CN115771137A - Non-stretching soft exoskeleton based on muscle energy storage - Google Patents
Non-stretching soft exoskeleton based on muscle energy storageDownload PDFInfo
- Publication number
- CN115771137A CN115771137ACN202211543436.6ACN202211543436ACN115771137ACN 115771137 ACN115771137 ACN 115771137ACN 202211543436 ACN202211543436 ACN 202211543436ACN 115771137 ACN115771137 ACN 115771137A
- Authority
- CN
- China
- Prior art keywords
- belt
- human body
- thigh
- force
- waist
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 210000003205muscleAnatomy0.000titleclaimsabstractdescription58
- 238000004146energy storageMethods0.000titleclaimsabstractdescription14
- 210000000689upper legAnatomy0.000claimsabstractdescription67
- 210000001624hipAnatomy0.000claimsabstractdescription49
- 230000007246mechanismEffects0.000claimsabstractdescription34
- 210000002414legAnatomy0.000claimsabstractdescription22
- 210000000629knee jointAnatomy0.000claimsabstractdescription20
- 210000004394hip jointAnatomy0.000claimsabstractdescription8
- 239000000463materialSubstances0.000claimsabstractdescription7
- 210000002683footAnatomy0.000claimsdescription30
- 210000000544articulatio talocruralisAnatomy0.000claimsdescription28
- 238000005381potential energyMethods0.000claimsdescription12
- 239000002184metalSubstances0.000claimsdescription8
- 239000004677NylonSubstances0.000claimsdescription5
- 229920001778nylonPolymers0.000claimsdescription5
- 239000002131composite materialSubstances0.000claimsdescription4
- 235000020938metabolic statusNutrition0.000claimsdescription3
- 238000013480data collectionMethods0.000claims2
- 238000005452bendingMethods0.000claims1
- 244000309466calfSpecies0.000abstractdescription11
- 239000000306componentSubstances0.000description12
- 230000033001locomotionEffects0.000description11
- 238000005265energy consumptionMethods0.000description9
- 230000006872improvementEffects0.000description9
- 230000000694effectsEffects0.000description8
- 210000003141lower extremityAnatomy0.000description8
- 238000006243chemical reactionMethods0.000description5
- 230000007704transitionEffects0.000description5
- 230000005021gaitEffects0.000description4
- 230000002503metabolic effectEffects0.000description4
- 238000000034methodMethods0.000description4
- 230000006978adaptationEffects0.000description3
- 238000010586diagramMethods0.000description3
- 230000037323metabolic rateEffects0.000description3
- 230000008569processEffects0.000description3
- 238000004804windingMethods0.000description3
- 230000005540biological transmissionEffects0.000description2
- 239000008358core componentSubstances0.000description2
- 210000004177elastic tissueAnatomy0.000description2
- 238000005516engineering processMethods0.000description2
- 238000005259measurementMethods0.000description2
- 238000012986modificationMethods0.000description2
- 230000004048modificationEffects0.000description2
- 210000001015abdomenAnatomy0.000description1
- 230000009286beneficial effectEffects0.000description1
- 238000007707calorimetryMethods0.000description1
- 239000000969carrierSubstances0.000description1
- 230000006835compressionEffects0.000description1
- 238000007906compressionMethods0.000description1
- 238000013461designMethods0.000description1
- 210000005069earsAnatomy0.000description1
- 230000037149energy metabolismEffects0.000description1
- 230000006870functionEffects0.000description1
- 230000007774longtermEffects0.000description1
- 210000000056organAnatomy0.000description1
- 210000004197pelvisAnatomy0.000description1
- 230000008447perceptionEffects0.000description1
- 230000036316preloadEffects0.000description1
- 238000011160researchMethods0.000description1
- 230000004044responseEffects0.000description1
- 230000035807sensationEffects0.000description1
- 210000001519tissueAnatomy0.000description1
- 238000012546transferMethods0.000description1
Images







Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0006—Exoskeletons, i.e. resembling a human figure
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/1075—Programme-controlled manipulators characterised by positioning means for manipulator elements with muscles or tendons
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/16—Mechanical energy storage, e.g. flywheels or pressurised fluids
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Rheumatology (AREA)
- Professional, Industrial, Or Sporting Protective Garments (AREA)
- Footwear And Its Accessory, Manufacturing Method And Apparatuses (AREA)
- Rehabilitation Tools (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于穿戴服饰技术领域,具体涉及基于肌肉储能的非拉伸软性外骨骼。The invention belongs to the technical field of clothing, and in particular relates to a non-stretching soft exoskeleton based on muscle energy storage.
背景技术Background technique
外骨骼,是穿戴在使用者身体外部的一种机械机构,可将人体感觉、思维、运动等器官与机器的感知系统,智能处理中心,控制执行系统相结合,从而达到改善人体物理机能及提供身体素质等目的。近年来,科研人员试图利用主动设备去驱动人体下肢,以达成降低人体行走过程中的能量代谢。然而,主动外骨骼的设备,如电机和电池,会向人体增加质量。很大一部分的辅助作用被增加的质量造成的代谢代价所消耗。于是,不少研究者转向被动外骨骼,被动外骨骼基于肌肉储能的机理,即储存然后返回机械功,在没有外部能源的情况下实现辅助。得益于被动外骨骼不需要任何主动设备,且整体结构更为轻量化和简单,被动外骨骼的研究在步行辅助装备领域中显得尤为重要。An exoskeleton is a mechanical mechanism worn outside the user's body. It can combine human body sensation, thinking, movement and other organs with the machine's perception system, intelligent processing center, and control execution system, so as to improve the physical function of the human body and provide Physical fitness and other purposes. In recent years, researchers have tried to use active devices to drive the lower limbs of the human body to reduce energy metabolism during human walking. However, the equipment of active exoskeletons, such as motors and batteries, add mass to the human body. A large part of the ancillary effect is consumed at the metabolic cost of the added mass. As a result, many researchers have turned to passive exoskeletons, which are based on the mechanism of muscle energy storage, that is, storing and returning mechanical work to achieve assistance without external energy. Thanks to the fact that passive exoskeletons do not require any active equipment, and the overall structure is lighter and simpler, the research on passive exoskeletons is particularly important in the field of walking aids.
现有技术中,如公开号为CN111658446A的中国专利提供了一种嵌入式无源助行外骨骼机器人裤,该裤子由嵌入式弹性装置、腰部固定器、可调节式踩脚部分和载体裤子组成。该嵌入式无源助行外骨骼机器人裤采用弹性装置作为其核心元件,来负责动能和弹性势能之间的转换,虽然一定程度上达到了助力行走的功能。但是,金属弹簧等元件的设置有碍被动外骨骼的助力性能的体现,且对穿戴舒适性也有一定的影响;同时,该外骨骼机器人裤需要通过绑带或紧身衣之类的手段紧贴在人的躯体上,穿戴过程相当繁琐,且穿戴服饰需要根据使用者的身高体型进行量身定制,适用性较差。针对以上问题,我们发现人体的组织是柔性的,当压迫人体肌肉组织时,呈现出一个弹性单元的刚度性质。而被动外骨骼的核心元件就是采用合适的弹性单元来负责动能和弹性势能之间的转换,如大部分被动外骨骼用的金属弹簧。In the prior art, the Chinese patent with publication number CN111658446A provides a kind of embedded passive walking aid exoskeleton robot pants, which are composed of embedded elastic device, waist fixer, adjustable foot part and carrier pants. The embedded passive walking-assisted exoskeleton robot pants use elastic devices as its core components to be responsible for the conversion between kinetic energy and elastic potential energy, although it has achieved the function of assisting walking to a certain extent. However, the setting of components such as metal springs hinders the performance of the power-assisted performance of the passive exoskeleton, and also has a certain impact on the wearing comfort; at the same time, the exoskeleton robot pants need to be tightly attached to the body through straps or tights. On the human body, the wearing process is quite cumbersome, and the wearing clothing needs to be tailored according to the height and shape of the user, which is poor in applicability. In response to the above problems, we found that the tissue of the human body is flexible, and when the human muscle tissue is compressed, it presents the stiffness property of an elastic unit. The core component of the passive exoskeleton is to use a suitable elastic unit to be responsible for the conversion between kinetic energy and elastic potential energy, such as the metal spring used in most passive exoskeletons.
因此,有必要借助肌肉组织的刚度性质,来代替被动外骨骼的金属弹簧,并提供一种无需依托服饰载体的非拉伸软性外骨骼,以减少人们运动过程中代谢能量的消耗。Therefore, it is necessary to use the stiffness properties of muscle tissue to replace the metal springs of the passive exoskeleton, and provide a non-stretch soft exoskeleton that does not need to rely on clothing carriers to reduce the consumption of metabolic energy during people's exercise.
发明内容Contents of the invention
针对相关技术中的问题,本发明提出基于肌肉储能的非拉伸软性外骨骼,以克服现有相关技术所存在的上述技术问题。Aiming at the problems in the related technologies, the present invention proposes a non-stretching soft exoskeleton based on muscle energy storage to overcome the above-mentioned technical problems in the existing related technologies.
本发明的技术方案是这样实现的:基于肌肉储能的非拉伸软性外骨骼,包括腰带、大腿织带和小腿-足组件,The technical solution of the present invention is achieved in this way: a non-stretchable soft exoskeleton based on muscle energy storage, including a waist belt, thigh webbing and calf-foot components,
所述大腿织带包括设于大腿肌肉前侧的第一附接元件,以及设于小腿肌肉后侧的第二附接元件,两附接元件之间沿腿部的两侧呈线型连接有至少两条受力带,各受力带跨越人体的膝关节,呈现包夹住大腿肌肉的形状,所述受力带采用不可拉伸的柔性材料;The thigh webbing includes a first attachment element arranged on the front side of the thigh muscle, and a second attachment element arranged on the back side of the calf muscle, and the two attachment elements are linearly connected along both sides of the leg at least Two force-bearing belts, each force-bearing belt spans the knee joint of the human body, and presents a shape that wraps the thigh muscles, and the force-bearing belts are made of non-stretchable flexible materials;
所述腰带束缚在人体的髋关节之上,与所述第一附接元件相连,所述小腿-足组件设于人体小腿与脚底的交接处,与所述第二附接元件相连;The waist belt is bound on the hip joint of the human body and connected to the first attachment element, and the calf-foot assembly is arranged at the intersection of the human calf and the sole of the foot and is connected to the second attachment element;
在站立状态时,大腿织带的两附接元件之间沿腿部表面呈离心拉伸,大腿肌肉被所述受力带夹迫,存储弹性势能,并在踝关节处施加向上的辅助力矩,当人体下肢预摆动时,受力带快速缩短,大腿肌肉的弹性势能释放。In the standing state, the thigh webbing is stretched centrifugally along the surface of the leg between the two attachment elements, the thigh muscle is clamped by the force belt, stores elastic potential energy, and exerts an upward auxiliary moment at the ankle joint, when When the lower limbs of the human body pre-swing, the stress belt shortens rapidly, and the elastic potential energy of the thigh muscles is released.
在本发明中,基于肌肉储能的机理,在没有外部能源的情况下实现辅助步行,将被动外骨骼抽象成腰带、大腿织带和小腿-足组件,实现穿戴结构的轻量化以及保证穿戴时的舒适性。In the present invention, based on the mechanism of muscle energy storage, assisted walking can be realized without external energy sources, and the passive exoskeleton is abstracted into waist belt, thigh webbing and calf-foot components, so as to realize the lightweight of the wearing structure and ensure the wearability of the wearing structure. comfort.
作为以上方案的进一步改进,所述第一附接元件、第二附接元件被构造成具有开口的绑带结构,对应套接固定在人体腿部肌肉上,开口处采用魔术贴、子母扣或拉链相互闭合;As a further improvement of the above solution, the first attachment element and the second attachment element are configured as strap structures with openings, which are correspondingly sleeved and fixed on the human leg muscles, and Velcro and snap-in buckles are used at the openings or zippers to close each other;
需要说明的是,传统的该外骨骼机器人裤需要通过绑带或紧身衣之类的手段紧贴在人的躯体上,穿戴过程相当繁琐,且穿戴服饰需要根据使用者的身高体型进行量身定制,适用性较差;进一步的,本非拉伸软性外骨骼通过腰带、大腿织带和小腿-足组件与人体对应部位紧固配合,即可完成外骨骼的穿戴作业,无需他人协助穿戴,使用方便。It should be noted that the traditional exoskeleton robot pants need to be attached to the human body by means of straps or tights. The wearing process is quite cumbersome, and the clothing needs to be tailored according to the user's height and shape. , the applicability is poor; further, the non-stretch soft exoskeleton can be fastened with the corresponding parts of the human body through the waist belt, thigh webbing and calf-foot components, and the wearing operation of the exoskeleton can be completed without the assistance of others. convenient.
作为以上方案的进一步改进,所述受力带的上、下两段分别与腿部肌肉呈贴身设置;在人体矢状面的投影上,受力带的中段经过人体膝关节侧面的中心点,当人处于站立状态时,受力带的中段贴合人体膝关节的侧面肌肉,当人的膝关节做弯曲动作时,受力带的中段呈松弛状变化。As a further improvement of the above scheme, the upper and lower sections of the stressed belt are arranged next to the leg muscles respectively; on the projection of the sagittal plane of the human body, the middle section of the stressed belt passes through the center point of the side of the knee joint of the human body, When a person is in a standing state, the middle section of the force-bearing belt fits the side muscles of the knee joint of the human body. When the human knee joint is bent, the middle section of the force-bearing belt changes loosely.
作为以上方案的进一步改进,所述腰带的两侧自人体后腰处斜向双腿前侧延伸,形成两斜接带,所述斜接带分别与第一附接元件形成可调距离的连接,在人体的矢状面投影上,斜接带与两附接元件的连线相交,形成夹角α,95°≤α≤175°;As a further improvement of the above solution, the two sides of the waist belt extend obliquely from the back waist of the human body to the front side of the legs, forming two mitered belts, and the mitered belts are respectively connected with the first attachment element to form an adjustable distance , on the sagittal plane projection of the human body, the miter strip intersects with the line connecting the two attachment elements to form an included angle α, 95°≤α≤175°;
需要说明的是,腰带和小腿-足组件分别连接在大腿织带的上、下两端,用于将大腿织带的作用力传递到后腰和脚跟的接合面上。这两个部位都是弹性组织较薄的,加之接合面都被设计为受压力而不是剪切力,确保了充足的外骨骼刚度和舒适性。同时,为了防止大腿织带上的拉伸力对膝关节形成力矩,避免对膝关节运动的干扰,大腿织带与斜接带的夹角被有意地设置成大钝角,减少两侧拉伸力的合力对大腿的压迫,大大降低了非拉伸软性外骨骼对髋关节的外部影响。It should be noted that the waist belt and the calf-foot assembly are respectively connected to the upper and lower ends of the webbing of the thigh, and are used to transfer the force of the webbing of the thigh to the joint surface of the back waist and the heel. Both of these parts are relatively thin elastic tissue, and the joint surfaces are designed to be compressed rather than sheared, ensuring sufficient exoskeleton stiffness and comfort. At the same time, in order to prevent the stretching force on the thigh webbing from forming a moment on the knee joint and avoid interference with the movement of the knee joint, the angle between the thigh webbing and the miter strap is intentionally set to a large obtuse angle to reduce the resultant force of the stretching force on both sides The compression of the thigh greatly reduces the external impact of the non-stretch soft exoskeleton on the hip joint.
作为以上方案的进一步改进,各大腿织带上的受力带具有两条,两受力带在两附接元件之间分别从腿部两侧呈直线连接,形成自然延伸角度范围β,30°≤β≤40°;As a further improvement of the above scheme, there are two force-bearing belts on each leg webbing, and the two force-bearing belts are connected in a straight line from both sides of the legs between the two attachment elements, forming a natural extension angle range β, 30°≤ β≤40°;
需要说明的是,本非拉伸软性外骨骼主要是基于肌肉储能的原理,将人体的大腿肌肉组织视为一个“弹性单元”,利用其刚度性质,通过从腿部两侧呈直线连接的受力带夹迫大腿肌肉,储存弹性势能,从而产生辅助力矩。进一步的,两受力带形成的延伸角度不同,所提供大腿肌肉夹迫力则不同,配置合理的延伸夹角,可以有效达到穿戴舒适性与助力性能之间的平衡,提高穿戴者的穿戴体验。It should be noted that this non-stretchable soft exoskeleton is mainly based on the principle of muscle energy storage. The thigh muscle tissue of the human body is regarded as an "elastic unit". The force band pinches the thigh muscles, stores elastic potential energy, and generates auxiliary torque. Furthermore, the extension angles formed by the two force belts are different, and the thigh muscle clamping force provided is different. A reasonable extension angle can effectively achieve a balance between wearing comfort and power-assisted performance, and improve the wearing experience of the wearer.
作为以上方案的进一步改进,所述腰带呈环状结构,包括设于腰部后半圈的后腰线,以及设于腰部前半圈的前腰线,所述后腰线采用不可拉伸的柔性材料,所述前腰线采用具有弹性的伸缩带,所述前腰线处还设有收紧机构,用于收紧伸缩带;As a further improvement of the above solution, the waist belt is in a ring structure, including a back waistline set in the back half circle of the waist, and a front waistline set in the front half circle of the waist, and the back waistline is made of non-stretchable flexible material , the front waistline adopts an elastic stretch belt, and the front waistline is also provided with a tightening mechanism for tightening the stretch belt;
所述收紧机构包括分设在人体腰部两侧的第一束缚带和第二束缚带,第一束缚带与第二束缚带通过魔术贴、磁吸或卡扣配合固定;或,The tightening mechanism includes a first restraint belt and a second restraint belt respectively arranged on both sides of the waist of the human body, and the first restraint belt and the second restraint belt are fixed by Velcro, magnetic attraction or snap fit; or,
所述收紧机构包括分设在人体腰部两侧的第一绑绳和第二绑绳,第一绑绳、第二绑绳相互打结固定。The tightening mechanism includes a first binding rope and a second binding rope respectively arranged on both sides of the waist of the human body, and the first binding rope and the second binding rope are fixed by knotting each other.
作为以上方案的进一步改进,所述第二附接元件与小腿-足组件之间设有张紧机构,所述张紧机构包括日字扣和棘轮松紧器,所述棘轮松紧器的一端通过日字扣与受力带相连,另一端通过一柔性元件与小腿-足组件形成可调间距的连接;As a further improvement of the above solution, a tensioning mechanism is provided between the second attachment element and the calf-foot assembly, the tensioning mechanism includes a sun-shaped buckle and a ratchet elastic, and one end of the ratchet elastic passes through the The word buckle is connected with the force belt, and the other end forms an adjustable distance connection with the calf-foot assembly through a flexible element;
需要说明的是,若要减少体能消耗的功效越好,受力带的所提供作用力就要相应增大,则会导致紧绷的不适感越严重,舒适性较差;进一步的,为了有效调节人处于站立状态时受力带所提供的预紧力大小,设置棘轮松紧器进行张紧调节,可大大改善穿戴者的穿戴体验。It should be noted that if the effect of reducing physical energy consumption is better, the force provided by the force belt will increase accordingly, which will lead to more severe discomfort and poorer comfort; further, in order to effectively Adjusting the pre-tightening force provided by the force belt when the person is in a standing state, and setting the ratchet elastic to adjust the tension can greatly improve the wearing experience of the wearer.
所述小腿-足组件为一脚套,所述脚套包裹在人体的踝关节上,脚套的上部沿小腿后侧延伸,并与所述柔性元件相连,受力带通过作用在脚套上,为踝关节的转动施加辅助力矩;采用柔性构造的脚套可大大提高非拉伸软性外骨骼的穿戴舒适性,且其穿戴独立,无需鞋子等其他介质作适配,结构轻巧简便。The calf-foot assembly is a foot cover, the foot cover is wrapped on the ankle joint of the human body, the upper part of the foot cover extends along the rear side of the calf, and is connected with the flexible element, and the force belt acts on the foot cover through , to apply auxiliary torque for the rotation of the ankle joint; the foot cover with flexible structure can greatly improve the wearing comfort of the non-stretch soft exoskeleton, and it can be worn independently without shoes or other media for adaptation, and the structure is light and simple.
或,所述小腿-足组件为一鞋跟扣,所述鞋跟扣与鞋子套合固定,所述鞋跟扣沿背离足跟处延伸有一加长力臂,鞋跟扣通过所述加长力臂与所述柔性元件相连,受力带通过作用在鞋跟扣上,为踝关节的转动施加辅助力矩;为更好地提高辅助性能,进一步地,在踝关节处设置加长力臂,在同样的助力大小情况下,可以达到2倍以上的功效,辅助性能倍增,效果显著。Or, the calf-foot assembly is a heel buckle, the heel buckle is fit and fixed with the shoe, the heel buckle extends away from the heel with an extended force arm, and the heel buckle passes through the lengthened force arm Connected with the flexible element, the force belt acts on the heel buckle to apply auxiliary torque for the rotation of the ankle joint; in order to better improve the auxiliary performance, further, an extended moment arm is set at the ankle joint, and in the same In the case of the size of the assist, it can achieve more than 2 times the effect, and the assist performance is doubled, and the effect is remarkable.
作为以上方案的进一步改进,非拉伸软性外骨骼上设置多个数据采集模块,各数据采集模块分设在穿戴者的人体各部位,或独立于外骨骼之外设置,用于采集穿戴者的运动状态数据或代谢状况数据,并反馈至一上位机展示;As a further improvement of the above scheme, multiple data acquisition modules are set on the non-stretch soft exoskeleton, and each data acquisition module is set separately on each part of the wearer's body, or is set independently of the exoskeleton, and is used to collect the wearer's Exercise status data or metabolic status data, and feed back to a host computer for display;
需要说明的是,非拉伸软性外骨骼所提供的辅助力矩对于减少穿戴者代谢能耗的成效影响颇大。然而,由于大腿织带的三维拓扑结构以及大腿肌肉弹性势能的复杂性,很难通过计算得出非拉伸软性外骨骼的刚度以及它对踝关节的辅助力矩轮廓。进一步,设置多个数据采集模块采集穿戴者的运动状态数据,通过获取的运动状态数据对应调节辅助力矩的大小,有效减少了人体步行时的体能消耗。It should be noted that the auxiliary torque provided by the non-stretch soft exoskeleton has a great influence on the effectiveness of reducing the wearer's metabolic energy consumption. However, due to the three-dimensional topology of the thigh webbing and the complexity of the elastic potential energy of the thigh muscles, it is difficult to calculate the stiffness of the non-stretch soft exoskeleton and its auxiliary moment profile to the ankle joint. Furthermore, a plurality of data acquisition modules are set to collect the motion state data of the wearer, and the size of the auxiliary torque is adjusted correspondingly through the obtained motion state data, which effectively reduces the physical energy consumption of the human body during walking.
作为以上方案的进一步改进,各大腿织带上的两两受力带之间连接有若干条分支带。As a further improvement of the above scheme, several branch belts are connected between two stress-bearing belts on the webbing belts of each thigh.
作为以上方案的进一步改进,所述受力带为尼龙带、绑带、金属线或复合材料织带。As a further improvement of the above solution, the stressed belt is a nylon belt, a binding belt, a metal wire or a composite webbing.
本发明的有益效果:Beneficial effects of the present invention:
(1)基于肌肉储能的机理,在没有外部能源的情况下实现辅助步行,将被动外骨骼抽象成腰带、大腿织带和小腿-足组件,实现穿戴结构的轻量化以及保证穿戴时的舒适性;在步行中,人体下肢摆动会牵引传力路径的拉伸,导致大腿肌肉被夹迫,形成弹力,从而在踝关节处形成向上的助力帮助人体蹬脚离地,有效减少了人体步行时的体能消耗;(1) Based on the mechanism of muscle energy storage, assisted walking can be realized without external energy sources, and the passive exoskeleton is abstracted into waist belt, thigh webbing and calf-foot components, so as to realize the lightweight of the wearing structure and ensure the comfort when wearing ; During walking, the swing of the lower limbs of the human body will pull the stretching of the force transmission path, causing the thigh muscles to be pinched to form elastic force, thereby forming an upward boost at the ankle joint to help the human body kick off the ground, effectively reducing the human body's walking force. physical exertion;
(2)无需依托服饰进行穿戴,不需要为不同个体量身定做,适用群体广泛,且软性外骨骼轻便的特点也使其更适合长时间穿戴,应用前景相当显著;(2) There is no need to rely on clothing to wear, and it does not need to be tailored for different individuals. It is applicable to a wide range of groups, and the light weight of the soft exoskeleton also makes it more suitable for long-term wear. The application prospect is quite significant;
(3)通过腰带、大腿织带和小腿-足组件与人体对应部位紧固配合,即可完成外骨骼的穿戴作业,无需他人协助穿戴,使用方便。(3) The wearing operation of the exoskeleton can be completed through fastening and matching of the belt, thigh webbing and calf-foot components with the corresponding parts of the human body, without the assistance of others, and it is convenient to use.
附图说明Description of drawings
图1是本发明的实施例1的结构示意图;Fig. 1 is the structural representation of
图2是本发明的实施例1的穿戴者处于站立状态时的示意图;Fig. 2 is a schematic diagram when the wearer of
图3是本发明的实施例1的立体图;Fig. 3 is the perspective view of
图4是本发明的实施例1的鞋跟扣与张紧机构的连接示意图;Fig. 4 is a schematic diagram of the connection between the heel buckle and the tensioning mechanism in
图5是本发明的实施例1的鞋跟扣的结构示意图;Fig. 5 is a schematic structural view of the heel buckle of
图6是本发明的实施例1的鞋跟扣的俯视图;Fig. 6 is a top view of the heel buckle of
图7是本发明的实施例1的穿戴者步态周期与辅助力矩的关系示意图;Fig. 7 is a schematic diagram of the relationship between the wearer's gait cycle and the auxiliary torque in
图8是本发明的实施例2的脚套的结构示意图;Fig. 8 is a schematic structural view of the foot cover of
附图标记:Reference signs:
J1、第一附接元件;J2、第二附接元件;J1, first attachment element; J2, second attachment element;
1、腰带;11、收紧机构;12、日字扣;1. Belt; 11. Tightening mechanism; 12. Japanese buckle;
2、大腿织带;21、受力带;22、斜接带;2. Thigh ribbon; 21. Stress belt; 22. Mitered belt;
3、小腿-足组件;31、张紧机构;311、棘轮松紧器;3. Calf-foot assembly; 31. Tension mechanism; 311. Ratchet elastic device;
K1、绕带孔;K2、穿带孔;K1, belt winding hole; K2, belt threading hole;
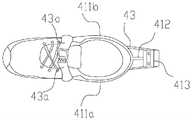
4、鞋跟扣;41、鞋后支架;411、夹持部;411a、左抱臂;411b、右抱臂;412、加长力臂;413、过渡块;414、凸缘;4, heel buckle; 41, shoe rear bracket; 411, clamping part; 411a, left arm; 411b, right arm; 412, extended arm; 413, transition block; 414, flange;
42、柔性元件;42. Flexible components;
43、绷紧机构;43a、左织带;43b、右织带;43, tightening mechanism; 43a, left webbing; 43b, right webbing;
5、脚套;51、脚套主体;52、绑紧机构;52a、第一绑紧带;52b、第二绑紧带;53、连接部。5. foot cover; 51. main body of the foot cover; 52. fastening mechanism; 52a. first fastening belt; 52b. second fastening belt; 53. connecting part.
具体实施方式Detailed ways
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
实施例1Example 1
如图1-图7所示,基于肌肉储能的非拉伸软性外骨骼,包括腰带1、大腿织带2和小腿-足组件3,As shown in Figure 1-7, the non-stretch soft exoskeleton based on muscle energy storage includes a
所述大腿织带2包括设于大腿肌肉前侧的第一附接元件J1,以及设于小腿肌肉后侧的第二附接元件J2,两附接元件之间沿腿部的两侧呈线型连接有至少两条受力带21,各受力带21跨越人体的膝关节,呈现包夹住大腿肌肉的形状,所述受力带21采用不可拉伸的柔性材料;具体的,所述受力带21为尼龙带、绑带、金属线或复合材料织带,在本实施例中,优先选用尼龙带。The
所述腰带1束缚在人体的髋关节之上,与所述第一附接元件J1相连,在本实施例中,所述腰带1呈环状结构,包括设于腰部后半圈的后腰线,以及设于腰部前半圈的前腰线,所述后腰线采用不可拉伸的柔性材料,所述前腰线采用具有弹性的伸缩带,所述前腰线处还设有收紧机构11,用于收紧伸缩带;所述收紧机构11包括分设在人体腰部两侧的第一束缚带和第二束缚带,第一束缚带与第二束缚带通过魔术贴、磁吸或卡扣配合固定;或,所述收紧机构11包括分设在人体腰部两侧的第一绑绳和第二绑绳,第一绑绳、第二绑绳相互打结固定。The
所述小腿-足组件3设于人体小腿与脚底的交接处,与所述第二附接元件J2相连;The calf-
在本实施例中,所述第二附接元件J2与小腿-足组件3之间设有张紧机构31,所述张紧机构31包括日字扣12和棘轮松紧器311,所述棘轮松紧器311的一端通过日字扣12与受力带21相连,受力带21绕设在所述日字扣12上,通过所述日字扣12调整长度。另一端通过一柔性元件42与小腿-足组件3形成可调间距的连接;需要说明的是,若要减少体能消耗的功效越好,受力带21的所提供作用力就要相应增大,则会导致紧绷的不适感越严重,舒适性较差;进一步的,为了有效调节人处于站立状态时受力带21所提供的预紧力大小,设置棘轮松紧器311进行张紧调节,可大大改善穿戴者的穿戴体验。在本实施例中,所受柔性元件42为金属线、尼龙带、绑带或复合材料线性织带,具体的,优先选用金属线作为柔性元件42。In this embodiment, a
在本实施例中,所述第一附接元件J1、第二附接元件J2被构造成具有开口的绑带结构,对应套接固定在人体腿部肌肉上,开口处采用魔术贴、子母扣或拉链相互闭合;需要说明的是,传统的该外骨骼机器人裤需要通过绑带或紧身衣之类的手段紧贴在人的躯体上,穿戴过程相当繁琐,且穿戴服饰需要根据使用者的身高体型进行量身定制,适用性较差;进一步的,本非拉伸软性外骨骼通过腰带1、大腿织带2和小腿-足组件3与人体对应部位紧固配合,即可完成外骨骼的穿戴作业,无需他人协助穿戴,使用方便。In this embodiment, the first attachment element J1 and the second attachment element J2 are configured as strap structures with openings, which are correspondingly sleeved and fixed on the human leg muscles, and the openings are made of Velcro, mother-in-law The buttons or zippers are closed with each other; it should be noted that the traditional exoskeleton robot pants need to be attached to the human body by straps or tights. The height and body type are tailored, and the applicability is poor; further, the non-stretch soft exoskeleton can be fastened with the corresponding parts of the human body through the
在本实施例中,所述受力带21的上、下两段分别与腿部肌肉呈贴身设置;在人体矢状面的投影上,受力带21的中段经过人体膝关节侧面的中心点,当人处于站立状态时,受力带21的中段贴合人体膝关节的侧面肌肉,当人的膝关节做弯曲动作时,受力带21的中段呈松弛状变化。In this embodiment, the upper and lower sections of the stressed
这里引入人体下肢生理学结构的专业术语,矢状面(sagittal plane)经过身体中心(肚脐和脊椎等中线),是划分左右的重要解剖面。冠状面(frontal plane)经过双耳,是将身体分成腹侧和背侧(腹部和背部)的平面。水平面(horizontal plane)又称横断面,该平面正交与冠状面和矢状面,将身体分成上下两部分。Here we introduce the technical terms of the physiological structure of the lower limbs of the human body. The sagittal plane passes through the center of the body (the midline such as the navel and the spine), and is an important anatomical plane that divides the left and right. The frontal plane passes through the ears and is the plane that divides the body into ventral and dorsal (abdomen and back). The horizontal plane, also known as the transverse plane, is orthogonal to the coronal and sagittal planes and divides the body into upper and lower parts.
在本实施例中,所述腰带1的两侧自人体后腰处斜向双腿前侧延伸,形成两斜接带22,所述斜接带22分别与第一附接元件J1形成可调距离的连接,具体的,斜接带22绕设在日字扣12上,通过所述日字扣12与第一附接元件J1相连,通过日字扣12对应调整长度。在人体的矢状面投影上,斜接带22与两附接元件的连线相交,形成夹角α,95°≤α≤175°;在本实施例中,所述夹角α可以为100°、115°、130°、145°、160°或175°。In this embodiment, the two sides of the
需要说明的是,腰带1和小腿-足组件3分别连接在大腿织带2的上、下两端,用于将大腿织带2的作用力传递到后腰和脚跟的接合面上。这两个部位都是弹性组织较薄的,加之接合面都被设计为受压力而不是剪切力,确保了充足的外骨骼刚度和舒适性。同时,为了防止大腿织带2上的拉伸力对膝关节形成力矩,避免对膝关节运动的干扰,大腿织带2与斜接带22的夹角被有意地设置成大钝角,减少两侧拉伸力的合力对大腿的压迫,大大降低了非拉伸软性外骨骼对髋关节的外部影响。It should be noted that the
在本实施例中,各大腿织带2上的受力带21具有两条,两受力带21在两附接元件之间分别从腿部两侧呈直线连接,形成自然延伸角度范围β,30°≤β≤40°;In this embodiment, there are two force-bearing
需要说明的是,本非拉伸软性外骨骼主要是基于肌肉储能的原理,将人体的大腿肌肉组织视为一个“弹性单元”,利用其刚度性质,通过从腿部两侧呈直线连接的受力带21夹迫大腿肌肉,储存弹性势能,从而产生辅助力矩。进一步的,两受力带21形成的延伸角度不同,所提供大腿肌肉夹迫力则不同,配置合理的延伸夹角,可以有效达到穿戴舒适性与助力性能之间的平衡,提高穿戴者的穿戴体验。It should be noted that this non-stretchable soft exoskeleton is mainly based on the principle of muscle energy storage. The thigh muscle tissue of the human body is regarded as an "elastic unit". The
在本实施例中,所述小腿-足组件3为一鞋跟扣4,所述鞋跟扣4与鞋子套合固定,所述鞋跟扣4沿背离足跟处延伸有一加长力臂412,鞋跟扣4通过所述加长力臂412与所述柔性元件42相连,受力带21通过作用在鞋跟扣4上,为踝关节的转动施加辅助力矩;为更好地提高辅助性能,进一步地,在踝关节处设置加长力臂412,在同样的助力大小情况下,可以达到2倍以上的功效,辅助性能倍增,效果显著。In this embodiment, the calf-
具体的,包括:鞋后支架41,所述鞋后支架41包括夹持部411,所述夹持部411呈双手抱合状夹持在鞋子的后侧,与鞋子的后侧型状相适配,所述夹持部411背离鞋子的一侧向外延伸形成一加长力臂412;还包括一绷紧机构43,用于将所述鞋后支架41固定在鞋子上。Specifically, it includes: a shoe
进一步具体的,所述鞋后支架41整体呈“Y”型结构,所述夹持部411包括呈镜像对称的左抱臂411a和右抱臂411b,左抱臂411a、右抱臂411b朝向鞋头的一端分布有若干个绕带孔K1,左抱臂411a、右抱臂411b背离鞋头的一端相互固结,并与所述加长力臂412相接;为了适配不同码数的脚掌大小,在鞋后支架41上配置若干个绕带孔K1,可以根据实际紧固需求,对应调整绕带需求。More specifically, the shoe
在本实施例中,所述加长力臂412延伸的末端安装有一过渡块413,所述过渡块413的侧壁上设有呈对穿设置的穿带孔K2,所述穿带孔K2的对穿距离小于鞋子的宽度尺寸,所述过渡块413的顶部设有一凸缘414,加长力臂412通过所述凸缘414与柔性元件42相连;需要说明的是,设置穿带孔K2的对穿距离小于鞋子的宽度尺寸,可以使得绷紧机构43完全包裹鞋底,确保鞋后支架41与鞋子的连接紧固。In this embodiment, a
在本实施例中,所述绷紧机构43为一线性织带,所述线性织带的前段穿过所述穿带孔K2,分别朝向鞋底延伸,线性织带的中段沿鞋底延伸,并外扩至鞋的两侧壁,线性织带的后段沿鞋的两侧壁爬升,经过所述绕带孔K1后,汇合至鞋面处相互紧固;需要说明的是,本鞋跟扣4采用线性织带实现鞋后支架41与鞋子的紧固连接,方便快捷,连接牢靠,且线性织带整体韧性较好,不会对人体的踝关节造成额外的载荷负担。In this embodiment, the
具体的,所述绷紧机构43在鞋面处分成左织带43a和右织带43b,左织带43a与右织带43b通过魔术贴、子母扣或绳结相互紧固;具体的,子母扣扣合操作简单,连接牢固,优先选用子母扣作为绷紧机构43的紧固连接件。Specifically, the
在本实施例中,所述鞋后支架41所在的平面穿过人体踝关节的侧面中心点,并与水平面形成夹角γ,10°≤γ≤50°;具体的,优选夹角γ为15°、25°、35°或45°,穿戴者可以根据实际需求,通过调整夹角γ,对应调整辅助力矩的大小。需要说明的是,传统的外骨骼作用在踝关节上的辅助力矩太小,助力效果并不显著;进一步的,本鞋跟扣4通过设置加长力臂412,使得作用在人体踝关节上的辅助力矩在同样的预紧情况下,辅助性能倍增,应用前景相当显著。In this embodiment, the plane where the shoe
使用时,首先,将鞋后支架41夹持在鞋子后侧;然后,将线性织带的前段穿过过渡块413上的穿带孔K2,分别朝向鞋底延伸,并外扩至鞋的两侧壁,经过所述绕带孔K1后,汇合至鞋面处通过子母扣卡合固定;最后,将柔性元件42的一端与鞋后支架41上的凸缘414固接,另一端通过所述张紧机构31与套设在人体腿部的腿部配件相连。When in use, firstly, clamp the
通过以上技术方案,在具体的应用中,当穿戴者处于站立状态时,大腿织带2的两附接元件之间沿腿部表面呈离心拉伸,大腿肌肉被所述受力带21夹迫,大腿肌肉储弹性势能,并在踝关节处施加向上的辅助力矩,当人体下肢预摆动时,受力带21快速缩短,大腿肌肉弹性势能释放。Through the above technical solution, in a specific application, when the wearer is in a standing state, the
在本实施例中,通过软性外骨骼化的设计,将被动外骨骼抽象成腰带1、大腿织带2和小腿-足组件3,实现穿戴结构的轻量化以及保证穿戴时的舒适性;在步行中,人体下肢摆动会牵引传力路径的拉伸,导致大腿肌肉被夹迫,形成弹力,从而在踝关节处形成向上的助力帮助人体蹬脚离地,有效减少了人体步行时的体能消耗。In this embodiment, through the design of soft exoskeleton, the passive exoskeleton is abstracted into
如图7所示,具体的,在站立相的开始阶段(大概是10%步态周期),穿戴者的髋关节伸展且踝关节屈曲,同时膝关节保持完全伸直;所述大腿织带2随下肢的运动而被持续地离心地拉长,受力带21压迫大腿肌肉并被反馈一个反作用力,所述反作用力指向人体的髋关节附近,反作用力的一个分力随受力带21传递到人体的后腰处,另一分力传递到所述小腿-足组件3处,并作用在人体的踝关节处形成所述辅助力矩;直到预摆动相时,踝关节跖屈时,受力带21快速缩短,大腿肌肉的弹性势能被释放;本软性外骨骼基于肌肉储能的机理,在没有外部能源的情况下实现辅助步行,将被动外骨骼抽象成腰带1、大腿织带2和小腿-足组件3,实现穿戴结构的轻量化以及保证穿戴时的舒适性。As shown in Figure 7, specifically, at the beginning of the stance phase (approximately 10% of the gait cycle), the wearer's hip joints are extended and ankle joints are flexed, while the knee joints are kept fully straight; The movement of the lower limbs is continuously elongated centrifugally, the
实施例2Example 2
本发明的实施方式之一,本实施例的主要技术方案与实施例1相同,在本实施例中未作解释的特征,采用实施例1中的解释,在此不再进行赘述。本实施例与实施例1的区别在于:One of the embodiments of the present invention, the main technical solution of this embodiment is the same as that of
在本实施例中,非拉伸软性外骨骼上设置多个数据采集模块,各数据采集模块分设在穿戴者的人体各部位,或独立于外骨骼之外设置,用于采集穿戴者的运动状态数据或代谢状况数据,并反馈至一上位机展示;需要说明的是,非拉伸软性外骨骼所提供的辅助力矩对于减少穿戴者代谢能耗的成效影响颇大。然而,由于大腿织带2的三维拓扑结构以及大腿肌肉弹性势能的复杂性,很难通过计算得出非拉伸软性外骨骼的刚度以及它对踝关节的辅助力矩轮廓。进一步,设置多个数据采集模块采集穿戴者的运动状态数据,通过获取的运动状态数据对应调节辅助力矩的大小,有效减少了人体步行时的体能消耗;In this embodiment, multiple data acquisition modules are set on the non-stretch soft exoskeleton, and each data acquisition module is set separately on each part of the wearer's body, or is set independently of the exoskeleton, and is used to collect the wearer's movement Status data or metabolic status data are fed back to a host computer for display; it should be noted that the auxiliary torque provided by the non-stretch soft exoskeleton has a great influence on the effectiveness of reducing the wearer's metabolic energy consumption. However, due to the three-dimensional topology of the
具体的,所述数据采集模块包括:Specifically, the data acquisition module includes:
压力传感器,设置在第二附接元件J2与小腿-足组件3之间,用于采集穿戴者处于站立状态时受力带21所受到的预紧力数据;The pressure sensor is arranged between the second attachment element J2 and the calf-
间接热量测定设备,所述间接热量测定设备用于测量穿戴者行走时呼吸的O2流量和CO2流量,测得的数据通过使用修正的布罗克韦方程(Brockway Equation)计算出穿戴者的全代谢率,减去静态站立时测得的代谢率得到穿戴者的净代谢率;An indirect calorimetry device for measuring theO2 flow andCO2 flow of the wearer's breath while walking, the measured data is calculated by using the modified Brockway Equation (Brockway Equation) to calculate the wearer's Total metabolic rate, minus the metabolic rate measured when standing still to get the wearer's net metabolic rate;
IMU(Inertial measurement unit,即惯性测量单元)模块,用于划分穿戴者的步态周期,输出与步态周期的时序相关信号。The IMU (Inertial measurement unit, inertial measurement unit) module is used to divide the wearer's gait cycle and output the timing-related signal of the gait cycle.
所述数据采集模块还包括运动学数据采集单元,所述运动学数据采集单元包括四组标记点,各组标记点分别被安装在骨盆、一侧的大腿、小腿和脚上,各组标记点含有至少三个不共线的标记点;还包括动作捕捉系统,所述动作捕捉系统用于监测所述标记点的位置,并通过反运动学算法求解出下肢各关节的运动角。The data acquisition module also includes a kinematics data acquisition unit, and the kinematics data acquisition unit includes four groups of marking points, each group of marking points is installed on the pelvis, one side of the thigh, calf and foot respectively, each group of marking points Contains at least three non-collinear marking points; and also includes a motion capture system, which is used to monitor the position of the marking points, and solve the motion angle of each joint of the lower limbs through an inverse kinematics algorithm.
实施例3Example 3
本发明的实施方式之一,本实施例的主要技术方案与实施例1相同,在本实施例中未作解释的特征,采用实施例1中的解释,在此不再进行赘述。本实施例与实施例1的区别在于:One of the embodiments of the present invention, the main technical solution of this embodiment is the same as that of
如图8所示,在本实施例中,所述小腿-足组件3为脚套5,所述脚套5包裹在人体的踝关节上,脚套5的上部沿小腿后侧延伸,并与所述柔性元件42相连,受力带21通过作用在脚套5上,为踝关节的转动施加辅助力矩;采用柔性构造的脚套5可大大提高非拉伸软性外骨骼的穿戴舒适性,且其穿戴独立,无需鞋子等其他介质作适配,结构轻巧简便;As shown in Figure 8, in this embodiment, the calf-
具体的,所述脚套5包裹在人体的踝关节上,脚套5的上部沿小腿后侧向上延伸形成一连接部53,脚套5通过所述连接部53与所述柔性元件42相连;所述脚套5包括一具有中空内腔的脚套主体51,所述脚套主体51的内腔与人的脚型相适配,脚套主体51上还设有绑紧机构52,所述绑紧机构52包括第一绑紧带52a和第二绑紧带52b,两绑紧带通过魔术贴相互贴合,实现对人体踝关节的包裹。采用柔性构造的脚套5可大大提高软性外骨骼的穿戴舒适性,且其穿戴独立,无需鞋子等其他介质作适配,结构轻巧简便。Specifically, the
实施例4Example 4
本发明的实施方式之一,本实施例的主要技术方案与实施例1相同,在本实施例中未作解释的特征,采用实施例1中的解释,在此不再进行赘述。本实施例与实施例1的区别在于:One of the embodiments of the present invention, the main technical solution of this embodiment is the same as that of
在本实施例中,各大腿织带2上的两两受力带21之间连接有若干条分支带。具体的,受力带21具有两条,两受力带21靠近膝关节处设有所述分支带,在人体的冠状面的投影上,两受力带21与所述分支带呈“A”字形结构设置,横向设置的分支带与两受力带21一同夹迫大腿肌肉,形成弹力,从而在踝关节处提供更好的辅助力矩,减少能耗效果更佳。In this embodiment, several branch belts are connected between two stressed
实施例5Example 5
本发明的实施方式之一,本实施例的主要技术方案与实施例1相同,在本实施例中未作解释的特征,采用实施例1中的解释,在此不再进行赘述。本实施例与实施例1的区别在于:One of the embodiments of the present invention, the main technical solution of this embodiment is the same as that of
在本实施例中,所述受力带21具有4条或6条,大腿织带2的上、下两端沿腿部的两侧呈线型连接有多条受力带21,各受力带21跨越人体的膝关节,呈现包夹住大腿肌肉的形状,多条受力带21一同夹迫大腿肌肉,形成弹力,从而在踝关节处提供更好的辅助力矩,减少能耗效果更佳。In this embodiment, there are 4 or 6 stressed
根据上述说明书的揭示和教导,本发明所属领域的技术人员还可以对上述实施方式进行变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。According to the disclosure and teaching of the above-mentioned specification, those skilled in the art to which the present invention belongs can also make changes and modifications to the above-mentioned embodiment. Therefore, the present invention is not limited to the specific embodiments disclosed and described above, and some modifications and changes to the invention should also fall within the protection scope of the claims of the present invention. In addition, although some specific terms are used in this specification, these terms are only for convenience of description and do not constitute any limitation to the present invention.
Claims (10)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210940097 | 2022-08-05 | ||
| CN2022109400979 | 2022-08-05 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115771137Atrue CN115771137A (en) | 2023-03-10 |
Family
ID=85391258
Family Applications (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211543436.6APendingCN115771137A (en) | 2022-08-05 | 2022-12-02 | Non-stretching soft exoskeleton based on muscle energy storage |
| CN202223266836.5UActiveCN218790656U (en) | 2022-08-05 | 2022-12-02 | Passive helping hand suspender clothes |
| CN202211543271.2APendingCN116197878A (en) | 2022-08-05 | 2022-12-02 | Passive flexible wearable clothing and sports protective clothing based on muscle energy storage |
| CN202223266837.XUActiveCN218802264U (en) | 2022-08-05 | 2022-12-02 | Non-stretching flexible sport assistance trousers |
| CN202223266783.7UActiveCN219847277U (en) | 2022-08-05 | 2022-12-02 | Shoe part fitting |
| CN202223266785.6UActiveCN218802263U (en) | 2022-08-05 | 2022-12-02 | Non-stretching soft wearing accessory |
Family Applications After (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202223266836.5UActiveCN218790656U (en) | 2022-08-05 | 2022-12-02 | Passive helping hand suspender clothes |
| CN202211543271.2APendingCN116197878A (en) | 2022-08-05 | 2022-12-02 | Passive flexible wearable clothing and sports protective clothing based on muscle energy storage |
| CN202223266837.XUActiveCN218802264U (en) | 2022-08-05 | 2022-12-02 | Non-stretching flexible sport assistance trousers |
| CN202223266783.7UActiveCN219847277U (en) | 2022-08-05 | 2022-12-02 | Shoe part fitting |
| CN202223266785.6UActiveCN218802263U (en) | 2022-08-05 | 2022-12-02 | Non-stretching soft wearing accessory |
Country Status (1)
| Country | Link |
|---|---|
| CN (6) | CN115771137A (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115771137A (en)* | 2022-08-05 | 2023-03-10 | 广东天物新材料科技有限公司 | Non-stretching soft exoskeleton based on muscle energy storage |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4252112A (en)* | 1979-03-26 | 1981-02-24 | Joyce Raymond D | Strap device for assisting in hip, knee and foot movement |
| CN104869969A (en)* | 2012-09-17 | 2015-08-26 | 哈佛大学校长及研究员协会 | Soft exosuit for assistance with human motion |
| CN105266939A (en)* | 2015-11-30 | 2016-01-27 | 南京工程学院 | Flexible exoskeleton robot |
| US20160107309A1 (en)* | 2013-05-31 | 2016-04-21 | President And Fellows Of Harvard College | Soft Exosuit for Assistance with Human Motion |
| CN105992554A (en)* | 2013-12-09 | 2016-10-05 | 哈佛大学校长及研究员协会 | Assistive flexible suits, flexible suit systems, and methods of manufacture and control thereof for assisting human mobility |
| CN208729781U (en)* | 2018-07-16 | 2019-04-12 | 南方科技大学 | Lower limb exoskeleton power-assisted mechanism |
| CN110035733A (en)* | 2016-10-03 | 2019-07-19 | 跃动公司 | For assisting the personal enhancing suit and method of human motion |
| CN110202553A (en)* | 2019-07-05 | 2019-09-06 | 南方科技大学 | Flexible walking aid exoskeleton system with reconfigurable power-assisted path |
| KR20210040748A (en)* | 2019-10-06 | 2021-04-14 | 이종성 | X-bend type wearable musculoskeletal guard |
| CN114392131A (en)* | 2022-02-17 | 2022-04-26 | 华中科技大学 | A passive exoskeleton assisting device for hip and knee joint based on energy storage |
| CN218802263U (en)* | 2022-08-05 | 2023-04-07 | 广东天物新材料科技有限公司 | Non-stretching soft wearing accessory |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8579771B2 (en)* | 2004-08-11 | 2013-11-12 | Omnitek Partners Llc | Walk-assist devices and methods |
| EP3342390A1 (en)* | 2016-12-29 | 2018-07-04 | ETH Zurich | Apparatus for supporting a limb of a user against gravity |
| CN111230840B (en)* | 2020-02-13 | 2021-08-13 | 北京工业大学 | A flexible functional outerwear body for lower limb assist |
- 2022
- 2022-12-02CNCN202211543436.6Apatent/CN115771137A/enactivePending
- 2022-12-02CNCN202223266836.5Upatent/CN218790656U/enactiveActive
- 2022-12-02CNCN202211543271.2Apatent/CN116197878A/enactivePending
- 2022-12-02CNCN202223266837.XUpatent/CN218802264U/enactiveActive
- 2022-12-02CNCN202223266783.7Upatent/CN219847277U/enactiveActive
- 2022-12-02CNCN202223266785.6Upatent/CN218802263U/enactiveActive
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4252112A (en)* | 1979-03-26 | 1981-02-24 | Joyce Raymond D | Strap device for assisting in hip, knee and foot movement |
| CN104869969A (en)* | 2012-09-17 | 2015-08-26 | 哈佛大学校长及研究员协会 | Soft exosuit for assistance with human motion |
| US20160107309A1 (en)* | 2013-05-31 | 2016-04-21 | President And Fellows Of Harvard College | Soft Exosuit for Assistance with Human Motion |
| CN108670195A (en)* | 2013-05-31 | 2018-10-19 | 哈佛大学校长及研究员协会 | Soft machine armor for assisting human motion |
| CN105992554A (en)* | 2013-12-09 | 2016-10-05 | 哈佛大学校长及研究员协会 | Assistive flexible suits, flexible suit systems, and methods of manufacture and control thereof for assisting human mobility |
| CN105266939A (en)* | 2015-11-30 | 2016-01-27 | 南京工程学院 | Flexible exoskeleton robot |
| CN110035733A (en)* | 2016-10-03 | 2019-07-19 | 跃动公司 | For assisting the personal enhancing suit and method of human motion |
| CN208729781U (en)* | 2018-07-16 | 2019-04-12 | 南方科技大学 | Lower limb exoskeleton power-assisted mechanism |
| CN110202553A (en)* | 2019-07-05 | 2019-09-06 | 南方科技大学 | Flexible walking aid exoskeleton system with reconfigurable power-assisted path |
| KR20210040748A (en)* | 2019-10-06 | 2021-04-14 | 이종성 | X-bend type wearable musculoskeletal guard |
| CN114392131A (en)* | 2022-02-17 | 2022-04-26 | 华中科技大学 | A passive exoskeleton assisting device for hip and knee joint based on energy storage |
| CN218802263U (en)* | 2022-08-05 | 2023-04-07 | 广东天物新材料科技有限公司 | Non-stretching soft wearing accessory |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116197878A (en) | 2023-06-02 |
| CN219847277U (en) | 2023-10-20 |
| CN218802264U (en) | 2023-04-07 |
| CN218790656U (en) | 2023-04-07 |
| CN218802263U (en) | 2023-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107259661B (en) | A kind of wearable lower limb flexibility power-assisted coat | |
| US11464700B2 (en) | Soft exosuit for assistance with human motion | |
| EP0606507B1 (en) | Exercise device | |
| US8986177B2 (en) | Low profile passive exercise garment | |
| US20050193461A1 (en) | Garment | |
| US20080287840A1 (en) | Neurological motor therapy suit | |
| CN111230840B (en) | A flexible functional outerwear body for lower limb assist | |
| US9914004B2 (en) | Device and method for passive flexibility training | |
| CN110251892B (en) | Flexible lower limb exoskeleton based on variable-stiffness spring | |
| EP3437501A1 (en) | Garment | |
| US20080076645A1 (en) | Wearable elastic upper body strengthening exercise device. | |
| CN115771137A (en) | Non-stretching soft exoskeleton based on muscle energy storage | |
| EP3806965B1 (en) | Blood flow restriction sportswear garment | |
| US20230321479A1 (en) | Exercise garment with targeted resistance | |
| CN218802265U (en) | Passive flexible dress based on kinetic energy is retrieved | |
| CN211675188U (en) | Novel auxiliary walking belt | |
| US20250177813A1 (en) | Passive exosuit for asymmetry rehabilitation | |
| CN115570557B (en) | A flexible passive exoskeleton that assists walking and looks like tights | |
| CN210991588U (en) | Antagonistic belt for walking rehabilitation training of hemiplegia | |
| CN220826006U (en) | Ankle joint motion assisting flexible exoskeleton device | |
| CN214632541U (en) | Lower limb correction belt | |
| CN218870611U (en) | Lower limb correction harness | |
| US11607333B2 (en) | Core training suit for scoliosis | |
| CA2850861C (en) | Device and method for passive flexibility training | |
| TWM637708U (en) | Multi-axial back adjustment strap |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |