CN115830895A - Control method and system for vehicle to enter intelligent internet motorcade - Google Patents
Control method and system for vehicle to enter intelligent internet motorcadeDownload PDFInfo
- Publication number
- CN115830895A CN115830895ACN202211348153.6ACN202211348153ACN115830895ACN 115830895 ACN115830895 ACN 115830895ACN 202211348153 ACN202211348153 ACN 202211348153ACN 115830895 ACN115830895 ACN 115830895A
- Authority
- CN
- China
- Prior art keywords
- vehicle
- speed
- fleet
- control
- intelligent
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Landscapes
- Traffic Control Systems (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及道路车辆驾驶控制技术领域,尤其是涉及一种车辆汇入智能网联车队的控制方法及系统。The invention relates to the technical field of driving control of road vehicles, in particular to a control method and system for merging vehicles into intelligent networked fleets.
背景技术Background technique
当前,随着人工智能技术、信息技术的快速发展,车路协同与自动驾驶成为交通运输领域的一大发展趋势。由于智能网联车辆能有效提高交通系统的安全性、移动性和可持续性,其控制器的研发得到了广泛的关注。作为智能网联汽车领域最重要的应用之一,协作式自适应巡航(CACC)通过车车之间(V2V)和车路之间的通信(V2I),实现信息共享以达到协同控制的目的,在提升交通效率、保障串行稳定性、减少能耗和排放等方面具有多重优势。At present, with the rapid development of artificial intelligence technology and information technology, vehicle-road coordination and automatic driving have become a major development trend in the field of transportation. Since ICVs can effectively improve the safety, mobility, and sustainability of transportation systems, the research and development of their controllers has received extensive attention. As one of the most important applications in the field of intelligent networked vehicles, cooperative adaptive cruise control (CACC) realizes information sharing to achieve the purpose of collaborative control through vehicle-to-vehicle (V2V) and vehicle-to-road communication (V2I). It has multiple advantages in improving traffic efficiency, ensuring serial stability, and reducing energy consumption and emissions.
然而,现有对智能网联车队的研究存在以下明显缺陷:However, the existing research on ICV has the following obvious flaws:
1)现有的研究忽略了车辆汇入智能网联车队行为的分析。传统的车辆汇入模型主要是基于间距做出是否汇入的决策,若间距足够大,车辆将选择直接汇入,否则驾驶员将等待,整个汇入操作是被动的。而车辆汇入智能网联车队场景,因驾驶员需要加速以赶上车队所拉开的空间再通过换道完成汇入,整个过程是主动的。1) The existing research ignores the analysis of the behavior of vehicles entering the intelligent network fleet. The traditional vehicle merging model is mainly based on the distance to make a decision on whether to merge. If the distance is large enough, the vehicle will choose to merge directly, otherwise the driver will wait, and the entire merging operation is passive. In the scene where the vehicle merges into the intelligent networked convoy, the driver needs to accelerate to catch up with the space created by the convoy and then complete the merge by changing lanes. The whole process is active.
2)现有的车辆汇入研究主要聚焦于人类驾驶场景下对换道间距的分析,换道模型的精确程度将直接关系评估智能网联车队所占有车道对邻近普通车道影响的准确性。2) Existing research on vehicle merging mainly focuses on the analysis of lane-changing distances in human driving scenarios. The accuracy of the lane-changing model will directly affect the accuracy of evaluating the impact of lanes occupied by ICV fleets on adjacent ordinary lanes.
发明内容Contents of the invention
本发明的目的就是为了提供一种车辆汇入智能网联车队的控制方法及系统,克服了传统车辆汇入场景的聚焦于人类驾驶并以换道间距模型为研究方式的局限性,针对车辆的不同智能化水平,通过车路通信技术设计了纵向速度引导方案和基于模型预测控制的纵向控制,实现对车辆安全、高效汇入智能网联车队的精准控制。The purpose of the present invention is to provide a control method and system for vehicles to join the intelligent networked fleet, which overcomes the limitations of the traditional vehicle import scene that focuses on human driving and takes the lane-changing distance model as the research method. With different levels of intelligence, the longitudinal speed guidance scheme and the longitudinal control based on model predictive control are designed through the vehicle-road communication technology, so as to realize the precise control of the safe and efficient integration of vehicles into the intelligent networked fleet.
本发明的目的可以通过以下技术方案来实现:The purpose of the present invention can be achieved through the following technical solutions:
一种车辆汇入智能网联车队的控制方法,包括以下步骤:A control method for vehicles joining an intelligent networked fleet, comprising the following steps:
获取车载传感器感知到的道路环境信息,识别汇入主车道内前后方的车辆状态;Obtain the road environment information sensed by the on-board sensors, and identify the status of vehicles in the front and rear of the main lane;
获取待汇入智能网络车队的车辆的自车信息和交通管理信息;Obtain the self-vehicle information and traffic management information of the vehicles to be imported into the intelligent network fleet;
利用V2I技术将道路环境信息、自车信息和交通管理信息发送至路侧计算单元并存储;Use V2I technology to send road environment information, self-vehicle information and traffic management information to the roadside computing unit and store them;
路侧计算单元对存储的数据进行预处理;The roadside computing unit preprocesses the stored data;
路侧计算单元规划车辆汇入智能网联车队的驾驶方案,得到速度引导方案;The roadside computing unit plans the driving plan for the vehicles to join the intelligent network fleet, and obtains the speed guidance plan;
路侧计算单元通过I2V技术将速度引导方案分别发送至智能网联车辆和人类驾驶网联车辆;The roadside computing unit sends the speed guidance scheme to the intelligent networked vehicle and the human-driven networked vehicle respectively through I2V technology;
人类驾驶网联车辆的人机交互界面显示速度引导方案,为驾驶员提供汇入引导;The human-computer interaction interface of the human-driven networked vehicle displays the speed guidance scheme and provides import guidance for the driver;
智能网联车辆根据速度引导方案,基于自车的优化控制器优化控制纵向加速及制动过程,得到优化控制指令,车辆动力系统、制动系统执行优化控制指令,实现安全、高效地汇入智能网联车队。According to the speed guidance scheme, the intelligent networked vehicle optimizes the longitudinal acceleration and braking process based on the optimal controller of the vehicle, and obtains the optimized control command. The vehicle power system and braking system execute the optimized control command to realize the safe and efficient integration of intelligent Network team.
所述道路环境信息包括道路坐标系下车队中各车的纵向位置、速度、加速度、轴距。The road environment information includes the longitudinal position, speed, acceleration and wheelbase of each vehicle in the fleet in the road coordinate system.
所述路侧计算单元对存储的数据进行预处理具体为将道路环境信息、自车信息和交通管理信息转化为同一大地坐标系下的数据格式,并计算智能网联车队的车头时距。The roadside calculation unit preprocesses the stored data, specifically converting road environment information, vehicle information and traffic management information into a data format in the same geodetic coordinate system, and calculating the headway of the intelligent networked fleet.
所述路侧计算单元规划车辆汇入智能网联车队的驾驶方案,得到速度引导方案具体为:根据当前时刻待汇入自车的位置、速度、加速度、转角信息,预估自车在前方道路汇入处行驶状态的变化;同时结合即将汇入车道内智能网联车队的状态信息,计算自车期望的汇入时刻、汇入时长以及完成汇入时的末速度,分别得到智能网联车辆和人类驾驶网联车辆的速度引导方案;The roadside calculation unit plans the driving plan for the vehicle to join the intelligent networked fleet, and obtains the speed guidance plan specifically: according to the position, speed, acceleration, and corner information of the own vehicle to be imported at the current moment, it is estimated that the own vehicle is on the road ahead The change of the driving state at the entrance; at the same time, combined with the status information of the intelligent networked vehicle fleet that is about to enter the lane, calculate the expected entrance time, the length of the entrance, and the final speed when the entrance is completed, and obtain the intelligent networked vehicles respectively. and human-driven speed guidance schemes for connected vehicles;
其中,智能网联车辆的速度引导方案为:Among them, the speed guidance scheme of intelligent connected vehicles is:

其中,v0为当前时刻的自车速度,t为全局时间,T为车辆汇入的时长;Among them, v0 is the speed of the vehicle at the current moment, t is the global time, and T is the time for the vehicle to enter;
人类驾驶网联车的速度引导方案为:The speed guidance scheme for human-driven connected vehicles is:

其中,D为车头时距。Among them, D is the headway.
对智能网联车辆,将车载控制器设计为优化控制器,优化控制纵向加速及制动过程,结合车辆实际行驶特性,以车辆纵向加速度为控制对象,将优化控制指令传递至车辆的动力、制动系统,具体为:For intelligent networked vehicles, the on-board controller is designed as an optimized controller to optimize the control of the longitudinal acceleration and braking process. Combined with the actual driving characteristics of the vehicle, the vehicle’s longitudinal acceleration is used as the control object, and the optimized control instructions are transmitted to the vehicle’s power, braking dynamic system, specifically:
8-1)定义基于模型预测控制的规划控制模型,其状态向量和控制向量分别为:8-1) Define the planning control model based on model predictive control, its state vector and control vector are respectively:

其中,k为控制步的下标,x(k)为状态向量,u(k)为控制向量;hk为实际间距,hk*为期望间距,vk为实际速度,vk*为期望速度,ak为加速度;Among them, k is the subscript of the control step, x(k) is the state vector, u(k) is the control vector; hk is the actual distance, hk* is the expected distance, vk is the actual speed, vk* is the expected Velocity, ak is acceleration;
8-2)定义离散化的运动规划动力学方程:8-2) Define the discretized motion planning dynamic equation:
x(k+1)=Akx(k)+Bku(k)+Ckx(k+1)=Ak x(k)+Bk u(k)+Ck
其中,Ak、Bk、Ck为系数矩阵;Among them, Ak , Bk , and Ck are coefficient matrices;
8-3)构建成本函数以及约束条件,得到基于模型预测控制的优化问题:8-3) Construct the cost function and constraint conditions, and obtain the optimization problem based on model predictive control:

s.t.x(k+1)=Akx(k)+Bku(k)+Ckstx(k+1)=Ak x(k)+Bk u(k)+Ck
umin≤u(k)≤umaxumin ≤ u(k) ≤ umax
其中,cost为成本函数,Qk和Pk分别为状态量和控制量的权重矩阵,规划时域为n步;Among them, cost is the cost function, Qk and Pk are the weight matrix of state quantity and control quantity respectively, and the planning time domain is n steps;
8-4)利用二次规划求解器对基于模型预测控制的优化问题进行求解,得到最优控制指令的时间序列,发送至车辆的动力、制动系统。8-4) Use the quadratic programming solver to solve the optimization problem based on model predictive control, obtain the time series of optimal control commands, and send them to the power and braking systems of the vehicle.
一种车辆汇入智能网联车队的控制系统,包括:A control system for vehicles joining an intelligent networked fleet, comprising:
车载传感器,位于待汇入智能网联车队的车辆上,用于感知道路环境信息,识别汇入主车道内前后方的车辆状态,其中,所述车辆包括智能网联车辆和人类驾驶网联车辆;The on-board sensor is located on the vehicle to be merged into the intelligent networked fleet, and is used to sense the road environment information and identify the status of the vehicles in the front and rear of the main lane, wherein the vehicles include intelligent networked vehicles and human-driven networked vehicles ;
交通管理系统,用于获取交通管理信息;traffic management system for obtaining traffic management information;
路侧计算单元,用于执行以下步骤:获取利用V2I技术传输的道路环境信息、待汇入智能网络车队的车辆的自车信息和交通管理信息并进行存储;对存储的数据进行预处理;规划车辆汇入智能网联车队的驾驶方案,得到速度引导方案;通过I2V技术将速度引导方案分别发送至智能网联车辆和人类驾驶网联车辆;The roadside computing unit is used to perform the following steps: obtain and store road environment information transmitted by V2I technology, self-vehicle information and traffic management information of vehicles to be imported into the intelligent network fleet; preprocess the stored data; plan The vehicle is imported into the driving plan of the intelligent networked fleet, and the speed guidance plan is obtained; the speed guidance plan is sent to the intelligent networked vehicle and the human-driven networked vehicle respectively through I2V technology;
控制器,位于待汇入智能网联车队的车辆上,其中,人类驾驶网联车辆的控制器控制人机交互界面显示速度引导方案,为驾驶员提供汇入引导;智能网联车辆的控制器用于根据速度引导方案,优化控制纵向加速及制动过程,得到优化控制指令,车辆动力系统、制动系统执行优化控制指令,实现安全、高效地汇入智能网联车队;The controller is located on the vehicle to be imported into the intelligent networked fleet, wherein, the controller of the human-driven networked vehicle controls the human-computer interaction interface to display the speed guidance scheme, and provides the driver with import guidance; the controller of the intelligent networked vehicle is used for According to the speed guidance scheme, the longitudinal acceleration and braking process is optimized and controlled, and the optimized control command is obtained, and the vehicle power system and braking system execute the optimized control command to realize safe and efficient integration into the intelligent networked fleet;
通信模块,用于实现路侧计算单元和车辆、交通管理系统之间的通信。The communication module is used to realize the communication between the roadside computing unit and the vehicle and the traffic management system.
所述道路环境信息包括道路坐标系下车队中各车的纵向位置、速度、加速度、轴距。The road environment information includes the longitudinal position, speed, acceleration and wheelbase of each vehicle in the fleet in the road coordinate system.
所述路侧计算单元对存储的数据进行预处理具体为将道路环境信息、自车信息和交通管理信息转化为同一大地坐标系下的数据格式,并计算智能网联车队的车头时距。The roadside calculation unit preprocesses the stored data, specifically converting road environment information, vehicle information and traffic management information into a data format in the same geodetic coordinate system, and calculating the headway of the intelligent networked fleet.
所述路侧计算单元规划车辆汇入智能网联车队的驾驶方案,得到速度引导方案具体为:根据当前时刻待汇入自车的位置、速度、加速度、转角信息,预估自车在前方道路汇入处行驶状态的变化;同时结合即将汇入车道内智能网联车队的状态信息,计算自车期望的汇入时刻、汇入时长以及完成汇入时的末速度,分别得到智能网联车辆和人类驾驶网联车辆的速度引导方案;The roadside calculation unit plans the driving plan for the vehicle to join the intelligent networked fleet, and obtains the speed guidance plan specifically: according to the position, speed, acceleration, and corner information of the own vehicle to be imported at the current moment, it is estimated that the own vehicle is on the road ahead The change of the driving state at the entrance; at the same time, combined with the status information of the intelligent networked vehicle fleet that is about to enter the lane, calculate the expected entrance time, the length of the entrance, and the final speed when the entrance is completed, and obtain the intelligent networked vehicles respectively. and human-driven speed guidance schemes for connected vehicles;
其中,智能网联车辆的速度引导方案为:Among them, the speed guidance scheme of intelligent connected vehicles is:

其中,v0为当前时刻的自车速度,t为全局时间,T为车辆汇入的时长;Among them, v0 is the speed of the vehicle at the current moment, t is the global time, and T is the time for the vehicle to enter;
人类驾驶网联车的速度引导方案为:The speed guidance scheme for human-driven connected vehicles is:

其中,D为车头时距。Among them, D is the headway.
对智能网联车辆,将车载控制器设计为优化控制器,优化控制纵向加速及制动过程,结合车辆实际行驶特性,以车辆纵向加速度为控制对象,将优化控制指令传递至车辆的动力、制动系统,具体为:For intelligent networked vehicles, the on-board controller is designed as an optimized controller to optimize the control of the longitudinal acceleration and braking process. Combined with the actual driving characteristics of the vehicle, the vehicle’s longitudinal acceleration is used as the control object, and the optimized control instructions are transmitted to the vehicle’s power, braking dynamic system, specifically:
8-1)定义基于模型预测控制的规划控制模型,其状态向量和控制向量分别为:8-1) Define the planning control model based on model predictive control, its state vector and control vector are respectively:

其中,k为控制步的下标,x(k)为状态向量,u(k)为控制向量;hk为实际间距,hk*为期望间距,vk为实际速度,vk*为期望速度,ak为加速度;Among them, k is the subscript of the control step, x(k) is the state vector, u(k) is the control vector; hk is the actual distance, hk* is the expected distance, vk is the actual speed, vk* is the expected Velocity, ak is acceleration;
8-2)定义离散化的运动规划动力学方程:8-2) Define the discretized motion planning dynamic equation:
x(k+1)=Akx(k)+Bku(k)+Ckx(k+1)=Ak x(k)+Bk u(k)+Ck
其中,Ak、Bk、Ck为系数矩阵;Among them, Ak , Bk , and Ck are coefficient matrices;
8-3)构建成本函数以及约束条件,得到基于模型预测控制的优化问题:8-3) Construct the cost function and constraint conditions, and obtain the optimization problem based on model predictive control:

s.t.x(k+1)=Akx(k)+Bku(k)+Ckstx(k+1)=Ak x(k)+Bk u(k)+Ck
umin≤u(k)≤umaxumin ≤ u(k) ≤ umax
其中,cost为成本函数,Qk和Pk分别为状态量和控制量的权重矩阵,规划时域为n步;Among them, cost is the cost function, Qk and Pk are the weight matrix of state quantity and control quantity respectively, and the planning time domain is n steps;
8-4)利用二次规划求解器对基于模型预测控制的优化问题进行求解,得到最优控制指令的时间序列,发送车辆的动力、制动系统。8-4) Use the quadratic programming solver to solve the optimization problem based on model predictive control, obtain the time sequence of the optimal control command, and send it to the power and braking system of the vehicle.
与现有技术相比,本发明具有以下有益效果:Compared with the prior art, the present invention has the following beneficial effects:
(1)本发明基于车路协同技术,结合汇入目标车道内的智能网联车队状态信息和自车的位置、速度、加速度等信息,通过预测自车汇入时刻、汇入时长以及完成汇入时的末速度,无需研究换道间距模型就能实现对车辆汇入行为的准确控制,为车辆的速度引导或控制提供高可靠性基础,有助于车辆安全、高效汇入。(1) Based on the vehicle-road coordination technology, the present invention combines the state information of the intelligent networked fleet that merges into the target lane and information such as the position, speed, and acceleration of the self-vehicle, and predicts the time when the self-vehicle merges in, the duration of the merge, and the completion Accurate control of vehicle merging behavior can be achieved without studying the lane-changing distance model, which provides a high-reliability basis for vehicle speed guidance or control, and contributes to safe and efficient merging of vehicles.
(2)面向车辆不同的智能化水平,本发明设计了相应决策内容,同时适配高等级智能网联车和普通人类驾驶网联车。对于高等级智能网联车,设计纵向加速度控制指令,将优化的控制指令传递至车辆的控制系统,在车载终端控制执行;对于普通人类驾驶网联车,设计期望车速驾驶引导指令,决策信息被发送到人机交互界面,由人类驾驶员自行完成控制动作,有效解决了应用对象单一、受车辆控制水平限制的问题。(2) For different intelligence levels of vehicles, the present invention designs corresponding decision-making content, and adapts to high-level intelligent connected vehicles and ordinary human-driven connected vehicles at the same time. For high-level intelligent networked vehicles, design longitudinal acceleration control commands, transmit the optimized control commands to the vehicle control system, and control and execute them on the vehicle terminal; for ordinary human-driven connected vehicles, design expected speed driving guidance commands, and decision information Send it to the human-computer interaction interface, and the human driver can complete the control action by himself, effectively solving the problem of single application object and limited by the vehicle control level.
(3)本发明的控制方案的设计变量包括对车速的控制,因此对车辆汇入智能网联车队的控制具有主动性,不会仅依据间距大小等待汇入,而可以灵活的根据速度和间距进行加速赶上车队再完成换道汇入,提高了汇入效率。(3) The design variable of the control scheme of the present invention includes the control of the vehicle speed, so the control of the vehicle's integration into the intelligent networked fleet is proactive, and it will not only wait for the integration according to the size of the distance, but can flexibly according to the speed and distance Accelerate to catch up with the convoy and then complete the lane change and merge, which improves the efficiency of merge.
附图说明Description of drawings
图1为本发明的方法流程图。Fig. 1 is a flow chart of the method of the present invention.
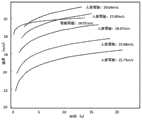
图2为本发明实施例中的两种汇入控制方案的纵向速度曲线示意图。Fig. 2 is a schematic diagram of longitudinal speed curves of two inflow control schemes in the embodiment of the present invention.
具体实施方式Detailed ways
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
本实施例的数据来源于美国联邦公路管理局利用驾驶模拟器试验,有效参与者为156人,划分为3组,所有参与者被要求完成4次的汇入和驶离智能网联车队。第1组无巡航控制功能,车队时距设为0.7s到1.5s,第二组只在车队保持过程中开启智能网联车队控制功能,第三组在整个试验过程中均激活智能网联车队控制功能以控制纵向速度。第2组和第3组的车队时距均设置为1.1s。由于前两组在汇入过程中为人工控制车辆,因此用于分析本发明中的人类驾驶网联车辆的汇入控制,而第3组则对应本发明中的智能网联车辆的汇入控制。The data in this embodiment comes from the US Federal Highway Administration's driving simulator test. There are 156 valid participants, divided into 3 groups, and all participants are required to complete 4 times of entering and leaving the intelligent networked fleet. The first group has no cruise control function, and the fleet time is set from 0.7s to 1.5s. The second group only turns on the intelligent networked fleet control function during the fleet maintenance process, and the third group activates the intelligent networked fleet during the entire test process. Control function to control longitudinal speed. The team time intervals of Group 2 and Group 3 are both set to 1.1s. Since the first two groups are manually controlled vehicles during the import process, they are used to analyze the import control of human-driven connected vehicles in the present invention, while the third group corresponds to the import control of intelligent networked vehicles in the present invention .
本实施例提供一种车辆汇入智能网联车队的控制方法,如图1所示,包括以下步骤:This embodiment provides a control method for a vehicle to join an intelligent networked fleet, as shown in FIG. 1 , including the following steps:
1)获取车载传感器感知到的道路环境信息,识别汇入主车道内前后方的车辆状态。1) Acquire the road environment information sensed by the on-board sensors, and identify the status of the vehicles in the front and rear of the main lane.
所述道路环境信息包括道路坐标系下车队中各车的纵向位置、速度、加速度、轴距。The road environment information includes the longitudinal position, speed, acceleration and wheelbase of each vehicle in the fleet in the road coordinate system.
2)获取待汇入智能网络车队的车辆的自车信息和交通管理信息。2) Obtain the self-vehicle information and traffic management information of the vehicles to be imported into the intelligent network fleet.
3)利用V2I技术将道路环境信息、自车信息和交通管理信息发送至路侧计算单元并存储。3) Use V2I technology to send road environment information, self-vehicle information and traffic management information to the roadside computing unit and store them.
沿路侧纵向一定范围内布设一系列路侧计算单元,其具备交通感知、信息通讯、实时计算等功能,可存储负责区间内路段的特征数据,例如道路拓扑结构、限速等信息。A series of roadside computing units are arranged in a certain range along the longitudinal direction of the roadside, which have functions such as traffic perception, information communication, and real-time computing, and can store characteristic data of the road sections in the responsible section, such as road topology, speed limit and other information.
4)路侧计算单元对存储的数据进行预处理,将道路环境信息、自车信息和交通管理信息转化为同一大地坐标系下的数据格式,并计算智能网联车队的车头时距。4) The roadside computing unit preprocesses the stored data, converts road environment information, self-vehicle information and traffic management information into a data format in the same geodetic coordinate system, and calculates the headway of the intelligent networked fleet.
5)路侧计算单元规划车辆汇入智能网联车队的驾驶方案,得到速度引导方案。5) The roadside computing unit plans the driving plan for the vehicles to join the intelligent network fleet, and obtains the speed guidance plan.
路侧计算单元根据当前时刻待汇入自车的位置、速度、加速度、转角信息,预估自车在前方道路汇入处行驶状态的变化;同时结合即将汇入车道内智能网联车队的状态信息,计算自车期望的汇入时刻、汇入时长以及完成汇入时的末速度,分别得到智能网联车辆和人类驾驶网联车辆的速度引导方案。The roadside calculation unit predicts the change of the driving state of the own vehicle at the entrance of the road ahead according to the position, speed, acceleration, and corner information of the own vehicle to be imported at the current moment; at the same time, it combines the state of the intelligent networked fleet that will be merged into the lane Information, calculate the expected importing time, importing time, and final speed of the self-vehicle, and obtain the speed guidance schemes of intelligent networked vehicles and human-driven networked vehicles respectively.
分别对CACC控制器和人工驾驶进行分析,得到速度引导方案,其中,The CACC controller and manual driving are analyzed respectively, and the speed guidance scheme is obtained, among which,
智能网联车辆的速度引导方案为:The speed guidance scheme of intelligent connected vehicles is as follows:

其中,v0为当前时刻的自车速度,t为全局时间,T为车辆汇入的时长;Among them, v0 is the speed of the vehicle at the current moment, t is the global time, and T is the time for the vehicle to enter;
人类驾驶网联车的速度引导方案为:The speed guidance scheme for human-driven connected vehicles is:

其中,D为车头时距。在本实施例中,为与智能网联车辆在相同时距下比较,此处D取1.1s。Among them, D is the headway. In this embodiment, in order to compare with the ICV at the same time distance, here D is taken as 1.1s.
本实施例中,人类驾驶网联车和智能网联车辆的v0具有统计性差异,如表1所示,单位km/h:In this embodiment, there is a statistical difference between thev0 of the human-driven connected vehicle and the intelligent connected vehicle, as shown in Table 1, the unit is km/h:
表1v0的统计性指标Statistical indicators of Table 1v0
6)路侧计算单元通过I2V技术将速度引导方案分别发送至智能网联车辆和人类驾驶网联车辆。6) The roadside computing unit sends the speed guidance scheme to the intelligent networked vehicle and the human-driven networked vehicle respectively through I2V technology.
7)人类驾驶网联车辆的人机交互界面显示速度引导方案,为驾驶员提供汇入引导。7) The human-computer interaction interface of the human-driven networked vehicle displays the speed guidance scheme to provide the driver with import guidance.
8)智能网联车辆根据速度引导方案,基于自车的优化控制器优化控制纵向加速及制动过程,得到优化控制指令,车辆动力系统、制动系统执行优化控制指令,实现安全、高效地汇入智能网联车队。8) According to the speed guidance scheme, the intelligent networked vehicle optimizes the control of the longitudinal acceleration and braking process based on the optimal controller of the ego vehicle, and obtains the optimal control command. Join the intelligent network fleet.
对智能网联车辆,将车载控制器设计为优化控制器,优化控制纵向加速及制动过程,结合车辆实际行驶特性,以车辆纵向加速度为控制对象,将优化控制指令传递至车辆的动力、制动系统,具体为:For intelligent networked vehicles, the on-board controller is designed as an optimized controller to optimize the control of the longitudinal acceleration and braking process. Combined with the actual driving characteristics of the vehicle, the vehicle’s longitudinal acceleration is used as the control object, and the optimized control instructions are transmitted to the vehicle’s power, braking dynamic system, specifically:
8-1)定义基于模型预测控制的规划控制模型,其状态向量和控制向量分别为:8-1) Define the planning control model based on model predictive control, its state vector and control vector are respectively:

其中,k为控制步的下标,x(k)为状态向量,u(k)为控制向量;hk为实际间距,hk*为期望间距,vk为实际速度,vk*为期望速度,ak为加速度;Among them, k is the subscript of the control step, x(k) is the state vector, u(k) is the control vector; hk is the actual distance, hk* is the expected distance, vk is the actual speed, vk* is the expected Velocity, ak is acceleration;
8-2)定义离散化的运动规划动力学方程:8-2) Define the discretized motion planning dynamic equation:
x(k+1)=Akx(k)+Bku(k)+Ckx(k+1)=Ak x(k)+Bk u(k)+Ck
其中,Ak、Bk、Ck为系数矩阵;Among them, Ak , Bk , and Ck are coefficient matrices;
8-3)构建成本函数以及约束条件,得到基于模型预测控制的优化问题:8-3) Construct the cost function and constraint conditions, and obtain the optimization problem based on model predictive control:

s.t.x(k+1)=Akx(k)+Bku(k)+Ckstx(k+1)=Ak x(k)+Bk u(k)+Ck
umin≤u(k)≤umaxumin ≤ u(k) ≤ umax
其中,cost为成本函数,Qk和Pk分别为状态量和控制量的权重矩阵,规划时域为n步;Among them, cost is the cost function, Qk and Pk are the weight matrix of state quantity and control quantity respectively, and the planning time domain is n steps;
Qk和Pk可根据实际需要主动设定,根据以往经验,提高Qk有利于迅速达到控制目标,而提高Pk有利于减小车辆控制过程中的振荡。Qk and Pk can be actively set according to actual needs. According to past experience, increasing Qk is conducive to quickly reaching the control target, while increasing Pk is conducive to reducing the oscillation in the process of vehicle control.
8-4)利用二次规划求解器对基于模型预测控制的优化问题进行求解,得到最优控制指令的时间序列,发送车辆的动力、制动系统。8-4) Use the quadratic programming solver to solve the optimization problem based on model predictive control, obtain the time sequence of the optimal control command, and send it to the power and braking system of the vehicle.
基于本发明的汇入车队的控制方案,智能网联车辆和人类驾驶网联车辆在汇入过程中的纵向速度变化曲线如图2所示,可以看出智能网联车辆的纵向速度变化率显著高于人类驾驶网联车辆,使其能更快地达到所设定的期望速度。此外,相对于人类驾驶网联车辆,智能网联车辆的平均汇入时长要降低26.9%。因此,智能网联车辆汇入控制的效率将高于人类驾驶网联车辆。Based on the control scheme of the merging fleet of the present invention, the longitudinal speed change curves of the intelligent networked vehicles and human-driven networked vehicles in the process of merging are shown in Figure 2. It can be seen that the longitudinal speed change rate of the intelligent networked vehicles is significant It is faster than humans to drive connected vehicles, enabling them to reach the set desired speed faster. In addition, compared with human-driven connected vehicles, the average import time of intelligent connected vehicles is reduced by 26.9%. Therefore, the efficiency of the inbound control of intelligent connected vehicles will be higher than that of human-driven connected vehicles.
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依据本发明的构思在现有技术的基础上通过逻辑分析、推理、或者有限的实验可以得到的技术方案,皆应在权利要求书所确定的保护范围内。The preferred specific embodiments of the present invention have been described in detail above. It should be understood that those skilled in the art can make many modifications and changes according to the concept of the present invention without creative effort. Therefore, all technical solutions that can be obtained by those skilled in the art based on the concept of the present invention through logical analysis, reasoning, or limited experiments on the basis of the prior art shall be within the scope of protection defined in the claims.
Claims (10)








Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211348153.6ACN115830895A (en) | 2022-10-31 | 2022-10-31 | Control method and system for vehicle to enter intelligent internet motorcade |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211348153.6ACN115830895A (en) | 2022-10-31 | 2022-10-31 | Control method and system for vehicle to enter intelligent internet motorcade |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115830895Atrue CN115830895A (en) | 2023-03-21 |
Family
ID=85525925
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211348153.6APendingCN115830895A (en) | 2022-10-31 | 2022-10-31 | Control method and system for vehicle to enter intelligent internet motorcade |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115830895A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116682252A (en)* | 2023-06-12 | 2023-09-01 | 南京航空航天大学 | A control method for adaptively merging into vehicle platoons for intelligent networked vehicles |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109598950A (en)* | 2018-12-04 | 2019-04-09 | 东南大学 | A kind of the ring road collaboration remittance control method and system of intelligent network connection vehicle |
| CN110379182A (en)* | 2019-07-12 | 2019-10-25 | 同济大学 | One kind being based on the dynamic (dynamical) ring road merging area cooperative control system of bus or train route broad sense |
| DE102018006265A1 (en)* | 2018-08-08 | 2020-02-13 | Psa Automobiles Sa | Method of laying out a vehicle |
| CN113219962A (en)* | 2021-02-26 | 2021-08-06 | 北京航空航天大学合肥创新研究院(北京航空航天大学合肥研究生院) | Control method and system for hybrid queue following safety and storage medium |
| CN113246985A (en)* | 2021-06-21 | 2021-08-13 | 苏州大学 | Intelligent network vehicle merging and changing control method for expressway ramps under mixed-traveling condition |
| WO2021243710A1 (en)* | 2020-06-05 | 2021-12-09 | 曹庆恒 | Intelligent transportation system-based automatic driving method and device, and intelligent transportation system |
| CN113808436A (en)* | 2021-08-31 | 2021-12-17 | 东南大学 | Motorcade control method for off-ramp vehicles to leave intelligent internet dedicated lane |
| CN114241778A (en)* | 2022-02-23 | 2022-03-25 | 东南大学 | Multi-objective optimal control method and system for expressway network-connected vehicle collaborative ramp merge |
| CN114253274A (en)* | 2021-12-24 | 2022-03-29 | 吉林大学 | Data-driven-based online hybrid vehicle formation rolling optimization control method |
| CN114664078A (en)* | 2022-03-18 | 2022-06-24 | 河北工业大学 | Road confluence area cooperation convergence control method based on automatic driving vehicle queue |
| CN114708734A (en)* | 2022-05-07 | 2022-07-05 | 合肥工业大学 | Entrance ramp network connection manual driving vehicle main line converging cooperative control method |
| CN115092139A (en)* | 2022-05-24 | 2022-09-23 | 同济大学 | Intelligent networked vehicle interlacing area collaborative motion planning method |
- 2022
- 2022-10-31CNCN202211348153.6Apatent/CN115830895A/enactivePending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018006265A1 (en)* | 2018-08-08 | 2020-02-13 | Psa Automobiles Sa | Method of laying out a vehicle |
| CN109598950A (en)* | 2018-12-04 | 2019-04-09 | 东南大学 | A kind of the ring road collaboration remittance control method and system of intelligent network connection vehicle |
| CN110379182A (en)* | 2019-07-12 | 2019-10-25 | 同济大学 | One kind being based on the dynamic (dynamical) ring road merging area cooperative control system of bus or train route broad sense |
| WO2021243710A1 (en)* | 2020-06-05 | 2021-12-09 | 曹庆恒 | Intelligent transportation system-based automatic driving method and device, and intelligent transportation system |
| CN113219962A (en)* | 2021-02-26 | 2021-08-06 | 北京航空航天大学合肥创新研究院(北京航空航天大学合肥研究生院) | Control method and system for hybrid queue following safety and storage medium |
| CN113246985A (en)* | 2021-06-21 | 2021-08-13 | 苏州大学 | Intelligent network vehicle merging and changing control method for expressway ramps under mixed-traveling condition |
| CN113808436A (en)* | 2021-08-31 | 2021-12-17 | 东南大学 | Motorcade control method for off-ramp vehicles to leave intelligent internet dedicated lane |
| CN114253274A (en)* | 2021-12-24 | 2022-03-29 | 吉林大学 | Data-driven-based online hybrid vehicle formation rolling optimization control method |
| CN114241778A (en)* | 2022-02-23 | 2022-03-25 | 东南大学 | Multi-objective optimal control method and system for expressway network-connected vehicle collaborative ramp merge |
| CN114664078A (en)* | 2022-03-18 | 2022-06-24 | 河北工业大学 | Road confluence area cooperation convergence control method based on automatic driving vehicle queue |
| CN114708734A (en)* | 2022-05-07 | 2022-07-05 | 合肥工业大学 | Entrance ramp network connection manual driving vehicle main line converging cooperative control method |
| CN115092139A (en)* | 2022-05-24 | 2022-09-23 | 同济大学 | Intelligent networked vehicle interlacing area collaborative motion planning method |
Non-Patent Citations (4)
| Title |
|---|
| "Modeling Maximum Throughput of Freeway Merging Area with Partially Connected Automated Traffic", 《2021 IEEE INTELLIGENT TRANSPORTATION SYSTEMS CONFERENCE (ITSC)》, 25 October 2021 (2021-10-25), pages 3553 - 3557* |
| JIA HU ET AL.: "Modelling merging behaviour joining a cooperative adaptive cruise control platoon", 《IET INTELLIGENT TRANSPORT SYSTEMS》, vol. 14, no. 7, 4 March 2020 (2020-03-04), pages 693 - 701, XP006090987, DOI: 10.1049/iet-its.2019.0378* |
| 张一鸣 等: "基于模型预测控制的卡车编队控制方法与 设计运行域评估", 《交通与运输》, vol. 38, no. 3, 31 May 2022 (2022-05-31), pages 55 - 60* |
| 张子晗 等: "新型混合交通环境下车辆驾驶交互行为建模", 《交通与运输》, vol. 38, no. 5, 30 September 2022 (2022-09-30), pages 13 - 18* |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116682252A (en)* | 2023-06-12 | 2023-09-01 | 南京航空航天大学 | A control method for adaptively merging into vehicle platoons for intelligent networked vehicles |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Bai et al. | Hybrid reinforcement learning-based eco-driving strategy for connected and automated vehicles at signalized intersections | |
| CN108595823B (en) | Autonomous main vehicle lane changing strategy calculation method combining driving style and game theory | |
| CN109501799B (en) | Dynamic path planning method under condition of Internet of vehicles | |
| CN106601002B (en) | Entrance ramp vehicle passing guiding system and method under Internet of vehicles environment | |
| Xiang et al. | A closed-loop speed advisory model with driver's behavior adaptability for eco-driving | |
| Sivanandham et al. | Platooning for sustainable freight transportation: an adoptable practice in the near future? | |
| CN110861650A (en) | Vehicle path planning method and device, vehicle-mounted equipment and storage medium | |
| CN110597245A (en) | Lane-changing trajectory planning method for autonomous driving based on quadratic programming and neural network | |
| Zhang et al. | Green light optimal speed advisory system designed for electric vehicles considering queuing effect and driver’s speed tracking error | |
| CN110304074A (en) | A Hybrid Driving Method Based on Hierarchical State Machine | |
| WO2021102957A1 (en) | Lane keeping method, vehicle-mounted device, and storage medium | |
| CN109493593B (en) | An optimization method of bus running trajectory considering comfort | |
| Qi et al. | Connected cooperative ecodriving system considering human driver error | |
| CN112820126B (en) | A right-of-way priority operation control and simulation method for a non-intrusive guided transport vehicle | |
| CN116740945B (en) | Method and system for multi-vehicle collaborative grouping intersection of expressway confluence region in mixed running environment | |
| CN114559959A (en) | Automatic driving behavior decision system and method based on driving preference | |
| CN113012448A (en) | Intelligent driving system for vehicle distribution formation for solving intersection traffic jam | |
| CN116259185B (en) | Vehicle behavior decision method and device fusing prediction algorithm in parking lot scene | |
| CN113011634A (en) | Intelligent network connection ramp merging method based on distributed optimal control | |
| CN114987538A (en) | Collaborative lane changing method considering multi-objective optimization in internet automatic driving environment | |
| CN111325975A (en) | Centralized optimization coordination method of intelligent networked vehicles in afflux entrance area | |
| CN115273450A (en) | A lane-changing method for vehicles entering a formation in a networked autonomous driving environment | |
| Shan et al. | Developing a novel dynamic bus lane control strategy with eco-driving under partially connected vehicle environment | |
| CN115830895A (en) | Control method and system for vehicle to enter intelligent internet motorcade | |
| Ma et al. | A review of vehicle speed control strategies |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |