, that is, the radius can be set to 1 m, that is, the radius can be taken as 1/2 of the maximum vehicle width). The circular area is the vehicle body area frame. The nearest vehicle is confirmed as the preceding vehicle followed by the target vehicle based on the intersection of all vehicle body area frames and the interaction frame. Then, the current trajectory point of the target vehicle is used as the reference point, and the vehicle body width is used as the expansion width to expand to both sides, and the minimum value between the safety distance and the actual distance is used as the trajectory curve length, and a dynamic interaction frame is drawn along the future trajectory curve of the vehicle.
在上述实施例的基础上,本公开实施例可以对根据当前目标车辆的静态交互框和其他目标车辆的车身区域框确定当前目标车辆的跟驰前车具体可以包括下述步骤:On the basis of the above-mentioned embodiments, the embodiments of the present disclosure may specifically include the following steps for determining the preceding vehicle of the current target vehicle according to the static interaction frame of the current target vehicle and the body region frames of other target vehicles:
b21)将车身区域框与静态交互框有交集的其他目标车辆确定为当前目标车辆的前车。b21) determining other target vehicles whose vehicle body area frame intersects with the static interaction frame as the preceding vehicles of the current target vehicle.
b22)将与当前目标车辆距离最近的前车确定为跟驰前车。b22) The preceding vehicle which is closest to the current target vehicle is determined as the following preceding vehicle.
具体的,如果其他目标车辆的上述车身区域框与静态交互框有交集,则认为该车辆位于目标车辆前方。其中,与目标车辆距离最近的车辆看作是目标车辆的跟驰前车。Specifically, if the body area frame of another target vehicle intersects with the static interaction frame, the vehicle is considered to be located in front of the target vehicle. The vehicle closest to the target vehicle is considered to be the following vehicle of the target vehicle.
在上述实施例的基础上,本公开实施例可以对根据当前目标车辆和跟驰前车的行驶数据以及预测行驶轨迹生成当前目标车辆的动态交互框具体可以包括下述步骤:On the basis of the above-mentioned embodiments, the embodiments of the present disclosure may generate a dynamic interaction frame of the current target vehicle according to the driving data of the current target vehicle and the preceding vehicle and the predicted driving trajectory, which may specifically include the following steps:
c21)根据行驶数据确定当前目标车辆与跟驰前车的安全距离,并获得当前目标车辆与跟驰前车的实际距离。c21) determining a safe distance between the current target vehicle and the vehicle ahead of the vehicle according to the driving data, and obtaining an actual distance between the current target vehicle and the vehicle ahead of the vehicle.
c22)将安全距离和实际距离两者中的最小值作为动态交互框的拓展长度,将当前目标车辆的车宽作为动态交互框的拓展宽度。c22) The minimum value between the safety distance and the actual distance is used as the extension length of the dynamic interaction box, and the width of the current target vehicle is used as the extension width of the dynamic interaction box.
c23)对预测行驶轨迹采用微元法进行计算,生成拓展长度的轨迹曲线。c23) The predicted driving trajectory is calculated using the differential element method to generate a trajectory curve with an extended length.
c24)根据两条轨迹曲线和拓展宽度生成动态交互框;其中,动态交互框从车头开始向前沿伸。c24) generating a dynamic interaction frame according to the two trajectory curves and the expansion width; wherein the dynamic interaction frame extends from the front of the vehicle to the front.
具体的,安全距离为主车与前车之间的最小安全距离定义为在最恶劣的情况下仍可以避免碰撞的距离。Specifically, the safety distance is defined as the minimum safety distance between the host vehicle and the preceding vehicle, which is a distance that can still avoid a collision in the worst case.
如图4所示,初始动态交互框可以为:以车辆宽度为交互框拓展宽度,以安全距离dmin与实际距离dreal两者中的最小值为动态交互框拓展长度,沿着主车前进方向绘制的长方形交互框。As shown in FIG4 , the initial dynamic interaction frame may be a rectangular interaction frame drawn along the main vehicle's forward direction, with the vehicle width as the interaction frame extension width, the minimum of the safety distance dmin and the actual distance dreal as the dynamic interaction frame extension length.
如图5所示,以目标车辆当前轨迹点为基准点,以车身宽度为拓展宽度向两侧拓展,以安全距离与实际距离中的最小值为轨迹曲线长度,对基于预测行驶轨迹采用微元法进行计算,生成拓展长度的轨迹曲线,根据上述预测行驶轨迹沿着车辆未来轨迹曲线绘制动态交互框。其中,动态交互框从车头开始向前沿伸。As shown in Figure 5, the current trajectory point of the target vehicle is used as the reference point, the vehicle body width is used as the extension width to expand to both sides, and the minimum value between the safety distance and the actual distance is used as the trajectory curve length. The predicted driving trajectory is calculated using the microelement method to generate a trajectory curve with an extension length. According to the above predicted driving trajectory, a dynamic interaction frame is drawn along the future trajectory curve of the vehicle. Among them, the dynamic interaction frame starts from the front of the vehicle and extends to the front.
可选的,当车辆转弯时,调整动态曲线框的曲线长度,本实施例中,需要增长动态曲线框的曲线长度,这样做的好处是,以满足本车车体与前车车体之间的直线距离大于或等于安全距离。Optionally, when the vehicle turns, the curve length of the dynamic curve box is adjusted. In this embodiment, the curve length of the dynamic curve box needs to be increased. The advantage of doing so is to ensure that the straight-line distance between the body of the vehicle and the body of the vehicle in front is greater than or equal to the safety distance.
S140、基于动态交互框对车辆冲突进行预测。S140: predicting vehicle conflicts based on the dynamic interaction frame.
具体的,对所有目标车辆进行判别车辆是否冲突,应从空间与时间两个维度进行判别,首先判断任意两车之间的动态交互框是否存在交集,该交集即为两车的物理空间上的冲突区域,若存在交集,然后再从基于轨迹预测结果计算两车分别到达该冲突区域的时间,计算时间差判断两车是否为潜在冲突对象,若时间差小于预设的阈值,则这两个目标车辆之间存在车辆冲突。Specifically, to determine whether all target vehicles are in conflict, the judgment should be made from the two dimensions of space and time. First, determine whether the dynamic interaction boxes between any two vehicles have an intersection. The intersection is the conflict area in the physical space of the two vehicles. If there is an intersection, then the time it takes for the two vehicles to arrive at the conflict area is calculated based on the trajectory prediction results. The time difference is calculated to determine whether the two vehicles are potential conflict objects. If the time difference is less than the preset threshold, there is a vehicle conflict between the two target vehicles.
在上述实施例的基础上,本公开实施例可以对于动态交互框对车辆冲突进行预测具体可以包括下述步骤:Based on the above embodiments, the embodiments of the present disclosure may predict vehicle conflicts for a dynamic interaction frame and may specifically include the following steps:
a3)确定具有交集区域的两个动态交互框,分别为第一动态交互框和第二动态交互框;其中,第一动态交互框与第一目标车辆对应,第二动态交互框与第二目标车辆对应。a3) determining two dynamic interaction frames having an intersection area, namely a first dynamic interaction frame and a second dynamic interaction frame; wherein the first dynamic interaction frame corresponds to the first target vehicle, and the second dynamic interaction frame corresponds to the second target vehicle.
b3)确定从当前时刻开始第一目标车辆和第二目标车辆分别到达交集区域的第一时长和第二时长。b3) determining a first time duration and a second time duration for the first target vehicle and the second target vehicle to arrive at the intersection area respectively from the current moment.
c3)若第一时长和第二时长的差值小于设定阈值,则第一目标车辆和第二目标车辆存在车辆冲突。c3) If the difference between the first duration and the second duration is less than a set threshold, there is a vehicle conflict between the first target vehicle and the second target vehicle.
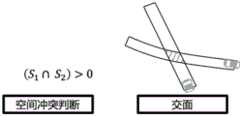
具体的,根据计算的预测结果对目标车辆进行两两判断。如图7所示,Specifically, the target vehicles are judged pairwise based on the calculated prediction results. As shown in FIG7 ,

式中,Ispace为空间上是否存在冲突的判别函数,1代表存在冲突,0代表不存在冲突;S1为第一动态交互框,S2为第二动态交互框。如图7所示,若相交则认为两车在空间上存在冲突,交面就是两车的冲突区域。对于上述空间上存在冲突的车辆对,根据空间识别所得到的每两辆车的交面,分别利用轨迹预测结果计算车辆到达该交面的时刻点,记为第一时长和第二时长。如图8所示,In the formula, Ispace is the discriminant function of whether there is a conflict in space, 1 represents the existence of a conflict, and 0 represents the absence of a conflict; S1 is the first dynamic interaction box, and S2 is the second dynamic interaction box. As shown in Figure 7, if the two vehicles intersect, it is considered that there is a conflict in space, and the intersection is the conflict area of the two vehicles. For the above-mentioned vehicle pairs with conflicting spaces, according to the intersection of each two vehicles obtained by spatial recognition, the trajectory prediction results are used to calculate the time point when the vehicle arrives at the intersection, which is recorded as the first duration and the second duration. As shown in Figure 8,

式中,Itime为时间上是否存在冲突的判别函数,1代表存在冲突,0代表不存在冲突;T1为第一时长,T2为第二时长。如果两车到达时刻点相差小于设定的时间阈值,例如3s,则认为两车在时间上也存在冲突,是潜在冲突对象。Where Itime is the discriminant function of whether there is a conflict in time, 1 represents the existence of a conflict, and 0 represents the absence of a conflict; T1 is the first time length, and T2 is the second time length. If the difference between the arrival time points of the two vehicles is less than the set time threshold, such as 3s, then it is considered that the two vehicles also have a conflict in time and are potential conflict objects.
具体的,首先对车辆每一时刻的动态交互框进行计算,根据计算的预测结果对可能存在冲突的不同行驶方向车辆进行两两判断,判断两车交互框是否相交,若相交则认为两车在空间上存在冲突,相交区域就是两车的冲突区域。根据空间识别所得到的每两辆车的相交区域,分别利用轨迹预测结果计算车辆到达该相交区域的时刻点,如果两车到达时刻点相差小于时间阈值,例如3s,则认为两车在时间上也存在冲突,是潜在冲突对象。Specifically, the dynamic interaction frame of the vehicle at each moment is first calculated, and the vehicles with different driving directions that may conflict are judged pairwise based on the calculated prediction results to determine whether the interaction frames of the two vehicles intersect. If they do, it is considered that the two vehicles conflict in space, and the intersection area is the conflict area of the two vehicles. Based on the intersection area of each two vehicles obtained by spatial recognition, the trajectory prediction results are used to calculate the time point when the vehicle arrives at the intersection area. If the difference between the arrival time points of the two vehicles is less than the time threshold, such as 3s, it is considered that the two vehicles also conflict in time and are potential conflict objects.
在本实施例中,当交叉路口存在不同信号灯设置情况下,可以只对可能的冲突类型进行判断。示例性的,如图6所示,以存在左转专用相位的交叉口为例,其存在的冲突有两类,即直行-右转冲突与左转-右转冲突。In this embodiment, when there are different signal light settings at the intersection, only the possible conflict type can be judged. Exemplarily, as shown in FIG6 , taking the intersection with a left-turn dedicated phase as an example, there are two types of conflicts, namely, straight-on-right-turn conflict and left-turn-right-turn conflict.
在本技术方案中,在交叉路口存在不同信号灯设置情况下,通过只判断可能的冲突类型来达到进一步减少计算量的目的。In this technical solution, when there are different traffic light settings at an intersection, the purpose of further reducing the amount of calculation is achieved by only judging the possible conflict types.
本公开实施例提供了一种道路交叉口的车辆冲突预测方法,该方法包括:获取处于道路交叉口的车辆,作为目标车辆;对所述目标车辆的行驶轨迹进行预测,获得预测行驶轨迹;基于所述预测行驶轨迹实时生成各所述目标车辆的动态交互框;基于所述动态交互框对车辆冲突进行预测。通过轨迹预测方法,将原始长方形框改为基于预测轨迹的曲线框,既能够更好描述车辆行驶时的复杂转向行为,又能够考虑到车辆的预期驾驶行为以提前辨识潜在冲突对象。同时针对道路交叉口的交互情况,从空间和时间预测冲突的辨识方法,该方法减少计算量的同时保证了预测车辆冲突的准确性。The disclosed embodiment provides a method for predicting vehicle conflicts at road intersections, the method comprising: obtaining a vehicle at a road intersection as a target vehicle; predicting the driving trajectory of the target vehicle to obtain a predicted driving trajectory; generating a dynamic interaction frame of each target vehicle in real time based on the predicted driving trajectory; and predicting vehicle conflicts based on the dynamic interaction frame. Through the trajectory prediction method, the original rectangular frame is changed to a curve frame based on the predicted trajectory, which can better describe the complex steering behavior of the vehicle during driving, and can also take into account the expected driving behavior of the vehicle to identify potential conflicting objects in advance. At the same time, in view of the interaction situation at the road intersection, a conflict identification method is used to predict the conflict from space and time. This method reduces the amount of calculation while ensuring the accuracy of predicting vehicle conflicts.
在上述实施例的基础上,本公开实施例可以在基于动态交互框对车辆冲突进行预测之后,具体可以包括下述步骤:On the basis of the above embodiments, the embodiments of the present disclosure may include the following steps after predicting the vehicle conflict based on the dynamic interaction frame:
a4)对于存在风险冲突的目标车辆,获取目标车辆的物理风险信息和心理风险信息。a4) For a target vehicle with risk conflicts, obtain the physical risk information and psychological risk information of the target vehicle.
b4)将物理风险信息和心理风险信息进行融合,获得目标风险信息。b4) Integrate physical risk information and psychological risk information to obtain target risk information.
c4)根据目标风险信息确定目标车辆的风险等级。。c4) Determine the risk level of the target vehicle based on the target risk information.
具体的,人类驾驶员从两个角度感知和评估驾驶风险,即物理风险和心理风险预期(或主观和客观风险),导致每个驾驶员对危险驾驶情况的不同风险感知与风险承受。在物理方面,驾驶员根据潜在风险源的运动学特征捕捉实时驾驶风险。本方案通过一种心理-物理的风险度量框架对冲突场景的危险程度进行度量,首先考虑人类驾驶员对不同方向的异质性注意和感知能力,建立了一个椭圆形状的心理物理风险场;然后对于场中的主要交互对象,从物理风险和心理风险两个角度计算其风险场力值;最后通过计算目标车辆的场力合值得到综合的风险度量值。Specifically, human drivers perceive and evaluate driving risks from two perspectives, namely physical risk and psychological risk expectation (or subjective and objective risk), which leads to different risk perception and risk tolerance of each driver for dangerous driving situations. In terms of physics, drivers capture real-time driving risks based on the kinematic characteristics of potential risk sources. This scheme measures the degree of danger of conflict scenarios through a psycho-physical risk measurement framework. First, considering the heterogeneous attention and perception ability of human drivers in different directions, an elliptical psychophysical risk field is established; then, for the main interactive objects in the field, the risk field force values are calculated from the two perspectives of physical risk and psychological risk; finally, a comprehensive risk measurement value is obtained by calculating the field force value of the target vehicle.
其中,心理-物理风险场从人类驾驶员对不同方向的风险感知能力异质性以及避免发生与后车和前方切入车碰撞的责任安全敏感模型两个方面进行考虑,提出了一种椭圆形状的驾驶人心理-物理风险场模型,其中椭圆线就是等场强线,该场强值就是主车的心理-物理风险场的标准场强。Among them, the psycho-physical risk field considers the heterogeneity of human drivers' risk perception ability in different directions and the responsibility safety sensitivity model for avoiding collisions with the rear vehicle and the front cutting vehicle. An elliptical driver psycho-physical risk field model is proposed, in which the elliptical line is the equal field strength line, and the field strength value is the standard field strength of the main vehicle's psycho-physical risk field.
如图9所示,心理-物理风险场模型是一个双椭圆模型,该模型是以车辆质心为共同中心的半椭圆的组合,该组合被风险场定义轴d=[d1,d2,d3]定义,其中d1为前向长轴,d2为后向长轴,d3为车辆横向方向上的短轴,风险场定义轴由物理风险分量


可选的,获取目标车辆的物理风险信息的方式可以是:获取目标车辆的第一纵向速度、风险车辆的第二纵向速度及风险车辆与目标车辆的相对横向速度;其中,风险车辆为与目标车辆存在风险冲突的车辆;根据第一纵向速度和第二纵向速度确定前向风险分量和后向风险分量;根据相对横向速度及车道宽度确定横向风险分量;前向风险分量、后向风险分量及横向风险分量构成物理风险信息。Optionally, the method of obtaining the physical risk information of the target vehicle may be: obtaining the first longitudinal speed of the target vehicle, the second longitudinal speed of the risk vehicle, and the relative lateral speed between the risk vehicle and the target vehicle; wherein the risk vehicle is a vehicle that has a risk conflict with the target vehicle; determining the forward risk component and the rearward risk component according to the first longitudinal speed and the second longitudinal speed; determining the lateral risk component according to the relative lateral speed and the lane width; the forward risk component, the rearward risk component and the lateral risk component constitute the physical risk information.
具体的,物理运动风险计算,在物理运动学方面可以将风险划分为前向、后向与横向风险三类。





式中,


在横向风险上,考虑到驾驶员一般不需要较大的横向间隙,可以将横向间隙

式中,LW是车道宽度;是指风险源α相对于主车的横向速度,其中正值表示正在接近;γ3、γ4是固定系数,取值为0.5、2。Where LW is the lane width; α refers to the lateral speed of the risk source relative to the main vehicle, where a positive value indicates approaching; γ3 and γ4 are fixed coefficients with values of 0.5 and 2.
可选的,获取目标车辆的心理风险信息的方式可以是:获取目标车辆的驾驶员的驾驶行为预期因素分量、个体特征因子分量及对不同方向风险感知的各向异性特征分量;将驾驶行为预期因素分量、个体特征因子分量及对不同方向风险感知的各向异性特征分量构成心理风险信息。Optionally, the method of obtaining the psychological risk information of the target vehicle may be: obtaining the driving behavior expectation factor component, individual characteristic factor component and anisotropic characteristic component of risk perception in different directions of the driver of the target vehicle; and combining the driving behavior expectation factor component, individual characteristic factor component and anisotropic characteristic component of risk perception in different directions into psychological risk information.
具体的,心理运动风险计算中是不同的驾驶员在面对相同的交通状况时,对当前驾驶风险的感知是不同的,驾驶员的生理因素会影响驾驶员的感知决策。因此,心理风险可以定义为:Specifically, in the calculation of psychomotor risk, different drivers have different perceptions of the current driving risk when facing the same traffic conditions, and the driver's physiological factors will affect the driver's perception and decision-making. Therefore, psychological risk can be defined as:

式中,Pα是驾驶行为预期因素;Ds表示主车驾驶员的个体特征因子;μ是表征驾驶员对不同方向风险感知的各向异性特征向量,取值为[1,0.8,0.5]。Where Pα is the expected factor of driving behavior; Ds represents the individual characteristic factor of the driver; μ is the anisotropic characteristic vector that represents the driver's risk perception in different directions, and its value is [1, 0.8, 0.5].
具体的,当有多个风险源时,此时计算总风险采用叠加风险向量计算。Specifically, when there are multiple risk sources, the total risk is calculated using a superimposed risk vector.
在本技术方案中,通过物理风险信息和心理风险信息确定目标车辆的风险等级,既考虑了人类驾驶员的注意和感知能力,又考虑了车辆物理运动学状态与其他交通参与者的心理预期,能够对交叉口冲突这种二维面域场景中的驾驶风险进行实时评估,对交叉口车辆安全研究具有重要意义。In this technical solution, the risk level of the target vehicle is determined by physical risk information and psychological risk information, which takes into account both the attention and perception capabilities of human drivers and the physical kinematic state of the vehicle and the psychological expectations of other traffic participants. It can perform real-time assessment of driving risks in two-dimensional surface scenarios such as intersection conflicts, which is of great significance to the study of intersection vehicle safety.
实施例二Embodiment 2
图10为本发明实施例还提供了一种道路交叉口的车辆冲突预测装置结构示意图,如图10示,装置包括:目标车辆获取模块210、行驶轨迹预测模块220、交互框生成模块230以及车辆冲突预测模块240。Figure 10 is a schematic diagram of the structure of a vehicle conflict prediction device for a road intersection according to an embodiment of the present invention. As shown in Figure 10, the device includes: a target
目标车辆获取模块210,用于获取处于道路交叉口的车辆,作为目标车辆;The target
行驶轨迹预测模块220,用于对所述目标车辆的行驶轨迹进行预测,获得预测行驶轨迹;A driving
交互框生成模块230,用于基于所述预测行驶轨迹实时生成各所述目标车辆的动态交互框;An interaction
车辆冲突预测模块240,用于基于所述动态交互框对车辆冲突进行预测。The vehicle
本公开实施例所提供的技术方案,利用该方法,通过轨迹预测方法,将原始长方形框改为基于预测轨迹的曲线框,既能够更好描述车辆行驶时的复杂转向行为,又能够考虑到车辆的预期驾驶行为以提前辨识潜在冲突对象。同时针对道路交叉口的交互情况,从空间和时间预测冲突的辨识方法,减少计算量的同时保证了预测车辆冲突的准确性。The technical solution provided by the embodiment of the present disclosure utilizes this method and a trajectory prediction method to change the original rectangular frame into a curved frame based on the predicted trajectory, which can better describe the complex steering behavior of the vehicle while driving, and can also take into account the expected driving behavior of the vehicle to identify potential conflicting objects in advance. At the same time, for the interaction situation at the road intersection, the identification method of predicting the conflict from space and time reduces the amount of calculation while ensuring the accuracy of predicting vehicle conflicts.
进一步地,目标车辆获取模块210可以用于:Furthermore, the target
获取车辆当前时刻的实际轨迹点;Get the actual trajectory point of the vehicle at the current moment;
若所述实际轨迹点处于设定交叉口范围,则所述车辆处于道路交叉口,将所述车辆确定为目标车辆。If the actual trajectory point is within the set intersection range, the vehicle is at a road intersection and the vehicle is determined as a target vehicle.
进一步地,交互框生成模块230可以用于:Furthermore, the interaction
根据所述目标车辆的车宽和行驶方向生成静态交互框,根据所述目标车辆的中心点和所述车宽生成车身区域框;Generate a static interaction frame according to the vehicle width and driving direction of the target vehicle, and generate a body area frame according to the center point of the target vehicle and the vehicle width;
对于当前目标车辆,根据所述当前目标车辆的静态交互框和其他目标车辆的车身区域框确定所述当前目标车辆的跟驰前车;For the current target vehicle, determining the preceding vehicle of the current target vehicle according to the static interaction frame of the current target vehicle and the body area frames of other target vehicles;
根据所述当前目标车辆和所述跟驰前车的行驶数据以及所述预测行驶轨迹生成所述当前目标车辆的动态交互框。A dynamic interaction frame of the current target vehicle is generated according to the driving data of the current target vehicle and the preceding vehicle and the predicted driving trajectory.
进一步地,交互框生成模块230还可以用于:Furthermore, the interaction
将车身区域框与所述静态交互框有交集的其他目标车辆确定为所述当前目标车辆的前车;Determine other target vehicles whose body area frame intersects with the static interaction frame as the preceding vehicle of the current target vehicle;
将与所述当前目标车辆距离最近的前车确定为跟驰前车。The preceding vehicle which is closest to the current target vehicle is determined as the following preceding vehicle.
进一步地,交互框生成模块230还可以用于:Furthermore, the interaction
根据所述行驶数据确定所述当前目标车辆与跟驰前车的安全距离,并获得所述当前目标车辆与跟驰前车的实际距离;Determine the safe distance between the current target vehicle and the following vehicle according to the driving data, and obtain the actual distance between the current target vehicle and the following vehicle;
将所述安全距离和所述实际距离两者中的最小值作为动态交互框的拓展长度,将所述当前目标车辆的车宽作为动态交互框的拓展宽度;The minimum value between the safety distance and the actual distance is used as the extension length of the dynamic interaction frame, and the width of the current target vehicle is used as the extension width of the dynamic interaction frame;
对基于所述预测行驶轨迹采用微元法进行计算,生成所述拓展长度的轨迹曲线;Using a differential element method to calculate the predicted driving trajectory to generate a trajectory curve of the extended length;
根据两条所述轨迹曲线和所述拓展宽度生成动态交互框;其中,所述动态交互框从车头开始向前沿伸。A dynamic interaction frame is generated according to the two trajectory curves and the expansion width; wherein the dynamic interaction frame extends forward from the front of the vehicle.
进一步地,车辆冲突预测模块240可以用于:Furthermore, the vehicle
确定具有交集区域的两个动态交互框,分别为第一动态交互框和第二动态交互框;其中,第一动态交互框与第一目标车辆对应,第二动态交互框与第二目标车辆对应;Determine two dynamic interaction frames having an intersection area, which are a first dynamic interaction frame and a second dynamic interaction frame; wherein the first dynamic interaction frame corresponds to the first target vehicle, and the second dynamic interaction frame corresponds to the second target vehicle;
确定从当前时刻开始所述第一目标车辆和所述第二目标车辆分别到达所述交集区域的第一时长和第二时长;Determine a first duration and a second duration for the first target vehicle and the second target vehicle to arrive at the intersection area respectively from the current moment;
若所述第一时长和所述第二时长的差值小于设定阈值,则所述第一目标车辆和所述第二目标车辆存在车辆冲突。If the difference between the first time length and the second time length is less than a set threshold, there is a vehicle conflict between the first target vehicle and the second target vehicle.
进一步地,本发明实施例还可以在基于所述动态交互框对车辆冲突进行预测之后包括:风险等级确定模块。Furthermore, the embodiment of the present invention may further include: a risk level determination module after predicting the vehicle conflict based on the dynamic interaction frame.
进一步地,风险等级确定模块可以用于:Furthermore, the risk level determination module can be used to:
对于存在风险冲突的目标车辆,获取所述目标车辆的物理风险信息和心理风险信息;For a target vehicle with a risk conflict, obtaining physical risk information and psychological risk information of the target vehicle;
将所述物理风险信息和所述心理风险信息进行融合,获得目标风险信息;The physical risk information and the psychological risk information are integrated to obtain target risk information;
根据所述目标风险信息确定所述目标车辆的风险等级。The risk level of the target vehicle is determined according to the target risk information.
进一步地,风险等级确定模块还可以用于:Furthermore, the risk level determination module can also be used to:
获取所述目标车辆的第一纵向速度、风险车辆的第二纵向速度及所述风险车辆与所述目标车辆的相对横向速度;其中,所述风险车辆为与所述目标车辆存在风险冲突的车辆;Acquire a first longitudinal speed of the target vehicle, a second longitudinal speed of the risk vehicle, and a relative lateral speed between the risk vehicle and the target vehicle; wherein the risk vehicle is a vehicle that has a risk conflict with the target vehicle;
根据所述第一纵向速度和所述第二纵向速度确定前向风险分量和后向风险分量;determining a forward risk component and a backward risk component according to the first longitudinal velocity and the second longitudinal velocity;
根据所述相对横向速度及车道宽度确定横向风险分量;determining a lateral risk component based on the relative lateral speed and lane width;
所述前向风险分量、后向风险分量及所述横向风险分量构成所述物理风险信息。The forward risk component, the backward risk component and the lateral risk component constitute the physical risk information.
进一步地,风险等级确定模块还可以用于:Furthermore, the risk level determination module can also be used to:
获取所述目标车辆的驾驶员的驾驶行为预期因素分量、个体特征因子分量及对不同方向风险感知的各向异性特征分量;Obtaining the driving behavior expectation factor component, the individual characteristic factor component, and the anisotropic characteristic component of the risk perception in different directions of the driver of the target vehicle;
将驾驶行为预期因素分量、个体特征因子分量及对不同方向风险感知的各向异性特征分量构成心理风险信息。The driving behavior expectation factor component, individual characteristic factor component and anisotropic characteristic component of risk perception in different directions constitute psychological risk information.
上述装置可执行本发明前述所有实施例所提供的方法,具备执行上述方法相应的功能模块和有益效果。未在本实施例中详尽描述的技术细节,可参见本发明前述所有实施例所提供的方法。The above device can execute the methods provided by all the above embodiments of the present invention, and has the corresponding functional modules and beneficial effects of executing the above methods. For technical details not described in detail in this embodiment, please refer to the methods provided by all the above embodiments of the present invention.
实施例三Embodiment 3
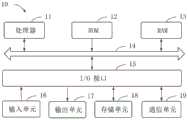
图11出了可以用来实施本发明的实施例的电子设备10的结构示意图。电子设备旨在表示各种形式的数字计算机,诸如,膝上型计算机、台式计算机、工作台、个人数字助理、服务器、刀片式服务器、大型计算机、和其它适合的计算机。电子设备还可以表示各种形式的移动装置,诸如,个人数字处理、蜂窝电话、智能电话、可穿戴设备(如头盔、眼镜、手表等)和其它类似的计算装置。本文所示的部件、它们的连接和关系、以及它们的功能仅仅作为示例,并且不意在限制本文中描述的和/或者要求的本发明的实现。FIG11 shows a schematic diagram of the structure of an
如图11,电子设备10包括至少一个处理器11,以及与至少一个处理器11通信连接的存储器,如只读存储器(ROM)12、随机访问存储器(RAM)13等,其中,存储器存储有可被至少一个处理器执行的计算机程序,处理器11可以根据存储在只读存储器(ROM)12中的计算机程序或者从存储单元18加载到随机访问存储器(RAM)13中的计算机程序,来执行各种适当的动作和处理。在RAM 13中,还可存储电子设备10操作所需的各种程序和数据。处理器11、ROM 12以及RAM 13通过总线14彼此相连。输入/输出(I/O)接口15也连接至总线14。As shown in Figure 11, the
电子设备10中的多个部件连接至I/O接口15,包括:输入单元16,例如键盘、鼠标等;输出单元17,例如各种类型的显示器、扬声器等;存储单元18,例如磁盘、光盘等;以及通信单元19,例如网卡、调制解调器、无线通信收发机等。通信单元19允许电子设备10通过诸如因特网的计算机网络和/或各种电信网络与其他设备交换信息/数据。A number of components in the
处理器11可以是各种具有处理和计算能力的通用和/或专用处理组件。处理器11的一些示例包括但不限于中央处理单元(CPU)、图形处理单元(GPU)、各种专用的人工智能(AI)计算芯片、各种运行机器学习模型算法的处理器、数字信号处理器(DSP)、以及任何适当的处理器、控制器、微控制器等。处理器11执行上文所描述的各个方法和处理,例如道路交叉口的车辆冲突预测方法。The
在一些实施例中,道路交叉口的车辆冲突预测方法可被实现为计算机程序,其被有形地包含于计算机可读存储介质,例如存储单元18。在一些实施例中,计算机程序的部分或者全部可以经由ROM 12和/或通信单元19而被载入和/或安装到电子设备10上。当计算机程序加载到RAM 13并由处理器11执行时,可以执行上文描述的道路交叉口的车辆冲突预测方法的一个或多个步骤。备选地,在其他实施例中,处理器11可以通过其他任何适当的方式(例如,借助于固件)而被配置为执行道路交叉口的车辆冲突预测方法。In some embodiments, the vehicle conflict prediction method at a road intersection may be implemented as a computer program, which is tangibly contained in a computer-readable storage medium, such as a
本文中以上描述的系统和技术的各种实施方式可以在数字电子电路系统、集成电路系统、场可编程门阵列(FPGA)、专用集成电路(ASIC)、专用标准产品(ASSP)、芯片上系统的系统(SOC)、负载可编程逻辑设备(CPLD)、计算机硬件、固件、软件、和/或它们的组合中实现。这些各种实施方式可以包括:实施在一个或者多个计算机程序中,该一个或者多个计算机程序可在包括至少一个可编程处理器的可编程系统上执行和/或解释,该可编程处理器可以是专用或者通用可编程处理器,可以从存储系统、至少一个输入装置、和至少一个输出装置接收数据和指令,并且将数据和指令传输至该存储系统、该至少一个输入装置、和该至少一个输出装置。Various implementations of the systems and techniques described above herein can be implemented in digital electronic circuit systems, integrated circuit systems, field programmable gate arrays (FPGAs), application specific integrated circuits (ASICs), application specific standard products (ASSPs), systems on chips (SOCs), load programmable logic devices (CPLDs), computer hardware, firmware, software, and/or combinations thereof. These various implementations may include: being implemented in one or more computer programs that can be executed and/or interpreted on a programmable system including at least one programmable processor, which can be a special purpose or general purpose programmable processor that can receive data and instructions from a storage system, at least one input device, and at least one output device, and transmit data and instructions to the storage system, the at least one input device, and the at least one output device.
用于实施本发明的方法的计算机程序可以采用一个或多个编程语言的任何组合来编写。这些计算机程序可以提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器,使得计算机程序当由处理器执行时使流程图和/或框图中所规定的功能/操作被实施。计算机程序可以完全在机器上执行、部分地在机器上执行,作为独立软件包部分地在机器上执行且部分地在远程机器上执行或完全在远程机器或服务器上执行。Computer programs for implementing the methods of the present invention may be written in any combination of one or more programming languages. These computer programs may be provided to a processor of a general-purpose computer, a special-purpose computer, or other programmable data processing device, so that when the computer program is executed by the processor, the functions/operations specified in the flow chart and/or block diagram are implemented. The computer program may be executed entirely on the machine, partially on the machine, partially on the machine and partially on a remote machine as a stand-alone software package, or entirely on a remote machine or server.
在本发明的上下文中,计算机可读存储介质可以是有形的介质,其可以包含或存储以供指令执行系统、装置或设备使用或与指令执行系统、装置或设备结合地使用的计算机程序。计算机可读存储介质可以包括但不限于电子的、磁性的、光学的、电磁的、红外的、或半导体系统、装置或设备,或者上述内容的任何合适组合。备选地,计算机可读存储介质可以是机器可读信号介质。机器可读存储介质的更具体示例会包括基于一个或多个线的电气连接、便携式计算机盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦除可编程只读存储器(EPROM或快闪存储器)、光纤、便捷式紧凑盘只读存储器(CD-ROM)、光学储存设备、磁储存设备、或上述内容的任何合适组合。In the context of the present invention, a computer-readable storage medium may be a tangible medium that may contain or store a computer program for use by or in conjunction with an instruction execution system, device, or equipment. A computer-readable storage medium may include, but is not limited to, electronic, magnetic, optical, electromagnetic, infrared, or semiconductor systems, devices, or equipment, or any suitable combination of the foregoing. Alternatively, a computer-readable storage medium may be a machine-readable signal medium. A more specific example of a machine-readable storage medium may include an electrical connection based on one or more lines, a portable computer disk, a hard disk, a random access memory (RAM), a read-only memory (ROM), an erasable programmable read-only memory (EPROM or flash memory), an optical fiber, a portable compact disk read-only memory (CD-ROM), an optical storage device, a magnetic storage device, or any suitable combination of the foregoing.
为了提供与用户的交互,可以在电子设备上实施此处描述的系统和技术,该电子设备具有:用于向用户显示信息的显示装置(例如,CRT(阴极射线管)或者LCD(液晶显示器)监视器);以及键盘和指向装置(例如,鼠标或者轨迹球),用户可以通过该键盘和该指向装置来将输入提供给电子设备。其它种类的装置还可以用于提供与用户的交互;例如,提供给用户的反馈可以是任何形式的传感反馈(例如,视觉反馈、听觉反馈、或者触觉反馈);并且可以用任何形式(包括声输入、语音输入或者、触觉输入)来接收来自用户的输入。To provide interaction with a user, the systems and techniques described herein may be implemented on an electronic device having: a display device (e.g., a CRT (cathode ray tube) or LCD (liquid crystal display) monitor) for displaying information to the user; and a keyboard and a pointing device (e.g., a mouse or trackball) through which the user can provide input to the electronic device. Other types of devices may also be used to provide interaction with the user; for example, the feedback provided to the user may be any form of sensory feedback (e.g., visual feedback, auditory feedback, or tactile feedback); and input from the user may be received in any form (including acoustic input, voice input, or tactile input).
可以将此处描述的系统和技术实施在包括后台部件的计算系统(例如,作为数据服务器)、或者包括中间件部件的计算系统(例如,应用服务器)、或者包括前端部件的计算系统(例如,具有图形用户界面或者网络浏览器的用户计算机,用户可以通过该图形用户界面或者该网络浏览器来与此处描述的系统和技术的实施方式交互)、或者包括这种后台部件、中间件部件、或者前端部件的任何组合的计算系统中。可以通过任何形式或者介质的数字数据通信(例如,通信网络)来将系统的部件相互连接。通信网络的示例包括:局域网(LAN)、广域网(WAN)、区块链网络和互联网。The systems and techniques described herein may be implemented in a computing system that includes backend components (e.g., as a data server), or a computing system that includes middleware components (e.g., an application server), or a computing system that includes frontend components (e.g., a user computer with a graphical user interface or a web browser through which a user can interact with implementations of the systems and techniques described herein), or a computing system that includes any combination of such backend components, middleware components, or frontend components. The components of the system may be interconnected by any form or medium of digital data communication (e.g., a communication network). Examples of communication networks include: a local area network (LAN), a wide area network (WAN), a blockchain network, and the Internet.
计算系统可以包括客户端和服务器。客户端和服务器一般远离彼此并且通常通过通信网络进行交互。通过在相应的计算机上运行并且彼此具有客户端-服务器关系的计算机程序来产生客户端和服务器的关系。服务器可以是云服务器,又称为云计算服务器或云主机,是云计算服务体系中的一项主机产品,以解决了传统物理主机与VPS服务中,存在的管理难度大,业务扩展性弱的缺陷。A computing system may include a client and a server. The client and the server are generally remote from each other and usually interact through a communication network. The client and server relationship is generated by computer programs running on the corresponding computers and having a client-server relationship with each other. The server may be a cloud server, also known as a cloud computing server or cloud host, which is a host product in the cloud computing service system to solve the defects of difficult management and weak business scalability in traditional physical hosts and VPS services.
应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本发明中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本发明的技术方案所期望的结果,本文在此不进行限制。It should be understood that the various forms of processes shown above can be used to reorder, add or delete steps. For example, the steps described in the present invention can be executed in parallel, sequentially or in different orders, as long as the desired results of the technical solution of the present invention can be achieved, and this document does not limit this.
上述具体实施方式,并不构成对本发明保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明保护范围之内。The above specific implementations do not constitute a limitation on the protection scope of the present invention. It should be understood by those skilled in the art that various modifications, combinations, sub-combinations and substitutions can be made according to design requirements and other factors. Any modification, equivalent substitution and improvement made within the spirit and principle of the present invention should be included in the protection scope of the present invention.
Claims (12)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211644357.4ACN115862334B (en) | 2022-12-20 | 2022-12-20 | Vehicle conflict prediction method, device and equipment for road intersection and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211644357.4ACN115862334B (en) | 2022-12-20 | 2022-12-20 | Vehicle conflict prediction method, device and equipment for road intersection and storage medium |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115862334Atrue CN115862334A (en) | 2023-03-28 |
| CN115862334B CN115862334B (en) | 2025-07-29 |
Family
ID=85674703
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211644357.4AActiveCN115862334B (en) | 2022-12-20 | 2022-12-20 | Vehicle conflict prediction method, device and equipment for road intersection and storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115862334B (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116704816A (en)* | 2023-08-08 | 2023-09-05 | 江苏科运智慧交通科技有限公司 | Road intersection safety early warning method based on conflict domain |
| CN118781797A (en)* | 2024-06-27 | 2024-10-15 | 武汉理工大学 | Method for forming continuous flow of straight vehicles at a cross intersection with a right-turn lane |
| CN120293167A (en)* | 2025-04-03 | 2025-07-11 | 酷睿程(北京)科技有限公司 | Trajectory planning method, device and storage medium |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105035082A (en)* | 2014-04-24 | 2015-11-11 | 本田技研工业株式会社 | Collision avoidance assist apparatus, collision avoidance assist method, and program |
| CN108447308A (en)* | 2018-05-17 | 2018-08-24 | 中交信息技术国家工程实验室有限公司 | A kind of intersection vehicles risk of collision prediction technique and system based on bus or train route collaboration |
| CN111599179A (en)* | 2020-05-21 | 2020-08-28 | 北京航空航天大学 | A motion planning method for autonomous driving at unsignaled intersections based on risk dynamic balance |
| CN112026762A (en)* | 2020-09-15 | 2020-12-04 | 北京经纬恒润科技有限公司 | Vehicle collision analysis method and device |
| CN113470430A (en)* | 2021-06-22 | 2021-10-01 | 南京航空航天大学 | Early warning method for vehicle collision at non-signalized intersection based on steering intention prediction |
| CN113593241A (en)* | 2021-09-28 | 2021-11-02 | 禾多科技(北京)有限公司 | Vehicle interaction information verification method and device, electronic equipment and readable medium |
| CN114179832A (en)* | 2021-12-29 | 2022-03-15 | 阿波罗智联(北京)科技有限公司 | Lane changing method for autonomous vehicle |
| CN115081822A (en)* | 2022-05-30 | 2022-09-20 | 同济大学 | Driving risk assessment method and system based on psychological and physical risk field |
| CN115168810A (en)* | 2022-09-08 | 2022-10-11 | 南京慧尔视智能科技有限公司 | Traffic data generation method and device, electronic equipment and storage medium |
- 2022
- 2022-12-20CNCN202211644357.4Apatent/CN115862334B/enactiveActive
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105035082A (en)* | 2014-04-24 | 2015-11-11 | 本田技研工业株式会社 | Collision avoidance assist apparatus, collision avoidance assist method, and program |
| CN108447308A (en)* | 2018-05-17 | 2018-08-24 | 中交信息技术国家工程实验室有限公司 | A kind of intersection vehicles risk of collision prediction technique and system based on bus or train route collaboration |
| CN111599179A (en)* | 2020-05-21 | 2020-08-28 | 北京航空航天大学 | A motion planning method for autonomous driving at unsignaled intersections based on risk dynamic balance |
| CN112026762A (en)* | 2020-09-15 | 2020-12-04 | 北京经纬恒润科技有限公司 | Vehicle collision analysis method and device |
| CN113470430A (en)* | 2021-06-22 | 2021-10-01 | 南京航空航天大学 | Early warning method for vehicle collision at non-signalized intersection based on steering intention prediction |
| CN113593241A (en)* | 2021-09-28 | 2021-11-02 | 禾多科技(北京)有限公司 | Vehicle interaction information verification method and device, electronic equipment and readable medium |
| CN114179832A (en)* | 2021-12-29 | 2022-03-15 | 阿波罗智联(北京)科技有限公司 | Lane changing method for autonomous vehicle |
| CN115081822A (en)* | 2022-05-30 | 2022-09-20 | 同济大学 | Driving risk assessment method and system based on psychological and physical risk field |
| CN115168810A (en)* | 2022-09-08 | 2022-10-11 | 南京慧尔视智能科技有限公司 | Traffic data generation method and device, electronic equipment and storage medium |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116704816A (en)* | 2023-08-08 | 2023-09-05 | 江苏科运智慧交通科技有限公司 | Road intersection safety early warning method based on conflict domain |
| CN116704816B (en)* | 2023-08-08 | 2023-10-31 | 江苏科运智慧交通科技有限公司 | Road intersection safety early warning method based on conflict domain |
| CN118781797A (en)* | 2024-06-27 | 2024-10-15 | 武汉理工大学 | Method for forming continuous flow of straight vehicles at a cross intersection with a right-turn lane |
| CN118781797B (en)* | 2024-06-27 | 2025-06-27 | 武汉理工大学 | Continuous flow forming method for cross intersection straight-going vehicle with right-turning special lane |
| CN120293167A (en)* | 2025-04-03 | 2025-07-11 | 酷睿程(北京)科技有限公司 | Trajectory planning method, device and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115862334B (en) | 2025-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12024166B2 (en) | Vehicle driving control method and apparatus | |
| CN115862334A (en) | Vehicle Conflict Prediction Method, Device, Equipment and Storage Medium at Road Intersection | |
| EP3955230B1 (en) | Vehicle control method, vehicle-road coordination system, roadside device and automatic driving vehicle | |
| CN112650243B (en) | Vehicle control methods, devices, electronic equipment and autonomous vehicles | |
| JP2021113051A (en) | Vehicle control methods, devices, vehicles, electronic devices and storage media | |
| CN113165670A (en) | Intelligent driving method, device, storage medium and computer program | |
| JP2017130198A (en) | Apparatus and method for providing extended forward collision warning | |
| KR102836025B1 (en) | Vehicle control method, device, apparatus and computer recording medium | |
| CN117842031A (en) | Lane changing method, device, vehicle and storage medium | |
| CN114802251A (en) | Control method and device for automatic driving vehicle, electronic device and storage medium | |
| CN117842097A (en) | Vehicle control method, device, equipment and storage medium based on automatic driving | |
| CN114852068B (en) | Pedestrian collision avoidance method, device, equipment and storage medium | |
| CN116252817A (en) | Automatic driving lane change decision method, device, equipment and storage medium | |
| CN118545044A (en) | Vehicle control method, device, equipment and storage medium based on event camera | |
| CN117636307A (en) | Object detection method and device based on semantic information and automatic driving vehicle | |
| CN115092182B (en) | Vehicle intention prediction method, system, electronic equipment and medium | |
| CN116513172A (en) | Vehicle collision risk determination method, device, equipment and storage medium | |
| CN116442996A (en) | A vehicle lane change control method, device, equipment and storage medium | |
| WO2024065951A1 (en) | Narrow road vehicle encounter method and apparatus, device, and storage medium | |
| CN115993254A (en) | Method, device, equipment and storage medium for determining avoidance time | |
| CN118323181A (en) | Vehicle control method, device, controller and storage medium | |
| CN115771460B (en) | Display method and device for lane change information of vehicle, electronic equipment and storage medium | |
| CN118760155A (en) | Multi-vehicle platoon planning method, equipment, medium and product based on cloud control platform | |
| CN116013108A (en) | V2X-based vehicle trajectory prediction method, device, equipment and self-driving vehicle | |
| CN118038690A (en) | Ramp vehicle converging guiding method, electronic equipment and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |