CN115855104A - Optimal online evaluation method for combined navigation filtering result - Google Patents
Optimal online evaluation method for combined navigation filtering resultDownload PDFInfo
- Publication number
- CN115855104A CN115855104ACN202211494167.9ACN202211494167ACN115855104ACN 115855104 ACN115855104 ACN 115855104ACN 202211494167 ACN202211494167 ACN 202211494167ACN 115855104 ACN115855104 ACN 115855104A
- Authority
- CN
- China
- Prior art keywords
- error
- equation
- carrier
- attitude
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001914filtrationMethods0.000titleclaimsabstractdescription87
- 238000011156evaluationMethods0.000titleclaimsabstractdescription34
- 238000004422calculation algorithmMethods0.000claimsabstractdescription42
- 230000009467reductionEffects0.000claimsabstractdescription40
- 230000002068genetic effectEffects0.000claimsabstractdescription22
- 238000010606normalizationMethods0.000claimsabstractdescription9
- 238000012545processingMethods0.000claimsabstractdescription8
- 238000000034methodMethods0.000claimsdescription50
- 238000005259measurementMethods0.000claimsdescription15
- 230000001133accelerationEffects0.000claimsdescription12
- 238000004364calculation methodMethods0.000claimsdescription11
- 230000005484gravityEffects0.000claimsdescription6
- 238000005070samplingMethods0.000claimsdescription4
- 239000011159matrix materialSubstances0.000description29
- 238000010586diagramMethods0.000description12
- 230000008569processEffects0.000description11
- 230000003044adaptive effectEffects0.000description8
- 230000004927fusionEffects0.000description7
- 238000004458analytical methodMethods0.000description6
- 230000007423decreaseEffects0.000description6
- 230000008859changeEffects0.000description5
- 238000005457optimizationMethods0.000description5
- 238000004088simulationMethods0.000description5
- 238000013461designMethods0.000description4
- 230000000694effectsEffects0.000description4
- 238000005516engineering processMethods0.000description4
- 238000006073displacement reactionMethods0.000description3
- 238000013441quality evaluationMethods0.000description3
- 238000012360testing methodMethods0.000description3
- 210000000349chromosomeAnatomy0.000description2
- 238000009795derivationMethods0.000description2
- 230000006872improvementEffects0.000description2
- 230000007246mechanismEffects0.000description2
- 230000004044responseEffects0.000description2
- 101001121408Homo sapiens L-amino-acid oxidaseProteins0.000description1
- 101000827703Homo sapiens Polyphosphoinositide phosphataseProteins0.000description1
- 102100026388L-amino-acid oxidaseHuman genes0.000description1
- 102100023591Polyphosphoinositide phosphataseHuman genes0.000description1
- 101100012902Saccharomyces cerevisiae (strain ATCC 204508 / S288c) FIG2 geneProteins0.000description1
- 101100233916Saccharomyces cerevisiae (strain ATCC 204508 / S288c) KAR5 geneProteins0.000description1
- 238000007792additionMethods0.000description1
- 230000009286beneficial effectEffects0.000description1
- 238000006243chemical reactionMethods0.000description1
- 238000007405data analysisMethods0.000description1
- 238000011161developmentMethods0.000description1
- 239000006185dispersionSubstances0.000description1
- 230000005284excitationEffects0.000description1
- 238000002474experimental methodMethods0.000description1
- 230000010354integrationEffects0.000description1
- 238000013507mappingMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 230000035772mutationEffects0.000description1
- 239000002245particleSubstances0.000description1
- 108090000623proteins and genesProteins0.000description1
- 238000001303quality assessment methodMethods0.000description1
- 238000011160researchMethods0.000description1
- 230000035945sensitivityEffects0.000description1
- 238000012546transferMethods0.000description1
Images










Landscapes
- Navigation (AREA)
Abstract
Description
Translated fromChinese技术领域Technical Field
本申请涉及滤波方式性能评估领域,具体涉及一种组合导航滤波结果最优在线评价方法。The present application relates to the field of filtering performance evaluation, and in particular to an optimal online evaluation method for combined navigation filtering results.
背景技术Background Art
随着对导航定位要求的不断提高和我国的运输工业的迅速发展,导航所需的精度要求不断提高。惯性导航具有良好的瞬时性、短期精度和稳定性,但其精度会随其使用时间增多而增大。常规卡尔曼滤波、无极采样卡尔曼滤波、自适应滤波、粒子滤波等方法是现有的滤波方法。上述方法均有其自身的优势以及应用范围。常规评价法以线性结合方式计算出评价结果,并运用专家评分和AHP两种评价方法来决定各项评价的权重。然而,此法具有高度主观性,且有较大的不确定因素,无法从科学的角度得出最优滤波质量。With the continuous improvement of navigation and positioning requirements and the rapid development of my country's transportation industry, the accuracy requirements for navigation are constantly increasing. Inertial navigation has good instantaneity, short-term accuracy and stability, but its accuracy will increase with the increase of its use time. Conventional Kalman filtering, infinite sampling Kalman filtering, adaptive filtering, particle filtering and other methods are existing filtering methods. The above methods all have their own advantages and application scope. The conventional evaluation method calculates the evaluation results in a linear combination manner, and uses expert scoring and AHP two evaluation methods to determine the weight of each evaluation. However, this method is highly subjective and has large uncertainties, and it is impossible to obtain the optimal filtering quality from a scientific perspective.
发明内容Summary of the invention
本申请从滤波过程的角度评价组合滤波质量,使用成熟的数学理论体系作技术支撑,减少主观性,不确定因素的干扰;提供一种科学的滤波质量评价方法,提高评价滤波质量的客观度以及精准度;将信息融合技术应用于组合导航滤波器的质量评价,构建一套信息融合技术评价指标。This application evaluates the quality of combined filtering from the perspective of the filtering process, uses a mature mathematical theoretical system as technical support, reduces subjectivity, and interference from uncertain factors; provides a scientific filtering quality evaluation method to improve the objectivity and accuracy of evaluating filtering quality; applies information fusion technology to the quality evaluation of combined navigation filters, and constructs a set of information fusion technology evaluation indicators.
为实现上述目的,本申请提供了一种组合导航滤波结果最优在线评价的方法,步骤包括:To achieve the above objectives, the present application provides a method for optimal online evaluation of combined navigation filtering results, the steps comprising:
获取载体坐标系相对于地心惯性坐标系的状态数据;Obtaining state data of the carrier coordinate system relative to the geocentric inertial coordinate system;
根据所述状态数据确立初始姿态四元数方程;Establishing an initial attitude quaternion equation according to the state data;
对所述初始姿态四元数方程进行规范化处理,得到姿态更新方程;Normalizing the initial attitude quaternion equation to obtain an attitude update equation;
根据所述状态数据得到载体位置更新方程,基于所述载体位置更新方程和所述状态数据,得到载体速度更新方程;Obtaining a carrier position update equation according to the state data, and obtaining a carrier velocity update equation based on the carrier position update equation and the state data;
根据所述姿态更新方程和所述载体速度更新方程,得到姿态误差方程和速度与位置误差模型;According to the attitude update equation and the carrier velocity update equation, an attitude error equation and a velocity and position error model are obtained;
根据所述姿态误差模型和所述速度与位置误差模型,对系统驱动白噪声进行等效离散化处理,得到离散卡尔曼滤波递推模型;According to the attitude error model and the speed and position error model, the system driving white noise is equivalently discretized to obtain a discrete Kalman filter recursive model;
基于所述离散卡尔曼滤波递推模型得到滤波结果,并对所述滤波结果进行归一化处理,结合加速遗传算法优化降维指标函数,最终得出最佳降维值。A filtering result is obtained based on the discrete Kalman filter recursive model, and the filtering result is normalized, and the dimension reduction index function is optimized in combination with an accelerated genetic algorithm to finally obtain an optimal dimension reduction value.
优选的,所述状态数据包括:载体的惯性数据和误差数据;所述惯性数据包括:载体速度数据、载体位置数据和载体姿态数据;所述误差数据包括:姿态误差数据、速度误差数据和位置误差数据。Preferably, the state data includes: inertial data and error data of the carrier; the inertial data includes: carrier speed data, carrier position data and carrier attitude data; the error data includes: attitude error data, speed error data and position error data.
优选的,在每次更新后,对所述姿态更新方程进行规范化处理,利用四元数对所述载体姿态数据进行修正更新,将所述四元数转换成方向余弦矩阵来进行比力的投影,通过使用更新后的所述四元数来计算欧拉角。Preferably, after each update, the attitude update equation is normalized, the carrier attitude data is corrected and updated using quaternions, the quaternions are converted into direction cosine matrices for force projection, and the Euler angles are calculated using the updated quaternions.
优选的,在所述载体位置更新方程中,通过将加速度计测量得到的速度增量投影到发射惯性系下,得到发射惯性系下的速度的增量。Preferably, in the carrier position update equation, the velocity increment in the launching inertial system is obtained by projecting the velocity increment measured by the accelerometer into the launching inertial system.
优选的,在所述载体速度更新方程中,为了减小邻近的离散时刻的采样错误,载体的引力加速度采用上一时刻与当前时刻的引力加速度的平均;将当前时刻更新的位置信息以及引力信息运用到速度解算中。Preferably, in the carrier velocity update equation, in order to reduce the sampling error of adjacent discrete moments, the gravitational acceleration of the carrier adopts the average of the gravitational acceleration of the previous moment and the current moment; the position information and gravitational information updated at the current moment are applied to the velocity solution.
优选的,对于所述姿态误差方程,包含本身的姿态误差以及用陀螺仪测量得到的角速度和真实角速度之间的误差,对姿态角误差做近似处理,结合陀螺误差模型得出所述载体姿态误差方程。Preferably, the attitude error equation includes the attitude error itself and the error between the angular velocity measured by the gyroscope and the true angular velocity. The attitude angular error is approximated and the carrier attitude error equation is obtained in combination with the gyroscope error model.
优选的,所述载体位置与速度误差方程的计算包括:忽略引力误差并利用加速度计的测量误差得到所述载体位置与速度误差方程。Preferably, the calculation of the carrier position and velocity error equation includes: ignoring the gravity error and using the measurement error of the accelerometer to obtain the carrier position and velocity error equation.
优选的,得到所述最佳降维值的方法包括:采用最大最小规范化法来进行归一化处理,并将多维数据综合为一维降维值,进而结合采用实数进行编码的加速遗传算法,得到所述最佳降维值。Preferably, the method for obtaining the optimal dimensionality reduction value includes: using the maximum-minimum normalization method to perform normalization processing, and integrating multidimensional data into a one-dimensional dimensionality reduction value, and then combining an accelerated genetic algorithm using real numbers for encoding to obtain the optimal dimensionality reduction value.
与现有技术相比,本申请的有益效果如下:Compared with the prior art, the beneficial effects of this application are as follows:
本申请科学地建立了组合导航滤波质量评价体系,有效的避免了以往评价中的主观性,不确定因素的。利用加权降维技术结合加速遗传算法,快速精准地得出了最佳降维值,进而能够客观得出最优滤波质量。This application scientifically establishes a combined navigation filter quality evaluation system, effectively avoiding the subjectivity and uncertainty in previous evaluations. By using weighted dimensionality reduction technology combined with an accelerated genetic algorithm, the optimal dimensionality reduction value is quickly and accurately obtained, and the optimal filter quality can be objectively obtained.
附图说明BRIEF DESCRIPTION OF THE DRAWINGS
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。In order to more clearly illustrate the embodiments of the present invention or the technical solutions in the prior art, the drawings required for use in the embodiments will be briefly introduced below. Obviously, the drawings described below are only some embodiments of the present invention. For ordinary technicians in this field, other drawings can be obtained based on these drawings without paying creative labor.
图1为本申请实施例一的方法流程示意图;FIG1 is a schematic diagram of a method flow chart of
图2为本申请实施例一中当P01=P0时滤波后的速度误差示意图;FIG2 is a schematic diagram of the velocity error after filtering when P01 =P0 in the first embodiment of the present application;
图3为本申请实施例一中当P02=0.05P0时滤波后的速度误差示意图;FIG3 is a schematic diagram of the velocity error after filtering when P02 =0.05P0 in the first embodiment of the present application;
图4为本申请实施例一中当P03=25P0时滤波后的速度误差示意图;FIG4 is a schematic diagram of the speed error after filtering when P03 =25P0 in the first embodiment of the present application;
图5为本申请实施例一中当P01=P0时滤波后的位置误差示意图;FIG5 is a schematic diagram of position error after filtering when P01 =P0 in the first embodiment of the present application;
图6为本申请实施例一中当P02=0.05P0时滤波后的位置误差示意图;FIG6 is a schematic diagram of position error after filtering when P02 =0.05P0 in the first embodiment of the present application;
图7为本申请实施例一中当P03=25P0时滤波后的位置误差示意图;FIG7 is a schematic diagram of position error after filtering when P03 =25P0 in the first embodiment of the present application;
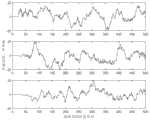
图8为本申请实施例二中飞行器多种运动状态匀速及匀加速飞行的水平姿态角示意图;FIG8 is a schematic diagram of the horizontal attitude angles of the aircraft in various motion states of uniform speed and uniform acceleration flight in the second embodiment of the present application;
图9为本申请实施例二中飞行器多种运动状态匀速及匀加速飞行的航向角示意图;FIG9 is a schematic diagram of the heading angles of the aircraft in various motion states of uniform speed and uniform acceleration flight in the second embodiment of the present application;
图10为本申请实施例二中飞行器多种运动状态匀速及匀加速飞行的运动轨迹示意图FIG. 10 is a schematic diagram of the motion trajectory of the aircraft in various motion states of uniform speed and uniform acceleration flight in the second embodiment of the present application.
图11为本申请实施例二中滤波方法品质评估算法仿真结果示意图。FIG. 11 is a schematic diagram of simulation results of a quality assessment algorithm for a filtering method in
具体实施方式DETAILED DESCRIPTION
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。The following will be combined with the drawings in the embodiments of the present application to clearly and completely describe the technical solutions in the embodiments of the present application. Obviously, the described embodiments are only part of the embodiments of the present application, not all of the embodiments. Based on the embodiments in the present application, all other embodiments obtained by ordinary technicians in this field without creative work are within the scope of protection of this application.
为使本申请的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本申请作进一步详细的说明。In order to make the above-mentioned objects, features and advantages of the present application more obvious and easy to understand, the present application is further described in detail below in conjunction with the accompanying drawings and specific implementation methods.
如图1所示,为本申请实施例一的方法流程示意图,步骤包括:获取载体坐标系相对于地心惯性坐标系的状态数据;根据状态数据确立初始姿态四元数方程;对初始姿态四元数方程进行规范化处理,得到姿态更新方程;根据状态数据得到载体位置更新方程,基于载体位置更新方程和状态数据,得到载体速度更新方程;根据姿态更新方程和载体速度更新方程,得到姿态误差方程和速度与位置误差模型;根据姿态误差模型和速度与位置误差模型,对系统驱动白噪声进行等效离散化处理,得到离散卡尔曼滤波递推模型;基于离散卡尔曼滤波递推模型得到滤波结果,并对滤波结果进行归一化处理,结合加速遗传算法优化降维指标函数,最终得出最佳降维值。As shown in Figure 1, it is a schematic diagram of the method flow of Example 1 of the present application, and the steps include: obtaining state data of the carrier coordinate system relative to the geocentric inertial coordinate system; establishing an initial attitude quaternion equation based on the state data; normalizing the initial attitude quaternion equation to obtain an attitude update equation; obtaining a carrier position update equation based on the state data, and obtaining a carrier velocity update equation based on the carrier position update equation and the state data; obtaining an attitude error equation and a velocity and position error model based on the attitude update equation and the carrier velocity update equation; performing equivalent discretization processing on the system driving white noise based on the attitude error model and the velocity and position error model to obtain a discrete Kalman filter recursive model; obtaining a filtering result based on the discrete Kalman filter recursive model, normalizing the filtering result, and optimizing the dimensionality reduction index function in combination with an accelerated genetic algorithm to finally obtain the optimal dimensionality reduction value.
上述的状态数据包括:载体的惯性数据和误差数据。其中,惯性数据包括:载体速度数据、载体位置数据和载体姿态数据;误差数据包括:姿态误差数据、速度误差数据和位置误差数据。The above-mentioned state data includes: inertial data and error data of the carrier. Among them, the inertial data includes: carrier speed data, carrier position data and carrier attitude data; the error data includes: attitude error data, speed error data and position error data.
在本实施例中,首先,建立组合导航解算模型。In this embodiment, firstly, a combined navigation solution model is established.
第一步,建立姿态更新解算方程。为了建立组合导航解算模型,我们定义载体坐标系b系相对于地心惯性坐标系i系的转动角度是载体的姿态。其中,设俯仰角








通过推导可得四元数的离散化更新公式:The discretization update formula of quaternion can be obtained by deduction:

其中,
需要说明的是,在本实施例中,qn是单位四元数才能满足姿态更新。但因为计算是存在误差的,导致更新计算后的qn不再是一个单位四元数。因此为了解决这个问题,在每次更新后,都应该对其进行规范化处理:It should be noted that in this embodiment, qn must be a unit quaternion to satisfy the attitude update. However, due to the calculation error, the updated qn is no longer a unit quaternion. Therefore, in order to solve this problem, it should be normalized after each update:

利用四元数进行姿态的修正更新后,需要将四元数转换成方向余弦矩阵来进行比力的投影。两者的转换关系在公式(7)中有所体现。通过使用更新后的四元数来计算欧拉角的方法为:After the quaternion is used to correct the attitude, it is necessary to convert the quaternion into a direction cosine matrix for force projection. The conversion relationship between the two is reflected in formula (7). The method of calculating the Euler angle using the updated quaternion is:

第二步,建立位置更新结算方程。在发射惯性系下,ΔWi代表当前时刻速度的增量。

其方法包括:The methods include:


第三步,建立速度更新结算方程。式(13)中,为了减小邻近的离散时刻的采样错误,载体的引力加速度采用上一时刻与当前时刻的引力加速度的平均。地球引力场场强矢量表示为F=gradU。引力位用U来表示。在公式(14)中,地心纬度由φ表示。地球的赤道平均半径由ae来表示。地球的质量由m来表示。载体的地心矢径大小由r来表示。地球的引力常数由f来表示。





A=[cos(A0)cos(B),sin(B),-sin(A0)cos(B)]T(17)A=[cos(A0 )cos(B),sin(B),-sin(A0 )cos(B)]T (17)
其中A是单位向量。where A is a unit vector.
计算可得:The calculation can be obtained:

其中,
之后,建立SINS/GNSS组合导航卡尔曼滤波模型。Afterwards, the SINS/GNSS integrated navigation Kalman filter model is established.
第一步,首先利用四元数进行姿态误差解算。含有误差的量用


其方法包括:The methods include:





其中,角速度是陀螺仪测量得出的。但是测量出的角速度与真实的角速度之间存在着误差。二者之间的误差可以由


设姿态角误差为σ,σ表示其大小,则有:Assume that the attitude angle error is σ, where σ represents its magnitude, then:

由于姿态角误差较小,所以对其做近似处理,将式(25)近似写成



第二步,进行速度与位置误差解算。含有误差的量用


其方法包括:忽略引力误差并利用加速度计的测量误差得到所述载体位置与速度误差方程;结合式(13),用导数的形式来描述前后两个时刻的速度变化为:The method includes: ignoring the gravity error and using the measurement error of the accelerometer to obtain the carrier position and velocity error equation; combining equation (13), using the derivative form to describe the velocity change between the previous and next moments:

由于加速度计的测量是含有误差的,同时忽略引力误差,有:Since the measurement of the accelerometer contains errors, and the gravity error is ignored, we have:

以上两式作差:The difference between the above two formulas is:

其中,表示实际含有误差的方向余弦阵,有



因为通过惯性导航解算得到的载体位移,是由于对速度进行积分得到的。在积分运算过程中,一定会产生位移误差,有:Because the carrier displacement obtained by inertial navigation is obtained by integrating the velocity. During the integration operation, displacement errors will definitely occur, as follows:

第三步,基于速度与位置观测得到的SINS/GNSS组合滤波模型。The third step is to obtain the SINS/GNSS combined filtering model based on velocity and position observations.
其公式包括是:将式(13)、式(30)和式(31)结合。其中观测值Z(t)由SINS与GNSS的速度差和位置差来表示。状态向量X(t)由位置误差、速度误差、姿态角误差、陀螺零偏误差以及加速度计零偏误差来表示。观测噪声为V(t),系统噪声为W(t)。基于此,构建出SINS/GNSS组合导航滤波模型为:The formula includes: Combining equation (13), equation (30) and equation (31). The observation value Z(t) is represented by the speed difference and position difference between SINS and GNSS. The state vector X(t) is represented by the position error, speed error, attitude angle error, gyro bias error and accelerometer bias error. The observation noise is V(t) and the system noise is W(t). Based on this, the SINS/GNSS integrated navigation filter model is constructed as:

Z(t)=H(t)X(t)+V(t) (33)Z(t)=H(t)X(t)+V(t) (33)
其中:in:
X(t)=[δvx,δvy,δvz,δrx,δry,δrz,δφx,δφy,δφz,δK0x,δK0y,δK0z,δD0x,δD0y,δD0z]T (34)X(t)=[δvx ,δvy ,δvz ,δrx ,δry ,δrz ,δφx ,δφy ,δφz ,δK0x ,δK0y ,δK0z ,δD0x ,δD0y ,δD0z ]T (34)
Z(t)=[δrx,δry,δrz,δvx,δvy,δvz]T(35)Z(t)=[δrx ,δry ,δrz ,δvx ,δvy ,δvz ]T (35)

V(t)=[Δrx,Δry,Δrz,Δvx,Δvy,Δvz]T(37)V(t)=[Δrx ,Δry ,Δrz ,Δvx ,Δvy ,Δvz ]T (37)
利用泰勒公式展开并忽略高阶小项,得到离散化滤波模型:By expanding the Taylor formula and ignoring the high-order small terms, the discretized filtering model is obtained:
Xk=Φk,k-1Xk-1+Γk-1Wk-1(38)Xk =Φk,k-1 Xk-1 +Γk-1 Wk-1 (38)
Zk=HkXk+Vk(39)Zk =Hk Xk +Vk (39)
其中:


对系统驱动白噪声进行等效离散化处理,得到:By performing equivalent discretization on the system driving white noise, we can obtain:

其中,


其中,
对应离散卡尔曼滤波递推公式为:The corresponding discrete Kalman filter recursive formula is:




Pk=Pk,k-1-KkHkPk,k-1(49)Pk =Pk,k-1 -Kk Hk Pk,k-1 (49)
紧接着,建立SINS/GNSS组合导航自适应卡尔曼滤波模型。Next, the SINS/GNSS integrated navigation adaptive Kalman filter model is established.
其方法包括:The methods include:
第一步,建立Sage-Husa自适应卡尔曼滤波模型。The first step is to establish the Sage-Husa adaptive Kalman filter model.
离散时间线性系统模型如下:The discrete-time linear system model is as follows:

其中:wk~WN(qk,Qk),vk~WN(rk,Rk)。噪声均值可能非零,假设两噪声之间并无相关性,即存在:Where: wk ~WN(qk ,Qk ), vk ~WN(rk ,Rk ). The noise mean may be non-zero. Assuming there is no correlation between the two noises, there exists:

当高斯白噪声均值参数和方差矩阵的参数都是确定时,其滤波器的表达式如下:When the mean parameters and variance matrix parameters of Gaussian white noise are determined, the expression of the filter is as follows:

其中in


当不知道某些或所有的噪声参数时,必须采用某种手段,在进行滤波的时候,对其全部同时进行实时估计。以下给出了在不确定全部噪声参数的情况下的一种估算算法。When some or all noise parameters are unknown, some means must be used to estimate them all simultaneously in real time while filtering. An estimation algorithm is given below when all noise parameters are unknown.
第二步,量测噪声参数的估计。The second step is to estimate the measurement noise parameters.
方法包括:Methods include:

根据上式,整理可得According to the above formula, we can get

对上式求期望可得量测白噪声的均值为The expected value of the above equation is:

根据量测预测误差公式According to the measurement prediction error formula

对上式两边同时求方差,整理可得Find the variance on both sides of the above equation and rearrange it to get

第三步,状态噪声参数的估计。The third step is to estimate the state noise parameters.
方法包括:Methods include:
由卡尔曼滤波状态更新公式The Kalman filter state update formula

将上式整理为Rearrange the above formula into

在两侧噪声均值已知的条件下,并且滤波的状态估计值准确时,可对上式求期望。系统白噪声均值为:Under the condition that the mean value of the noise on both sides is known and the state estimation value of the filter is accurate, the expectation of the above formula can be calculated. The mean value of the system white noise is:

出于对滤波k时刻状态估计误差与新息误差并不相关的考虑。对上式两边同时求方差,整理得Considering that the state estimation error at filtering time k is not related to the new information error, the variance of both sides of the above equation is calculated and the result is

第四步,得出自适应卡尔曼滤波算法。The fourth step is to derive the adaptive Kalman filter algorithm.
方法包括:Methods include:
噪声参数的求解公式为式(55)、(57)、(60)及(61)。但是,在实践中,在有限时期的测量往往都是一个具有一定范围的随机过程。所以,只有当噪声稳定的时候,用时间平均的方法代替了所有的平均值,才能够对噪声的参数进行估算。The solution formulas for the noise parameters are (55), (57), (60) and (61). However, in practice, measurements over a limited period of time are often a random process with a certain range. Therefore, only when the noise is stable and the time average method is used to replace all the average values, can the noise parameters be estimated.
当噪声参数全部未知且是常值时,可以以式(55)作为例子。有以下的递推算法:When all noise parameters are unknown and constant, equation (55) can be used as an example. There is the following recursive algorithm:

对于以上其余三式,同理得:For the other three equations above, the same logic applies:



因此,如果用卡尔曼滤波公式(52)中的噪声参数全部用估计值来替代。当噪声参数未知且为常值时的Sage-Hsua的自适应卡尔曼滤波器,便由公式(52)与(62)~(65)构成。Therefore, if all the noise parameters in the Kalman filter formula (52) are replaced by estimated values, the Sage-Hsua adaptive Kalman filter when the noise parameters are unknown and constant is composed of formulas (52) and (62) to (65).
最后,影响滤波结果的参数分析。Finally, the parameters that affect the filtering results are analyzed.
滤波算法对目标进行滤波估计的过程中,会存在很多因素影响算法对目标滤波的结果,根据卡尔曼滤波算法的推导步骤,从推导步骤中可知对滤波结果产生影响的参数诸多。In the process of filtering and estimating the target by the filtering algorithm, there will be many factors that affect the result of the algorithm filtering the target. According to the derivation steps of the Kalman filtering algorithm, it can be known from the derivation steps that there are many parameters that affect the filtering results.
第一步,寻找影响滤波结果的参数,主要得出结果如表1所示。The first step is to find the parameters that affect the filtering results. The main results are shown in Table 1.
表1Table 1

从上面的参数列表中分析可得,除去一些确定的因素和中间值,影响滤波精度的参数主要有以下3个:初始协方差P0;过程激励噪声协方差Q;量测噪声协方差R。From the above parameter list, it can be analyzed that, except for some certain factors and intermediate values, the parameters that affect the filtering accuracy are mainly the following three: initial covariance P0 ; process excitation noise covariance Q ; measurement noise covariance R .
第二步,分析影响参数作用机理以及影响程度。The second step is to analyze the mechanism and degree of influence of the influencing parameters.
卡尔曼滤波是一种线性最小方差估算方法。当决定动态模型之后,首先需要确定状态估计的初值

Kalman滤波中的预测误差阵、增益矩阵以及滤波的误差协方差阵分别是:The prediction error matrix, gain matrix, and filter error covariance matrix in Kalman filtering are:


Pk+1=(I-Kk+1Hk+1)Pk+1,k(68)Pk+1 = (IKk+1 Hk+1 )Pk+1,k (68)
由式(66)~(68)可知,当Po、Qk、Rk+1发生倍数变化的时候,增益阵Kk+1是不变的。当Rk+1增大时,增益Kk+1反而变小。当Po变小或Qk变小以及二者都变小的时候,Pk+1,k也随之变小,从而Kk+1也变小。反之,也是如此。因此,从以上公式可以简单地看出,增益阵Kk+1与Qk成正比,与Rk+1成反比。From equations (66) to (68), it can be seen that when Po , Qk , and Rk+1 change by multiples, the gain matrix Kk+1 remains unchanged. When Rk+1 increases, the gain Kk+1 decreases. When Po decreases or Qk decreases or both decrease, Pk+1,k also decreases, and thus Kk+1 also decreases. The same is true in reverse. Therefore, it can be simply seen from the above formula that the gain matrix Kk+1 is proportional to Qk and inversely proportional to Rk+1 .
卡尔曼滤波在原理上需要预先知道精确的噪声参数。但是,在推导自适应滤波器的量测噪声均值参数rk时,假设k-1时刻的卡尔曼滤波器是无差估计的,qk-1是精确地知道的。在解决Rk的过程中,还假设rk是精确地知道的。同时,在推导出状态噪声平In principle, Kalman filtering requires accurate noise parameters to be known in advance. However, when deriving the measurement noise mean parameter rk of the adaptive filter, it is assumed that the Kalman filter at time k-1 is an error-free estimate and qk-1 is accurately known. In the process of solving Rk , it is also assumed that rk is accurately known. At the same time, when deriving the state noise mean parameter r k, it is assumed that the state noise mean parameter r k is accurately known.
均参数qk的估计时,也假设k时刻的卡尔曼滤波器的无偏性。而rk是众所周知且精确的。从以上两个方面可以看到,上述各参量并非相互独立,它们是相互约束的。所以,如果在某个过程中发生了一些干扰或偏差,那么就有很大的可能会对其它的部分产生影响,从而造成滤波的分散。When estimating the average parameter qk , it is also assumed that the Kalman filter at time k is unbiased. And rk is well known and accurate. From the above two aspects, we can see that the above parameters are not independent of each other, but they are mutually constrained. Therefore, if some interference or deviation occurs in a certain process, it is very likely to affect other parts, thus causing the dispersion of filtering.
而在实际应用中,这种自适应滤波器的性能也与其本身的结构参数密切相关,需要对其进行详细的研究。一般原理是,在滤波时,由于存在大量的不确定的参数,使得滤波时更易于产生离散。根据此原理,我们应当将未知的参数数量最小化。通常,系统的噪声主要取决于其内在机制。在此条件下,该方法的噪声参数是比较平稳的。所以,我们应该预先做一个完整的、准确的试验和建立模型。但是,在这种情况下,由于量测噪声的形成是由于外界的原因,外界的干扰对其影响很大。为了提高滤波器的稳定性能,需要对测量的噪声进行自适应处理。In practical applications, the performance of this adaptive filter is also closely related to its own structural parameters, and it needs to be studied in detail. The general principle is that when filtering, due to the presence of a large number of uncertain parameters, it is easier to produce discreteness when filtering. According to this principle, we should minimize the number of unknown parameters. Usually, the noise of the system mainly depends on its internal mechanism. Under this condition, the noise parameters of this method are relatively stable. Therefore, we should do a complete and accurate experiment and establish a model in advance. However, in this case, since the measurement noise is formed due to external reasons, external interference has a great impact on it. In order to improve the stability of the filter, it is necessary to adaptively process the measured noise.
第三步,针对参数P0的变化,进行仿真分析,如图2-7所示。The third step is to conduct simulation analysis on the change of parameterP0 , as shown in Figure 2-7.
参数初始化:地球长半径Re=6378245;地球扁率e=1/298.257;地球自转角速度ωie=7.292×10-5;Parameter initialization: Earth's major radiusRe = 6378245; Earth's flattening e = 1/298.257; Earth's rotation angular velocityωie = 7.292×10-5 ;
卡尔曼滤波参数初值为:The initial values of the Kalman filter parameters are:


实施例二
下面将结合本实施例二的仿真实验来进一步验证本申请的科学性。The scientific nature of this application will be further verified by combining the simulation experiment of the second embodiment.
表2Table 2

表3Table 3

表4Table 4

因此进行滤波器的优化设计中,要达到“最优”的滤波器特性,即响应速度较高且稳定精度较高,必须选取适当的参数,从而达到最佳的滤波效果。在实际工程应用时,可以先选择参数的一定范围,参考传感器的性能先验数值或者测试数值的统计特性。同时根据文中的结论,选择出合适的滤波参数。Therefore, in the optimization design of the filter, in order to achieve the "optimal" filter characteristics, that is, high response speed and high stability accuracy, appropriate parameters must be selected to achieve the best filtering effect. In actual engineering applications, a certain range of parameters can be selected first, referring to the prior performance values of the sensor or the statistical characteristics of the test values. At the same time, according to the conclusions in the article, the appropriate filtering parameters are selected.
首先,信息融合及其性能指标的建立。First, information fusion and its performance indicators are established.
第一步,要想构建一个有效的综合评估系统,必须正确理解出信息融合的所需的基本要求。当前的融合算法的性能评估技术,主要评估其精确度和实时性,因为这两个指标容易量化。但是,在实际工程中,算法的可靠性和稳定性同样是非常重要的。然而目前却没有一个行之有效的评估方法。所以,在对该方法进行品质绩效的基础评估时,应当将其归纳为:准确、实时、稳定、可靠。基于以上四项基本定义的需求来选择相应的性能指标。具体分析包括:滤波精度、实时性、鲁棒性和容错性。The first step is to correctly understand the basic requirements of information fusion in order to build an effective comprehensive evaluation system. The current performance evaluation technology of fusion algorithms mainly evaluates its accuracy and real-time performance, because these two indicators are easy to quantify. However, in actual engineering, the reliability and stability of the algorithm are also very important. However, there is currently no effective evaluation method. Therefore, when conducting a basic evaluation of the quality performance of this method, it should be summarized as: accurate, real-time, stable, and reliable. Select the corresponding performance indicators based on the above four basic defined requirements. The specific analysis includes: filtering accuracy, real-time, robustness, and fault tolerance.
滤波精度是指滤波状况和实际状况之间的差异。同时也可以看作是对状态变量进行估计时产生的差异。在离散系统的卡尔曼滤波中,采用了方差误差分析的方法对所得到的状态参数进行了分析。推导出的状态估计均方差误差矩阵为:Filter accuracy refers to the difference between the filtered state and the actual state. It can also be regarded as the difference generated when estimating the state variables. In the Kalman filter of discrete systems, the variance error analysis method is used to analyze the obtained state parameters. The derived state estimation mean square error matrix is:

式中,In the formula,

然而在实际应用中,往往难以准确获得出系统的实际模型。因此能够推导得出在工程中更为实用的定量表征滤波精度的公式便显得尤为重要。However, in practical applications, it is often difficult to accurately obtain the actual model of the system. Therefore, it is particularly important to be able to derive a formula that is more practical in engineering to quantitatively characterize the filtering accuracy.
对于一个成型的组合导航系统,所建立的模型与实际系统非常接近的观点通常被认同。即

在以上的近似精度表达式中,除了系统噪声矩阵、测量噪声矩阵和系统噪声驱动矩阵为真实外,卡尔曼滤波器估算的均方误差与一步预测均方误差阵基本一致。一般情况下,难以得到这些参量的实际数值,所以我们提出了采用卡尔曼滤波器的估计均方误差矩阵来描述其滤波率。为方便对比,必须导出可以定量表示的一个精度指标。用均方误差矩阵的对角线元素来作为相对应的状态量误差,确定了滤波器的精度的标准公式如下:In the above approximate accuracy expression, except for the system noise matrix, measurement noise matrix and system noise driving matrix, the mean square error estimated by the Kalman filter is basically consistent with the one-step prediction mean square error matrix. In general, it is difficult to obtain the actual values of these parameters, so we propose to use the estimated mean square error matrix of the Kalman filter to describe its filtering rate. For the convenience of comparison, an accuracy index that can be quantitatively expressed must be derived. Using the diagonal elements of the mean square error matrix as the corresponding state quantity error, the standard formula for determining the accuracy of the filter is as follows:

实时性描述的是滤波算法的动态性能。其中滤波状态、系统的硬件能力以及滤波计算会一定程度的影响到滤波的实时性。假设一个动态系统中的滤波间隔要求为td,而实际的滤波间隔的时间为t。其中算法必须要满足,要求的滤波间隔大于实际的滤波间隔时间,即td>t。Real-time performance describes the dynamic performance of the filtering algorithm. The filtering state, the hardware capability of the system, and the filtering calculation will affect the real-time performance of the filtering to a certain extent. Assume that the filtering interval requirement in a dynamic system is td , and the actual filtering interval time is t. The algorithm must meet the requirement that the required filtering interval is greater than the actual filtering interval time, that is, td > t.
在进行对实时性研究时,研究得出,通过分析模型可以直接从算法的方程以及硬件的执行速度中得到实时性指标。研究中给到的计算模型如下:When conducting real-time research, the study concluded that the real-time index can be directly obtained from the algorithm equations and the execution speed of the hardware through the analysis model. The calculation model given in the study is as follows:
t=f(Ni,Nm,Na,Ns,No)/th(73)t=f(Ni ,Nm ,Na ,Ns ,No )/th (73)
其中,Ni表示滤波器所需的矩阵求逆的数量。Nm表示出滤波器在一个滤波周期内所需要的乘法的数量。Na表示出滤波器在一个滤波周期内所需要的加法的数量。th表现的是硬件的执行速度。Ns表示的是滤波的状态的数量。No表示的是其他的运算方式。WhereNi represents the number of matrix inversions required by the filter.Nm represents the number of multiplications required by the filter in one filtering cycle.Na represents the number of additions required by the filter in one filtering cycle.Theh represents the execution speed of the hardware.Ns represents the number of filtering states.No represents other calculation methods.

realt=td/t(74)realt=td /t(74)
这个模型可以用于对算法实时性的评价,也可以实现在线实时性测试;通过在程序中设置计时器用来统计算法的解算时间。This model can be used to evaluate the real-time performance of the algorithm and to implement online real-time testing; a timer is set in the program to count the algorithm's solution time.
鲁棒性描述了滤波器对于滤波对象的结构以及参数变化的一种敏感性。或者可以理解为在一定的系统参数变化的范围内,滤波器仍然可以正常工作的一种能力。在组合导航系统中,滤波器的鲁棒性可以表现在当系统参数或外部环境发生变化的时候,滤波器仍然可以保持着一定滤波精度的能力。Robustness describes the sensitivity of the filter to the structure and parameter changes of the filter object. Or it can be understood as the ability of the filter to work normally within a certain range of system parameter changes. In the integrated navigation system, the robustness of the filter can be manifested in the ability of the filter to maintain a certain filtering accuracy when the system parameters or external environment change.
与此同时,我们可以通过H∞鲁棒滤波算法得到鲁棒性的性能指标。滤波的鲁棒性与γ等级有关,这是从H∞鲁棒滤波原理得知的。具体可以描述为,当γ的值越小,表明滤波的鲁棒性越好。虽然鲁棒性好,但不意味着方差是最小的。换句话说,鲁棒性好不意味着滤波精度就高。除此之外,γ过于小,可能直接导致H∞滤波器不存在。然而当γ→∞时,却可以得到最小的方差估计。但当γ→∞时,可以看出鲁棒性很差。由此,在某种意义上,算法的鲁棒性是可以由γ度量的。定义该算法的鲁棒性指标如下:At the same time, we can get the robustness performance index through theH∞ robust filtering algorithm. The robustness of the filter is related to the γ level, which is known from theH∞ robust filtering principle. Specifically, it can be described as follows: the smaller the value of γ, the better the robustness of the filter. Although the robustness is good, it does not mean that the variance is the smallest. In other words, good robustness does not mean high filtering accuracy. In addition, if γ is too small, it may directly lead to the non-existence of theH∞ filter. However, when γ→∞, the minimum variance estimate can be obtained. But when γ→∞, it can be seen that the robustness is very poor. Therefore, in a sense, the robustness of the algorithm can be measured by γ. The robustness index of the algorithm is defined as follows:

式中,

当滤波器出现故障,并且没有采取诊断措施的时候,在一定精度要求的条件下,滤波器仍能正常工作的性能。When the filter fails and no diagnostic measures are taken, the filter can still work normally under certain accuracy requirements.
在此以后,我们要找到可以衡量滤波器容错性能的一个量。我们可以知道,在观测量中可以直接反应故障信息。间接反映在残差量中,残差表达式为:After this, we need to find a quantity that can measure the fault tolerance performance of the filter. We can know that the fault information can be directly reflected in the observed quantity and indirectly reflected in the residual quantity. The residual expression is:
Dk=Zk-HkXk/k-1(75)Dk = Zk - Hk Xk/k-1 (75)
滤波正常时,残差是服从正态分布的零均值高斯白噪声,残差的协方差阵为:When the filtering is normal, the residual is zero-mean Gaussian white noise that obeys the normal distribution, and the covariance matrix of the residual is:

在正常情况下,Dk的任意一个分量Di,k均满足下式:Under normal circumstances, any component Di,k of Dk satisfies the following formula:

其中[·]ii表示矩阵第i个对角线元素,C为常数。对于数据处理精度的要求确定,通常用3σ原理,并结合实际的物理背景。然而从实际情况上看,只有当系统平稳不发生故障或者只发生小幅度的故障时,上述关系才是满足的。然而当系统或者某个分量发生严重的故障或者失真时,上述关系便不再满足。同时,滤波也会随之而发散。Where [·]ii represents the i-th diagonal element of the matrix, and C is a constant. The 3σ principle is usually used to determine the requirements for data processing accuracy, combined with the actual physical background. However, from a practical point of view, the above relationship is only satisfied when the system is stable and does not fail or only a small failure occurs. However, when the system or a component has a serious failure or distortion, the above relationship is no longer satisfied. At the same time, the filtering will also diverge.
由此,我们可以定义滤波器的容错性能指标为:Therefore, we can define the fault tolerance performance index of the filter as:

当出现故障时:如果faut的数值较大,则表示滤波器的容错能力较强。如果faut的数值较小,则表示滤波器的容错能力较差。When a fault occurs: If the value of faut is large, it means that the filter has a strong fault tolerance. If the value of faut is small, it means that the filter has a poor fault tolerance.
之后,结合线性降维理论,构建组合导航多性能指标融合评估体系。Afterwards, combined with the linear dimensionality reduction theory, a multi-performance index fusion evaluation system for combined navigation is constructed.
本实施例二对滤波性能标准进行了优化,以寻找能够反映出原始数据特性的标准。基于线性降维理论,可以将高维空间数据映射到低维空间。在对多性能指标进行优化的过程中,采用了一种加速遗传算法,以得到最优性能表示方式。使用加权评价的方法,得出评估指数的权值。最后,根据数据分析得到的值进行相应的加权,求出了最优的多性能指标融合评估体系。The second embodiment optimizes the filtering performance standard to find a standard that can reflect the characteristics of the original data. Based on the linear dimensionality reduction theory, high-dimensional space data can be mapped to low-dimensional space. In the process of optimizing multiple performance indicators, an accelerated genetic algorithm is used to obtain the optimal performance representation. The weighted evaluation method is used to obtain the weight of the evaluation index. Finally, the values obtained by data analysis are weighted accordingly to obtain the optimal multi-performance indicator fusion evaluation system.
第一步,数据标准化处理。The first step is data standardization.
由于在进行比较的时候,各个不同的指标,它们的单位以及数量级上都不一致。可以称他们具有不一样的量纲,因此不能进行比较分析和计算。为了将各个数据统一至同一数量级,以及统一各个指标值的变化范围,本实施例二通过采用最小最大规范化法来进行标准化处理。方法包括:Because when making comparisons, the units and magnitudes of different indicators are inconsistent. They can be said to have different dimensions, so they cannot be compared, analyzed, and calculated. In order to unify the various data to the same magnitude and unify the range of variation of the various indicator values, this
x*(i,j)=[x(i,j)-xmin(j)]/[xmax(j)-xmin(j)] (79)x* (i,j)=[x(i,j)-xmin (j)]/[xmax (j)-xmin (j)] (79)
式中,x*(i,j)为第i个样本中的第j个指标的标准化后的指标值;x(i,j)为第i个样本中的第j个指标的指标值;xmin(j)为样本集中的第j个指标的最小值;xmax(j)为样本集中的第j个指标的最大值。In the formula, x* (i, j) is the standardized index value of the jth index in the i-th sample; x(i, j) is the index value of the jth index in the i-th sample; xmin (j) is the minimum value of the jth index in the sample set; xmax (j) is the maximum value of the jth index in the sample set.
第二步,利用线性降维理论,将高维数据降为一维数据。具体方法包括:采用最大最小规范化法来进行归一化处理,并将多维数据综合为一维降维值,进而结合采用实数进行编码的加速遗传算法,得到所述最佳降维值。The second step is to reduce the high-dimensional data to one-dimensional data using linear dimensionality reduction theory. The specific method includes: using the maximum and minimum normalization method to perform normalization processing, and integrating the multi-dimensional data into a one-dimensional dimensionality reduction value, and then combining it with an accelerated genetic algorithm using real number encoding to obtain the optimal dimensionality reduction value.
在本实施例二中,使用线性降维的方法可以表示为将标准化后的p维数据{x(i,j)∣j=1~p},综合成一维值z(i)。其中降维方向为In the second embodiment, the linear dimensionality reduction method can be expressed as integrating the standardized p-dimensional data {x(i,j)|j=1~p} into a one-dimensional value z(i). The dimensionality reduction direction is

其中,a=(a(1),a(2),…,a(p))。Among them, a=(a(1),a(2),…,a(p)).
各样本实施例二的综合评价计算值即为一维降维值z(i)。为可实现对样本集数据的比较与分析,文章通过比较一维降维值大小来判断。与此同时,a=(a(1),a(2),…,a(p))是单位长度向量,第j项指标的权重值也可以表示为最佳降维方向的a(j)。The comprehensive evaluation calculation value of each
在我们进行计算出最优的综合降维值时,z(i)要努力地展现出研究该问题样本的数据特征。可以从几何问题的角度进行分析,当在局部的降维点的分布更为密集,而在整体的降维区域中各个点团之间的距离要求尽可能大,是最为理想的分布特征。使z(i)的局部密度更大,标准差也随之更大。这个便是基于以上思想的计算方式。因此我们构造降维函数为:When we calculate the optimal comprehensive dimensionality reduction value, z(i) should strive to show the data characteristics of the sample of the problem. From the perspective of geometric problems, it can be analyzed that when the distribution of local dimensionality reduction points is denser, and the distance between each point group in the overall dimensionality reduction area is as large as possible, it is the most ideal distribution feature. Make the local density of z(i) larger, and the standard deviation will also be larger. This is the calculation method based on the above ideas. Therefore, we construct the dimensionality reduction function as:
Q(a)=Sz·Dz (81)Q(a)=Sz ·Dz (81)
式中:Sz是降维值z(i)的标准差。Dz是降维值z(i)的局部密度。Where: Sz is the standard deviation of the reduced value z(i).D z is the local density of the reduced value z(i).


其中,rik是降维特征值之间的距离。rik=|z(i)-z(k)|,(i,k=1,2,...,n)Whererik is the distance between the reduced eigenvalues.rik = |z(i)-z(k)|, (i, k = 1, 2, ..., n)
R是窗宽参数,本实施例二选取R=0.1Sz。u是一阶单位阶跃函数。R is a window width parameter, and in the second embodiment, R=0.1Sz is selected. u is a first-order unit step function.

式(81)所示的便为降维指标函数。在数据已知的情况下,最终得出的值只会受降维方向向量a的影响。因此为了求解出最佳的方向向量,可以通过求出降维指标函数最大化的问题来进行解决。The dimensionality reduction index function is shown in formula (81). When the data is known, the final value is only affected by the dimensionality reduction direction vector a. Therefore, in order to solve the optimal direction vector, the problem of maximizing the dimensionality reduction index function can be solved.
MaxQ(a)=SZ×DZMaxQ(a)=SZ ×DZ

由于直接采用(81)来进行求解降维指标函数的整个过程其实是一个复杂的非线性优化问题。因此我们可以采用加速遗传算法来求解上述问题能有效地简化求解过程。Since the whole process of directly using (81) to solve the dimension reduction index function is actually a complex nonlinear optimization problem, we can use an accelerated genetic algorithm to solve the above problem, which can effectively simplify the solution process.
第三步,利用加速遗传算法优化降维指标函数。The third step is to use the accelerated genetic algorithm to optimize the dimension reduction index function.
用GA方法结合目标函数反映的高维数据的结构特性,在优化区域内可以直接寻找到最优解。By using the GA method combined with the structural characteristics of high-dimensional data reflected by the objective function, the optimal solution can be directly found in the optimization region.
遗传算法中的种群由多个个体组成,其中,每个个体对应一个问题的解,每一个个体又叫做一个染色体,一个染色体由多个基因组成。应用遗传算法时需要对种群进行初始化,种群初始化包括确定种群数量和编码解码方式。种群数量一般是根据具体问题进行设置,设置完成后的种群数量在算法中一般不再发生改变。种群初始化的一种常见方式是采用随机方法产生。种群的编码和解码是互逆的操作,编码就是将待优化问题的解空间中的可行解以一种编码的方法表达;解码是从得到的最优个体中提取原问题的解,即从遗传算法空间映射到待优化问题的解空间。The population in the genetic algorithm is composed of multiple individuals, each of which corresponds to a solution to a problem. Each individual is also called a chromosome, and a chromosome consists of multiple genes. When applying a genetic algorithm, the population needs to be initialized. Population initialization includes determining the population size and encoding and decoding methods. The population size is generally set according to the specific problem, and the population size after setting generally does not change in the algorithm. A common way to initialize the population is to generate it by random methods. Encoding and decoding of the population are reciprocal operations. Encoding is to express the feasible solutions in the solution space of the problem to be optimized in a coded way; decoding is to extract the solution of the original problem from the optimal individual obtained, that is, mapping from the genetic algorithm space to the solution space of the problem to be optimized.
实际上是用遗传算法得到一个最优的系统噪声协方差阵Q和状态协方差阵初值P0,用Q和P0滤波得到加速度计零次项和姿态角初值偏差,所以遗传算法需要解决的直接问题是找到最优的Q和P0,即一个个体应该与一对Q和P0相对应。In fact, the genetic algorithm is used to obtain an optimal system noise covariance matrix Q and the initial value of the state covariance matrixP0 , and the accelerometer zero-order term and the initial attitude angle deviation are obtained by filtering with Q andP0 . Therefore, the direct problem that the genetic algorithm needs to solve is to find the optimal Q andP0 , that is, an individual should correspond to a pair of Q andP0 .
标准的遗传算法的编码方式采用的是二进制编码,编码的过程比较繁琐,而且会收到字串长度的限制而影响其精度。而加速遗传算法则是采用实数进行编码。并且加速遗传算法采用的评价函数,不会受到实际目标值的影响。在系统进行进化迭代的时候,每次遗传进化时产生的子代都会被保存起来,这样能尽可能地保证种群的个体多样性。才能选出更合适的个体解,并且可以加速算法时间。The encoding method of the standard genetic algorithm uses binary encoding, which is cumbersome and will be limited by the length of the string, affecting its accuracy. The accelerated genetic algorithm uses real numbers for encoding. And the evaluation function used by the accelerated genetic algorithm will not be affected by the actual target value. When the system is evolving and iterating, the offspring generated by each genetic evolution will be saved, so that the individual diversity of the population can be guaranteed as much as possible. Only in this way can a more suitable individual solution be selected and the algorithm time can be accelerated.
基于加速遗传算法,需要优化的问题为:Based on the accelerated genetic algorithm, the problem to be optimized is:

其中,矩阵A的模为1,且矩阵中的各个分量都满足
本实施例二定义:This second embodiment defines:
N=400;Pc=0.8;Pm=0.8;M=10;Ci=7;n=4;DaiNo=2;ads=1。其中种群的规模由N来表示。交叉的概率由Pc来表示。变异概率由Pm来表示。为了设定在进行两代进化之后加速一次,由DaiNo来表示。优化的变量数目由n来表示。编译方向所需要的随机数由M来表示。其中加速次数由Ci来表示。N = 400; Pc = 0.8; Pm = 0.8; M = 10; Ci = 7; n = 4; DaiNo = 2; ads = 1. The size of the population is represented by N. The probability of crossover is represented by Pc. The probability of mutation is represented by Pm. In order to set the acceleration once after two generations of evolution, it is represented by DaiNo. The number of optimized variables is represented by n. The random number required for the compilation direction is represented by M. The number of accelerations is represented by Ci.
第四步,最佳降维值分析与综合评价。The fourth step is the optimal dimensionality reduction value analysis and comprehensive evaluation.
计算种群的适应度需要适值函数,适值函数的设计一般与目标函数相对应。本论文中遗传算法是实现对Q和P0的估计,但是不可能知道和的最优值,所以只能采取间接的方法。Calculating the fitness of a population requires a fitness function, and the design of the fitness function generally corresponds to the objective function. In this paper, the genetic algorithm is used to estimate Q and P0 , but it is impossible to know the optimal value of and, so only an indirect method can be used.
根据参数估计方法,除去需要估计的参数,得到的只有速度、位置和姿态信息,另外参数估计的最终目的是得到更加精确的速度、位置和姿态,所以考虑计算速度误差、位置误差和姿态误差,然后采用加权的方法构成一个标量来描述个体的适应度。According to the parameter estimation method, excluding the parameters that need to be estimated, only the speed, position and attitude information are obtained. In addition, the ultimate goal of parameter estimation is to obtain more accurate speed, position and attitude, so consider calculating the speed error, position error and attitude error, and then use the weighted method to form a scalar to describe the fitness of the individual.
最优的Q和P0滤波对应最准确的加速度计零次项、最小的姿态角误差、最小的速度误差和最小的位置误差。由于速度误差和位置误差是滤波的直接观测量,滤波效果都比较好,不同的Q和P0得到的滤波结果差异不是特别大,所以主要考虑加速度计零次项和姿态初值误差。The optimal Q and P0 filter corresponds to the most accurate accelerometer zero-order term, the smallest attitude angle error, the smallest velocity error, and the smallest position error. Since the velocity error and position error are direct observables of the filter, the filtering effect is relatively good, and the filtering results obtained by different Q and P0 are not particularly different, so the accelerometer zero-order term and the initial attitude error are mainly considered.
通过将上一步获得出的最佳降维方向向量a代入到公式(80)中,便可以通过计算获得到各个样本的降维值,也就是样本最终的综合评价结果。对降维值的大小进行排序,即可判断出各个样本的优劣。By substituting the optimal dimension reduction direction vector a obtained in the previous step into formula (80), the dimension reduction value of each sample can be calculated, that is, the final comprehensive evaluation result of the sample. By sorting the dimension reduction values, the quality of each sample can be judged.
最后,如图8-10所示,为本实施二的飞行器多种运动状态匀速及匀加速飞行仿真实验。Finally, as shown in Figures 8-10, this is the uniform speed and uniform acceleration flight simulation experiment of the aircraft in various motion states of this
首先,设置仿真条件与参数。First, set the simulation conditions and parameters.
飞行器以正北的方向为初始航向,高度25m匀速飞行600s。表5为初始位置:北纬45°;东经120°的航向过程,表6为参数设置。The aircraft takes the north direction as the initial heading and flies at a constant speed for 600s at an altitude of 25m. Table 5 shows the heading process of the initial position: 45°N; 120°E, and Table 6 shows the parameter settings.
表5Table 5

表6Table 6

表7Table 7

按上述的方法,计算出最佳降维方向为[0.2104,0.0223,0.6407,0.7381]。最终计算出这两种滤波方法的最终评价值为[0.5354,0.2685,1.3651,1.3384],结果如图11所示。由评估结果可以看出,两种滤波算法在两种情况下,其优化效果是3>4>1>2。结果表明,选择以上四种性能指标时,基于常规卡尔曼滤波器的自适应滤波器有强抗干扰性。其综合评估结果优于常规卡尔曼滤波器,这一结果符合了先前的理论分析。According to the above method, the best dimensionality reduction direction is calculated as [0.2104, 0.0223, 0.6407, 0.7381]. Finally, the final evaluation values of the two filtering methods are calculated as [0.5354, 0.2685, 1.3651, 1.3384], as shown in Figure 11. From the evaluation results, it can be seen that the optimization effect of the two filtering algorithms in the two cases is 3>4>1>2. The results show that when the above four performance indicators are selected, the adaptive filter based on the conventional Kalman filter has strong anti-interference. Its comprehensive evaluation results are better than the conventional Kalman filter, which is consistent with the previous theoretical analysis.
以上所述的实施例仅是对本申请优选方式进行的描述,并非对本申请的范围进行限定,在不脱离本申请设计精神的前提下,本领域普通技术人员对本申请的技术方案做出的各种变形和改进,均应落入本申请权利要求书确定的保护范围内。The embodiments described above are only descriptions of the preferred methods of the present application, and are not intended to limit the scope of the present application. Without departing from the design spirit of the present application, various modifications and improvements made to the technical solutions of the present application by ordinary technicians in this field should fall within the scope of protection determined by the claims of the present application.
Claims (8)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211494167.9ACN115855104A (en) | 2022-11-25 | 2022-11-25 | Optimal online evaluation method for combined navigation filtering result |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211494167.9ACN115855104A (en) | 2022-11-25 | 2022-11-25 | Optimal online evaluation method for combined navigation filtering result |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115855104Atrue CN115855104A (en) | 2023-03-28 |
Family
ID=85666707
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211494167.9APendingCN115855104A (en) | 2022-11-25 | 2022-11-25 | Optimal online evaluation method for combined navigation filtering result |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115855104A (en) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101949703A (en)* | 2010-09-08 | 2011-01-19 | 北京航空航天大学 | Strapdown inertial/satellite combined navigation filtering method |
| CN104034329A (en)* | 2014-06-04 | 2014-09-10 | 南京航空航天大学 | Multi-integrated navigation processing device under launch inertial system and navigation method of multi-integrated navigation processing device |
| CN108106635A (en)* | 2017-12-15 | 2018-06-01 | 中国船舶重工集团公司第七0七研究所 | Inertia defends the anti-interference posture course calibration method of long endurance for leading integrated navigation system |
| CN108225308A (en)* | 2017-11-23 | 2018-06-29 | 东南大学 | A kind of attitude algorithm method of the expanded Kalman filtration algorithm based on quaternary number |
| CN109934484A (en)* | 2019-03-08 | 2019-06-25 | 哈尔滨工程大学 | A Performance Evaluation Method of INS/USBL Integrated Navigation System Based on Nonlinear FCE |
| CN111351481A (en)* | 2020-03-13 | 2020-06-30 | 南京理工大学 | Transmission alignment method based on emission inertial coordinate system |
| CN112857398A (en)* | 2021-01-12 | 2021-05-28 | 中国人民解放军海军工程大学 | Rapid initial alignment method and device for ships in mooring state |
| CN113050143A (en)* | 2021-06-02 | 2021-06-29 | 西北工业大学 | Tightly-coupled navigation method under emission inertial coordinate system |
- 2022
- 2022-11-25CNCN202211494167.9Apatent/CN115855104A/enactivePending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101949703A (en)* | 2010-09-08 | 2011-01-19 | 北京航空航天大学 | Strapdown inertial/satellite combined navigation filtering method |
| CN104034329A (en)* | 2014-06-04 | 2014-09-10 | 南京航空航天大学 | Multi-integrated navigation processing device under launch inertial system and navigation method of multi-integrated navigation processing device |
| CN108225308A (en)* | 2017-11-23 | 2018-06-29 | 东南大学 | A kind of attitude algorithm method of the expanded Kalman filtration algorithm based on quaternary number |
| CN108106635A (en)* | 2017-12-15 | 2018-06-01 | 中国船舶重工集团公司第七0七研究所 | Inertia defends the anti-interference posture course calibration method of long endurance for leading integrated navigation system |
| CN109934484A (en)* | 2019-03-08 | 2019-06-25 | 哈尔滨工程大学 | A Performance Evaluation Method of INS/USBL Integrated Navigation System Based on Nonlinear FCE |
| CN111351481A (en)* | 2020-03-13 | 2020-06-30 | 南京理工大学 | Transmission alignment method based on emission inertial coordinate system |
| CN112857398A (en)* | 2021-01-12 | 2021-05-28 | 中国人民解放军海军工程大学 | Rapid initial alignment method and device for ships in mooring state |
| CN113050143A (en)* | 2021-06-02 | 2021-06-29 | 西北工业大学 | Tightly-coupled navigation method under emission inertial coordinate system |
Non-Patent Citations (4)
| Title |
|---|
| 李栋 等: "一种组合导航滤波算法的品质评估方法", 电光与控制, vol. 27, no. 4, pages 94 - 97* |
| 杨阳: "组合导航滤波算法设计及其性能评估方法研究", 中国优秀硕士学位论文全文数据库信息科技辑, no. 11, pages 6 - 25* |
| 赵欣 等: "一种组合导航信息融合算法品质评估方法", 中国惯性技术学报, vol. 20, no. 2, pages 211 - 219* |
| 邵梦晗: "惯性_卫星组合导航状态在线评估与优化", 中国优秀硕士学位论文全文数据库信息科技辑, no. 3, pages 5 - 20* |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2019454278B2 (en) | Estimating the fidelity of quantum logic gates and quantum circuits | |
| US11822007B2 (en) | System and method for identification of an airborne object | |
| US9683865B2 (en) | In-use automatic calibration methodology for sensors in mobile devices | |
| CN107608335A (en) | A kind of UAV Flight Control System fault detect and the data-driven method of fault reconstruction | |
| WO2020087845A1 (en) | Initial alignment method for sins based on gpr and improved srckf | |
| CN109239604A (en) | A kind of Unscented kalman filtering on-vehicle battery SOC estimation method based on state-detection mechanism | |
| CN110516890B (en) | Crop yield monitoring system based on gray combined model | |
| CN107389049A (en) | A kind of magnetic compass real-time error compensation method based on class Kalman's factor | |
| CN111896029A (en) | A Random Error Compensation Method of MEMS Gyroscope Based on Combination Algorithm | |
| Lee | On the choice of MCMC kernels for approximate Bayesian computation with SMC samplers | |
| CN115795995A (en) | A Resonant Gyro Temperature Compensation Method Based on Stepwise Regression and Gaussian Process | |
| CN109857127A (en) | The method, apparatus that training neural network model and attitude of flight vehicle resolve | |
| CN114964313A (en) | A Method of Temperature Compensation of Fiber Optic Gyroscope Based on RVM | |
| CN112346033B (en) | A Single Infrared Sensor Target Orbit Determination Method for Measurement Data with Zero Bias | |
| CN113988458A (en) | Anti-money laundering risk monitoring method and model training method, device, equipment and medium | |
| US20180266824A1 (en) | High-performance inertial measurements using a redundant array of inexpensive inertial sensors | |
| Shirani Faradonbeh et al. | Thompson sampling efficiently learns to control diffusion processes | |
| Akella et al. | Safety-critical controller verification via Sim2Real gap quantification | |
| Sambharya et al. | Data-driven performance guarantees for classical and learned optimizers | |
| CN105550457A (en) | Dynamic evolution model correction method and system | |
| CN113505445B (en) | Real-time fault diagnosis method and system based on sequential random forest | |
| CN115855104A (en) | Optimal online evaluation method for combined navigation filtering result | |
| CN110211189A (en) | ToF camera depth error modeling bearing calibration and device | |
| Saha et al. | Ard-vae: A statistical formulation to find the relevant latent dimensions of variational autoencoders | |
| CN110702142A (en) | Triaxial magnetometer full-parameter external field calibration method assisted by triaxial accelerometer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | Application publication date:20230328 | |
| RJ01 | Rejection of invention patent application after publication |